5460978355
Mikrokontrolery i mikrosystemy - Z' 3
I. Zagadnienia elementarne i ich treści obowiązujące do pierwszego kolokwium z części „Mikrokontrolery”:
1. Definicja mikrokontrolera (w skrócie: mk), dwie najważniejsze cechy jego jednostki centralnej.
Mk można zdefiniować następująco:
• układ cyfrowy z wyspecjalizowanym mikroprocesorem i niezbędnymi do jego samodzielnej pracy urządzeniami zawartymi w jednym układzie scalonym (dzięki którym nie wymaga urządzeń zewnętrznych, takich jak np. kontrolery magistral, przerwań, generatory sygnałów taktujących mikroprocesor, itp.),
• jest zdolny do autonomicznej pracy, tzn. w najprostszych zastosowaniach nie wymaga przyłączenia zewnętrznych układów pomocniczych (peryferyjnych),
• został zaprojektowany do pracy w systemach kontrolno-pomiarowych oraz komunikacyjnych, stąd posiada rozbudowany system komunikacji z otoczeniem,
• z reguły pracuje w czasie rzeczywistym.
Cechy jednostki centralnej:
• szerokość szyny danych. Może być ona 8-bitowa, 16-bitowa lub 32-bitowa.
• częstotliwość sygnału taktującego (zegarowego). Jej wartość powinna być jak najmniejsza, ponieważ pobór mocy przez mikrokontroler proporcjonalny jest do częstotliwości sygnału zegarowego, ale jednocześnie na tyle duża, aby zapewnić wymaganą minimalną prędkość przetwarzania danych przez jednostkę centralną.
2. Uszczegółowiona budowa mk oraz funkcje realizowane przez jego bloki.
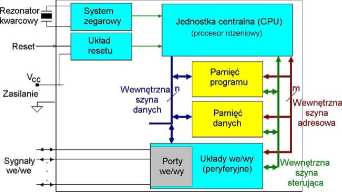
• Jednostka centralna (dokładniej zawarty w niej mikroprocesor) realizuje program zawarty w pamięci programu (typu FLASH).
• Zmienne programu przechowywane są w pamięci danych SRAM.
• Jednostka centralna jak i pozostałe wewnętrzne bloki mk są taktowane sygnałem zegarowym (clock), generowanym i rozprowadzanym przez system zegarowy. Częstotliwość sygnału zegarowego może być stabilizowana np. zewnętrznym oscylatorem kwarcowym.
• W stan początkowy mk wprowadzany jest sygnałem RESET generowanym przez układ resetu.
• Układy peryferyjne umożliwiają odczyt sygnałów wejściowych cyfrowych, jak i również analogowych (przetworniki A/C) oraz generację sygnałów wyjściowych stosowanych do sterowania układami mse. Komunikacja z otoczeniem mk odbywa się za pośrednictwem linii portów we/wy.
Wyszukiwarka
Podobne podstrony:
Mikrokontrolery i mikrosystemy -Zs 12II. Zagadnienia elementarne i ich treści obowiązujące do drugie
26 WALERY PISAREK czytelników zainteresowanych ich treścią i zdolnych do jej przyswojenia. Kiedy mów
Mikrokontrolery i mikrosystemy - Z" 18 Znaczenie linii: CS - wybór układu do transmisji (aktywn
Mikrokontrolery i mikrosystemy -Z3 165. Tryby pracy układów SPLD standardu GAL16V8 oraz ich ogranicz
skanuj0019 (165) WSPÓŁCZESNA TURYSTYKA KULTUROWA 23 i miejscowości bardzo różnych elementów ich kraj
SNV36449 RÓŻANY KRZYŻ 67 nowią bowiem próbę dyskretnego sprostowania ich treści. W 1610 r. Andrea z
Piotrowska inteligencja�2 350 •• • AW/A pjÓTlIOWSIĆA .w-icnie. liczba elemen
Zestaw zagadnień na egzamin inżynierski OBOWIĄZUJĄCY W ROKU AKADEMICKIM: 2013/2014 ORAZ
page0036 ZAGADNIENIA OGÓLNE ich nosicieli. Jest ono wyrażone przejrzystym znaczeniowo przezwiskiem o
IMGQ19 Mikrosatelity Są to 1-6 nukleotydowe powtórzenia o n od kilku do ok. 50; może ich przypadać d
książka (122) Elementy prawa zasada informowania stron - mówi ona, że organy administracji ubl są ob
15403 Str015 (2) 26 J. Kilku zagadnień elementarnej teorii licrh 16. Niech n będzie bardzo dużą licz
więcej podobnych podstron