Politechnika Warszawska
Instytut Automatyki i Robotyki
Prof. dr hab. in
ż
. Jan Maciej Ko
ś
cielny
PODSTAWY AUTOMATYKI
PODSTAWY AUTOMATYKI
3. P
odstawowe elementy liniowe
2
Zało
ż
enia
Elementy mechaniczne
:
•
wyst
ę
puje jedynie tarcie lepkie (wiskotyczne)
,
a nie tarcie suche
- siła tarcia jest proporcjonalna do pr
ę
dko
ś
ci
Wiele elementów automatyki mo
ż
na traktowa
ć
jako liniowe, je
ż
eli
:
•
ograniczy si
ę
zakres ich pracy
•
przyjmie nast
ę
puj
ą
ce zało
ż
enia upraszczaj
ą
ce:
- siła tarcia jest proporcjonalna do pr
ę
dko
ś
ci
•
sztywno
ś
ci elementów spr
ęż
ystych s
ą
stałe
Elementy płynowe
:
•
opór przepływu jest stały
- nat
ęż
enie przepływu jest proporcjonalne do ró
ż
nicy ci
ś
nie
ń
•
współczynnik
ś
ci
ś
liwo
ś
ci płynu jest stały
Elementy elektryczne:
•
rezystancje, indukcyjno
ś
ci i pojemno
ś
ci s
ą
stałe i niezale
ż
ne od
przepływaj
ą
cego pr
ą
du i napi
ę
cia
3
Ze wzgl
ę
du na własno
ś
ci dynamiczne:
• bezinercyjne (proporcjonalne)
• inercyjne
• całkuj
ą
ce
• ró
ż
niczkuj
ą
ce (idealne i rzeczywiste)
• oscylacyjne
• opó
ź
niaj
ą
ce
Podział elementów liniowych
Elementy charakteryzuj
ą
:
Wła
ś
ciwo
ś
ci statyczne:
charakterystyka statyczna y = f(u)
Wła
ś
ciwo
ś
ci dynamiczne:
równanie ró
ż
niczkowe
transmitancja operatorowa
odpowied
ź
na zakłócenie skokowe
charakterystyki cz
ę
stotliwo
ś
ciowe

4
Elementy bezinercyjne (proporcjonalne)
Równanie ró
ż
niczkowe (równe charakterystyce statycznej y=ku)
y – wielko
ść
wyj
ś
ciowa
u – wielko
ść
wej
ś
ciowa
k – współczynnik proporcjonalno
ś
ci (wzmocnienie)
Transmitancja
s
y )
(
)
(
)
(
t
ku
t
y
=
Transmitancja
k
s
u
s
y
s
G
=
=
)
(
)
(
)
(
Odpowied
ź
na wymuszenie skokowe:
st
ku
t
t
y
)
(
1
)
(
=
st
u
t
t
u
)
(
1
)
(
=
y (t)
u(t)
u
st
ku
st
5
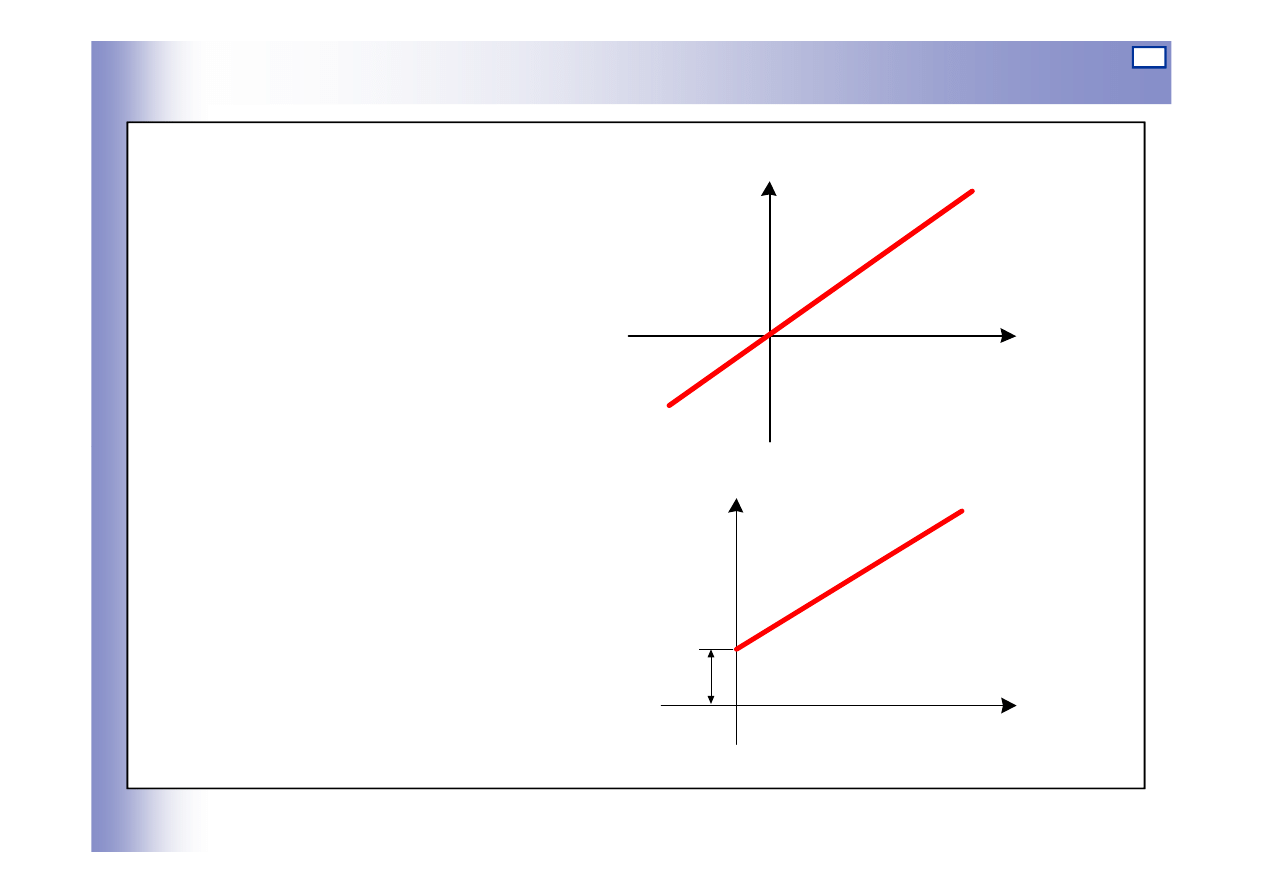
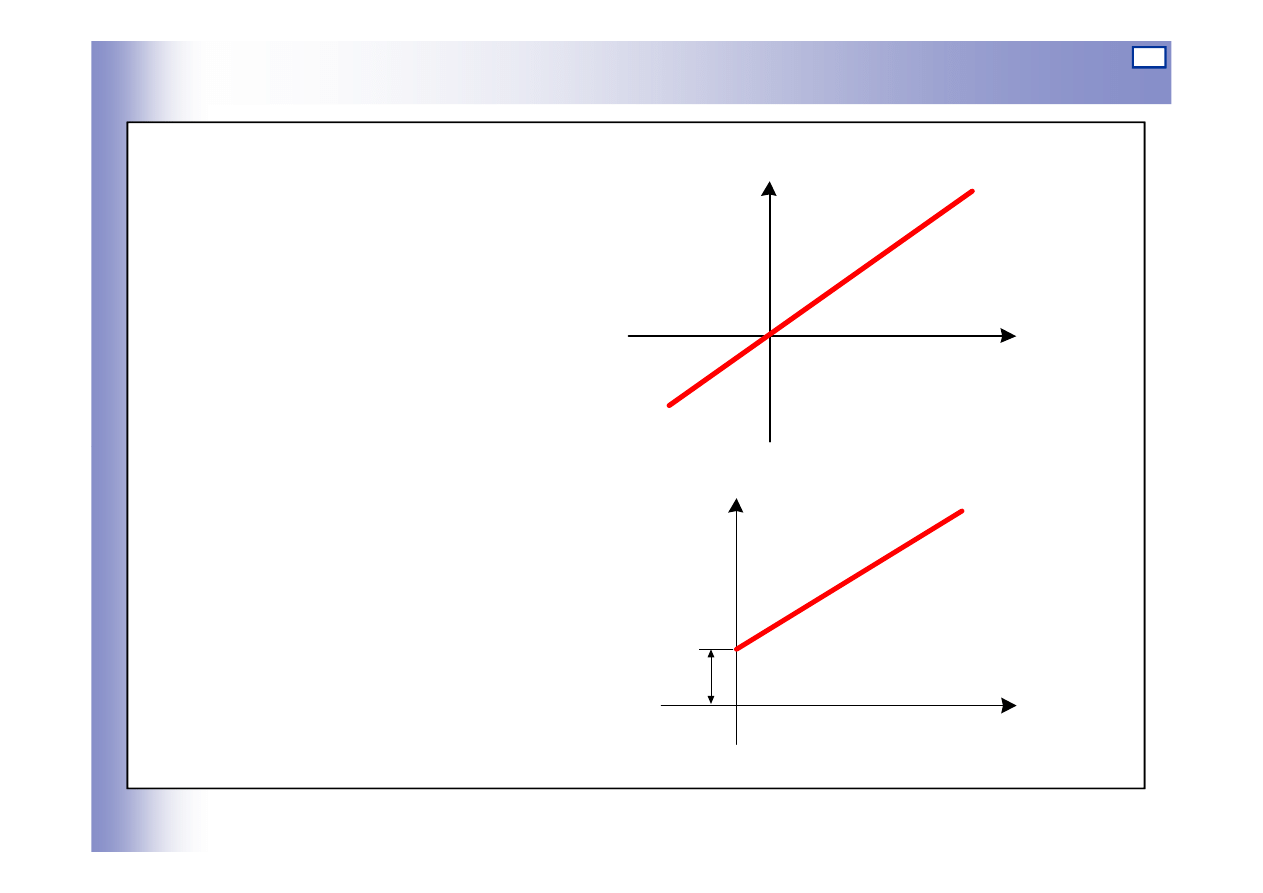
Elementy bezinercyjne (proporcjonalne)
Charakterystyka statyczna
we współrz
ę
dnych:
a) odchyłek
ku
y
=
u
y
a)
b) warto
ś
ci absolutnych
C
ku
y
+
=
0
0
u
0
y
0
c
0
b)
6
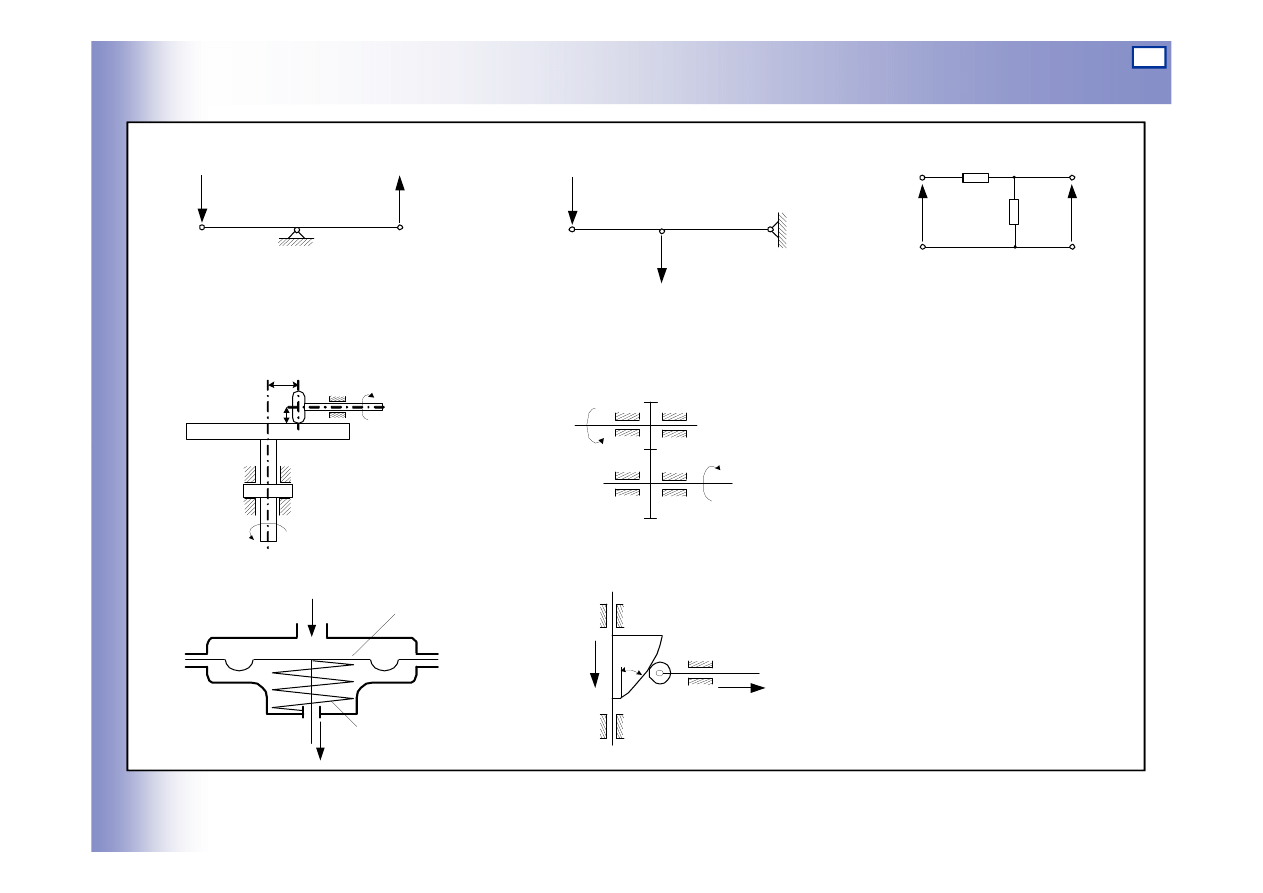
Elementy bezinercyjne – przykłady
a b
u
y
F
u
F
y
a)
a b
u
y
F
u
F
y
b)
u
2
u
1
R
1
R
2
c)
d)
r
x
?
2
n
1
z
1
e)
a, b) d
ź
wignia
?
