100 4
100 Modelowanie dmomiki obiektów sterowania
|
an-1 |
an |
0 |
0 |
0 • |
0 |
|
"tt-3 |
"h-2 |
an-1 |
0 • |
•• 0 | |
|
an- 5 |
4 |
»n 3 |
an-2 |
0 • |
•• 0 |
(11.26)
|
0 |
"0 |
"1 |
a2 |
"3 |
"4 |
|
0 |
0 |
0 |
"0 |
"1 |
"2 |
|
0 |
0 |
0 |
0 |
0 |
"0 |
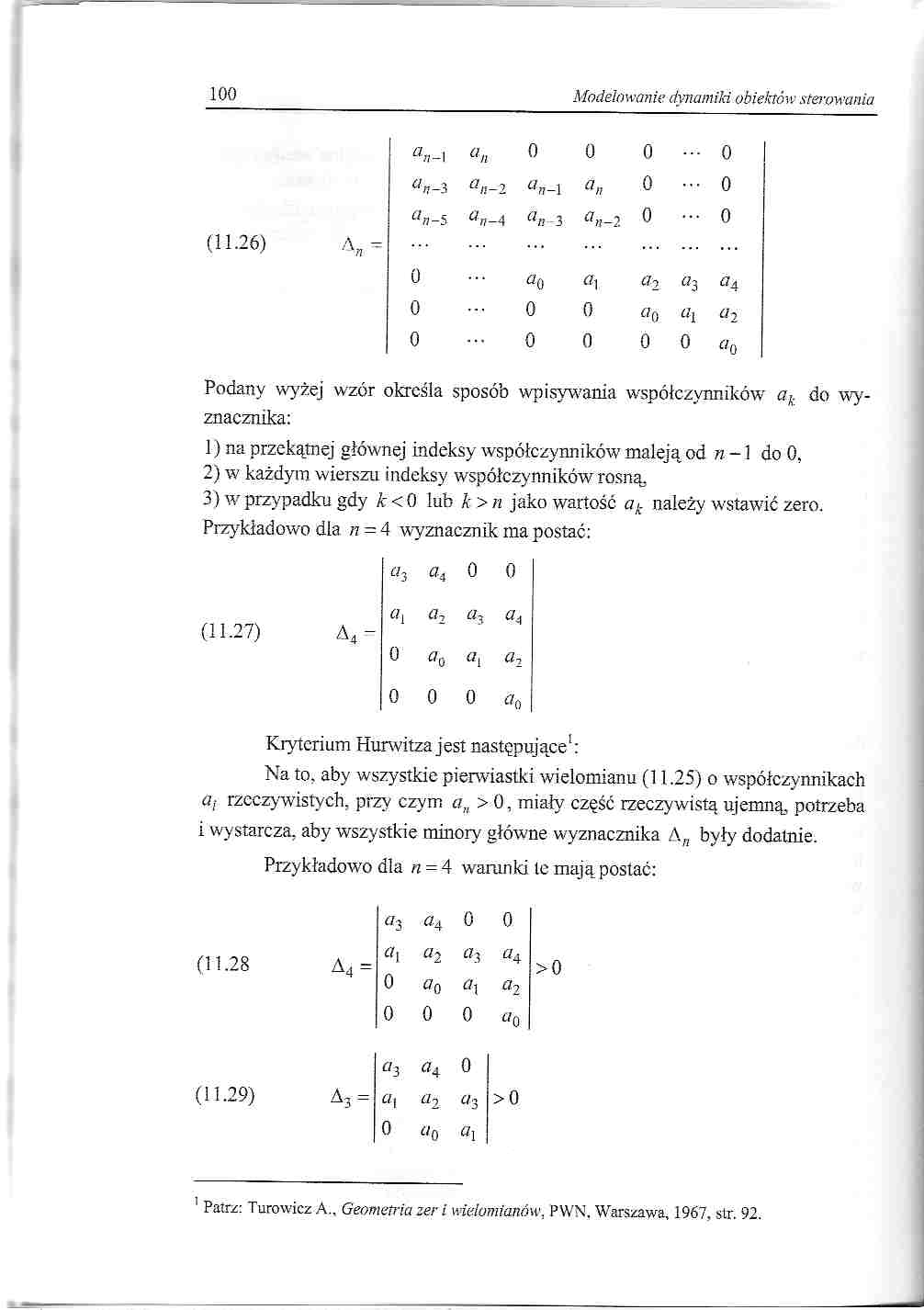
Podany wyżej wzór określa sposób wpisywania współczynników ak do wyznacznika:
1) na przekątnej głównej indeksy współczynników maleją od n -1 do 0.
