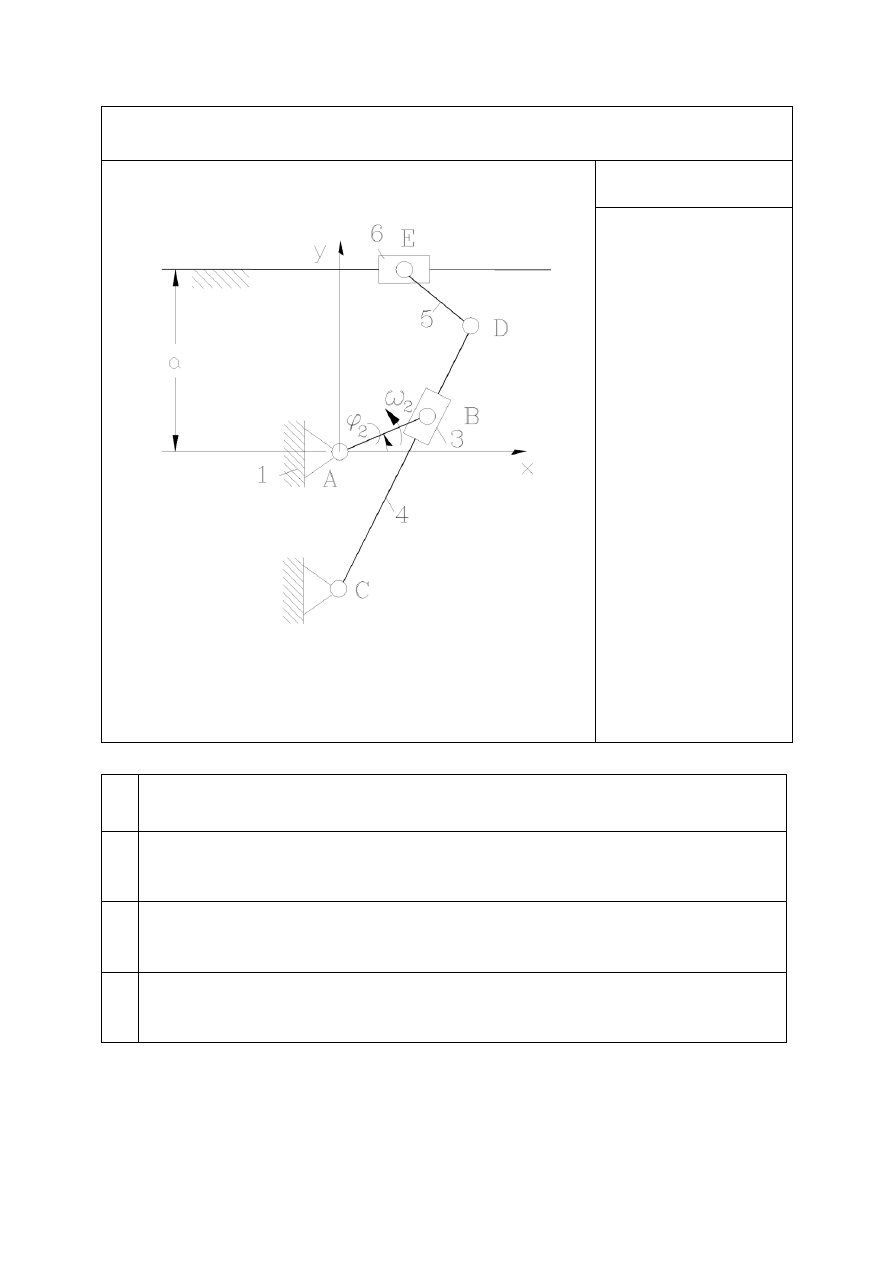
Zadanie projektowe nr K-1
Wymiary
AB = 0,15 m
AC=0,25 m
CD=0,53 m
DE=0,3 m
a=0,35 m
2
= ……
o
2
= ……rad/s
Lp.
