
1
WYKŁAD 16
STRUKTURY MASZYN
Z MAGNESAMI TRWAŁYMI
16.1. Topologia budowy przetworników elektromechanicznych.
Wymiana energii w przetworniku z magnesami trwałymi zachodzi poprzez interakcję pól
magnetycznych wytworzonych przez magnesy oraz wielofazowe uzwojenie wiodące prąd
przemienny. W maszynach starszego typu magnesy były montowane na stojanie, a
wielocewkowe uzwojenie wirnika zasilano napięciem stałym za pośrednictwem komutatora.
Ze względu na prostotę technologiczną i niskie koszty wytwarzania to rozwiązanie nadal
często jest spotykane, na przykład w mikromaszynach napędzających sprzęt AGD oraz
elektronarzędzia. Złą stroną takiego rozwiązania jest obecność szczotek w obwodzie
zasilającym i związane z tym kłopoty w eksploatacji. Wady tej są pozbawione maszyny, w
których magnesy są umiejscowione na części ruchomej, a uzwojenie stojana, najczęściej
trójfazowe, jest zasilane z sieci prądu przemiennego; zazwyczaj za pośrednictwem
przekształtnika. Dla serwomechanizmów o ograniczonym zakresie przemieszczeń jest
możliwe zasilanie także części ruchomej, bez pośrednictwa szczotek.
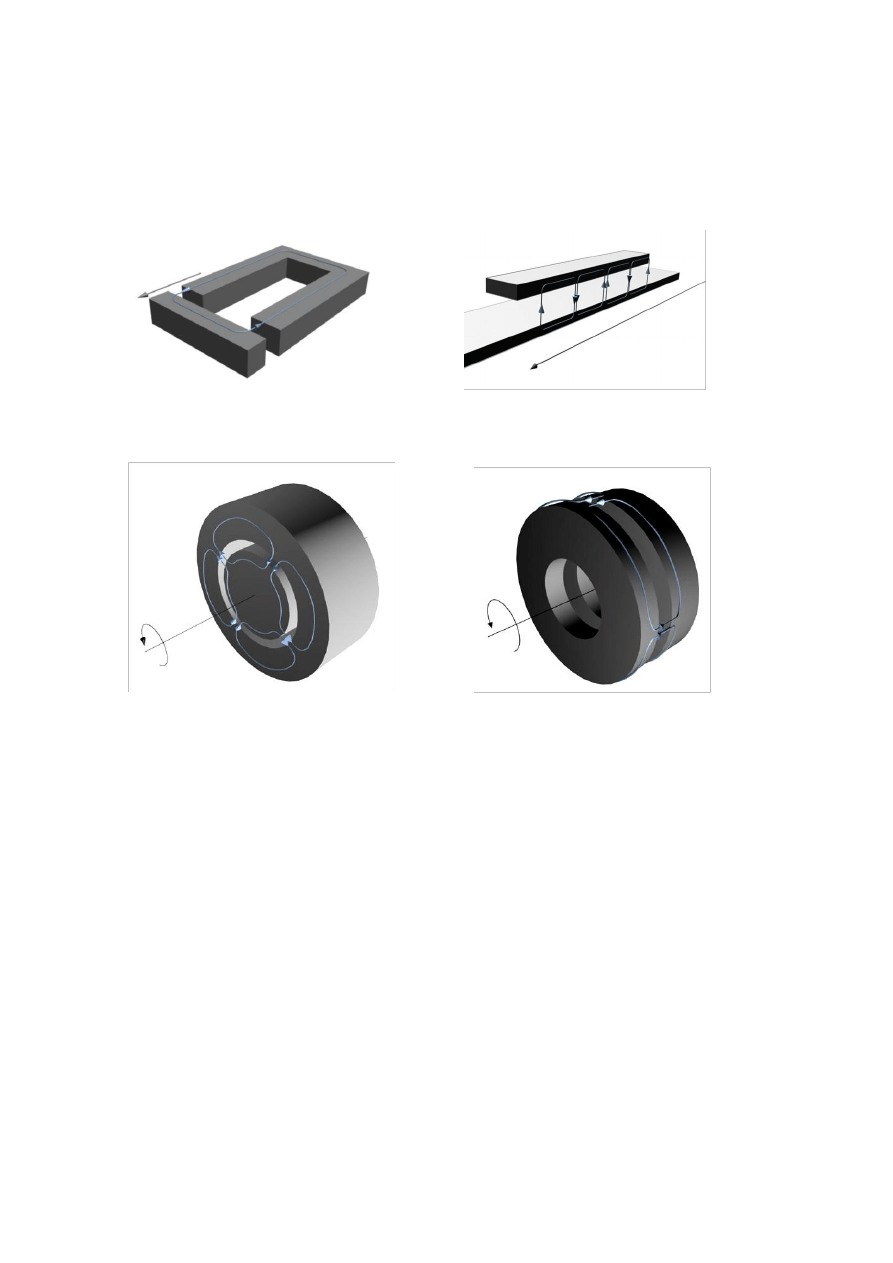
Formalnym wyróżnikiem poszczególnych konstrukcji przetworników jest położenie
wektora przemieszczenia, czy też prędkości pola magnetycznego względem powierzchni
utworzonej przez zamknięte linie strumienia. Jeżeli wektor ten jest styczny do tej
powierzchni, to mówimy o przetwornikach z polem podłużnym, natomiast gdy jest
prostopadły, to takie obiekty określa się jako przetworniki z polem poprzecznym. Przykłady
podstawowych konstrukcji z polem podłużnym pokazano na rys 16.1.
Topologie przedstawione na rys.16.1.b, c posiadają istotną wadę, jaką jest niezrównoważona
magnetyczna siła przyciągająca obydwie części przetwornika. Siła ta jest znaczna
-
przeciętna
wartość naprężeń magnetycznych w szczelinie jest rzędu 0.4 MPa i musi być skompensowana
reakcją mechaniczną w punktach podparcia części ruchomej, co niepotrzebnie powiększa
koszty konstrukcji o łożyska dobrane z odpowiednią nośnością. Dlatego też, przetworniki
zarówno liniowe jak i obrotowe o strumieniu osiowym, nazywane też tarczowymi, są
przeważnie wykonywane w wariancie dwustronnym, gdzie część ruchoma (najczęściej z
magnesami trwałymi) jest symetrycznie umocowana względem uzwojonej części
nieruchomej. Istnieje również możliwość wykonania osiowo symetrycznego przetwornika
liniowego o skompensowanej sile przyciągającej. Mówimy wówczas o przetworniku z biegnikiem
tubowym, w którym wektor namagnesowania ma kierunek radialny. Również w maszynie o
2
strumieniu radialnym można wykonać dwustronny wirnik, co prowadzi do lepszego
wykorzystania objętości maszyny. Rozwiązanie to jest jednak wyraźnie droższe oraz
wymagające bardziej zaawansowanej technologii produkcji i dlatego też rzadko się je
spotyka. Wymienione konstrukcje przedstawiono schematycznie na rys.16.2.
Rys.16.1. Geometria obwodu magnetycznego wraz z przestrzennym położeniem linii strumienia w przetwornikach
elektromechanicznych z polem podłużnym
a. elektromagnes,
b. przetwornik liniowy,
c. przetwornik obrotowy o strumieniu radialnym,
d. przetwornik obrotowy o strumieniu osiowym.
