Wykład 10
Wykład 10
Podstawowe algorytmy
Podstawowe algorytmy
sterowania
sterowania
Podstawy Automatyki
Podstawy Automatyki
Janusz KOWAL
Janusz KOWAL
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza
Hutnicza
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
2
Plan wykładu:
Plan wykładu:
9
Sterowanie proporcjonalne
9
Sterowanie całkowe
9
Sterowanie proporcjonalno - całkowe
9
Sterowanie proporcjonalno - różniczkowe
9
Sterowanie proporcjonalno - całkowo - różniczkowe
9
Regulacja prędkości silnika prądu stałego
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
3
W regulatorze z proporcjonalnym algorytmem sterowania
(typu P), związek pomiędzy sygnałem
wyjściowym
regulatora u(t), a sygnałem uchybu e(t) jest następujący:
)
(
)
(
t
e
K
t
u
p
=
S
S
terowani
terowani
e
e
proporcjonalne
proporcjonalne
gdzie: K
p
jest nazwane wzmocnieniem proporcjonalnym
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
4
Regulator proporcjonalny jest wzmacniaczem
z
nastawianym wzmocnieniem.
Po zastosowaniu transformaty Laplace’a:
p
K
s
E
s
U
=
)
(
)
(
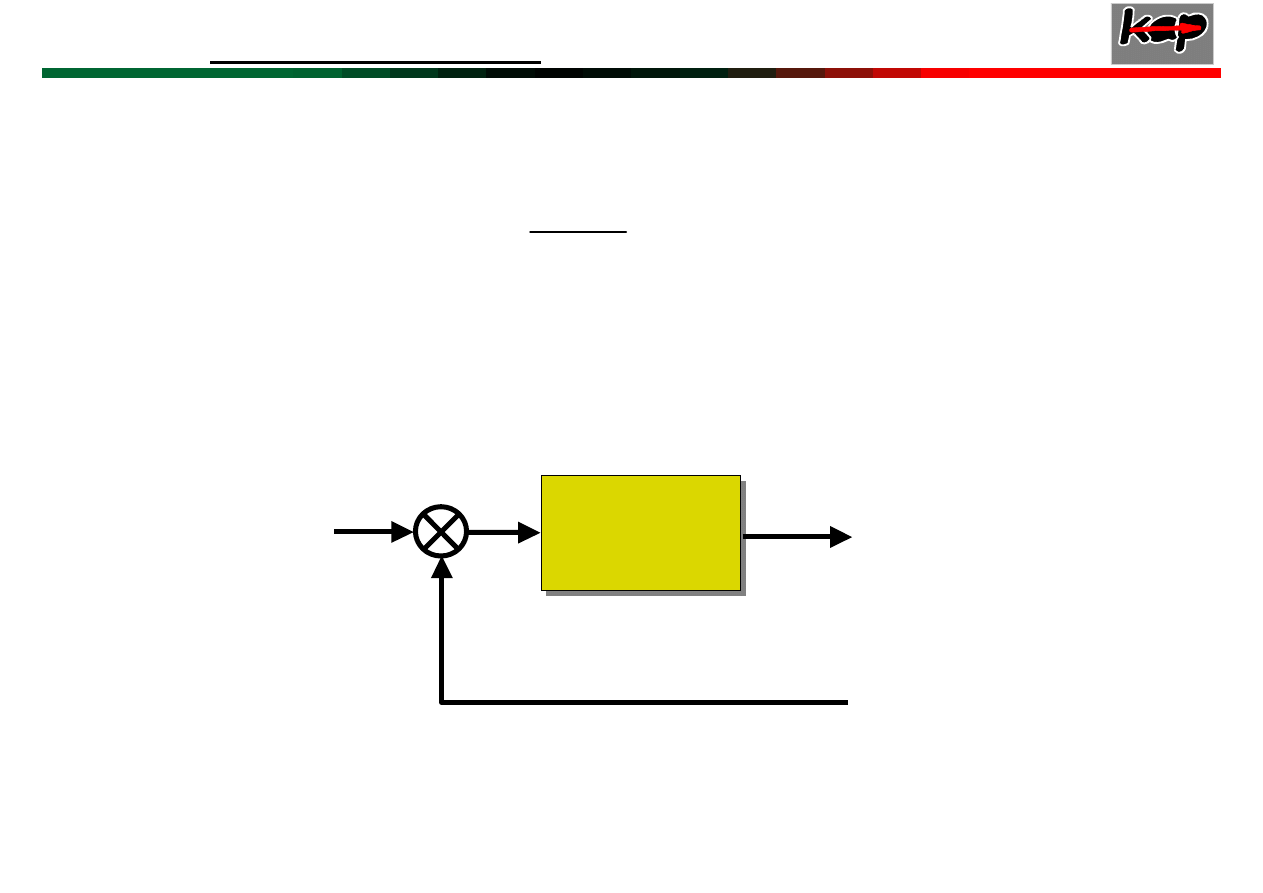
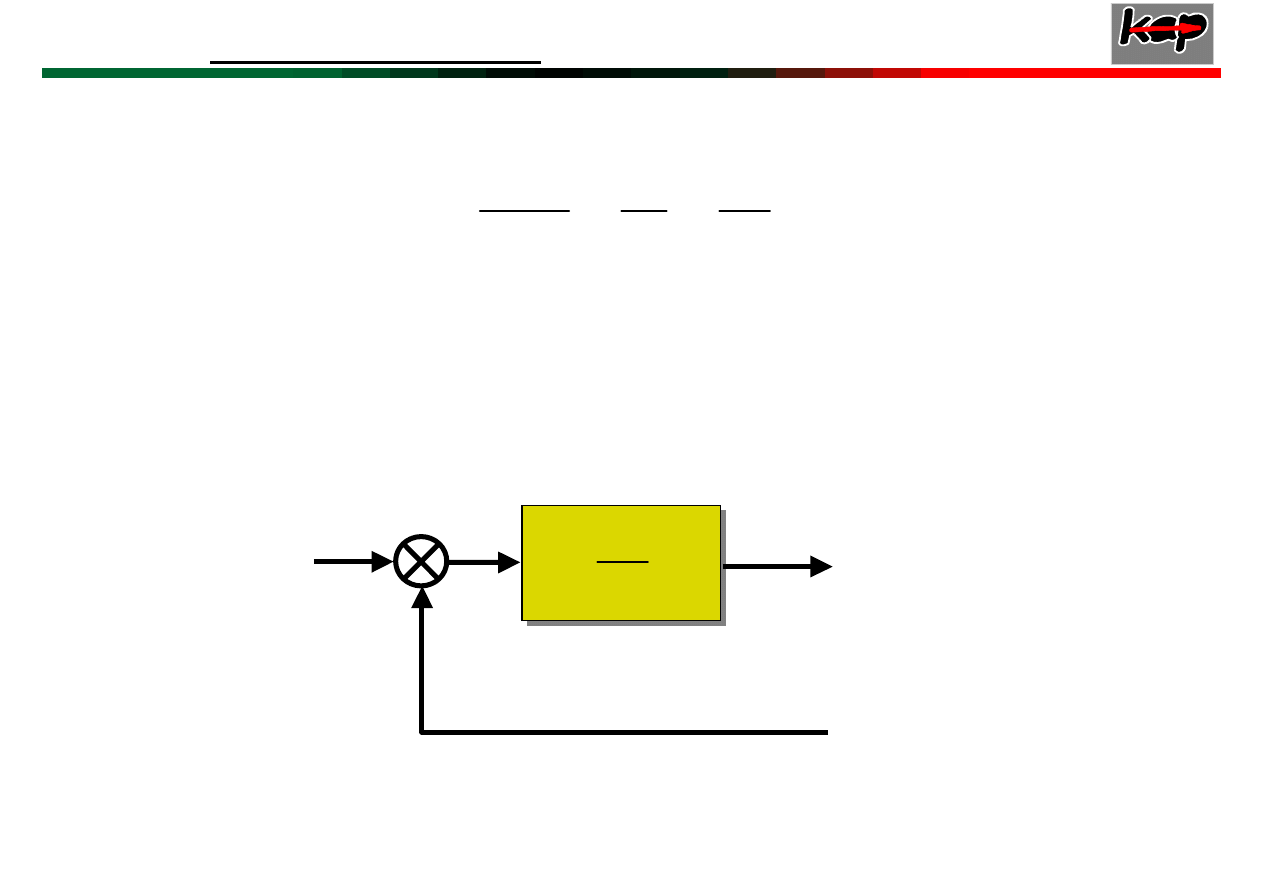
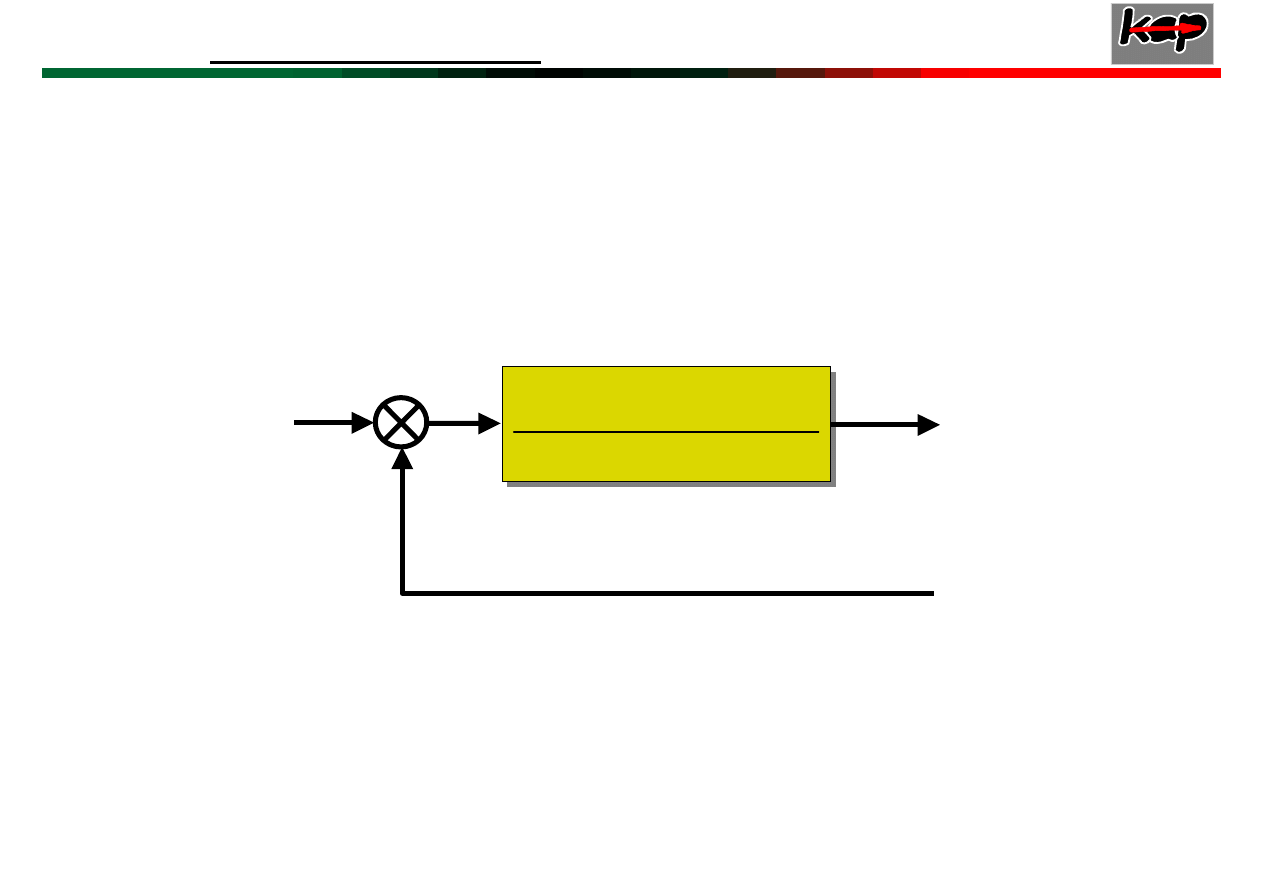
Schemat blokowy regulatora typu P
K
p
K
p
–
E(s)
U(s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
5
S
S
terowani
terowani
e
e
c
c
a
a
ł
ł
kow
kow
e
e
W regulatorze z całkowym algorytmem sterowania, w
skrócie typu I, przyrost wartości sygnału wyjściowego u(t)
zmienia się proporcjonalnie do sygnału uchybu e(t), czyli:
)
(
1
)
(
)
(
t
e
T
t
e
K
dt
t
du
i
i
=
=
lub:
∫
=
