G
P
S
G
P
S
W s z e c h o b e c n y

W
ciàgu najbli˝szych 10 lat nastà-
pi ogromny wzrost mo˝liwoÊci
Globalnego Systemu Lokaliza-
cji (GPS – Global Positioning
System). Nie tylko wzroÊnie do-
k∏adnoÊç pomiaru pozycji – zejdzie poni˝ej
jednego metra – ale tak˝e du˝o wi´ksza ni˝
dziÊ b´dzie jego niezawodnoÊç. Te wi´ksze
mo˝liwoÊci stanà si´ faktem dzi´ki serii udo-
skonaleƒ, takich jak zwi´kszenie liczby sy-
gna∏ów satelitarnych, wzrost mocy nadaw-
czej, korekcja b∏´dów i zagwarantowanie
przedzia∏ów precyzji, zastosowanie inteli-
gentnych anten dokonujàcych wyboru od-
bieranych sygna∏ów, a tak˝e integracja z sie-
ciami telewizyjnymi i telefonii komórkowej.
Pojawienie si´ GPS nowej generacji prze-
trze drog´ dla wielu nowych zastosowaƒ. Od-
czytywanie dok∏adnej pozycji (wspó∏rz´dnych
geograficznych i wysokoÊci nad poziomem
morza) stanie si´ mo˝liwe nie tylko na szla-
kach turystycznych i drogach wodnych, ale
tak˝e w centrach miast, wewnàtrz budynków
i innych miejscach, w których dotàd sygna∏
by∏ s∏aby, takich jak wysokie lasy. Z nowych
mo˝liwoÊci skorzystajà liczne firmy dzia∏ajà-
ce w takich dziedzinach, jak transport làdowy,
morski i powietrzny, energetyka, telekomu-
nikacja, budownictwo, górnictwo, geodezja i
rolnictwo. Skorzystajà równie˝ geografowie
i geolodzy. Najwi´cej zapewne zyska wojsko,
zgodnie z pierwotnym zamys∏em twórców
GPS. Wi´ksza niezawodnoÊç nowego syste-
mu powinna pozwoliç na przyk∏ad na utrzy-
mywanie samolotów na kursie wyznaczonym
przez kontrol´ lotów a˝ do chwili dotkni´cia
ko∏ami pasa startowego – albo sprowadzenie
w ciemnoÊciach wojskowego samolotu na po-
k∏ad lotniskowca. W nadchodzàcych latach
prawdopodobnie zagwarantuje on nawet bez-
pieczeƒstwo pasa˝erom jadàcym po automa-
tycznych autostradach.
Nowe konstelacje
GLOBALNY SYSTEM LOKALIZACJI
powsta∏ w roku
1978, gdy amerykaƒski Departament Obro-
ny wystrzeli∏ pierwszego satelit´ Navstar.
Choç twórcy systemu spodziewali si´, ˝e GPS
znajdzie cywilne i przemys∏owe zastosowa-
nia, ich g∏ównym celem by∏o dostarczenie
40 tys. wojskowych u˝ytkowników narz´dzia
do precyzyjnej nawigacji na làdzie, morzu i
w powietrzu. Cywile zacz´li korzystaç z GPS
w latach osiemdziesiàtych. Garstka geode-
tów i geofizyków u˝y∏a sygna∏ów z kilku wy-
strzelonych ju˝ satelitów do kartowania te-
renu. Gdy w latach dziewi´çdziesiàtych
gwiazdozbiór GPS rozrós∏ si´ do 24 sateli-
tów – minimalnej liczby niezb´dnej do uzy-
skania sta∏ej dost´pnoÊci – rynek cywilnych
zastosowaƒ prze˝y∏ istny boom.
DziÊ oko∏o 30 mln ludzi regularnie okreÊla
swojà pozycj´ w terenie za pomocà GPS.
Odbiorniki GPS pomagajà znajdowaç dro-
g´ samochodom, statkom i kutrom, a firmom
wynajmujàcym pojazdy Êledziç swà w∏a-
CZERWIEC 2004 ÂWIAT NAUKI
67
Globalnym Systemem Lokalizacji pos∏ugujà si´ dziÊ
zwykli turyÊci i làdujàcy we mgle piloci.
Korzysta z niego ju˝ 30 mln ludzi.
A w przysz∏oÊci b´dzie ich znacznie wi´cej
Per Enge
SYSTEM GPS dzi´ki kolejnym ulepszeniom
stanie si´ w koƒcu wystarczajàco niezawodny,
by powierzyç mu automatyczne sterowanie
samolotami i samochodami.
snoÊç. Przydajà si´ tak˝e do celów re-
kreacyjnych [patrz: Mark Clemens
„Przyszed∏em, zobaczy∏em, otworzy-
∏em”,
TECHNIKA I MY
; Âwiat Nauki,
kwiecieƒ 2004]. Miesi´cznie trafia na
rynek 200 tys. cywilnych odbiorników.
W roku 2003 wartoÊç sprzeda˝y urzà-
dzeƒ GPS si´gn´∏a blisko 3.5 mld do-
larów, a z badania rynku przeprowa-
dzonego ostatnio przez firm´ Frost &
Sullivan wynika, ˝e do roku 2010 rocz-
na wartoÊç sprzeda˝y mo˝e wzrosnàç
do 10 mld. Szacunki te nie uwzgl´dnia-
jà zysków firm zajmujàcych si´ budowà,
wystrzeliwaniem i obs∏ugà satelitów ani
zysków przedsi´biorstw wykorzystujà-
cych system GPS, takich jak firmy logi-
styczne i transportowe. Prywatni na-
bywcy stanowià nieco ponad po∏ow´
rynku, sektor komercyjny to 40%, a resz-
t´ – oko∏o 8% – kupuje wojsko.
Amerykaƒskie satelity GPS Navstar nie
sà jedynym orbitalnym systemem lokali-
zacji. Obok nich krà˝à na orbicie rosyjskie
satelity GLONASS, pe∏niàce podobnà
funkcj´, a za kilka lat do∏àczà do nich eu-
ropejskie satelity Galileo. Rosjanie opra-
cowali system GLONASS w czasach zim-
nej wojny jako odpowiedê na system
amerykaƒski. Ostatnio jednak GLONASS
przesta∏ byç u˝ywany, poniewa˝ operato-
ra systemu nie staç na uzupe∏nianie sa-
telitów. System Unii Europejskiej ma
zaczàç dzia∏aç pod koniec tego dziesi´-
ciolecia. Inwestorzy liczà na prognozo-
wany gwa∏towny rozwój rynku, zwiàza-
ny z upowszechnieniem si´ urzàdzeƒ GPS
w samochodach i telefonach komór-
kowych. Zarówno Unia Europejska, jak
i Rosja uwa˝ajà, ˝e w∏asny system lokali-
zacji jest im niezb´dny do zdobycia zna-
czàcej cz´Êci tego nowego rynku. Ostatnio
przedsi´biorstwa zarzàdzajàce systemami
GPS i Galileo zawar∏y wiele umów doty-
czàcych wspó∏pracy obu sieci.
OkreÊlajàc swoje po∏o˝enie na po-
wierzchni Ziemi, odbiornik GPS doko-
nuje tzw. trilateracji (to coÊ podobnego
do triangulacji, ale polega na pomiarze
boków, a nie kàtów). Precyzyjnie mie-
rzy odleg∏oÊç dzielàcà go od co najmniej
czterech satelitów systemu GPS na pod-
stawie sygna∏ów nadawanych z orbity
[ilustracja na nast´pnej stronie]. Kodo-
wane w okreÊlony sposób sygna∏y ra-
diowe pe∏nià funkcj´ jakby niewidzial-
nych linijek mierzàcych dystans mi´dzy
satelitami a odbiornikiem.
Dok∏adnoÊç przeci´tnego turystycz-
nego odbiornika pozwala okreÊliç po-
zycj´ z b∏´dem od 5 do 10 m. Dro˝sze
odbiorniki wojskowe osiàgajà precyzj´
poni˝ej 5 m. Odbiorniki korygujàce od-
czyt za pomocà dodatkowego sygna∏u
ze znajdujàcego si´ w pobli˝u odbiorni-
ka stacjonarnego umo˝liwiajà zmniej-
szenie b∏´du pomiaru do oko∏o pó∏ me-
tra. Ta technika nosi nazw´ pomiaru
ró˝nicowego.
