I.
Silniki elektryczne
–
wiadomości ogólne
Silnik elektryczny to maszyna przetwarzająca energię elektryczną
na energię mechaniczną, zwykle w postaci ruchu obrotowego.
Moment obrotowy powstaje w silniku elektrycznym w wyniku
oddziaływania pola magnetycznego i prądu elektrycznego. Silnik
elektryczny składa się ze stojana (z osadzoną parą lub kilkoma
parami uzwojeń elektromagnesów) oraz wirnika z uzwojeniem
twornikowym. Zależnie od prądu zasilającego rozróżnia się silnik
elektryczny prądu stałego oraz silniki elektryczny prądu
przemiennego.
Silnik prądu stałego ma na osi wirnika pierścień złożony z
izolowanych działek (tzw. komutator) łączonych z zaciskami uzwojeń
twornika; po komutatorze ślizgają się doprowadzające prąd
nieruchomo osadzone szczotki dociskane do powierzchni komutatora;
Szeregowe: prędkość obrotowa zmniejsza się wraz ze wzrostem
obciążenia. Są stosowane w trakcji elektrycznej i dźwignicach;
równoległe: prędkość obrotowa jest niezależna od obciążenia. Są
stosowane np. do napędzania obrabiarek; szeregowo-równoległe
są stosowane do napędzania maszyn o stałej prędkości obrotowej i
dużych momentach obrotowych.
Silnik prądu przemiennego
Asynchroniczne; dzielą się na 1- i 3-fazowe, a zależnie od zasady
działania na indukcyjne, synchroniczne i komutatorowe. Silniki
indukcyjne (asynchroniczne) są najbardziej rozpowszechnione .
Najtańsze i najczęściej stosowane są odznaczające się najprostszą
budową silniki indukcyjne klatkowe (zwarte); Synchroniczne różnią
się od silników elektrycznych indukcyjnych budową wirnika, który jest
wyposażony dodatkowo w elektromagnesy zasilane prądem stałym ze
wzbudnicy osadzonej na wale wirnika; liczba biegunów
elektromagnesów odpowiada liczbie biegunów pola wirującego
stojana; ponieważ moment obrotowy jest wynikiem wzajemnego
oddziaływania na siebie biegunów magnetycznych elektromagnesów i
pola wirującego, obroty wirnika są synchroniczne z obrotami pola i
mają stałą prędkość. Stosowane są do napędzania maszyn
szybkoobrotowych o stałej prędkości obrotowej, np. sprężarek.
Komutatorowe (szeregowe i równoległe) mają wirnik z komutatorem,
do którego doprowadza się prąd przemienny za pomocą szczotek.
Elektryczne uniwersalne, które mogą być zasilane prądem stałym
lub przemiennym; stosowane do napędzania sprzętu gospodarstwa
domowego, maszyn biurowych itp. Silnik liniowy, przetwarza energię
elektryczną bezpośrednio na energię ruchu postępowego; składa się
z induktora i bieżnika, które są odpowiednikami stojana i wirnika, lecz
rozwiniętymi w linię prostą.
I. Silniki skokowe (inaczej krokowe)
Silnik krokowy przekształca impulsy elektryczne w dyskretne ruchy
mechaniczne. Oś silnika obraca się o niewielkie przyrosty kąta pod
wpływem impulsów elektrycznych, podawanych w odpowiedniej
kolejności. Obroty silnika są związane bezpośrednio z podawanymi
impulsami na kilka sposobów. Kierunek obrotów osi jest ściśle
związany z sekwencją podawanych impulsów, prędkość obrotów
zależy od częstotliwości tych impulsów, a kąt obrotu - od ich ilości.
Częste zastosowanie silników krokowych można zaobserwować w
automatyce przemysłowej.
rodzaje silników krokowych:
-Silnik reluktancyjny składa się z
rotora o wielu zębach wykonanego z
miękkiej stali i uzwojonego stojana.
Kiedy uzwojenia stojana są zasilane
prądem stałym, bieguny
namagnesowują się. Ruch pojawia się
na skutek przyciągania zębów rotora
przez zasilane bieguny stojana.
Linie pola magnetycznego wykazują
dążenie do zamknięcia się w obwodzie
o najmniejszej reluktancji. W ten sposób
powstaje moment obrotowy, który dąży
do ustawienia wirnika w położeniu q = 0.
Strumień w obwodzie
magnetycznym opisany jest
wzorem
kąt_fi=I
z
/ R
m
i jest funkcją przepływu I
z
oraz reluktancji
Zasada działania silnika skokowego o wirniku reluktancyjnym
Na rysunku wyżej są trzy takty pracy tego silnika. Kiedy prąd pojawi
się w paśmie 1-1, wirnik zajmie położenie pokazane w A) Gdy w
następnej chwili nastąpi jednoczesne zasilenie pasm 1-1 i 2-2,
wówczas wirnik zajmie położenie odpowiadające największej
permeancji dla strumienia wytworzonego przez przepływy obu
uzwojeń. Następnie w paśmie 1-1 nie ma już prądu i wirnik
znajduje się w położeniu pokazanym na
C) Komutacja silnika przebieg w następującej kolejności :
-SILNIK o magnesach trwałych ( czynny ) - silnik skokowy o wirniku
wytwarzającym strumień
magnetyczny i o stojanie z
uzwojeniem sterującym.
Wirnik silnika stanowią
magnesy trwałe . Na stojanie
znajdują się bieguny wydatne,
na których umieszczone są
pasma uzwojenia 1-1 i 2-2.
Do pasm 1-1 i 2-2 uzwojenia
sterującego podawane są
impulsy . Pod wpływem wytworzonego momentu synchronizującego
po każdym impulsie wirnik obraca się o kąt skoku. Wytworzenie
momentu synchronizującego odbywa się na podobnej zasadzie
jak w zwyczajnym silniku synchronicznym. Tak więc kolejność
przełączania ( komutacji ) pasm 1-1 i 2-2 uzwojenia sterującego
przedstawia wykres przebiegu napięć pasmowych w funkcji czasu.
Każdemu impulsowi odpowiada określone położenie wirnika silnika:
położenie A) odpowiada pierwszemu impulsowi, położenie B) –
drugiemu, C) – trzeciemu impulsowi napięciowemu.
Silnik hybrydowy jest bardziej kosztowny niż silnik z magnesem
trwałym, ale ma lepsze parametry jeśli
chodzi o rozdzielczość, moment i
szybkość. Typowe kąty silnika
hybrydowego mieszczą sie w zakresie
3,6° - 0,9° (100 - 400 kroków na obrót).
Silnik hybrydowy łączy w sobie zalety
silnika ze zmienną reluktancją i silnika z
magnesem trwałym. Rotor ma wiele
zębów jak w silnikach VR i posiada osiowo namagnesowane
magnesy umieszczone koncentrycznie wokół osi. Żeby rotora
zapewniają lepszą drogę przepływowi magnetycznemu, co dalej
polepsza charakterystyki momentu spoczynkowego i dynamicznego w
porównaniu z silnikami VR i PM.
Dwa najczęściej używane typy silników krokowych to silniki z
magnesem trwałym i hybrydowe.
Schemat blokowy silnika skokowego:
Stany pracy silnika skokowego
W stanie statycznym, w uzwojeniach silnika skokowego występuje
prąd stały, wytwarzając nieruchome pole magnetyczne. Na wirnik
działa moment synchronizujący, który dąży do przywrócenia
początkowego położenia równowagi, naruszonego po zadziałaniu
momentu z zewnątrz.
Stan quasistatyczny występuje przy odpracowaniu pojedynczych
skoków; wirnik przed wykonaniem każdego skoku powinien osiągnąć
II.Silniki wykonawcze prądu stałego:
I.
Silniki elektryczne
–
wiadomości ogólne
Silnik elektryczny to maszyna przetwarzająca energię elektryczną
na energię mechaniczną, zwykle w postaci ruchu obrotowego.
