INSTYTUT
KONSTRUKCJ
MASZYN
LABORATORIUM
Z TEORII
MECHANIZMÓW I MASZYN
ZAKŁAD TEORII
MECHANIZMÓW I
MANIPULATORÓW
NR ĆW.:
TEMAT: Analiza kinematyczna mechanizmów metodami
numerycznymi
1. WPROWADZENIE
Do wyznaczania parametrów kinematycznych mechanizmów (prędkości, przyspieszenia)
oraz innych wielkości jak np. krzywizna toru, można wykorzystać metodę różnic
skończonych. Jej idea sprowadza się do zastąpienia nieskończenie małych przyrostów
występujących w rachunku różniczkowym, wielkościami małymi ale skończonymi (czyli
zastosowaniem rachunku różnicowego).
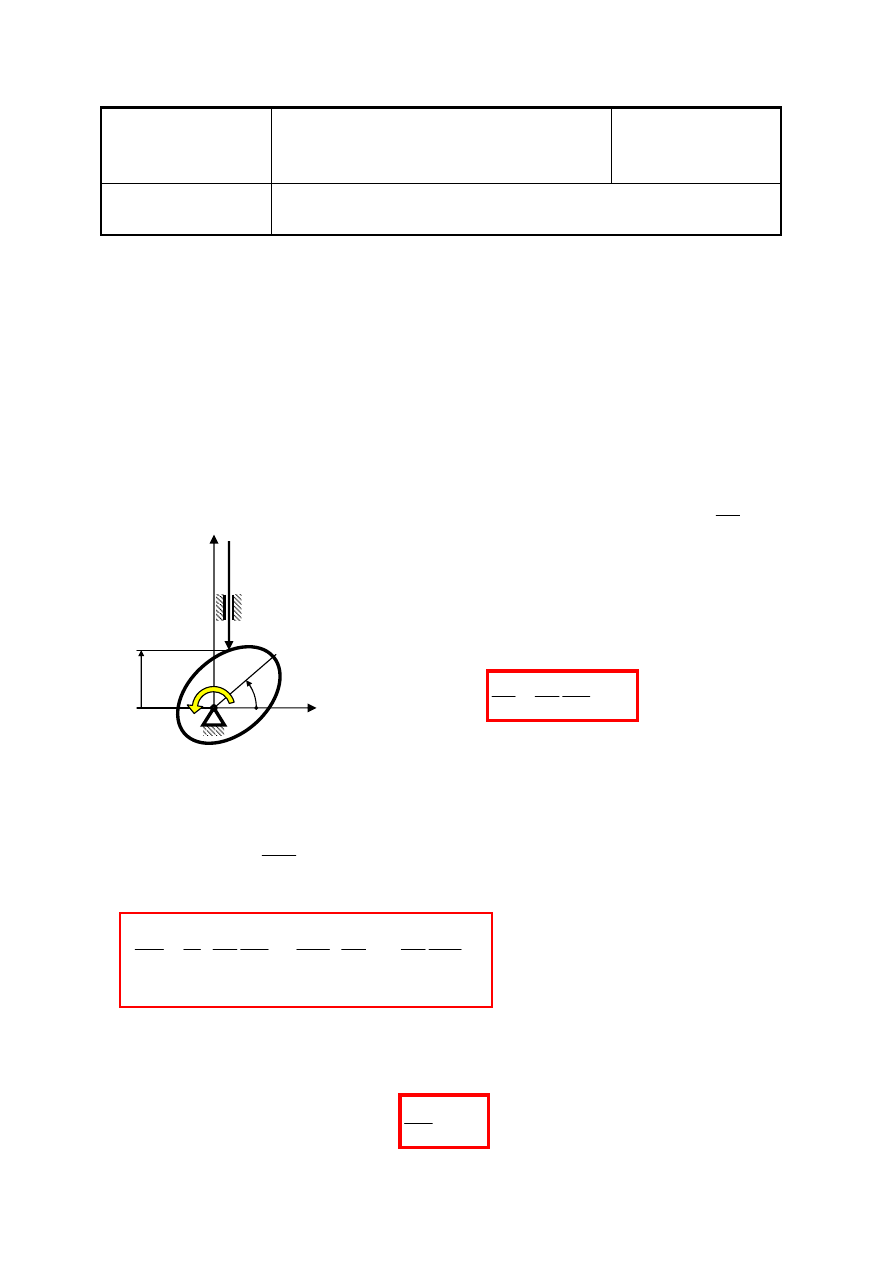
Pojęcie analogu prędkości oraz analogu przyspieszenia zostanie przedstawione na przykładzie
mechanizmu krzywkowego.