Strumieƒ danych z kosmosu
ABY ZROZUMIE
å,
dokàd zmierza GPS,
warto najpierw poznaç jego obecne
mo˝liwoÊci. Upraszczajàc, mo˝na po-
wiedzieç, ˝e satelity GPS „zraszajà”
ca∏à Ziemi´ delikatnym deszczem fal
radiowych. Ka˝dy z tych satelitów wy-
sy∏a sygna∏ o mocy 500 W. Po przebyciu
20 000 km z orbity na Ziemi´, sygna∏
ten ma g´stoÊç strumienia równà za-
ledwie 10
–13
W/m
2
. Dla porównania –
g´stoÊç strumienia sygna∏u telewizyj-
nego odbieranego przez telewizor jest
miliard razy wi´ksza.
Satelity GPS przesy∏ajà w swoim sy-
gnale dwie zakodowane informacje.
Pierwsza z nich to tzw. depesza nawi-
gacyjna, czyli dane okreÊlajàce aktualne
po∏o˝enie satelity i czas wyemitowania
sygna∏u. Te czasowe i przestrzenne ko-
ordynaty sà obliczane przez oÊrodek na-
ziemny na podstawie odczytów z sieci
odbiorników GPS umieszczonych w
punktach o znanych wspó∏rz´dnych. Ob-
liczone wartoÊci sà nast´pnie wysy∏ane
do satelity, który do∏àcza je do w∏asne-
go sygna∏u, przeznaczonego dla wszyst-
kich u˝ytkowników.
Drugà informacjà wysy∏anà przez sa-
telity GPS sà tzw. kody taktujàce – uni-
katowe sekwencje cyfrowych impulsów.
Nie sà to dane w pe∏nym znaczeniu te-
go s∏owa, lecz „pseudolosowy szum”
(PRN – pseudo-random noise). Kody
taktujàce majà tylko pomóc odbiorni-
kowi zmierzyç czas przelotu sygna∏u od
satelity, co ma podstawowe znaczenie
dla dok∏adnoÊci pomiaru pozycji. Aby
podkreÊliç fakt, ˝e kody te nie sà de fac-
to strumieniami danych, w j´zyku tech-
nicznym mówi si´, ˝e sà z∏o˝one z „chi-
pów”, a nie z bitów.
Ka˝da sekwencja kodu PRN jest jak
nuty melodii. Przyjmijmy, ˝e satelita i
odbiornik dok∏adnie w tym samym cza-
sie grajà dok∏adnie t´ samà melodi´.
U˝ytkownik s∏yszy jà z obu êróde∏, ale
melodia z satelity jest opóêniona o czas
potrzebny na dotarcie dêwi´ku z orbity
do powierzchni Ziemi. Mierzàc stope-
rem odst´p czasu mi´dzy pojawieniem
si´ w obu melodiach tej samej nuty, u˝yt-
kownik mo˝e okreÊliç czas w´drówki
fali dêwi´kowej z orbity na Ziemi´. Mno-
˝àc nast´pnie ten czas przez pr´dkoÊç
dêwi´ku, uzyska odleg∏oÊç do satelity.
Odbiornik GPS wykonuje podobne
obliczenia, analizujàc kod PRN odbie-
rany z satelity. Dopasowuje otrzymanà
sekwencj´ taktujàcà (nuty melodii) do
przechowywanej w swojej pami´ci kopii
unikatowego kodu PRN dla danego sa-
telity, a nast´pnie oblicza opóênienie, z
jakim sygna∏ radiowy z satelity do niego
dotar∏. Potem mno˝y to opóênienie przez
68
ÂWIAT NAUKI CZERWIEC 2004
TOM DRAPER DESIGN (
popr
zednie str
ony
); KEVIN MAR
TY
AP Photo/Imperial V
alley P
ress
(t∏o
);
od lewej do prawej
: CORBIS;
LEIF SK
OOGFORS
Corbis
; AL
AN SCHEIN
Corbis
; CORBIS; RUSSELL MUNSON
Corbis
; P
A
TRICK DURAND
Corbis Sygma
n
Ponad 30 mln ludzi regularnie korzysta z systemu nawigacji satelitarnej GPS.
Liczba ta wielokrotnie si´ zwi´kszy, gdy tylko odbiorniki zacznà byç masowo
umieszczane w samochodach i telefonach komórkowych.
n
Wprowadzenie nowych sygna∏ów dla odbiorców wojskowych i cywilnych zwi´kszy
precyzj´ pomiaru pozycji. Pierwszy z tych sygna∏ów pojawi si´ wraz z wystrzeleniem
nowych satelitów w 2005 roku, a kolejny stanie si´ dost´pny kilka lat póêniej.
n
Sieci stacji kontrolnych b´dà gwarantowaç jakoÊç odczytów GPS, przekazujàc
na bie˝àco dopuszczalny zakres b∏´du. Ró˝norakie dzia∏ania – administracyjne,
organizacyjne i techniczne – zwi´kszà odpornoÊç sygna∏ów GPS na zak∏ócenia radiowe.
Przeglàd /
Udoskonalony GPS
Odczytywanie dok∏adnej pozycji
stanie si´ mo˝liwe
w centrach miast, wewnàtrz budynków i w lasach.
JAK DZIA¸A GPS
CZERWIEC 2004 ÂWIAT NAUKI
69
ALFRED T
. KAMAJIAN
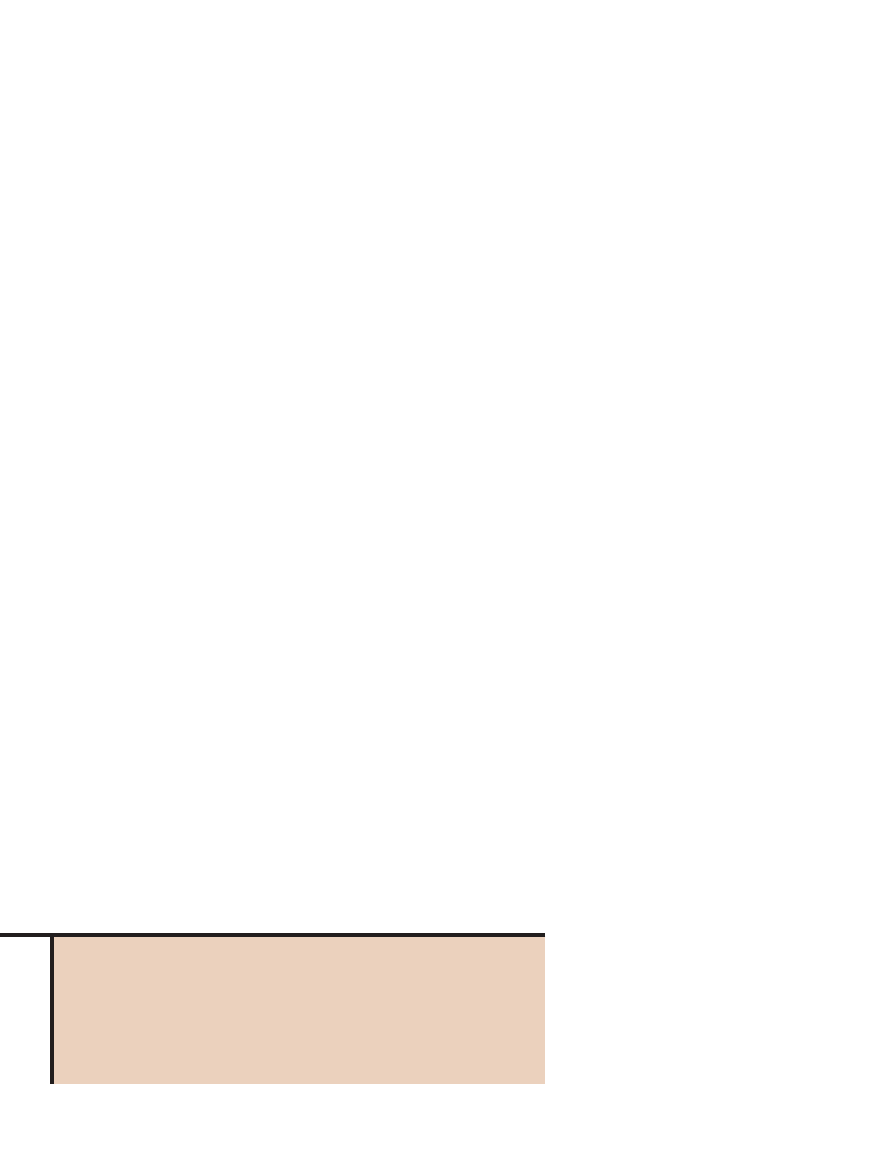
Globalny System Lokalizacji (GPS) to dost´pny na ca∏ym Êwiecie, oparty na sygna∏ach radiowych system sk∏adajàcy si´ z 24 satelitów
i wspó∏pracujàcych z nimi stacji naziemnych. Stosujàc analogicznà do triangulacji metod´ trilateracji, GPS oblicza wspó∏rz´dne geo-
graficzne miejsca na Ziemi przez pomiar odleg∏oÊci do co najmniej czterech satelitów. Dok∏adnoÊç pomiaru zale˝y od wielu czynników.