Moment obrotowy powstaje w silniku elektrycznym w wyniku
oddziaływania pola magnetycznego i prądu elektrycznego. Silnik
elektryczny składa się ze stojana (z osadzoną parą lub kilkoma
parami uzwojeń elektromagnesów) oraz wirnika z uzwojeniem
twornikowym. Zależnie od prądu zasilającego rozróżnia się silnik
elektryczny prądu stałego oraz silniki elektryczny prądu
przemiennego.
Silnik prądu stałego ma na osi wirnika pierścień złożony z
izolowanych działek (tzw. komutator) łączonych z zaciskami uzwojeń
twornika; po komutatorze ślizgają się doprowadzające prąd
nieruchomo osadzone szczotki dociskane do powierzchni komutatora;
Szeregowe: prędkość obrotowa zmniejsza się wraz ze wzrostem
obciążenia. Są stosowane w trakcji elektrycznej i dźwignicach;
równoległe: prędkość obrotowa jest niezależna od obciążenia. Są
stosowane np. do napędzania obrabiarek; szeregowo-równoległe
są stosowane do napędzania maszyn o stałej prędkości obrotowej i
dużych momentach obrotowych.
Silnik prądu przemiennego
Asynchroniczne; dzielą się na 1- i 3-fazowe, a zależnie od zasady
działania na indukcyjne, synchroniczne i komutatorowe. Silniki
indukcyjne (asynchroniczne) są najbardziej rozpowszechnione .
Najtańsze i najczęściej stosowane są odznaczające się najprostszą
budową silniki indukcyjne klatkowe (zwarte); Synchroniczne różnią
się od silników elektrycznych indukcyjnych budową wirnika, który jest
wyposażony dodatkowo w elektromagnesy zasilane prądem stałym ze
wzbudnicy osadzonej na wale wirnika; liczba biegunów
elektromagnesów odpowiada liczbie biegunów pola wirującego
stojana; ponieważ moment obrotowy jest wynikiem wzajemnego
oddziaływania na siebie biegunów magnetycznych elektromagnesów i
pola wirującego, obroty wirnika są synchroniczne z obrotami pola i
mają stałą prędkość. Stosowane są do napędzania maszyn
szybkoobrotowych o stałej prędkości obrotowej, np. sprężarek.
Komutatorowe (szeregowe i równoległe) mają wirnik z komutatorem,
do którego doprowadza się prąd przemienny za pomocą szczotek.
Elektryczne uniwersalne, które mogą być zasilane prądem stałym
lub przemiennym; stosowane do napędzania sprzętu gospodarstwa
domowego, maszyn biurowych itp. Silnik liniowy, przetwarza energię
elektryczną bezpośrednio na energię ruchu postępowego; składa się
z induktora i bieżnika, które są odpowiednikami stojana i wirnika, lecz
rozwiniętymi w linię prostą.
I. Silniki skokowe (inaczej krokowe)
Silnik krokowy przekształca impulsy elektryczne w dyskretne ruchy
mechaniczne. Oś silnika obraca się o niewielkie przyrosty kąta pod
wpływem impulsów elektrycznych, podawanych w odpowiedniej
kolejności. Obroty silnika są związane bezpośrednio z podawanymi
impulsami na kilka sposobów. Kierunek obrotów osi jest ściśle
związany z sekwencją podawanych impulsów, prędkość obrotów
zależy od częstotliwości tych impulsów, a kąt obrotu - od ich ilości.
Częste zastosowanie silników krokowych można zaobserwować w
automatyce przemysłowej.
rodzaje silników krokowych:
-Silnik reluktancyjny składa się z
rotora o wielu zębach wykonanego z
miękkiej stali i uzwojonego stojana.
Kiedy uzwojenia stojana są zasilane
prądem stałym, bieguny
namagnesowują się. Ruch pojawia się
na skutek przyciągania zębów rotora
przez zasilane bieguny stojana.
Linie pola magnetycznego wykazują
dążenie do zamknięcia się w obwodzie
o najmniejszej reluktancji. W ten sposób
powstaje moment obrotowy, który dąży
do ustawienia wirnika w położeniu q = 0.
Strumień w obwodzie
magnetycznym opisany jest
wzorem
kąt_fi=I
z
/ R
m
i jest funkcją przepływu I
z
oraz reluktancji
Zasada działania silnika skokowego o wirniku reluktancyjnym
Na rysunku wyżej są trzy takty pracy tego silnika. Kiedy prąd pojawi
się w paśmie 1-1, wirnik zajmie położenie pokazane w A) Gdy w
następnej chwili nastąpi jednoczesne zasilenie pasm 1-1 i 2-2,
wówczas wirnik zajmie położenie odpowiadające największej
permeancji dla strumienia wytworzonego przez przepływy obu
uzwojeń. Następnie w paśmie 1-1 nie ma już prądu i wirnik
znajduje się w położeniu pokazanym na
C) Komutacja silnika przebieg w następującej kolejności :
-SILNIK o magnesach trwałych ( czynny ) - silnik skokowy o wirniku
wytwarzającym strumień
magnetyczny i o stojanie z
uzwojeniem sterującym.
Wirnik silnika stanowią
magnesy trwałe . Na stojanie
znajdują się bieguny wydatne,
na których umieszczone są
pasma uzwojenia 1-1 i 2-2.
Do pasm 1-1 i 2-2 uzwojenia
sterującego podawane są
impulsy . Pod wpływem wytworzonego momentu synchronizującego
po każdym impulsie wirnik obraca się o kąt skoku. Wytworzenie
momentu synchronizującego odbywa się na podobnej zasadzie
jak w zwyczajnym silniku synchronicznym. Tak więc kolejność
przełączania ( komutacji ) pasm 1-1 i 2-2 uzwojenia sterującego
przedstawia wykres przebiegu napięć pasmowych w funkcji czasu.
Każdemu impulsowi odpowiada określone położenie wirnika silnika:
położenie A) odpowiada pierwszemu impulsowi, położenie B) –
drugiemu, C) – trzeciemu impulsowi napięciowemu.
Silnik hybrydowy jest bardziej kosztowny niż silnik z magnesem
trwałym, ale ma lepsze parametry jeśli
chodzi o rozdzielczość, moment i
szybkość. Typowe kąty silnika
hybrydowego mieszczą sie w zakresie
3,6° - 0,9° (100 - 400 kroków na obrót).
Silnik hybrydowy łączy w sobie zalety
silnika ze zmienną reluktancją i silnika z
magnesem trwałym. Rotor ma wiele
zębów jak w silnikach VR i posiada osiowo namagnesowane
magnesy umieszczone koncentrycznie wokół osi. Żeby rotora
zapewniają lepszą drogę przepływowi magnetycznemu, co dalej
polepsza charakterystyki momentu spoczynkowego i dynamicznego w
porównaniu z silnikami VR i PM.
Dwa najczęściej używane typy silników krokowych to silniki z
magnesem trwałym i hybrydowe.
Schemat blokowy silnika skokowego:
Stany pracy silnika skokowego
W stanie statycznym, w uzwojeniach silnika skokowego występuje
prąd stały, wytwarzając nieruchome pole magnetyczne. Na wirnik
działa moment synchronizujący, który dąży do przywrócenia
początkowego położenia równowagi, naruszonego po zadziałaniu
momentu z zewnątrz.
Stan quasistatyczny występuje przy odpracowaniu pojedynczych
skoków; wirnik przed wykonaniem każdego skoku powinien osiągnąć
II.Silniki wykonawcze prądu stałego:
Silniki wykonawcze - elektromechaniczne przetworniki energii
pracujące w układach automatyki, przekształcające energię
elektryczną (sygnały elektryczne) w przemieszczenie kątowe wału,
jego prędkość (gdy są sterowane w sposób ciągły)oraz moment
obrotowy (często przy pracy w stanie zahamowanym) w sposób
jednoznaczny, najlepiej proporcjonalny.