1
1
n
2
z
2
p
A
c
y
f)
x
y
?
g)
c) dzielnik napi
ę
cia
d) przekładnia cierna
e) przekładnia z
ę
bata
f) siłownik
pneumatyczny
g) mechanizm
krzywkowy
7
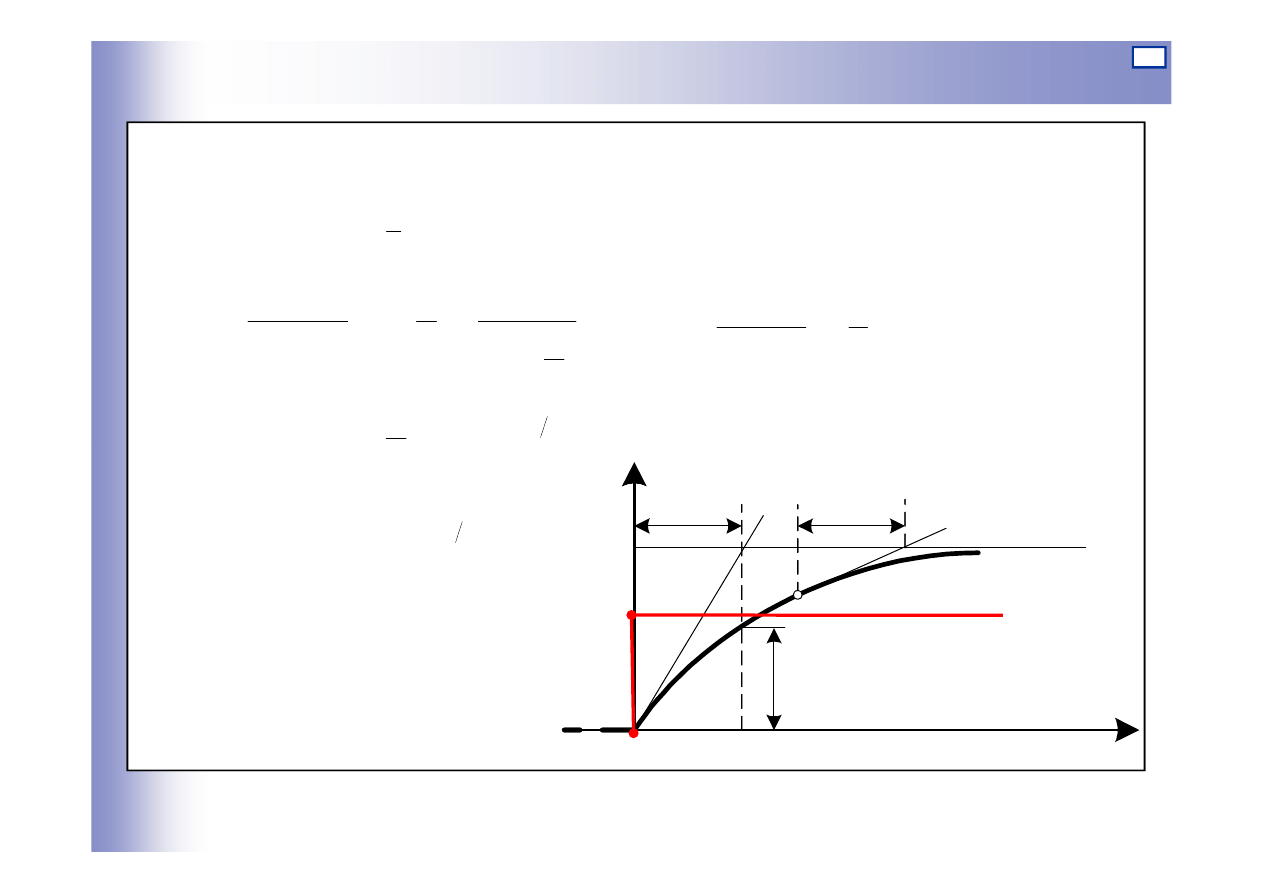
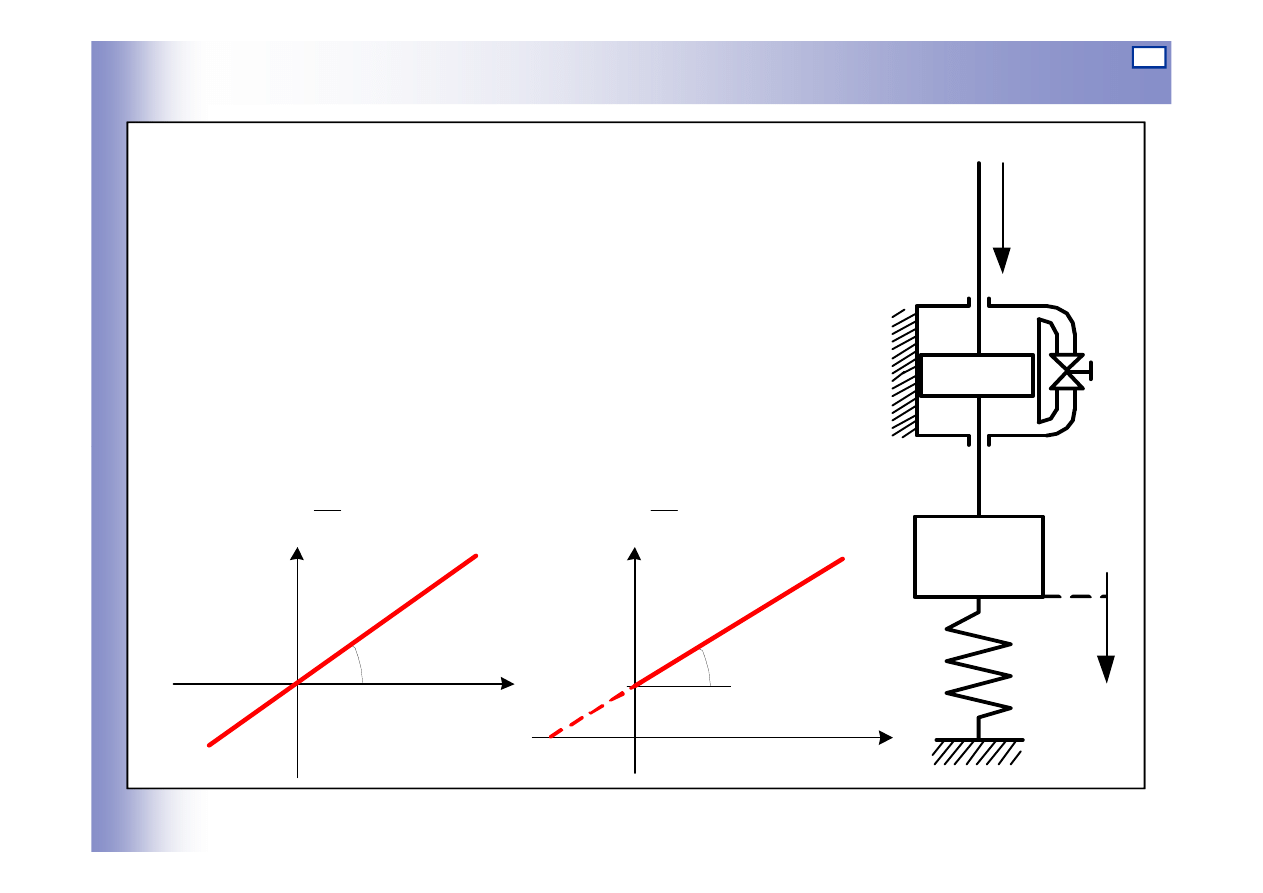
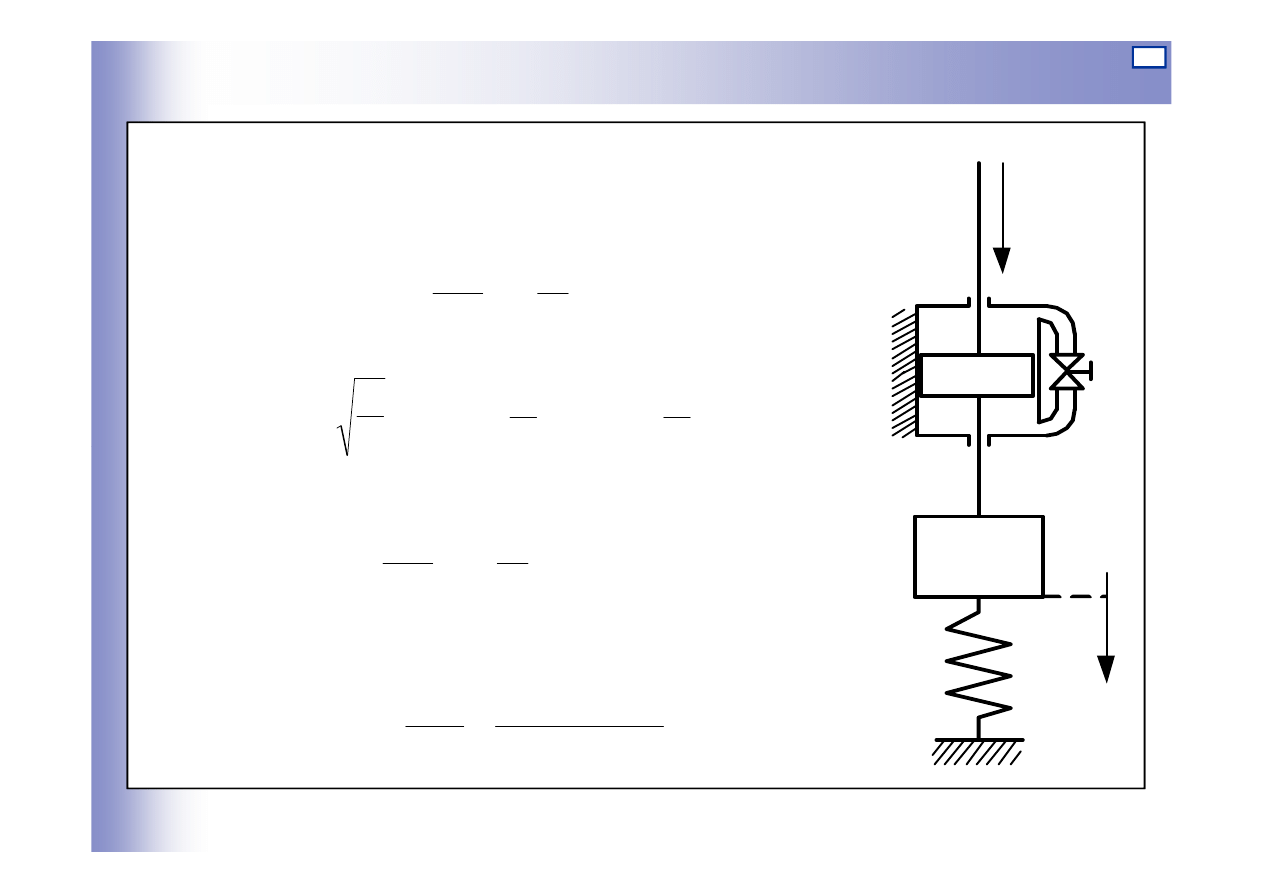
Elementy inercyjne pierwszego rz
ę
du
Równanie ró
ż
niczkowe
k – współczynnik proporcjonalno
ś
ci (wzmocnienie)
T – stała czasowa
Transmitancja
ku
y
dt
dy
T
=
+
Transmitancja
Odpowied
ź
na wymuszenie skokowe
1
)
(
)
(
)
(
+
=
=
Ts
k
s
u
s
y
s
G
)
1
(
)
(
T
t
st
e
ku
t
y
−
−
=
8
Elementy inercyjne pierwszego rz
ę
du
Odpowied
ź
na wymuszenie skokowe
st
u
s
s
u
1
)
(
=
)
1
(
1
)
1
(
)
(
T
s
s
u
T
k
u
Ts
s
k
s
y
st
st
+
=
+
=
)
1
(
)]
(
[
)
(
1
T
t
st
e
T
u
T
k
s
y
L
t
y
−
−
−
=
=
)
1
(
1
)
(
1
1
at
e
a
a
s
s
L
−
−
−
=
+
y
t
ku
st
T
T
0,632ku
st
)
1
(
)]
(
[
)
(
st
e
T
u
T
s
y
L
t
y
−
=
=
)
1
(
)
(
T
t
st
e
ku
t
y
−
−
=
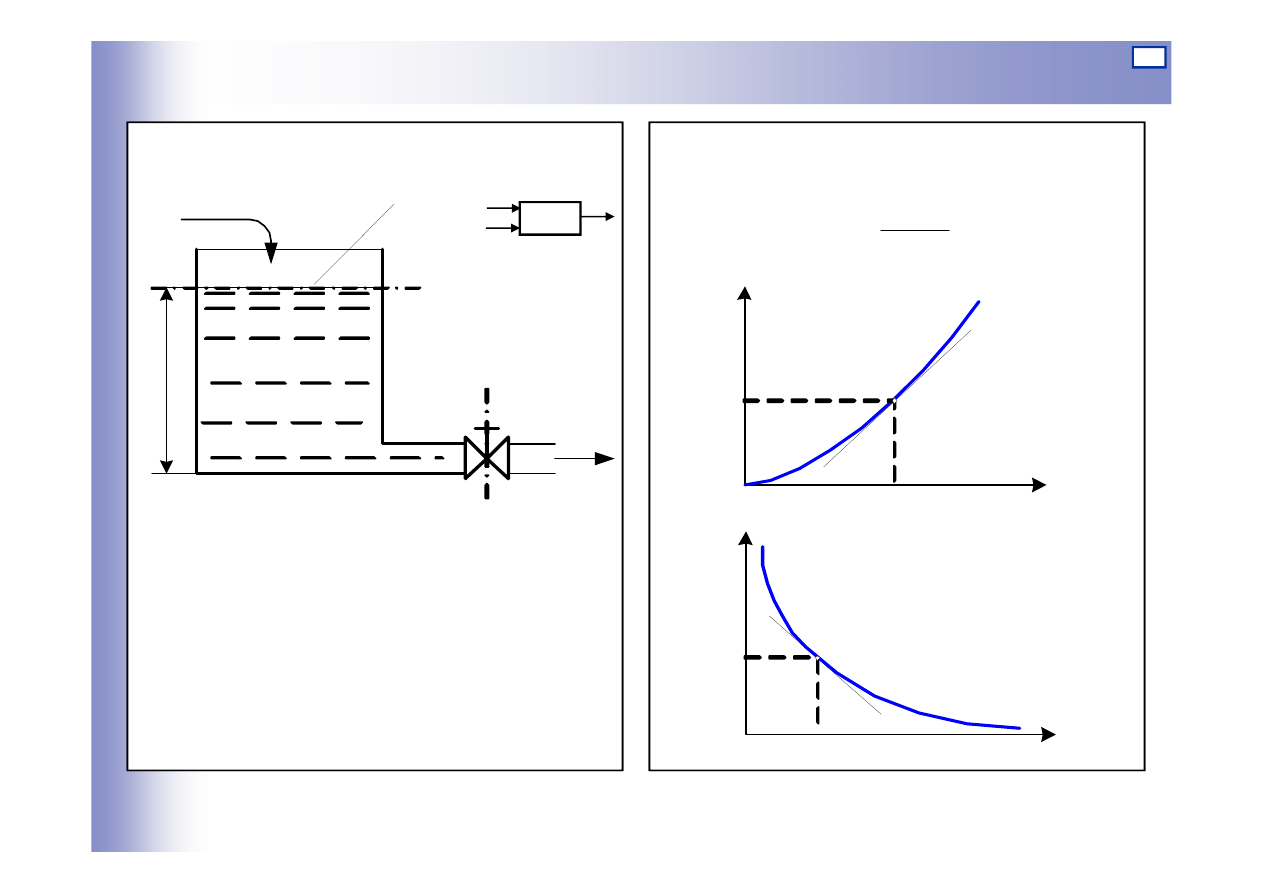
9
Elementy inercyjne pierwszego rz
ę
du
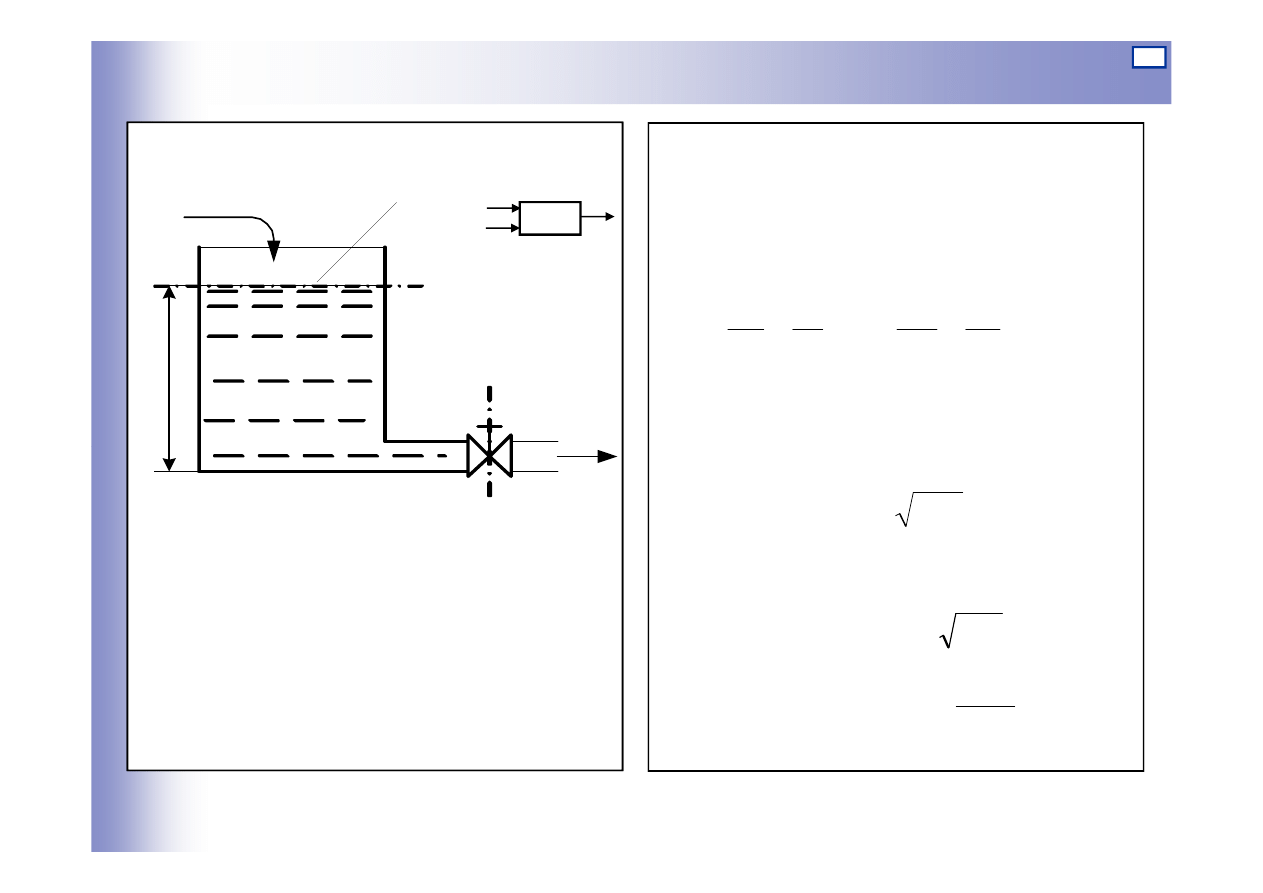
Przykład
Q
1
A
1
Q
2
2
1
h
f
Warunek stanu ustalonego
Z równania Bernoulliego
zakładaj
ą
c v
1
=0 oraz p
1
=p
2
=p
atm
20
10
Q
Q
=
0
2
2
2
2
2
1
2
1
+
+
=
+
+
γ
γ
p
g
v
h
p
g
v
h
Q
1
f
Wej
ś
cia
Q
1
– nat
ęż
enie przepływu cieczy
f – powierzchnia przekroju zaworu
Wyj
ś
cie
h – poziom cieczy w zbiorniku
2
2
1
1
2
atm
otrzymujemy:
Z równania ci
ą
gło
ś
ci:
Otrzymujemy:
gh
v
2
2
=
gh
f
fv
Q
2
2
2
=
=
2
2
2
2gf
Q
h
=
10
Elementy inercyjne pierwszego rz
ę
du
Przykład
Q
1
A
1
Q
2
2
1
h
f
Charakterystyka statyczna
2
0
2
10
0
2gf
Q
h
=
h
0
h
n
f
0
=const
h
Q
1
f
Wej
ś
cia
Q
1
– nat
ęż
enie przepływu cieczy
f – powierzchnia przekroju zaworu