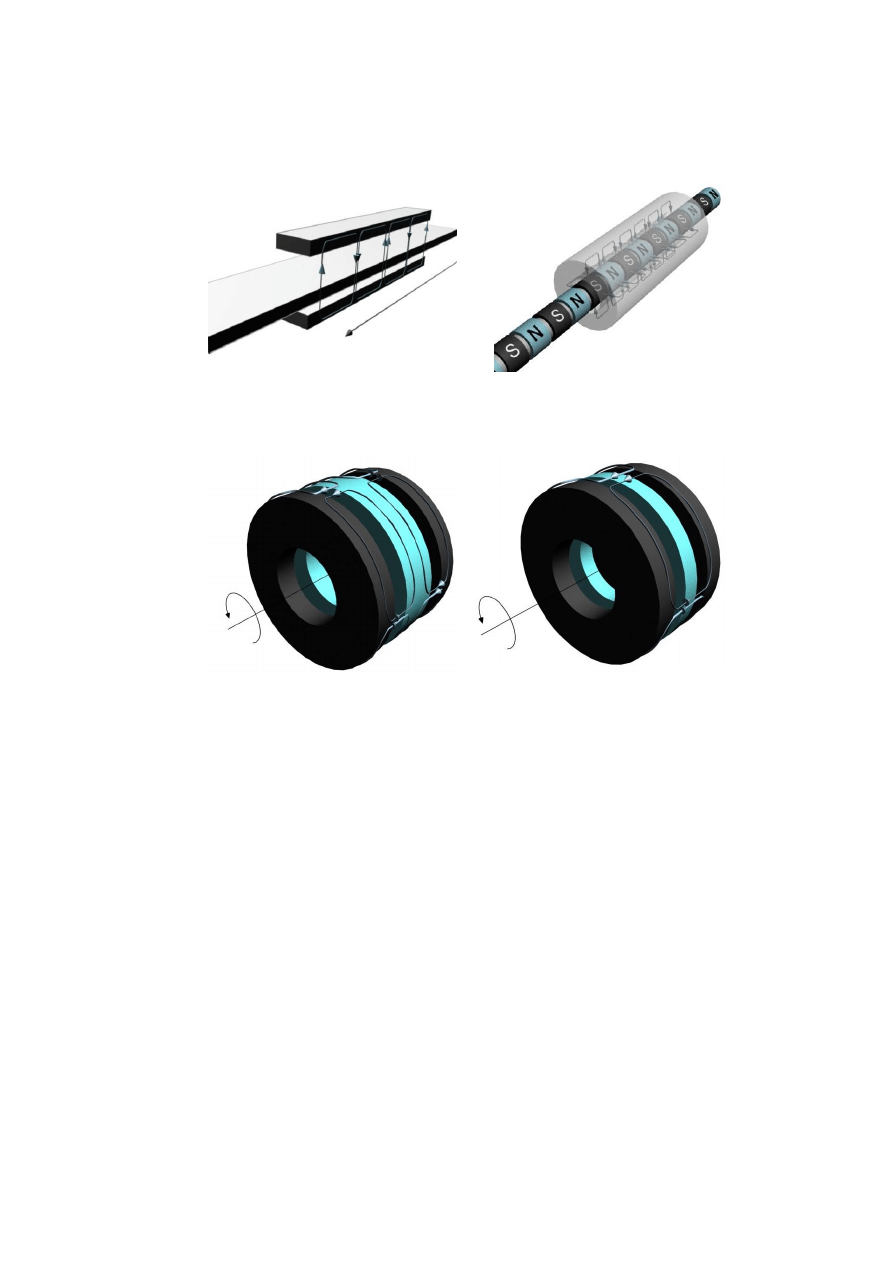
Przy rozwiązaniach podwójnych należy jeszcze zwrócić uwagę na możliwość wykonania
przetwornika o tzw. strumieniu skrośnym, w którym pole magnetyczne w części wewnętrznej
ma praktycznie tylko jedną składową. Konstrukcja ta jest stosowana zarówno w przetwornikach
o ruchu liniowym jak i obrotowym, często w wersji bez elementów ferromagnetycznych w
części wewnętrznej. W przypadku kiedy część wewnętrzna jest uzwojona, to rozwiązanie
takie zapewnia praktycznie niezmienną w czasie siłę, bądź moment elektromagnetyczny
pozbawionych składnika reluktancyjnego
.
Dodatkową zaletą maszyn tego typu jest relatywnie
niewielka masa bądź moment bezwładności dla przetworników obrotowych, co może mieć
v
a.
b.
c.
d.
v
3
znaczenie dla serwonapędów, w których jest istotne opóźnienie z jakim napęd reaguje na
sygnał sterujący.
Rys.16.2. Geometria obwodu magnetycznego wraz z przestrzennym położeniem linii strumienia w przetwornikach
elektromechanicznych z polem podłużnym o skompensowanych siłach magnetycznych.
a. przetwornik liniowy o strumieniu skrośnym,
b. przetwornik liniowy tubowy,
c. przetwornik obrotowy o strumieniu osiowym,
d. przetwornik obrotowy o strumieniu osiowym skrośnym.
Wśród teoretycznie możliwych do wykonania przetworników z polem poprzecznym
zastosowanie praktyczne znalazł jedynie silnik liniowy o strumieniu skrośnym. Jego wersja z
magnesami trwałymi i uzwojeniu skupionym jest pokazana na rys.16.3.
Niezależnie od zalet poszczególnych typów maszyn elektrycznych o ich zastosowaniu
decyduje rachunek ekonomiczny – jeżeli w danym urządzeniu jest możliwe zastosowanie
różnych wariantów konstrukcji przetwornika, to zazwyczaj wybierany jest ten, który ma
niższe koszty produkcji i eksploatacji. I tak pozyskiwanie ruchu liniowego na dużych
odległościach jest zdecydowanie tańsze poprzez zamianę ruchu obrotowego na liniowy za
pośrednictwem tarcia niż inwestowanie w kosztowny tor, którego większość jest w danej chwili
b.
a.
v
c.
d.
4
czasowej niewykorzystana. Dlatego też silniki liniowe są konstruowane dla względnie
krótkich torów, zwłaszcza tam, gdzie dodatkowo jest wymagane precyzyjne pozycjonowanie
napędu. Z kolei maszyny o wirniku tarczowym mają istotną wadę, jaką jest pracochłonny
proces wykonywania żłobków w zblachowanym rdzeniu. Dlatego też są stosowane tam, gdzie
istotną rolę odgrywa minimalizacja rozmiaru maszyny wzdłuż jej osi obrotu – na przykład w
piastach kół niewielkich pojazdów. Można więc dokonać pewnego uogólnienia –
przetworniki o strumieniu radialnym są wykorzystywane wszędzie tam, gdzie konstrukcyjne
ograniczenia na to pozwalają, są bowiem w zdecydowanej większości najtańszym
rozwiązaniem.
16.2. Obwody magnetyczne maszyn
z magnesami trwałymi.