PRZECINAJÑCE SI¢ SFERY
Przyjmijmy, ˝e odbiornik GPS wylicza odleg∏oÊç do satelity
na 22 000 km. Odbiornik musi si´ zatem znajdowaç
na powierzchni sfery o promieniu 22 000 km, której Êrodkiem
jest satelita. Za∏ó˝my, ˝e nasz odbiornik okreÊli∏ równie˝
odleg∏oÊci do dwóch innych satelitów odpowiednio na 23 000
i 24 000 km. Pozycja odbiornika musi wi´c znajdowaç si´
na przeci´ciu trzech sfer. Z zasad geometrii wynika, ˝e trzy sfery
mogà mieç nie wi´cej ni˝ dwa punkty wspólne. Tylko jeden
z tych punktów b´dzie na tyle blisko powierzchni Ziemi,
by móg∏ byç pozycjà odbiornika.
SYGNA¸Y TAKTUJÑCE
OkreÊlenie odleg∏oÊci do satelity wymaga zmierzenia czasu,
jakiego potrzebuje sygna∏ na dotarcie do odbiornika. Czas ten,
pomno˝ony przez pr´dkoÊç, daje dystans pokonany przez fal´.
Pr´dkoÊç jest znana, bo fale radiowe przemieszczajà si´
z pr´dkoÊcià Êwiat∏a, równà oko∏o 300 000 km/s.
Problemem jest mierzenie czasu. U∏atwia je pseudolosowy
kod taktujàcy (PRN) – skomplikowany cyfrowy strumieƒ danych.
Kod ka˝dego satelity jest niepowtarzalny, dzi´ki czemu
odbiornik nie myli sygna∏ów.
PRZESUWANIE KODU
Muzyczna analogia pomaga zrozumieç, w jaki sposób kody
PRN u∏atwiajà obliczanie odleg∏oÊci. PrzypuÊçmy, ˝e satelita
i odbiornik równoczeÊnie zaczynajà odtwarzaç t´ samà
melodi´ – kod PRN. Melodia p∏ynàca z kosmosu b´dzie nieco
opóêniona w stosunku do melodii z odbiornika. Mierzàc czas,
jaki dzieli pojawienie si´ tej samej nuty (czyli sekwencji
kodu PRN) w melodiach z odbiornika i satelity, mo˝na
okreÊliç czas „przelotu” sygna∏u. Gdy pomno˝y si´ ten czas
przez pr´dkoÊç Êwiat∏a, uzyskuje si´ odleg∏oÊç do satelity.
SYNCHRONIZACJA ZEGARÓW
Na pok∏adzie satelitów GPS czas mierzà, niemal idealnie,
zegary atomowe, jednak˝e odbiorniki GPS muszà sobie radziç
z tanimi, du˝o mniej dok∏adnymi zegarami kwarcowymi.
Wynikajàce z tego b∏´dy w pomiarze czasu sprawiajà,
˝e trzy wspomniane sfery nie przecinajà si´ dok∏adnie w pozycji
odbiornika (czarne przerywane linie). Aby zsynchronizowaç
zegar w odbiorniku z zegarami satelitów i w ten sposób
skompensowaç powsta∏y b∏àd, odbiornik musi wykonaç pomiar
odleg∏oÊci do czwartego satelity. Ten odczyt daje poprawk´,
która sprowadza punkt przeci´cia trzech sfer do prawdziwej
pozycji odbiornika (czerwone linie).
Sfera wyznaczona przez pomiar odleg∏oÊci
Odrzucona pozycja
Satelita GPS
23 000 km
22 000 km
24 000 km
Satelita GPS
Ziemia
Ziemia
Ziemia
Prawdziwa pozycja
odbiornika
Sfera
wyznaczona
przez pomiar
odleg∏oÊci
Kod PRN
(pomiar odleg∏oÊci)
Satelita
korygujàcy
KOD PRN NADAWANY PRZEZ SATELIT¢
KOD PRN ZAPISANY W ODBIORNIKU
Przesuni´cie sekwencji kodu
Opóênienie
Skorygowana
pozycja
Pomiary
wyjÊciowe
Satelita
GPS
Pomiar
korygujàcy
pr´dkoÊç Êwiat∏a, uzyskujàc odleg∏oÊç
do satelity.
Odbiorniki mierzà wi´c odleg∏oÊç za
pomocà wirtualnych linijek wysuwa-
nych w stron´ Ziemi przez wszystkie sa-
telity. Kody taktujàce pe∏nià funkcj´ po-
dzia∏ki na radiowej linijce, depesza
nawigacyjna podaje zaÊ po∏o˝enie sate-
lity, czyli okreÊla miejsce, w którym za-
czyna si´ podzia∏ka linijki. Gdyby od-
biorniki GPS mia∏y idealnie dok∏adne
zegary, do jednoznacznego okreÊlenia
trzech wspó∏rz´dnych pozycji – szero-
koÊci i d∏ugoÊci geograficznej oraz wy-
sokoÊci – wystarczy∏yby trzy pomiary
odleg∏oÊci. Jeden pomiar lokalizowa∏by
u˝ytkownika na powierzchni sfery o
okreÊlonym promieniu, której Êrodkiem
jest satelita. Dwa pomiary umieÊci∏yby
go na przeci´ciu dwóch takich sfer, trzy
zaÊ – w konkretnym punkcie, wspólnym
dla trzech sfer. Odbiornik rozwiàza∏by
po prostu trzy równania z trzema nie-
wiadomymi: szerokoÊcià geograficznà,
d∏ugoÊcià geograficznà i wysokoÊcià.
Jednak idealne zegary nie istniejà. Od-
biorniki GPS muszà wi´c obliczyç jesz-
cze czwartà niewiadomà: rozbie˝noÊç
mi´dzy czasem mierzonym przez tani
zegar w odbiorniku a czasem sieci GPS.
Czas GPS jest mierzony z dok∏adnoÊcià
do miliardowych cz´Êci sekundy przez
zegary atomowe, tymczasem zegar w
odbiorniku mo˝e generowaç b∏àd po-
nad jednej sekundy na dob´. B∏àd cza-
su mo˝na zamieniç na b∏àd odleg∏oÊci,
mno˝àc go przez pr´dkoÊç Êwiat∏a
(300 000 km/s). Dodaje si´ go do odle-
g∏oÊci zmierzonej od ka˝dego satelity,
co t∏umaczy, dlaczego wynik tych po-
miarów nazywa si´ pseudoodleg∏oÊcià.
Na szcz´Êcie b∏àd jest identyczny dla
wszystkich satelitów, tak wi´c odczyt sy-
gna∏u z czwartego satelity pozwala uzy-
skaç cztery równania z czterema nie-
wiadomymi: szerokoÊcià geograficznà,
d∏ugoÊcià geograficznà, wysokoÊcià i
czasem.
