5236001155
Pozycja
100
alfa
Orientacja 15 25
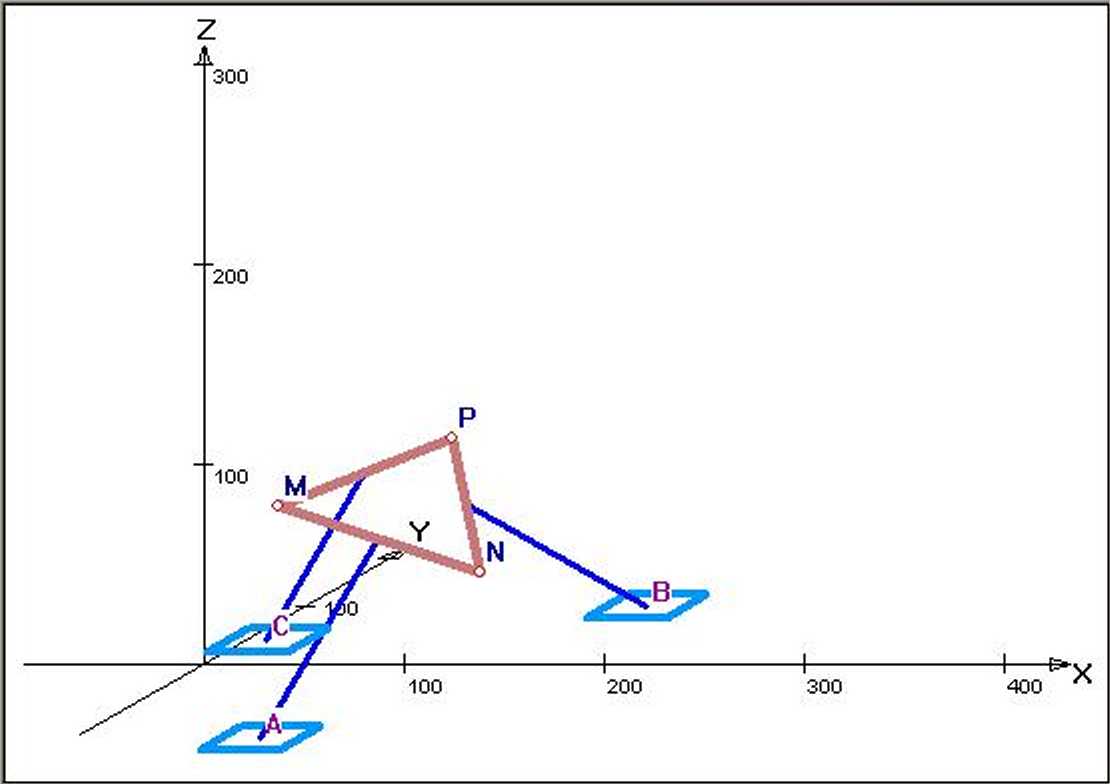
Wymiary geometryczne manipulatora
Zadane położenie układu efektora x y z
80
beta teta
5
Wyznacz macierze transformacji
|
Rotacja wokół osi X |
Rotacja osi Y |
Rotacji osi Z |
Translacja |
Globalna macierz transformacji | ||||||||
|
i |
0 |
0 |
0.90< 0 |
0.42^ 0.99< |
-0.08 |
0 |
100 |
0.90; |
-0.07 |
0.42: |
100 | |
|
1 |
0 |
0.961 |
-0.2E |
0 1 |
0 0.081 |
0.99( |
0 |
0 |
0.19: |
0.95: |
-0.22 |
0 |
|
] |
0 |
0.251 |
0.965 |
-0.42 0 |
0.90< 0 |
0 |
1 |
80 |
-0.38 |
0.29: |
0.875 |
80 |
Długość boku efektoram - m 100
Długość członu łączącego efektor z podporą - k 120
0 Położenie efektora poprzez opis lokalnego układu współrzędnych | Tryb projektowania i SYMULACJI KOMPUTEROWEJ O Położenie efektora poprzez pozycje trzech punktów M, N i P
Informacje
Wyznacz punkty M, N, P
|
57.1: |
-37.1 |
90.7: |
|
147.* |
,7, |
52.3; |
|
95.4: |
55.01 |
96.9- |
|MN| 100 m | NP |
| PM |
100
100
Wyznacz punkty D,E,F
|
102.: |
-27.5 |
71.5; |
|
121.• |
18.5: |
74.6: |
76.2;
8.92;
93.8:
Rozwiąż zadanie odwrotne kinematyki wyznaczając punkty A, B, i C
|
92.3! |
-123 |
0 |
|
170.1 |
98.9; |
0 |
|
9.66; |
42.9: |
0 |
|AD|
|BE|
120
120
|CF| 120
Wykreśl manipulator
Tryb weryfikacji POMIARÓW DOŚWIADCZALNYCH
Zamknij
Wyszukiwarka
Podobne podstrony:
Triplanar - położenie - efektor trójkątnywersja 1.3 Wyznacz macierze transformacji Wymiary geometryc
Triplanar - położenie - efektor trójkątnywersja 1.3 Zadane położenie układu efektora
Dane Dwa położenie efektora: xs, ys, zs, a, p, 0 Wymiary geometryczne manipulatora: m, kI Rozwiązani
Dane Dwa położenia efektora: xs, ys, z# a, p, 9 Dwa we Dory prędkości efektora: Vx, VY, Vz Wymi
Procentowa wartość pozycji -100 1.4 1.375 1.35 1.325 1.3 1.275 Cena 1.25 Mar 13 May 13
trojkat?reta Trójkąt Fereta 100 Kolorem czei określenie ro< wykresu uzia slajdzie nr 8
tn IMG!23 Trójkąty sz%/>Trójkąt {.językowej (Beckarda) Położenie ♦ Trójkąt
(x, y, z). Jednak nie każdy wektor położenia umożliwia wyznaczenie pozycji geograficznej obiektu. We
KLOPS W ŚMIETANIE KLOPS W ŚMIETANIE Składniki na 1 porcję: 100 g karczku wieprzowego, 15 g bulki, 1/
skanuj0095 100 Rozdział 7. Rys. 7.15. Polaryskop do badań z wykorzystaniem światła odbitego W przeci
Inicjatywa ustawodawcza Posłowie Senat Prezydent Rada Ministrów 100 tvś. -- obywateli 15 posłów
274 (21) 274 Położenie narządów jamy brzusznej - przekrój podłużny 14 15 16 17 18
277 (12) 15. OKREŚLANIE POZYCJI ASTRONOMICZNEJ Z DWÓCHUNII POZYCYJNYCH 15.1. LINIA POZYCYJNA A POZYC
str13 Zadanie D Przy założeniu, że IQ ma w populacji rozkład normalny ze średnią 100 i odchyleniem s
SWScan00054 94 Kontrakty terminowe i opcje Tabela 4.2 Długa pozycja zabezpieczająca. Z warsztatu inw
projekt gadżet PŁYN 100 ml ŻEL 15 ml ŻEL 50 ml ŻEL 50 ml ŻEL 30 ml PŁYN 50 ml PŁYN
więcej podobnych podstron