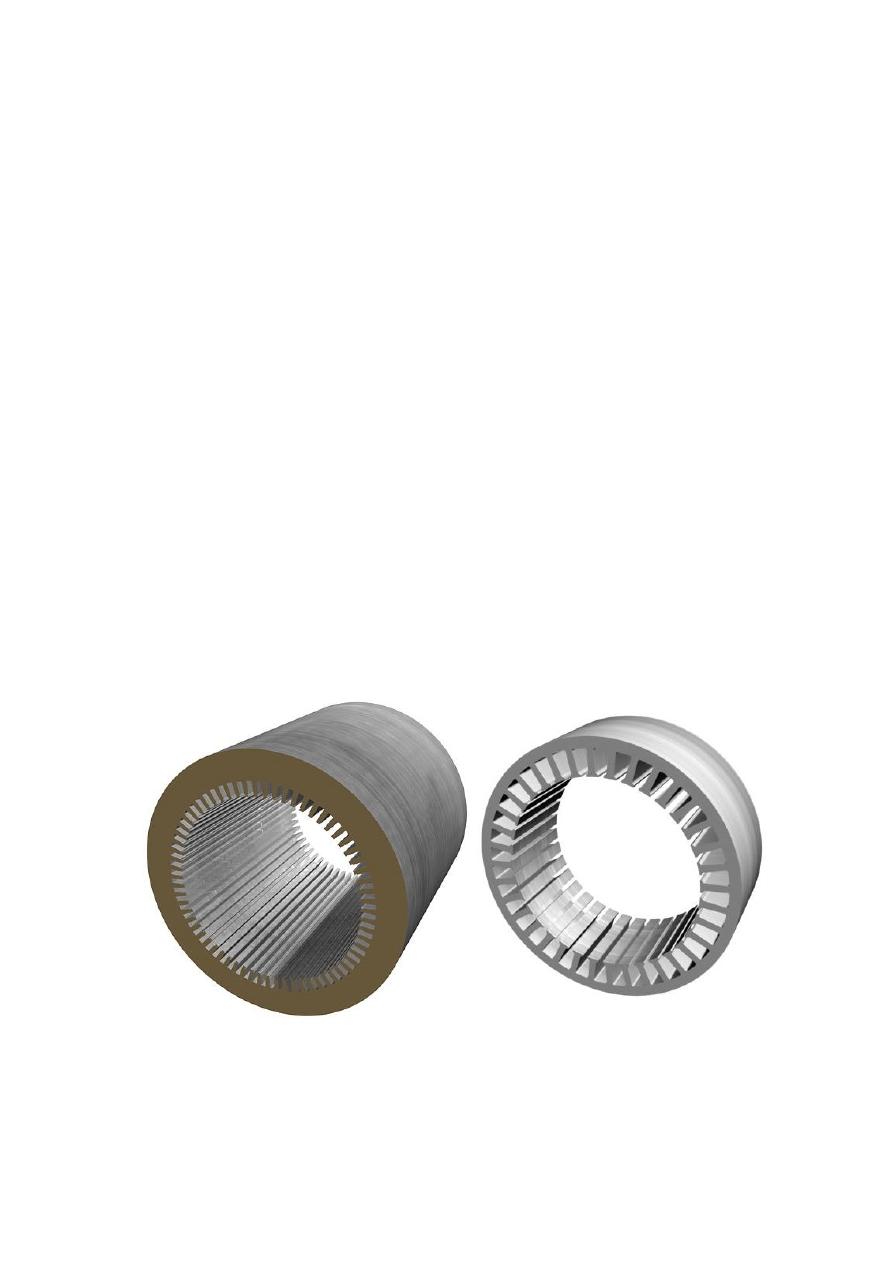
Stojany w maszynach synchronicznych o strumieniu radialnym mają taką samą strukturę,
niezależnie od rodzaju wzbudzenia, a także rozmiarów maszyny. Składają się z pakietów
użłobkowanych blach elektrotechnicznych, które mogą być w większych jednostkach
oddzielone kanałami wentylacji radialnej (rys.16.3). Sam gabaryt, kształt żłobka czy
proporcje wymiarów zębów i jarzma zależą oczywiście od mocy oraz liczby par biegunów w
maszynie.
a.
b.
Rys.16.3. Widok (bez zachowania skali) wykrojów blach stojana dla
a. maszyny o mocy 200 kW, 2p=4,średnica zewnętrzna 510 mm
b. maszyny o mocy 1.2 kW,2p=12, średnica zewnętrzna 120 mm.
5
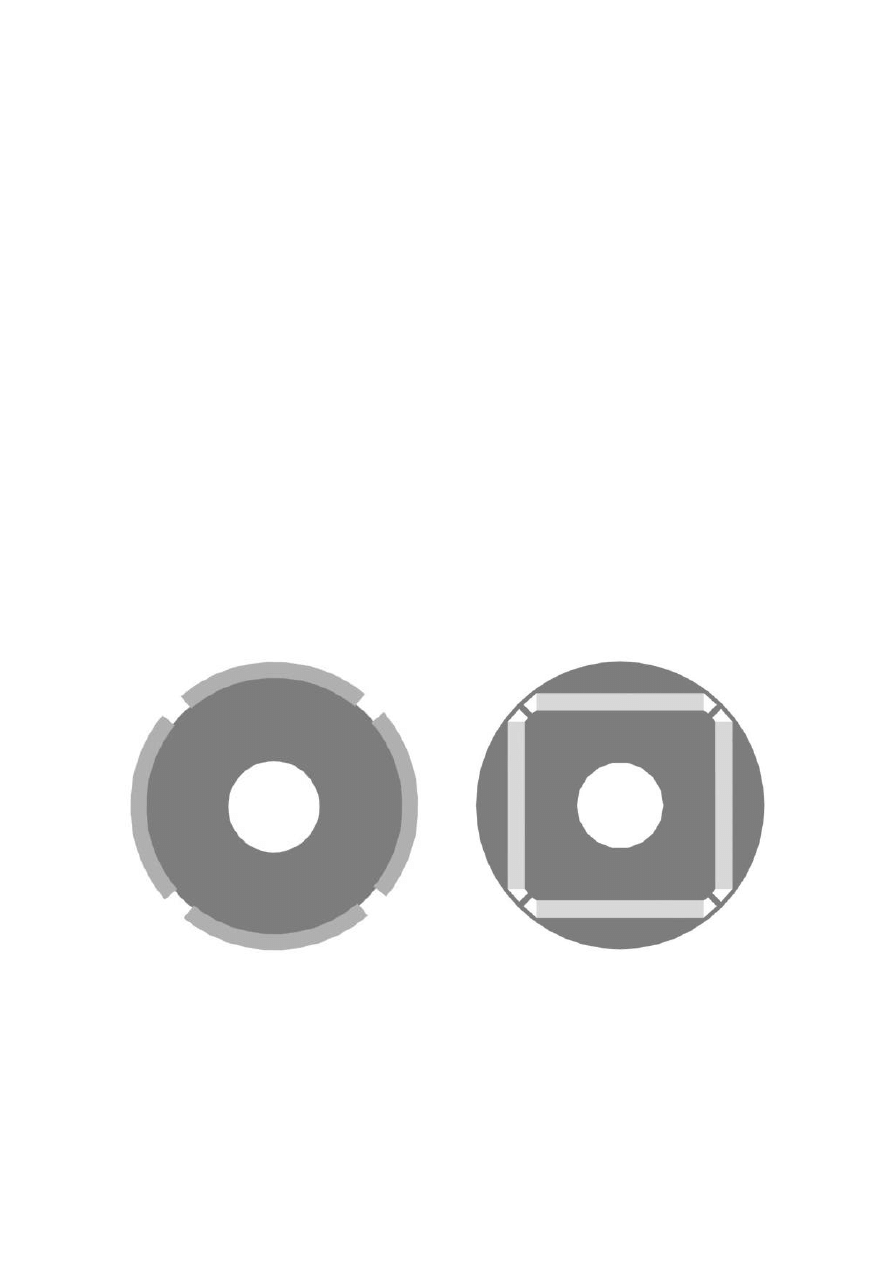
Różnice konstrukcyjne występują w usytuowaniu magnesów trwałych w wirniku.
