PODSTAWY LINIOWEJ
TEORII SPRĘŻYSTOŚCI
•
Przestrzenne zadanie brzegowe teorii
sprężystości
•
Metody rozwiązywania zadań brzegowych
teorii sprężystości
•
Rozwiązanie płaskiego zadania brzegowego
teorii sprężystości w naprężeniach
•
Rozwiązanie płaskiego osiowosymetrycznego
zadania brzegowego teorii sprężystości w
przemieszczeniach
•
Naprężenia kontaktowe
Przestrzenne zadanie brzegowe teorii sprężystości
1.
Ciało jest wypełnione w sposób ciągły materią zarówno przed, jak i po
odkształceniu (kontinuum materialne).
2.
Ośrodek ciągły jest fizycznie jednorodny i izotropowy.
3.
Przemieszczenia i odkształcenia pojawiają się w chwili przyłożenia
obciążeń wywołujących naprężenia.
4.
Istnieje naturalny beznapięciowy (beznaprężeniowy) stan ciała, do
którego powraca ono zawsze po odciążeniu.
5.
Odkształcenia i przemieszczenia są bardzo małe.
6.
Ośrodek ciągły (materiał) zachowuje się zgodnie z prawem Hooke’a.
7.
Funkcje określające naprężenia, przemieszczenia i odkształcenia są
ciągłe i różniczkowalne.
Klasyczna, liniowa teoria sprężystości jest mechaniką ciała (ośrodka)
odkształcalnego, opierająca się na następujących
założeniach
:
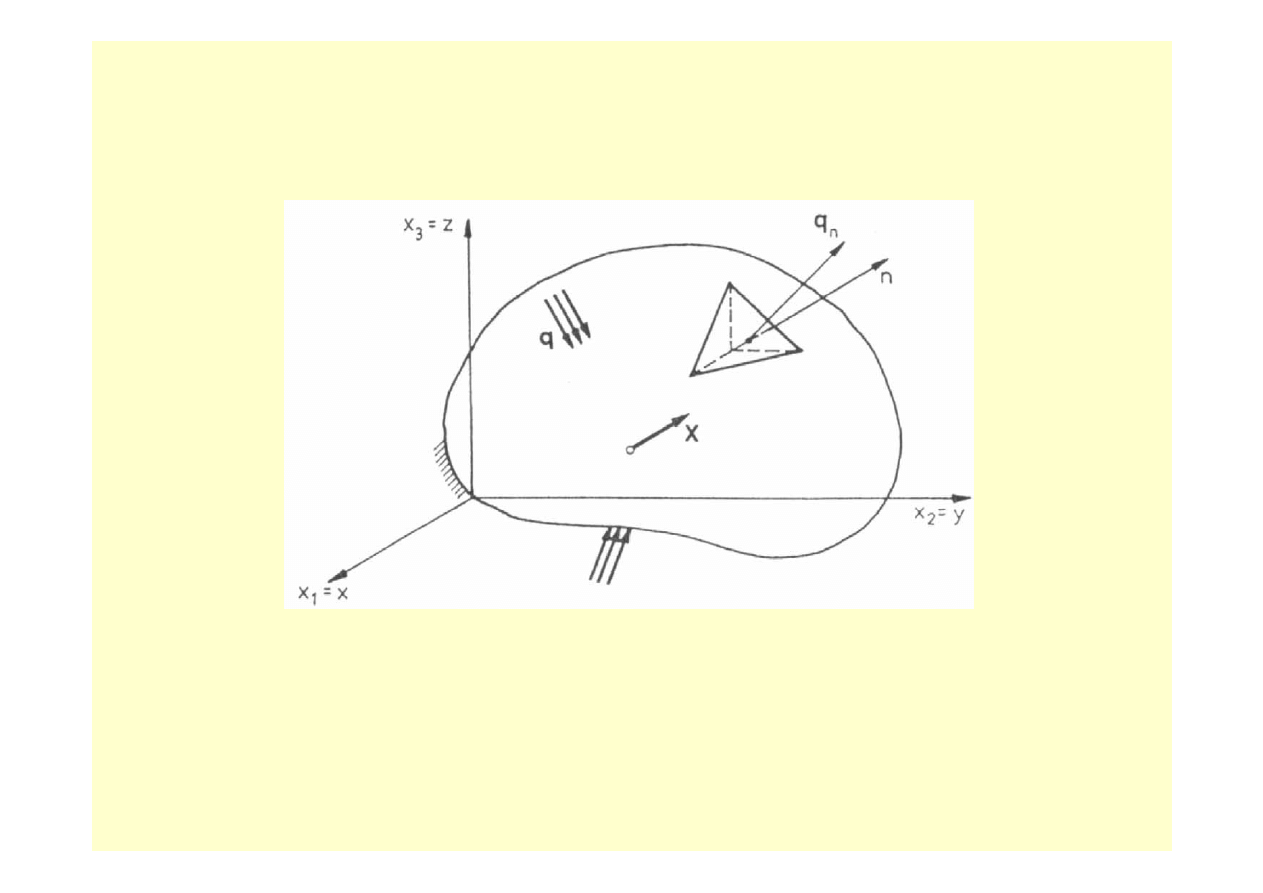
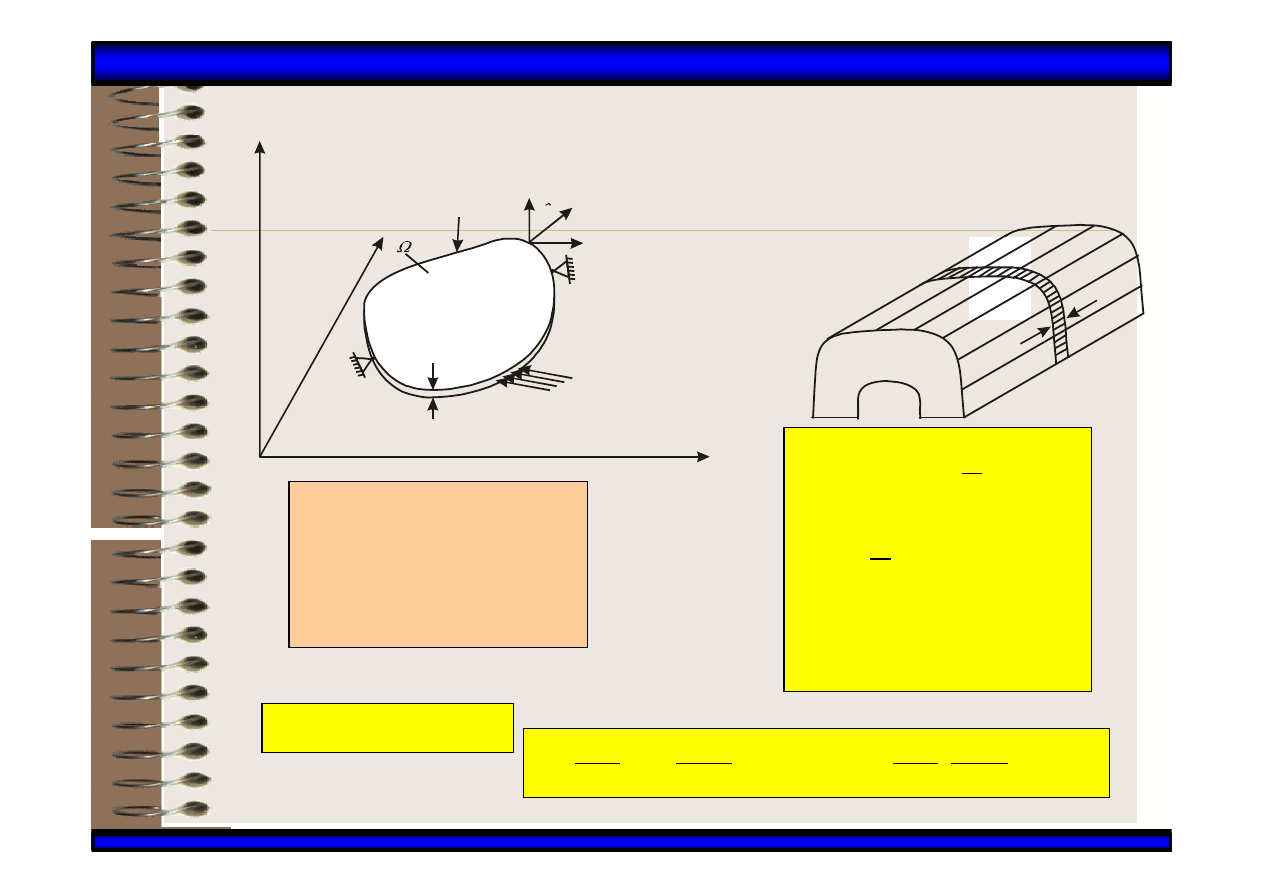
Przestrzenne zadanie brzegowej teorii sprężystości
można sformułować w następujący sposób:
Dane jest ciało liniowo sprężyste o dowolnym kształcie i wymiarach ( rys. 10.1 )
Przyjmujemy, że pozostaje ono w spoczynku. Znany jest sposób podparcia ciała i jego
własności sprężyste. Określone są siły
powierzchniowe q
i
masowe X
(
objętościowe X
ρ
)
działające na rozważane ciało. Poszukujemy natomiast wektorowego pola przemieszczeń
oraz tensorowych pól stanu naprężenia i odkształcenia w tym ciele. Innymi słowy, trzeba
znaleźć piętnaście funkcji współrzędnych punktu w ciele nieodkształconym.
Rys. 10.1
(
)
3
,
2
,
1
,
,
=
k
j
i
( )
k
i
x
u
(
)
3
,
2
,
1
,
=
k
i
(
)
3
,
2
,
1
,
,
=
k
j
i
( )
k
ij
i
ε
(
)
z
y
x
x
,
,
σ
(
)
z
y
x
xy
,
,
τ
(
)
z
y
x
y
,
,
σ
(
)
z
y
x
yz
,
,
τ
(
)
z
y
x
z
,
,
σ
(
)
z
y
x
zx
,
,
τ
(
)
z
y
x
u
,
,
(
)
z
y
x
v
,
,
(
)
z
y
x
w
,
,
(
)
z
y
x
x
,
,
ε
(
)
z
y
x
xy
,
,
γ
(
)
z
y
x
y
,
,
ε
(
)
z
y
x
yz
,
,
γ
( )
k
ij
x
=
σ
(
)
z
y
x
z
,
,
ε
(
)
z
y
x
zx
,
,
γ
lub w notacji inżynierskiej:
( 10.1 )
( 10.2 )
( 10.3 )
( 10.4 )
( 10.6 )
Poszukiwane funkcje:
( 10.5 )
Do znalezienia tych funkcji należy zastosować piętnaście podstawowych równań teorii
sprężystości, które zostały wcześniej wprowadzone. Tworzą one trzy grupy zależności:
A.
Równania wewnętrznej równowagi lokalnej
Są to trzy warunki Naviera, w których uwzględniono postulat Boltzmana, zwany
także warunkiem Cauchy’ego
0
,
=
ρ
+
σ
i
j
ji
X
(
)
3
,
2
,
1
;
3
,
2
,
1
=
=
j
i
ji
ij
σ
=
σ
( 10.7 )
( 10.8 )
(
)
3
,
2
,
1
;
3
,
2
,
1
=
=
j
i
albo w notacji inżynierskiej:
0
=
ρ
+
∂
τ
∂
+
∂
τ
∂
+
∂
σ
∂
X
z
y
x
zx
yx
x
0
=
ρ
+
∂
τ
∂
+
∂
σ
∂
+
∂
τ
∂
Y
z
y
x
zy
y
xy
0
=
ρ
+
∂
σ
∂
+
∂
τ
∂
+
∂
τ
∂
Z
z
y
x
z
yz
xz
yx
xy
τ
=
τ
zy
yz
τ
=
τ
xz
zx
τ
=
τ
( 10.9 )
( 10.10 )
B.
Związki geometryczne.
Wyróżnia się dwa rodzaje związków geometrycznych:
B1.
Zależność między składowymi stanu odkształcenia i przemieszczeniami,
czyli sześć związków Cauchy’ego.