t
o
i
dt
t
e
K
t
u
)
(
)
(
gdzie: K
i
– stała nastawna
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
6
Transmitancja regulatora całkowego ma postać:
U s
E s
K
s
Ts
i
i
( )
( )
=
=
1
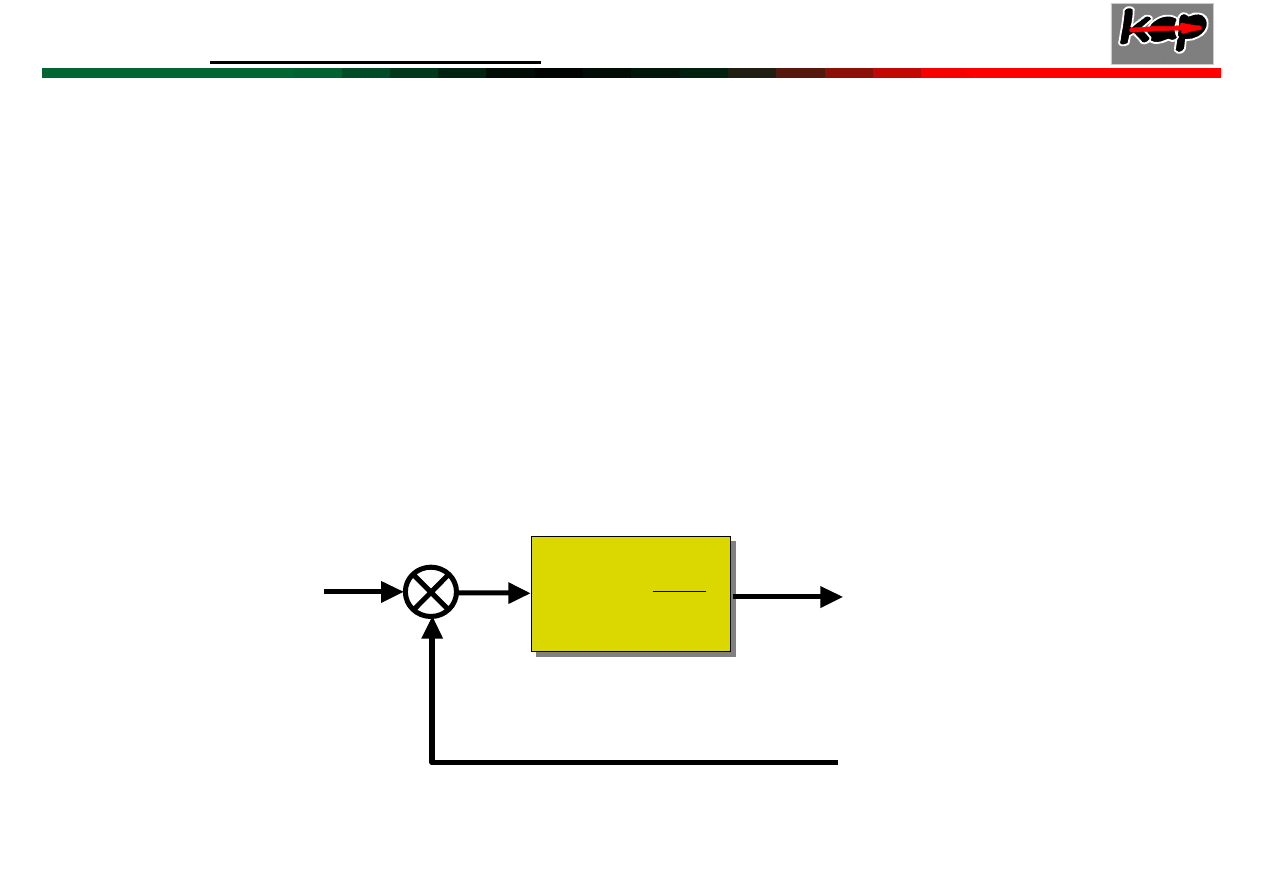
Jeśli wartość e(t) jest stała przez okres czasu T
i
, to wartość
u(t) podwoi się po upływie tego czasu. Dla wartości uchybu
e(t) równego zero wartość u(t) pozostaje niezmienna.
Schemat blokowy regulatora typu I
E(s)
U(s)
–
s
K
i
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
7
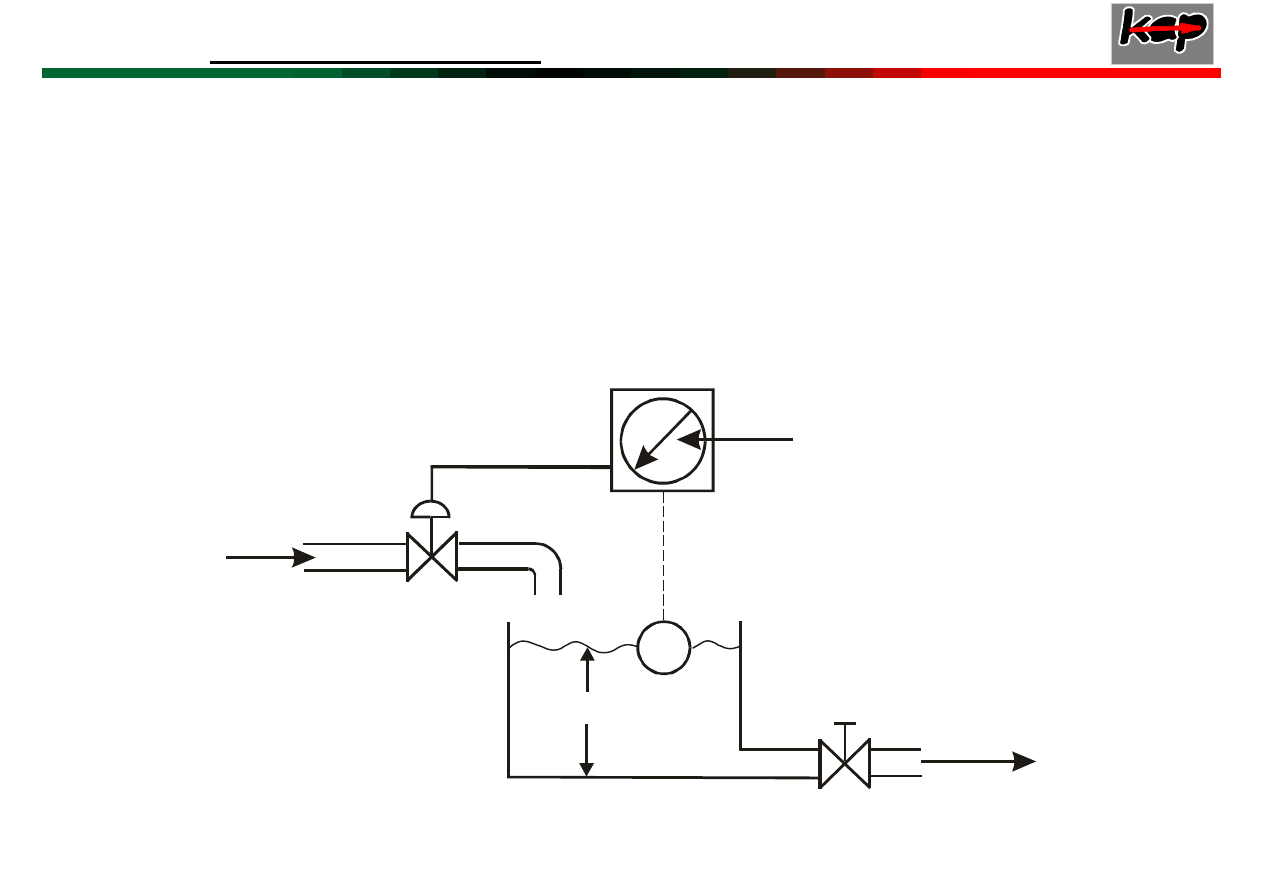
Przykład 1.
Sterowanie proporcjonalne układu poziomowania cieczy, przy
skokowym sygnale wejściowym, da uchyb w stanie
ustalonym. Uchyb może być wyeliminowany, jeśli regulator
będzie zawierał algorytm sterowania całkowego.
