1
Wielkość fizyczna
to każda
mierzalna
właściwość lub cecha
przedmiotu lub zjawiska.
Pomiar
wielkości fizycznej polega na porównaniu danej wiel-
kości fizycznej z wielkością tego samego rodzaju przyjętą
jako wzorzec, jako jednostka miary.
Miarą
wielkości fizycznej
A
jest
iloczyn liczby {A},
która
wskazuje ile razy dana wielkość fizyczna jest większa lub
mniejsza od przyjętej jednostki miary
[A]
i
jednostki miary
użytego wzorca [A]:
A = {A} · [A]
2
Wykonując pomiar trzeba:
Zdefiniować odpowiednią
jednostkę miary,
Użyć właściwego
narzędzie pomiarowe,
Pamiętać, że działania związane z wykonaniem pomiaru
obarczone są
niedokładnościami.
Trzeba poznać zasady ustalania wartości tych niedokład-
ności:
rachunek błędów pomiaru.
Interpretację uzyskanych wyników ułatwia
właściwa prezen-
tacja uzyskanych wyników pomiaru.
Trzeba umieć sporządzać
tabele wyników i wykresy.
W
ielkości podstawowe układu SI
Pozostałe wielkości fizyczne, otrzymane z równań definicyjnych,
tworzą wielkości
pochodne,
a jednostki ich miary oparte na jed-
nostkach podstawowych układu SI nazywamy
jednostkami głów-
nymi.
Prędkość jest wielkością pochodną, bo:
a jej jednostką główną w układzie SI jest:
Wielkość podstawowa
Symbol
Jednostka miary
Długość
L
1 metr
m
Masa
M
1 kilogram
kg
Czas
T
1 sekunda
s
Natężenie prądu elektrycznego
I
1 amper
A
Temperatura
Q
1 kelwin
K
Liczność materii
N
1 mol
mol
Światłość
J
1 kandela
cd
3
Zakres wartości mierzonych wielkości może być bardzo sze-
roki, dlatego oprócz jednostek głównych stosuje się ich wielo-
korotności i podwielokrotności.
Przedrostek
Symbol
Mnożnik
giga
G
10
9
mega
M
10
6
kilo
k
10
3
hekto
h
10
2
deka
da
10
1
decy
d
10
−1
centy
c
10
−2
mili
m
10
−3
mikro
μ
10
−6
nano
n
10
−9
piko
p
10
−12
Najważniejsze właściwości narzędzia pomiarowego:
błąd wskazania (niedokładność wzorcownia),
czułość,
obszar mierniczy, czyli zakres mierzonych wielkości,
wpływ narzędzia pomiarowego na wielkość mierzoną.
Producent narzędzia pomiarowego powinien dostarczyć
informacji o dokładności wskazania przyrządu pomiaro-
wego. Mierniki elektryczne charakteryzuje tzw.
klasa do-
kładności:
gdzie: ΔA
oznacza błąd pomiaru wielkości A,
A
maks
górną granicę zakresu pomiarowego.
4
Gdy
brak
informacji o dokładności wywzorcowania przy-
rządu pomiarowego przyjmuje się, że
błąd pomiaru ró-
wny jest działce elementarnej narzędzia pomiarowego.
Chociaż może wydawać się nam, że wartość możemy
odczytać z większą dokładnością, nie ma to sensu, bo:
Trzeba pamiętać, że dokładnie odczytać nie oznacza
dokładnie zmierzyć.
R
achunek błędów pomiaru
Rozpatrzmy przykład pomiaru długości przy pomocy linijki.
Producent nie podał dokładności wskazania linijki, ale naniósł po-
działkę co 1 mm.
Oznacza to, że gwarantuje możliwość pomiaru długości z dokład-
nością do 1 mm.
I jest to pierwsze źródło błędu tego pomiaru.
Ale to nie jest jedyne źródło niepewności pomiarowej.....
Jaka jest długość tego klocka?
3,2 cm, 3,3 cm a może 3,25 cm?
5
Analizując czynności wykonywane podczas tego pomiaru
znajdujemy kolejne źródła niepewności:
Czy linijka ułożona jest równolegle do klocka?
Czy zero linijki „pokrywa się” z początkiem klocka?
Czy powtarzając pomiar przykładamy linijkę za każdym razem
identycznie?
Biorąc linijkę w rękę ogrzewamy ją; jak jej rozszerzenie wpły-
nie na wynik pomiaru?
Jaką wartość uzyska się wykonując pomiar przy pomocy linijki
wykonanej przez innego producenta?
Są to podstawowe problemy, przed którymi stanie każdy, kto chce
rzetelnie wykonać ten pomiar.
Przykład ten wskazuje, że wykonując jakikolwiek pomiar nie
możemy uniknąć popełnienia błędu pomiaru. Jest on „wpisany”
w procedurę pomiaru.
Błąd wskazania
przyrządu
pomiarowego
Błąd metody pomiaru:
przybliżony wzór,
niewłaściwe wykorzystanie
przyrządu pomiarowego.
6
W wyniku pomiaru otrzymujemy wartość
A
,
jako miarę danej wiel-
kości fizycznej. Nie jest ona jednak równa
rzeczywistej wartości
A
0
mierzonej wielkości fizycznej. Różnicę pomiędzy wielkością zmie-
rzoną i wartością rzeczywistą nazywamy
błędem pomiaru
δA
:
δA A A
0
Wykonując pomiar nie jesteśmy w stanie określić ani wartości
A
0
,
ani
δA
.
Wartość
δA
możemy jedynie
oszacować
(ΔA)
i w ten sposób okre-
ślić przedział, w którym znajduje się rzeczywista wartość
A
0
wielko-
ści mierzonej:
A
0
AΔA, AΔA
Częściej do opisu tego przedziału będziemy korzystać z zapisu:
A ΔA
Postaramy się teraz przedstawić zasady szacowania wartości
ΔA
błędu pomiarowego.
Wykonując kilkakrotnie pomiar tej samej wielkości fizycznej w tych
samych warunkach przy użyciu tego samego narzędzia pomiaro-
wego, można zauważyć, że:
albo:
wyniki kolejnych pomiarów nie różnią się od siebie o więcej
niż najmniejsza działka przyrządu pomiarowego,
albo:
wyniki kolejnych pomiarów różnią się od siebie o więcej niż
najmniejsza działka przyrządu pomiarowego.
W pierwszym przypadku mówimy o
błędzie systematycznym.
W drugim mówimy o
błędzie przypadkowym.
