Lecture Notes: Introduction to Finite Element Method
Chapter 1. Introduction
© 1998 Yijun Liu, University of Cincinnati
13
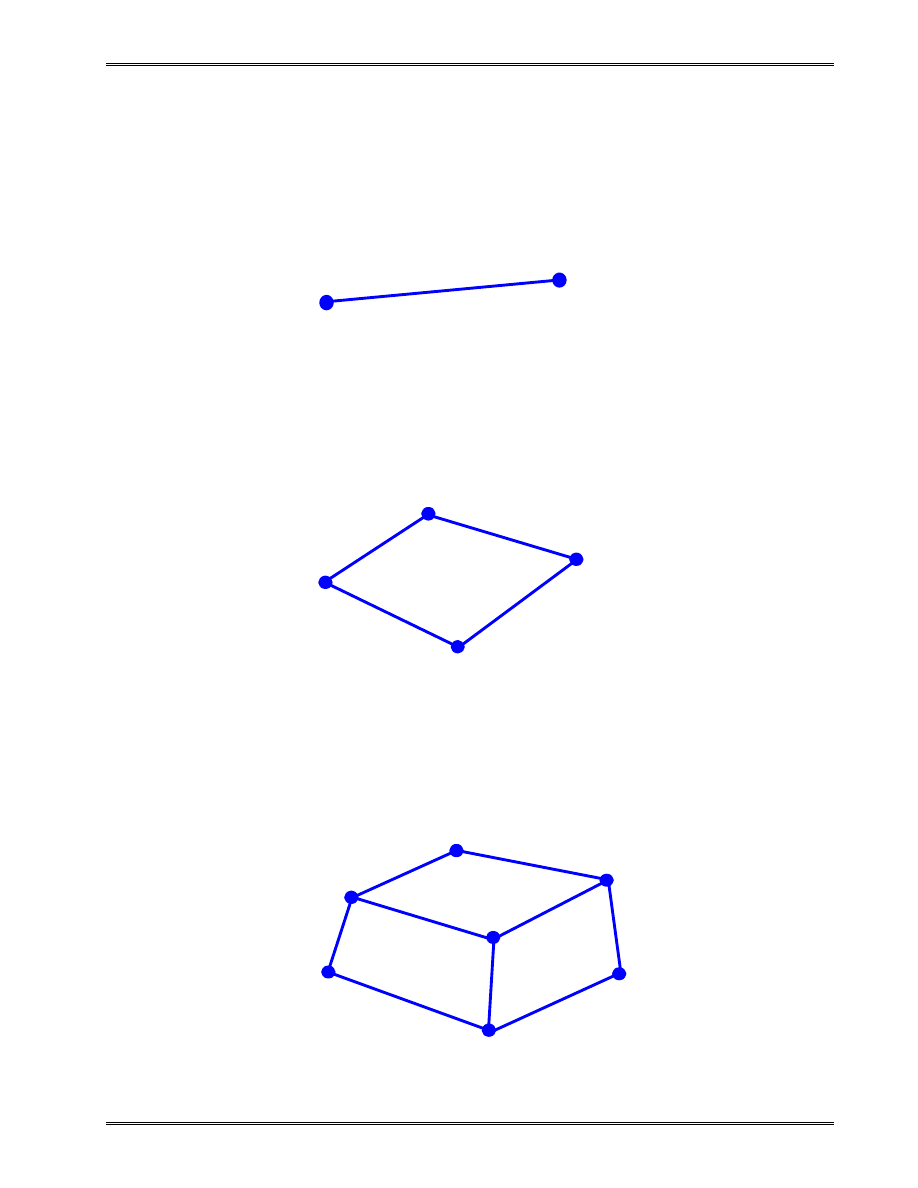
Types of Finite Elements
1-D (Line) Element
(Spring, truss, beam, pipe, etc.)
2-D (Plane) Element
(Membrane, plate, shell, etc.)
3-D (Solid) Element
(3-D fields - temperature, displacement, stress, flow velocity)
Lecture Notes: Introduction to Finite Element Method
Chapter 1. Introduction
© 1998 Yijun Liu, University of Cincinnati
14
III. Spring Element
“
Everything important is simple
.