Cechy silnika wykonawczego:
1. Liniowość charakterystyki mechanicznej n=f(M),
2. Liniowość charakterystyki regulacyjnej n=f(Us napięcie sterujące),
3. Samohamowność
4. Duża szybkość działania,
5. Duży moment rozruchowy,
6. Mała moc sterująca przy dużej mocy na wale
7. Małe wymiary i masa.
Uw - napięcie wzbudzenia
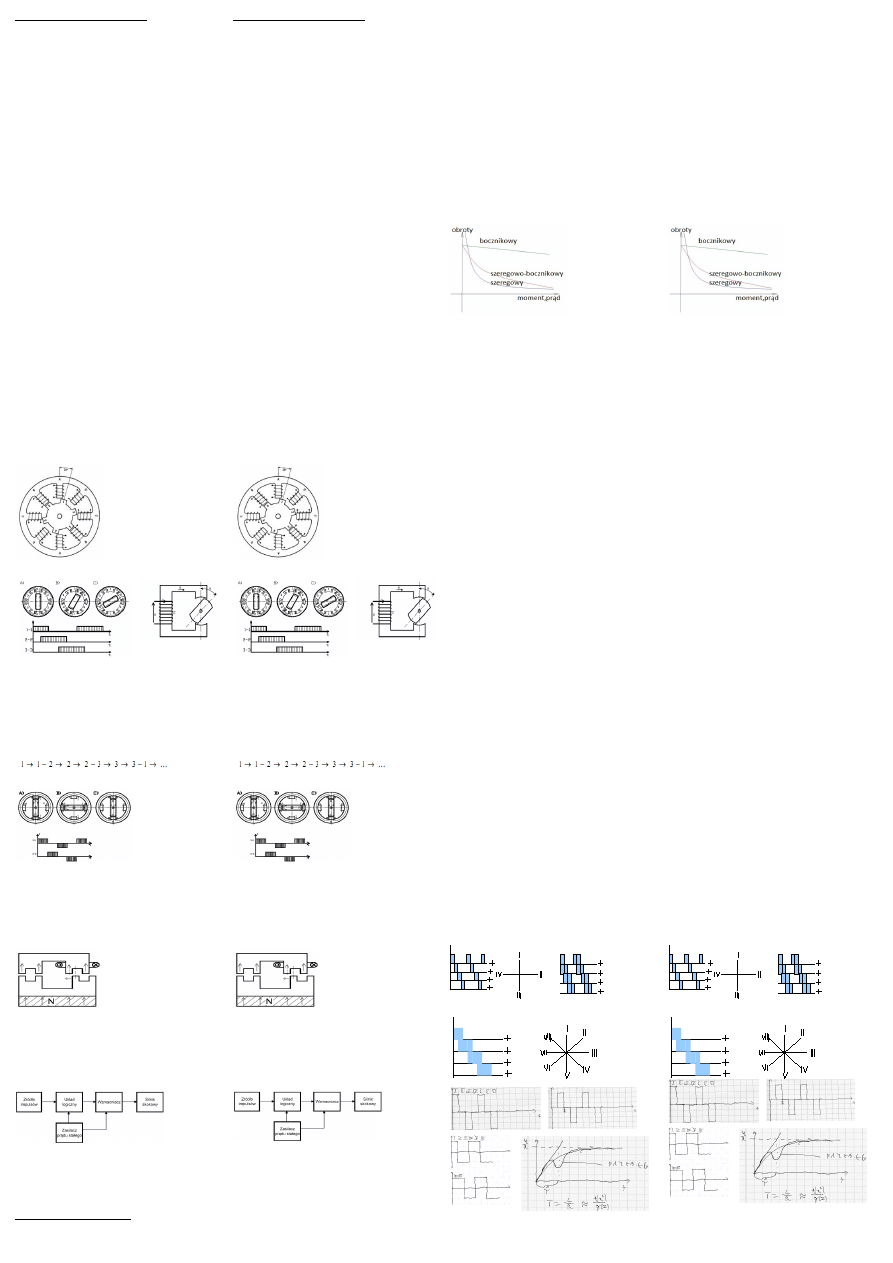
Przeważnie stosuje się silniki szeregowo-bocznikowe. Zaletą tych
silników jest stosunkowo duży moment rozruchowy (większy niż w
bocznikowym). Stosuje się też silniki bocznikowe, tam gdzie rozruch
jest łagodny np. w maszynach poligraficznych tłoczenie dostawiane
jest po uprzednim "rozpędzeniu" się maszyny. Szeregowe też się
stosuje, tam gdzie moment rozruchowy ma dużą wartość.
Odnośnie regulacji, wszystkie te silniki można łatwo regulować (po
przez zmianę wartości prądu w obwodzie wirnika).
Silniki prądu stałego są droższe w budowie niż asynchroniczne.
charakterystyki silników.
Budowa i sposób
funkcjonowania silników
wykonawczych:
stojan z magnesem trwałym;
wirnik z uzwojeniem twornika
– prostokątna ramka z drutu;
szczotki – doprowadzające
prąd do uzwojenia twornika;
komutator – pierścień ze
stykami – wyprowadzenia z
ramki (uzwojenia
twornika);wyjścia do zasilania.
Silnik elektryczny prądu stałego zbudowany jest z dwóch magnesów
zwróconych do siebie biegunami różnoimiennymi, tak aby pomiędzy
nimi znajdowało się pole magnetyczne. Pomiędzy magnesami
znajduje się przewodnik w kształcie ramki podłączony do źródła
prądu poprzez komutator i ślizgające się po nim szczotki. Przewodnik
zawieszony jest na osi, aby mógł się swobodnie obracać.
Na ramkę, w której płynie prąd elektryczny, działa para sił
elektrodynamicznych z powodu obecności pola magnetycznego. Siły
te powodują powstanie momentu obrotowego. Ramka wychyla się z
położenia poziomego, obracając się wokół osi. W wyniku swojej
bezwładności mija położenie pionowe (w którym moment obrotowy
jest równy zero a szczotki nie zasilają ramki). Po przejściu położenia
pionowego ramki, szczotki znów dotykają styków na komutatorze, ale
odwrotnie, prąd płynie w przeciwnym kierunku, dzięki czemu ramka w
dalszym ciągu jest obracana w tym samym kierunku.
Ze względu na sposób wzbudzenia pola magnetycznego dzielą się
na:
silnik prądu stałego obcowzbudny – silnik z magnesami trwałymi,
lub z elektromagnesami, t.j. z osobnym uzwojeniem wzbudzenia w
stojanie zasilanym z oddzielnego źródła zasilania niż obwód twornika
– stosowane głównie w napędach wymagających regulacji prędkości
w szerokim zakresie obrotów;
silnik prądu stałego samowzbudny – silniki z elektromagnesem w
stojanie mogą mieć połączone uzwojenia stojana i wirnika szeregowo,
równolegle (bocznikowo) lub w sposób mieszany. Sposób
podłączenia określa rodzaj silnika.
silnik szeregowy – o uzwojeniu wzbudzenia w stojanie połączonym
szeregowo z uzwojeniem twornika. Charakteryzuje się dużą
zależnością prędkości obrotowej od obciążenia. Zmniejszanie
obciążenie powoduje wzrost prędkości obrotowej (teoretycznie do
nieskończenie wielkiej) i grozi tzw. rozbieganiem, a w konsekwencji
zniszczeniem silnika. Jest to jego poważna wada. Dlatego tego typu
silników nie wolno włączać bez obciążenia. Stosowane są głównie w
trakcji elektrycznej (napędy lokomotyw, tramwajów, trolejbusów) i
pojazdach mechanicznych (wózki akumulatorowe, rozruszniki
samochodów), w napędach dźwigów, wentylatorów itp.