(
)
i
j
j
i
ij
u
u
,
,
2
1
+
=
ε
(
)
3
,
2
,
1
;
3
,
2
,
1
=
=
j
i
ji
ij
ε
=
ε
( 10.11 )
( 10.12 )
albo w notacji inżynierskiej:
,
x
u
x
∂
∂
=
ε
,
y
v
y
∂
∂
=
ε
,
z
w
z
∂
∂
=
ε
,
x
v
y
u
xy
∂
∂
+
∂
∂
=
γ
,
y
w
z
v
yz
∂
∂
+
∂
∂
=
γ
,
z
u
x
w
zx
∂
∂
+
∂
∂
=
γ
( 10.13 )
B2. Warunki
ciągłości ( nierozdzielności ) odkształceń de Saint – Venanta,
których jest także sześć:
0
,
ln
j
=
mn
kl
ikm
e
e
ε
(
)
3
,
2
,
1
;
3
,
2
,
1
=
=
j
i
(
)
3
,
2
,
1
;
3
,
2
,
1
=
=
l
k
(
)
3
,
2
,
1
;
3
,
2
,
1
=
=
n
m
( 10.14 )
albo w notacji inżynierskiej:
,
2
2
2
2
2
y
x
x
y
xy
y
x
∂
∂
γ
∂
=
∂
ε
∂
+
∂
ε
∂
,
2
2
2
2
2
z
y
y
z
yz
z
y
∂
∂
γ
∂
=
∂
ε
∂
+
∂
ε
∂
x
z
z
x
zx
x
z
∂
∂
γ
∂
=
∂
ε
∂
+
∂
ε
∂
2
2
2
2
2
z
y
x
y
z
x
x
yz
zx
xy
∂
∂
ε
∂
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
γ
∂
−
∂
γ
∂
+
∂
γ
∂
∂
∂
2
2
x
z
y
z
x
y
y
zx
xy
yz
∂
∂
ε
∂
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
γ
∂
−
∂
γ
∂
+
∂
γ
∂
∂
∂
2
2
y
x
z
x
y
z
z
xy
yz
zx
∂
∂
ε
∂
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
γ
∂
−
∂
γ
∂
+
∂
γ
∂
∂
∂
2
2
( 10.15 )
C.
Związki fizyczne
Jest to uogólnione prawo Hooke’a, które może mieć dwojaką postać:
C1.
Sześć funkcji określających składowe stanu odkształcenia w zależności
od składowych stanu naprężenia:
ij
kk
ij
ij
E
E
δ
σ
ν
−
σ
ν
+
=
ε
1
(
)
3
,
2
,
1
,
,
=
k
j
i
( 10.16 )
albo w notacji inżynierskiej:
(
)
[
]
z
y
x
x
E
σ
+
σ
ν
−
σ
=
ε
1
(
)
[
]
x
z
y
y
E
σ
+
σ
ν
−
σ
=
ε
1
(
)
[
]
y
x
z
z
E
σ
+
σ
ν
−
σ
=
ε
1
,
G
xy
xy
τ
=
γ
,
G
yz
yz
τ
=
γ
G
zx
zx
τ
=
γ
( 10.17 )
C2.
Sześć funkcji określających składowe stanu naprężenia w zależności
od składowych stanu odkształcenia.
ij
kk
ij
ij
G
G
δ
ε
ν
−
ν
+
ε
=
σ
2
1
2
2
(
)
3
,
2
,
1
;
3
,
2
,
1
;
3
,
2
,
1
=
=
=
k
j
i
( 10.18 )
albo w notacji inżynierskiej:
(
)
⎥⎦
⎤
⎢⎣
⎡
ε
+
ε
+
ε
ν
−
ν
+
ε
ν
+
=
σ
z
y
x
x
x
E
2
1
1
(
)
⎥⎦
⎤
⎢⎣
⎡
ε
+
ε
+
ε
ν
−
ν
+
ε
ν
+
=
σ
z
y
x
y
y
E
2
1
1
(
)
1
1 2
z
z
x
y
z
E
ν
σ
ε
ε
ε
ε
ν
ν
⎡
⎤
=
+
+
+
⎢
⎥
+
−
⎣
⎦
xy
xy
G
γ
=
τ
yz
yz
G
γ
=
τ
zx
zx
G
γ
=
τ
( 10.19 )
W dynamicznym zadaniu brzegowym teorii sprężystości poszukiwane
funkcje ( 10.1 ), ( 10.2 ) i ( 10.3 ) albo ( 10.4 ),( 10.5 ) i ( 10.6 ) są dodatkowo zależne od
czasu t. W równaniach równowagi wewnętrznej należy uwzględnić siły bezwładności
d’Alemberta przyłożone do infinitezymalnego prostopadłościanu. Formuły
( 10.7 ) albo ( 10.9 ), w których prawe strony są odpowiednio równe :
2
2
..
t
u
i
u
i
∂
∂
ρ
=
ρ
(
)
3
,
2
,
1
=
i
,
2
2
t
u
∂
∂
ρ
,
2
2
t
v
∂
∂
ρ
,
2
2
t
w
∂
∂
ρ
albo
stają się
dynamicznymi równaniami ośrodka ( ciała ) odkształcalnego.
Metody rozwiązywania zadań brzegowych
teorii sprężystości
Poszukiwane funkcje ( 10.1 ), ( 10.2 ) i ( 10.3 ) albo ( 10.4 ),( 10.5 ) i ( 10.6 ) muszą być tak
dobrane, aby spełniały podstawowe równania teorii sprężystości A, B i C oraz warunki
brzegowe, a w przypadku zadania dynamicznego także warunki początkowe.
Rozwiązanie w naprężeniach
polega na tym, że w pierwszej kolejności wyznacza
się sześć funkcji określających składowe stanu naprężenia
( )
k
ij
x
σ
(
)
3
,
2
,
1
,
,
=
k
j
i
albo
(
)
,
,
, z
y
x
x
σ
(
)
,
,
, z
y
x
y
σ
(
)
,
,
, z
y
x
z
σ
(
)
,
,
, z
y
x
xy
τ
(
)
,
,
, z
y
x
yz
τ
(
)
.
,
, z
y
x
zx
τ
Należy w tym celu tak przekształcić podstawowe równania teorii sprężystości, aby uzyskać
układ równań różniczkowych ze względu na naprężenia. Trzy pierwsze równania tego
układu stanowią lokalne warunki równowagi wewnętrznej A. Aby uzyskać pozostałe
równania, należy składowe stanu odkształcenia, wyrażone przez składowe stanu
naprężenia w zależnościach C1, wprowadzić do warunków ciągłości odkształceń B2.
Po dokonaniu tej operacji i po przekształceniach, w trakcie których stosuje się również
równania równowagi lokalnej, otrzymujemy warunki nierozdzielności odkształceń
wyrażone przez naprężenia.
Jest to sześć równań Beltramiego - Michella >>>
Sześć równań Beltramiego – Michella:
(
)
k
k
ij
i
j
j
i
ij
kk
kk
ij
X
X
X
,
,
,
,
,
1
1
1
δ
ν
−
ν
−
+
−
=
σ
ν
+
+
σ
(
)
3
,
2
,
1
,
,
=
k
j
i
( 10.20 )
albo w notacji inżynierskiej:
0
2
1
1
3
2
2
2
=
ρ
∂
∂
+
ρ
⎟
⎠
⎞
⎜
⎝
⎛
∂
∂
+
∂
∂
+
∂
∂
ν
−
ν
+
∂
σ
∂
ν
+
+
σ
∇
x
X
z
Z
y
Y
x
X
x
śr
x
0
2
1
1
3
2
2
2
=
ρ
∂
∂
+
ρ
⎟
⎠
⎞
⎜
⎝
⎛
∂
∂
+
∂
∂
+
∂
∂
ν
−
ν
+
∂
σ
∂
ν
+
+
σ
∇
y
Y
z
Z
y
Y
x
X
y
śr
y
0
2
1
1
3
2
2
2
=
ρ
∂
∂
+
ρ
⎟
⎠
⎞
⎜
⎝
⎛
∂
∂
+
∂
∂
+
∂
∂
ν
−
ν
+
∂
σ
∂
ν
+
+
σ
∇
z
Z
z
Z
y
Y
x
X
z
śr
z
0
1
3
2
2
=
ρ
∂
∂
+
ρ
∂
∂
+
∂
∂
σ
∂
ν
+
+
τ
∇
x
Z
z
X
x
z
śr
xy
0
1
3
2
2
=
ρ
∂
∂
+
ρ
∂
∂
+
∂
∂
σ
∂
ν
+
+
τ
∇
z
X
y
Y
z
y
śr
yz
0
1
3
2
2
=
ρ
∂
∂
+
ρ
∂
∂
+
∂
∂
σ
∂
ν
+
+
τ
∇
y
X
x
Y
y
x
śr
xy
( 10.21 )
oznacza operator
harmoniczny Laplace’a
zwany laplasjanem.
Czytaj „ nabla dwa”.
( 10.22 )
-
2
2
2
2
2
2
2
z
y
x
∂
∂
+
∂
∂
+
∂
∂
=
∇
Poszukiwanych sześć funkcji
( )
k
ij
x
σ
(
)
3
,
2
,
1
,
,
=
k
j
i
albo
(
)
,
,
, z
y
x
x
σ
(
)
,
,
,
z
y
x
y
σ
(
)
,
,
, z
y
x
z
σ
(
)
,
,
,
z
y
x
xy
τ
(
)
,
,
,
z
y
x
yz
τ
(
)
,
,
, z
y
x
zx
τ
musi spełniać równania równowagi wewnętrznej A, równania Beltramiego – Michella oraz
warunki brzegowe:
jn
ji
ni
q
α
σ
=
(
)
3
,
2
,
1
;
3
,
2
,
1
=
=
j
i
albo w notacji inżynierskiej:
( )
( )
( )
zn
yn
xn
q
zx
yx
x
nx
cos
cos
cos
τ
+
τ
+
σ
=
( )
( )
( )
zn
yn
xn
q
zy
y
xy
ny
cos
cos
cos
τ
+
σ
+
τ
=
( )
( )
( )
zn
yn
xn
q
z
yz
xz
nz
cos
cos
cos
σ
+
τ
+
τ
=
( 10.23 )
( 10.24 )
W tym przypadku n jest normalną do powierzchni zew. ciała w rozważanym
punkcie, której kierunek wyznaczają
albo cos( xn ), cos( yn ), cos( zn ).