Analog prędkości (prędkość geometryczna)
α
d
s
d
'
s =
Wiedząc, że przemieszczenie popychacza s zależy od kąta
obrotu krzywki α, a ten jest zależny od czasu t co zapisać
w postaci
[
]
)
t
(
s
s
α
=
.
Różniczkując powyższą zależność po czasie otrzymujemy
ω
α
α
'
s
dt
d
d
s
d
dt
s
d
=
=
gdzie:
ω – prędkość kątowa krzywki.
Analog przyspieszenia (przyspieszenie geometryczne) –
zwane
również
charakterystyką
mechanizmu
krzywkowego
2
2
d
s
d
s
α
=
′′
Różniczkując po czasie zależność na prędkość popychacza otrzymujemy
gdzie:
ε
– przyspieszenie kątowe krzywki.
Jeśli
ω
= const
to:
2
"
2
2
s
dt
s
d
ω
=
.
y
x
α
ω
s
O
A
B
Rys. 1 Mechanizm
krzywkowy
ε
ω
α
α
α
α
α
α
'
2
"
2
2
2
2
2
2
2
s
s
dt
d
d
ds
dt
d
d
s
d
dt
d
d
s
d
dt
d
dt
s
d
+
=
=
+
=
=
2. CEL I ZAKRES ĆWICZENIA
Celem ćwiczenia jest przedstawienie praktycznego zastosowania metody różnic
skończonych do analizy kinematycznej mechanizmów. Ćwiczenie będzie obejmowało
wyznaczanie analogów prędkości i przspieszenia na podstawie pomiarów położeń ogniw.
3. PRZEBIEG ĆWICZENIA
• Wyznaczanie analogów prędkości i przyspieszenia popychacza w mechanizmach
krzywkowych
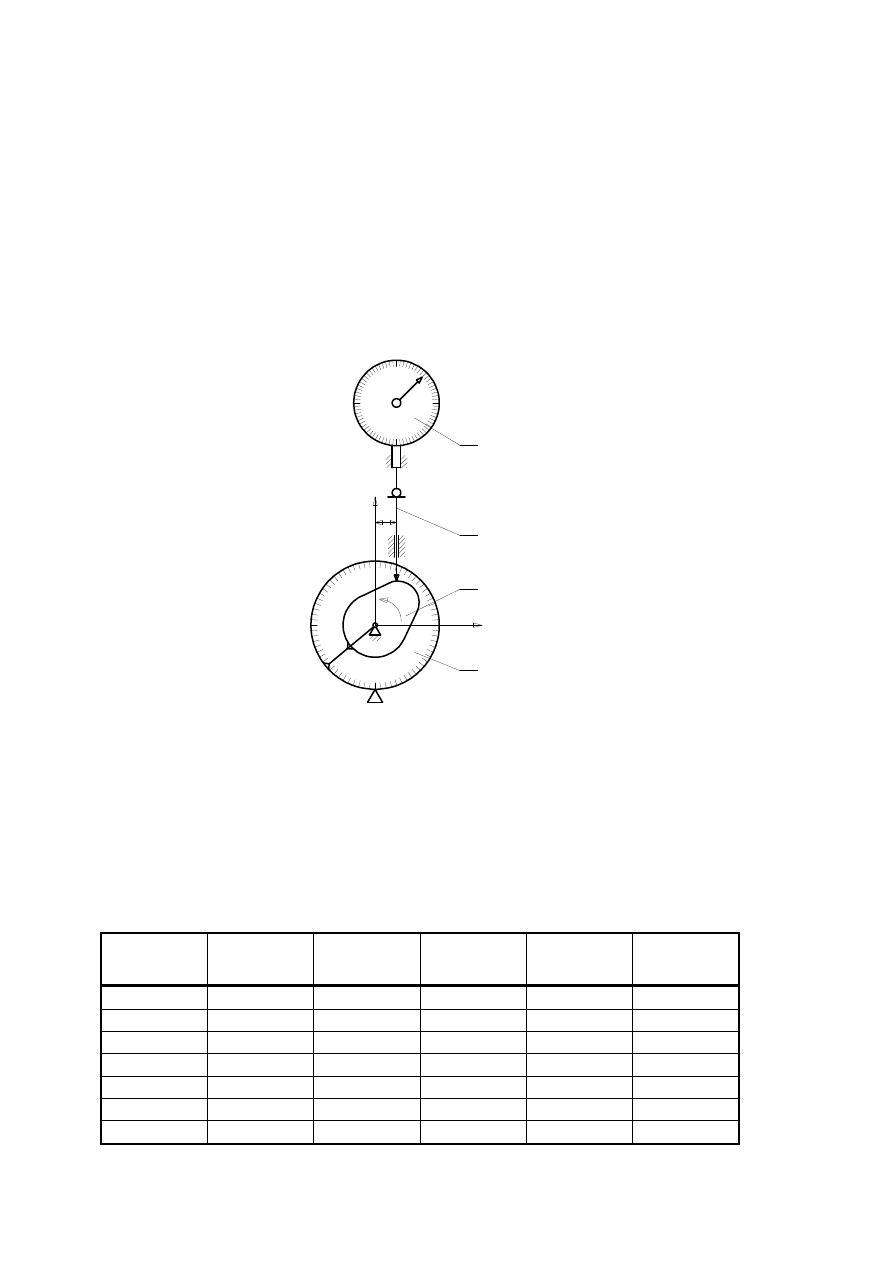
