5236001154
Wyznacz macierze transformacji
Wymiary geometryczne manipulatora
Zadane położenie układu efektora x y z
Pozycja | 0 | | 0 | | 0
alfa beta teta
Orientacja | 0 | | 0 | | 0
|
Rotacja wokoł osi X |
Rotacja osi Y |
|
o o o |
o o o |
|
o o o |
o o o |
|
o o o |
o o o |
Rotacji osi Z
Translacja Globalna macierz transformacji
Długość członu łączącego efektor z podporą - k 120
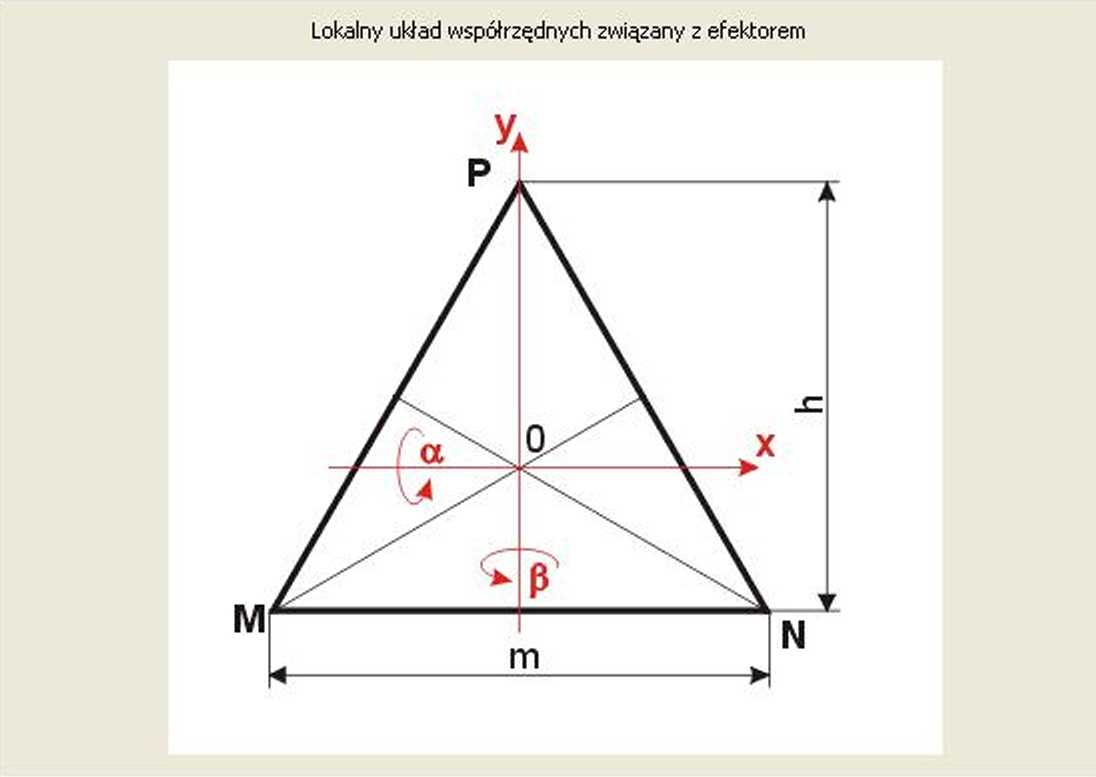
Długość boku efektoram - m 100
0P^ożenie.efektora poprzez opis lotain^^ |Tryb projektowania i SYMULACJI KOMPUTEROWEJ
O Położenie efektora poprzez pozycje trzech punktów M, N i P
Informacje
Wyznacz punkty M, N, P
|
— 0 |
-1 0 |
0 |
|
0 |
0 |
0 |
|
0 |
0 |
0 |
|MN| m | NP |
| PM |
Wyznacz punkty D,E,F
D 0
E 0
F 0
Rozwiąż zadanie odwrotne kinematyki wyznaczając punkty A, B, i C
|AD| k |BE|
|CF| 0
Wykreśl manipulator
Tryb weryfikacji POMIARÓW DOŚWIADCZALNYCH
Zamknij
Wyszukiwarka
Podobne podstrony:
Triplanar - położenie - efektor trójkątnywersja 1.3 Pozycja 100 alfa Orientacja 15
Triplanar - położenie - efektor trójkątnywersja 1.3 Zadane położenie układu efektora
Dane Dwa położenia efekt ora: xs, ys, zs, a, p, 0 Wymiary geometryczne manipulatora: m, k Traje
Dane Dwa położenie efektora: xs, ys, zs, a, p, 0 Wymiary geometryczne manipulatora: m, kI Rozwiązani
Dane Dwa położenia efektora: xs, ys, z# a, p, 9 Dwa we Dory prędkości efektora: Vx, VY, Vz Wymi
DSC00010 (25) 3 Wyznaczyć położeni# Arodka ciążkoAci figury płaskiej o kształcie i wymiarach przedst
12 10 WYZNACZNIK MACIERZY Rozwinięcie wyznacznika macierzy o wymiarze 3x3 według twierdzenia Laplace
48 (165) Rozwiązanie Aby obliczyć wartości wyznaczników macierzy A (jest to macierz trójkątna), możn
MATEMATYKA 3. MACIERZE I WYZNACZNIKI Przez macierz trójkątna rozumiemy macierz hi 0 . ..
Metody numeryczne - opracowanie Wyznacznik macierzy trójkątnej = iloczyn elementów na przekątnej Ukł
zdj Zadanie 2. (4p) Obliczyć wyznacznik macierzy.
skanuj0023 (125) Stwierdzono, że wyznacznik z macierzy przy niewiadomych jest różny od zera, wobec t
s118 119 1183.3. Macierz odwrotna 1. Wyznaczyć macierz odwrotną macierzy "1 2 -3 A = 2 -
Wyznaczanie macierzy [ABCD] Pracownia Optoelektroniki, Specjalność Fizyka MedycznaI.
Pracownia Optoelektroniki, Specjalność Fizyka Medyczna Wyznaczanie macierzy [ABCD] albo w postaci
więcej podobnych podstron