Poniewa˝ u˝ytkownikom urzàdzeƒ
GPS zdarza si´ szybko zmieniaç pozycj´,
nowoczesne odbiorniki mierzà tak˝e
wielkoÊç efektu Dopplera, czyli wywo∏a-
nà przez ruch pozornà zmian´ cz´sto-
tliwoÊci sygna∏u. JeÊli u˝ytkownik od-
dala si´ od satelity, cz´stotliwoÊç fali si´
zmniejsza, jeÊli zaÊ si´ zbli˝a, zwi´ksza
si´. To tak jak wtedy, gdy mija nas po-
ciàg. Gdy nadje˝d˝a, s∏yszany gwizd ma
wy˝szy ton ni˝ wówczas, gdy pociàg si´
oddala. Âledzenie zmian cz´stotliwoÊci
pozwala odbiornikowi w bezpoÊredni
sposób i du˝o dok∏adniej oceniç pr´d-
koÊç, z jakà porusza si´ u˝ytkownik.
Warto zauwa˝yç, ˝e odbiorniki GPS
wykonujà skomplikowane zadanie okre-
Êlenia w∏asnej pozycji bez wysy∏ania ja-
kichkolwiek sygna∏ów. Mimo to odbior-
niki instalowane w przysz∏oÊci w
telefonach komórkowych b´dà doÊç ta-
nie – cena jednego egzemplarza nie
przekroczy pi´ciu dolarów.
Przebiç jonosfer´
NADAJNIKI SATELITÓW
systemu GPS prze-
sy∏ajà swoje sygna∏y w standardowym
paÊmie fal radiowych (RF). Fala noÊna
sygna∏u ma klasyczny kszta∏t sinusoidy
– jej cz´stotliwoÊç wyra˝a liczb´ cykli
zmian amplitudy w ciàgu sekundy. Obec-
ny system GPS wykorzystuje dwa pa-
sma – L1 i L2 – le˝àce w zakresie mi-
krofal, czyli bardzo krótkich fal
radiowych. L1 nazywane jest zwykle cy-
wilnym, mimo ˝e wykorzystuje je rów-
nie˝ wojsko. Jest ono powszechnie do-
st´pne i znajduje zastosowanie w
wi´kszoÊci dzisiejszych cywilnych urzà-
dzeƒ. L2 s∏u˝y przede wszystkim woj-
sku. Inni u˝ytkownicy mogà korzystaç
z pasma L2, ale bez wojskowych kodów
PRN, co sprawia, ˝e jest to niezbyt prak-
tyczne. Na przyk∏ad cywilne odbiorni-
70
ÂWIAT NAUKI CZERWIEC 2004
ALFRED T
. KAMAJIAN
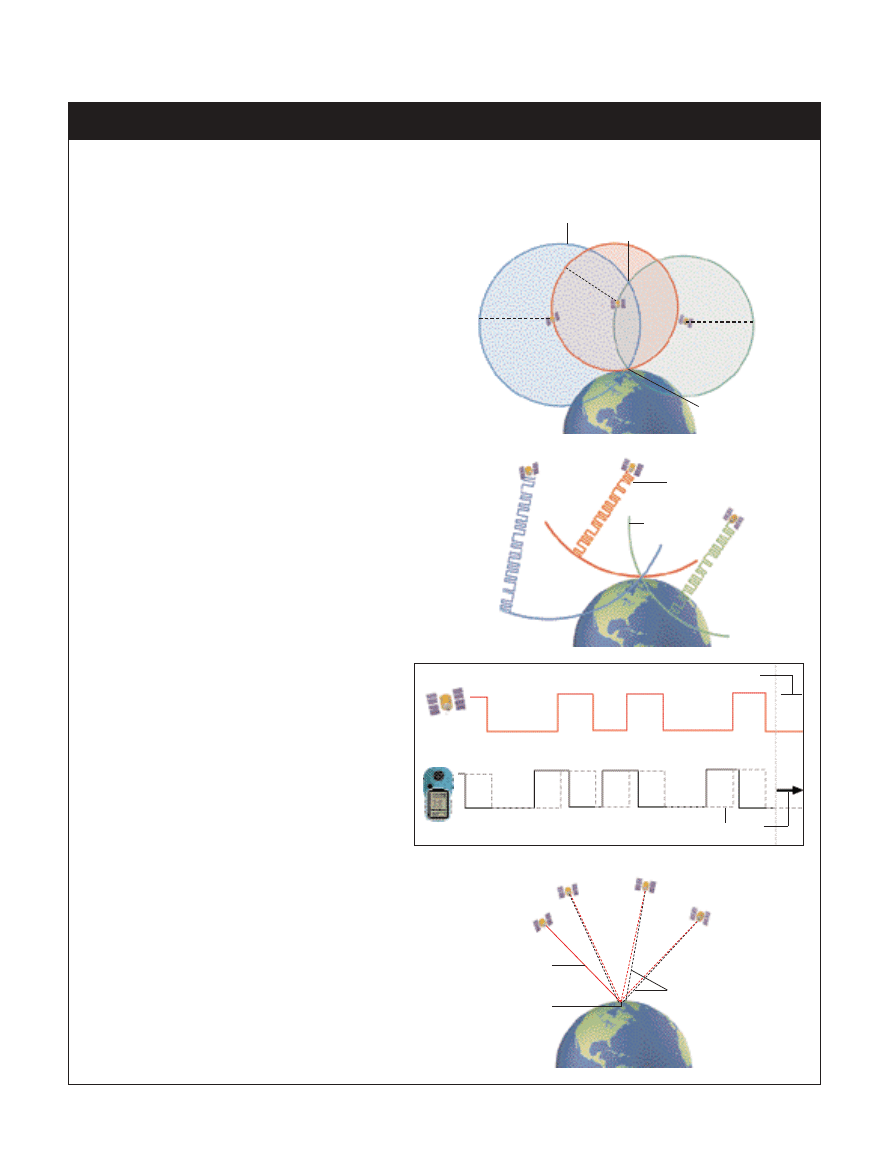
WI¢CEJ SYGNA¸ÓW
OkreÊlenie dok∏adnych wspó∏rz´dnych wymaga precyzyjnych pomiarów odleg∏oÊci do
satelitów systemu GPS, których dokonuje si´ poÊrednio przez pomiar czasu, w jakim
sygna∏ dociera z satelity do odbiornika [ramka na poprzedniej stronie]. Jednak˝e na-
∏adowane czàstki w szybko zmieniajàcej si´ jonosferze spowalniajà sygna∏, powodu-
jàc pojawienie si´ b∏´du w pomiarze czasu. Udoskonalony system GPS b´dzie kom-
pensowa∏ wp∏yw jonosfery i zak∏óceƒ spowodowanych przez inne sygna∏y radiowe.
JUTRO:
Satelity GPS b´dà nadawa∏y wiele ogólnodost´pnych
sygna∏ów na ró˝nych cz´stotliwoÊciach. Opóêniajàcy
wp∏yw jonosfery jest zale˝ny od cz´stotliwoÊci fali, tak
wi´c cywilne odbiorniki b´dà mog∏y obliczaç poprawk´
na podstawie porównania opóênieƒ co najmniej dwóch
sygna∏ów o ró˝nych cz´stotliwoÊciach fali noÊnej.
JUTRO:
W przypadku zak∏óceƒ
sygna∏u b´dzie mo˝na
prze∏àczyç si´ na inny,
co zwi´kszy niezawodnoÊç
systemu.
DZIÂ:
Pojedynczy sygna∏
cywilny
DZIÂ:
Silne sygna∏y z nadajników
naziemnych mogà ca∏kowicie
zag∏uszyç pasma radiowe
u˝ywane przez GPS.
Jonosfera
Nadajnik
Zak∏ócenia radiowe
Opóênienie sygna∏u
U˝ytkownicy GPS
ki majà problemy z wykorzystaniem L2
z satelitów znajdujàcych si´ nisko nad
horyzontem albo zas∏oni´tych nawet
przez niewielkà przeszkod´, takà jak
drzewo. Co wi´cej, odbiorniki wykorzy-
stujàce L2 sà drogie, bo u˝ywanie L2
bez znajomoÊci kodów PRN wymaga
skomplikowanej obróbki sygna∏u.