Wyj
ś
cie
h – poziom cieczy w zbiorniku
Q
2
2
Q
1n
Q
10
h
0
h
n
f
n
f
0
Q
10
=const
11
W stanie nieustalonym
linearyzacja dla punktu pracy h
n
, Q
1n
, f
n
Przyrost
∆
Q
2
zast
ę
pujemy ró
ż
niczk
ą
zupełn
ą
Elementy inercyjne pierwszego rz
ę
du
2
1
Q
Q
dt
dh
A
−
=
2
1
Q
Q
dt
h
d
A
∆
−
∆
=
∆
g
Q
Q
∂
∂
gh
f
Q
2
2
=
otrzymujemy
gdzie:
h
h
g
f
f
gh
h
h
Q
f
f
Q
Q
n
n
n
n
n
∆
+
∆
=
∆
∂
∂
+
∆
∂
∂
=
∆
2
2
2
2
2
f
k
Q
k
h
dt
h
d
T
∆
−
∆
=
∆
+
∆
2
1
1
n
n
h
g
f
A
T
2
=
n
n
h
g
f
k
2
1
1
=
n
n
f
h
k
2
2
=
12
Opuszczaj
ą
c znaki
∆
W przypadku, kiedy f
0
=const (f=0)
Elementy inercyjne pierwszego rz
ę
du
f
k
Q
k
h
dt
dh
T
2
1
1
−
=
+
1
1
Q
k
h
dt
dh
T
=
+
h
Q
1
f
kiedy Q
10
=const (Q
1
=0)
gdzie:
n
n
h
g
f
A
T
2
=
n
n
h
g
f
k
2
1
1
=
n
n
f
h
k
2
2
=
dt
f
k
h
dt
dh
T
2
−
=
+
Elementy inercyjne pierwszego rz
ę
du
13
1
1
Q
k
h
dt
dh
T
=
+
f
k
h
dt
dh
T
2
−
=
+
1
)
(
)
(
)
(
1
1
1
+
=
=
Ts
k
s
Q
s
h
s
G
1
)
(
)
(
)
(
2
2
+
−
=
=
Ts
k
s
f
s
h
s
G
f
k
Q
k
h
dt
dh
T
2
1
1
−
=
+
f
0
=const (f=0)
Q
10
=const (Q
1
=0)
+
−
+
=
1
1
)
(
)
(
)
(
)
(
2
1
1
Ts
k
Ts
k
s
f
s
h
s
Q
s
h
h
Q
1
f
14
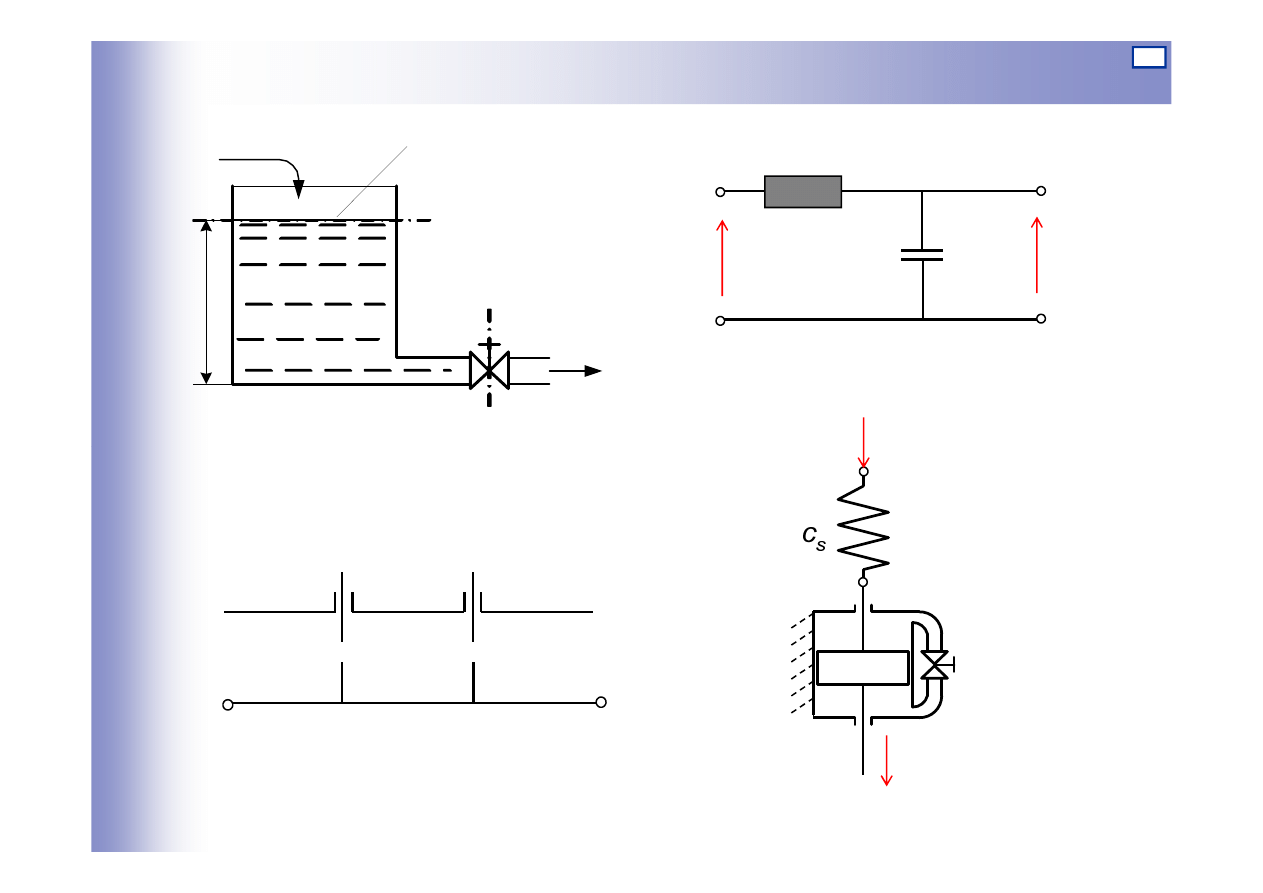
Elementy inercyjne – przykłady
Q
1
A
1
Q
2
2
2
1
h
f
U
1
U
2
R
C
Czwórnik RC
Zbiornik z wypływem swobodnym
u
u=Q
1
y=Q
2
u=u
1
y=u
2
p
1
p
2
p
k
f
1
f
2
Kaskada pneumatyczna
Zbiornik z wypływem swobodnym
y
u
Tłumik hydrauliczny
y=p
k
u
3
=f
1
u
1
=p
1
u
2
=p
2
u
4
=f
2
15
Elementy całkuj
ą
ce
Równanie ró
ż
niczkowe:
po scałkowaniu, przy zerowych warunkach pocz
ą
tkowych:
ku
dt
dy
=
∫
=
t
udt
k
y
Transmitancja:
gdy sygnały jednoimienne:
∫
=
udt
k
y
0
s
k
s
u
s
y
s
G
=
=
)
(
)
(
)
(
Ts
s
u
s
y
s
G
1
)
(
)
(
)
(
=
=
16