(
)
3
,
2
,
1
=
α j
ij
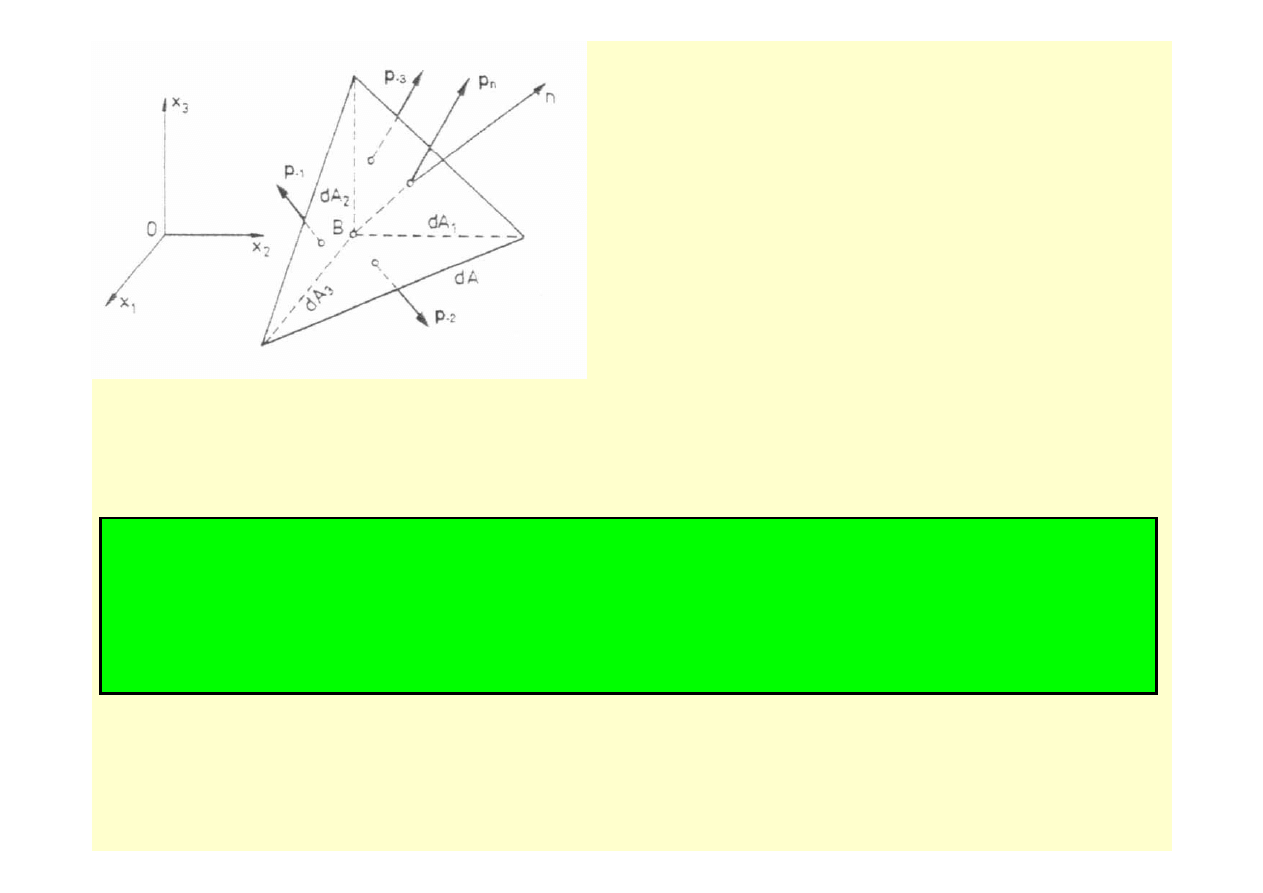
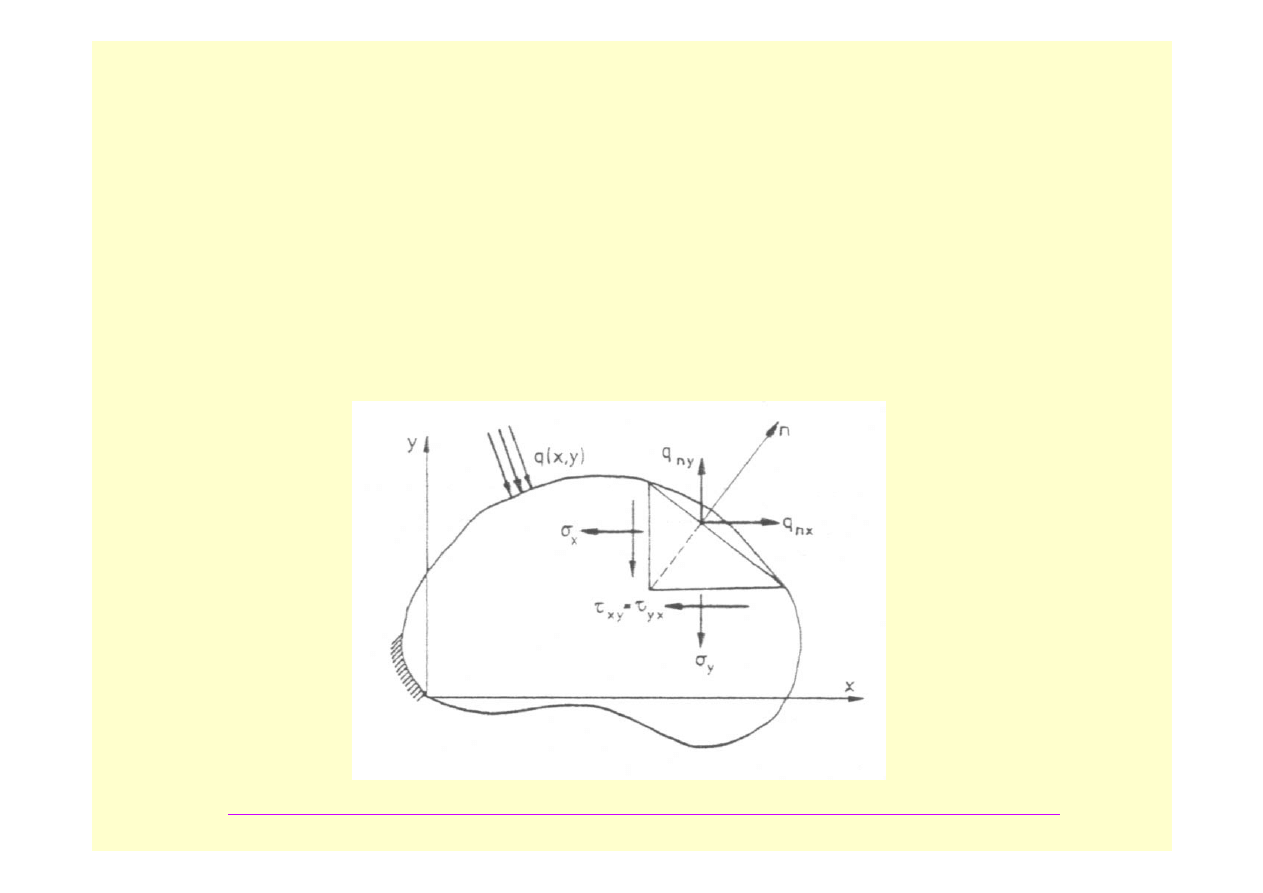
Ściana elementarnego czworościanu ( patrz obok )
prostopadła do n jest fragmentem powierzchni
ciała, na który działa obciążenie powierzchniowe
q( x, y, z ) o składowych q
ni
( i = 1, 2, 3 )
albo q
nx
, q
ny
, q
nz
. Pozostałe trzy wzajemnie
prostopadłe ściany,na których występują
naprężenia, znajdują się już wewnątrz ciała.
Warunki brzegowe wiążą znane powierzchniowe
obciążenia zewnętrzne ze stanem naprężenia
wewnątrz ciała.
Przy okazji omawiania warunków brzegowych warto przytoczyć
zasadę de Saint – Venanta
, która brzmi:
Zasada ta umożliwia modyfikację i upraszczanie warunków brzegowych. Wynika z
niej również, że stan naprężenia w pobliżu miejsca przyłożenia obciążenia powinien być
przedmiotem odrębnej analizy. Wiąże się to z naprężeniami stykowymi.
Różne, ale statycznie równoważne układy sił, przyłożone na niewielkiej części
powierzchni ciała, wywołują w punktach dostatecznie oddalonych od strefy działania
obciążenia praktycznie jednakowe stany naprężenia. Przez dostateczne oddalenie od strefy
działania obciążenia należy rozumieć odległość rzędu porównywalnego z liniowymi
wymiarami powierzchni, na którą działa układ sił zewnętrznych.
Rozwiązanie w przemieszczeniach
polega na tym, że w pierwszej kolejności
wyznacza się trzy funkcje określające przemieszczenia
albo
Należy w związku z tym przekształcić podstawowe równania teorii
sprężystości, aby uzyskać układ równań różniczkowych ze względu na przemieszczenia. W
tym celu składowe stanu odkształcenia wyrażone przez przemieszczenia zgodne z
zależnościami B1 wprowadzamy do uogólnionego prawa Hooke’a ( C2 ). Uzyskamy składowe
stanu naprężenia wyrażone przez przemieszczenia, które różniczkujemy i wstawiamy do
warunków równowagi wewnętrznej A. Po przekształceniach otrzymamy warunki równowagi
wewnętrznej wyrażone w przemieszczeniach, czyli trzy równania
Naviera – Lamego
:
( )
j
i
x
u
(
)
3
,
2
,
1
,
=
j
i
(
)
,
,
, z
y
x
u
(
)
,
,
, z
y
x
v
(
)
.
,
, z
y
x
w
(
)
0
,
,
=
+
+
λ
+
i
ji
j
jj
i
X
u
G
Gu
(
)
3
,
2
,
1
,
,
=
k
j
i
(
)
0
2
=
ρ
+
∇
+
∂
ϑ
∂
+
λ
Y
v
G
y
G
(
)
0
2
=
ρ
+
∇
+
∂
ϑ
∂
+
λ
X
u
G
x
G
(
)
0
2
=
ρ
+
∇
+
∂
ϑ
∂
+
λ
Z
w
G
z
G
;
z
w
y
v
x
u
z
y
x
∂
∂
+
∂
∂
+
∂
∂
=
ε
+
ε
+
ε
=
ϑ
-
2
1
2
ν
−
ν
=
λ
G
( 10.25 )
( 10.26 )
albo w notacji inżynierskiej:
stała Lamego
gdzie:
Funkcje
albo
muszą
spełniać układ równań różniczkowych cząstkowych Naviera – Lamego ( 10.25 ) lub ( 10.26 )
oraz warunki brzegowe. Są to warunki naprężeniowe ( 10.23 ) albo ( 10.24 ), które należy
również podać w przemieszczeniach. Aby uzyskać odpowiednie formuły, wystarczy w
naprężeniowych warunkach brzegowych ( 10.23 ) albo ( 10.24 ) składowe stanu naprężenia
wyrazić przez przemieszczenia, w analogiczny do stosowanego przy wyprowadzeniu równań
Naviera -Lamego. Mogą to być również
przemieszczeniowe warunki brzegowe
określające
przemieszczenia albo
na
części lub
na całym brzegu.
Rozwiązanie przestrzennego zadnia brzegowego teorii sprężystości wprost, tzn.
przez całkowanie układu cząstkowych równań różniczkowych jest bardzo trudne. Dlatego
stosuje się różne sposoby ułatwiające uzyskanie choćby przybliżonego rozwiązania.
Wprowadza się w tym celu uproszczone modele geometryczne ciała liniowo – sprężystego,
takie jak pręt, tarcza, płyta czy powłoka.
Stosuje się przybliżone metody rozwiązywania
równań różniczkowych. Korzysta się także z przybliżonych metod numerycznych
rozwiązywania zadań teorii sprężystości, takich jak metoda różnic skończonych, metoda
elementów skończonych czy metoda elementów brzegowych.
Metody te noszą nazwę metod
macierzowych lub komputerowych, ponieważ opierają się na rachunku macierzowym i są
przystosowane do obliczeń za pomocą komputera.
( )
j
i
x
u
(
)
3
,
2
,
1
,
=
j
i
(
)
,
,
, z
y
x
u
(
)
,
,
, z
y
x
v
(
)
z
y
x
w
,
,
( )
j
i
x
u
(
)
3
,
2
,
1
,
=
j
i
(
)
,
,
, z
y
x
v
(
)
z
y
x
w
,
,
(
)
,
,
, z
y
x
u
ROZWIĄZANIE PŁASKIEGO ZADANIA
BRZEGOWEGO TEORII SPRĘŻYSTOŚCI W
NAPRĘŻENIACH.
Wyróżnić trzeba dwa przypadki tego zadania, a mianowicie płaski stan naprężenia
lub odkształcenia. Poszukuje się odpowiednio funkcji
lub
Rozważymy szczegółowo pierwszy przypadek, który
zilustrowano na rys. 10.2, przedstawiającym tarcze przenoszącą obciążenia zewnętrzne q( x, y )
i utwierdzoną na części brzegu.
( )
,
,
y
x
x
σ
( )
,
,
y
x
y
σ
( )
y
x
xy
,
τ
( )
,
, y
x
x
ε
( )
,
,
y
x
y
ε
( )
.