Z tych powodów wi´kszoÊç cywilnych
odbiorników GPS wykorzystuje wy∏àcz-
nie L1. Dzi´ki niemu zazwyczaj osiàga-
jà precyzj´ 5–10 m. G∏ównym powodem
tej stosunkowo ma∏ej dok∏adnoÊci sà na-
∏adowane czàstki w ziemskiej jonosfe-
rze, rozciàgajàcej si´ od oko∏o 70 km
nad powierzchnià Ziemi do wysokoÊci
1300 km, a nawet wy˝ej. Ta przewodzà-
ca pow∏oka spowalnia fale radiowe z sa-
telitów GPS na podobnej zasadzie, jak
woda w szklance deformuje obraz zanu-
rzonego w niej o∏ówka. Zale˝nie od wa-
runków jonosfera „rozciàga” fal´ sygna-
∏u o 1–10 m, a czasem nawet wi´cej.
Aby skompensowaç ten b∏àd, cz´Êç
u˝ytkowników stosuje ró˝nicowy po-
miar GPS (D-GPS – differential GPS).
Technika ta wymaga u˝ycia dwóch od-
biorników GPS – jednego ruchomego i
jednego stacjonarnego, umieszczonego
w punkcie o znanych wspó∏rz´dnych.
Odbiornik stacjonarny oblicza ró˝nic´
mi´dzy pozycjà okreÊlonà na podstawie
sygna∏u a bezwzgl´dnà odleg∏oÊcià do
satelity i nadaje obliczonà wartoÊç do
odbiornika ruchomego, który u˝ywa tej
poprawki do okreÊlenia w∏asnej pozy-
cji. Technika D-GPS daje najlepsze wy-
niki, gdy odbiornik ruchomy znajduje
si´ wzgl´dnie blisko stacjonarnego. Gdy
odleg∏oÊç mi´dzy nimi nie przekracza
100 km, b∏àd jonosferyczny zostaje
skompensowany niemal ca∏kowicie, po-
niewa˝ sygna∏ z satelity pokonuje te sa-
me atmosferyczne przeszkody w drodze
do obu odbiorników.
Mocniejsze sygna∏y
JU
˚ OD PRZYSZ¸EGO ROKU
satelity systemu
GPS zacznà nadawaç nowe sygna∏y, któ-
re poprawià dost´pnoÊç us∏ug lokaliza-
cyjnych i pomogà zwi´kszyç dok∏adnoÊç
pomiarów dzi´ki wyeliminowaniu b∏´-
dów generowanych przez jonosfer´ [ilu-
stracja na poprzedniej stronie]. Do pasm
L1 i L2 zostanà dodane dwa sygna∏y woj-
skowe, a do pasma L2 dodatkowy sygna∏
dla odbiorców cywilnych. Obecne sygna-
∏y b´dà nadal nadawane, aby w przysz∏o-
Êci mog∏y dzia∏aç dzisiejsze odbiorniki.
Oko∏o roku 2008 kolejna seria satelitów
GPS zacznie nadawaç wi´cej sygna∏ów
cywilnych w trzecim paÊmie o symbolu
L5. (W pasmach L3 i L4 nadawane sà sy-
gna∏y wojskowe nies∏u˝àce do lokaliza-
cji). Sygna∏ w paÊmie L5 b´dzie cztero-
krotnie mocniejszy od dzisiejszych.
Te dodatkowe sygna∏y pozwolà poje-
dynczemu odbiornikowi samodzielnie
obliczyç poprawk´ jonosferycznà i – co
za tym idzie – zmniejszyç b∏àd pomiaru,
wykorzystujàc na przyk∏ad fakt, ˝e L1
podczas w´drówki przez t´ nieprzewi-
dywalnà warstw´ atmosfery b´dzie
opóêniany inaczej ni˝ nowy sygna∏ L5.
W przysz∏oÊci odbiorniki b´dà wi´c mo-
g∏y po prostu porównaç opóênienia w
sygna∏ach L1 i L5, a nast´pnie wyko-
rzystywaç wynik tej kalkulacji do obli-
czenia g´stoÊci elektronowej jonosfe-
ry i skompensowania generowanego
przez nià b∏´du. W∏aÊnie t´ metod´
próbuje si´ stosowaç w dzisiejszych
drogich odbiornikach cywilnych, po-
równujàc ogólnodost´pny sygna∏ L1 z
wojskowym L2. Jednak dla nowych sy-
gna∏ów cywilnych b´dà znane kody
PRN, w zwiàzku z czym zniknà obec-
ne trudnoÊci z wykorzystaniem techni-
ki dwupasmowej. Wprowadzenie no-
wych sygna∏ów sprawi, ˝e dwu-, a
nawet trójpasmowe odbiorniki stanà si´
standardem na rynku u˝ytkowników
prywatnych i komercyjnych.
Równie˝ u˝ytkownicy techniki D-GPS
skorzystajà z nowych sygna∏ów. Jak ju˝
wspomnia∏em, dok∏adnoÊç pomiarów
tà technikà maleje wraz z oddalaniem
si´ od odbiornika stacjonarnego, ponie-
wa˝ wiàzka fal radiowych trafiajàca do
odbiornika ruchomego zaczyna prze-
chodziç przez jonosfer´ w zupe∏nie in-
nym miejscu ni˝ wiàzka odbierana przez
odbiornik stacjonarny. Gdy zostanà udo-
st´pnione dodatkowe cz´stotliwoÊci,
odbiornik ruchomy b´dzie w stanie sa-
modzielnie obliczyç poprawk´ jonosfe-
rycznà, a technika D-GPS pozwoli wy-
eliminowaç inne, mniejsze b∏´dy. W
przysz∏oÊci u˝ytkownicy D-GPS powin-
ni uzyskaç precyzj´ pomiaru 30–50 cm.
Najbardziej wymagajàcy u˝ytkownicy
dzisiejszego systemu GPS – tacy jak geo-
deci i naukowcy – potrzebujà centyme-
trowej, a nawet milimetrowej dok∏ad-
noÊci. Takà dok∏adnoÊç mo˝e daç tylko
wykraczajàca poza wykorzystanie ko-
dów PRN ulepszona technika D-GPS,
polegajàca na pomiarze czasu dotarcia
fali noÊnej przenoszàcej sygna∏y GPS z
orbity.
Fale radiowe przenoszàce sygna∏y GPS
to sinusoidalne mikrofale. D∏ugoÊç tej fa-
CZERWIEC 2004 ÂWIAT NAUKI
71
Walka z zak∏óceniami
Sygna∏ GPS jest bardzo s∏aby, a zatem aby system funkcjonowa∏ poprawnie, bardzo wa˝na
jest cisza radiowa. Nawet s∏abe nadajniki dzia∏ajàce w tym samym paÊmie mogà zak∏óciç
prac´ urzàdzeƒ GPS. Dlatego amerykaƒska Komisja ds. Telekomunikacji (US Federal Com-
munications Commission) wyda∏a zakaz nadawania w tym paÊmie, tak wi´c wszelkie za-
k∏ócenia w nim wyst´pujàce pochodzà ze êróde∏ naturalnych.
Mimo tego zakazu ci u˝ytkownicy GPS, dla których kluczowe jest bezpieczeƒstwo – tacy jak
kontrolerzy ruchu lotniczego – wcià˝ majà problemy ze sporadycznymi zanikami sygna∏u spo-
wodowanymi przez przypadkowe lub celowe zak∏ócanie pasma GPS. Na szcz´Êcie majà do
dyspozycji coraz wi´cej metod obrony przez zak∏óceniami. Na przyk∏ad za∏ogi samolotów mo-
gà korzystaç z dodatkowych systemów nawigacji, opartych na uk∏adach ˝yroskopowych – ta-
kich jak Loran-C – lub urzàdzeƒ do pomiaru odleg∏oÊci. Wojskowe odbiorniki GPS cz´sto u˝y-
wajà „inteligentnych” anten kierunkowych, które usuwajà zak∏ócajàcy sygna∏ (t∏umiàc fale
nap∏ywajàce z okreÊlonego kierunku) bez znaczàcej utraty jakoÊci sygna∏u GPS. Z kolei pre-
cyzja odbiorników cywilnych w niedalekiej przysz∏oÊci mo˝e si´ znacznie poprawiç dzi´ki po-
miarom odleg∏oÊci do nadajników telewizyjnych lub stacji bazowych telefonii komórkowej.