Układ regulacji poziomu cieczy w zbiorniku
R
0
q
Q +
x
X
+
i
q
Q
+
C
h
H
+
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
8
9
Regulator jest regulatorem całkującym
9
Nie jest znany model układu - (może on być nieliniowy)
- dokonujemy jego linearyzacji wokół punktu pracy,
zakładając małe odchylenia x, q
i
, h i q
o
od ich wartości
w stanie ustalonym
9
Początek układu współrzędnych ustawiamy w punkcie
pracy, wtedy układ można traktować jako stabilny
Założenia:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
9
Schemat blokowy układu
X(s)
E(s)
H(s)
–
s
K
1
+
RCs
R
Transmitancja układu zamkniętego ma postać:
KR
s
RCs
KR
s
G
s
G
s
G
s
G
s
X
s
H
O
R
O
R
+
+
=
⋅
+
⋅
=
2
)
(
)
(
1
)
(
)
(
)
(
)
(
Stąd:
KR
s
RCs
s
RCs
s
X
s
H
s
X
s
X
s
E
+
+
+
=
−
=
2
2
)
(
)
(
)
(
)
(
)
(
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
10
Uchyb statyczny
0
1
)
(
)
(
lim
2
2
0
=
+
+
+
=
=
→
s
KR
s
RCs
s
RCs
s
s
sE
e
s
u
9
Wynika stąd, że sterowanie całkowe układem
poziomowania cieczy, eliminuje uchyb statyczny w
odpowiedzi na skokowy sygnał wejściowy.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
11
S
S
terowani
terowani
e
e
proporcjonalno
proporcjonalno
-
-
c
c
a
a
ł
ł
kowe
kowe
Algorytm pracy regulatora proporcjonalno-całkowego, w
skrócie typu PI, zdefiniowany jest wzorem:
∫
+
=
t
o
i
p
p
dt
t
e
T
K
t
e
K
t
u
)
(
)
(
)
(
a transmitancja regulatora ma postać:
+
=
s
T
K
s
E
s
U
i
p
1
1
)
(
)
(
gdzie:
K
p
- wzmocnienie proporcjonalne,
T
i
- czas całkujący (czas zdwojenia).
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
12
9
Stała czasowa całkowania
T
i
umożliwia
zmianę
parametrów algorytmu całkowego
9
Zmiana wartości K
p
wpływa zarówno na część
proporcjonalną, jak i na część całkową algorytmu
sterowania.
9
Odwrotność stałej czasowej T
i
jest nazywana szybkością
działania całkującego.
Schemat blokowy regulatora typu PI
E(s)
U(s)
–
+
s
T
K
i
p
1
1
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
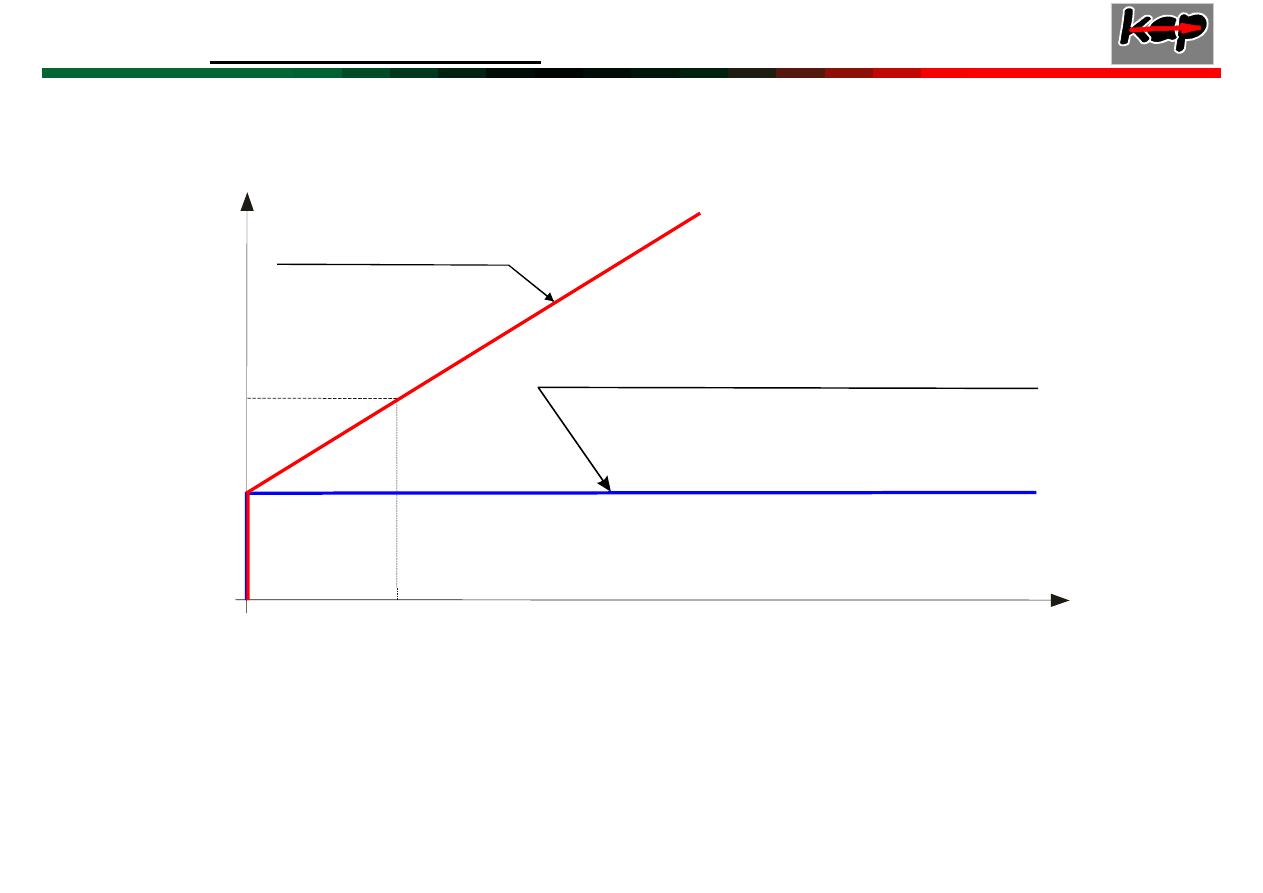
13
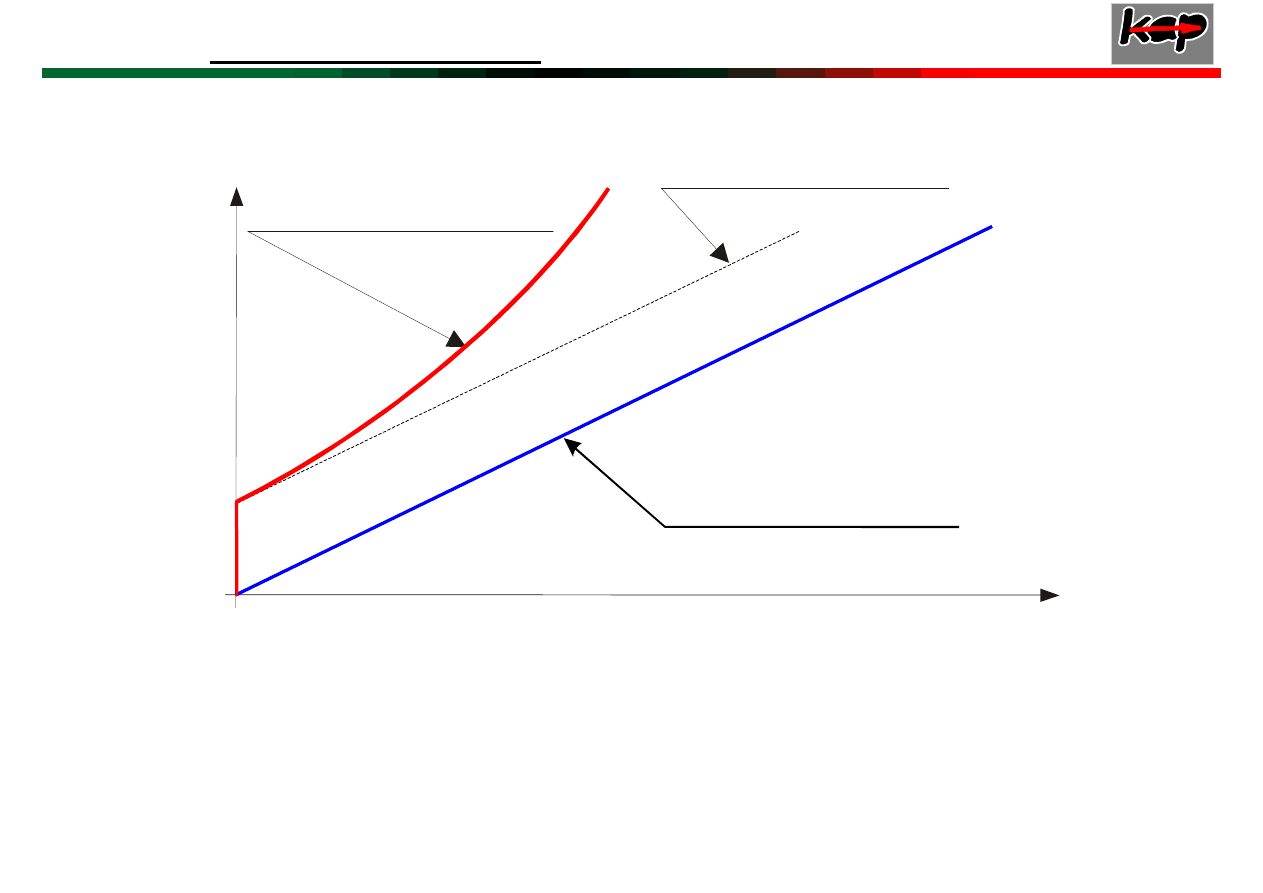
Sterowanie PI
Odpowiedź skokowa regulatora typu PI
p
K
0
u(t)
t
i
T
p
K
2
e(t)
Sygnał wejściowy