”
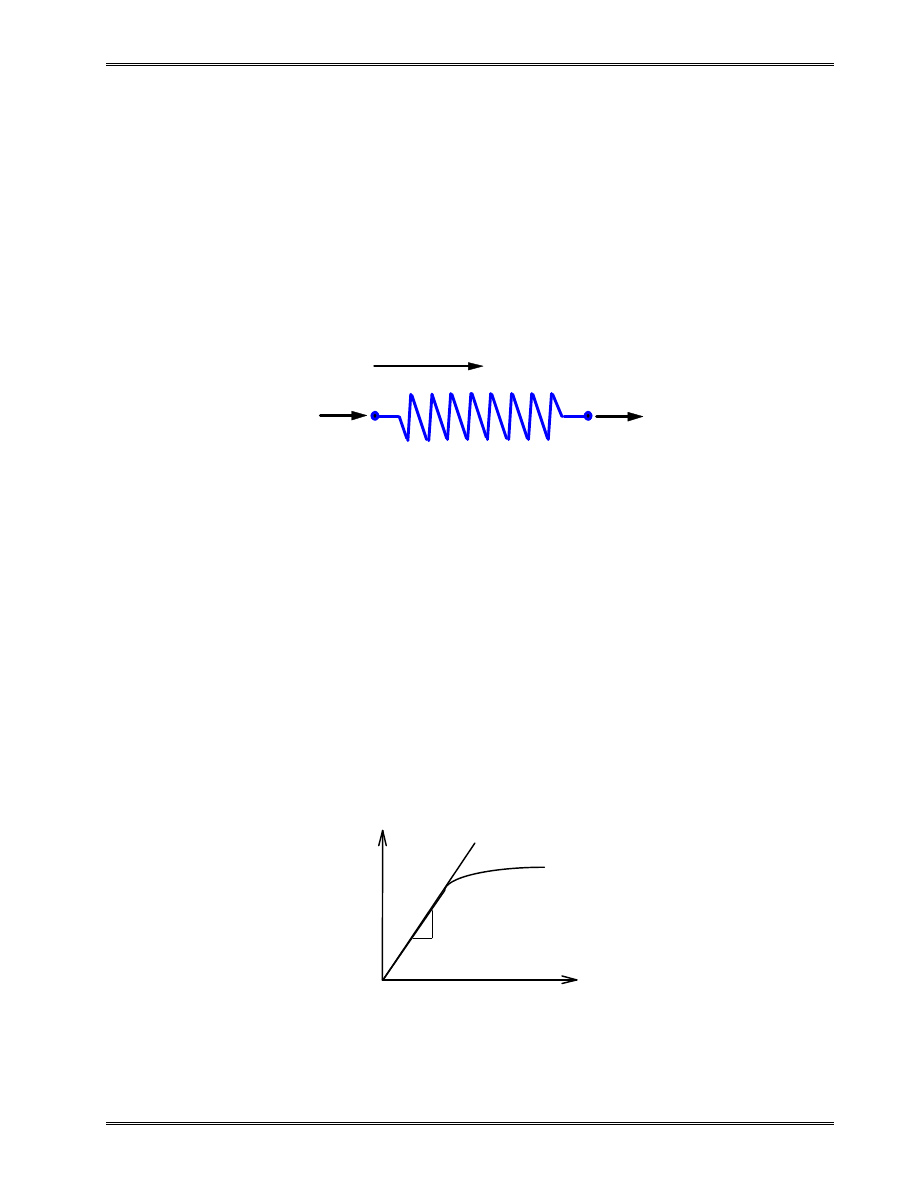
One Spring Element
Two nodes:
i, j
Nodal displacements:
u
i
, u
j
(in, m, mm)
Nodal forces:
f
i
, f
j
(lb, Newton)
Spring constant (stiffness):
k (lb/in, N/m, N/mm)
Spring force-displacement relationship:
F
k
= ∆
with
∆ =
−
u
u
j
i
k
F
=
/
∆
(> 0) is the force needed to produce a unit stretch.
k
i
j
u
j
u
i
f
i
f
j
x
∆
F
Nonlinear
Linear
k

Lecture Notes: Introduction to Finite Element Method
Chapter 1. Introduction
© 1998 Yijun Liu, University of Cincinnati
15
We only consider linear problems in this introductory
course.