Popularnym rozwiązaniem w maszynach małej mocy są tzw. magnesy powierzchniowe – w
postaci pliku pasków lub wycinków pierścienia umocowanych za pomocą taśm
termokurczliwych na powierzchni walcowej wirnika tak wyprofilowanej, aby było możliwe
uzyskanie przestrzennego rozkładu indukcji bliskiego sinusoidalnemu. Alternatywnym
sposobem jest zastosowanie magnesów utajonych w odpowiednio wyciętych otworach w
blachach pakietu wirnika. Wariant ten jest nieco lepszy z punktu widzenia własności
elektromagnetycznych, zapewnia bowiem większą różnicę pomiędzy przewodnościami
magnetycznymi w osiach d i q maszyny, dając tym samym dodatkowy moment reluktancyjny.
Rozwiązanie to jest jednocześnie droższe w wykonawstwie, wymaga bowiem wysokiej klasy
oprzyrządowania technologicznego, pozwalającego na precyzyjne wycięcie kształtu blachy.
Grubość przesmyku magnetycznego pomiędzy sąsiadującymi biegunami powinna być
z jednej strony jak najmniejsza, aby minimalizować strumień rozproszenia własnego
magnesu. Z drugiej jednak strony obszar ten zapewnia odpowiednią sztywność pakietu blach
wirnika i dlatego też jego wymiar w kierunku promieniowym jest kompromisem pomiędzy
własnościami magnetycznymi, wytrzymałościowymi oraz możliwościami technologicznymi.
a.
b.
Rys.16.4. Typowe kształty wykrojów wirników czterobiegunowej maszyny
a. z magnesami powierzchniowymi,
b. z magnesami utajonymi.
Często spotykanym rozwiązaniem w silnikach o ułamkowej mocy i znacznej liczbie
biegunów jest wykonanie tzw. koncentratorów strumienia magnetycznego. Polega to na
6
umiejscowieniu magnesów o przemiennym namagnesowaniu prostopadłym do promieni
wirnika, jak pokazano na rys.16.5. W wyniku tego indukcja w szczelinie maszyny może być
większa niż pozostałość magnetyczna samych magnesów. Pozwala to na zastosowanie
tańszych magnesów o mniejszej indukcji remanencji, co jest opłacalne w przypadku masowej
produkcji silników przeznaczonych do napędów powszechnego użytku. Należy pamiętać o
odseparowaniu obwodu magnetycznego wirnika od stalowego wału za pomocą tulei
niemagnetycznej. Brak tulei spowodowałby zwarcie magnetyczne magnesów trwałych –
praktycznie cały strumień wytworzony w wirniku zamykałby się poprzez wał, a nie przez
szczelinę.
Rys.16.5. Obwód magnetyczny wirnika z koncentratorami magnetycznymi i tuleją niemagnetyczną.
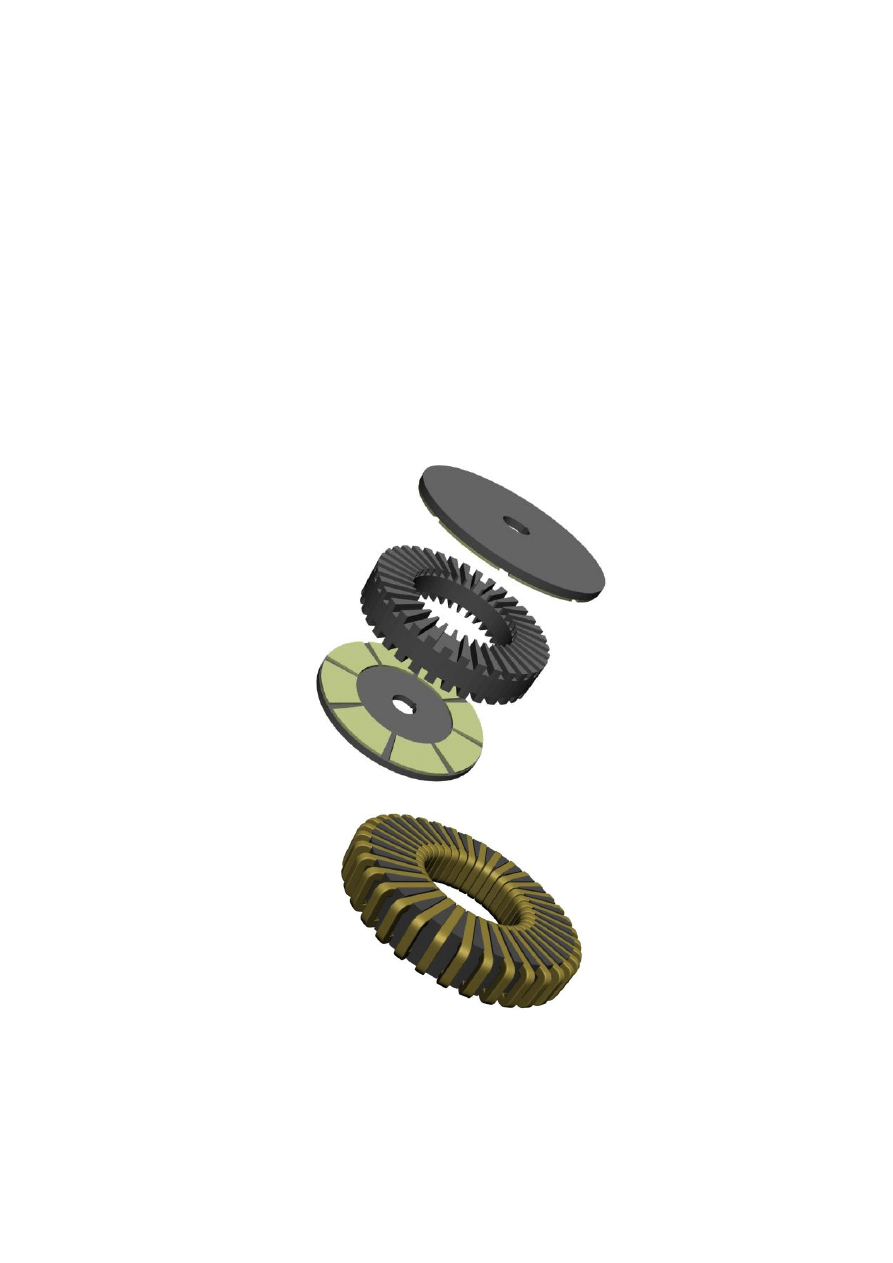
Silniki o polu osiowym (tarczowe) mają obwód magnetyczny stojana wykonany najczęściej w
postaci toroidu ze zwiniętej blachy elektrotechnicznej, w którym wycięte są dwie warstwy
żłobków jak pokazano na rys.16.6. Po obydwu stronach stojana są umieszczone dwa jarzma
wirnika, na których naklejone są magnesy wzbudzające pole magnetyczne. Należy pamiętać,
że wypadkowe siły magnetyczne działające na same magnesy przyciągają je do jarzm,
natomiast kompensujące je siły działające na jarzma są przeciwnie skierowane i znacznie
większe. Dlatego też niezbędne jest odpowiednie zaprojektowanie wału silnika, który musi
przenosić znaczne naprężenia ściskające. Wewnętrzny promień stojana jest ograniczony
z dołu ze względu na rozmiar objętości koniecznej dla rozmieszczenia połączeń czołowych
7
uzwojeń fazowych, natomiast płyty jarzm wirnika mają przekrój praktycznie kołowy.