Silnik szeregowy może być, jako jedyny silnik prądu stałego, zasilany
również prądem przemiennym. Silniki takie zwane są też silnikami
uniwersalnymi. Możliwość ich różnego zasilania wynika z faktu, że
kierunek wirowania wirnika nie zależy od biegunowości przyłożonego
napięcia. W przypadku, gdy silnik ma być zasilany prądem stałym
stojan wykonywany jest z litego materiału. Natomiast przy zasilaniu
prądem przemiennym wykonuje się go z pakietu izolowanych blach
zmniejszając straty energii powstałe na skutek prądów wirowych. Ze
względu na stosunkowo małe wymiary przy stosunkowo dużej mocy
oraz duże prędkości obrotowe, silniki te znalazły liczne zastosowania
w urządzeniach wymagających dużych prędkości obrotowych napędu,
np. w odkurzaczach, elektronarzędziach, suszarkach, sokowirówkach,
mikserach itp.
silnik bocznikowy – o uzwojeniu wzbudzenia w stojanie
przyłączonym równolegle z uzwojeniem twornika. Charakteryzuje się
małą podatnością na zmianę prędkości obrotowej na skutek zmiany
obciążenia. Stosowany głównie w napędach obrabiarek, pomp,
dmuchaw, kompresorów;
silnik szeregowo-bocznikowy – o uzwojeniu wzbudzenia w stojanie
połączonym z uzwojeniem twornika w sposób mieszany (część
szeregowo, a część równolegle). Charakteryzuje się brakiem głównej
wady silnika szeregowego – możliwości jego rozbiegania przy braku
obciążenia, a także ma jego zalety – duży moment obrotowy w
szerokim zakresie obrotów i zależność prędkości obrotowej od
obciążenia. Stosowany jest zazwyczaj jako silniki dużych mocy, tam
gdzie występuje ciężki rozruch: do napędu walcarek, pras, dźwigów
oraz w napędach okrętowych mechanizmów pokładowych.
Bezszczotkowy silnik elektryczny – rodzaj silnika elektrycznego
zasilanego przez prąd stały, w którym zamiast szczotek zastosowano
elektrycznie sterowany komutator, cewki są nieruchome wewnątrz
obudowy, a magnesy znajdują się na wirniku. Ze względu na
niezawodność, oraz możliwość sterowania prędkości silniki są
stosowane w napędach dysków optycznych (CD, DVD, BD),
dyskach twardych, gramofonach, większości pojazdów o napędzie
elektrycznym (np. segway, samochodach hybrydowych), wszystkich
wentylatorach komputerowych i urządzeniach w których iskry
powstające na szczotkach mogłyby doprowadzić do zaprószenia
ognia czy wybuchu.
Komutacja ¼
I II III IV
takty komutacji
komutacje
I II III IV V VI VII VII I
KOMUTACJA przemiennobiegunowa
rzeczywisty
Silniki wykonawcze - elektromechaniczne przetworniki energii
pracujące w układach automatyki, przekształcające energię
elektryczną (sygnały elektryczne) w przemieszczenie kątowe wału,
jego prędkość (gdy są sterowane w sposób ciągły)oraz moment
obrotowy (często przy pracy w stanie zahamowanym) w sposób
jednoznaczny, najlepiej proporcjonalny.
Cechy silnika wykonawczego:
1. Liniowość charakterystyki mechanicznej n=f(M),
2. Liniowość charakterystyki regulacyjnej n=f(Us napięcie sterujące),
3. Samohamowność
4. Duża szybkość działania,
5. Duży moment rozruchowy,
6. Mała moc sterująca przy dużej mocy na wale
7. Małe wymiary i masa.
Uw - napięcie wzbudzenia
Przeważnie stosuje się silniki szeregowo-bocznikowe. Zaletą tych
silników jest stosunkowo duży moment rozruchowy (większy niż w
bocznikowym). Stosuje się też silniki bocznikowe, tam gdzie rozruch
jest łagodny np. w maszynach poligraficznych tłoczenie dostawiane
jest po uprzednim "rozpędzeniu" się maszyny. Szeregowe też się
stosuje, tam gdzie moment rozruchowy ma dużą wartość.
Odnośnie regulacji, wszystkie te silniki można łatwo regulować (po
przez zmianę wartości prądu w obwodzie wirnika).
Silniki prądu stałego są droższe w budowie niż asynchroniczne.
charakterystyki silników.
Budowa i sposób
funkcjonowania silników
wykonawczych:
stojan z magnesem trwałym;
wirnik z uzwojeniem twornika
– prostokątna ramka z drutu;
szczotki – doprowadzające
prąd do uzwojenia twornika;
komutator – pierścień ze
stykami – wyprowadzenia z
ramki (uzwojenia
twornika);wyjścia do zasilania.
Silnik elektryczny prądu stałego zbudowany jest z dwóch magnesów
zwróconych do siebie biegunami różnoimiennymi, tak aby pomiędzy
nimi znajdowało się pole magnetyczne. Pomiędzy magnesami
znajduje się przewodnik w kształcie ramki podłączony do źródła
prądu poprzez komutator i ślizgające się po nim szczotki. Przewodnik
zawieszony jest na osi, aby mógł się swobodnie obracać.
Na ramkę, w której płynie prąd elektryczny, działa para sił
elektrodynamicznych z powodu obecności pola magnetycznego. Siły
te powodują powstanie momentu obrotowego. Ramka wychyla się z
położenia poziomego, obracając się wokół osi. W wyniku swojej
bezwładności mija położenie pionowe (w którym moment obrotowy
jest równy zero a szczotki nie zasilają ramki). Po przejściu położenia
pionowego ramki, szczotki znów dotykają styków na komutatorze, ale
odwrotnie, prąd płynie w przeciwnym kierunku, dzięki czemu ramka w
dalszym ciągu jest obracana w tym samym kierunku.
Ze względu na sposób wzbudzenia pola magnetycznego dzielą się
na:
silnik prądu stałego obcowzbudny – silnik z magnesami trwałymi,
lub z elektromagnesami, t.j. z osobnym uzwojeniem wzbudzenia w
stojanie zasilanym z oddzielnego źródła zasilania niż obwód twornika
– stosowane głównie w napędach wymagających regulacji prędkości
w szerokim zakresie obrotów;
silnik prądu stałego samowzbudny – silniki z elektromagnesem w
stojanie mogą mieć połączone uzwojenia stojana i wirnika szeregowo,
równolegle (bocznikowo) lub w sposób mieszany. Sposób
podłączenia określa rodzaj silnika.
silnik szeregowy – o uzwojeniu wzbudzenia w stojanie połączonym
szeregowo z uzwojeniem twornika. Charakteryzuje się dużą
zależnością prędkości obrotowej od obciążenia. Zmniejszanie
obciążenie powoduje wzrost prędkości obrotowej (teoretycznie do
nieskończenie wielkiej) i grozi tzw. rozbieganiem, a w konsekwencji
zniszczeniem silnika. Jest to jego poważna wada. Dlatego tego typu
silników nie wolno włączać bez obciążenia. Stosowane są głównie w
trakcji elektrycznej (napędy lokomotyw, tramwajów, trolejbusów) i
pojazdach mechanicznych (wózki akumulatorowe, rozruszniki
samochodów), w napędach dźwigów, wentylatorów itp.