7
Błędy systematyczne
zawsze w ten sam sposób wpływają na wy-
niki pomiarów wykonywanych przy pomocy tej samej metody i apa-
ratury pomiarowej, a ich źródła mogą być następujące:
błąd wskazania przyrządu pomiarowego (określony przez klasę dokładno-
ści przyrządu lub różnicę pomiędzy najbliższymi działkami przyrządu).
Stanowi on podstawową, minimalną wartość błędu systematycznego,
niewłaściwa obsługa przyrządu pomiarowego (konieczne jest przestrze-
ganie instrukcji obsługi przyrządu pomiarowego),
zła metoda pomiaru (np.: pomiar ciśnienia krwi
, pomiar oporu elektrycznego przy pomocy obwodu elektrycznego złożo-
nego z amperomierza i woltomierza),
przybliżony charakter stosowanych wzorów (np.: wyznaczanie przyspie-
szenia ziemskiego g na podstawie pomiaru okresu drgań wahadła pobudzone-
go do dużych wychyleń i wykorzystując do obliczeń podręcznikowy wzór na
okres, który został wyprowadzony przy założeniu małych wychyleń wahadła),
pominięcie wpływu stałych czynników związanych z budową narzędzia
pomiarowego, np. wadliwie wykonana skala przyrządu, jej złe wywzorcowanie
(zła kalibracja) lub „starzenie” się przyrządu, w wyniku czego otrzymuje się
wartości pomiaru zawsze z nadmiarem lub zawsze z niedomiarem,
z przyczyn zawinionych przez eksperymentatora (np.: odczyt z paralaksą).
Oszacowanie wartości błędu systematycznego „sprowadza się” za-
tem do dokładnego przeanalizowania poszczególnych etapów po-
miaru. Wartość tego błędu można zmniejszyć jedynie w wyniku
udoskonalenia stosowanej metody pomiaru i/lub użycia dokładniej-
szych przyrządów pomiarowych.
Dokładne określenie wartości tego błędu nie jest łatwe!!!
W ramach pomiarów wykonywanych w pracowni biofizyki wyzna-
czając błędy systematyczne ograniczymy się do określenia błędu
wskazania przyrządu pomiarowego.
Wracając do przykładu pomiaru długości klocka przy pomocy linijki z podziałką na-
niesioną z dokładnością 1 mm, można stwierdzić, że błąd pomiaru długości wyno-
si co najmniej 1 mm. W warunkach pracowni przyjmujemy, że tyle wynosi wartość
błędu systematycznego pomiaru długości. Zakładamy, że pomiar wykonano na ty-
le rozsądnie, że pozostałe źródła niepewności są małe w porównaniu z dokładnoś-
cią wywzorcowania linijki. Długość klocka wynosi (3,3 ± 0,1) cm.

8
Rozpatrzmy przykład:
Wykonano pomiar napięcia woltomierzem o klasie dokładności 1,5 i
zakresie pomiarowym 250 V. Odczytano wartość napięcia 123,6 V.
Pomiar jest prawdopodobnie obarczony błędem systematycznym.
Jego wartość szacujemy na podstawie
klasy dokładności
przyrzą-
du pomiarowego
:
W rozpatrywanym przypadku:
Zwróćmy uwagę na sposób zapisu błędu.
Zapisując błąd powinniśmy zaokrąglić go do pierwszej cyfry znaczą-
cej, pierwszej różnej od zera cyfry w wyniku obliczeń błędu.
Wskazuje ona miejsce dziesiętne, na którym występuje błąd.
Szerokość przedziału, w którym znajduje się rzeczywista wartość
wielkości mierzonej zależy od oszacowanej wartości błędu. Stąd,
aby nie zawężać tego przedziału, należy zawsze wartość błędu zao-
krąglać w górę.
W rozpatrywanym przykładzie:
ΔU = 3,75 V ≈ 4 V
Czasami jednak zaokrąglenie wartości błędu w górę, do pierwszej cyfry
znaczącej, zbyt mocno zwiększa jego wartość, np. zaokrąglenie wartości
błędu pomiaru masy Δm =109 mg do wartości 200 mg
.
W sytuacji, gdy zaokrąglenie błędu w górę, do pierwszej cyfry zna-
czącej, zwiększa wartość błędu o więcej niż 10% jego wartości,
pozostawia się w wyniku błędu 2 pierwsze cyfry znaczące.
Ale nigdy w błędzie nie może być trzech lub więcej cyfr znaczących.
9
Stąd poprawnie zaokrąglając wartość błędu pomiaru masy:
zamiast Δm = 200 mg napiszemy Δm =110 mg
(zero na końcu nie jest znaczące).
Następnie możemy przystąpić do zaokrąglania wyniku pomiaru.
Wynik pomiaru zaokrąglamy do miejsca dziesiętnego, na
którym kończy się błąd pomiaru po jego prawidłowym za-
okrągleniu.
Poprawny zapis rozpatrywanego przez nas wyniku pomiaru ma po-
stać:
U =
(123,6 ± 3,75) V ≈
(124 ± 4) V
Wynik pomiaru i błąd przed
zaokrągleniem:
(136,521 ± 0,115) cm
(136,521 ± 0,195) cm
(0,036255 ± 0,000111) m
(65,273 ± 0,321)·10
3
μF
(251,6767 ± 0,07943) mA
(379823,1245 ± 1245,75) cm
2
Wynik pomiaru i błąd po
zaokrągleniu:
(136,52 ± 0,12) cm
(136,5 ± 0,2) cm
(0,03626 ± 0,00012) m
(65,27 ± 0,33) nF
(251,68 ± 0,08) mA
(379800 ± 1300) cm
2
= (37,98 ± 0,13) m
2
Przykłady zaokrąglania wartości błędu pomiaru i wyniku pomiaru:
10
Zwróćmy uwagę na różne sposoby zapisu błędu pomiaru:
błąd bezwzględny, np.: błąd pomiaru długości ΔL = 0,1 cm,
wtedy piszemy L = (3,3 0,1) cm,
błąd względny, , w naszym przypadku ,
błąd względny procentowy
, w naszym przypadku 3,1%,
w postaci przedziału L 3,2; 3,4 cm.
Błędy przypadkowe
Gdy wykonujemy pomiary przy użyciu przyrządów pomiarowych o
dużej dokładności (gdy błąd wskazania przyrządu jest mały), zda-
rza się często, że wyniki kilku kolejnych pomiarów różnią się od
siebie o wartość większą od dokładności przyrządu pomiarowego.
W takim przypadku mówimy, że pomiary obarczone są
błędem przypadkowym.