1. Zmierz mimośród ustawienia popychacza w stosunku do osi obrotu krzywki (e), zanotuj
jaki jest zastosowany popychacz (ewentualnie dokonaj pomiaru średnicy rolki), zmierz
również wymiary gabarytowe krzywki (rmin , rmax), wykonaj szkic stanowiska pomiarowego
z zaznaczeniem głównych wymiarów.
2. Dokonaj pomiaru wzniosu popychacza w funkcji kąta obrotu krzywki (co 10o).
3. Wylicz
'
i
s
oraz
"
i
s
wyniki zapisz w tabeli 1.
Tabela 1.
i
α
ι
α
ι
s
i
'
i
s
"
i
s
[-]
[deg]
[rad]
[m]
[m/rad]
[m/rad
2
]
0
0=360
1
10
2
20
...
...
...
...
35
350
36
360=0
Rys. 2. Schemat stanowiska pomiarowego
e
y
x
ω
1
2
3
4
1 - krzywka
2 - popychacz
3 - kątomierz
4 - czujnik zegarowy
4. Sporządź wykresy s
i
(
α
ι
),
'
i
s (
α
ι
),
"
i
s (
α
ι
)
(gdzie:
α
ι
- jest kątem obrotu krzywki).
5. Wyciągnij wnioski z przeprowadzonego ćwiczenia
Uwaga analogi prędkości i przyspieszenia wylicz z zależności:
α
∆
⋅
−
=
−
+
2
s
s
s
1
i
1
i
'
i
,
2
1
i
i
1
i
"
i
s
s
2
s
s
α
∆
−
+
+
⋅
−
=
.
• Wyznaczanie analogów prędkości i przyspieszenia dowolnego punktu mechanizmu
płaskiego
1. Zmierz wymiary podstawowe mechanizmu, wykonaj szkic stanowiska pomiarowego z
zaznaczeniem głównych wymiarów oraz przyjętego układu współrzędnych.