,
y
x
xy
γ
Rys.10.2
Podstawowe równania teorii sprężystości przedstawiają się następująco: >>>
Płaskie zadania teorii sprężystości
Płaskie zadania teorii sprężystości
1
1
F
0
p
0
h
y
a)
n
y
n
n
x
x
b)
h
Płaski stan odkształcenia
Płaski stan naprężenia
0
[ ]
0
0
0
0
x
xy
yx
y
T
σ
σ
τ
τ
σ
⎡
⎤
⎢
⎥
= ⎢
⎥
⎢
⎥
⎣
⎦
1
0
2
1
[ ]
0
2
0
0
0
x
xy
yx
y
ε
γ
ε
γ
ε
⎡
⎤
⎢
⎥
⎢
⎥
⎢
⎥
= ⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
(
)
(
)
1
1 2
1
1 2
z
z
x
y
z
x
y
E
E
ν
ν
σ
ε
ε
ε
ε
ε
ε
ν
ν
ν
ν
⎡
⎤
⎡
⎤
=
+
+
+
=
+
⎢
⎥
⎢
⎥
+
−
+
−
⎣
⎦
⎣
⎦
0,
z
ponieważ
σ
≠
0,
z
ponieważ
σ
≠
0
=
ρ
+
∂
τ
∂
+
∂
σ
∂
X
y
x
xy
x
0
=
ρ
+
∂
σ
∂
+
∂
τ
∂
Y
y
x
y
xy
,
x
u
x
∂
∂
=
ε
,
y
v
y
∂
∂
=
ε
x
v
y
u
xy
∂
∂
+
∂
∂
=
γ
y
x
x
y
xy
y
x
∂
∂
γ
∂
=
∂
ε
∂
+
∂
ε
∂
2
2
2
2
2
(
)
,
1
x
y
y
E
νσ
−
σ
=
ε
(
)
,
1
y
x
x
E
νσ
−
σ
=
ε
G
xy
xy
τ
=
γ
(
)
,
1
2
y
x
x
E
νε
+
ε
ν
−
=
σ
(
)
,
1
2
x
y
y
E
νε
+
ε
ν
−
=
σ
xy
xy
G
γ
=
τ
A. Lokalne warunki równowagi
( 10.28 )
( 10.27 )
( 10.29 )
B. Związki geometryczne
lub
C. Związki fizyczne
( 10.30 )
lub
( 10.31 )
Rozwiązanie płaskiego zadania brzegowego teorii sprężystości w naprężeniach
opiera się na warunkach równowagi wewnętrznej ( 10.27 ) oraz warunku nierozdzielności
przemieszczeń ( 10.29 ) wyrażonym w naprężeniach. Aby otrzymać to trzecie równanie,
wprowadzimy zależność ( 10.30 ) do ( 10.29 ) po uwzględnieniu , że
(
)
ν
+
=
1
2
E
G
(
)
(
)
(
)
⎥⎦
⎤
⎢⎣
⎡
τ
ν
+
∂
∂
∂
=
⎥⎦
⎤
⎢⎣
⎡
νσ
−
σ
∂
∂
+
⎥⎦
⎤
⎢⎣
⎡
νσ
−
σ
∂
∂
xy
x
y
y
x
E
y
x
E
x
E
y
1
2
1
1
2
2
2
2
2
Po wykonaniu różniczkowania i uporządkowaniu uzyskuje się:
(
)
y
x
x
x
y
y
xy
x
y
y
x
∂
∂
τ
∂
ν
+
=
∂
σ
∂
ν
−
∂
σ
∂
+
∂
σ
∂
ν
−
∂
σ
∂
2
2
2
2
2
2
2
2
2
1
2
( 10.32 )
Różniczkujemy pierwsze równanie ( 10.27 ) względem x, a drugie względem y, dodajemy
stronami i wyliczamy, co następuje:
ρ
⎟
⎠
⎞
⎜
⎝
⎛
∂
∂
+
∂
∂
−
∂
σ
∂
−
∂
σ
∂
−
=
∂
∂
τ
∂
y
Y
x
X
y
x
y
x
y
x
xy
2
2
2
2
2
2
( 10.33 )
Po wstawieniu wzoru ( 10.33 ) do ( 10.32 ) i po prostych przekształceniach otrzymujemy
równanie Levy’ego
:
(
)
(
)
ρ
⎟
⎠
⎞
⎜
⎝
⎛
∂
∂
+
∂
∂
ν
+
−
=
σ
+
σ
∇
y
Y
x
X
y
x
1
2
( 10.34 )
Dla przypadku płaskiego stanu odkształcenia, po analogicznych operacjach, równanie
Levy’ego ma następującą postać:
(
)
(
)
ρ
⎟
⎠
⎞
⎜
⎝
⎛
∂
∂
+
∂
∂
ν
−
−
=
σ
+
σ
∇
y
Y
x
X
y
x
1
1
2
(
)
0
2
=
σ
+
σ
∇
y
x
Jeśli siły masowe X, Y mają wartości stałe, równanie Levy’ego dla płaskiego stanu
naprężenia i odkształcenia jest identyczne
( 10.35 )
( 10.36 )
Upoważnia nas to do zajmowania się wyłącznie przypadkiem płaskiego stanu
naprężenia. Poszukiwane funkcje
muszą
spełniać
równania równowagi wewnętrznej ( 10.27 ), równanie Levy’ego ( 10.36 ) oraz
następujące warunki brzegowe:
( )
,
,
y
x
x
σ
( )
,
,
y
x
y
σ
( )
y
x
xy
,
τ
( )
( )
n
y
n
x
q
yx
x
nx
,
cos
,
cos
τ
+
σ
=
( )
( )
n
y
n
x
q
y
xy
ny
,
cos
,
cos
σ
+
τ
=
( 10.37 )
Rozwiązanie płaskiego zadania teorii sprężystości można uprościć, wprowadzając
funkcję
naprężeń Airy’ego
ψ ( x, y )
, za pomocą której można wyrazić składowe stanu naprężenia
następująco:
,
2
2
y
x
∂
ψ
∂
=
σ
,
2
2
x
y
∂
ψ
∂
=
σ
x
Y
y
X
y
x
xy
ρ
−
ρ
+
∂
∂
ψ
∂
−
=
τ
2
( 10.38 )
Łatwo sprawdzić, że jeśli X i Y mają wartości stałe, funkcje ( 10.38 ) spełniają warunki
równowagi ( 10.27 ). Po wstawieniu zależności ( 10.38 ) do równania Levy’ego ( 10.36 ) i
po prostych przekształceniach uzyskuje się
równanie biharmoniczne
ze względu na funkcję
naprężeń:
0
2
4
4
2
2
4
4
4
=
∂
ψ
∂
+
∂
∂
ψ
∂
+
∂
ψ
∂
y
y
x
x
0
4
2
2
=
ψ
∇
=
ψ
∇
∇
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
+
∂
∂
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
+
∂
∂
=
∇
=
∇
∇
2
2
2
2
2
2
2
2
4
2
2
y
x
y
x
( 10.39 )
czyli
( 10.40 )
Funkcja naprężeń
ψ( x, y ) musi być tak dobrana, aby spełniała równanie biharmoniczne,
a składowe stanu naprężenia przez nią wyrażone spełniały warunki brzegowe.
( 10.41 )
gdzie:
Przykład 10.1 >>>
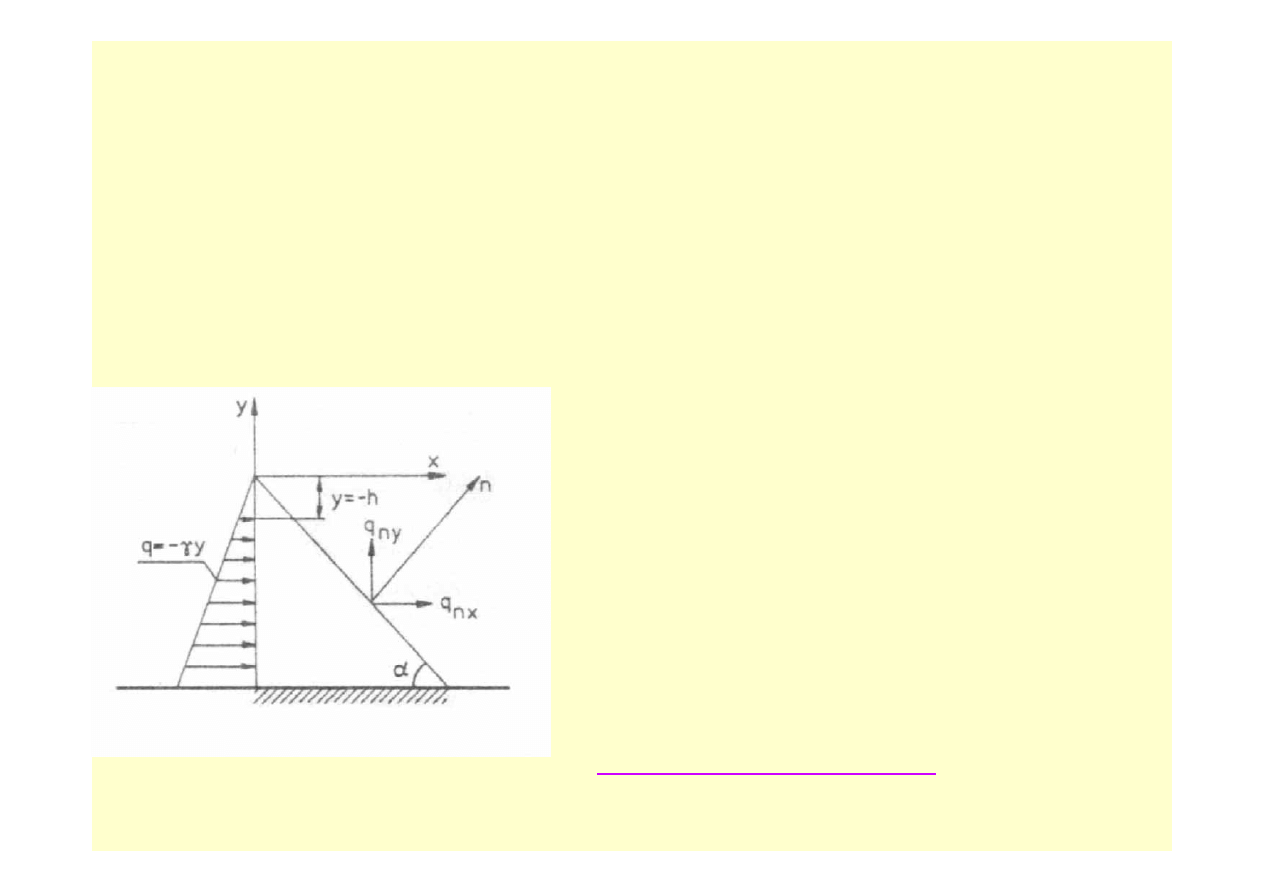
PRZYKŁAD 10.1
Płaska tarcza o grubości równej 1 jest zamocowana i obciążona w sposób pokazany na rys. 4.
Dane:
γ, p – ciężar jednostki objętości materiału tarczy, kąt α.
Poszukujemy rozwiązania w postaci wielomianu trzeciego stopnia
( )
3
2
2
3
,
dy
cxy
y
bx
ax
y
x
+
+
+
=
ψ
( 10.42 )
Funkcja ta może być funkcją naprężeń, ponieważ spełnia równanie biharmoniczne.
Składowe stanu naprężenia wyrażają następująco:
dy
cx
x
6
2
+
=
σ
by
ax
y
2
6
+
=
σ
px
cy
bx
xy
+
−
−
=
τ
2
2
( 10.43 )
Stałe a, b, c, d oblicza się z warunków brzegowych.
WARUNKI BRZEGOWE >>>
Rys.10.3
- na ścianie pionowej
WARUNKI BRZEGOWE:
,
0
=
x
,
0
=
τ
xy
,
0
=
x
y
q
x
γ
=
−
=
σ
,
α
−
= tg
x
y
,
0
=
nx
q
( )
( )
0
cos
cos
=
τ
+
σ
yn
xn
xy
x
,
α
−
= tg
x
y
,
0
=
ny
q
( )
( )
0
cos
cos
=
σ
+
τ
yn
xn
y
xy
1.
2.
3.
4.