Umożliwia to znaczne zmniejszenie ich grubości, która z kolei wynika z wielkości przekroju
określonego przez strumień magnetyczny pary magnesów i indukcję nasycenia materiału
jarzm. Dodatkowym utrudnieniem przy projektowaniu konstrukcji maszyny z wirnikiem
tarczowym jest opracowanie mechanicznego przeniesienia momentu z pakietu stojana na
zewnętrzną obudowę maszyny. W maszynach o dwustronnym wirniku – ze względu na
kompensację naciągu magnetycznego jest to preferowane rozwiązanie, uzwojenie stojana jest
typu bębnowego (Granma), które pozwala na znaczne zmniejszenie ilości drutu nawojowego.
Tym samym powiązanie konstrukcyjne pomiędzy obudową, a pakietem stojana musi
przeplatać się z połączeniami czołowymi cewek uzwojenia. Jest to kłopotliwe w wykonaniu
oraz przyczynia się do relatywnie małej sztywności stojana.
Rys.16.6. Dwustronny silnik tarczowy
a. obwód magnetyczny,
b. stojan z uzwojeniem bębnowym.
b.
a.

8
W mikromaszynach stosuje się niekiedy bezżłobkowe, dzielone rdzenie proszkowe, w
których pasma uzwojenia są nawijane bezpośrednio na wycinkach ferromagnetycznego
pierścienia, łączonych w fazie montażu w pełen obwód magnetyczny stojana.
Spośród wielu możliwych konfiguracji silników liniowych wykonanych ze
wzbudzeniem od magnesów trwałych warto omówić budowę dwóch typów – tubowego oraz z
biegnikiem bezrdzeniowym, ze względu na powszechność ich występowania. Obwód
magnetyczny twornika silnika tubowego składa się z powtarzalnych segmentów podziałki
żłobkowej, w których z kolei wyróżnia się pakiety jarzma oraz zębów wykonane z blachy
elektrotechnicznej. Pakiety zębów składają się z blach wyciętych w kształcie pełnego
pierścienia, przy czym w kilku początkowych zwykle wycina się dodatkowo wąski przesmyk
w kierunku promieniowym na wyprowadzenie zacisków cewek uzwojenia. Pakiet jarzma
przewodzi strumień magnetyczny w kierunku poosiowym, dlatego też jest on nawijany
spiralnie z pojedynczego paska blachy. Magnesy trwałe są mocowane na stalowym wale i
magnesowane przemiennie w kierunku radialnym
(rys.16.7).
Rys.16.7. Obwód magnetyczny silnika liniowego tubowego
pakiet zęba twornika
pakiet jarzma twornika
cewka uzwojenia
magnesy
9
Cechą charakterystyczną silnika tubowego jest znaczna zmienność indukcji magnetycznej w
rdzeniu twornika. W miarę oddalania się od wału maleje indukcja, gdyż rośnie przekrój zęba i
dlatego spadki napięcia magnetycznego w miejscach gdzie strumień jest skierowany
prostopadle do płaszczyzny blachy są niewielkie – promień jarzma twornika jest kilka razy
większy od zewnętrznego promienia magnesów.
Pojawienie się magnesów neodymowych o dużej pozostałości magnetycznej – rzędu
1.25-1.35 T, przy względnie niskiej ich cenie, umożliwiło budowę silników o bezrdzeniowym
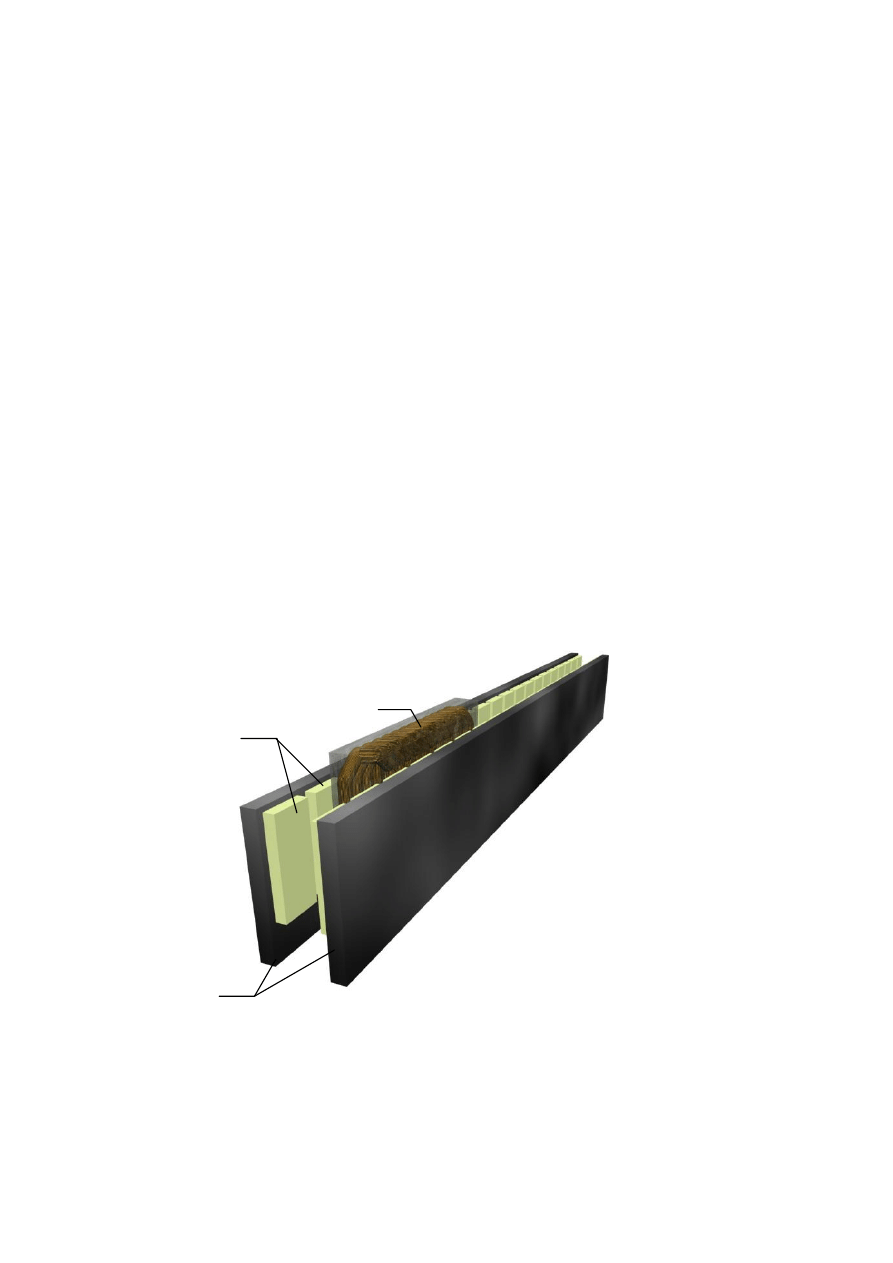
tworniku, zarówno obrotowych jak i liniowych. Stojan tych maszyn jest wykonany z dwóch
płyt stalowych pełniących rolę jarzm dla strumienia magnetycznego. Magnesy trwałe są
przyklejone do jarzm i tak namagnesowane, że tworzą okresowy w przestrzeni i jednocześnie
skrośny rozkład pola magnetycznego. Wielofazowe uzwojenie twornika wytwarza pole
biegnące, które oddziaływując z polem magnesów powoduje ruch twornika w przeciwnym
kierunku niż pole, co finalnie powoduje, że pole reakcji twornika jest nieruchome względem
magnesów. Skrośny charakter wypadkowego pola magnetycznego powoduje wzajemne
przyciąganie się jarzm z siłą o wartości mogącej osiągnąć nawet setki kilogramów na metr
długości silnika. Dlatego też jest niezbędna odpowiednio wytrzymała obudowa,
pozycjonująca względem siebie jarzma z magnesami trwałymi.