Elementy całkuj
ą
ce
Charakterystyka statyczna
we współrz
ę
dnych odchyłek a) i warto
ś
ci absolutnych b)
0
=
u
y
y
0
a)
b)
Odpowied
ź
na wymuszenie skokowe
u
u
0
0
u
n
t
ku
s
y
L
t
y
st
=
=
−
)]
(
[
)
(
1
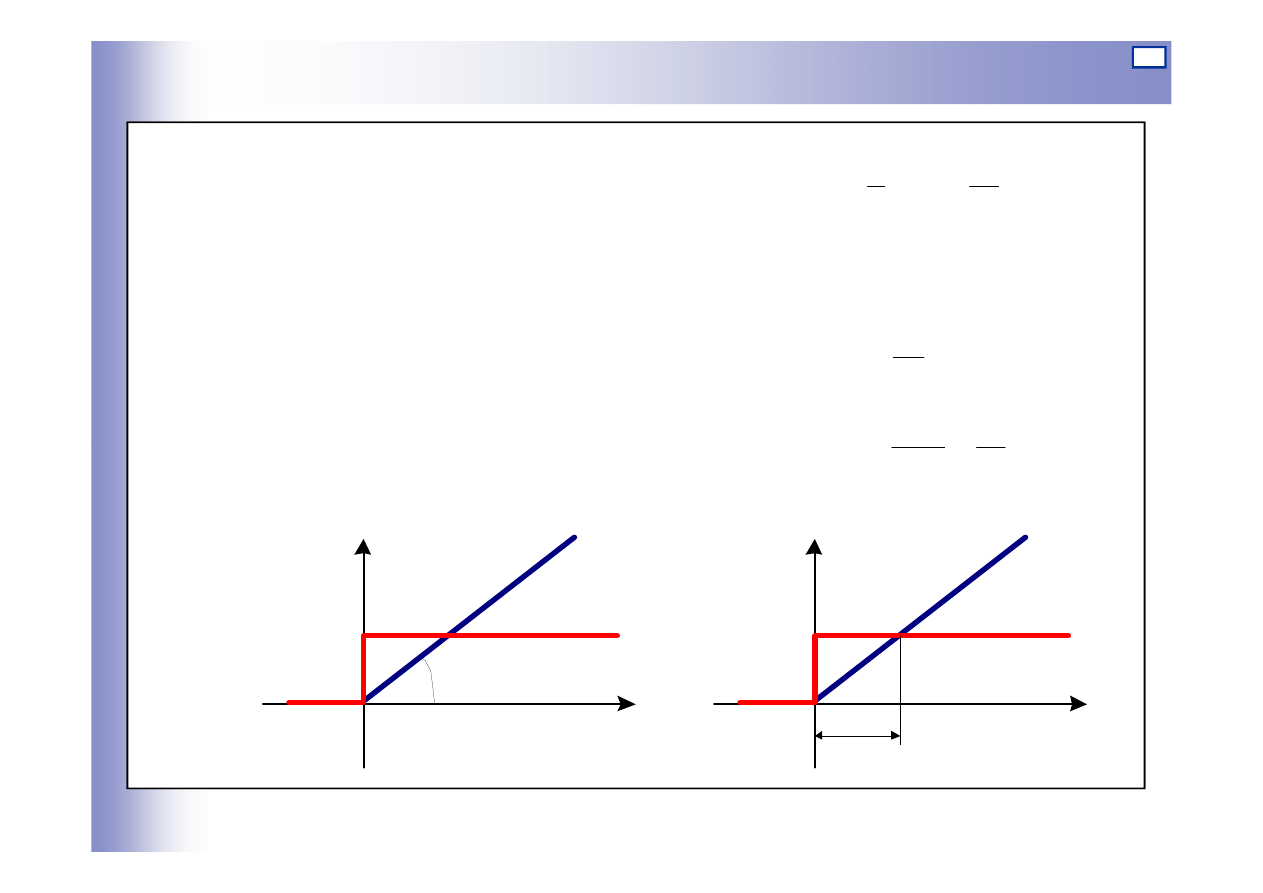
17
Elementy całkuj
ą
ce
Odpowied
ź
na wymuszenie skokowe
kiedy wej
ś
cie i wyj
ś
cie
s
ą
sygnałami jednoimiennymi, to k = 1/T
gdzie T jest stał
ą
czasow
ą
akcji całkuj
ą
cej
– stał
ą
całkowania
st
u
s
k
s
u
s
k
s
y
2
)
(
)
(
=
=
t
ku
s
y
L
t
y
st
=
=
−
)]
(
[
)
(
1
u
dt
dy
T
=
s
y
s
G
1
)
(
)
(
=
=
– stał
ą
całkowania
a)
b)
t
u y
u
st
y(t)
u(t)
arctg ku
st
t
u y
u
st
y(t)
u(t)
T
Ts
s
u
s
G
)
(
)
(
=
=
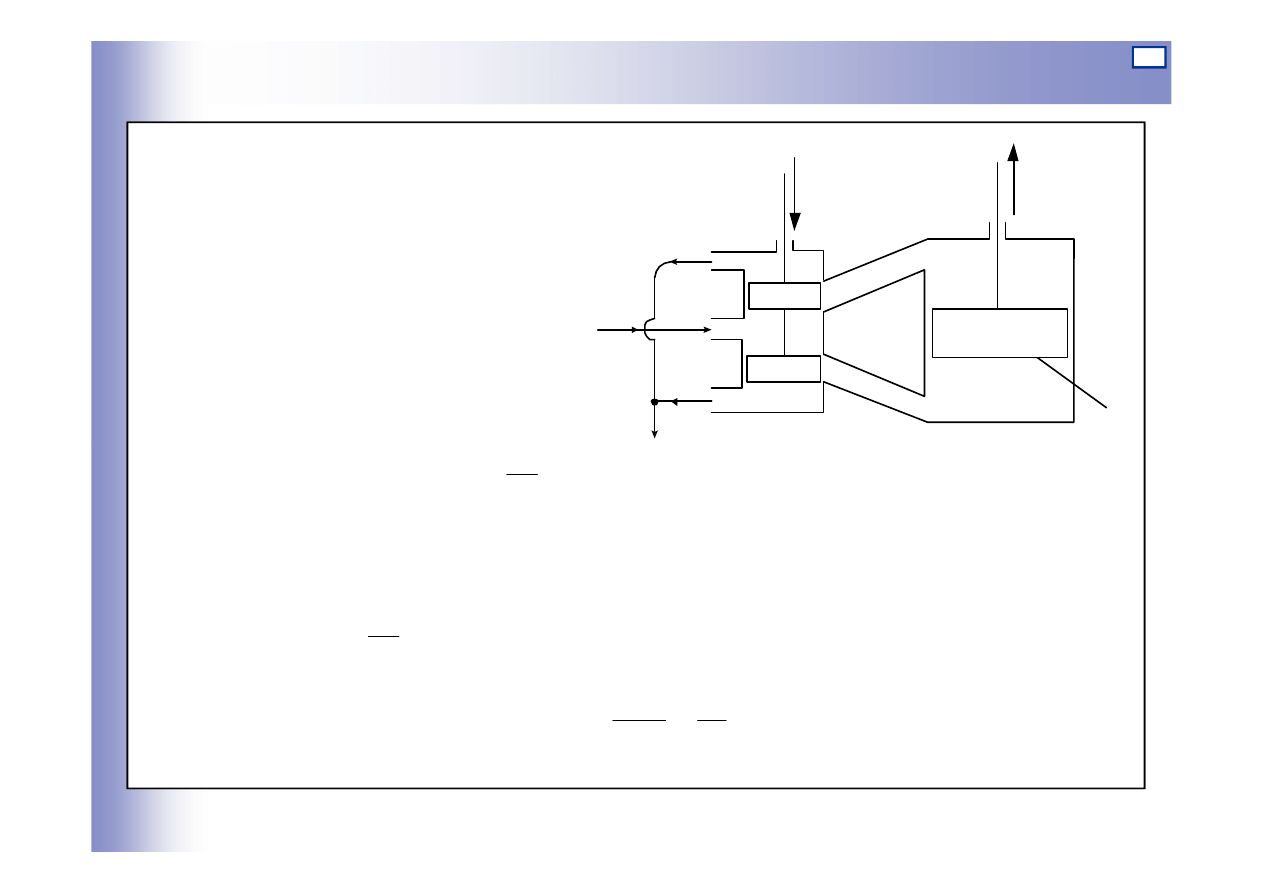
18
Elementy całkuj
ą
ce
Przykład
Zało
ż
enia:
a) stałe p
z
i p
s
b) zerowe obci
ąż
enie siłownika
c) stała pr
ę
dko
ść
v przepływu
medium przez rozdzielacz
dy
y
A
u
p
z
p
s
Stan dynamiczny:
z równania ci
ą
gło
ś
ci:
gdzie ub – przekrój szczeliny
otrzymujemy:
gdzie
dt
dy
A
Q
=
ubv
Q
=
u
dt
dy
T
=
bv
A
T
/
=
Ts
s
u
s
y
s
G
1
)
(
)
(
)
(
=
=
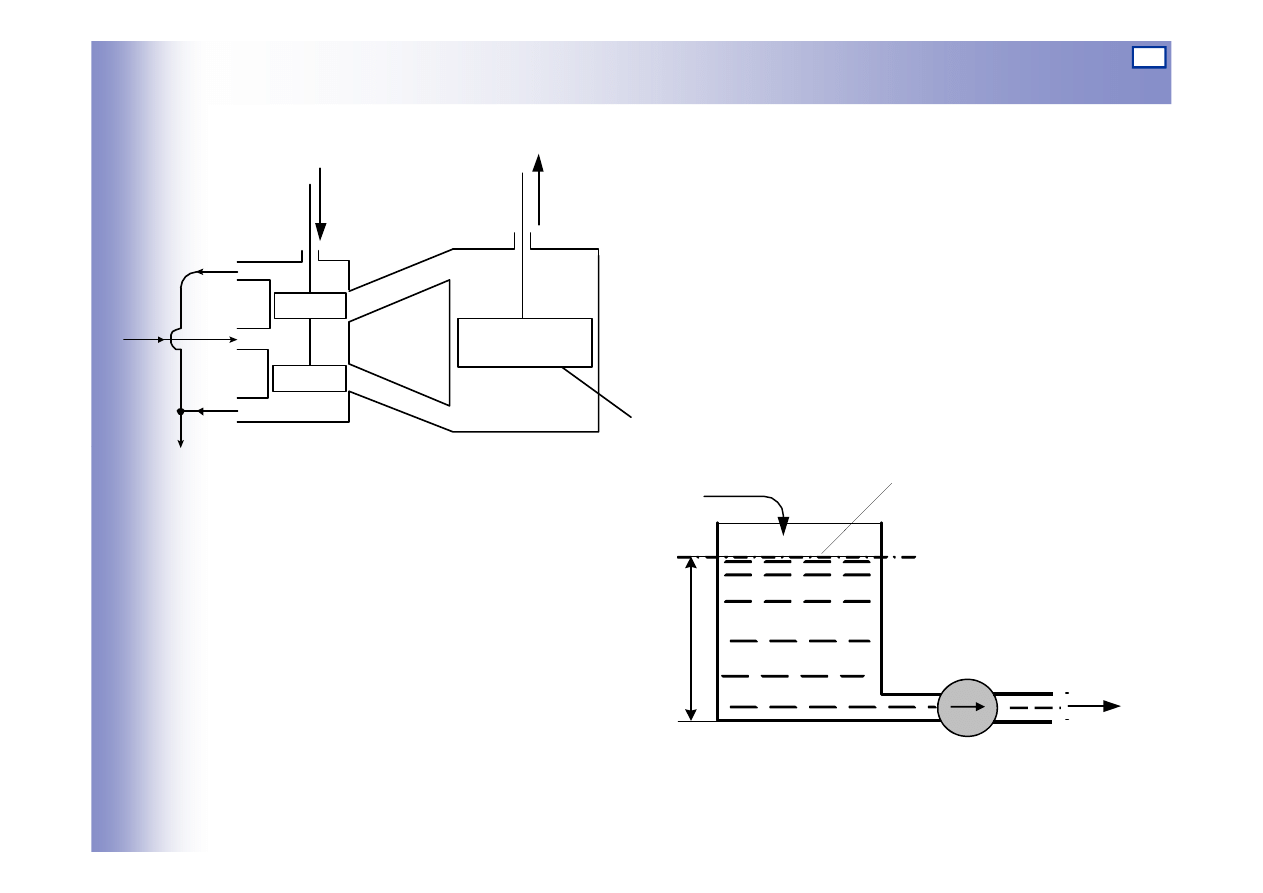
19
Elementy całkuj
ą
ce - przykłady
y
A
u
p
z
p
s
Zbiornik z wymuszonym
poborem cieczy
Zespół siłownik - rozdzielacz
hydrauliczny
Q
1
A
1
1
h
Q
2
y=h
u=Q
2
20
Elementy ró
ż
niczkuj
ą
ce
Równanie ró
ż
niczkowe
k – współczynnik definiowany jako
Transmitancja
dt
du
k
y
=
dt
du
y
k
=
ks
s
u
s
y
s
G
=
=
)
(
)
(
)
(
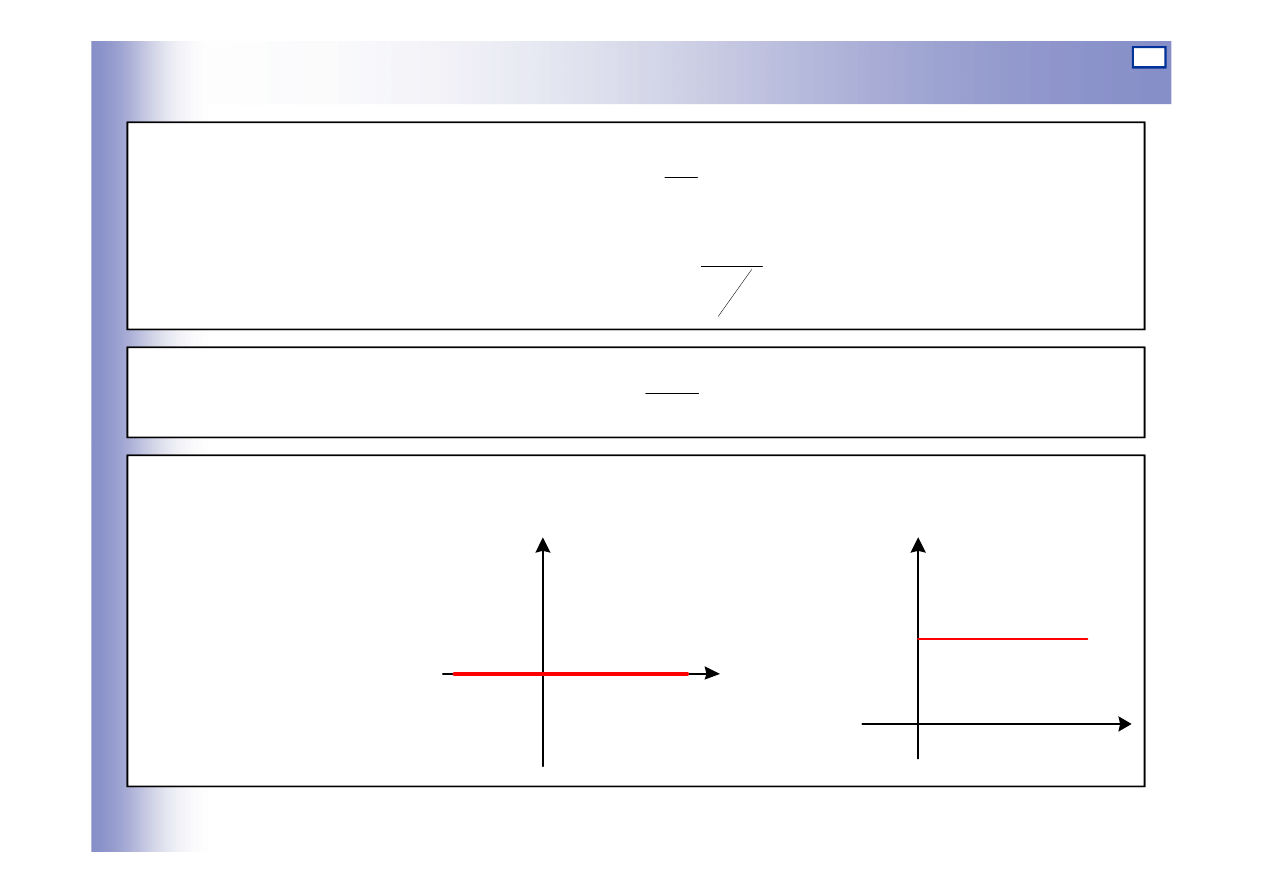
Charakterystyka statyczna
we współrz
ę
dnych:
a) odchyłek
b) warto
ś
ci absolutnych
u
y
u
0
y
0
0
a)
b)
y
n
21
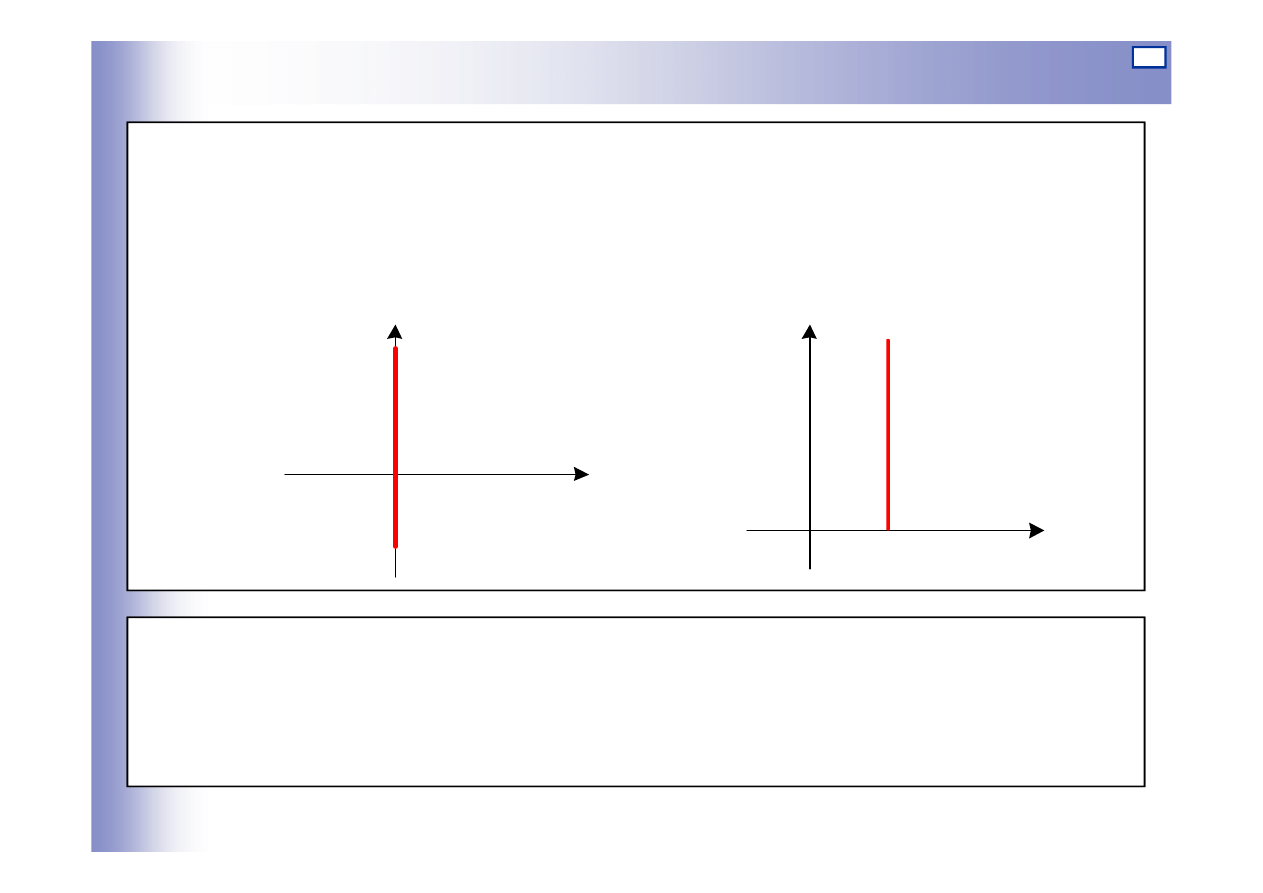
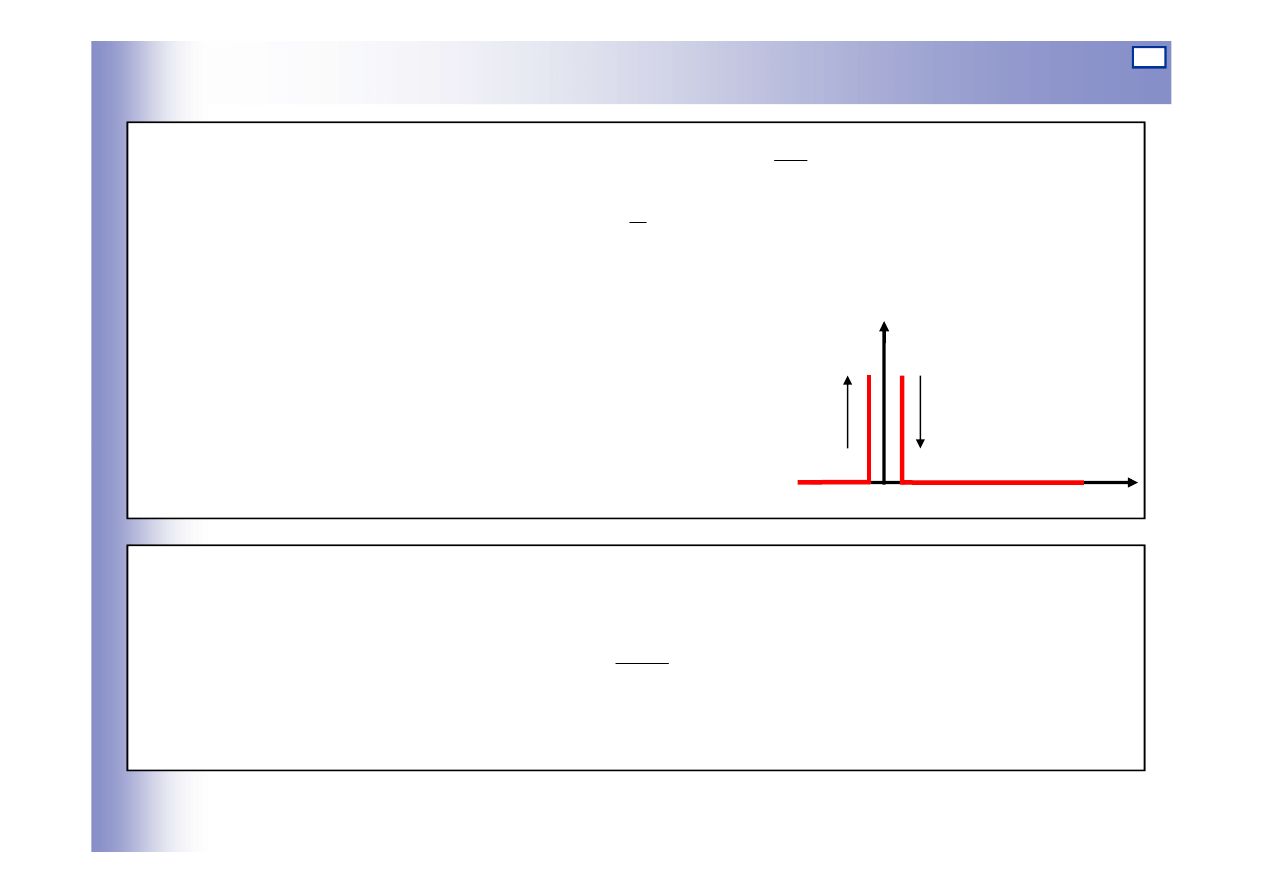
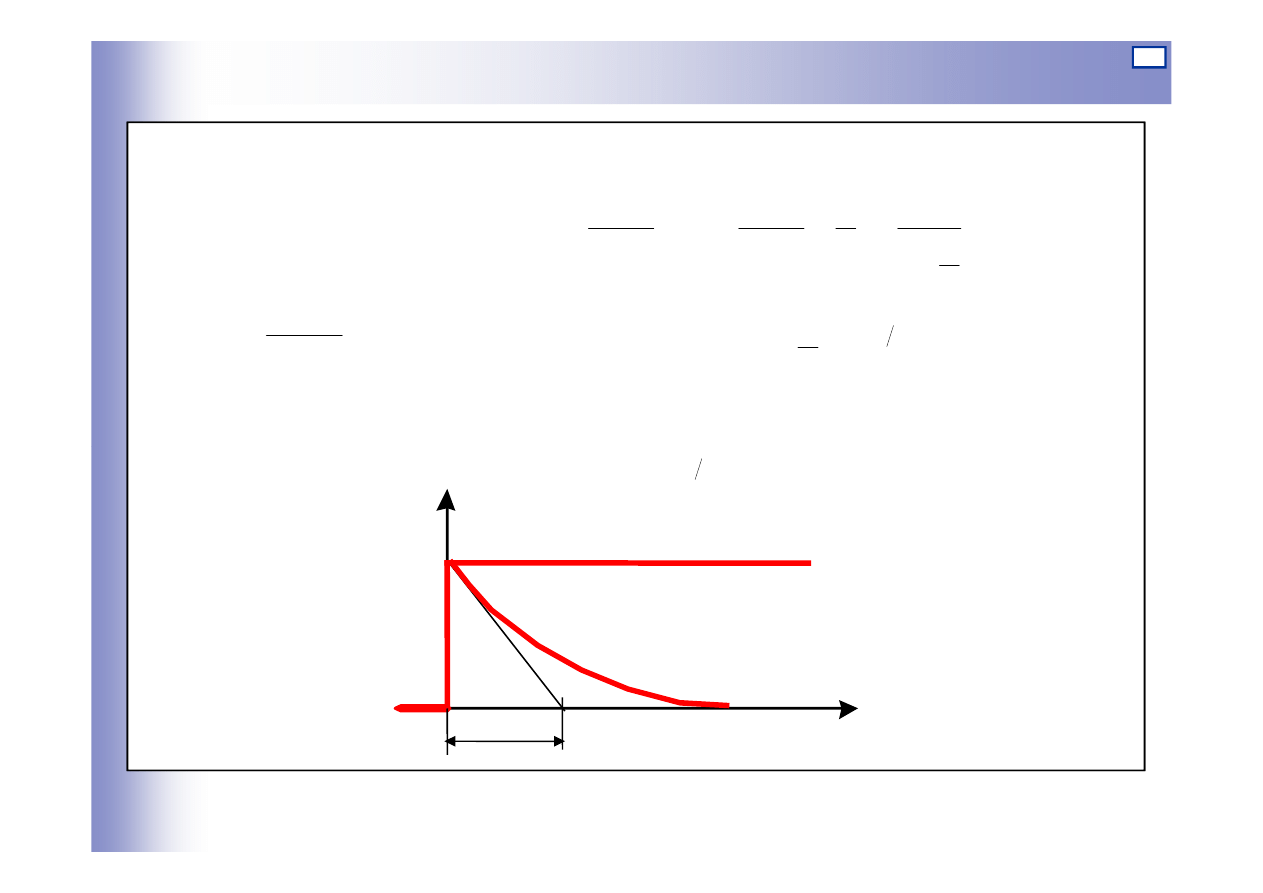