Silnik szeregowy może być, jako jedyny silnik prądu stałego, zasilany
również prądem przemiennym. Silniki takie zwane są też silnikami
uniwersalnymi. Możliwość ich różnego zasilania wynika z faktu, że
kierunek wirowania wirnika nie zależy od biegunowości przyłożonego
napięcia. W przypadku, gdy silnik ma być zasilany prądem stałym
stojan wykonywany jest z litego materiału. Natomiast przy zasilaniu
prądem przemiennym wykonuje się go z pakietu izolowanych blach
zmniejszając straty energii powstałe na skutek prądów wirowych. Ze
względu na stosunkowo małe wymiary przy stosunkowo dużej mocy
oraz duże prędkości obrotowe, silniki te znalazły liczne zastosowania
w urządzeniach wymagających dużych prędkości obrotowych napędu,
np. w odkurzaczach, elektronarzędziach, suszarkach, sokowirówkach,
mikserach itp.
silnik bocznikowy – o uzwojeniu wzbudzenia w stojanie
przyłączonym równolegle z uzwojeniem twornika. Charakteryzuje się
małą podatnością na zmianę prędkości obrotowej na skutek zmiany
obciążenia. Stosowany głównie w napędach obrabiarek, pomp,
dmuchaw, kompresorów;
silnik szeregowo-bocznikowy – o uzwojeniu wzbudzenia w stojanie
połączonym z uzwojeniem twornika w sposób mieszany (część
szeregowo, a część równolegle). Charakteryzuje się brakiem głównej
wady silnika szeregowego – możliwości jego rozbiegania przy braku
obciążenia, a także ma jego zalety – duży moment obrotowy w
szerokim zakresie obrotów i zależność prędkości obrotowej od
obciążenia. Stosowany jest zazwyczaj jako silniki dużych mocy, tam
gdzie występuje ciężki rozruch: do napędu walcarek, pras, dźwigów
oraz w napędach okrętowych mechanizmów pokładowych.
Bezszczotkowy silnik elektryczny – rodzaj silnika elektrycznego
zasilanego przez prąd stały, w którym zamiast szczotek zastosowano
elektrycznie sterowany komutator, cewki są nieruchome wewnątrz
obudowy, a magnesy znajdują się na wirniku. Ze względu na
niezawodność, oraz możliwość sterowania prędkości silniki są
stosowane w napędach dysków optycznych (CD, DVD, BD),
dyskach twardych, gramofonach, większości pojazdów o napędzie
elektrycznym (np. segway, samochodach hybrydowych), wszystkich
wentylatorach komputerowych i urządzeniach w których iskry
powstające na szczotkach mogłyby doprowadzić do zaprószenia
ognia czy wybuchu.
Komutacja ¼
I II III IV
takty komutacji
komutacje
I II III IV V VI VII VII I
KOMUTACJA
przemiennobiegunowa
rzeczywisty
Układy sterowania:
PRAWO COULOMBA
F=1/4pi*e0 * q1q2/r^2
SIŁA ELEKTRODYNAMICZNA
F=q(u x B); u-prędkość, B-wektor indukcji
Siła Lorenza:
F=q*u*B*sin(alfa)
Na ładunki poruszające się w polu magnetycznym działa siła Lorenza.
B=Fmax/qv [Tesla=N/A*m]
Prawo ???
wokół ładunku, przewodnika z prądem powstaje pole magnetyczne
-indukcja B w praktyce jest styczna do okręgu
Prawo Bioto-Severta?
-wartość ??? prądu jest zależna od indukcji dB
dB=u0i/4x * dlu/r
TAKT KOMUTACJI-określa liczbę pasm dołączania do zasilania
CYKL KOMUTACJI-liczbę niezależnych taktów komutacji
Podział komutacji:
ze względu na żródło zasilania: napięciowa, prądowa
-ze względu na kierunek prądu: unipolarne-prąd w trakcie cyklu
płynie w jednym kierunku; bipolarna(przemiennobiegunowa)-prąd
w trakcie cyklu w różnych kierunkach; symetryczna-w każdym
takcie do źródła zasilania jest dołączana jednakowa liczba pasm;
niesymetryczna-odwrotność symetr., różna liczba pasm
U=iR+Ldi/dt
i=(U/R * (1-e^(-t/T))+i o e^(-t/T)) /T*L/P
Im więcej zwojów tym większa stała
czasowa. Małą rezystancja-mała liczba
zwojów
Im
większe
Uf tym szybciej prąd sięga pożądaną wartość. Uf-napięcie forsujące.
Jeśli prąd przemienny U/R to Uf=0
Jeśli duży U/R to ???
Im większa stała czasu t tym kąt będzie się szybciej przemieszczał.
aby poprawić dynamikę:
-dodatkowa rezystancja
D'-dodatkowy rezystor
im większe RD' tym
większa stała czasowa.
Uce=Uz+deltaUr0
-Dioda Zenera :
-Dwojenie
-tani ale ma dużo wad
symetryczny
Rozwiązanie dla silnika otwartego -tanie
Ui=i^2R + i^2dl/dt + Lidi/dt + &i*ku(fi)
indukcyjność zależy od drogi kątowej
-1 punkt
równowagi-
wiruje WRACA
do swego
położenia 1 -
pkt równowagi
stabilnej
-2ptk musi być
równo staje,
ale
jakiekolwiek
zakłócenie
powoduje powrót do punktu równowagi stabilnej
jeśli pochodna ujemna to pkt równowagi stabilnej
jeśli pochodna>0 to niestabilna
- jeżeli pochodna ujemna to pkt równowagi również stabliej...
- jeżeli pochodna>0 to nie stab..
- każde pasmo ma osobną charakterystykę kątową
jest w stanie..
skutki asylacji są widoczne do samego końca
Silnik 3 pasmowy ma gorsze
Im mniejszy moment bezwładności tym wolniej
silnik neokonwencyjny (wirnik biozny)
- 2 zewnątrz wynmawy ruch obrotowy
- moment w połażeniu o+0 stopni jest równy zero.
żeby się przyciągały z jednakową siłą
- po 180st powtórzenie sytuacji?
- zwrot prądu nie ma znaczenia
2.
wirnik szym...
- zwrot prądu ma znaczenie (N.S) N-Przyciągany; S-Odpychany
- wirnik wróci do swojego położenia gdy nie będziemy obliczać z
zewnątrz okres momentu 2x wolniej niż zmienna
(moment redundancyjny)
droga między kolejnymi przałą....
Układy sterowania:
PRAWO COULOMBA
F=1/4pi*e0 * q1q2/r^2
SIŁA ELEKTRODYNAMICZNA
F=q(u x B); u-prędkość, B-wektor indukcji
Siła Lorenza:
F=q*u*B*sin(alfa)
Na ładunki poruszające się w polu magnetycznym działa siła Lorenza.
B=Fmax/qv [Tesla=N/A*m]
Prawo ???
wokół ładunku, przewodnika z prądem powstaje pole magnetyczne
-indukcja B w praktyce jest styczna do okręgu
Prawo Bioto-Severta?
-wartość ??? prądu jest zależna od indukcji dB
dB=u0i/4x * dlu/r
TAKT KOMUTACJI-określa liczbę pasm dołączania do zasilania
CYKL KOMUTACJI-liczbę niezależnych taktów komutacji
Podział komutacji:
ze względu na żródło zasilania: napięciowa, prądowa
-ze względu na kierunek prądu: unipolarne-prąd w trakcie cyklu
płynie w jednym kierunku; bipolarna(przemiennobiegunowa)-prąd
w trakcie cyklu w różnych kierunkach; symetryczna-w każdym
takcie do źródła zasilania jest dołączana jednakowa liczba pasm;
niesymetryczna-odwrotność symetr., różna liczba pasm
U=iR+Ldi/dt
i=(U/R * (1-e^(-t/T))+i o e^(-t/T)) /T*L/P
Im więcej zwojów tym większa stała
czasowa. Małą rezystancja-mała liczba
zwojów
Im
większe
Uf tym szybciej prąd sięga pożądaną wartość. Uf-napięcie forsujące.
Jeśli prąd przemienny U/R to Uf=0
Jeśli duży U/R to ???