PER ENGE wyk∏ada lotnictwo i astronautyk´ w Stanford University, gdzie w School of Engineering
ma tytu∏ Kleiner-Perkins, Mayfield, Sequoia Capital Professor. Zasiada tak˝e w radzie wydzia-
∏u i jest kierownikiem GPS Research Laboratory, w którym pracuje nad urzàdzeniami oblicza-
jàcymi na bie˝àco dopuszczalny zakres b∏´du w systemie GPS oraz metodami zabezpieczenia
systemu przed zak∏óceniami radiowymi. Otrzyma∏ nagrody Keplera, Thurlowa i Burki fundowa-
ne przez Institute of Navigation (ION). Jest tak˝e wyk∏adowcà w Institute for Electrical and
Electronics Engineers (IEEE) oraz ION. Autor dzi´kuje za wsparcie Federal Aviation Administra-
tion, amerykaƒskiej marynarce wojennej i NASA, a tak˝e swoim wspó∏pracownikom ze Stan-
ford University oraz specjalistom od nawigacji, którzy pomogli mu w napisaniu tego artyku∏u.
O
AUTORZE
li – czyli odleg∏oÊç mi´dzy kolejnymi ma-
ksimami sinusoidy – wynosi 19 cm. Od-
biornik mierzy czas nadejÊcia maksimum
fali z mniej wi´cej jednoprocentowà
dok∏adnoÊcià, co przek∏ada si´ na dystans
1–2 mm. Jest to w∏aÊnie precyzja, jakiej
wymagajà zaawansowani u˝ytkownicy,
lecz pomiary fali noÊnej sà z natury nie-
jednoznaczne – odbiornik nie stwierdzi,
które maksimum mierzy. Dopóki nie
b´dzie mo˝na jednoznacznie okreÊliç,
który odcinek fali jest mierzony, b∏àd po-
miaru b´dzie wynosi∏ nieznanà liczb´ jej
okresów.
To problem podobny do mierzenia od-
leg∏oÊci za pomocà najmniejszej podzia∏-
ki na linijce. W przeciwieƒstwie do grub-
szej podzia∏ki jej kreseczki sà bardzo
blisko siebie i nie sà opisane – umo˝li-
wiajà wi´c precyzyjny, ale niejednoznacz-
ny odczyt. Na szcz´Êcie istnieje specjalna
metoda obliczeniowa, pozwalajàca jed-
noznacznie powiàzaç zgrubnà, 30-cen-
tymetrowà precyzj´ standardowej techni-
ki D-GPS z wysokà, dwumilimetrowà
rozdzielczoÊcià fali noÊnej. Ta metoda
tworzy podzia∏k´ o poÊredniej skali, do-
pasowanà do obu poziomów dok∏adnoÊci.
Obliczeniowy pomost ∏àczàcy oba te po-
ziomy budowany jest niezale˝nie.
Problem ten najlepiej daje si´ przed-
stawiç za pomocà analogii. Jak ju˝ wspo-
mnia∏em, kody PRN sà jak zapis nutowy
skomplikowanej melodii, której ka˝dà
nut´ mo˝na jednoznacznie zidentyfiko-
waç. Z kolei fala noÊna jest jak rytm wy-
bijany na b´bnie do tej melodii – tak szyb-
ki, ˝e na ka˝dà nut´ przypada wiele
uderzeƒ. S∏uchajàc wy∏àcznie b´bna,
trudno okreÊliç, który fragment melodii
jest w∏aÊnie grany. Rozwiàzanie sprowa-
dza si´ do tego, by wykorzystaç nuty do
identyfikacji dêwi´ków b´bna. W przy-
padku systemu GPS to nie∏atwe zadanie.
Czas rozpocz´cia ka˝dej nuty (czyli chi-
pu kodu PRN) mo˝e byç okreÊlony z do-
k∏adnoÊcià do zaledwie 30 cm. Tymcza-
sem uderzenia rytmu (okresy fali noÊnej)
– do 19 cm. Uderzenia sà zbyt cz´ste,
by mo˝na je by∏o rozró˝niç – jest to nie-
mo˝liwe przy 30-centymetrowej precy-
zji kodów PRN.
Aby zidentyfikowaç poszczególne ude-
rzenia b´bna, potrzebny jest dodatkowy
instrument perkusyjny, grajàcy nieco wol-
niej. Drogie odbiorniki GPS generujà ten
drugi rytm, mno˝àc fal´ noÊnà L1 przez
fal´ noÊnà L2 i uzyskujàc tzw. cz´stotli-
woÊç dudnieƒ. Równie˝ ta procedura ma
muzycznà analogi´. Gdy jakiÊ instrument
wydaje z siebie jednoczeÊnie dwa tony,
s∏uchacze oprócz nich s∏yszà równie˝
trzeci, którego êród∏em jest ró˝nica mi´-
dzy cz´stotliwoÊciami dwóch granych to-
nów – to w∏aÊnie cz´stotliwoÊç dudnieƒ.
Poniewa˝ nowy ton ma cz´stotliwoÊç
równà ró˝nicy cz´stotliwoÊci wyjÊcio-
wych, zawsze jest ona mniejsza od ich
obu. A mniejsza cz´stotliwoÊç to wi´k-
sza d∏ugoÊç fali. W przypadku GPS d∏u-
goÊç fali dudnieƒ wynosi 85 cm, a sys-
tem mierzy jà z dok∏adnoÊcià do 8 mm.
To wystarczajàco du˝a d∏ugoÊç, by jed-
noznacznie odnieÊç jà do 30-centymetro-
wej dok∏adnoÊci pomiaru kodu PRN.
Dzi´ki tej technice drogie odbiorniki GPS
mogà wi´c sprostaç wymaganiom za-
awansowanych u˝ytkowników systemu.
Nowe sygna∏y, które nied∏ugo zosta-
nà wprowadzone, jeszcze bardziej
wzmocnià obliczeniowy pomost pomi´-
dzy chipami kodów PRN a szybkim ryt-
mem fal noÊnych. Cywilne odbiorniki
zyskajà dost´p do publicznych kodów
w paÊmie L2, a tak˝e do zupe∏nie nowe-
go pasma L5. B´dà mia∏y do dyspozy-
cji trzy cz´stotliwoÊci dudnieƒ (L1 minus
L2, L1 minus L5 i L2 minus L5), co da
im wiele mo˝liwoÊci poprawiania precy-
zji kodów PRN za pomocà fal noÊnych
i osiàgania bardzo dok∏adnych odczy-
tów po∏o˝enia.
GPS dla samolotów
JU
˚ DZIÂ MO
˚NA
si´ przekonaç o dobro-
dziejstwach ulepszonego systemu GPS.
Federal Aviation Administration (FAA)
wdra˝a w∏aÊnie nowy system nawigacji
lotniczej, w którym niezawodnoÊç jest
bez wàtpienia kluczowa. Pozwoli on pi-
lotom ca∏kowicie zdaç si´ na system
GPS, który posadzi samolot na pasie na-
wet w warunkach zerowej widocznoÊci.
Do wykonania takiego zadania w spo-
sób niezawodny nie wystarczy jedynie
wysoka precyzja w okreÊlaniu pozycji.