- na ścianie pochyłej
gdzie:
( )
,
sin
2
cos
cos
α
=
⎟
⎠
⎞
⎜
⎝
⎛
α
−
π
=
xn
( )
( )
α
= cos
cos yn
Z warunku 1
0
2
=
− cy
0
=
c
Z warunku 2
y
dy
γ
=
6
γ
=
6
1
d
dalej >>>
Z warunku 3
(
)
0
cos
2
sin
6
1
6
=
α
−
−
α
γ
⋅
x
p
b
y
p
b
x
y
−
=
α
α
γ
2
cos
sin
p
b
tg
−
=
α
γ
−
2
2
p
tg
b
2
1
2
1
2
+
α
γ
−
=
Z warunku 4
(
)
(
)
0
cos
6
sin
2
2
=
α
+
α
γ
−
+
α
+
−
α
γ
py
tg
y
ax
px
px
tg
x
0
6
2
3
=
+
α
γ
−
+
α
γ
x
y
p
tg
x
y
a
tg
0
6
3
3
=
α
−
α
γ
+
+
α
γ
ptg
tg
a
tg
0
3
1
6
1
3
=
α
γ
−
α
=
tg
ptg
a
Po wstawieniu stałych a, b, c, d do formuł ( 10.43 ) otrzymuje się ostateczne rozwiązanie:
,
y
x
γ
=
σ
(
)
(
)
,
0
2
2
2
=
α
γ
−
+
α
α
γ
−
=
σ
y
tg
p
tg
tg
p
x
y
x
tg
xy
α
γ
=
τ
2
( 10.44 )
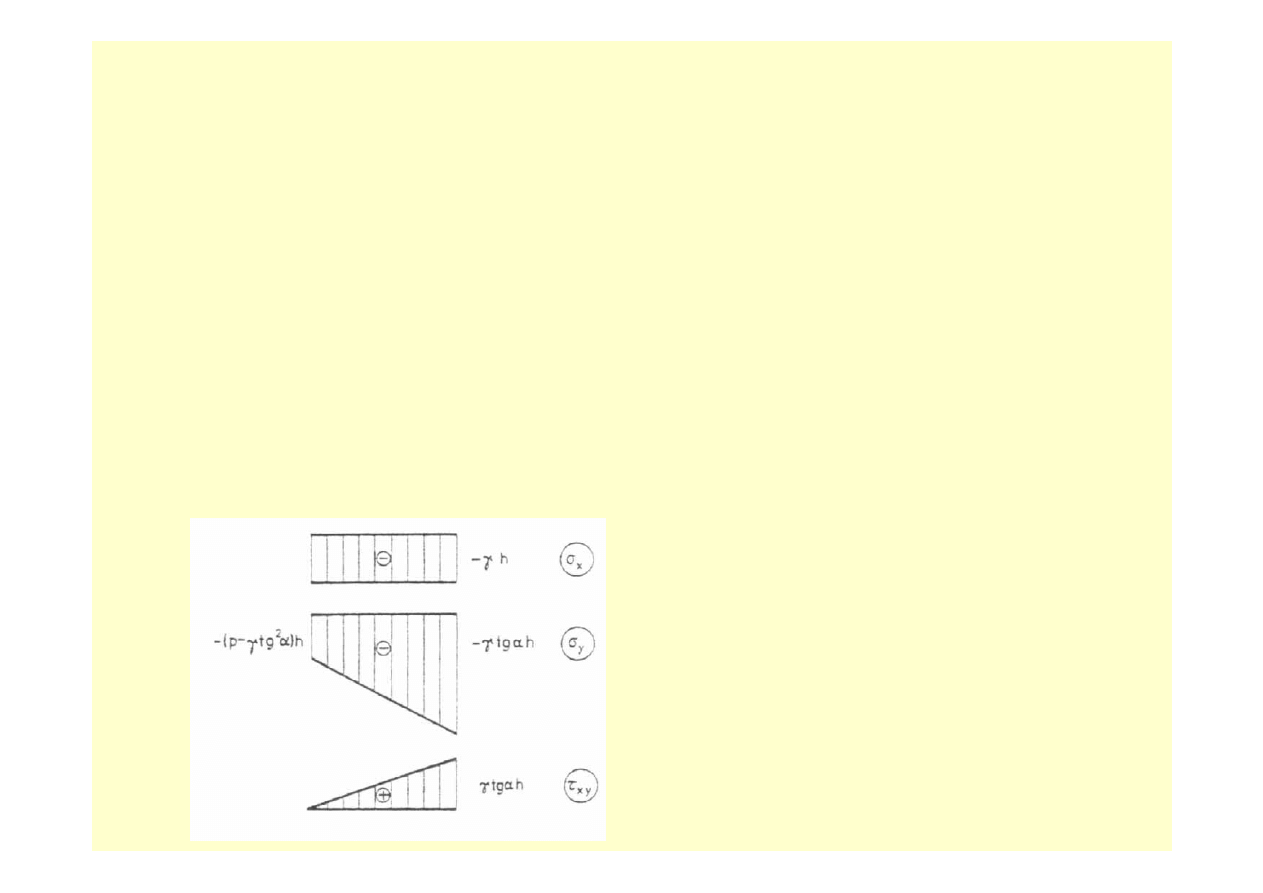
Po wstawieniu y = - h = const otrzymujemy:
y
x
γ
−
=
σ
(
)
(
)
0
2
2
2
=
α
γ
−
−
α
α
γ
−
=
σ
h
tg
p
tg
tg
p
x
y
α
γ
=
τ
2
tg
x
xy
- wartość stała
- funkcja liniowa x
- funkcja liniowa x
( 10.45 )
Formuły ( 10.44 ) są błędne w pobliżu
miejsca utwierdzenia, ponieważ nie są tam
spełnione warunki brzegowe.
Opierając się na formułach ( 10.45 ), można sporządzić wykresy składowych stanu
naprężenia dla h = const ( rys. 10.4 )
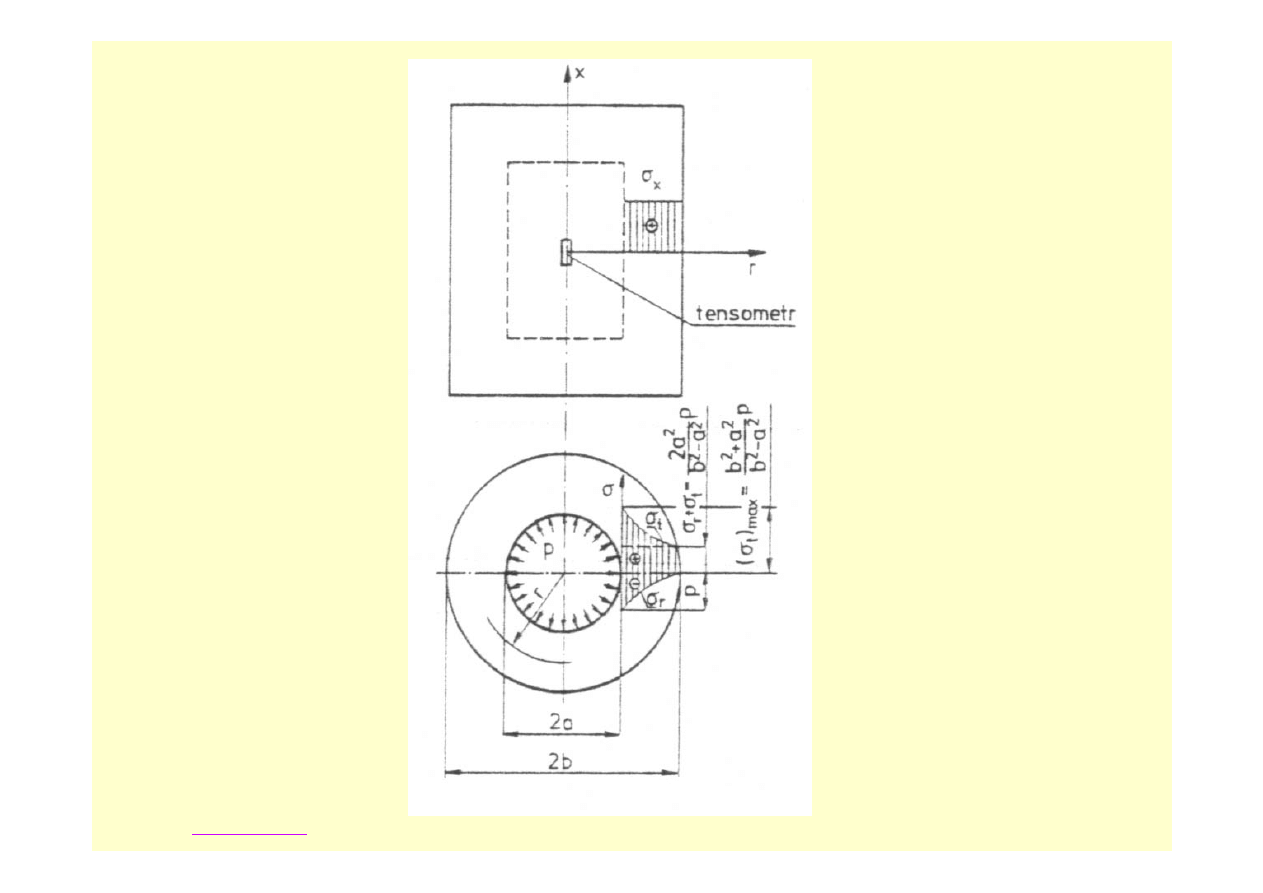
Rys. 10.4
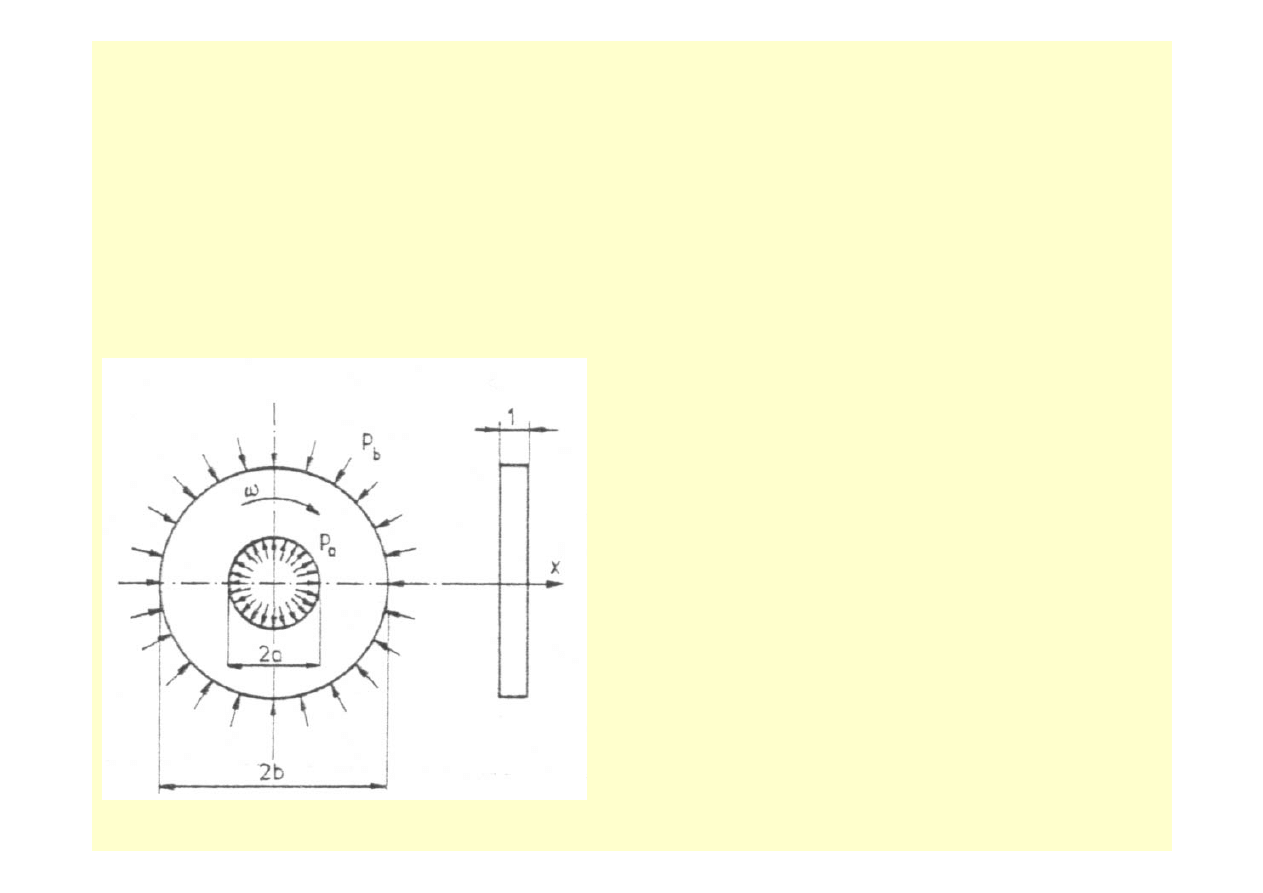
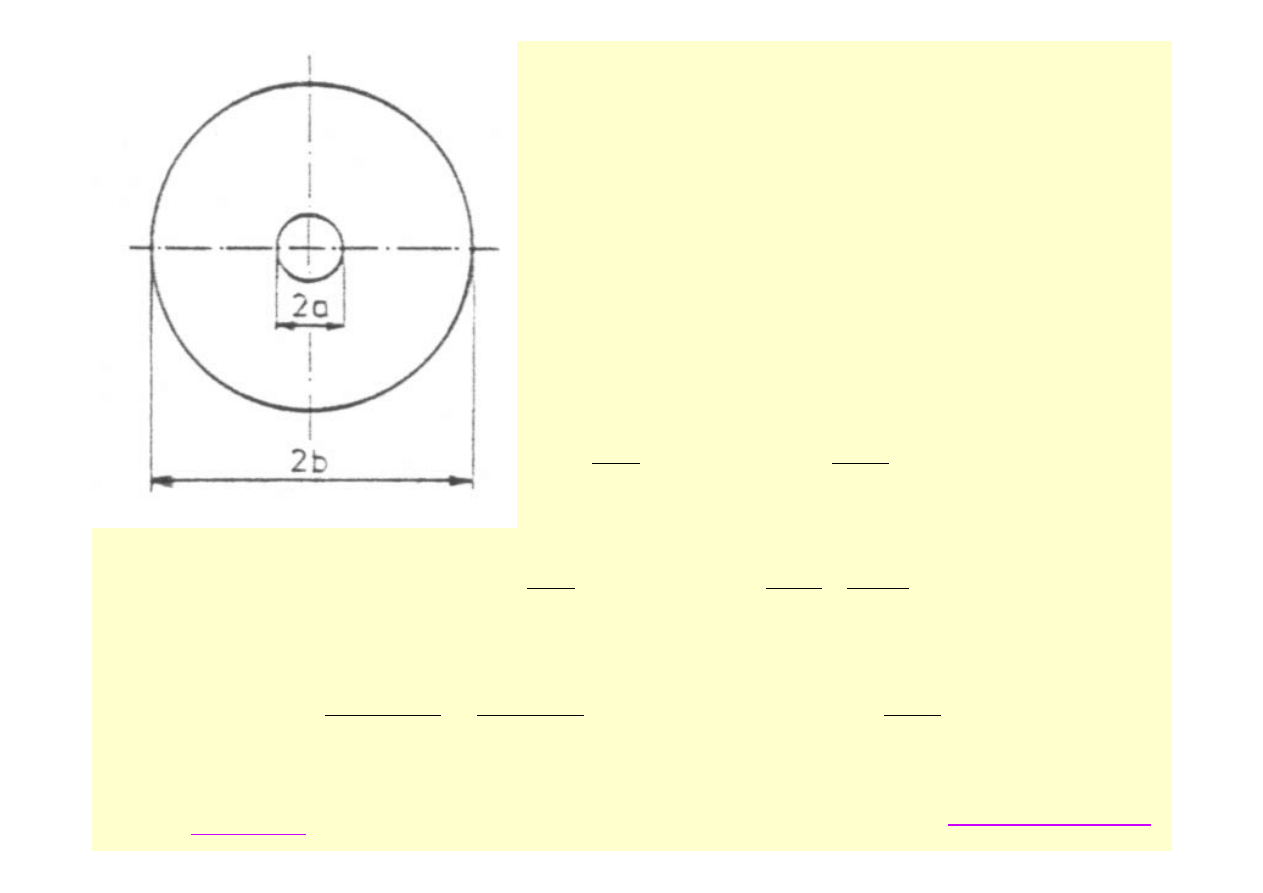
ROZWIĄZANIE PŁASKIEGO
OSIOWOSYMETRYCZNEGO ZADANIA BRZEGOWEGO
TEORII SPRĘŻYSTOŚCI W PRZEMIESZCZENIACH.