Consider the equilibrium of forces for the spring. At node i,
we have
f
F
k u
u
ku
ku
i
j
i
i
j
= −
= −
−
=
−
(
)
and at node j,
f
F
k u
u
ku
ku
j
j
i
i
j
= =
−
= −
+
(
)
In matrix form,
k
k
k
k
u
u
f
f
i
j
i
j
−
−
=
or,
ku
f
=
where
k = (element) stiffness matrix
u = (element nodal) displacement vector
f = (element nodal) force vector
Note that k is symmetric. Is k singular or nonsingular? That is,
can we solve the equation? If not, why?
Lecture Notes: Introduction to Finite Element Method
Chapter 1. Introduction
© 1998 Yijun Liu, University of Cincinnati
16
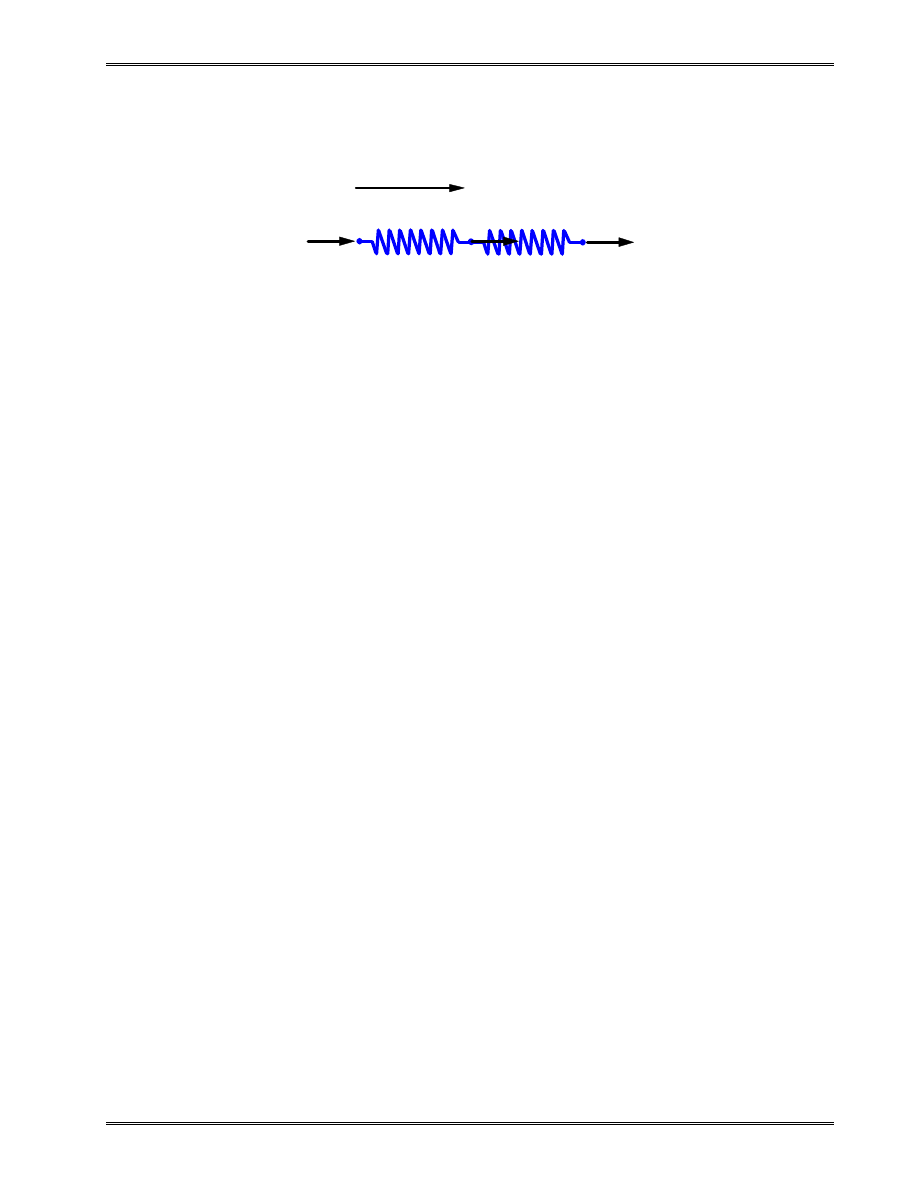
Spring System
For element 1,
k
k
k
k
u
u
f
f
1
1
1
1
1
2
1
1
2
1
−
−
=
element 2,
k
k
k
k
u
u
f
f
2
2
2
2
2
3
1
2
2
2
−
−
=
where
f
i
m
is the (internal) force acting on local node i of element
m (i = 1, 2).
