5783291265
Kinematyka
Kinematyka
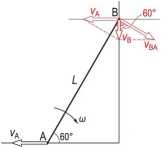
Rys. 2.3.
kierunek prędkości uB
Prędkość względną i>ba określamy następująco: i»ba =a-L
gdzie prędkość kątowa pręta co jest niewiadomą.
Na rysunku 2.3 przedstawiono schemat obliczeniowy. Jeżeli zrzutujemy wektory w punkcie B, na kierunek prędkości i>b i kierunek prostopadły do niego, to otrzymamy następujący układ równań:
jv B = vBaCos(60o)
[- vA + Vba sin(60°) = 0
Z drugiego równania wyznaczamy vba i podstawiamy do równania pierwszego:
yBA —----
sin(60°)
= . v* cos(60°) = va ctg (60°) sin(60°)
vb

Dodatkowo możemy wyznaczyć prędkość kątową a :
va _ 2-y/3 vA Lsin(60°) 3 L

Metoda III
Kolejnym sposobem rozwiązania zadania jest metoda chwilowego środka obrotu. Punkt ten, w rozpatrywanym zadaniu oznaczony jako S (rys. 2.4), znajduje się na przecięciu prostych prostopadłych do kierunków prędkości w punktach A i B.
Prędkość kątowa co jest równa:
Lsin(60°)
a prędkość punktu B wynosi:
Vb = co ■ Lcos(60°) =
Lsin(60c
V3„
• Lcos(60°) = yActg(60°)

Rys. 2.5.
Wyszukiwarka
Podobne podstrony:
18075 P1520641 Rys. 4.6. Kierunek i prędkość rozprzestrzeniania się bodźców w układzie bodź-coprzewo
Laboratorium: Procesy obróbki ubytkowej może być przeciwbieżne (Rys. 9) (kierunki prędkości ruchu
skanuj0003 (539) Rys.4. Wektor prędkości V względem włókna sondy. Składowe wektora u,v,w na osi
KINEMATYKA0003 KINEMATYKA Prędkość względna. Jeżeli dwa ciała poruszają się lak. że wektor prędkości
Obraz0219 219 Rys. 12.16. Ruchy posuwowe (kierunki i prędkości) przy wzdłużnym obwodowym szlifowaniu
Zdjęcie0090 (12) KINEMATYKAciała sztywnego w Średnią prędkość kątową określamy jako iloraz różnicowy
47560 OMiUP t1 Gorski$2 gdzie: p —gęstość gazu, Awu=w1l( - w2u- przyrost rzutów prędkości względnych
zad02 ĆWICZENIA 2. Data Elementy kinematyki (ccL) i dynamiki Prędkość kątowa: Aa
23 luty 07 (46) VCB Składanie prędkości unoszenia i prędkości względnej Rys. 2.7. Wyznaczanie przewo
img069 (21) Z kolei podwojony iloczyn wektorowy prędkości kątowej • i prędkości względnej vw jest pr
Rys. 10. Rejestracja widma drgań względnych: a) w kierunku poziomym (horizonlal), b) w kierunku pion
więcej podobnych podstron