Określić
1 Trajektorię punktu E (zakres pracy członu 6: x
Emin
, x
Emax
)
2
Przebiegi prędkości punktu E v
E
(
2
)
3 Przebiegi przyspieszenia punktu E a
E
(
2
)
Jak pokazano w [1]
1
, aby rozwiązać zadanie należy ułożyć układ funkcji opisujących
położenie członów mechanizmu:
f(w,q,x)=0,
(1)
gdzie:
w – wektor wymiarów(wartości stałych)
q – wektor napędów,
x – wektor zmiennych nieznanych.
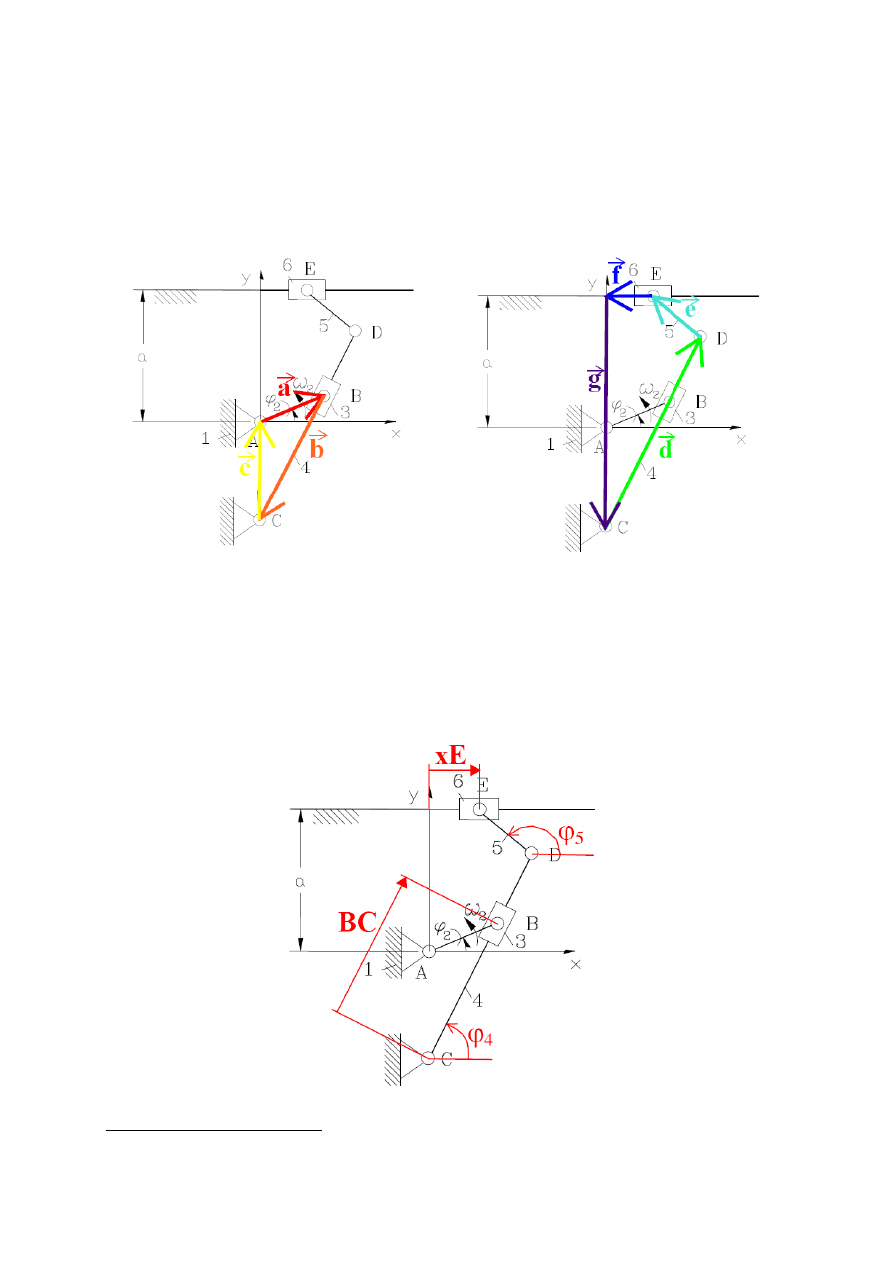
Rysunek 1. Przyjęte pętle wektorowe
Aby zapis był kompletny należy uzyskać n równań na n niewiadomych, czyli w tym
przypadku tyle ile wynosi wymiar wektora x (ile jest zmiennych niewiadomych).