Ich źródło może być różnej natury:
związane z właściwościami mierzonej wielkości fizycznej
pomiar tętna poszczególnego osobnika, czy pomiar tętna w danej populacji,
pomiar średnicy drutu itp.,
związane z właściwościami przyrządu pomiarowego
tarcie łożysk w wadze, drgania lusterka w galwanometrze itp.,
zawinione przez eksperymentatora
przy pomiarze czasu stoperem - różne chwile włączenia i wyłączenia stopera
przy kolejnych pomiarach czasu itp.
11
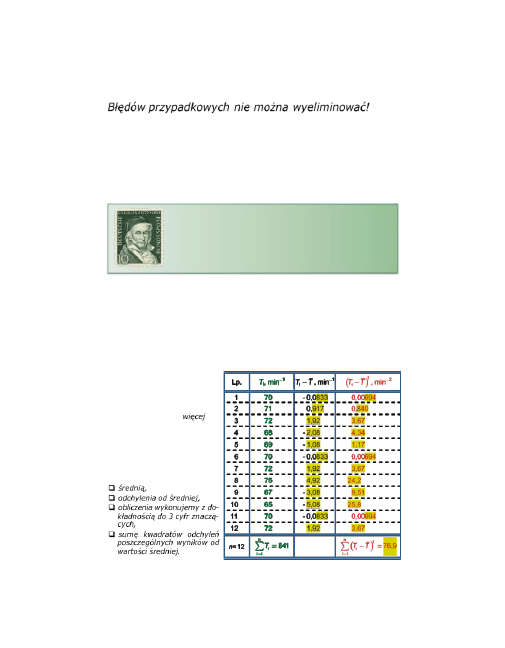
Błędów przypadkowych nie można wyeliminować!
Można jednak, w odróżnieniu od błędów systematycznych, dokła-
dnie określić ich wartość.
Sposób szacowania wartości błędów przypadkowych wyjaśnia te-
oria Gaussa.
Istotę tej metody wyjaśnimy na przykładzie pomiaru tętna pew-
nego osobnika. Wyniki pomiaru zebrano w poniższej tabeli.
Carl Friedrich
Gauss, ur. 30 IV 1777, Brunszwik, zm. 23 II
1855, Getynga, niem. matematyk, fizyk, astronom i geodeta;
profesor uniw. i dyr. obserwatorium astr. w Getyndze; rozwinął
m.in. teorię liczb, geometrię nieeuklidesową, teorię funkcji
zespolonych; zajmował się też elektrycznością, magnetyzmem,
teorią potencjału.
Widzimy, że wyniki kilku kolej-
nych pomiarów tętna dla tego
samego osobnika, wykonanych
w tych samych warunkach, róż-
nią się od siebie o więcej niż
błąd wskazania przyrządu po-
miarowego; trzeba zatem wyko-
nać
co najmniej 10 pomiarów.
Dalej wykonujemy obliczenia,
tak jak wskazuje tabela.
Obliczamy kolejno:
średnią,
odchylenia od średniej,
obliczenia wykonujemy z do-
kładnością do 3 cyfr znaczą-
cych,
sumę kwadratów odchyleń
poszczególnych wyników od
wartości średniej.
12
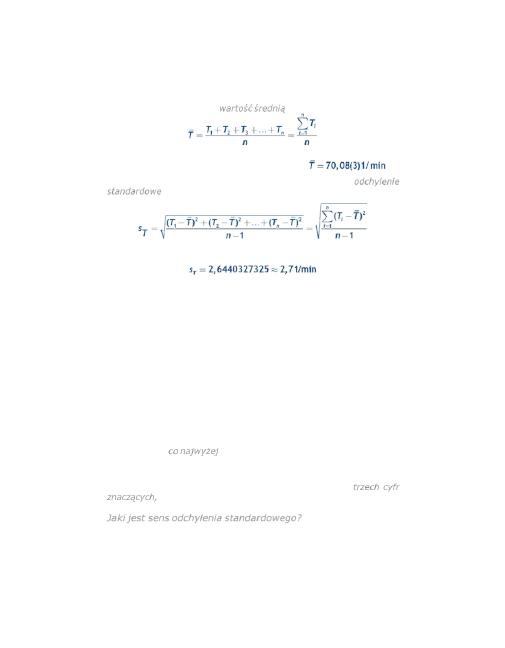
Jako oczekiwaną (najbardziej prawdopodobną) wartość tętna badane-
go osobnika przyjmuje się
wartość średnią
określoną wzorem:
gdzie: n oznacza liczbę wykonanych pomiarów.
W naszym przypadku z obliczeń otrzymujemy:
Miarą błędu pomiarów w takim przypadku, jest tak zwane
odchylenie
standardowe
(średnie odchylenie kwadratowe, błąd średni poszczególnego po-
miaru)
zdefiniowane wzorem:
W rozpatrywanym przypadku wartość liczbowa odchylenia standardowe-
go wynosi:
Teraz rozumiemy dlaczego w powyższej tabeli zamieszczono dodat-
kowe kolumny, ułatwiają one obliczenie wartości odchylenia standar-
dowego.
Odchylenie standardowe jest miarą błędu pomiaru; zaokrąglamy je-
go wartość zgodnie z przyjętymi zasadami zaokrąglania błędów po-
miarowych do co najwyżej 2 cyfr znaczących.
Ponieważ końcowa wartość błędu nie może posiadać więcej niż 2 cyf-
ry znaczące, w pośrednich rachunkach związanych z szacowaniem
błędu, wystarczy prowadzić obliczenia z dokładnością do trzech cyfr
znaczących, tak jak to zostało przedstawione w tabeli.
Jaki jest sens odchylenia standardowego?
Wyjaśnimy to na przykładzie
bardziej licznej
próby pomiarów tętna...
13
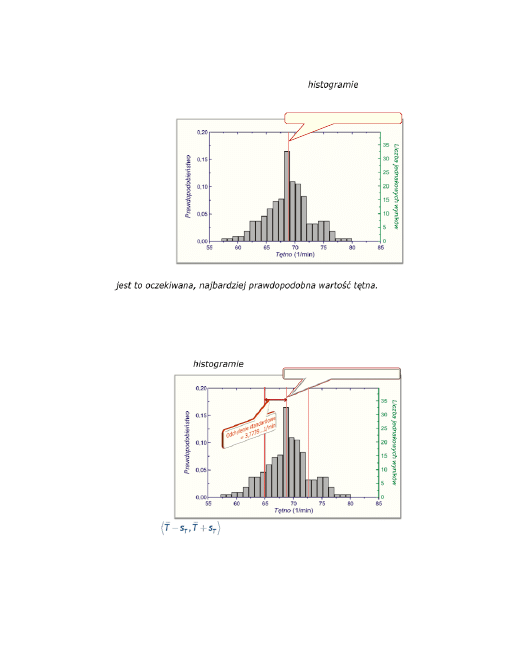
Zaznaczmy wartość średnią..