Odpowied
ź
na wymuszenie skokowe
Elementy ró
ż
niczkuj
ą
ce
)
(
)
(
s
ksu
s
y
=
)
(
)]
(
[
)
(
1
t
ku
s
y
L
t
y
st
δ
=
=
−
=
∞
<
=
0
dla
0
dla
0
)
(
t
t
t
y
dt
du
k
y
=
st
u
s
s
u
1
)
(
=
st
ku
s
y
=
)
(
t
y
∞
Kiedy wej
ś
cie i wyj
ś
cie s
ą
sygnałami jednoimiennymi zapisujemy:
gdzie: T jest stał
ą
czasow
ą
akcji ró
ż
niczkuj
ą
cej (stała ró
ż
niczkowania)
>
0
dla
0
t
Ts
s
u
s
y
s
G
=
=
)
(
)
(
)
(
t
0
22
Elementy ró
ż
niczkuj
ą
ce rzeczywiste
Równanie ró
ż
niczkowe
Transmitancja
gdzie:
k – współczynnik proporcjonalno
ś
ci akcji ró
ż
niczkuj
ą
cej
dt
du
k
y
dt
dy
T
=
+
1
)
(
)
(
)
(
+
=
=
Ts
ks
s
u
s
y
s
G
T – stała czasowa cz
ęś
ci inercyjnej
Dla sygnałów jednoimiennych u i y:
Charakterystyka statyczna
jak dla elementów ró
ż
niczkuj
ą
cych idealnych
1
)
(
)
(
)
(
+
=
=
Ts
Ts
s
u
s
y
s
G
23
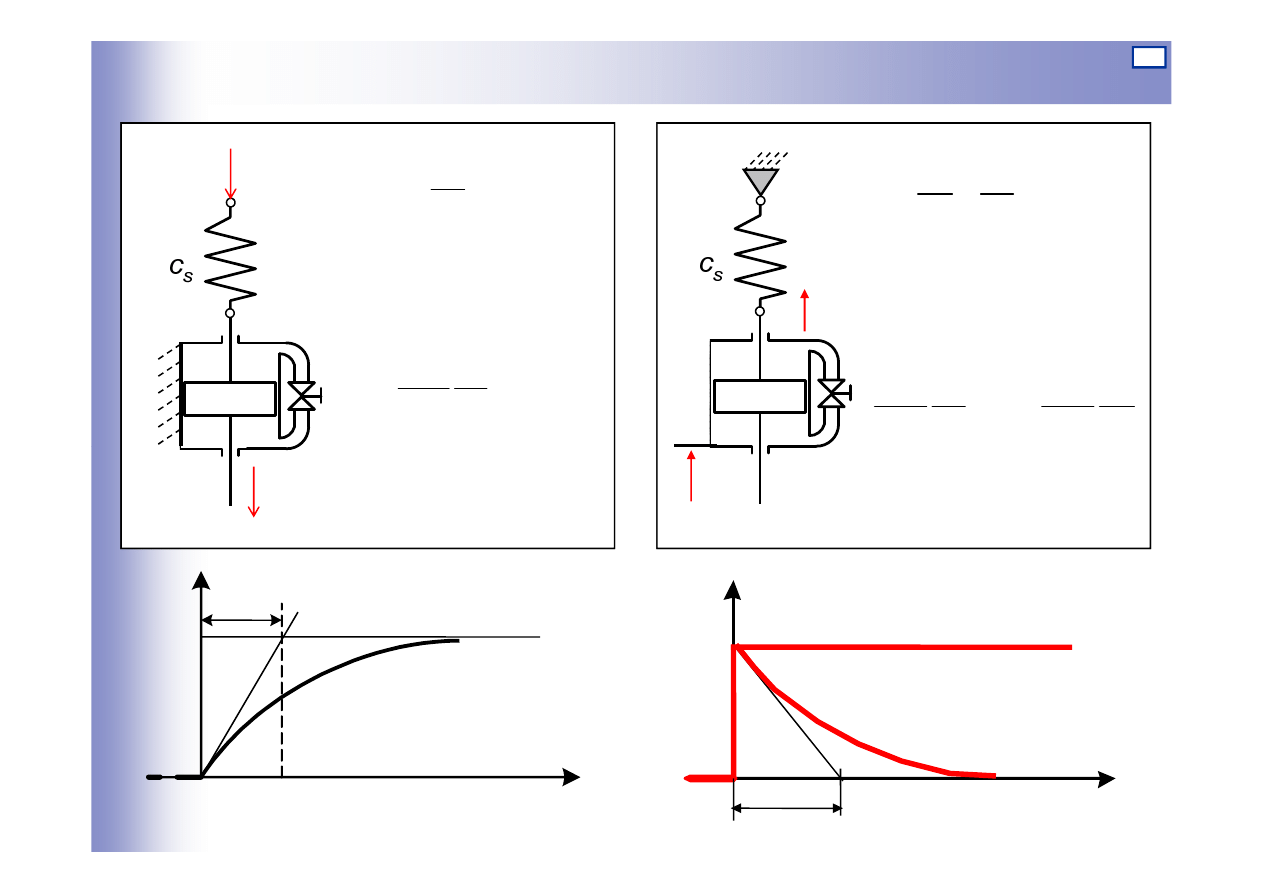
Odpowied
ź
na wymuszenie skokowe:
dla sygnałów jednoimiennych:
Elementy ró
ż
niczkuj
ą
ce rzeczywiste
T
s
u
T
k
Ts
ku
s
u
Ts
ks
s
y
st
st
1
1
1
)
(
1
)
(
+
=
+
=
+
=
T
t
st
e
u
T
k
s
y
L
t
y
−
−
=
=
)]
(
[
)
(
1
at
e
a
s
L
−
−
=
+
)
(
1
1
T
t
st
e
u
t
y
−
=
)
(
y
t
u
st
T
u(t)
y(t)
0
24
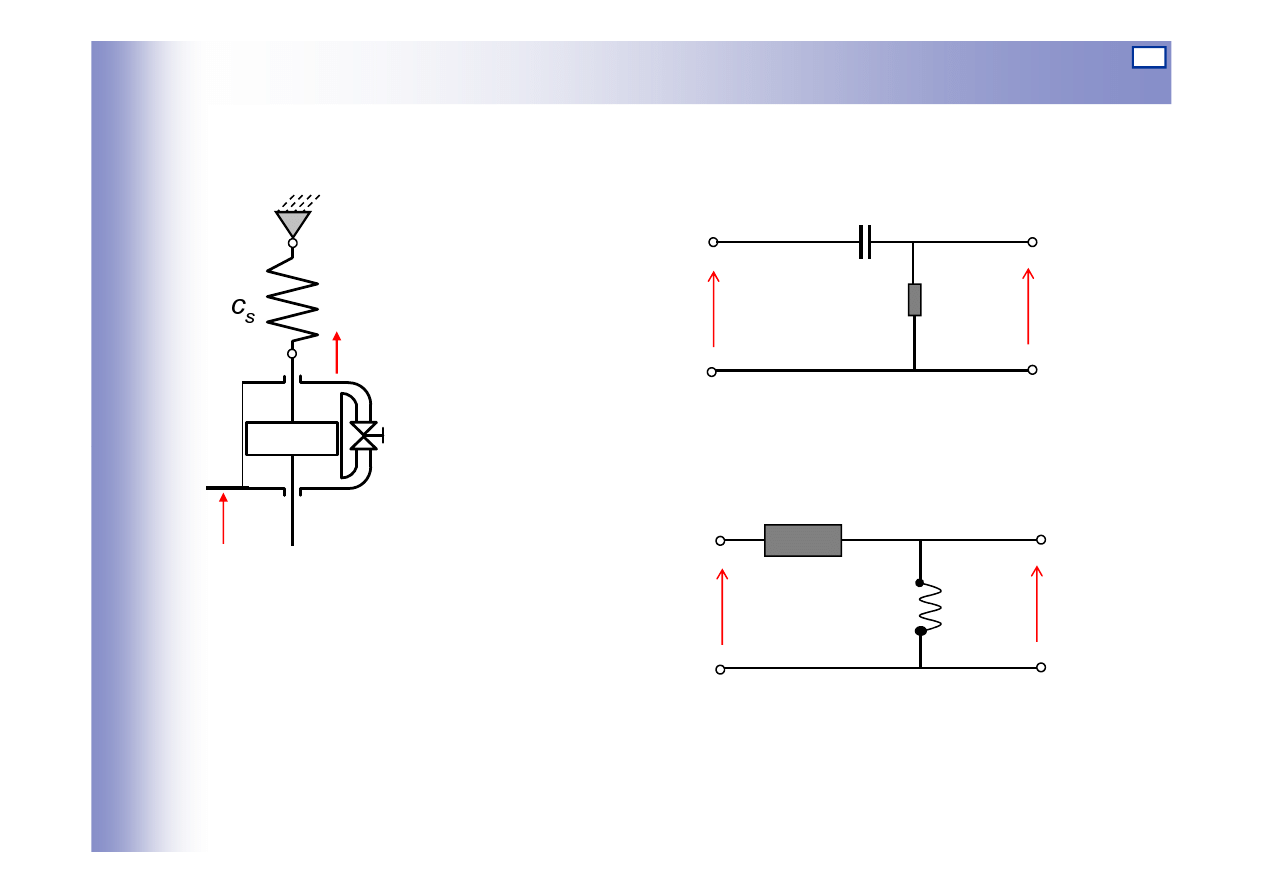
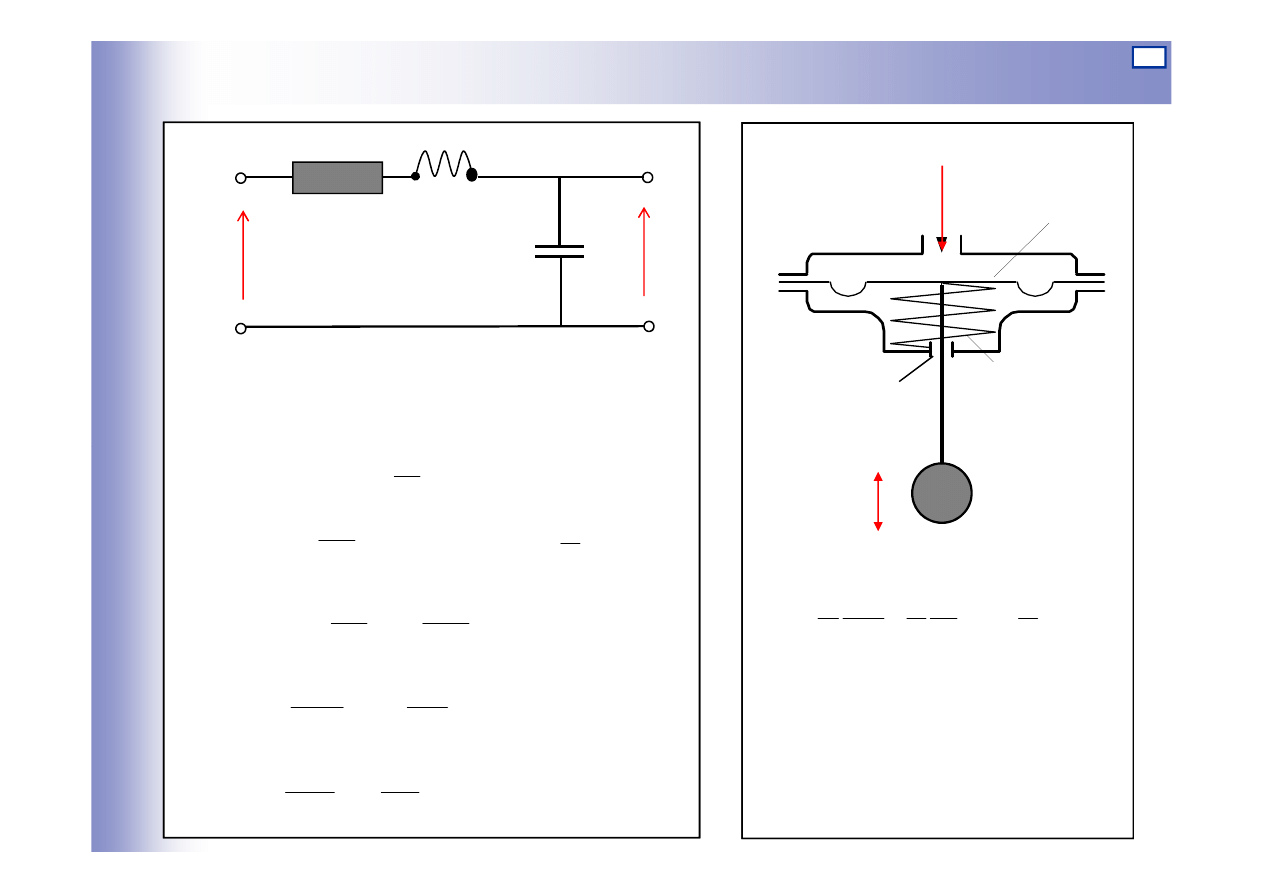
Elementy ró
ż
niczkuj
ą
ce - rzeczywiste
Czwórnik RC
U
1
U
2
R
C
y=u
2
u=u
1
y
Tłumik hydrauliczny
ze spr
ęż
yn
ą
Czwórnik RL
U
1
U
2
R
L
u=u
1
y=u
2
U
25
Zale
ż
no
ść
transmitancja od we-wy
pA
C
y
u
s
∆
=
−
)
(
p
dt
dy
A
∆
=
α
u
u
y
dt
dy
C
A
s
=
+
α
2
p
dt
dy
dt
du
A
∆
=
−
α
pA
yC
s
∆
=
dt
du
C
A
y
dt
dy
C
A
s
s
α
α
2
2
=
+
y
y
s
s
U
t
u
st
T
u(t)
y(t)
0
y
t
u
st
T
26
Elementy oscylacyjne
Równanie ró
ż
niczkowe
Transmitancja:
2
1
2
2
4T