Pierścień o promieniu wewnętrznym a i zewnętrznym b oraz grubości 1 wykonany jest z
materiału o znanych stałych sprężystych
ν, E oraz gęstości ρ. Na powierzchni wewnętrznej i
zewnętrznej pierścienia, który wiruje ze stałą prędkością kątową
ω, działa promieniowe
obciążenie powierzchniowe p
a
i p
b
( rys. 10.5 )
Rys. 10.5
Tak sformułowane
płaskie osiowosymetryczne
,
dynamiczne zadanie brzegowe teorii sprężystości
wygodniej będzie rozwiązywać w biegunowym
układzie współrzędnych. Wymaga to
wyprowadzenia odpowiednich podstawowych
równań teorii sprężystości.
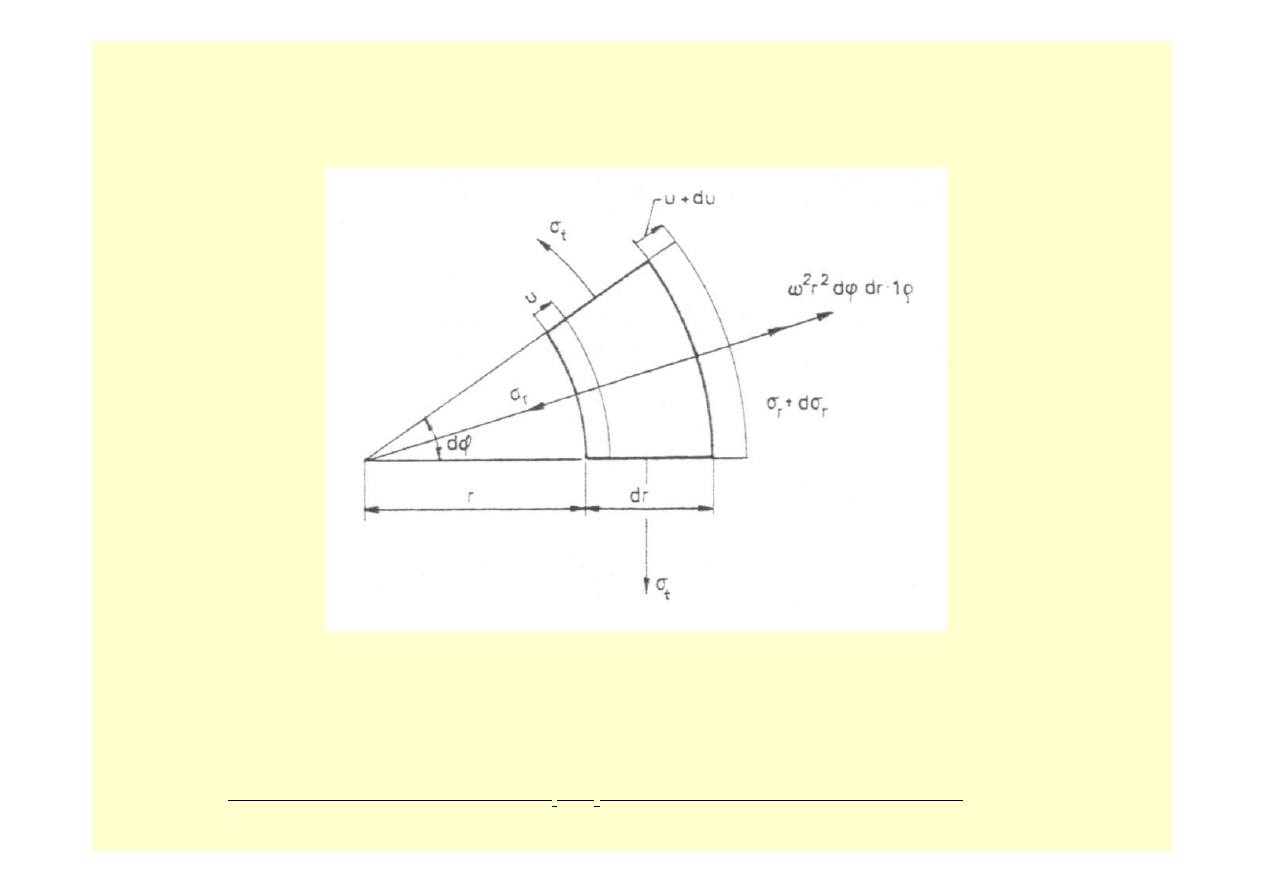
Wytniemy z rozważanego krążka segment ograniczony dwiema powierzchniami walcowymi o
promieniu r i r + dr oraz dwoma płaszczyznami przechodzącymi przez oś obrotu, które tworzą
kąt dwuścienny d
ϕ ( rys. 10.6 )
Ze względu na symetrię, w dowolnej płaszczyźnie przechodzącej przez oś obrotu naprężenie
styczne musi być równe zeru, a wiec jest to płaszczyzna główna stanu naprężenia. Występuje
w niej naprężenie
σ
t
zwane
obwodowym
. Na powierzchniach walcowych występują zatem
również tylko naprężenia normalne, zwane
promieniowymi
, równe odpowiednio
σ
r
oraz
σ
r
+ d
σ
r
. Obydwa naprężenia główne
σ
t
i
σ
r
zależą wyłącznie od promienia r.
Rys. 10.6
Zgodnie z zasadą d’ Alemberta, przyłożymy do segmentu siłę bezwładności równą
iloczynowi masy rd
ϕdrρ i przyspieszenia dośrodkowego ω
2
r, zwróconą od środka na
zewnątrz. Segment obciążony siłami powierzchniowymi oraz siłą bezwładności pozostaje w
równowadze, a więc suma rzutów tych sił na symetryczny kierunek promieniowy musi być
równa zeru:
(
)(
)
0
2
sin
2
2
2
=
ϕ
σ
−
ϕ
σ
−
ϕ
+
σ
+
σ
+
ϕ
ρ
ω
d
dr
rd
d
dr
r
d
drd
r
t
r
r
r
Po uwzględnieniu, że
oraz odrzuceniu małych wyższego rzędu otrzymujemy
równanie równowagi wewnętrznej A:
2
2
sin
ϕ
≈
ϕ d
d
2
2
r
r
dr
d
t
r
r
ρω
−
=
σ
−
σ
+
σ
( 10.46 )
Ze względu na osiową symetrię dowolny punkt tarczy dozna przemieszczenia u w kierunku
promieniowym. Ponieważ u jest funkcją r, wiec dwa punkty odległe od siebie o dr
przemieszczą się odpowiednio o u i u + du. Wynikają z tego następujące związki
geometryczne B:
,
dr
du
r
=
ε
(
)
r
u
r
r
u
r
t
=
π
π
−
+
π
=
ε
2
2
2
( 10.47 )
Odkształcenie promieniowe
ε
r
i obwodowe
ε
t
zależy tylko od r. Są to odkształcenia główne.
Po wyrugowaniu przemieszczenia u z zależności ( 10.47 ) otrzymamy warunek
nierozdzielności odkształceń:
,
r
u
t
ε
=
,
r
dr
d
dr
du
t
t
ε
+
ε
=
t
t
t
r
r
dr
d
ε
+
ε
=
ε
( 10.48 )
Związki fizyczne C będą miały następującą postać:
Rozwiązanie płaskiego osiowosymetrycznego, dynamicznego zadania teorii sprężystości w
przemieszczeniach będzie polegało na znalezieniu w pierwszej kolejności u( r ).
[
]
t
r
r
E
νσ
−
σ
=
ε
1
[
]
r
t
t
E
νσ
−
σ
=
ε
1
[
]
t
r
r
E
νε
+
ε
ν
−
=
σ
2
1
[
]
r
t
t
E
νε
+
ε
ν
−
=
σ
2
1
( 10.49 )
lub
( 10.50 )
Poszukujemy zatem pięciu funkcji
σ
r
( r ),
σ
t
( r ),
ε
r
( r ),
ε
t
( r ) i u( r ), które spełniają równania
A, B, C oraz warunki brzegowe.
Wstawiamy związki geometryczne ( 10.47 ) do prawa Hooke’a ( 10.50 )
⎥⎦
⎤
⎢⎣
⎡
ν
+
ν
−
=
σ
r
u
dr
du
E
r
2
1
⎥⎦
⎤
⎢⎣
⎡
ν
+
ν
−
=
σ
dr
du
r
u
E
t
2
1
( 10.51 )
Składowe stanu naprężenia wyrażone przez przemieszczenie zależnością ( 10.51 )
wprowadzamy do równania równowagi lokalnej ( 10.46 )
2
2
2
2
2
1
1
1
r
dr
du
r
u
E
r
u
dr
du
dr
d
r
E
r
u
dr
du
E
ρω
−
=
⎥⎦
⎤
⎢⎣
⎡
ν
+
ν
−
−
⎥⎦
⎤
⎢⎣
⎡
ν
+
ν
−
+
⎥⎦
⎤
⎢⎣
⎡
ν
+
ν
−
Po obustronnym pomnożeniu przez
i wykonaniu różniczkowania otrzymamy:
E
2
1
ν
−
2
2
2
2
2
1
r
E
dr
du
r
u
r
u
dr
du
r
dr
u
d
r
u
dr
du
ρω
ν
−
−
=
ν
−
−
ν
−
ν
+
+
ν
+
Po uproszczeniu i obustronnym podzieleniu przez r równanie równowagi lokalnej względem
przemieszczenia u( r ) będzie miało postać:
r
E
r
u
dr
du
r
dr
u
d
2
2
2
2
2
1
1
ρω
ν
−
−
=
−
+
( 10.52 )
Lewa strona równania ( 10.52 ) może być zapisana jeszcze krócej
( )
r
E
ur
dr
d
r
dr
d
2
2
1
1
ρω
ν
−
−
=
⎥⎦
⎤
⎢⎣
⎡
( 10.53 )
Po dwukrotnym scałkowaniu otrzymamy:
r
C
r
C
r
E
u
2
1
3
2
2
8
1
+
+
ρω
ν
−
−
=
( 10.54 )
Stałe C
1
i C
2
należy wyliczyć z warunków brzegowych. Znajomość u( r ) umożliwia
wyznaczenie na podstawie zależności ( 10.51 ) składowych stanu naprężenia:
naprężenia promieniowego -
σ
r
( r ) i naprężenia obwodowego -
σ
t
( r )
(
)
(
)
(
)
2
2
2
2
1
2
3
8
1
1
1
1
r
r
C
C
E
r
ν
+
ρω
−
⎥⎦
⎤
⎢⎣
⎡
ν
−
+
ν
+
ν
−
=
σ
(
)
(
)
(
)
2
2
2
2
1
2
3
1
8
1
1
1
1
r
r
C
C
E
t
ν
+
ρω
−
⎥⎦
⎤
⎢⎣
⎡
ν
−
+
ν
+
ν
−
=
σ
( 10.55 )
naprężenie promieniowe
naprężenie obwodowe
W przypadku rury grubościennej ( rys. 10.7 )
ω = 0, a
warunki brzegowe można sformułować następująco:
dla r = a,
σ
r
= -p
a
; dla r = b,
σ
r
= -p
b
, czyli
Rys.10.7
(
)
(
)
a
p
a
C
C
E
−
=
⎥⎦
⎤
⎢⎣
⎡
ν
−
+
ν
+
ν
−
2
2
1
2
1
1
1
1
(
)
(
)
b
p
b
C
C
E
−
=
⎥⎦
⎤
⎢⎣
⎡
ν
−
+
ν
+
ν
−
2
2
1
2
1
1
1
1
Wyliczone z tych równań stałe wynoszą:
2
2
2
2
1
1
a
b
b
p
a
p
E
C
b
a
−
−
ν
−
=
(
)
b
a
p
p
a
b
b
a
E
C
−
−
ν
+
=
2
2
2
2
2
1
Po wstawieniu stałych C
1
i C
2
do zależności ( 10.55 ) oraz
( 10.54 ) otrzymujemy wzory na
naprężenia i przemieszczenia w rurze
:
Warto zauważyć, że
nie zależy od r, a
więc
jest wartością stałą. Innymi słowy, grubość
rozważanego krążka zmienia się we wszystkich jego miejscach jednakowo i
dlatego rurę grubościenną można traktować jako zbiór płaskich tarcz.