Assemble the stiffness matrix for the whole system:
Consider the equilibrium of forces at node 1,
F
f
1
1
1
=
at node 2,
F
f
f
2
2
1
1
2
=
+
and node 3,
F
f
3
2
2
=
k
1
u
1,
F
1
x
k
2
u
2,
F
2
u
3,
F
3
1
2
3
Lecture Notes: Introduction to Finite Element Method
Chapter 1. Introduction
© 1998 Yijun Liu, University of Cincinnati
17
That is,
F
k u
k u
F
k u
k
k u
k u
F
k u
k u
1
1 1
1
2
2
1 1
1
2
2
2
3
3
2
2
2
3
=
−
= −
+
+
−
= −
+
(
)
In matrix form,
k
k
k
k
k
k
k
k
u
u
u
F
F
F
1
1
1
1
2
2
2
2
1
2
3
1
2
3
0
0
−
−
+
−
−
=
or
KU
F
=
K is the stiffness matrix (structure matrix) for the spring system.
An alternative way of assembling the whole stiffness matrix:
“Enlarging” the stiffness matrices for elements 1 and 2, we
have
k
k
k
k
u
u
u
f
f
1
1
1
1
1
2
3
1
1
2
1
0
0
0
0
0
0
−
−
=
0
0
0
0
0
0
2
2
2
2
1
2
3
1
2
2
2
k
k
k
k
u
u
u
f
f
−
−
=

Lecture Notes: Introduction to Finite Element Method
Chapter 1. Introduction
© 1998 Yijun Liu, University of Cincinnati
18
Adding the two matrix equations (superposition), we have
k
k
k
k
k
k
k
k
u
u
u
f
f
f
f
1
1
1
1
2
2
2
2
1
2
3
1
1
2
1
1
2
2
2
0
0
−
−
+
−
−
=
+
This is the same equation we derived by using the force
equilibrium concept.
Boundary and load conditions:
Assuming,
u
F
F
P
1
2
3
0
=
=
=
and
we have
k
k
k
k
k
k
k
k
u
u
F
P
P
1
1
1
1
2
2
2
2
2
3
1
0
0
0
−
−
+
−
−
=
which reduces to
k
k
k
k
k
u
u
P
P
1
2
2
2
2
2
3
+
−
−
=
and
F
k u
1
1
2
= −
Unknowns are
U
=
u
u
2
3
and the reaction force
F
1
(if desired).

Lecture Notes: Introduction to Finite Element Method
Chapter 1. Introduction
© 1998 Yijun Liu, University of Cincinnati
19
Solving the equations, we obtain the displacements
u
u
P k
P k
P k
2
3
1
1
2
2
2
=
+
/
/
/
and the reaction force
F
P
1
2
= −
Checking the Results
•
Deformed shape of the structure
•
Balance of the external forces
•
Order of magnitudes of the numbers
Notes About the Spring Elements
•
Suitable for stiffness analysis
•
Not suitable for stress analysis of the spring itself
•
Can have spring elements with stiffness in the lateral
direction, spring elements for torsion, etc.
Wyszukiwarka
Podobne podstrony:
Chapt 06 Lect03
Chapt 01 Lect01
Chapt 03 Lect03
Chapt 02 Lect03
Chapt 01 Lect02
Chapt 04 Lect03
Chapt 01 Lect04
Chapt 07 Lect03
Chapt 01
TD 01
Ubytki,niepr,poch poł(16 01 2008)
01 E CELE PODSTAWYid 3061 ppt
01 Podstawy i technika
01 Pomoc i wsparcie rodziny patologicznej polski system pomocy ofiarom przemocy w rodzinieid 2637 p
zapotrzebowanie ustroju na skladniki odzywcze 12 01 2009 kurs dla pielegniarek (2)
01 Badania neurologicz 1id 2599 ppt
01 AiPP Wstep
więcej podobnych podstron