Wyniki tych pomiarów ilustrujemy na poniższym histogramie.
Zaznaczmy wartość średnią.. i już rozumiemy co oznacza stwierdzenie,
że jest to oczekiwana, najbardziej prawdopodobna wartość tętna.
Prawdopodobieństwo danego wyniku równe jest stosunkowi liczby danych
wyników do liczby wszystkich wyników.
Wartość średnia = 69,8134... 1/min
Wartość średnia = 69,8134... 1/min
Zaznaczmy teraz na histogramie odchylenie standardowe.
W przedziale
znajduje się 147 wyników pomiaru tętna z
218 wszystkich pomiarów, czyli około
68%
wyników.
Musimy się zatem zgodzić z następującą interpretacją odchylenia stan-
dardowego....
14
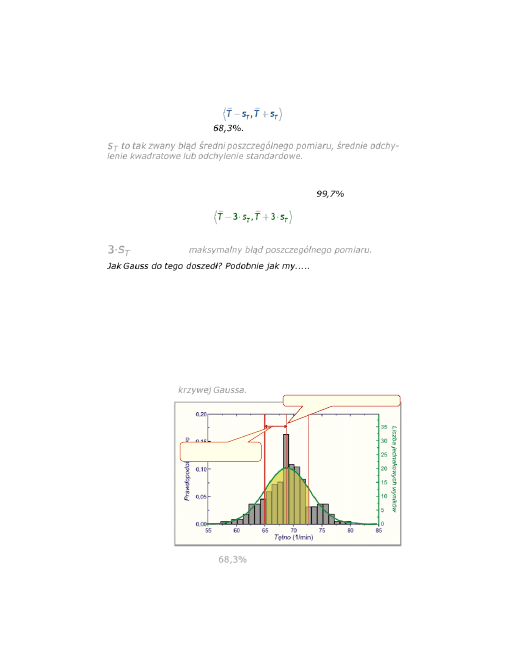
Zgodnie z teorią Gaussa wartość tętna i-tego pomiaru leży w przedziale:
z prawdopodobieństwem 68,3%.
s
T
to tak zwany błąd średni poszczególnego pomiaru, średnie odchy-
lenie kwadratowe lub odchylenie standardowe.
Określony wyżej przedział trzeba zwiększyć, aby zwiększyć szansę
znalezienia się w nim kolejnego pomiaru.
Wartość i-tego pomiaru z prawdopodobieństwem 99,7% leży w prze-
dziale trzykrotnie szerszym:
o ile wykonano co najmniej 10 pomiarów.
3·
s
T to tak zwany maksymalny błąd poszczególnego pomiaru.
Jak Gauss do tego doszedł? Podobnie jak my.....
Wartość średnia = 69,8134... 1/min
Zauważył, że gdyby pomiarów było bardzo dużo to histogram miałby
następującą postać...
Przyjąłby kształt krzywej Gaussa.
Zaznaczone pole stanowi
68,3%
całego pola pod krzywą Gaussa.
Odchylenie standardowe
= 3,7739...1/min
15
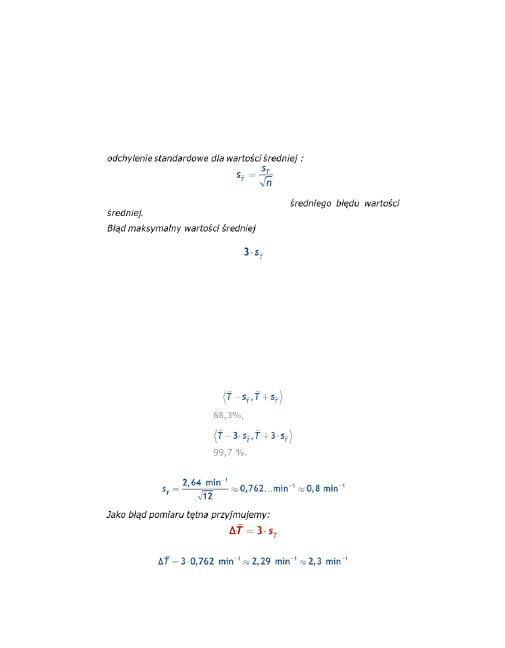
Teoria Gaussa dostarcza jeszcze dodatkowych informacji o wykona-
nych pomiarach. Bez wykonywania następnych kilku serii pomiaro-
wych możemy, na podstawie jednej serii pomiarowej, określić tzw.
odchylenie standardowe dla wartości średniej :
Parametr, który opisuje rozkład średnich z wielu serii pomiarowych.
Wielkość ta stanowi miarę tak zwanego średniego błędu wartości
średniej.
Błąd maksymalny wartości średniej dla próbki zawierającej więcej niż
10 pomiarów określony jest wzorem:
Zatem na podstawie jednej serii pomiarowej możemy wnioskować, że
rzeczywista wartość średnia znajduje się w przedziale:
z prawdopodobieństwem 68,3%,
a w przedziale:
z prawdopodobieństwem 99,7 %.
W rozpatrywanym przez nas przykładzie n=12−krotnego pomiaru tę-
tna:
Jako błąd pomiaru tętna przyjmujemy:
W rozpatrywanym przypadku:
16
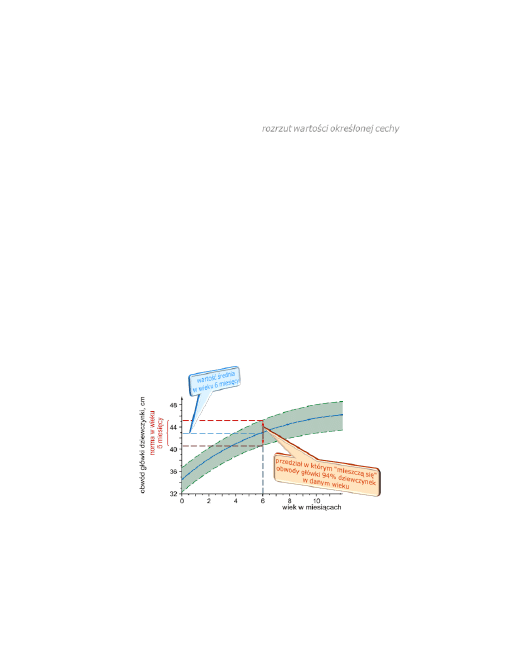
Metodą Gaussa można także określić
rozrzut wartości określonej cechy
elementów pewnego zbioru. Jeśli cecha (np. średnica krwinki) pewnej
populacji zmienia się i przyjmuje wartości różniące się od siebie o war-
tość większą niż dokładność użytego narzędzia pomiarowego, to odchy-
lenie standardowe określa rozrzut wartości tej cechy.