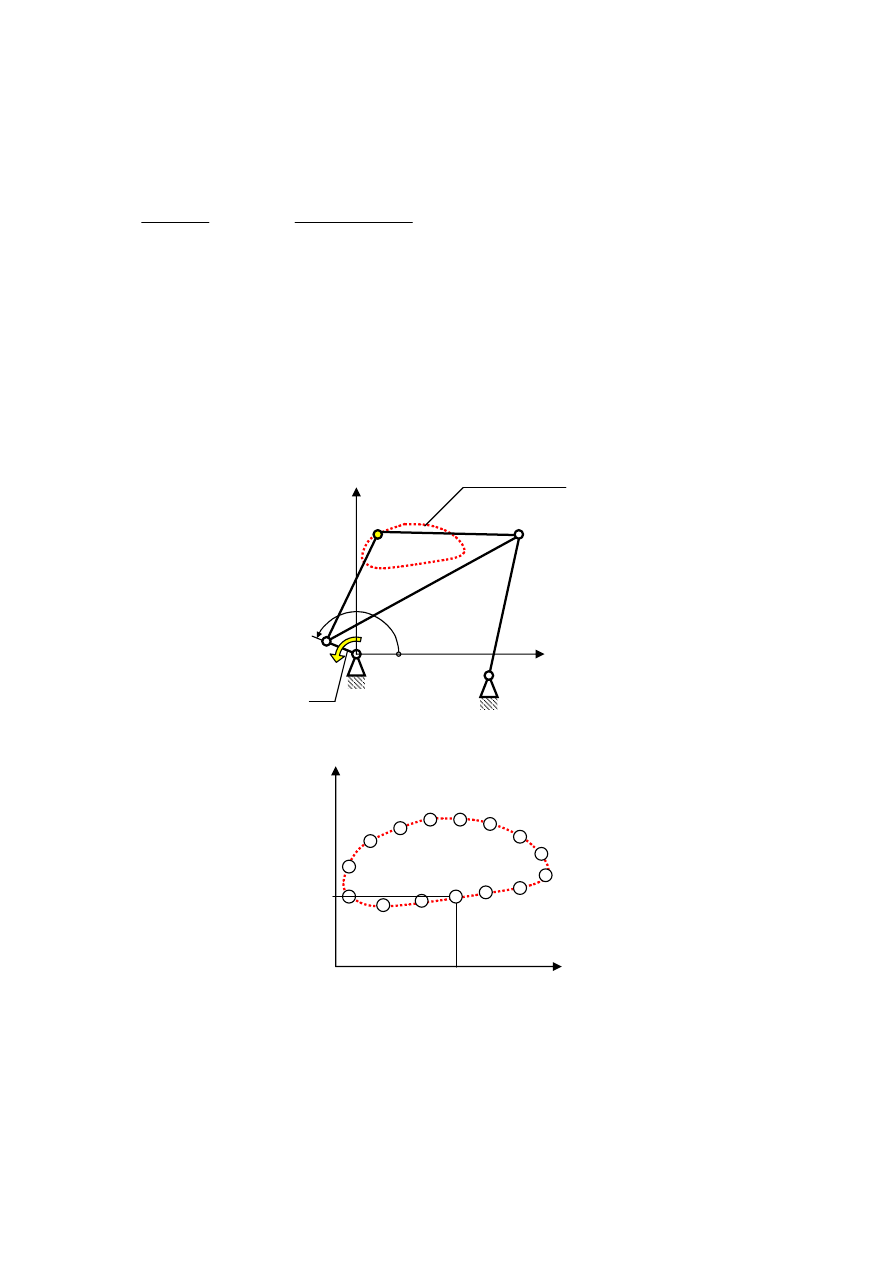
2. W przyjętym stałym układzie współrzędnych wyznacz położenia zadanego punktu
mechanizmu dla określonych położeń ogniwa napędowego. Przykładowy mechanizm
przedstawiono na rys. 3, zaś powiększony wykres toru punktu P na rys. 4.