Rys.16.8. Obwód magnetyczny silnika liniowego płaskiego o strumieniu skrośnym
magnesy
jarzma
twornik
10
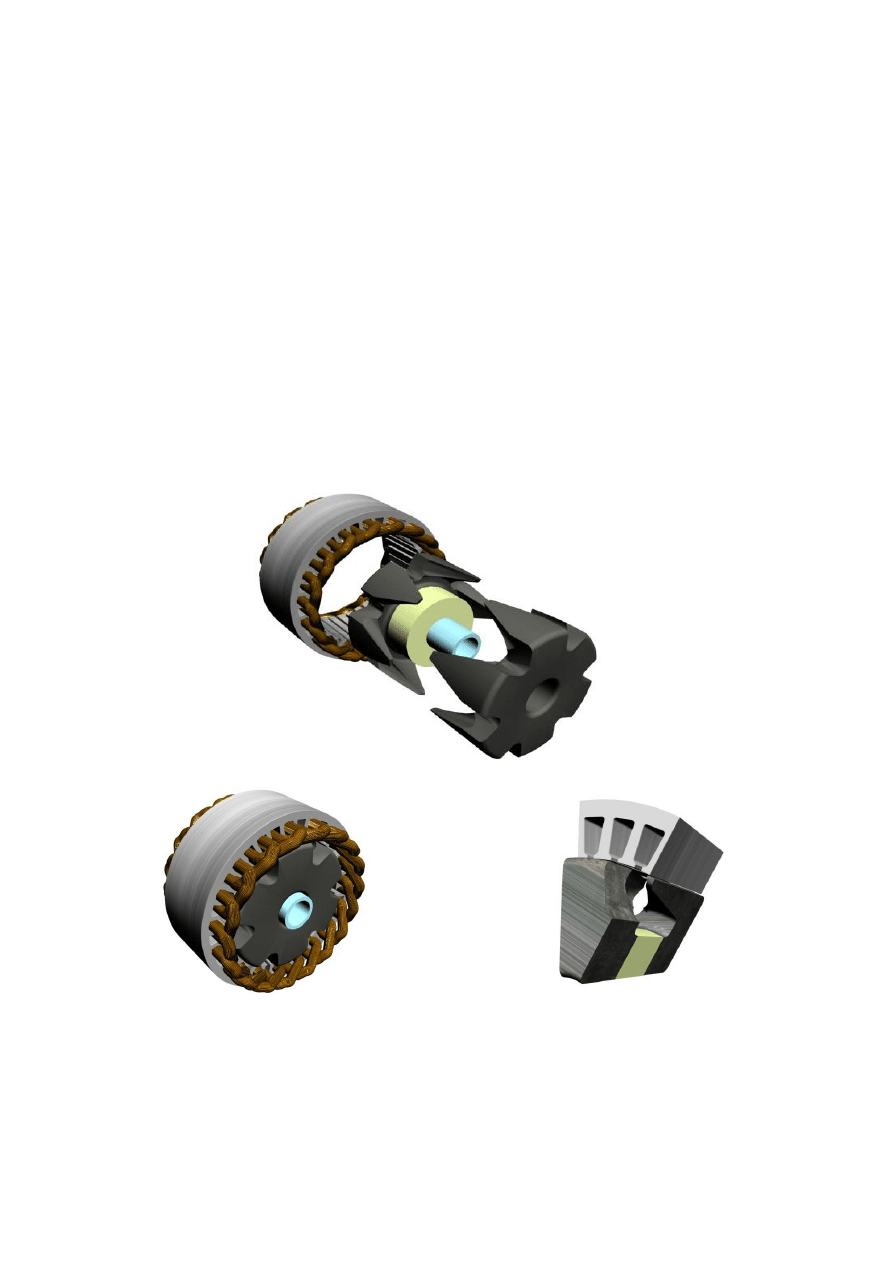
Kolejnym typem maszyny, w której mogą znaleźć zastosowanie magnesy trwałe, jest
prądnica synchroniczna z wirnikiem kłowym (alternator Lundell’a) powszechnie
wykorzystywana w przemyśle samochodowym. W wykonaniu klasycznym wzbudzenie pola
na wirniku jest elektromagnetyczne – toroidalna cewka zasilana prądem stałym poprzez
zestyk szczotkowy wytwarza strumień magnetyczny w kierunku osiowym. Strumień ten jest
następnie za pośrednictwem kłowych nabiegunników kierowany do stojana wykonanego jak
w maszynie o strumieniu radialnym. Zastąpienie uzwojenia wzbudzenia magnesem trwałym
powoduje, że stabilizacja napięcia na zaciskach twornika musi być uzyskiwana w odmienny
sposób. Zamiast kluczowania prądu wirnika można wykorzystać przełączanie liczby zwojów
w jedno lub wielofazowym uzwojeniu twornika, bądź też zastosować elektroniczny
przerywacz stabilizujący w zadanym przedziale napięcie wyprostowane.
Rys.16.9. Alternator z wirnikiem kłowym
a. części składowe,
b. widok aktywnych magnetycznie części maszyny,
c. podziałka biegunowa obwodu magnetycznego.
b.
a.
c.
11
W klasycznych obrotowych silnikach elektrycznych prądu przemiennego o strumieniu
radialnym moment stycznej siły magnetycznej pochodzi od wirującego względem stojana
pola magnetycznego uzyskanego dzięki superpozycji dwu lub trzech pól składowych
wytwarzanych przez uzwojenia przesunięte w przestrzeni i zasilane prądami fazowymi
przesuniętymi w czasie. Pole wypadkowe jest nieruchome względem pojedynczego zestawu
magnesów trwałych wytwarzając dzięki temu niezmienną w czasie styczną siłę
proporcjonalną do sinusa kąta przesunięcia osi pól stojana i wirnika.