Równania te, można uzyskać za pomocą tzw. równań konturowych. Są to równania sum
wektorów, które ułożone w pętle dają w wyniku 0. Na rys. 1 pokazano przyjęte pętle
wektorowe:
{
a⃗ + b
⃗ + c = 0
𝑑 + 𝑒 + 𝑓 + 𝑔 = 0
.
(2)
Rysunek 2. Zmienne zależne - nieznane
1
dział 3.3.2 – Uporządkowanie macierzowe (str. 132)
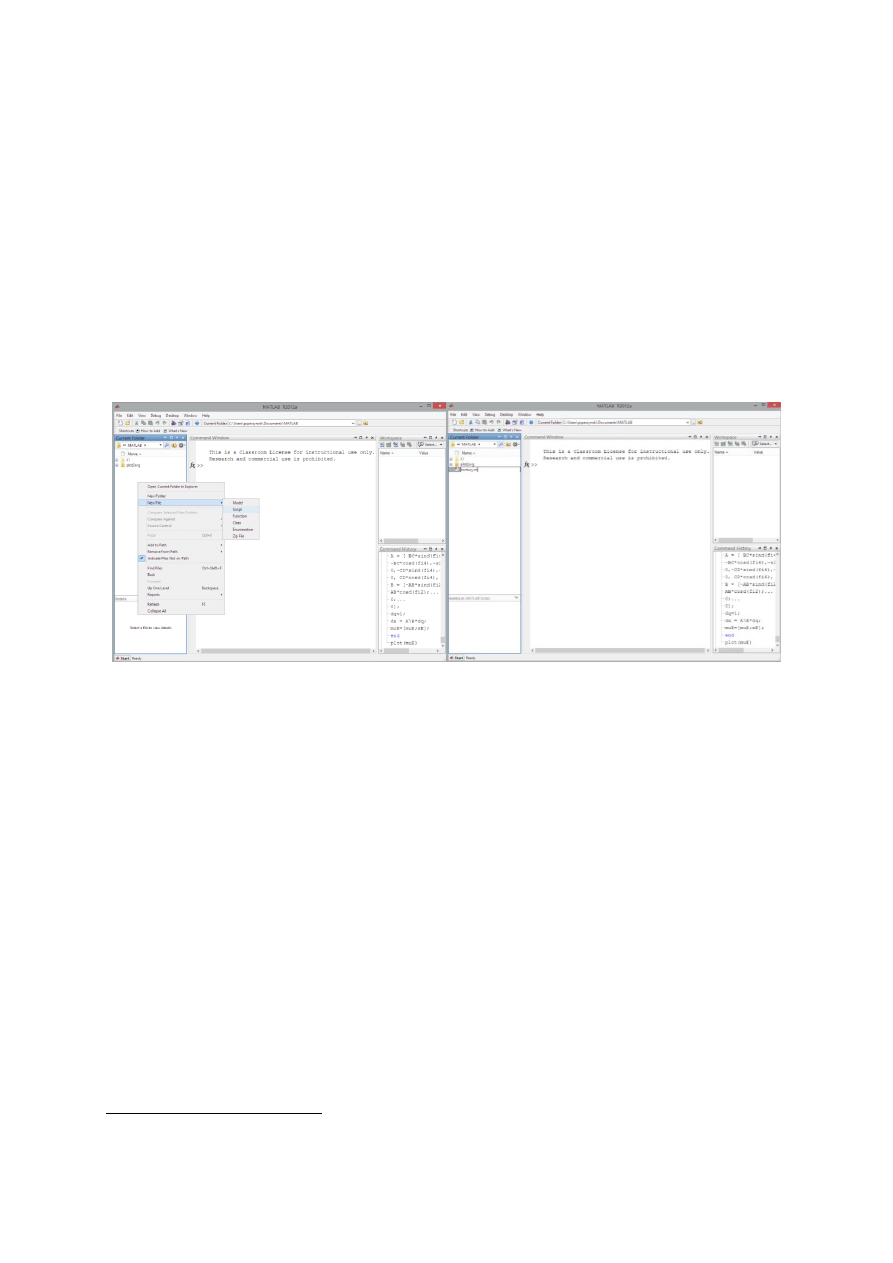
Jeżeli przyjąć za zmienne niewiadome wektor x, tak jak pokazano na rysunku 2:
x={BC,
φ
4
,
φ
5
,
xE }
T
Równania wektorowe (2) można zapisać, jako współrzędne wektorowe OX oraz OY (rzutując
wektory na osie głównego układu współrzędnych). W ten sposób otrzymamy 2 równania
z każdej pętli wektorowej. (2) przyjmuje postać:
𝑓(𝒘, 𝒒, 𝒙) =
{
AB cos(
φ
2
) −
BC
cos(
φ
4
) = 0
AB sin(
φ
2
) −
BC
sin(
φ
4
) + AC = 0
CD cos(
φ
4
) + DE cos(
φ
5
) −
𝑥𝐸
= 0
CD sin(
φ
4
) + DE sin(
φ
5
) − 𝑎 − 𝐴𝐶 = 0
.
(3)
Na czerwono zaznaczono zmienne niewiadome x, na zielono napęd q, reszta parametrów
zawartych w równaniach to wymiary (parametry stałe).
Tak zapisane równania można rozwiązać za pomocą programu MATLAB. Na początek