Rys. 3. Schemat badanego mechanizmu
Rys. 4. Tor punktu P
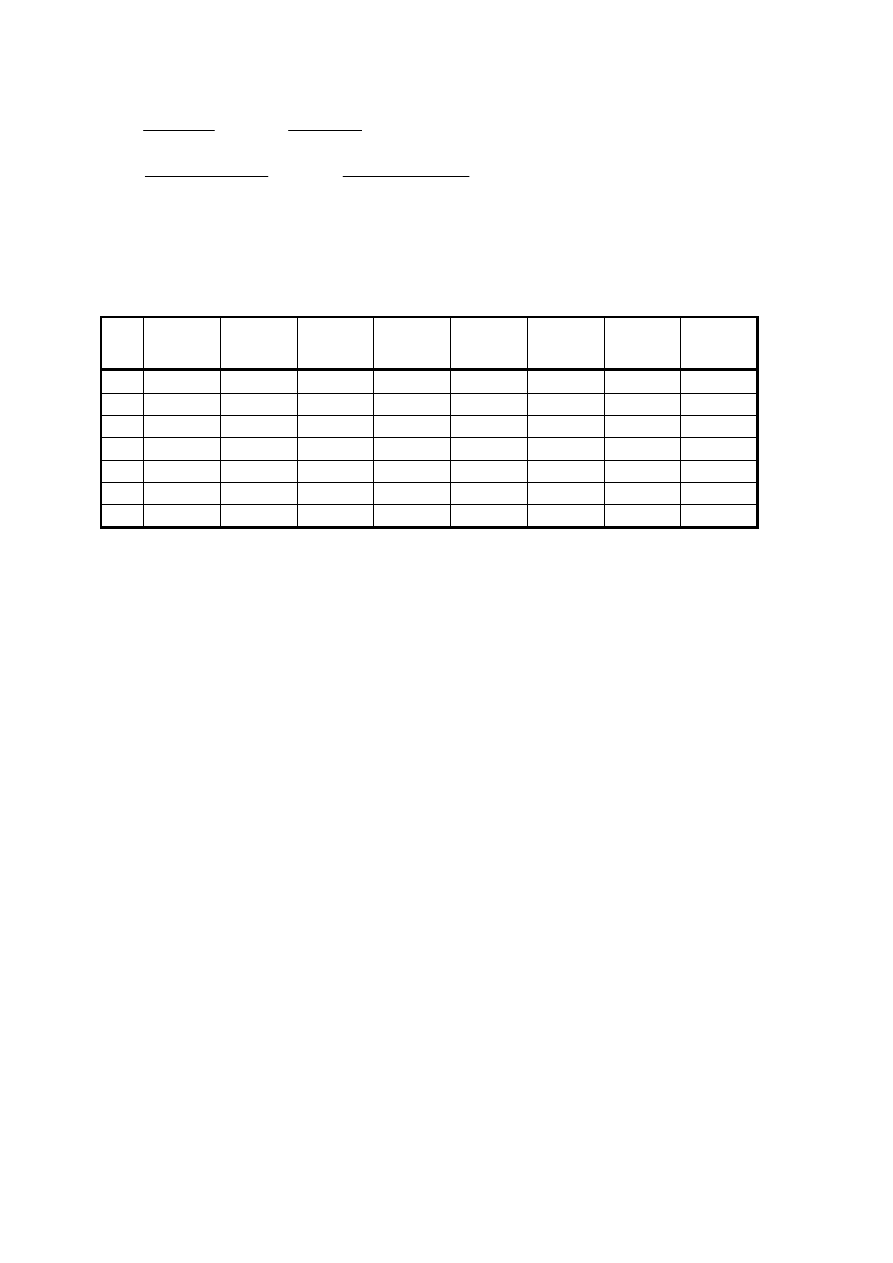
3. Wylicz składowe analogu prędkości i analogu przyspieszenia
"
i
"
i
'
i
'
i
y
,
x
,
y
,
x
wyniki zapisz
w tabeli 2.
Uwaga analogi prędkości i przyspieszenia wylicz z zależności:
P
B
3
2
D
C
tor punktu P
1
α
x
y
x
y
P
i
y
i
x
i
P
i+1
P
i-1
α
∆
⋅
−
=
−
+
2
x
x
x
1
i
1
i
'
i
,
α
∆
⋅
−
=
−
+
2
y
y
y
1
i
1
i
'
i
,
2
1
i
i
1
i
"
i
)
(
x
x
2
x
x
α
∆
−
+
+
⋅
−
=
,
2
1
i
i
1
i
"
i
)
(
y
y
2
y
y
α
∆
−
+
+
⋅
−
=
.