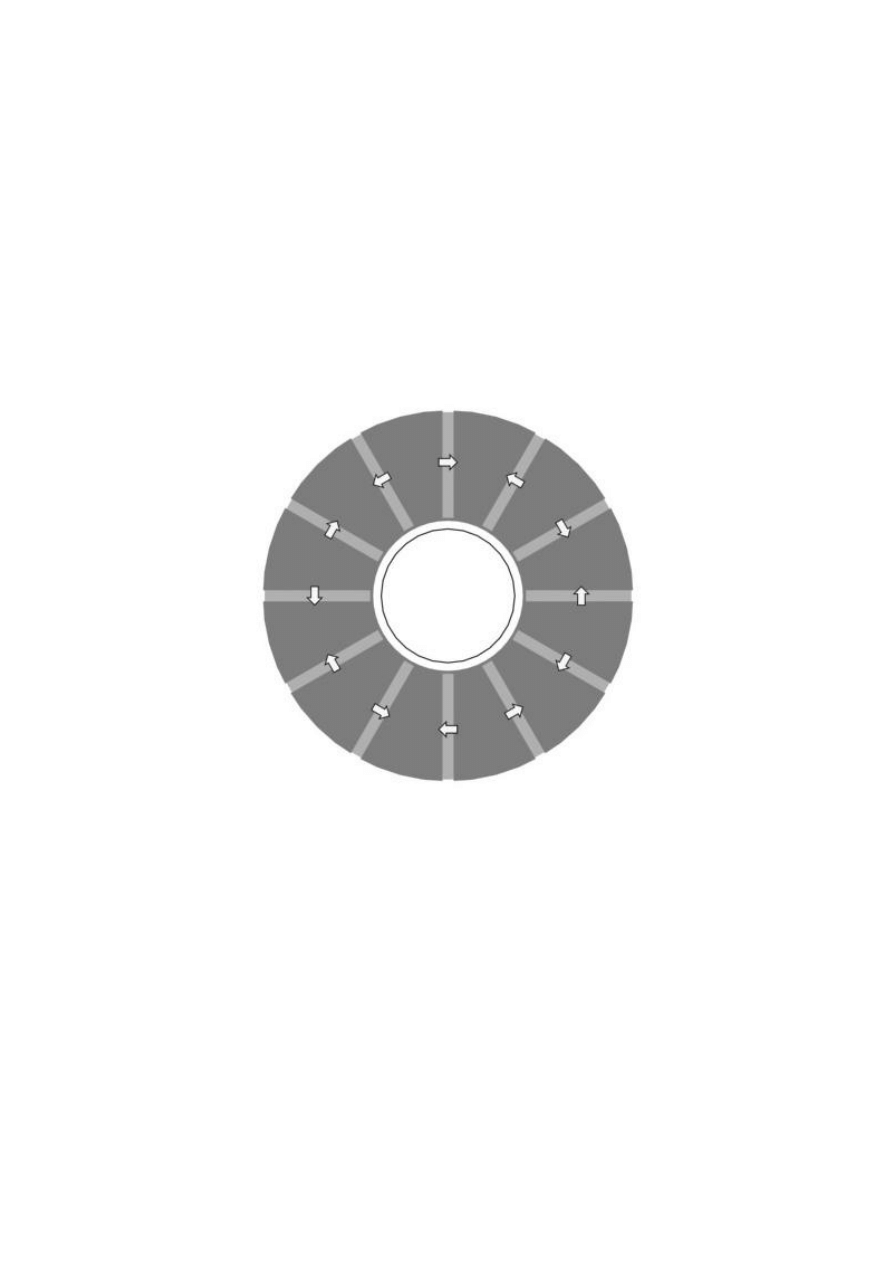
W silnikach o strumieniu poprzecznym (ang. Transverse Flux Motors) występują dwa
lub trzy moduły, wzajemnie odseparowane magnetycznie, w których pojedyncza cewka
(uzwojenie fazowe) wytwarza homopolarny rozkład pola magnetycznego zmienny w czasie
i nieruchomy w przestrzeni. Poszczególne moduły są przesunięte w przestrzeni - kątowo o kąt
fazowy
równy
/2 lub 2
/3 oraz osiowo – rys.1.
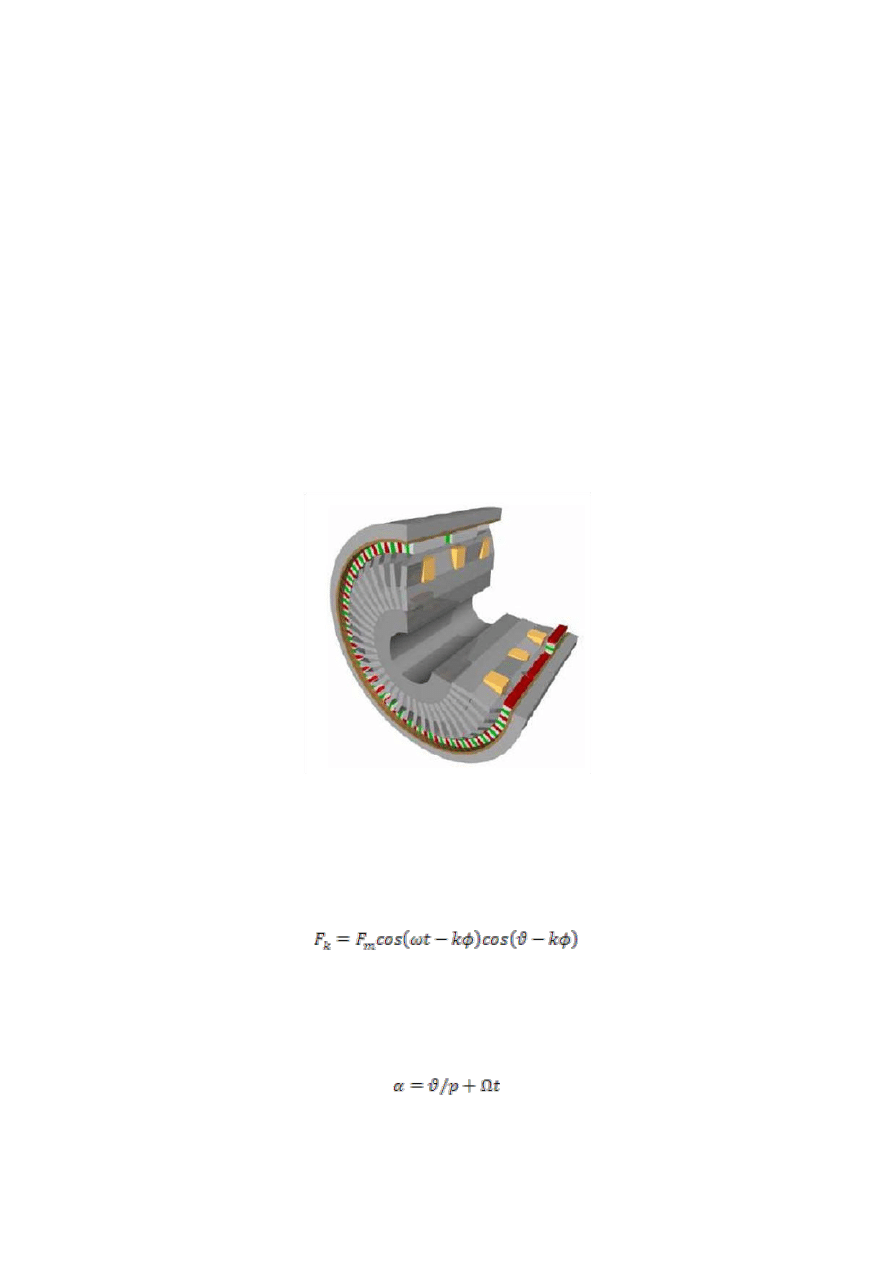
Rys.16.10. Topologia trójfazowego sinika z polem poprzecznym i zewnętrznym wirnikiem
Pole magnetyczne jest zmodulowane w przestrzeni obecnością 2p ferromagnetycznych jarzm
i generuje siłę styczną F
k
wzdłuż obwodu cewki określoną zależnością (dla idealnej maszyny)
w układzie współrzędnych wirnika
gdzie k=0,1,2 jest indeksem modułu (uzwojenia fazowego),
oznacza przesunięcie osi
magnetycznych stojana i wirnika w module o indeksie 0,
jest pulsacją zasilania.