W takim przypadku trzykrotna wartość odchylenia standardowego jest
miarą wielkości przedziału, w którym znajduje się 99,7% otrzymanych
wyników (przedział, w którym znajduje się średnica 99,7% krwinek
danej populacji).
Zatem wykorzystując odchylenie standardowe można określać różne
normy i wykreślać normogramy,
np. tzw. siatka centylowa .........
Obwód główki dziewczynki w funkcji jej wieku.
Linia ciągła wyznacza wartość średnią, linie przerywane wyznaczają
przedział, którego szerokość zależy od wartości odchylenia standar-
dowego w danym wieku.
17
Błąd wielkości złożonej
Poznaliśmy metody umożliwiające określenie wartości liczbowej błędu
pomiaru bezpośredniego. Teraz trzeba wyjaśnić, jak postąpić w przy-
padku wyznaczania błędów pomiaru wielkości złożonej.
Zmierzono boki prostokąta a i b? Jaką powierzchnię ma ten prostokąt?
Bezpośrednie pomiary długości boków prostokąta obarczone są błędem
systematycznym i wynoszą odpowiednio:
a = (25,7
±
0,1) cm i b = (5,7
±
0,1) cm.
Pole prostokąta S = a·b, jest wielkością złożoną:
S = 25,7·5,7 cm
2
= 146,49 cm
2
W jaki sposób oszacować błąd pomiaru pola?
Można to zrobić dwoma sposobami:
w oparciu o liczbę cyfr znaczących w wynikach bezpośrednich
i bardziej formalnie ....
Im więcej cyfr znaczących ma wynik pomiaru tym pomiar jest dokładniej-
szy. Zatem można sądzić, że liczba cyfr znaczących występujących w wy-
niku pomiarów złożonych zależy od liczby cyfr znaczących występujących
w czynnikach zmierzonych bezpośrednio.
O liczbie cyfr znaczących w końcowym wyniku decyduje czynnik najmniej
dokładny.
Wynik końcowy ma tyle cyfr znaczących ile czynnik, który ma ich
najmniej.
a = (25,7 ± 0,1) cm
ma 3 cyfry znaczące i
b = (5,7 ± 0,1) cm
ma dwie,
więc zgodnie z omówioną regułą wynik końcowy winien mieć tylko dwie
cyfry znaczące:
S = 25,7·5,7 cm
2
= 146,49 cm
2
15
0 cm
2
Oczywiście nie wiemy ile wynosi błąd
S
,
ale podejrzewamy, że jest na
miejscu dziesiętnym ostatniej cyfry znaczącej wyniku, czyli na miejscu
dziesiątek i wynik zapiszemy w postaci:
S = (
15
0 ±
1
0) cm
2
18
Można też obliczyć możliwe największą wartość pola:
S
maks
= (25,7+0,1)·(5,7+0,1) cm
2
= 149,64 cm
2
i najmniejszą:
S
min
= (25,7−0,1)·(5,7−0,1) cm
2
= 143,36 cm
2
Zatem pole prostokąta leży w przedziale:
<
143,36 cm
2
; 149,64 cm
2
>
Co możemy zapisać w postaci:
S = (146,5 ± 3,14) cm
2
≈ (146,5 ± 3,2) cm
2
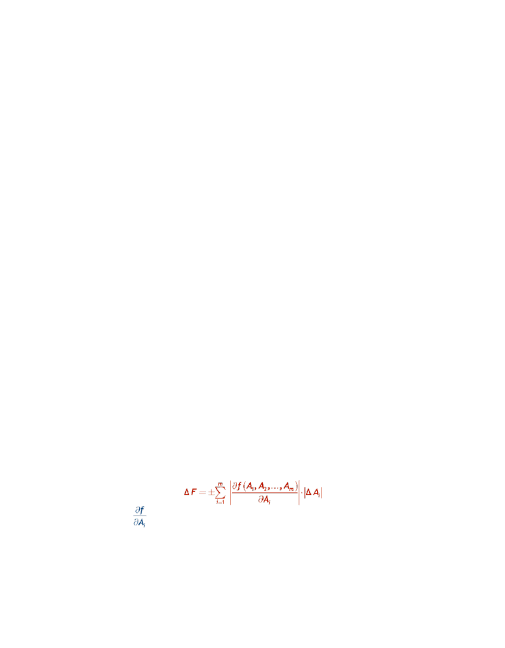
Można też skorzystać z bardziej „matematycznej” recepty obliczania
błędu pomiaru wielkości złożonej.
Załóżmy, że wykonano
m
pomiarów bezpośrednich wielkości
A
i
(i=1,2,3,.,m)
i oszacowano błędy tych wielkości
ΔA
i
.
Interesuje nas wartość
F
i błąd
ΔF
wielkości
złożonej
wyrażonej, jako
funkcja
f
bezpośrednio zmierzonych wielkości
A
i
:
F = f (A
1
, A
2
,...., A
m
)
Maksymalny błąd
ΔF
pomiaru obliczamy wtedy z zależności:
gdzie oznacza tak zwane pochodne cząstkowe f względem A
i
.
19
Rozpatrzmy kilka szczególnych postaci funkcji
f:
jeśli zmierzone bezpośrednio wielkości są dodawane lub odejmo-
wane, to błąd wyniku
(sumy lub różnicy)
jest
zawsze sumą błędów
wielkości zmierzonych bezpośrednio:
jeśli
F = A +/− B
, wtedy zawsze
ΔF = ΔA + ΔB
,
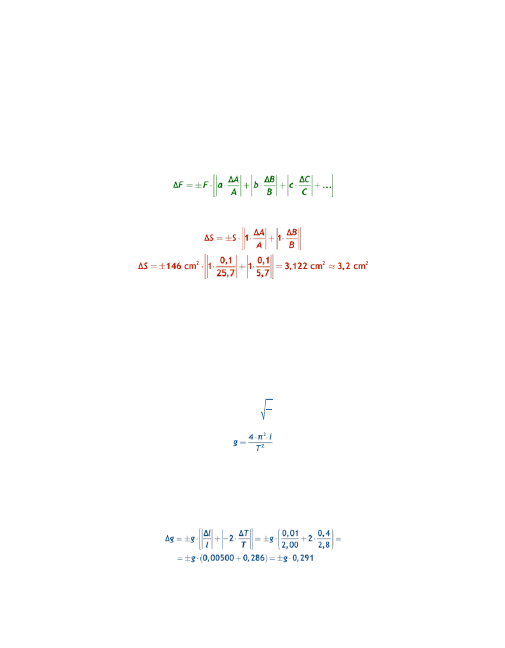
jeśli funkcja
f
ma postać iloczynową:
F = f (A, B, C,…) = A
a
· B
b
· C
c
·…
to błąd wielkości złożonej ΔF oblicza się ze wzoru:
Jeśli zastosować ten schemat do obliczanego pola
prostokąta S = A
1
·B
1
,
to błąd pola
ΔS
obliczymy ze wzoru:
I dalej:
Zauważmy dużą zgodność wszystkich obliczeń wartości błędu.