4. Sporządź wykresy
)
(
y
,
)
(
x
,
)
(
y
,
)
(
x
,
)
x
(
y
i
"
i
i
"
i
i
'
i
i
'
i
i
i
α
α
α
α
(gdzie:
α
ι
- jest kątem obrotu
ogniwa napędowego.
Tabela 2.
i
α
ι
α
ι
x
i
y
i
'
i
x
'
i
y
"
i
x
"
i
y
[-]
[deg]
[rad]
[m]
[m]
[m/rad] [m/rad] [m/rad
2
] [m/rad
2
]
0
0=360
1
10
2
20
...
...
...
...
35
350
36
360=0
5. Wyciągnij wnioski z przeprowadzonego ćwiczenia
4. PYTANIA KONTROLNE
1. Sposoby oceny poprawności otrzymanych wyników (pochodzących z metody różnic
skończonych)
2. Metody „wygładzania” wykresów prędkości i przyspieszenia otrzymanych z metody różnic
skończonych
3. Przykłady zastosowania metody różnic skończonych do analizy kinematycznej
mechanizmów, wyznaczanie podstawowych parametrów kinematycznych
4. Założenia metody aproksymacji, warunki brzegowe dla badanego mechanizmu
krzywkowego
5. Funkcje typu „spline” - warunki sklejania
6. Analog prędkości i przyspieszenia
7. Podstawowe wiadomości o metodzie różnic skończonych
5. LITERATURA
[1] - Młynarski T., Listwan A., Pazderski E.: Teoria maszyn i mechanizmów, cz. III Analiza
kinematyczna mechanizmów, Politechnika Krakowska, Kraków 1992, (str. 269-288).
[2] - Olędzki A.: Teoria maszyn i mechanizmów, WNT, Warszawa 1987, str. 54-58
WZÓR ARKUSZA SPRAWOZDAWCZEGO
INSTYTUT
KONSTRUKCJI
MASZYN
LABORATORIUM
z TEORII
MECHANIZMÓW I MASZYN
ZAKŁAD TEORII
MECHANIZMÓW I
MANIPULATORÓW
NR ĆW.:
TEMAT:
Rok akad. ................
Grupa: .....................
Zespół: ....................
Data: .......................
Członkowie zespołu:
1. ...............................................
2. ...............................................
3. ...............................................
1. Schemat i opis stanowiska pomiarowego
2. Zestawienie wyników pomiarów
3. Opracowanie wyników pomiarów (zgodnie z instrukcją do ćwiczenia)
4. Wnioski
Wyszukiwarka
Podobne podstrony:
Materialy pomocnicze prezentacja maturalna
Materialy pomocnicze do cwiczen Statystyka cz I
obciazenia wiatr snieg materiały pomocnicze z budownictwa ogólnego
Materiał pomocniczy, Szkoła, wypracowania, ściągi
sciaga z ESP, Uczelnia, Technologia budowy maszyn, Materiały pomocnicze
Materiały pomocne przy nauce podsumowanie powyższych wykładów wersja mini
Materialy pomocnicze cardan AG Nieznany
Materialy pomocnicze 4 id 28534 Nieznany
Ciania PKM, Materiały pomocnicze do projektowania
Kruszarka Jednowalcowa, Uczelnia, Technologia budowy maszyn, Materiały pomocnicze
A.Materiały pomocnicze, BMR, Broń Jądrowa
Motyw dziecka, Materiały pomocnicze, Motywy literackie
Materialy, MBM PWR, Materiałoznawstwo, Materiały pomocnicze
cwiczenie nr 1 materialy pomocn Nieznany
cwiczenie nr 3 materialy pomocn Nieznany
Materiały pomocnicze LAB1
Materialy pomocnicze do testu II Gospodarka finansowa zakl
więcej podobnych podstron