T
<
ku
y
dt
dy
T
dt
y
d
T
=
+
+
2
2
2
2
1
1
)
(
)
(
)
(
2
2
2
1
+
+
=
=
s
T
s
T
k
s
u
s
y
s
G
u
T
k
y
T
dt
dy
T
T
dt
y
d
2
1
2
1
2
1
2
2
2
1
=
+
+
Równanie ró
ż
niczkowe
Transmitancja :
gdzie: k – współczynnik proporcjonalno
ś
ci
– pulsacja oscylacji własnych
– zredukowany (wzgl
ę
dny) współczynnik tłumienia
u
k
y
dt
dy
dt
y
d
2
0
2
0
0
2
2
2
ω
ω
ζω
=
+
+
2
0
0
2
2
0
2
)
(
)
(
)
(
ω
ζω
ω
+
+
=
=
s
s
k
s
u
s
y
s
G
1
2
<
ζ
1
0
/
1
T
=
ω
1
2
2
/
T
T
=
ζ
27
Charakterystyka statyczna
we współrz
ę
dnych:
a) odchyłek
Elementy oscylacyjne
ku
y
=
u
y
a)
b) warto
ś
ci absolutnych
C
ku
y
+
=
0
0
u
0
y
0
c
0
b)
28
Odpowied
ź
na wymuszenie skokowe
pierwiastki wielomianu N(s):
Elementy oscylacyjne
+
+
=
+
+
=
=
−
−
−
)
1
(
1
)
1
(
)
(
)
(
)
(
2
2
2
1
1
2
2
2
1
1
1
s
T
s
T
s
L
ku
u
s
T
s
T
s
k
L
u
s
sN
s
M
L
t
y
st
st
st
−
−
=
−
±
−
=
1
1
4
2
2
2
2
1
2
2
2
2
,
1
T
T
T
T
T
s
m
lub:
lub
to
odpowied
ź
jest oscylacyjna gdy:
lub
−
−
=
=
1
2
2
2
1
2
1
2
1
2
1
1
2
2
2
,
1
T
T
T
T
s
m
1
0
1
T
=
ω
1
2
2T
T
=
ζ
)
1
(
2
0
2
,
1
−
−
=
ζ
ζ
ω
m
s
2
1
2
2
4T
T
<
1
2
<
ζ
29
Odpowied
ź
na wymuszenie skokowe
zapisuj
ą
c
lub
otrzymujemy
Elementy oscylacyjne
−
−
=
2
1
2
1
2
1
2
,
1
2
1
2
1
T
T
j
T
T
T
s
m
)
1
(
2
0
2
,
1
ζ
ζ
ω
−
−
=
j
s
m
1
1
Stosuj
ą
c wzory Eulera
mo
ż
na uzyska
ć
:
gdzie:
−
+
−
+
=
t
s
t
s
st
e
s
s
s
T
e
s
s
s
T
ku
t
y
2
1
)
(
1
)
(
1
1
)
(
1
2
2
2
1
2
1
1
2
1
+
−
−
−
=
−
)
1
sin(
1
1
)
(
2
0
2
1
0
ϕ
ζ
ω
ζ
ζω
t
e
e
ku
t
y
t
s
t
st
ζ
ζ
ζ
ϕ
arccos
1
2
=
−
=
arctg
)
sin
(cos
v
j
v
e
e
u
jv
u
+
=
+
Elementy oscylacyjne
30
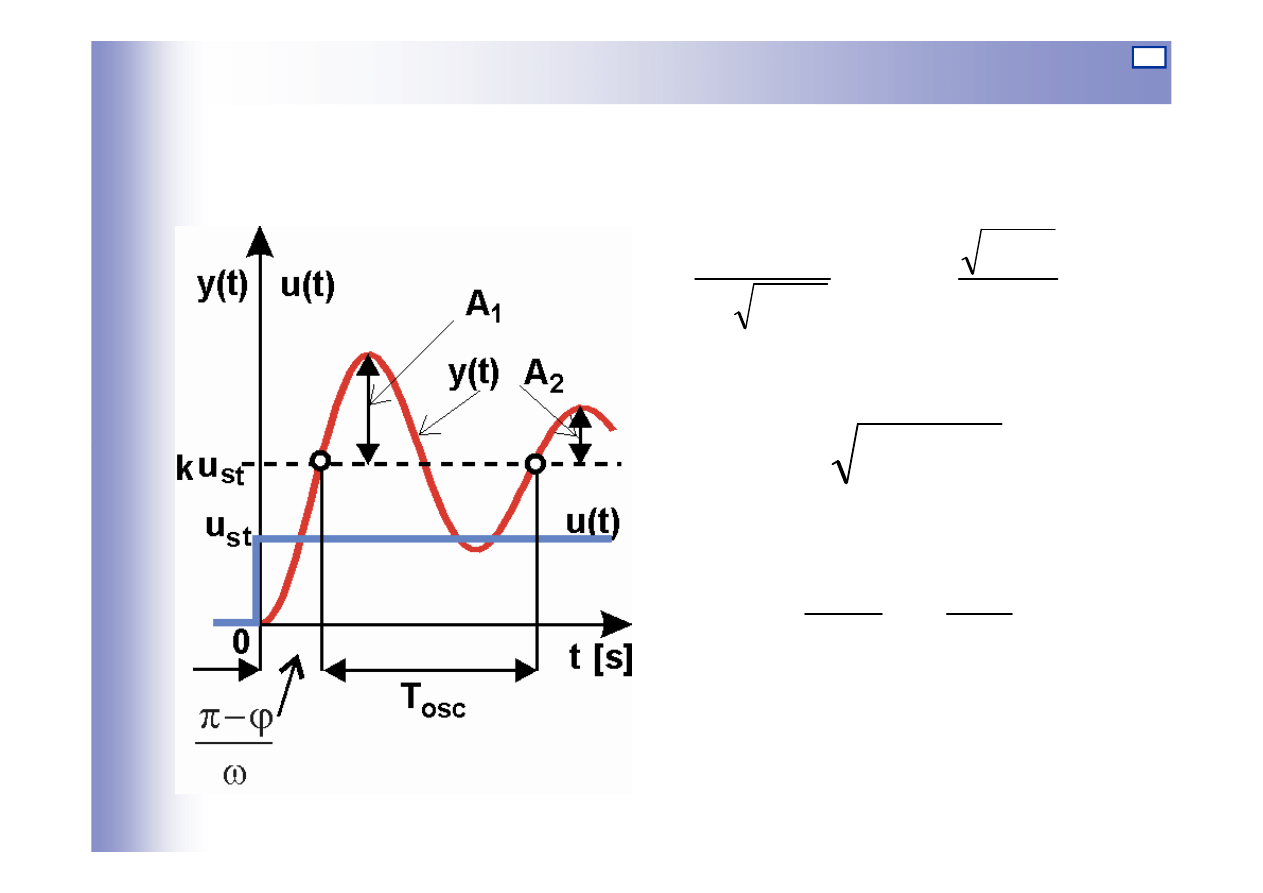
2
2
;
α
+
ω
=
ω
k>1
1
0
〈
ξ
〈
;
ξ
ξ
−
=
ϕ
ξ
−
ω
π
=
2
2
0
osc
1
tg
;
1
2
T
,
A
A
ln
T