Muszà byç jeszcze spe∏nione dwa wa-
runki. Po pierwsze, piloci muszà znaç
72
ÂWIAT NAUKI CZERWIEC 2004
ALFRED T
. KAMAJIAN
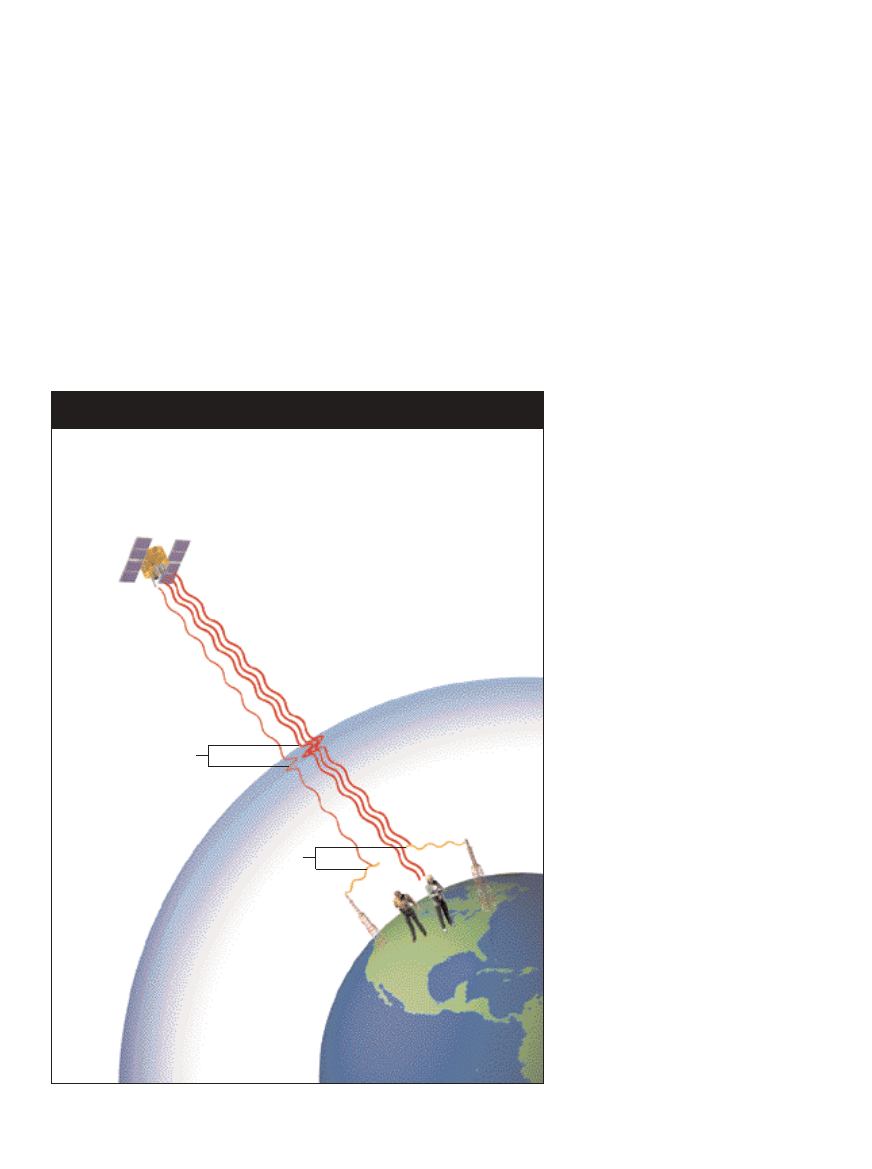
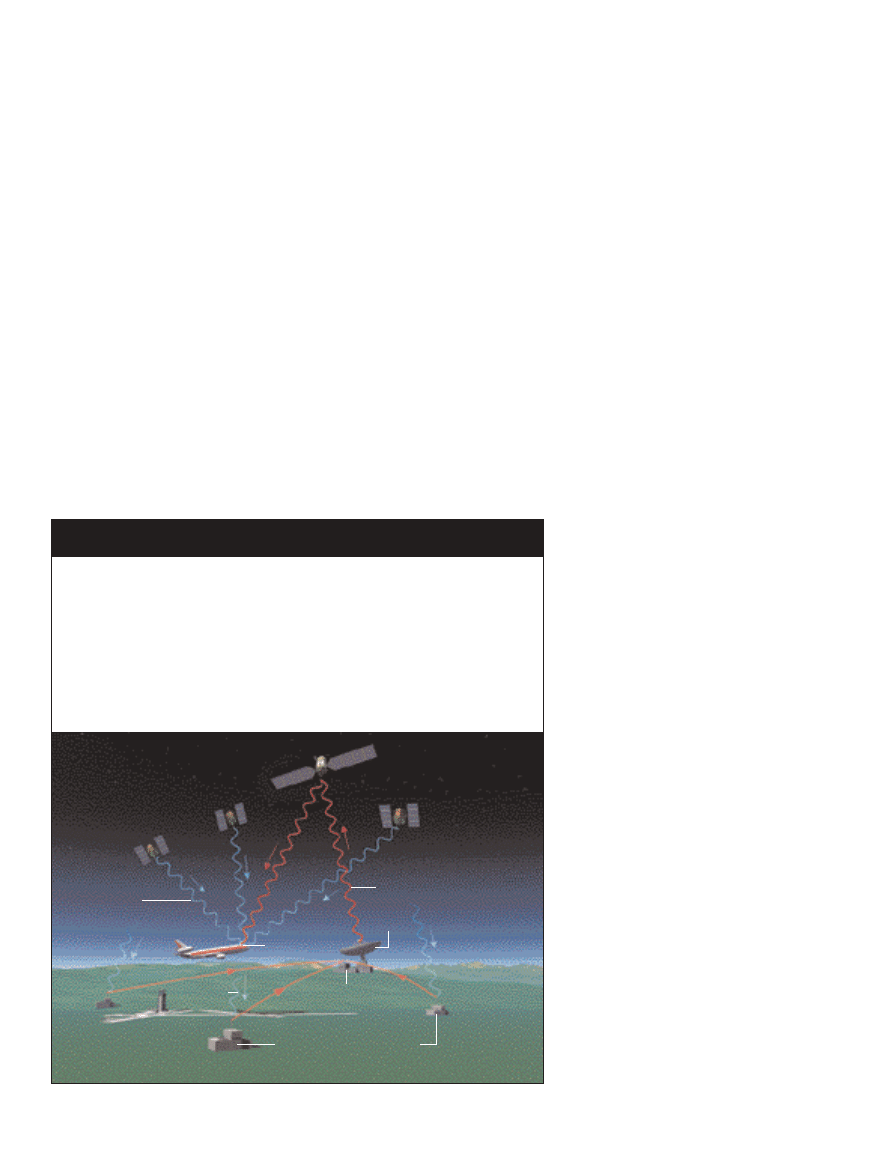
POPROWADZI WAS WAAS
Bezpieczeƒstwo lotu jest du˝o wi´ksze, gdy piloci dok∏adnie znajà po∏o˝enie maszyny. Sys-
tem WAAS (Wide-Area Augmentation System), opracowany przez Federal Aviation Admi-
nistration, poprawia dok∏adnoÊç i niezawodnoÊç sygna∏u GPS wykorzystywanego przez lot-
nictwo. Na terenie Stanów Zjednoczonych WAAS oferuje dok∏adnoÊç 1–2 m w poziomie
i 2–3 m w pionie. G∏ównà cz´Êcià systemu jest 25 stacji bazowych o znanych wspó∏rz´d-
nych (1). Ka˝da stacja porównuje swój odczyt pozycji w systemie GPS z faktycznymi wspó∏-
rz´dnymi i na tej podstawie oblicza poprawki dla wszystkich aktualnie namierzanych sate-
litów. Poprawki te trafiajà nast´pnie do dwóch stacji zbierania danych (2). Stamtàd, przez
satelity geostacjonarne (3), komplet poprawek przesy∏any jest do odbiorników WAAS (4),
które na bie˝àco wprowadzajà poprawki do odczytów GPS.
Sygna∏ GPS
Sygna∏ GPS
4
3
2
1
Odbiornik
WAAS
Satelita GPS
Satelita
geostacjonarny
Sygna∏ poprawki WAAS
Nadajnik
satelitarny
Stacje bazowe systemu WAAS
Stacja zbierania
danych
maksymalnà wielkoÊç b∏´du lokalizacji
w ka˝dej mo˝liwej sytuacji. Rozpoczy-
najàc na przyk∏ad manewr podejÊcia
do làdowania, pilot mo˝e tolerowaç b∏àd
nie wi´kszy ni˝ 10 m. Po drugie, u˝yt-
kownicy muszà mieç gwarancj´, ˝e ich
system nawigacji jest absolutnie beza-
waryjny.
FAA opracowa∏a dwa systemy oparte
na technice D-GPS, których zadaniem
jest okreÊlanie na bie˝àco dopuszczal-
nego zakresu b∏´du lokalizacji. W sk∏ad
ka˝dego z nich wchodzi sieç odbior-
ników stacjonarnych, dokonujàcych
analizy sygna∏ów GPS w sposób ciàg∏y
i pracujàcych niezale˝nie od stacji ob-
s∏ugujàcych u˝ytkowników naziemnych.