Im większa stała czasu t tym kąt będzie się szybciej przemieszczał.
aby poprawić dynamikę:
-dodatkowa rezystancja
D'-dodatkowy rezystor
im większe RD' tym
większa stała czasowa.
Uce=Uz+deltaUr0
-Dioda Zenera :
-Dwojenie
-tani ale ma dużo wad
symetryczny
Rozwiązanie dla silnika otwartego -tanie
Ui=i^2R + i^2dl/dt + Lidi/dt + &i*ku(fi)
indukcyjność zależy od drogi kątowej
-1 punkt
równowagi-
wiruje WRACA
do swego
położenia 1 -
pkt równowagi
stabilnej
-2ptk musi być
równo staje,
ale
jakiekolwiek
zakłócenie
powoduje powrót do punktu równowagi stabilnej
jeśli pochodna ujemna to pkt równowagi stabilnej
jeśli pochodna>0 to niestabilna
- jeżeli pochodna ujemna to pkt równowagi również stabliej...
- jeżeli pochodna>0 to nie stab..
- każde pasmo ma osobną charakterystykę kątową
jest w stanie..
skutki asylacji są widoczne do samego końca
Silnik 3 pasmowy ma gorsze
Im mniejszy moment bezwładności tym wolniej
silnik neokonwencyjny (wirnik biozny)
- 2 zewnątrz wynmawy ruch obrotowy
- moment w połażeniu o+0 stopni jest równy zero.
żeby się przyciągały z jednakową siłą
- po 180st powtórzenie sytuacji?
- zwrot prądu nie ma znaczenia
2.
wirnik szym...
- zwrot prądu ma znaczenie (N.S) N-Przyciągany; S-Odpychany
- wirnik wróci do swojego położenia gdy nie będziemy obliczać z
zewnątrz okres momentu 2x wolniej niż zmienna
(moment redundancyjny)
droga między kolejnymi przałą....
położenie nieruchome. Silnik przechodzi z jednego położenia
ustalonego w drugie.
W stanie ustalonym ( przy pracy kinematycznej ) silnik pracuje ze
stałą częstotliwością impulsów sterujących, która jest większa od
częstotliwości przy pracy quasistatycznej.
Stan dynamiczny jest zasadniczym stanem pracy silnika
skokowego. Stan ten zawiera: rozruch, hamowanie, nawrot,
przejście od jednej częstotliwości do drugiej.
Sterowanie silników skokowych
Komutacja symetryczna i niesymetryczna silnika skokowego
Silnik skokowy przetwarza ciąg sterujących impulsów
elektrycznych na ciąg kątowych przemieszczeń wału wokół jego osi.
Jest to więc silnik o działaniu dyskretnym. Silnik skokowy nie może
pracować bez elektronicznego układu sterowania. Pojęcie małej,
średniej, czy dużej częstotliwości pracy silnika skokowego wynika
z charakterystycznych rodzajów jego pracy. Prędkość obrotowa (min-
1) szybkiego silnika skokowego może być obliczona ze wzoru:
n=60/360 alfa*f gdzie: alfa – wartość skoku; f – częstotliwość pracy
silnika, równa liczbie impulsów na sekundę.
<-Komutacja
symetryczna silnika
skokowego rys. 1.12
Komutacja
niesymetryczna silnika
skokowego rys.1.13
W celu uproszczenia
rysunków na każdym z nich
pokazano tylko to pasmo
uzwojenia, które w danej
chwili jest zasilane
impulsem prądowym. Jak
widać z rysunku 1.12 kąt
skoku wynosi 90. Ten sam silnik, zasilany impulsami według
sekwencji przedstawionej na rysunku 1.13a, wykonuje pracę
półskokową. W położeniach przedstawionych na rysunku 1.13c,e,
impulsy prądowe są jednocześnie podawane na wszystkie pasma
uzwojenia i w rezultacie działania wytworzonego pola
magnetycznego wirnik zatrzymuje się w położeniu pośrednim, po
przemieszczeniu o kąt skoku wynoszący 45. Tego rodzaju
komutację nazwano niesymetryczną. Przez odpowiednie
zaprojektowanie układu sterowania można również uzyskać pracę
miniskokową, polegającą na tym, że silnik wykonuje w granicach
jednego skoku bazowego pewną liczbę miniskoków o bardzo małej
wartości ( rzędu setnych, a nawet tysięcznych części stopnia ).
Rys.1.14.
Sterowanie
silników
skokowych a)
bipolarne, b)
unipolarne
Zaletą
sterowania
bipolarnego jest dobre wykorzystanie momentu obrotowego dzięki
temu, że całe uzwojenie jest w stanie prądowym po otrzymaniu
impulsu. Wadą jest to, że zapewnienie przeciwnego zwrotu prądu
w uzwojeniu wymaga aż ośmiu tranzystorów w sterowniku silnika,
przez co cały układ staje się bardziej kosztowny. Zaletą wariantu
unipolarnego jest prostszy układ połączeń i mniejsza liczba
tranzystorów, wadą zaś to, że jednocześnie pracuje tylko połowa
uzwojenia, a zatem nie wytwarza się moment obrotowy o pełnej
wartości. W reluktancyjnych stosuje się sterowanie unipolarne.
W przeciwieństwie do silników hybrydowych czy też klasycznych
z magnesami jego uzwojenia są połączone w gwiazdę.
Wykorzystywane jest całe uzwojenie silnika a nie jego połowa. Inną
korzyścią wynikającą ze sterowania bipolarnego lub unipolarnego
jest możliwość zmniejszania wartości skoku silnika. Przez
odpowiednie przełączenie uzyskuje się pracę: pełnoskokową,
półskokową lub ćwierćskokową.
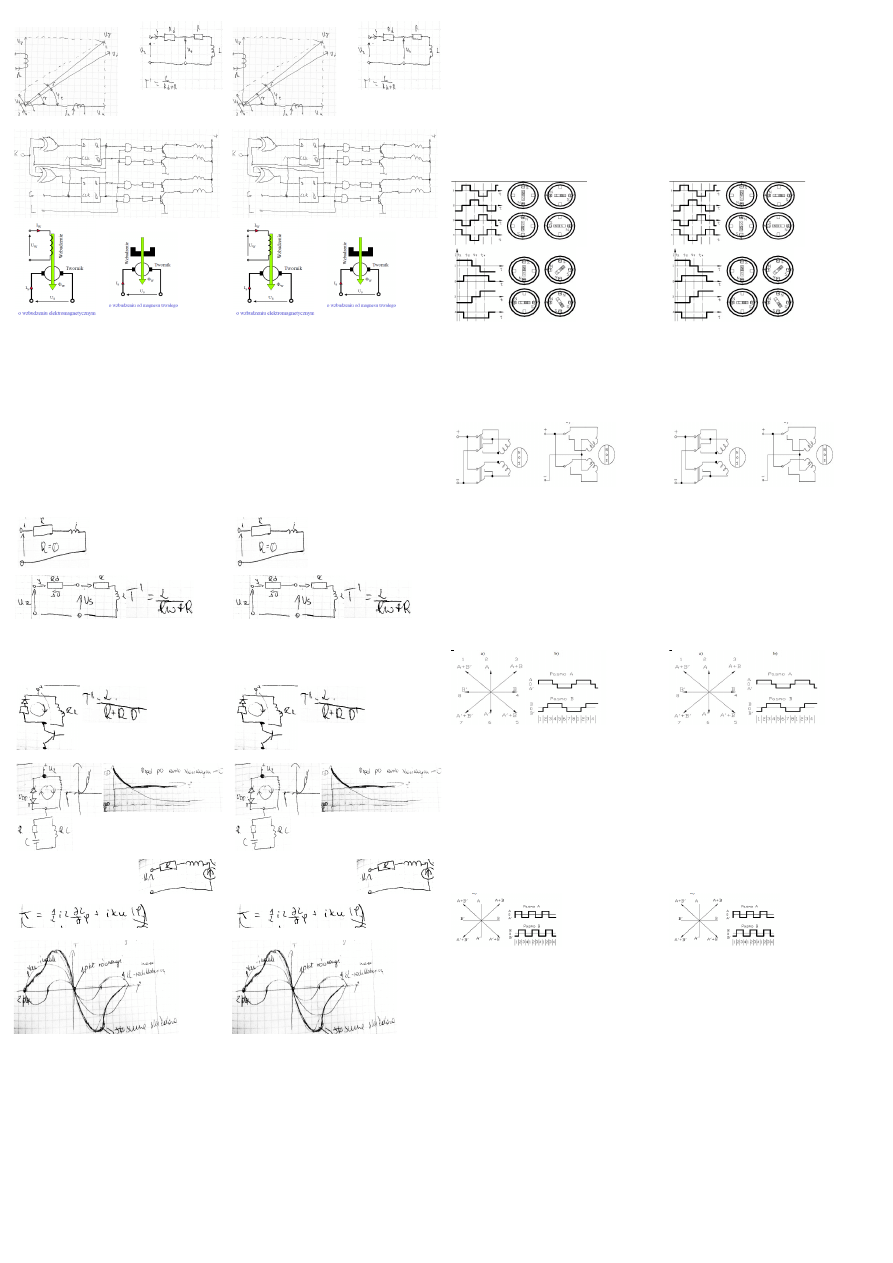
Aby otrzymać pracę pełnoskokową przyłącza się na przemian
dodatnie i ujemne impulsy prądowe do pasm dwupasmowego silnika
skokowego, sterowanego bipolarnie. Pełny obrót wirnika składa się z
czterech skoków.