1
2
1
osc
=
α
o
2
2
o
/
;
ω
α
=
ξ
α
+
ω
=
ω
31
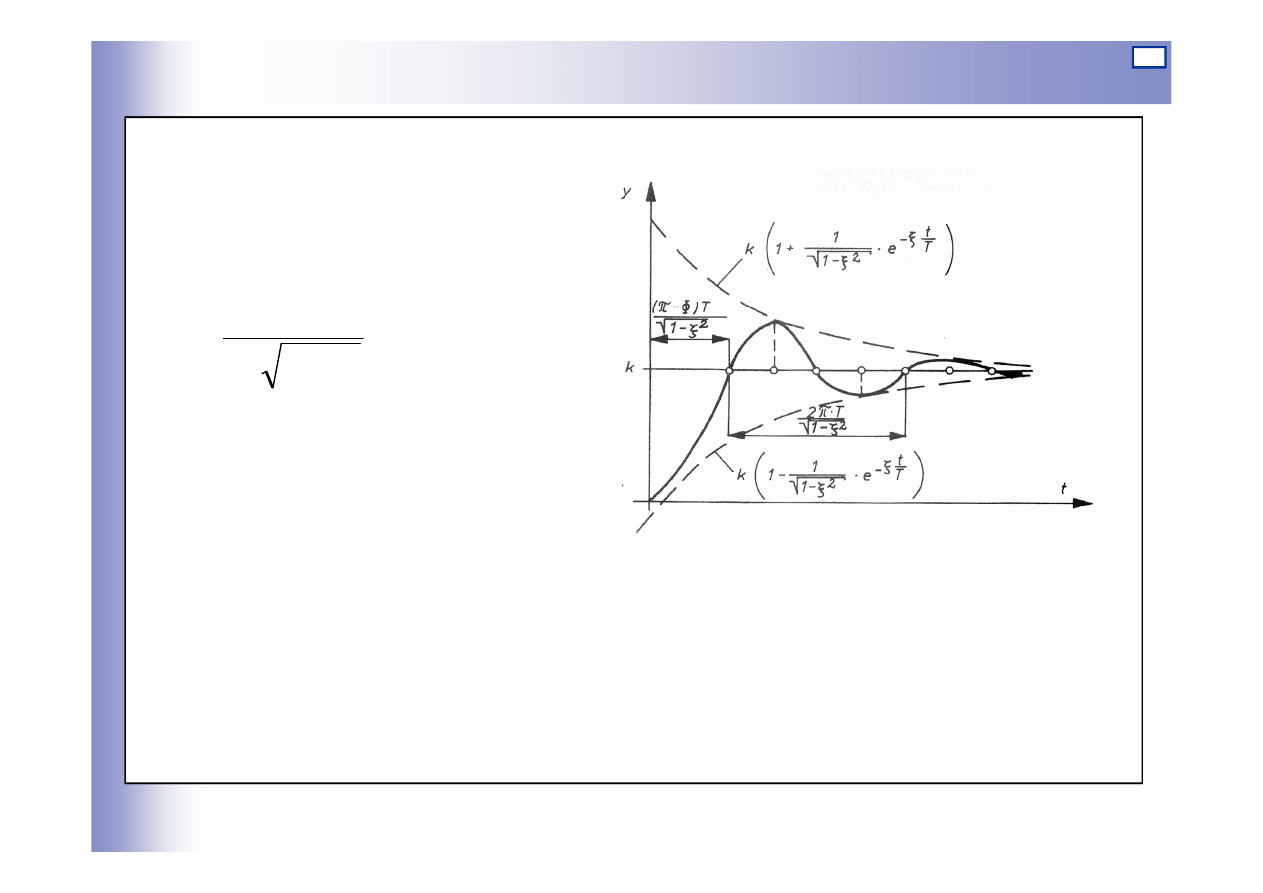
Odpowied
ź
na wymuszenie skokowe
składowa stała:
okres gasn
ą
cej sinusoidy:
Elementy oscylacyjne
st
ku
2
0
1
2
ζ
ω
π
−
1
T
T
≡
dla
ζ
= 0 (T
2
= 0) wyst
ę
puj
ą
drgania zachowawcze (nie tłumione)
o pulsacji
ω
0
, wtedy:
]
cos
1
[
)
(
)]
90
sin(
1
[
)
(
0
0
t
ku
t
y
t
ku
t
y
st
st
ω
ω
−
=
+
−
=
o
Elementy oscylacyjne
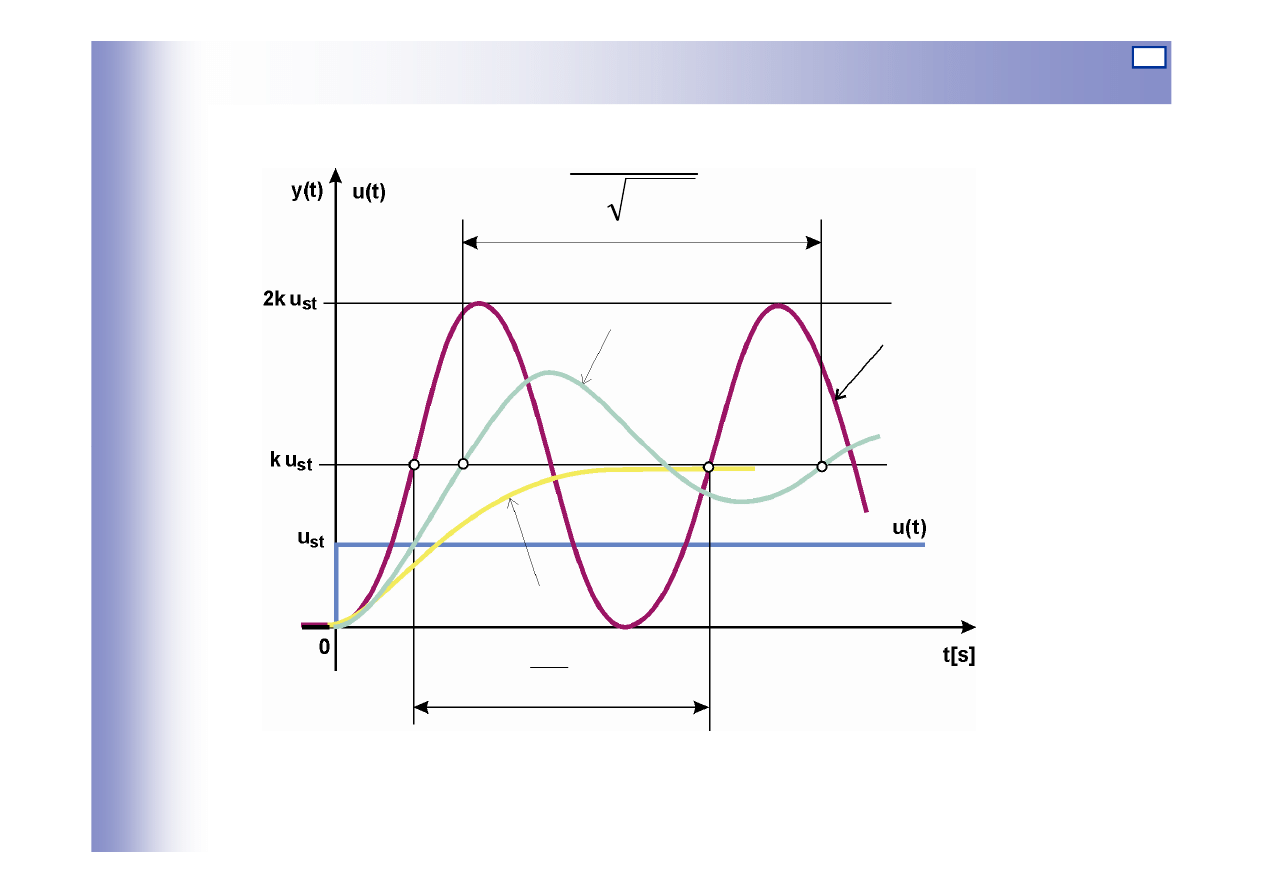
32
2
0
1
2
ξ
−
ω
π
1
0 〈
ξ
〈
0
=
ξ
0
2
ω
π
1
≥
ξ
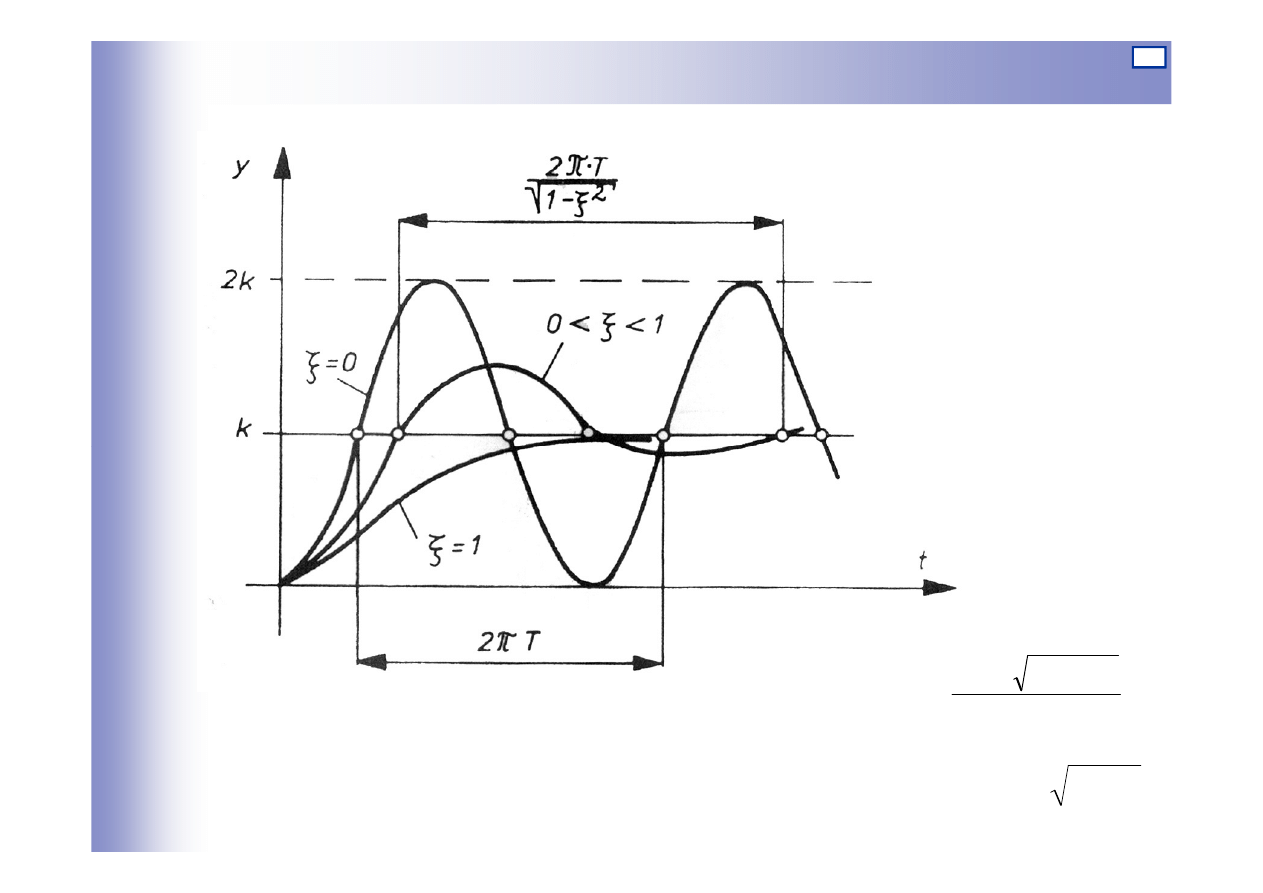
33
Elementy oscylacyjne
1
T
T
≡
2
1
2
1
2
2
2
2
,
1
2
4
T
T
T
T
s
−
±
−
=
)
1
(
2
0
2
,
1
−
−
=
ζ
ζ
ω
m
s
2
1
2
2
4T
T
=
1
2
=
ζ
34
Elementy oscylacyjne
Przykład
siła F – sygnał wej
ś
ciowy
przesuni
ę
cie y – sygnał wyj
ś
ciowy
W stanie ustalonym:
F
c
t
0
0
y
c
mg
F
s
=
+
m
y
c
s
)
(
1
0
0
mg
F
c
y
s
+
=
F
y
a)
arctg 1/c
s
arctg 1/c
s
F
0
y
0
0
b)
- mg
F
c
y
s
1
=
35
Elementy oscylacyjne
Przykład
równanie równowagi
je
ż
eli:
F
c
t
y
c
dt
dy
c
dt
y
d
m
F
s
t
+
+
=
2
2
s
c
m
T
=
1
s
t
c
c
T
=
2
s
c
k
1
=
to:
st
ą
d transmitancja:
m
y
c
s
s
c
s
c
s
c
kF
y
dt
dy
T
dt
y
d
T
=
+
+
2
2
2
2
1
1
)
(
)
(
)
(
2
2
2
1
+
+
=
=
s
T
s
T
k
s
F
s
y
s
G
36
Elementy oscylacyjne
di
L
U
1
U
2
R
C
Czwórnik RLC
p
A
c
f)
c
u=p
B
2
1
u
dt
di
L
Ri
u
+
+
=
∫
∝
−
=
t
idt
C
u
1
2
dt
du
C
i
2
=
1
2
2
2
2
2
u
u
dt
du
RC
dt
u
d
LC
=
+
+
2
2
2
2
2
1
u
dt
u
d
LC
dt
du
RC
u
+
+
=
1
2
2
2
2
2
2
2
1
u
u
dt
du
T
dt
u
d
T
=
+
+
m
y
p
c
A
y
dt
dy
c
B
dt
y
d
c
m
=
+
+
2
2
37
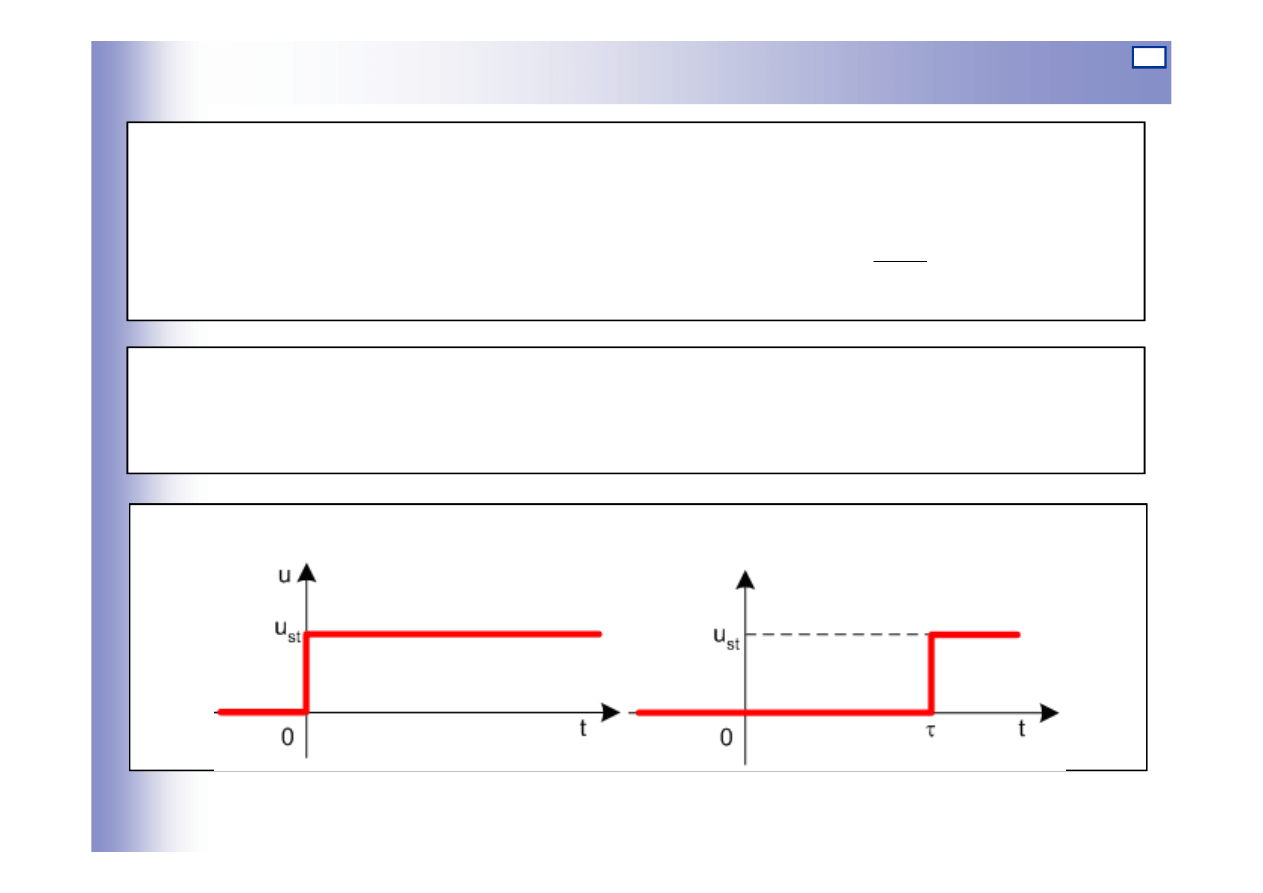
Elementy opó
ź
niaj
ą
ce
Równanie elementu opó
ź
niaj
ą
cego:
Sk
ą
d wynika transmitancja:
)
(
)
(
τ
−
=
t
u
t
y
s
e
s
u
s
y
s
G