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
14
S
S
terowani
terowani
e
e
proporcjonalno
proporcjonalno
-
-
r
r
ó
ó
ż
ż
niczkowe
niczkowe
Algorytm pracy regulatora proporcjonalno-różniczkowego, w
skrócie typu PD, zdefiniowany jest wzorem:
dt
t
de
T
K
t
e
K
t
u
d
p
p
)
(
)
(
)
(
+
=
a transmitancja regulatora ma postać:
)
1
(
)
(
)
(
s
T
K
s
E
s
U
d
p
+
=
gdzie:
K
p
- wzmocnienie proporcjonalne,
T
d
- stała nazywana czasem różniczkującym
lub czasem wyprzedzenia
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
15
9
Z algorytmem sterowania różniczkowego mamy do
czynienia, gdy wartość sygnału wyjściowego regulatora
jest proporcjonalna do szybkości zmiany sygnału uchybu.
Czas różniczkujący T
d
jest miarą, na ile sterowanie PD
wyprzedza sterowanie z regulatorem proporcjonalnym P.
Schemat blokowy regulatora typu PD
E(s)
U(s)
–
(
)
s
T
K
d
p
+
1

Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
16
Sygnał wejściowy
Sterowanie PD
d
T
Odpowiedź liniowa regulatora typu PD
0
u(t)
t
e(t)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
17
9
Różniczkowy algorytm sterowania
ma charakter
wyprzedzający. „Podbija” on sygnał wyjściowy
9
Wada: wzmacnia sygnały szumów i może powodować
efekt nasycenia w urządzeniu wykonawczym
9
Algorytm ten stabilizuje
układ, nie pogarszając
właściwości dynamicznych, uchyb ustalony jest znacznie
większy niż
przy algorytmie
całkowym,
przy
równoczesnym zwiększeniu zapasu stabilności
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
18
Równanie regulatora PID ma postać:
dt
t
de
T
K
dt
t
e
T
K
t
e
K
t
u
t
o
d
p
i
p
p
)
(
)
(
)
(
)
(
∫
+
+
=
a transmitancja regulatora ma postać:
+
+
=
s
T
s
T
K
s
E
s
U
d
i
r
1
1
)
(
)
(
gdzie:
K
p
- wzmocnienie proporcjonalne,
T
i
- czas całkującym,
T
d
- czas różniczkujący.
S
S
terowani
terowani
e
e
proporcjonalno
proporcjonalno
-
-
r
r
ó
ó
ż
ż
niczko
niczko
wo
wo
-
-
całkowe
całkowe
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
19
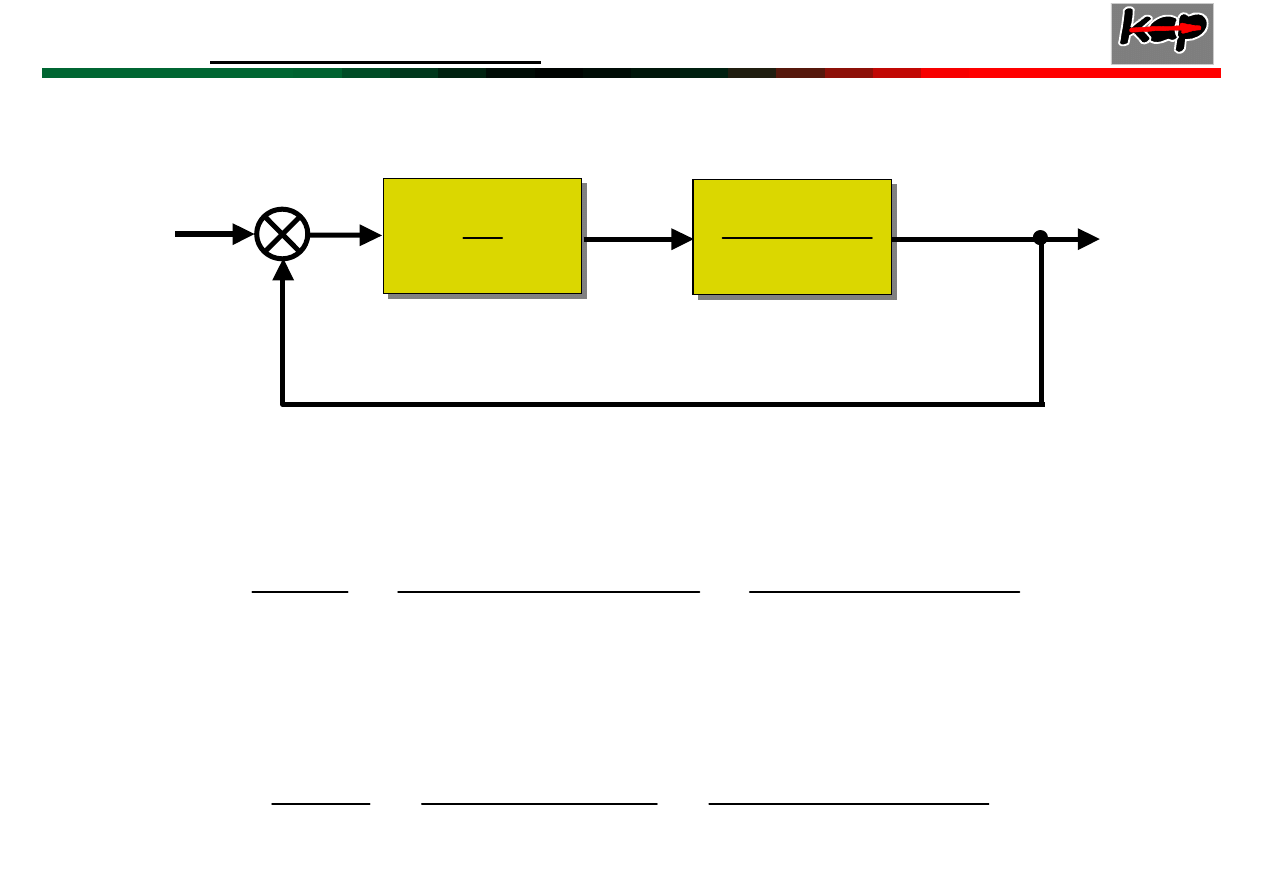
Schemat blokowy regulatora typu PID
E(s)
U(s)
–
(
)
s
T
s
T
T
s
T
K
i
d
i
i
p
2
1
+
+
Ten połączony algorytm ma zalety każdego z trzech