2) w każdym wierszu indeksy współczynników rosną.
3) w przypadku gdy k < 0 lub k > n jako wartość ak należy wstawić zero. Przykładowo dla 77 = 4 wyznacznik ma postać:
|
"3 |
a4 |
0 |
0 |
|
"l |
ai |
"3 |
a4 |
|
0 |
"o |
"l |
a2 |
|
0 |
0 |
0 |
"o |
(11.27)
Kryterium Hurwitza jest następujące1:
Na to. aby wszystkie pierwiastki wielomianu (11.25) o współczynnikach a, rzeczywistych, przy czym a„ > 0, miały część rzeczywistą ujemną, potrzeba i wystarcza, aby wszystkie minory główne wyznacznika A„ były dodatnie. Przykładowo dla n = 4 warunki tc mają postać:
|
"3 |
a4 |
0 |
0 |
|
"i |
“2 |
«3 |
a4 |
|
0 |
"0 |
"1 |
Qh |
|
0 |
0 |
0 |
"0 |
|
"3 |
«4 |
0 | |
|
"l |
U2 |
"3 |
>0 |
|
0 |
"0 |
«1 |
(11.28
(11.29)
Patrz: Turowicz A., Geometria zer i wielomianów, PWN. Warszawa, 1967, sir. 92.
Wyszukiwarka
Podobne podstrony:
040 3 40 Modelowanie dynamiki obiektów sterowania t (5.7) y{1) - F(u)(l) =
042 4 42 Modelowanie dynamiki obiektów sterowania 42 Modelowanie dynamiki obiektów sterowania (6.2)
44 Modelowanie dynamiki obiektów sterowania Otrzymamy: X (6.12) y(t )=
048 2 48 Modelowanie dvnamiki obiektów sterowania Zagadnienie powyższe przyjmuje też formą zagadnien
050 4 50 Modelowanie dynamiki obiektów sterowania Przyjmiemy, że znana jest wartość początkowa x(V0)
054 2 54 Modelowanie dynamiki obiektów sterowania (7.18) x(/ + rWv,W)x(o) Podobnie
056 3 56 Modelowanie dynamiki obiektów sterowania równania (7.29) x(f)= Ax(/) opis
058 3 58 Modelowanie dynamiki obiektów sterowania Łatwo spostrzec, że pierwszy składnik stanowi skła
060 5 60 Modelowanie dynamiki obiektów sterowania Zjawiły się słowa, języki. prawa, nauki i sztuki p
062 4 62 Modelowanie dynamiki obiektów sterowania Tabl. 8.2 Przykłady transformat Laplace’a
064 4 64 Modelowanie dynamiki obiektów sterowania Wielomian występujący vr mianowniku ma trzy pierwi
068 3 68 Modelowanie dynamiki obiektów sterowania s,. s2,.... sr. przy czym krotność poszczególnych
074 3 74 Modelowanie dynamiki obiektów sterowania układu. Strumień y(t) wypływającej wody z drugiego
076 2 76 Modelowanie dynamiki obiektów sterowania W wyniku zastosowania przekształcenia Laplace a do
078 3 78 Modelowanie dynamiki obiektów sterowania W sposób analogiczny wyznaczamy transmitancję równ
080 2 80 Modelowanie chnainiki obiektów sterowania (9.28) H(s) = k T2s2 + 2 ą’s +1 Układ opóźniający
S2 Modelowanie dynamiki obiektów sterowania Rozpatrywany układ nie jest układam oscylacyjnym. Po wyl
084 2 84 Modelowanie dvnamiki obiektów sterowania 2) amplitudy zespolone sygnału wejściowego i sygna
086 2 86 Modelowanie dvnamiki obiektów sterowania 86 Modelowanie dvnamiki obiektów sterowania (9.64)
więcej podobnych podstron