2
2
2
2
2
2
2
2
2
a
b
p
p
r
b
a
a
b
b
p
a
p
b
a
b
a
r
t
−
−
−
−
=
σ
m
2
2
2
2
2
2
2
2
1
1
a
b
p
p
r
b
a
E
r
a
b
b
p
a
p
E
u
b
a
b
a
−
−
ν
+
+
−
−
ν
−
=
2
2
2
2
2
a
b
b
p
a
p
b
a
t
r
−
−
=
σ
+
σ
(
)
t
r
x
E
σ
+
σ
ν
−
=
ε
( 10.56 )
( 10.57 )
NAPRĘŻENIA I PRZEMIESZCZENIA W RURZE GRUBOŚCIENNEJ
Przykład 10.2. >>>
PRZYKŁAD 10.2
Zbiornik wysokociśnieniowy stanowi długa rura grubościenna
( rys. 10.8 ) o wymiarach a = 2 cm, b = 3 cm, l =100 cm.
Rozwiązanie >>>
Naprężenia i przemieszczenie w krążkach wirujących >>>
1.
Wyznaczyć nadciśnienie p panujące wewnątrz zbiornika,
jeśli wiadomo, że wywołuje ono na zewnątrz powierzchni
cylindra odkształcenie względne w kierunku tworzącej
ε
x
=10
-4
. Moduł sprężystości E = 2
⋅ 10
5
MPa, a
współczynnik Poissona
ν = 0,3.
2. Narysować wykresy
σ
r
,
σ
t
,
σ
x
.
3.
Obliczyć wg hipotezy maksymalnych naprężeń stycznych
maksymalne naprężenie redukowane w ścianach zbiornika.
Rys.10.8
Stan naprężenia w rurze grubościennej z dnem jest określony
następującymi wzorami:
( 10.58 )
( 10.59 )
( 10.60 )
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
=
σ
2
2
2
2
2
1
r
b
a
b
p
a
r
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
−
=
σ
2
2
2
2
2
1
r
b
a
b
p
a
t
p
a
b
a
x
2
2
2
−
=
σ
To ostatnie wyrażenie otrzymuje się z warunku, że suma rzutów na oś x sił działających na
część zbiornika, odciętą dowolną płaszczyzną prostopadłą do tej osi, musi być równa zeru.
[
]
t
x
x
E
νσ
−
σ
=
ε
1
naprężenie normalne w przekroju
prostopadłym do osi x.
dalej >>>
<<< powrót
(
)
,
2
2
2
p
a
b
a
b
r
x
−
=
σ
=
(
)
2
2
2
2
a
b
p
a
b
r
t
−
=
σ
=
2
2
2
2
2
a
b
p
a
p
a
E
x
−
ν
−
=
ε
(
)
(
)
ν
−
=
−
ε
2
1
2
2
2
p
a
a
b
E
x
(
)
(
)
MPa
62,5
2
1
2
2
2
=
ν
−
−
ε
=
a
a
b
E
p
x
(
)
(
)
MPa
62,5
-
p
-
2
2
2
2
2
2
=
=
−
−
=
σ
=
a
b
a
a
b
pa
a
r
r
(
)
(
) (
)
MPa
62,5
1
2
2
2
2
2
2
2
2
2
2
=
−
+
=
+
−
=
σ
=
a
b
a
b
p
a
a
b
a
b
pa
a
r
t
MPa
50
2
2
2
=
−
=
σ
p
a
b
a
x
MPa
225
=
σ
−
σ
=
σ
r
t
red
nadciśnienie panujące wew. zbiornika
max. naprężenie redukowane
w ścianach zbiornika
<<< powrót
Wykresy naprężeń>>>
<<< powrót
Rys. 10.9
W przypadku krążka wirującego bez otworu
( rys 10.9 ) a = 0, p
a
= 0, p
b
= 0, a warunki
brzegowe sformułować można następująco: dla r =
0 u = 0, dla r = b
σ
r
= 0. Pierwszy warunek
brzegowy może być spełniony tylko wówczas, gdy
C
2
= 0, w przeciwnym bowiem razie ostatni człon
wyrażenia ( 10.54 ) będzie równy
nieskończoności dla r = 0. Po wyliczeniu C
1
i
wstawieniu stałych do wzorów ( 10.55 ) i ( 10.54 )
otrzymujemy :
naprężenia i przemieszczenia
w krążkach wirujących
( 10.61 )
( 10.63 )
( 10.62 )
(
)
(
)
2
2
2
3
8
r
b
r
−
ν
+
ρω
=
σ
(
)
⎟
⎠
⎞
⎜
⎝
⎛
ν
+
ν
+
−
ν
+
ρω
=
σ
2
2
2
3
3
1
3
8
r
b
t
⎟
⎠
⎞
⎜
⎝
⎛
−
ν
+
ν
+
ρω
ν
−
=
2
2
2
2
1
3
8
1
r
b
r
E
u
dalej >>>
<<< powrót
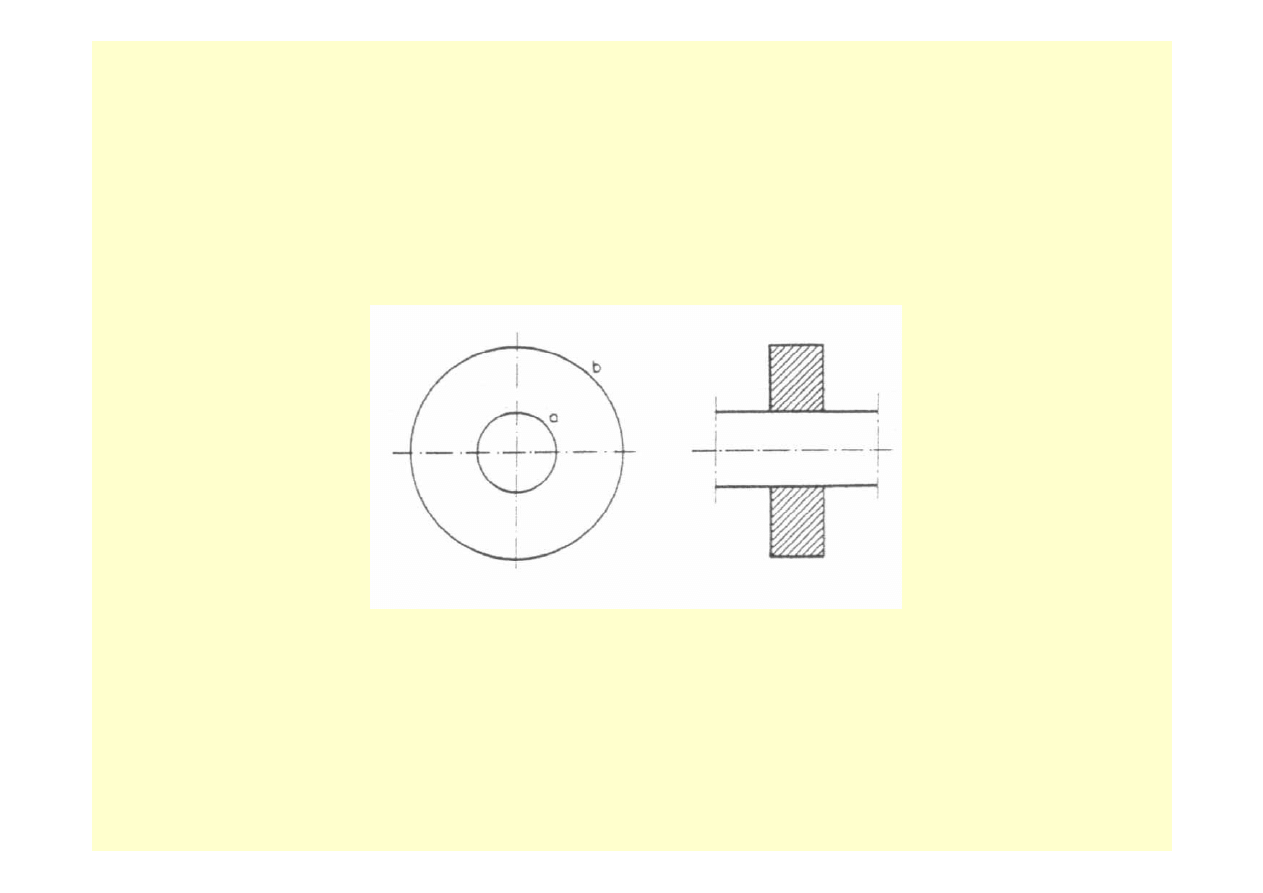
Rys.10.10
Jeśli krążek ma otwór ( rys .10.10 ), warunki
brzegowe sa następujące: dla r = a
σ
r
= 0 i dla
r = b
σ
r
= 0. Wzory na naprężenia i
przemieszczenia przybierają wtedy formę:
( 10.64 )
( 10.66 )
( 10.65 )
(
)
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
+
ν
+
ρω
=
σ
2
2
2
2
2
2
2
3
8
r
r
b
a
a
b
r
(
)
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
ν
+
ν
+
−
+
+
ν
+
ρω
=
σ
2
2
2
2
2
2
2
3
3
1
3
8
r
r
b
a
a
b
t
(
)
( )
(
)
(
)
(
)
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
ν
+
+
+
ν
−
+
ν
+
ν
−
−
ν
+
ρω
=
r
b
a
r
a
b
r
E
u
2
2
2
2
3
2
2
1
1
3
1
8
3
Przykład 10.3 >>>
<<< powrót
PRZYKŁAD 10.3
Na stalowy wał jest nasadzony krążek o stałej grubości. Różnica promieni wału i
otworu
δ = 0,005 mm ( rys. 10.11 ). Obliczyć liczbę obrotów na minutę, przy której
wzajemny nacisk wałka i krążka na powierzchni styku zmaleje do zera. Dane :
E = 2
⋅10
5
MPa,
ν = 0,28, a = 5 cm, b = 40 cm, ρ = 800 kg/m
3
.
Rys. 10.11
Wzajemny nacisk na powierzchni styku zmaleje do zera, jeśli różnica przemieszczeń
punktów leżących na powierzchni otworu i na powierzchni wałka osiągnie wartość:
( )
( )
δ
=
−
=
=
a
r
w
a
r
k
u
u
( 10.67 )
Wał traktujemy jako krążek bez otworu.
