Rok II A. i R. |
LELEK PAWEŁ GRZEGORZ MALCHEREK |
4-III-1998 |
Ćw. nr 2
|
IDENTYFIKACJA OBIEKTU DYNAMICZNEGO
|
|
Celem ćwiczenia jest zapoznanie się z zasadą działania różnego rodzaju obiektów dynamicznych zaprojektowanych na tablicy symulacyjnej za pomocą odpowiednich współczynników macierzy A, B, C i D.
Wyznaczanie parametrów macierzy
Grupy podstawowych członów dynamicznych są to przede wszystkim układy o jednym wejściu i jednym wyjściu, opisane równaniem stanu liniowym rzędu co najwyżej drugiego :
![]()
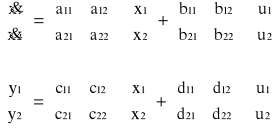
czyli w postaci zwykłych równań:
Aby wyznaczyć parametry macierzy poszczególnych członów dynamicznych porównujemy współczynniki przy poszczególnych zmiennych z powyższych równań, przy czym najczęściej przyjmuje się, że równania rzędu pierwszego.
Badanie poszczególnych członów.
a) człon całkujący
![]()
![]()
[A]=0, [B]=1, [C]=kr=1, [D]=0
G(s) = C·(s·I-A)-1·B + D
G(s) = kr·(s)-1·1+0 = kr / s wynik poprawny
b) człon inercyjny
![]()
![]()
[A]=-1, [B]=1, [C]=kp=1, [D]=0

wynik poprawny
c) człon różniczkujący rzeczywisty
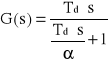
![]()
[A]=-1=-, [B]=1= , [C]=-1=- , [D]= =1
Ponieważ układ symulacyjny nie ma możliwości podania wartości D=1 zamienimy:
[C]=1= , [D]= =-1 oraz zmieniamy U1 na ujemne.

d) człon proporcjonalno-całkujący
![]()
![]()
[A]=0, [B]=1= , [C]=1=kp, [D]=1=kp
Ponieważ układ symulacyjny nie ma możliwości podania wartości D=1 zamienimy:
[C]=-1= kp, [D]= kp =-1 oraz zmieniamy U1 na ujemne.
![]()
wynik jest poprawny
e) przesuwnik fazowy
![]()
![]()
[A]=-1/T, [B]=1/T, [C]=2 [D]=-1
ponieważ nie potrafimy dokonać nastawy C=2 dajemy C=1

wynik poprawny
f) element oscylacyjny
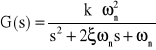

Uwagi i wnioski
Znajomość podstawowych elementów dynamicznych daje nam możliwość identyfikacji bardziej złożonych elementów. Z charakterystyk h(t), które są odpowiedziami każdego elementu na impuls jednostkowy możemy z pewną dokładnością, która jest przede wszystkim zależna od dokładności rejestratora przebiegu, zidentyfikować rodzaj elementu dynamicznego, oraz w przybliżeniu określić parametry występujące w równaniach stanu, równaniu wyjścia oraz transmitancji operatorowej. Stosując w niektórych przypadkach zamianę parametrów macierzy i znaku sygnału wymuszającego mogliśmy zasymulować układy które nie mogły być utworzone na tablicy z powodu ograniczeń w możliwych wartościach macierzy [D]. Zmiana znaków elementów macierzy [C] , [D] oraz zmiana znaku sygnału wymuszającego fizycznie odpowiada pomnożeniu równania wyjścia przez -1. Po odczytaniu niektórych parametrów z charakterystyk wykreślonych przez ploter dochodzimy do wniosku, że są one bardzo bliskie wartościom użytym w elementach macierzy symulujących układ.
Identyfikacja obiektu dynamicznego
3
Wyszukiwarka
Podobne podstrony:
AJ Identyfikacja kationów III grupy, ~FARMACJA, I rok, chemia (ciul wie co), Semestr I
badania identyfikujące E.coli, materiały farmacja, Materiały 4 rok, epidemiologia, Higiena i epidemi
Identyfikacja tworzyw sztucznych, Energetyka, I rok, chemia
Lekcja kliniczna 2 VI rok WL
Inwolucja połogowa i opieka poporodowa studenci V rok wam 5
download Prawo PrawoAW Prawo A W sem I rok akadem 2008 2009 Prezentacja prawo europejskie, A W ppt
download Finanse międzynarodowe FINANSE MIĘDZYNARODOWE WSZiM ROK III SPEC ZF
V rok seminariumt ppt
w 13 III rok VI sem
Ćwiczenia i seminarium 1 IV rok 2014 15 druk
Radioterapia VI rok (nowa wersja2)
identyfikacja analiza i ocena zagrozen
Nowy rok[1]
Otyłość rok III semestr VI
6 Identyfikacja antropologiczna
więcej podobnych podstron