wcześniej wspomnianych algorytmów.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
20
Odpowiedź liniowa regulatora typu PID
0
u(t)
t
Sygnał wejściowy
e(t)
Sterowanie PID
Sterowanie PD
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
21
Regulacja pr
Regulacja pr
ę
ę
dko
dko
ś
ś
ci
ci
silnika pr
silnika pr
ą
ą
du sta
du sta
ł
ł
ego
ego
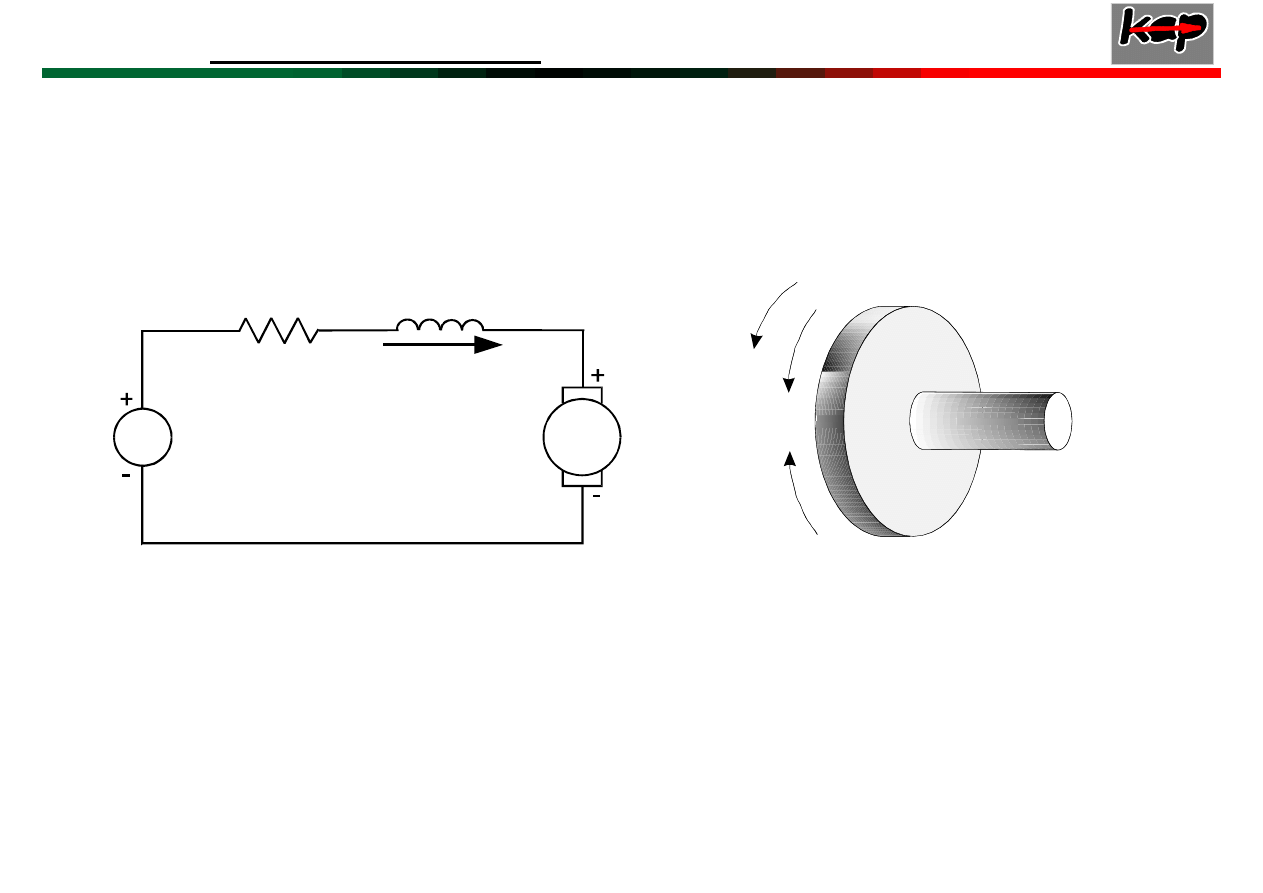
a
R
a
L
a
v
Θ
=
.
e
K
e
a
i
∼
a) obwód elektryczny silnika
prądu stałego
T
m
Θ
m
b
Θ
.
m
J
b) model mechaniczny wirnika
silnika prądu stałego
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
22
Moment bezwładności wirnika wynosi J
m
, opory ruchu
reprezentuje współczynnik b, a moment czynny M = K
t
i
a
Równanie dynamiczne ruchu układu ma postać:
z
a
t
m
m
m
M
i
K
b
J
+
=
+ θ
θ
&
&&
Równanie obwodu elektrycznego:
m
e
a
a
a
a
a
K
v
i
R
dt
di
L
θ&
−
=
+
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
23
Jeżeli zdefiniujemy wektor stanu układu jako:
[
]
T
m
m
i
,
,
x
a
θ
θ
&
=
to macierze układu i sterowania mają postać:
−
−
−
=
a
a
a
e
m
t
m
L
R
L
K
J
K
J
b
0
0
0
1
0
A
=
a
L
1
0
0
B
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
24
Równania układu zapiszemy w postaci:
=
+
+
+
=
+
a
a
a
a
a
e
z
a
t
m
v
i
R
dt
di
L
K
M
i
K
b
J
m
m
m
θ
θ
θ
&
&
&&
gdzie: M
z
jest momentem zakłócającym
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
25
=
+
+
+
=
+
a
a
a
a
a
e
a
t
m
v
i
R
dt
di
L
y
K
z
i
K
by
y
J &
Stosując
przekształcenie Laplace’a, przy zerowych
warunkach początkowych otrzymamy równania algebraiczne:
=
+
+
+
=
+
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
sJ
m
s
V
s
I
R
s
I
sL
s
Y
K
s
Z
s
I
K
s
bY
s
Y
a
a
a
a
a
e
a
t
Definiując sygnał wyjściowy
m
θ&
∆
=
y
i zakłócający
z
M
z
∆
=
otrzymamy:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
26
Obliczamy Y(s):
gdzie:
e
t
a
t
K
K
bR
K
A
+
=
e
t
a
K
K
bR
B
+
=
1
)
(
)
1
)(
1
(
)
(
)
1
)(
1
(
)
(
2
1
2
1
s
Z
s
s
B
s
V
s
s
A
s
Y
a
+
+
+
+
+
=
τ
τ
τ
τ
a
m
e
t
a
a
m
a
a
m
a
a
m
L
J
K
K
bR
L
J
bL
R
J
bL
R
J
2
)
(
4
)
(
)
(
2
1
2
,
1
+
−
+
+
=
+
−
−
τ
9
Jeżeli b=0 i L
a
jest małe, wtedy stała nazywana
jest elektryczną stałą czasową zaś stała
nazywana jest elektromechaniczną stałą czasową.