Dla wirującego nieobciążonego krążka o średnicy 2b z otworem o średnicy 2a, przy r = a,
otrzymamy:
( 10.69 )
( 10.68 )
(
)
(
)
(
)
(
)
⎥
⎦
⎤
⎢
⎣
⎡
ν
+
ν
−
−
ν
+
+
+
ν
−
ρ
ω
ν
+
=
3
2
2
2
2
2
2
3
1
1
1
8
3
a
a
b
a
a
b
a
E
u
k
Dla wirującego nieobciążonego krążka o średnicy 2a ( w formule ( 10.63 ) oznaczone
2b ) bez otworu i r = a
( )
⎟
⎠
⎞
⎜
⎝
⎛
−
ν
+
ν
+
ρ
ω
ν
−
=
2
2
2
2
1
3
8
1
a
a
E
a
u
w
Po wstawieniu zależności ( 10.68 ) i ( 10.69 ) do ( 10.67 ) otrzymuje się równanie, z
którego można wyliczyć
ω
(
)
(
)
(
)
(
)
( )
δ
=
⎟
⎠
⎞
⎜
⎝
⎛
−
ν
+
ν
+
ρ
ω
ν
−
−
⎥
⎦
⎤
⎢
⎣
⎡
ν
+
ν
−
−
ν
+
+
+
ν
−
ρ
ω
ν
+
2
2
2
2
3
2
2
2
2
2
2
1
3
8
1
3
1
1
1
8
3
a
a
a
E
a
a
b
a
a
b
a
E
czyli
stąd
(
)
δ
=
ρ
ω
ν
+
E
ab
4
3
2
2
(
)
1
-
s
437
3
2
=
ν
+
ρ
δ
=
ω
a
E
b
min
obr
4171
30 =
π
ω
=
n
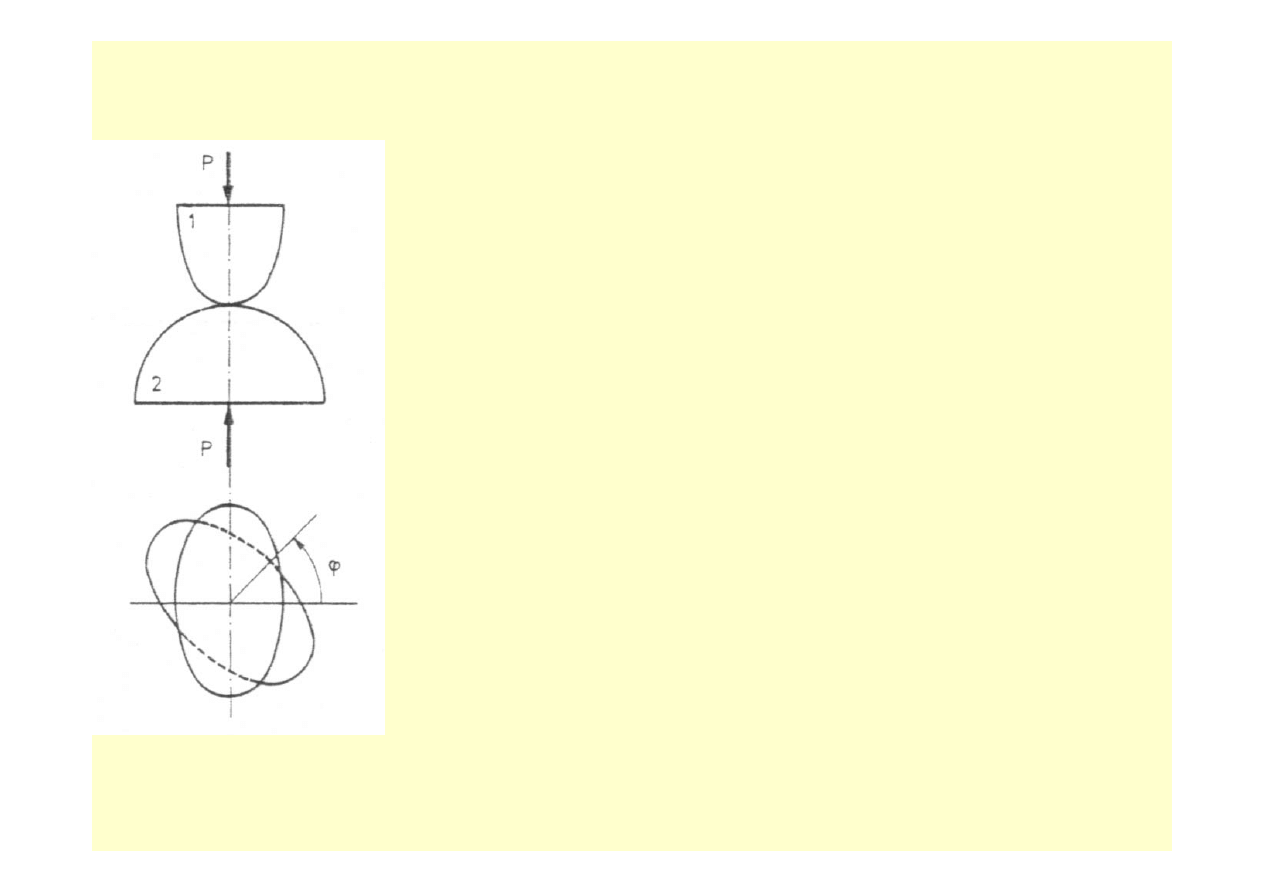
NAPRĘŻENIA KONTAKTOWE
Rys. 10.12
Teorię
naprężeń
stykowych, czyli kontaktowych
opracował Hertz. Jest to zagadnienie geometrycznie nieliniowe. Na
rysunku 10.12 pokazano dwa stykające się ciała. Mają one wspólną
normalną, wspólną płaszczyznę styczną w punkcie styku i są
wzajemnie dociskane siłami P. Dla ciała 1 min i max promień
krzywizny wynosi r
1
i r
1
’
, a stałe sprężyste E
1
i
ν
1
. Dla ciała 2
odpowiednie wielkości wynoszą r
2
i r
2
’
, a stałe sprężyste E
2
i
ν
2
.
Kąt między płaszczyznami największych krzywizn ( czyli
minimalnych promieni krzywizn, r
1
i r
2
) jest równy
ϕ.
Przyjmuje się następujące
założenia
:
2. Powierzchnie zewnętrzne ciał w otoczeniu punktu styku są
gładkie o regularnej krzywiźnie.
3. Odkształcenia ciał są niewielkie.
4.
Powierzchnia styku w stosunku do powierzchni ciał jest mała.
5.
Na powierzchni styku nie ma naprężeń stycznych, a jedynie
normalne.
1. Stykające się ciała są jednorodne, izotropowe i
liniowosprężyste
Po odkształceniu ciał spowodowanym ich wzajemnym dociśnięciem powstaje obszar
styku w postaci elipsy o osiach a i b ( a > b ), które można obliczyć ze wzorów
3
n
m
P
a
α
=
3
n
m
P
b
β
=
,
1
1
1
1
4
'
2
2
'
1
1
r
r
r
r
m
+
+
+
=
)
1
(
)
1
(
3
8
2
2
1
2
1
2
2
1
ν
−
+
ν
−
=
E
E
E
E
n
,
2
m
A
=
ϕ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
2
cos
1
1
1
1
2
1
1
1
1
2
1
'
2
2
'
1
1
2
'
2
2
2
'
1
1
r
r
r
r
r
r
r
r
B
( 10.70 )
gdzie:
przy czym
α i β - współczynniki zależne od B/A, przy:
podane w
tablicy >>>
Tablica. Wartości
α, β, B/A
cd.>>>
0,4930
0,4897
0,4863
0,4828
0,4794
2,731
2,765
2,800
2,837
2,874
0,8661
0,8699
0,8737
0,8774
0,8811
0,6580
0,6359
0,6245
0,6127
0,6006
1,684
1,775
1,826
1,882
1,943
0,6113
0,6521
0,6716
0,6920
0,7126
0,5093
0,5061
0,5029
0,4996
0,4963
2,576
2,605
2,635
2,666
2,698
0,8468
0,8507
0,8545
0,8584
0,8623
0,8114
0,7717
0,7218
0,6992
0,6791
1,262
1,345
1,456
1,540
1,607
0,3204
0,3954
0,4795
0,5342
0,5819
0,5247
0,5217
0,5186
0,5155
0,5124
2,443
2,469
2,494
2,521
2,548
0,8270
0,8310
0,8350
0,8389
0,8428
1,0000
0,9696
0,9318
0,8791
0,8472
1,000
1,032
1,076
1,148
1,198
0,0000
0,0466
0,1075
0,1974
0,2545
β
α
B/A
β
α
B/A
0,3551
0,3223
0,2814
0,2232
5,091
6,159
8,062
12,789
0,9705
0,9818
0,9909
0,9937
0,5366
0,5336
0,5307
0,5277
2,350
2,372
2,395
2,419
0,8110
0,8150
0,8190
0,8230
0,4076
0,4029
0,3981
0,3932
0,3830
3,899
3,986
4,079
4,178
4,395
0,9428
0,9458
0,9488
0,9517
0,9574
0,5508
0,5480
0,5452
0,5423
0,5395
2,245
2,265
2,286
2,306
2,328
0,7907
0,7948
0,7988
0,8029
0,8069
0,4576
0,438
0,4499
0,4460
0,4297
3,132
3,181
3,233
3,286
3,526
0,9030
0,9065
0,9100
0,9134
0,9269
0,5646
0,5618
0,5591
0,5564
0,5536
2,153
2,171
2,189
2,207
2,226
0,7702
0,7743
0,7784
0,7825
0,7866
0,4759
0,4723
0,4687
0,4650
0,4613
2,914
2,954
2,996
3,040
3,085
0,8849
0,8885
0,8922
0,8958
0,8994
0,5881
0,5752
0,5726
0,5699
0,5672
2,011
2,087
2,103
2,119
2,136
0,7332
0,7538
0,7579
0,7620
0,7661
β
α
B/A
β
α
B/A
( )
2
2
1
2
3
,
⎟
⎠
⎞
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
−
π
=
b
y
a
x
ab
P
y
x
p
ab
P
p
π
=
2
3
max
Rozkład
nacisków powierzchniowych
na obszarze styku jest elipsoidą ( rys. 10.13 ) o
następującym równaniu:
Rys. 10.13
( 10.71 )
Wartość p
max
największego ciśnienia na powierzchni styku dla x = 0 i y = 0 wynosi:
( 10.72 )
(
)
'
2
1
2
1
4
P
r
r
r
r
k
b
+
π
=
b
P
p
π
=
'
max
2
( 10.73 )
Jeśli elementy dociskane są walcami o osiach równoległych, obszar styku jest
prostokątem o szerokości 2b, przy czym:
Rozkład nacisków na obszarze styku jest walcem o przekroju półeliptycznym, a p
max
wynosi:
( 10.74 )
Siła docisku na jednostkę
długości wspólnej tworzącej
2
2
2
1
2
1
1
1
E
E
k
ν
−
+
ν
−
=
Największe naprężenie redukowane występuje w tak zwanym
punkcie
Bielajewa
, którego położenie na osi symetrii określa współrzędna z
B
. Według hipotezy
maksymalnych naprężeń stycznych przy
ν = 0,3 dla kołowego obszaru styku ( ściskania
kul ) z
B
/b = 0,481 i
σ
red
/p
max
= 0,620,natomiast dla prostokątnego obszaru styku (ściskania
walców ) z
B
/b = 0,780 i
σ
red
/p
max
= 0,608 . Według hipotezy energii odkształcenia
postaciowego wielkości te zmieniaja się odpowiednio w przedziale od z
B
/b = 0,481 i
σ
red
/p
max
= 0,620 do z
B
/b = 0,697 i
σ
red
/p
max
= 0,567. Wartości naprężenia redukowanego
w punkcie Bielajewa przekraczają często R
e
, a nawet R
m
. Materiał wytrzymuje to,
ponieważ panuje tam stan naprężenia bliski przestrzennemu równomiernemu ściskaniu
( dla takiego stanu naprężenia obydwie hipotezy tracą sens ).
Wartości jednostkowe nacisku dopuszczalnego k
dH
są znaczne, np. dla stali StOS wynoszą
440 MPa, a dla stali 18G2 nawet 880 MPa, ponieważ stany naprężenia w obszarze styku są
bliskie równomiernemu przestrzennemu ściskaniu.
Kryterium nacisku powierzchniowego
można sformułować następująco:
( 10.75 )
dH
k
p
max
≤
LITERATURA
Bąk R., Burczyński T.: Wytrzymałość materiałów z elementami ujęcia
komputerowego. WNT, Warszawa 2000
Wyszukiwarka
Podobne podstrony:
11 Mozaryn T Aspekty trwalosci Nieznany (2)
11 Wytwarzanie specjalnych wyro Nieznany (2)
11 Wycinanie elementow obuwia z Nieznany (2)
11 elektryczne zrodla swiatlaid Nieznany
11 Organy Wladzy Sadowniczej i Nieznany (2)
11 12 2012id 12071 Nieznany (2)
kinetyka 5 11 2010 id 235066 Nieznany
Automatyka (wyk 11 12) ppt [try Nieznany
Podstawowe zagadnienia id 36653 Nieznany
11 Elementy szczegolnej teorii Nieznany (2)
11 Wykonywanie zabiegow zoohigi Nieznany (2)
11. Zagadnienia granic poznania II, Archiwum, Filozofia
Ek 11 Wzrost gospodarczy, 22ma Nieznany
11 Organizowanie prac z zakresu Nieznany
11 Stopy metali niezelaznychid Nieznany
chem fiz 14 11 zad id 111352 Nieznany
11 strategie kooperacjiid 12632 Nieznany (2)
Zenit 11 Instrukcja Obslugi id Nieznany
więcej podobnych podstron