Rys.1.15.
Sterowanie
bipolarne przy
pracy
pełnokrokowej
silnika
skokowego
Współrzędna A
oznacza prąd
dodatni,
natomiast A’ ujemny w pasmie A. To samo dotyczy współrzędnych B-
B’ w pasmie B. Wektory na wykresie wskazują położenia wirnika przy
pracy pełnoskokowej. W położeniu 1 pasmo A jest zasilane prądem
dodatnim, B zaś ujemnym. W następnym skoku ( położenie 2 na
wykresie wektorowym ) w obu pasmach występuje prąd dodatni
(A+B). Kiedy pasmo A jest zasilane prądem ujemnym, pasmo 2 zaś
dodatnim (A’+B), wtedy wirnik przemieszcza się ponownie o kąt
90, osiągając położenie 3. W czwartym skoku oba uzwojenia są
zasilane prądami ujemnymi (A’+B’) i wówczas sekwencja
powtarza się. Rysunek 1.15b. pokazuje sposób zasilania impulsami
pasm dwupasmowego silnika skokowego, sterowanego bipolarnie,
przy pracy pełnoskokowej.
W odróżnieniu od pracy pełnoskokowej, kiedy oba uzwojenia są
zasilane, przy pracy półskokowej (1/2 skokowej ) jedno z uzwojeń
znajduje się w stanie bezprądowym co drugi skok (rysunek 1.16b). To
powoduje, że silnik wykonuje ruch tylko o pół skoku, jak to wynika z
wykresu wektorowego na rysunku 1.16a. W położeniach 2,4,6 i 8 tylko
jedno pasmo jest zasilane. Jeden pełny obrót wirnika przy pracy
półskokowej składa się z ośmiu skoków, tj. dwukrotnie więcej aniżeli
przy pracy pełnoskokowej. Oczywiście wartość skoku zmniejsza
się o połowę i wynosi 45.
rys. 116 sterowanie przy pracy
półskokowej
Wibracje i rezonans, które
pojawiają się przy
przyspieszaniu, opóźnianiu lub
zatrzymywaniu silnika, są
znacznie ograniczone przy pracy półskokowej. Wadą tego sposobu
sterowania jest nieco mniejszy moment statyczny, występujący co
drugi skok, gdyż wówczas tylko jedno pasmo jest wzbudzane.
Wyrażono to na wykresie wektorowym (rysunek 1.16a)
przedstawiając wektory A, B, A’, B’ jako krótsze niż A+B, A’+B, A’+B’,
A+B’. Praca ćwierćskokowa ( ¼ skokowa ) umożliwia zajmowanie
przez wirnik położenia pośredniego pomiędzy dwoma położeniami
półskokowymi, dzięki możliwości zasilania całego pasma i połowy
drugiego, co jest możliwe ( jak to wynika z rysunku 1.14b ) przy
sterowaniu unipolarnym. Jest to widoczne na wykresie
wektorowym przy pracy ćwierćskokowej co pokazano na rysunku
1.17a. w położeniach 2,4,6,8,10,12,14 i 16. Odpowiednie przebiegi
prądowe dla pracy ¼ skokowej przedstawiono na rysunku 1.17b
Pełny obrót wirnika składa się z 16 skoków. Przy pracy ¼ skokowej
następuje dalsze ograniczenie rezonansu. Praca miniskokową
uzyskuje się poprzez dalszy podział poziomów prądu. Z założenia
ten rodzaj sterowania musi wykorzystywać sterowanie prądowe.
Teoretycznie liczba skoków (miniskoków) jest nieograniczona, ale
w praktyce trzy czynniki ograniczają dopuszczalną liczbę poziomów
pośrednich. Pierwszym z nich jest tarcie statyczne. Drugi z nich
wynika z niesinusoidalnego charakteru wytwarzanego momentu.
Trzeci związany jest z samym sposobem regulacji prądu.
Regulowana wartość prądu nigdy nie jest stała a jedynie
oscyluje wokół wartości prądu odniesienia.
Głównymi elementami układu sterowania silnika skokowego są:
- źródło impulsów, którym może być generator impulsów,
maszyna cyfrowa, mikroprocesor, przetwornik sygnału ciągłego na
impulsowy lub pamięć operacyjna;
- układ logiczny zawiera układ formowania impulsów na
prostokątne oraz układ rozdzielania impulsów na poszczególne
pasma uzwojenia silnika ( licznik).
- wzmacniacz jest stopniem wyjściowym mocy, który jest
wykonany na tranzystorach o układzie analogicznym dla każdego
pasma uzwojenia;
- zasilacz prądu stałego.
położenie nieruchome. Silnik przechodzi z jednego położenia
ustalonego w drugie.
W stanie ustalonym ( przy pracy kinematycznej ) silnik pracuje ze
stałą częstotliwością impulsów sterujących, która jest większa od
częstotliwości przy pracy quasistatycznej.
Stan dynamiczny jest zasadniczym stanem pracy silnika
skokowego. Stan ten zawiera: rozruch, hamowanie, nawrot,
przejście od jednej częstotliwości do drugiej.
Sterowanie silników skokowych
Komutacja symetryczna i niesymetryczna silnika skokowego
Silnik skokowy przetwarza ciąg sterujących impulsów
elektrycznych na ciąg kątowych przemieszczeń wału wokół jego osi.
Jest to więc silnik o działaniu dyskretnym. Silnik skokowy nie może
pracować bez elektronicznego układu sterowania. Pojęcie małej,
średniej, czy dużej częstotliwości pracy silnika skokowego wynika
z charakterystycznych rodzajów jego pracy. Prędkość obrotowa (min-
1) szybkiego silnika skokowego może być obliczona ze wzoru:
n=60/360 alfa*f gdzie: alfa – wartość skoku; f – częstotliwość pracy
silnika, równa liczbie impulsów na sekundę.