a
a
R
L
=
2
τ
e
t
m
a
K
K
J
R
=
1
τ
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
27
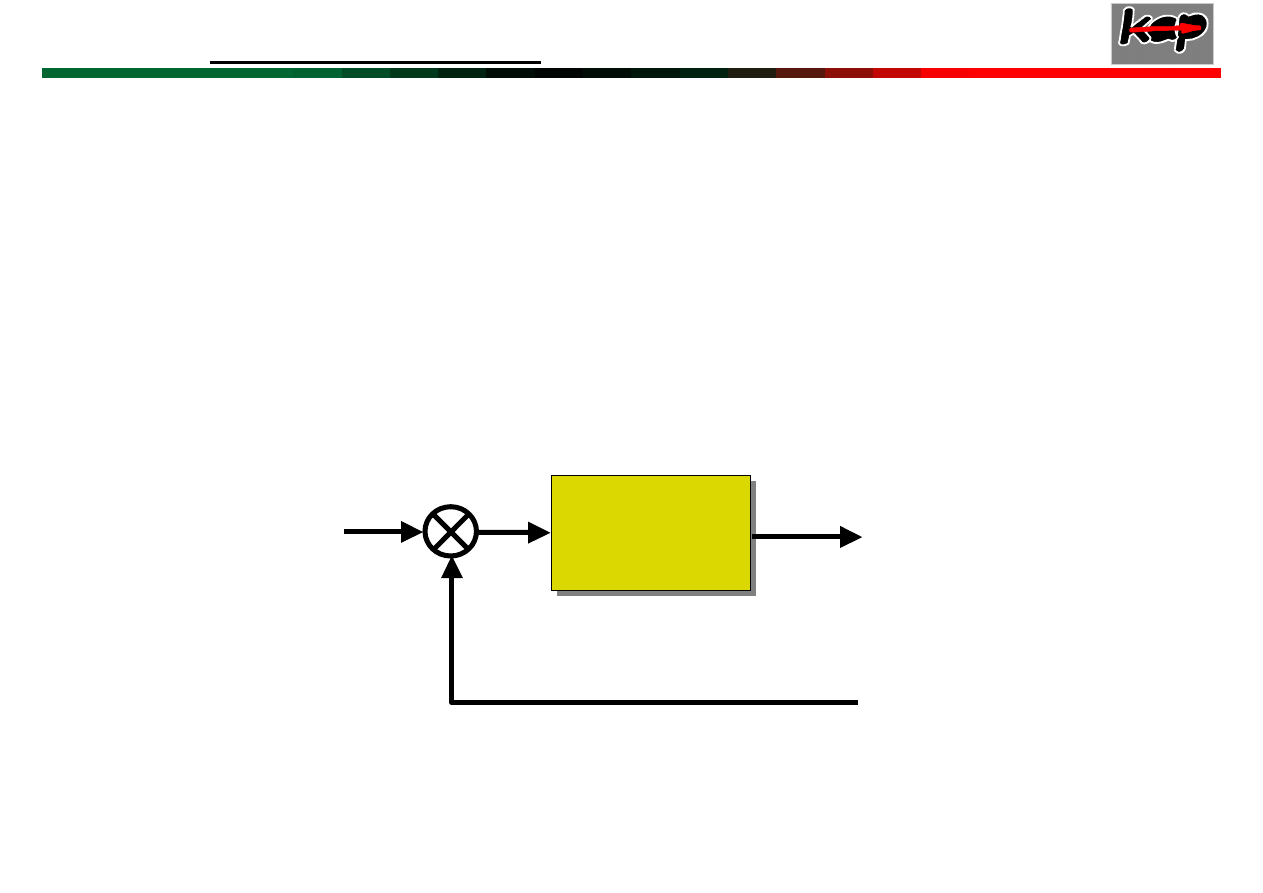
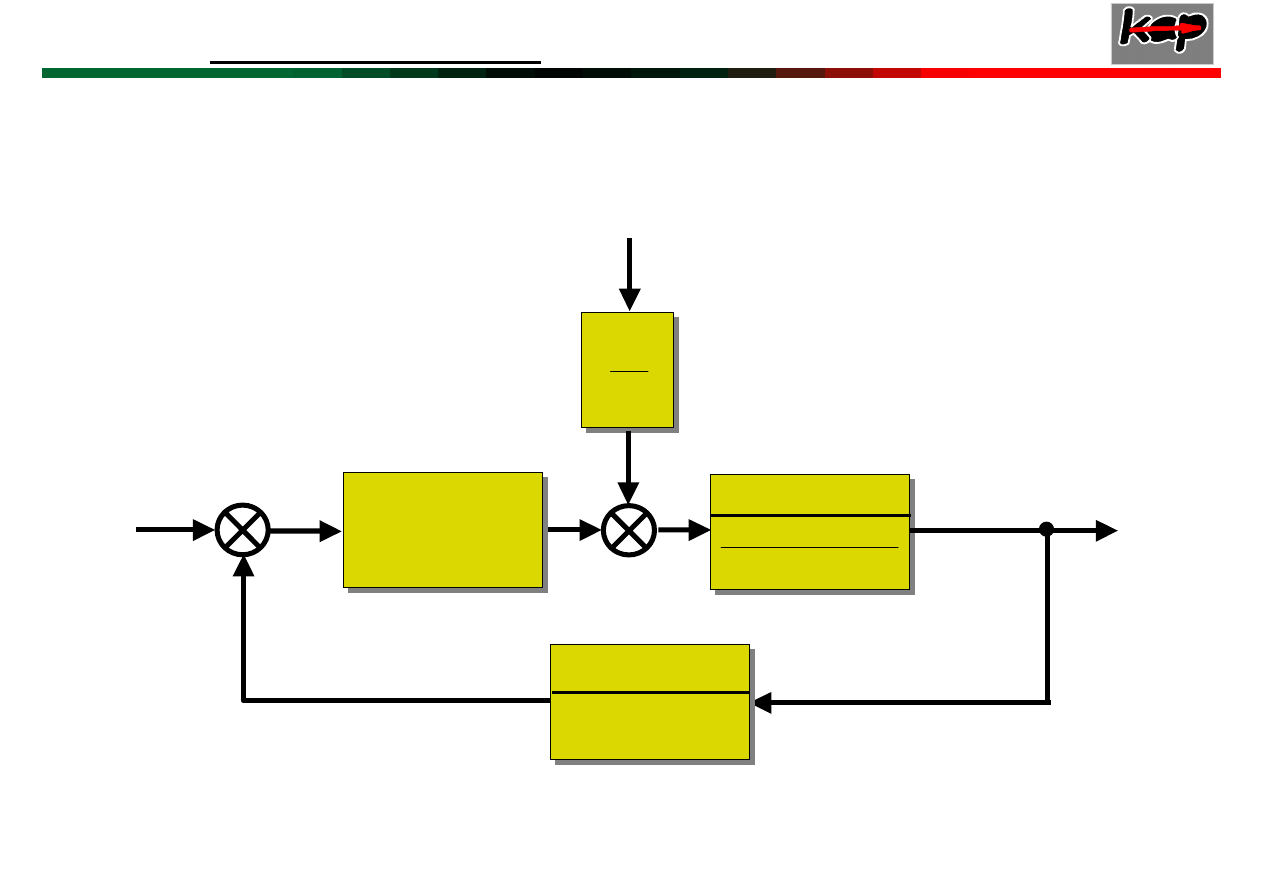
W(s)
E(s)
Y(s)
Y(s)
Z(s)
–
A
B
Regulator
(
)(
)
1
1
2
1
+
+
s
s
A
τ
τ
Silnik
Czujnik
1
V
a
Schemat blokowy uk
Schemat blokowy uk
ł
ł
adu regulacji pr
adu regulacji pr
ę
ę
dko
dko
ś
ś
ci
ci
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
28
Zakładając, że w układzie zastosowany będzie regulator typu P,
dla którego:
G
R
(s) = K,
)
1
)(
1
(
)
(
2
1
+
+
=
s
s
A
s
G
O
τ
τ
Równanie charakterystyczne pętli zamkniętej:
)
(
)
(
1
1
s
G
s
G
O
R
+
ma postać:
0
1
)
(
2
1
2
2
1
=
+
+
+
+
AK
s
s
τ
τ
τ
τ
Bieguny układu w pętli zamkniętej są funkcją wzmocnienia K:
2
1
2
1
2
2
2
1
2
,
1
2
)
1
(
4
)
(
)
(
τ
τ
τ
τ
τ
τ
τ
τ
AK
s
+
−
+
+
−
=
+
−
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
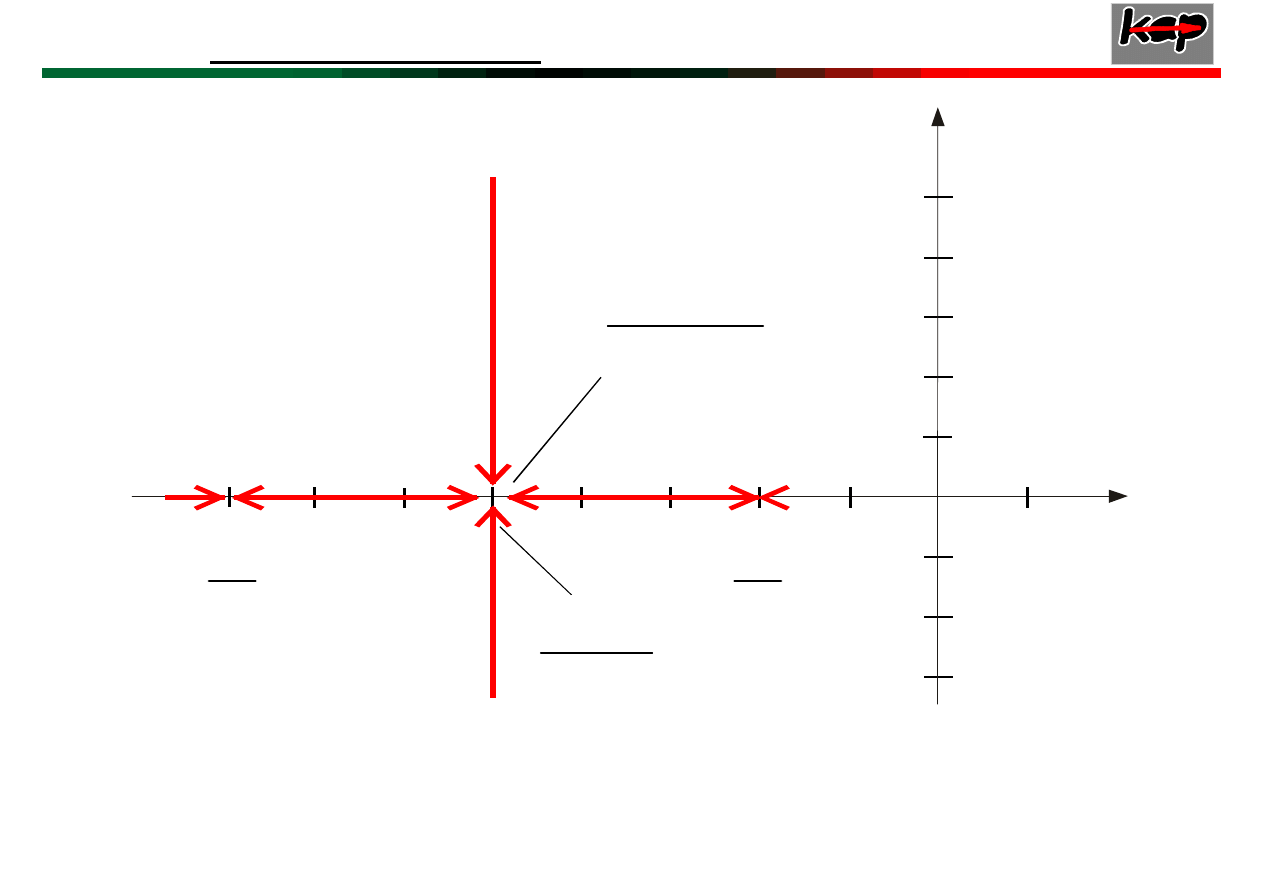
29