2
l
T
π
g
Przykład:
Wyznaczenie wartości przyspieszenia ziemskiego g na podstawie pomiaru
okresu T drgań wahadła matematycznego o długości l:
Po przekształceniu wzoru otrzymuje się:
Wyznaczenie g wymaga bezpośredniego pomiaru T i l.
Pomiar l = (2,00±0,01) m obarczony był błędem systematycznym. Z ko-
lei okres drgań mierzono stoperem z dokładnością ±0,2 s. Stwierdzono
rozrzut wyników pomiaru większy niż 0,2 s. Zatem pomiar obarczony był
błędem przypadkowym. Na podstawie wykonanych 10 pomiarów okresu
drgań wahadła matematycznego otrzymano wartość T = (2,8±0,4) s.
Błąd przyspieszenia obliczymy z wzoru:
20
2
2
2
2
2
4
4 3,142 2,00
m
10,073636...
2,8
s
π l
g
T
2
m
Δ
10,1 0,291
2,94...
3
s
g
2
m
(10 3)
s
g
Warto zauważyć, że pośrednie obliczenia błędu wykonywano z dokładno-
ścią do 3 cyfr znaczących (dlaczego?). Teraz wystarczy obliczyć wartość g:
zatem:
i ostatecznie:
Zastosujmy teraz do oszacowania błędu pomiaru g receptę o cyfrach znaczących.
l
= (2,00 ± 0,01) m ma trzy cyfry znaczące,
T = (2,8 ± 0,4) s
ma dwie cyfry znaczące.
Obliczona wartość przyspieszenia ziemskiego może mieć tylko dwie cyfry znaczące.
Po zaokrągleniu g do dwóch cyfr znaczących otrzymamy wartość g = 10 m/s
2
.
Ostatnia cyfra tego wyniku (0) jest cyfrą niepewną, o czym informuje zapis:
g = (10 ± 1) m/s
2
Umiejętność takiego szacowania błędów pomiaru jest niezwykle praktyczna.
Opracowywanie wyników pomiarów
Jeżeli badane są zależności pomiędzy wielkościami, powiedzmy x
i y, w celu ułatwienia analizy otrzymanych danych, wyniki pomia-
rów winny być odpowiednio zaprezentowane:
uszeregowane i zebrane w odpowiedniej tabeli,
przedstawione na odpowiednim wykresie.
Na poniższym rysunku przedstawiono przykład poprawnie sporzą-
dzonego wykresu. Zaznaczono na nim niezbędne elementy zapew-
niające jego czytelność i przejrzystość.
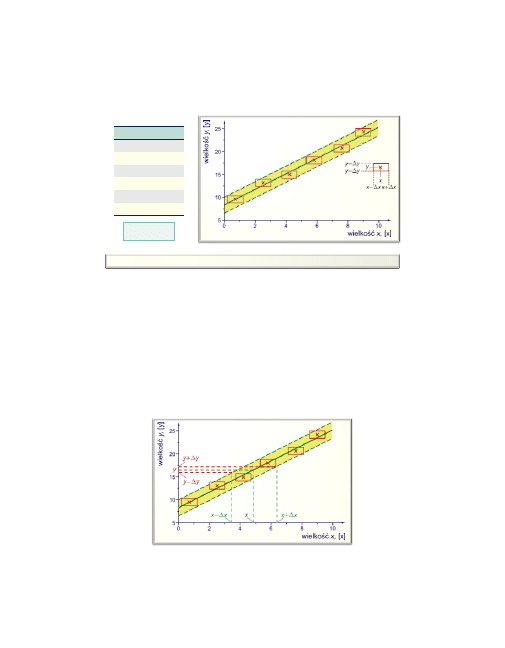
21
Dobieramy jednostki.....
Sporządzamy wykres ........
Analizujemy otrzymane wyniki:
Zaznaczamy błędy pomiarów (prostokąty błędów) ..
Przeprowadzamy „linię najlepszego dopasowania” ....
Zaznaczamy „krzywe ufności”...
lp
x [x] y [y]
1
0,7
9,5
2
2,5
13,1
3
4,2
14,9
4
5,8
18,0
5
7,6
20,6
6
9,0
24,2
Δx=±0,5 [x]
Δy=±0,8 [y]
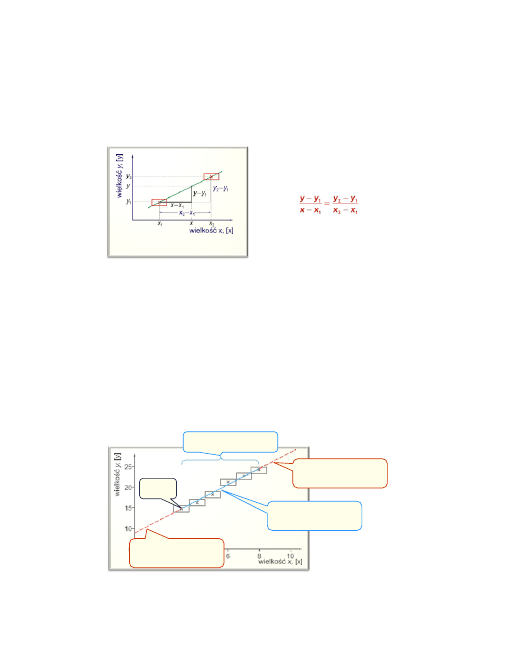
Często na wykresie zaznacza się także przebieg tzw. „krzywych uf-
ności”, które biegną równolegle do linii najlepszego dopasowania i
„obejmują” prostokąty błędów.
Wykreślenie krzywych ufności umożliwia np. oszacowanie błędu Δx niezna-
nej wielkości x, która odpowiada znanej (zmierzonej) wartości y ± Δy.
