8508892946
ROZDZIAŁ 1. SPOOFING W SYSTEMIE GPS
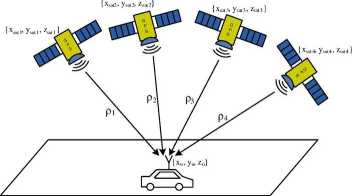
Rysunek 1.1: Zasada określania pozycji w systemie GPS
W systemach GNSS transmitowane są sygnały z bezpośrednio rozproszonym widmem, które są modulowane binarnymi ciągami pseudolosowymi. W przypadku cywilnych sygnałów GPS jest to zbiór 37 ciągów, nazywanych ciągami C/A, stanowiących sekwencje Golda o długości 1023 bitów każda [40]. Ciągi sygnałów militarnych są oznaczone symbolem P(Y). Funkcje autokorelacji ciągów C/A i P(Y) przypominają funkcję autokorelacji szumu, osiągając maksimum w zerze i znacznie mniejsze wartości dla argumentów niezerowych. Pozwala to dokładnie określić chwilę początku ciągu pseudolosowego. Ciąg pseudolosowy C/A powtarzany jest co 1 ms, natomiast szybkość transmisji danych nawigacyjnych wynosi 50 bit/s. Zatem na jeden bit danych przypada dwadzieścia powtórzeń ciągu Golda. Ustalenie chwil czasu, w których rozpoczęto odbiór pierwszego ciągu w określonej ramce danych, umożliwia precyzyjne określenie różnic czasów propagacji sygnałów pochodzących od różnych satelitów.
1.1.2 Czynniki warunkujące dostępność usługi lokalizacyjnej GPS
Niezawodność procesu określania lokalizacji odbiornika GPS jest zdeterminowana przez możliwość ciągłego odbioru prawidłowych sygnałów nawigacyjnych, które przenoszą informacje niezbędne do wyznaczenia położenia. Istnieje wiele czynników, które mogą spowodować, że jakość
Wyszukiwarka
Podobne podstrony:
6 ROZDZIAŁ 1. SPOOFING W SYSTEMIE GPS 1.1.1 Charakterystyka ogólna systemu GPS System GPS-NAVSTAR (a
10 ROZDZIAŁ 1. SPOOFING W SYSTEMIE GPS Zależność pomiędzy SNR (stosunkiem mocy sygnału C/A do mocy s
P1080223 4. Wprowadzenie do bnematyłri robotów Rysunek 4^_______ Przesunięcie określające pozycję pu
Poziomy dokładności System GPS oferuje dwa poziomy dokładności określania pozycji: -
skanuj0175 (8) Rozdział 7. ♦ System plików 187 Rysunek 7.1. Efekt działania skryptu wyświetlającego
skanuj0199 (5) Rozdział 7. ♦ System plików 211 Rysunek 7.9. Przykładowy -1b£i o ; Edycja a** P
skanuj0209 (4) Rozdział 7. ♦ System plików 221 Rysunek 7.13. Przykładowy efekt działania skryptu&nbs
Rozdział 2Odbiornik systemu NAYSTAR-GPS Na odbiornik sygnału nawigacyjnego (rys. 2.1) składają się d
45262 skanuj0612 Rozdział 8 L-—- Mikowo wydzielono strategiczne : B określono pozycję
065 2 - szczegółowe informacje dotyczące elektronicznych systemów określania pozyc
Rozdział H. ♦ System Nodes 433 Zacznijmy od omówienia pierwszej z nich (rysunek 11.14). Jak sama naz
więcej podobnych podstron