należy zdefiniować wszystkie wymiary oraz ustawić napędy. Należy rozpocząć o stworzenia
pustego pliku (skryptu) z rozszerzeniem .m, nazwiemy go kienmatyka_k1.m(rys. 3):
Rysunek 3. Tworzenie skryptu
Zaczynamy skrypt od wyczyszczenia przestrzeni roboczej, a następnie definiujemy wymiary:
clear
all
;
AB=0.15;
CD=0.53;
DE=0.3;
AC=0.25;
a =0.35;
fi2=30;
zmienna fi2 odpowiada kątowi napędu φ
2
, kolejno należy zdefiniować wskaźnik(uchwyt
2
)
do „funkcji nienazwanej”
3
, która zwróci nam wartość f(w,q,x) (3). W programie MATLAB
tworzy się go za pomocą znaku @:
f = @(X)([AB*cosd(fi2)-X(1)*cosd(X(2));
...
AB*sind(fi2)-X(1)*sind(X(2))+AC;
...
CD*cosd(X(2))+DE*cosd(X(3))-X(4);
...
CD*sind(X(2))+DE*cosd(X(3))-a-AC]);
2
ang. handle
3
ang. anonymous function
Funkcje sind oraz cosd odpowiadają funkcjom trygonometrycznym sin i cos, przyjmujące
argumenty kątowe w stopniach. Tak zdefiniowany wskaźnik na funkcję f można użyć,
do rozwiązania układu równań f(w,q,x)=0, za pomocą funkcji fsolve().