Przechodząc do układu współrzędnych stojana
12
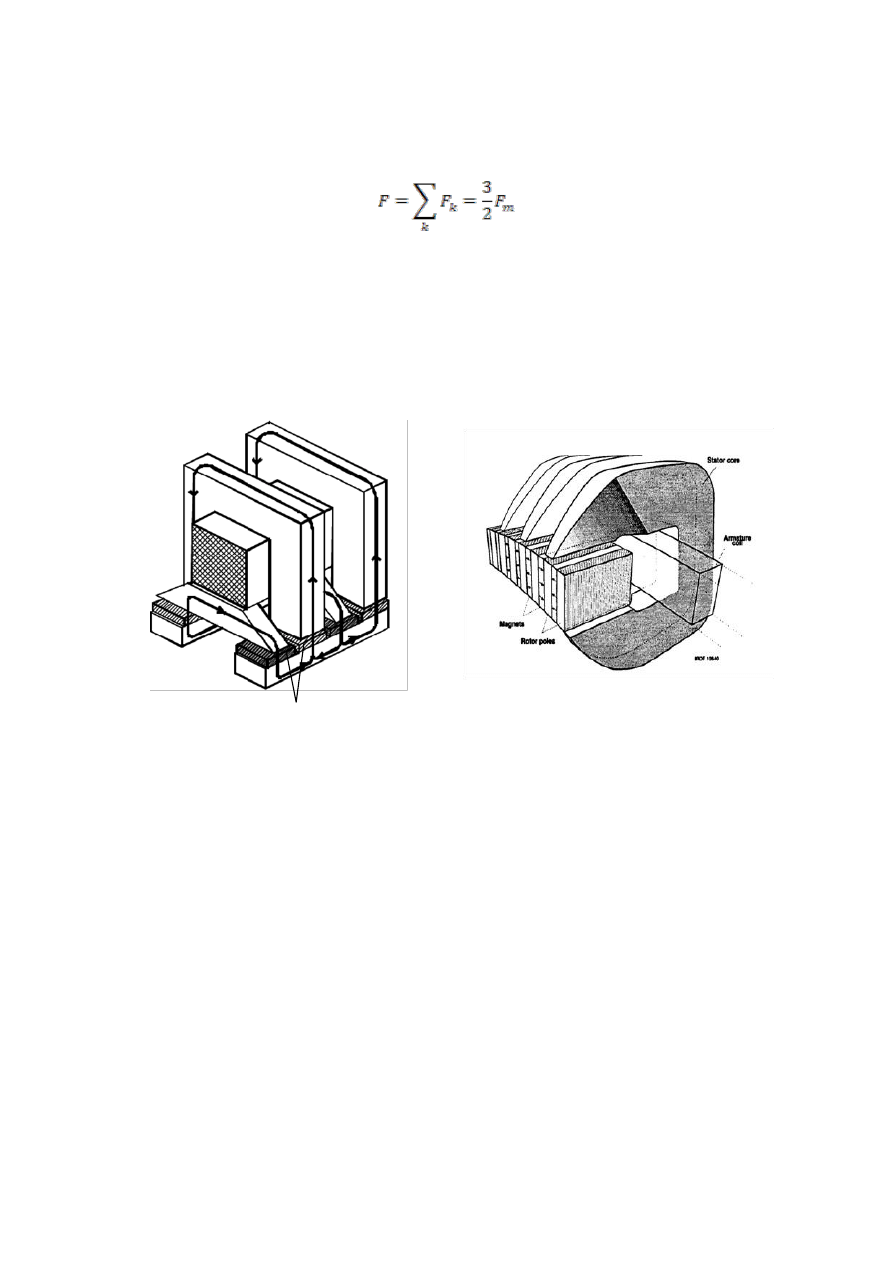
gdzie
p jest częstością kołową wirowania a p oznacza liczbę par biegunów i sumując
siły pochodzące od wszystkich modułów otrzymuje się niezmienną w czasie siłę wypadkową
Sumowanie sił odbywa się za pośrednictwem sztywnego mechanicznego połączenia
poszczególnych modułów.
Przykładowe topologie pojedynczych modułów o rozpiętości podwójnej podziałki
biegunowej pokazano na rys.2.
a.
b.
Rys.16.11. Geometria pojedynczego modułu silnika o polu poprzecznym
a. silnik jednostronny o magnesach powierzchniowych
b. silnik dwustronny o magnesach z koncentratorami i nabiegunnikach kłowych.
Rozpatrywane prototypy tych silników są konstruowane w bardzo szerokim przedziale mocy
znamionowych – od kilkunastu watów do kilkunastu MW. Podstawową zaletą maszyny z
polem poprzecznym jest wyraźnie lepszy wskaźnik mocy na jednostkę masy uzyskiwany
dzięki podwójnej aktywnej szczelinie, wadą zaś skomplikowana konstrukcja mechaniczna
mająca wpływ na wzrost kosztów produkcji. Tym niemniej, wiele zastosowań (np.
aeronautyka, robotyka) wymaga maszyn o możliwie małym ciężarze. Istniejące rozwiązania
technologiczne pozwalają zakładać pojawienie się seryjnej produkcji takich silników w
stosunkowo bliskim horyzoncie czasowym.
coil
magnets
Wyszukiwarka
Podobne podstrony:
16 Struktury maszyn z magnesami trwalymi
03 Struktury maszyn z magnesami trwałymi
16 Ustalanie wyniku finansowego Nieznany (2)
Montaz i naprawa maszyn i urzad Nieznany
II STRUKTURA KOMUNIKACJI SIECIO Nieznany
16 Wspieranie osoby niepelnospr Nieznany (2)
4 Struktura organizacyjna gmin Nieznany (2)
Analiza struktury id 61534 Nieznany (2)
MSR MSR 16 Rzeczowe aktywa trwa Nieznany
16 Wytwarzanie podstawowych pol Nieznany (2)
laboratorium maszyny synchronic Nieznany
16 Rozpoznawanie stanow biologi Nieznany
16 rozdzial 15 EJCDLTJY3F3I2FKL Nieznany (2)
16 rozdzial 15 zpgg3d2etikxyjv3 Nieznany
maszynoznawstwo uporzadkowane i Nieznany
Eksploatowanie maszyn i urzadze Nieznany
02 Charakteryzowanie maszyn rol Nieznany (2)
16 10 Bezpieczenstwo Ekologiczn Nieznany
więcej podobnych podstron