τ
−
=
=
)
(
)
(
)
(
Charakterystyka statyczna
lub
u
y
=
0
0
u
y
=
lub
u
y
=
0
0
u
y
=
Odpowied
ź
na wymuszenie skokowe:
y(t)
38
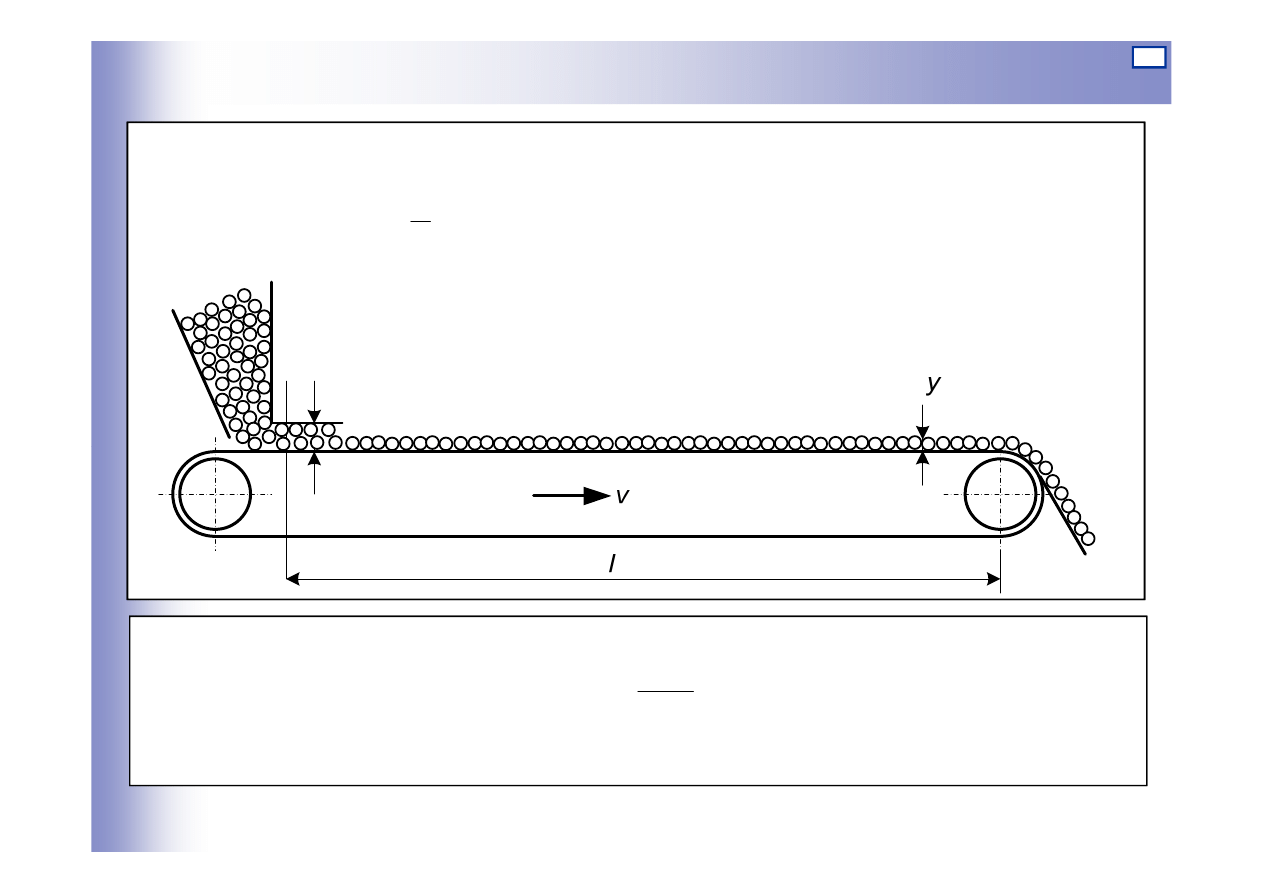
Elementy opó
ź
niaj
ą
ce
Przykład 1. Podajnik ta
ś
mowy
Opó
ź
nienie:
gdzie: l – odległo
ść
[m]
v – pr
ę
dko
ść
ta
ś
my [m/s]
v
l
τ
=
u
Transmitancja
τ
s
e
u(s)
y(s)
G(s)
−
=
=
39
Elementy opó
ź
niaj
ą
ce
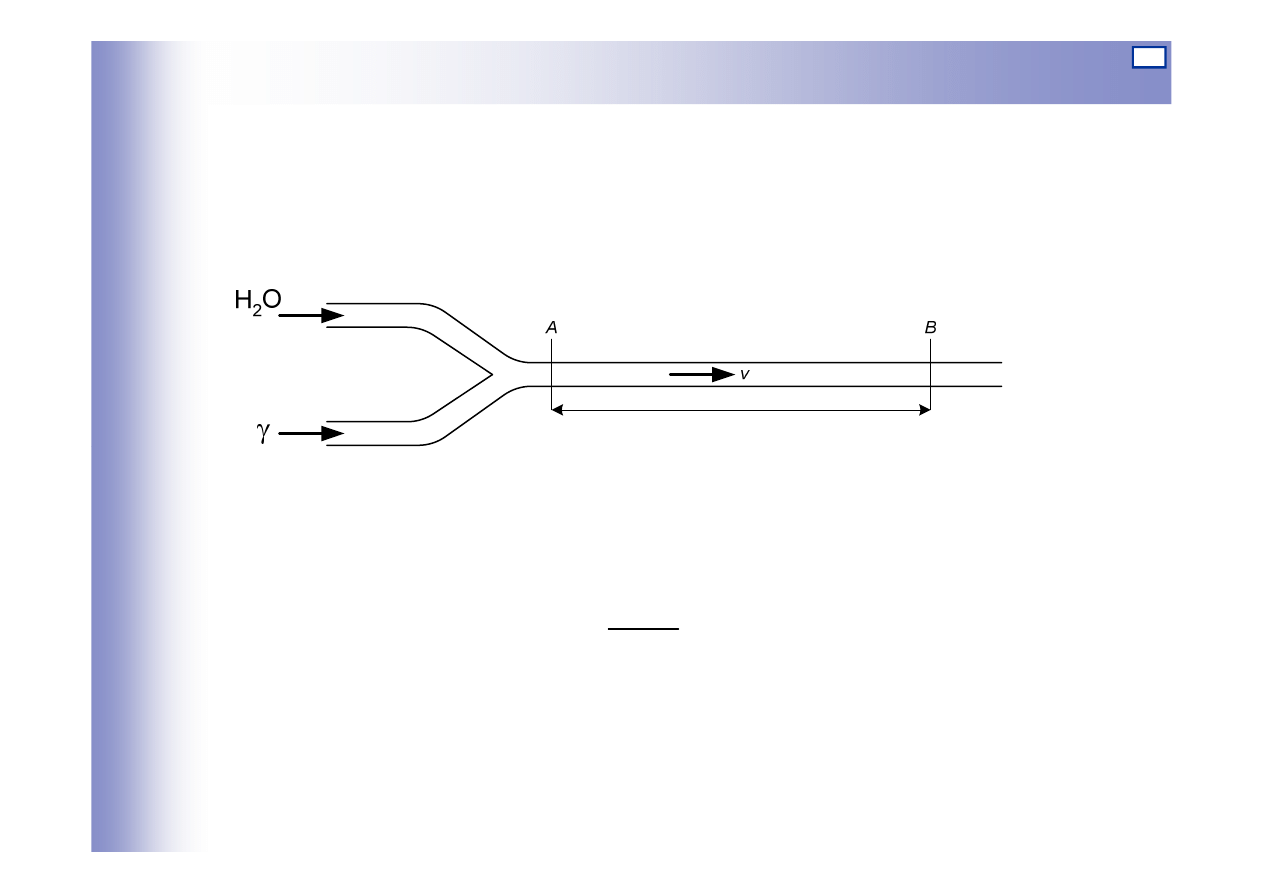
Schemat elementu podano na rysunku poni
ż
ej. Sygnałem wej
ś
ciowym
jest st
ęż
enie substancji
γ
w przekroju A, sygnałem wyj
ś
ciowym –
st
ęż
enie substancji w przekroju B ruroci
ą
gu.
l
Przy zało
ż
eniu,
ż
e nast
ę
puje dokładne wymieszanie substancji i w
danym przekroju jej st
ęż
enie jest jednakowe, otrzymamy:
gdzie: CA – st
ęż
enie substancji
γ
w przekroju A,
CB
–
st
ęż
enie substancji
γ
w przekroju B,
τ
=l/v
–
op
óź
nienie
s
A
B
e
s
C
s
C
s
G
τ
−
=
=
)
(
)
(
)
(
l
Wyszukiwarka
Podobne podstrony:
PA3 podstawowe elementy liniowe [tryb zgodności]
2 Podstawy rachunku współrzędnych [tryb zgodności]
podstawowe informacje o ZTPO tryb zgodności
Podstawy zarz dzania Przedmiot i funkcje dyscypliny Podstawy zarz dzania tryb zgodno ci
PA3 podst elementy liniowe
Podstawy Logistyki wyklad 1 i 2 [tryb zgodno
Podstawowe elementy liniowe
03 Podstawowe elementy linioweid 4
2 Podstawy rachunku współrzędnych [tryb zgodności]
Modelowanie i badanie podstawowych elementów liniowych automatyki – symulacja
wykład 7i8 4h podstawy zarządzania m jablonski [tryb zgodności]
Podstawowe elementy liniowe
03 Podstawowe elementy liniowe
wykład 1i2 4h podstawy zarządzania m jablonski [tryb zgodności]
PA3 podst elementy liniowe
więcej podobnych podstron