System WAAS (Wide-Area Augmen-
tation System), który rozpoczà∏ prac´
w roku 2003, sk∏ada si´ z pokrywajàcej
ca∏e Stany Zjednoczone sieci stacji mo-
nitorujàcych jakoÊç sygna∏ów GPS [ilu-
stracja na poprzedniej stronie]. Stacje te
pe∏nià funkcj´ analogicznà do odbior-
ników stacjonarnych w technice D-GPS,
równie˝ dostarczajà poprawek zwi´k-
szajàcych precyzj´ pomiarów. Dodat-
kowo jednak sieç zbiera poprawki ze
wszystkich stacji, generujàc gwaran-
towany zakres b∏´du niezb´dny do na-
wigacji lotniczej. Nast´pnie za poÊred-
nictwem satelitów geostacjonarnych
przesy∏a te dane pilotom. W razie po-
trzeby WAAS uaktualnia gwarantowany
zakres b∏´du co 7 s. System okreÊla po-
zycje samolotów b´dàcych na wysokoÊci
przelotowej i pomaga im wykonaç po-
dejÊcie do làdowania a˝ do wysokoÊci
oko∏o 100 m. Nad podobnymi systema-
mi pracuje si´ w Europie, Chinach, Ja-
ponii, Indiach, Australii i Brazylii.
W momencie, gdy koƒczy si´ praca
WAAS, samolot przejmujà systemy lot-
niskowe, by bezpiecznie poprowadziç go
przez koƒcowy odcinek Êcie˝ki podejÊcia.
W nieodleg∏ej przysz∏oÊci system LAAS
(Local-Area Augmentation System) umo˝-
liwi w pe∏ni automatyczne làdowanie
przy zerowej widocznoÊci. Poniewa˝ sys-
tem obs∏uguje tylko samoloty w rejonie
lotniska, do wysy∏ania poprawek i zakre-
sów b∏´du u˝ywa ∏àcznoÊci radiowej ma-
∏ego zasi´gu. Bliskim krewniakiem sys-
temu LAAS jest JPALS (Joint Precision
Approach and Landing System) – proto-
typowy system, który ma sprowadzaç sa-
moloty na rozko∏ysane pok∏ady lotniskow-
ców. W koƒcowym etapie podejÊcia piloci
muszà zmieniaç wysokoÊç lotu zgodnie z
wychyleniami pok∏adu z dok∏adnoÊcià
do jednego metra, bo inaczej mogà nie
zaczepiç hakiem zamocowanym z ty∏u
kad∏uba o liny hamujàce.
SpecjaliÊci z marynarki wojennej chcà
u∏atwiç làdowanie na lotniskowcach za
pomocà systemu JPALS, w którym na
lotniskowcu umieszcza si´ dodatkowy
odbiornik, pe∏niàcy rol´ stacjonarnego
w technice D-GPS. Próby tego systemu
powinny rozpoczàç si´ jeszcze w tym
roku. Zarówno LAAS, jak i JPALS to sys-
temy wykorzystujàce cz´stotliwoÊç dud-
nieƒ – by zapewniç precyzj´ niezb´dnà
przy wykonywaniu najtrudniejszych lot-
niczych manewrów, wymagajà wi´c sy-
gna∏ów w dwóch ró˝nych pasmach.
JPALS b´dzie dzia∏a∏ na bazie wojsko-
wych sygna∏ów, ju˝ dziÊ dost´pnych w
pasmach L1 i L2.
Mimo ˝e dzi´ki tym wszystkim ulep-
szeniom GPS bardzo si´ upowszechni,
amerykaƒski rzàd snuje ju˝ plany dalsze-
go rozwoju globalnego systemu lokaliza-
cji satelitarnej. Projekt znany jest jako
GPS III. Celem jest uzyskanie jeszcze
wi´kszej precyzji i niezawodnoÊci, wi´k-
szej odpornoÊci na zak∏ócenia i celowe
zag∏uszanie, a tak˝e utorowanie drogi al-
ternatywnym systemom lokalizacji oraz
nowym, bardziej wymagajàcym zastoso-
waniom, takim jak inteligentne auto-
strady lub systemy bezpieczeƒstwa ru-
chu. W odpowiedzi koncerny walczàce
o ten potencjalnie wart wiele miliardów
dolarów rynek – Boeing oraz konsorcjum
Lockheed Martin i Spectrum Astro –
zapowiedzia∏y, ˝e b´dà ubiegaç si´ o kon-
trakty rzàdowe. Start pierwszego sateli-
ty systemu GPS III mo˝e nastàpiç ju˝ na
poczàtku najbli˝szego dziesi´ciolecia.
n
CZERWIEC 2004 ÂWIAT NAUKI
73
GPS w czasie wojny
W ostatnich latach liczba cywilnych u˝ytkowników GPS znacznie przewy˝szy∏a liczb´ u˝yt-
kowników wojskowych, z myÊlà o których powsta∏ ten system. Cywilny sygna∏ jest dost´p-
ny dla ka˝dego, kto posiada odbiornik GPS. Poniewa˝ jednak si∏y zbrojne Stanów Zjednoczo-
nych i ich sojusznicy wykorzystujà GPS do nawigacji i naprowadzania pocisków, cele wojskowe
zyskujà priorytet w razie zagro˝enia wybuchem konfliktu. W rejonach Êwiata, gdzie toczà si´
walki, Stany Zjednoczone sà w stanie skutecznie zak∏ócaç sygna∏ GPS za pomocà silnych na-
dajników dzia∏ajàcych dok∏adnie w pasmach radiowych u˝ywanych przez system GPS. Jed-
noczeÊnie wcià˝ mogà korzystaç z zastrze˝onych sygna∏ów wojskowych, które sà w bez-
piecznej odleg∏oÊci od zak∏ócanych pasm cywilnych. W tej sytuacji przeciwnik nie ma ˝adnej
mo˝liwoÊci korzystania z systemu GPS, poniewa˝ kody sygna∏ów wojskowych sà tajne. Po-
dejmowane przez wroga próby zak∏ócania cz´stotliwoÊci zastrze˝onych by∏yby na d∏u˝szà me-
t´ skazane na niepowodzenie, poniewa˝ wojska amerykaƒskie mogà szybko zlokalizowaç i
zniszczyç urzàdzenia zak∏ócajàce – jak udowodni∏a to niedawno wojna w Iraku. Cywilne od-
biorniki GPS mog∏yby dzia∏aç bez przeszkód poza rejonem konfliktu, poniewa˝ sygna∏y za-
k∏ócajàce s∏abnà w miar´ oddalania si´ od nadajnika.
Global Positioning System: Theory and Applications Set. Red. Bradford W. Parkinson, James J.
Spilker, jr, Penina Axelrad i Per Enge; American Institute of Aeronautics and Astronautics, 1996.
Proposed New L5 Civil GPS Codes. J. J. Spilker, jr i A. J. Van Dierendonck; Navigation: Journal
of the Institute of Navigation, tom 48, nr 3, s. 135-143; jesieƒ 2001.
Global Positioning System: Signals, Measurements, and Performance. Pratap Misra i Per Enge;
Ganga-Jamuna Press, 2001.
The Rosum Television Positioning Technology. M. Rabinowitz i J. J. Spilker; Proceedings of the 59th
Annual Meeting of the Institute of Navigation; 2003. Wi´cej informacji na stronie: www.ion.org
GPS World. Miesi´cznik wydawany przez Advanstar Communications: www.gpsworld.com
Galileo’s World. Kwartalnik wydawany przez Advanstar Communications w latach 1999-2002.
Institute of Navigation: www.ion.org
GPS Research Laboratory w Stanford University: www.stanford.edu/group/GPS/
JEÂLI CHCESZ WIEDZIEå WI¢CEJ
Ulepszony GPS posadzi samolot
na pasie
nawet w warunkach zerowej widocznoÊci.
Wyszukiwarka
Podobne podstrony:
200406 3615
200406 3629
200406 3596
200406 3608
200406 3627
200406 3637
pd5 i czekalowska 20040624
200406 3601
200406 3639
200406 3609
200406 3603
200406 3624
3638
200406 3621
200406 3602
więcej podobnych podstron