<-Komutacja
symetryczna silnika
skokowego rys. 1.12
Komutacja
niesymetryczna silnika
skokowego rys.1.13
W celu uproszczenia
rysunków na każdym z nich
pokazano tylko to pasmo
uzwojenia, które w danej
chwili jest zasilane
impulsem prądowym. Jak
widać z rysunku 1.12 kąt
skoku wynosi 90. Ten sam silnik, zasilany impulsami według
sekwencji przedstawionej na rysunku 1.13a, wykonuje pracę
półskokową. W położeniach przedstawionych na rysunku 1.13c,e,
impulsy prądowe są jednocześnie podawane na wszystkie pasma
uzwojenia i w rezultacie działania wytworzonego pola
magnetycznego wirnik zatrzymuje się w położeniu pośrednim, po
przemieszczeniu o kąt skoku wynoszący 45. Tego rodzaju
komutację nazwano niesymetryczną. Przez odpowiednie
zaprojektowanie układu sterowania można również uzyskać pracę
miniskokową, polegającą na tym, że silnik wykonuje w granicach
jednego skoku bazowego pewną liczbę miniskoków o bardzo małej
wartości ( rzędu setnych, a nawet tysięcznych części stopnia ).
Rys.1.14.
Sterowanie
silników
skokowych a)
bipolarne, b)
unipolarne
Zaletą
sterowania
bipolarnego jest dobre wykorzystanie momentu obrotowego dzięki
temu, że całe uzwojenie jest w stanie prądowym po otrzymaniu
impulsu. Wadą jest to, że zapewnienie przeciwnego zwrotu prądu
w uzwojeniu wymaga aż ośmiu tranzystorów w sterowniku silnika,
przez co cały układ staje się bardziej kosztowny. Zaletą wariantu
unipolarnego jest prostszy układ połączeń i mniejsza liczba
tranzystorów, wadą zaś to, że jednocześnie pracuje tylko połowa
uzwojenia, a zatem nie wytwarza się moment obrotowy o pełnej
wartości. W reluktancyjnych stosuje się sterowanie unipolarne.
W przeciwieństwie do silników hybrydowych czy też klasycznych
z magnesami jego uzwojenia są połączone w gwiazdę.
Wykorzystywane jest całe uzwojenie silnika a nie jego połowa. Inną
korzyścią wynikającą ze sterowania bipolarnego lub unipolarnego
jest możliwość zmniejszania wartości skoku silnika. Przez
odpowiednie przełączenie uzyskuje się pracę: pełnoskokową,
półskokową lub ćwierćskokową.
Aby otrzymać pracę pełnoskokową przyłącza się na przemian
dodatnie i ujemne impulsy prądowe do pasm dwupasmowego silnika
skokowego, sterowanego bipolarnie. Pełny obrót wirnika składa się z
czterech skoków.
Rys.1.15.
Sterowanie
bipolarne przy
pracy
pełnokrokowej
silnika
skokowego
Współrzędna A
oznacza prąd
dodatni,
natomiast A’ ujemny w pasmie A. To samo dotyczy współrzędnych B-
B’ w pasmie B. Wektory na wykresie wskazują położenia wirnika przy
pracy pełnoskokowej. W położeniu 1 pasmo A jest zasilane prądem
dodatnim, B zaś ujemnym. W następnym skoku ( położenie 2 na
wykresie wektorowym ) w obu pasmach występuje prąd dodatni
(A+B). Kiedy pasmo A jest zasilane prądem ujemnym, pasmo 2 zaś
dodatnim (A’+B), wtedy wirnik przemieszcza się ponownie o kąt
90, osiągając położenie 3. W czwartym skoku oba uzwojenia są
zasilane prądami ujemnymi (A’+B’) i wówczas sekwencja
powtarza się. Rysunek 1.15b. pokazuje sposób zasilania impulsami
pasm dwupasmowego silnika skokowego, sterowanego bipolarnie,
przy pracy pełnoskokowej.
W odróżnieniu od pracy pełnoskokowej, kiedy oba uzwojenia są
zasilane, przy pracy półskokowej (1/2 skokowej ) jedno z uzwojeń
znajduje się w stanie bezprądowym co drugi skok (rysunek 1.16b). To
powoduje, że silnik wykonuje ruch tylko o pół skoku, jak to wynika z
wykresu wektorowego na rysunku 1.16a. W położeniach 2,4,6 i 8 tylko
jedno pasmo jest zasilane. Jeden pełny obrót wirnika przy pracy
półskokowej składa się z ośmiu skoków, tj. dwukrotnie więcej aniżeli
przy pracy pełnoskokowej. Oczywiście wartość skoku zmniejsza
się o połowę i wynosi 45.
rys. 116 sterowanie przy pracy
półskokowej
Wibracje i rezonans, które
pojawiają się przy
przyspieszaniu, opóźnianiu lub
zatrzymywaniu silnika, są
znacznie ograniczone przy pracy półskokowej. Wadą tego sposobu
sterowania jest nieco mniejszy moment statyczny, występujący co
drugi skok, gdyż wówczas tylko jedno pasmo jest wzbudzane.
Wyrażono to na wykresie wektorowym (rysunek 1.16a)
przedstawiając wektory A, B, A’, B’ jako krótsze niż A+B, A’+B, A’+B’,
A+B’. Praca ćwierćskokowa ( ¼ skokowa ) umożliwia zajmowanie
przez wirnik położenia pośredniego pomiędzy dwoma położeniami
półskokowymi, dzięki możliwości zasilania całego pasma i połowy
drugiego, co jest możliwe ( jak to wynika z rysunku 1.14b ) przy
sterowaniu unipolarnym. Jest to widoczne na wykresie
wektorowym przy pracy ćwierćskokowej co pokazano na rysunku
1.17a. w położeniach 2,4,6,8,10,12,14 i 16. Odpowiednie przebiegi
prądowe dla pracy ¼ skokowej przedstawiono na rysunku 1.17b
Pełny obrót wirnika składa się z 16 skoków. Przy pracy ¼ skokowej
następuje dalsze ograniczenie rezonansu. Praca miniskokową
uzyskuje się poprzez dalszy podział poziomów prądu. Z założenia
ten rodzaj sterowania musi wykorzystywać sterowanie prądowe.
Teoretycznie liczba skoków (miniskoków) jest nieograniczona, ale
w praktyce trzy czynniki ograniczają dopuszczalną liczbę poziomów
pośrednich. Pierwszym z nich jest tarcie statyczne. Drugi z nich
wynika z niesinusoidalnego charakteru wytwarzanego momentu.
Trzeci związany jest z samym sposobem regulacji prądu.
Regulowana wartość prądu nigdy nie jest stała a jedynie
oscyluje wokół wartości prądu odniesienia.
Głównymi elementami układu sterowania silnika skokowego są:
- źródło impulsów, którym może być generator impulsów,
maszyna cyfrowa, mikroprocesor, przetwornik sygnału ciągłego na
impulsowy lub pamięć operacyjna;
- układ logiczny zawiera układ formowania impulsów na
prostokątne oraz układ rozdzielania impulsów na poszczególne
pasma uzwojenia silnika ( licznik).
- wzmacniacz jest stopniem wyjściowym mocy, który jest
wykonany na tranzystorach o układzie analogicznym dla każdego
pasma uzwojenia;
- zasilacz prądu stałego.

Wyszukiwarka
Podobne podstrony:
poprawiona sciaga MwSK
Grunt budowlany poprawiony sciaga, AGH, PKM, 6 semestr, mechanika gruntów i skal
EKONOMI1-poprawka-ściaga, EKONOMIA
egzamin wytzrymalosc materialow poprawiony ściąga pdf
adm. poprawa ściąga, Administracja-notatki WSPol, prawo administracyjne
Enzymologia poprawiona sciaga, Biotechnologia środowiska, PŁ, BiNoŻ, studia mgr II stopnia, Semestr
tc2 poprawa sciaga
poprawinona ściąga do historii
16 zestawow poprawionych SCIAGA!!
poprawiona sciaga
ściągawka lekko poprawiona
ściąga poprawna
Twf sciąga poprawiona
Ściąga poprawiona
więcej podobnych podstron