Rycina ilustruje sposób szacowania wielkości x i Δx. Dla dokładnego wyz-
naczenia tych wielkości może być przydatna
metoda interpolacji liniowej.
22
Z ryciny tej, dla zaznaczonych na
niej wielkości po zastosowaniu twie-
rdzenia Talesa, wynika że:
Jeżeli znane są np. wartości:
x
1
, x
2
, y
1
, y
2
i x
to z powyższego równania można
obliczyć wartość
y.
Na kolejnym rysunku pokazano, jak metodą interpolacji liniowej wyzna-
czyć można wartość wielkości y odpowiadającą wielkości x (lub na odwrót).
Nazwa interpolacja liniowa oznacza, że zakładamy, że rozpatrywane wiel-
kości łączy
zależność liniowa.
Interpolacja liniowa
Często istnieje też konieczność wyznaczenia wartości
y dla x leżącego poza zakre-
sem wykonanych pomiarów
.
Szacowanie wartości tej wielkości obarczone jest
większym ryzykiem
niż w przypa-
dku interpolacji, gdyż nie można być pewnym, jak będzie zmieniać się dana wiel-
kość poza zakresem wykonanych pomiarów.
W przypadku, jeśli punkty pomiarowe układają się wzdłuż linii prostej, w niewiel-
kiej odległości od przedziału, w którym wykonano pomiary, linię można
„przedłu-
żyć”
i odczytać odpowiednie współrzędne.
Procedurę taką nazywa się ekstrapola-
cją liniową.
punkty
pomiarowe
najlepiej dopasowana linia w
przedziale,
w którym wykonano pomiary
przedział wielkości x,
w którym wykonano pomiary
liniowa ekstrapolacja
poza zakres wykonanych
pomiarów
liniowa ekstrapolacja
poza zakres wykonanych
pomiarów
23
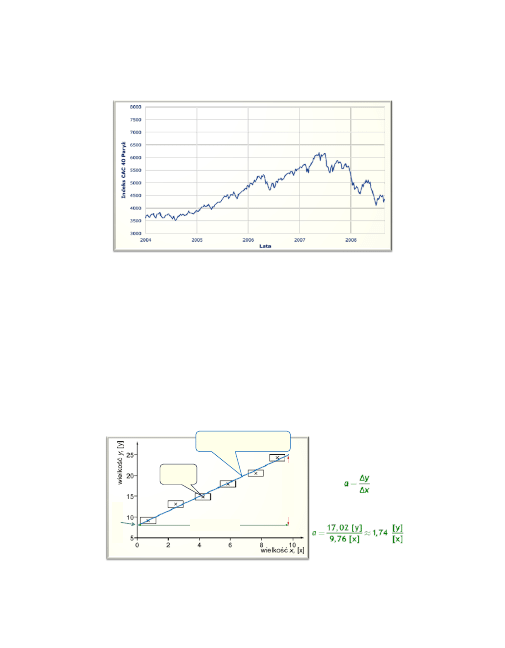
Łatwo pokazać, że interpolacja nieliniowa nie jest tak prosta, jak liniowa.
Rozpatrzmy przykład zmian wartości indeksu giełdowego w funkcji czasu
notowań.
0d 2004 r. do końca I kwartału 2006 r. indeks zmieniał się tak …
A jak pójdzie dalej? Jak będzie wyglądać nasza ekstrapolacja?
A jak dalej? W takiej sytuacji ekstrapolacja już nie jest łatwa?
Próbujemy dalej?
Często wykonuje się badania zależności, które w myśl przesłanek teoretycznych są
zależnościami liniowymi:
y =
a
·
x + b
Współczynnik kierunkowy
a
oraz parametr
b
posiadają określony sens fizyczny, za-
wierają informacje o badanym zjawisku. Zachodzi często konieczność wyznacze-
nia ich wartości.
W oparciu o wyżej przedstawione „przepisy” wykreślamy najpierw przebieg linii
najlepszego dopasowania.
Następnie wyznaczamy b.
punkty
pomiarowe
najlepiej dopasowana linia
y = a·x + b
b
=
7,
94
[
y]
Następnie wyznaczamy
a:
x = 9,76 [x]
y
=
17
,0
2
[y
]
Obliczamy wartość
a:
24
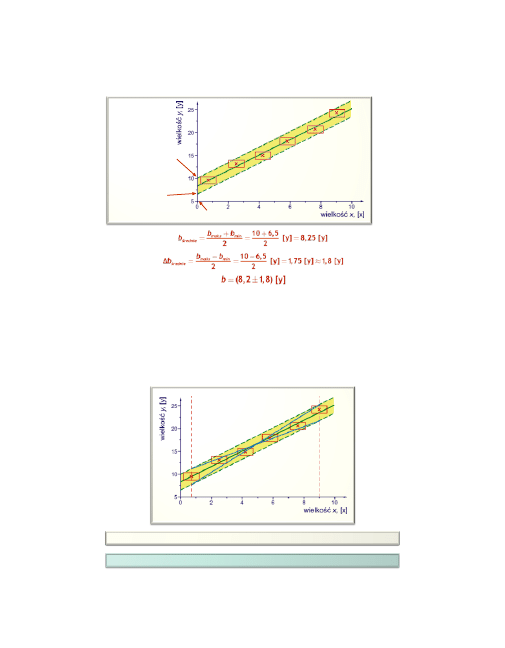
Sposób oszacowania wartości błędu
Δb
współczynnika
b
wyjaśnia rysunek.
b
maks
=
10 [y]
b
min
=
6,5 [y]
I
dalej:
x = 0 [x]
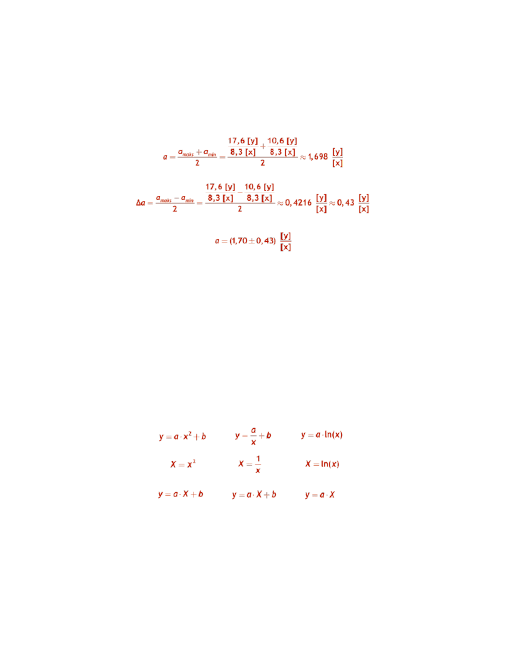
Sposób oszacowania wartości błędu współczynnika kierunkowego
Δa
przedstawia kolejny rysunek.