W następnym kroku należy zdefiniować wektor startowy zmiennych x, od którego zaczniemy
poszukiwanie rozwiązania:
x = [0.3,30,180,0];
wartości wektora x zostały przyjęte z góry i nie spełniają warunku (1): f(w,q,x)=0. Aby
znaleźć rozwiązanie użyjemy funkcji fsolve
4
w następujący sposób:
x = fsolve(f,x);
funkcja ta przyjmuje 2 parametry:
1. Wskaźnik na f.
2. Wektor startowy x, z którego zaczyna przeszukiwanie
Zwracana wartość to wektor rozwiązania, czyli szukane wartości x. Jeżeli informację, jakie
funkcja fsolve wypisuje na ekranie są niepożądane można je wyłączyć za pomocą
dodatkowych argumentów, przekazanych jako trzeci argument funkcji fsolve. Argumenty te
można złożyć za pomocą funkcji optimset
5
, np.:
x = fsolve(f,x,optimset(
'Display'
,
'off'
,
'TolFun'
,1e-12));
parametr „Display” definiuje, jakie informacje ma wypisać funkcja fsolve,
„TolFun” – tolerancja wartości funkcji f, poniżej której można zakończyć przeszukiwanie
rozwiązania.
Kolejnym krokiem jest rozwiązanie równania prędkości ẋ, w tym celu należy zróżniczkować
równania (1) po czasie, zakładając:
q=q(t)
x=x(t)
otzymamy rówanie:
Aẋ+Bq̇ =0,
(4)
gdzie:
𝐴 =
𝜕𝒇
𝜕𝒙
, 𝐵 =
𝜕𝒇
𝜕𝒒
to odpowiednio jakobiany ze względu na zmienne znane i nieznane. Aby rozwiązać równanie
prędkości ze względu na prędkości zmiennych nieznanych należy je przekształcić:
ẋ= -A
-1
Bq̇
Skrypt wygląda następująco:
A = [ BC*sind(fi4),-cosd(fi4),0,0;
...
-BC*cosd(fi4),-sind(fi4),0,0;
...
0,-CD*sind(fi4),-DE*sind(fi5),-1;
...
0, CD*cosd(fi4), DE*cosd(fi5),0];
B = [-AB*sind(fi2);
...
AB*cosd(fi2);
...
0;
...
0];
dq=1;
dx = -A\B*dq;
4
Szersze informacje znajdują się w pomocy do programu MATLAB, wywołując polecenia: „help fsolve”
lub „doc fsolve”
5
jw.: „help optimset” lub „doc optimset”
dq jest to pochodna napędu φ
2
, czyli prędkość kątowa ω
2
. W wyniku mamy prędkości ẋ
.
Jest to rozwiązanie jedynie dla jednej pozycji kąta φ
2
. Jeżeli chcemy wyznaczyć
charakterystykę dla całego zakresu pracy należy skrypt zapętlić w następujący sposób:
Wersja dla jednej pozycji
Skrypt zapętlony
→
→
→
→
→
→
→
→
→
clear
all
;
AB=0.15;
CD=0.53;
DE=0.3;
AC=0.25;
a =0.35;
x = [0.3,30,180,0];
fi2=30;
f = @(X)([AB*cosd(fi2)-X(1)*cosd(X(2));
...
AB*sind(fi2)-X(1)*sind(X(2))+AC;
...
CD*cosd(X(2))+DE*cosd(X(3))-X(4);
...
CD*sind(X(2))+DE*sind(X(3))-a-AC]);
%x = fsolve(f,x);
x = fsolve(f,x,...
optimset(
'Display'
,
'off'
,
'TolFun'
,1e-12));
BC = x(1);
fi4 = x(2);
fi5 = x(3);
xE = x(4);
A = [ BC*sind(fi4),-cosd(fi4),0,0;
...
-BC*cosd(fi4),-sind(fi4),0,0;
...
0,-CD*sind(fi4),-DE*sind(fi5),-1;
...
0, CD*cosd(fi4), DE*cosd(fi5),0];
B = [-AB*sind(fi2);
...
AB*cosd(fi2);
...
0;
...