Zaznaczamy przedział, w którym wykonano pomiary...
Zaznaczamy linię o maksymalnym współczynniku kierunkowym a
maks
.
Zaznaczamy linię o minimalnym współczynniku kierunkowym a
min
.
Obliczamy wartości a
min
i a
maks
.
25
Po zaznaczeniu krzywych ufności, wyznacza się przebieg dwóch linii o ma-
ksymalnej,
a
maks
i minimalnej,
a
min
wartości współczynnika kierunkowego.
Wartość średnią współczynnika kierunkowego obliczamy ze wzoru:
Błąd
Δa
wartości współczynnika kierunkowego wyraża wzór:
Wreszcie końcowa wartość współczynnika kierunkowego wynosi:
Wreszcie zdarza się konieczność badania
zależności nieliniowych.
W niektórych przypadkach funkcji typu:
wystarczy wprowadzić nowe zmienne, odpowiednio:
i nowe funkcje mają postać liniową, odpowiednio:
Następnie, postępując zgodnie z omówionymi wyżej zasadami dotyczący-
mi wykresów liniowych, można dokonać ich analizy.
26
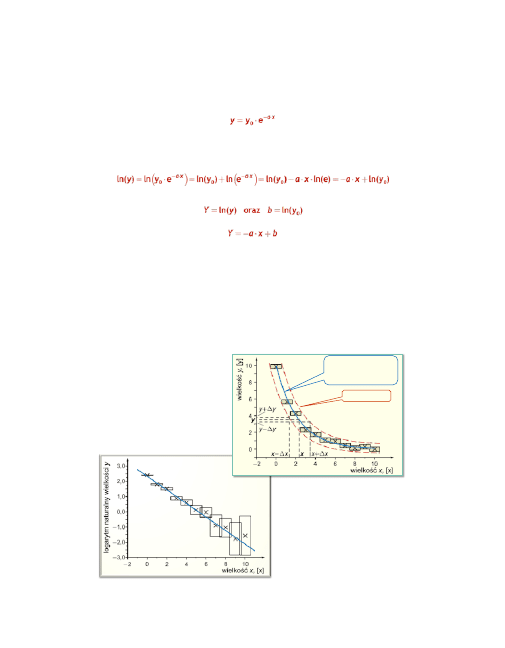
Ważny przypadek to często stosowana funkcja wykładnicza:
gdzie:
e
oznacza podstawę logarytmu naturalnego (e≈2,72),
y
0
oraz
a
to pewne parametry tej funkcji.
„Wyprostowanie” tej zależności uzyskuje się po obustronnym zlogarytmo-
waniu powyższego równania:
Po wprowadzenie następujących podstawień:
Otrzymujemy zależność:
Otrzymana liniowa zależność stanowi podstawę do dalszej analizy tego wy-
kresu wcześniej opisanymi metodami.
Kolejna rycina ilustruje rezultaty takiego przekształcenia.
Wykres zależności wykładniczej.
Zaznaczono sposób określenia krzy-
wych ufności, sposób odczytu nie-
znanych wartości x, gdy dane są
wartości y i sposób szacowania war-
tości błędów tak odczytanych wiel-
kości.
Ten sam wykres po wykorzystaniu,
opisanego wyżej, podstawienia przyj-
muje postać liniową.
Otrzymana liniowa zależność stano-
wi podstawę do dalszej analizy te-
go wykresu wcześniej opisanymi
metodami.
najlepiej dopasowana,
metodą najmniejszych
odchyleń, funkcja f(x)
krzywa ufności
27
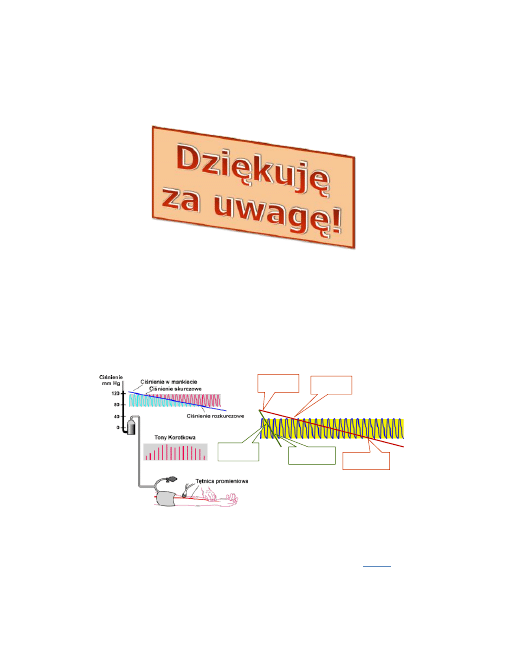
Pomiar ciśnienia skurczowego i rozkurczowego krwi metodą sfigmomano-
metryczną (konstruktor Riva Roci). W metodzie tej trzeba bardzo wolno
zmniejszać ciśnienie w mankiecie, w przeciwnym przypadku otrzymujemy
wyniki, które obarczone są błędem metody pomiaru.
ciśnienie w
mankiecie
ciśnienie
skurczowe
ciśnienie
rozkurczowe
ciśnienie
skurczowe
ciśnienie
rozkurczowe
Wyszukiwarka
Podobne podstrony:
download Zarządzanie Produkcja Archiwum w 09 pomiar pracy [ www potrzebujegotowki pl ]
cwiczenia6 www
Karta pomiarowa ćwiczenia
Pomiary cwiczenie nr 2
Opracowanie Pytań z prezentacji na ćwiczeniach kolos
Prezentacja do cwiczenia 6 mssql
Prezentacja do cwiczenia 10 mssql
cwiczenia8 www
cwiczenia6 www
Przygotowanie prezentacji-plan cwiczen, Wiertnik, Technologie informacyjne, IT - Prezentacja
Prezentacja do cwiczenia 5 mssql
Prezentacja do cwiczenia 7 mssql
BABICKI- referat, studia pedagogiczne, Rok 4, Teoretyczne podstawy pracy op-wych, Prezentacja na ćwi
Ćwiczenia-www, Moduł VII
protokol pomiarowy cwiczenia 5
METODY PREZENTACJI I OCENY BADANIA-[ www.potrzebujegotowki.pl ], Badania marketingowe
Prezentacja do cwiczenia 4 mssql
Prezentacja do cwiczenia 8 mssql
Prezentacja do cwiczenia 3 mssql
więcej podobnych podstron