0];
dq=1;
dx = -A\B*dq;
clear
all
;
AB=0.15;
CD=0.53;
DE=0.3;
AC=0.25;
a =0.35;
x = [0.3,30,180,0];
wek_muE=[];wek_fi2=[];wek_t=[];wek_vE=[];
fi2_pocz=30;
for fi2=fi2_pocz:1:(fi2_pocz+360 )
f = @(X)([AB*cosd(fi2)-X(1)*cosd(X(2));
...
AB*sind(fi2)-X(1)*sind(X(2))+AC;
...
CD*cosd(X(2))+DE*cosd(X(3))-X(4);
...
CD*sind(X(2))+DE*sind(X(3))-a-AC]);
%x = fsolve(f,x);
x = fsolve(f,x,
...
optimset(
'Display'
,
'off'
,
'TolFun'
,1e-12));
BC = x(1);
fi4 = x(2);
fi5 = x(3);
xE = x(4);
A = [-cosd(fi4), BC*sind(fi4),0,0;
...
-sind(fi4),-BC*cosd(fi4),0,0;
...
0,-CD*sind(fi4),-DE*sind(fi5),-1;
...
0, CD*cosd(fi4), DE*cosd(fi5),0];
B = [-AB*sind(fi2);
...
AB*cosd(fi2);
...
0;
...
0];
dq=1;
dx = -A\B*dq;
t = ((fi2-fi2_pocz)*pi/180)/dq;
wek_muE=[wek_muE;xE];
wek_vE=[wek_vE;dx(4)];
wek_fi2=[wek_fi2;fi2];
wek_t=[wek_t;t];
end
Zmienne „wek_t”, „wek_fi2”, „wek_muE”, „wek_vE” są wektorami, które przechowują
wartości czasu, kąta φ
2
, położenia punktu E oraz prędkości v
E
. Przed pętlą tworzone są, jako
wektory stałe, a następnie dopisywane są wartości charakterystyk na koniec wektora za
każdym wywołaniem pętli symulacji. Na czerwono oraz strzałkami po lewej stronie
zaznaczone zostały różnice pomiędzy skryptami.
Aby rozwiązać przyspieszenia należy zaimplementować w powyższym skrypcie równanie
przyspieszeń:
Aẍ+Ȧẋ+Bq̈+Ḃq̇ =0.
Literatura:
1. Anotni Gronowicz, „Podstawy Analizy układów kinematycznych”, Oficyna
Wydawnicza Politechniki Wrocławskiej 2003
Wyszukiwarka
Podobne podstrony:
2 Układ równań i nierówności 3 przykładowe rozwiązania
2 Układ równań i nierówności 3 przykładowe rozwiązania
Szereg Fouriera przyklady, SiMR, Studia inżynierskie, Semestr II 2, Równania różniczkowe, 2012 13
k1przyklad, przyklad k1
Szereg Fouriera przyklady, SiMR, Równania różniczkowe
Macierze i układy równań przykłady
MES1 Wykład 2 PRZEDSTAWIENIE METOD PRZYBLIŻONYCH NA PRZYKŁADZIE RÓWNANIA POISSONA
Gewert, Skoczylas Równania różniczkowe zwyczajne , teoria przykłady, zadania
2 PRZYKŁADY ZASTOSOWANIA PRZYBLIŻONYCH METOD ANALITYCZNYCH ROZWIĄZYWANIA RÓWNANIA OPERATOROWEGO
k1przyklad, przyklad3 k1
2012 Algebra zaoczneD K1 przyklad
mn k1 przykl 2011 2012
Szereg potegowy przyklady ogarnijtemat.com, SiMR inżynierskie, Semestr 2, Równania różniczkowe, Wykł
Szereg Fouriera przyklady, SiMR, Studia inżynierskie, Semestr II 2, Równania różniczkowe, 2012 13
M Gewert, Z Skoczylas Równania różniczkowe zwyczajne Teoria, przyklady, zadania
Równania przykład
Przykłady rozwiązywania równań
więcej podobnych podstron