Lokalizacja biegunów na płaszczyźnie zmiennej zespolonej dla
zmieniającej się wartości K
K=0
Im(s)
Re(s)
K=0
2
1
τ
−
2
1
τ
−
(
)
A
K
2
1
2
2
1
4
τ
τ
τ
τ −
=
2
1
2
1
2
τ
τ
τ
τ +
−
0
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
30
Pierwiastki lokują się w:
2
1
1
,
1
τ
τ
−
−
dla otwartej pętli (K = 0) i zaczynają się do siebie zbliżać
wraz ze wzrostem wartości K poza przedział:
,
4
)
(
0
2
1
2
2
1
A
K
τ
τ
τ
τ −
<
<
co oznacza zmniejszenie stałej czasowej układu.
A
K
2
1
2
2
1
4
)
(
τ
τ
τ
τ −
>
składowa rzeczywista pierwiastków nie zależy od K,
natomiast składowa urojona rośnie i w ten sposób czas
odpowiedzi układu maleje.
Dla wartości:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
31
9
Lepsze sterowanie w stanach
ustalonych, bez
konieczności stosowania dużych wzmocnień można
uzyskać wprowadzając regulator całkujący.
9
Zakładając, że w układzie wprowadzimy dodatkowo
regulację całkującą, transmitancja regulatora przyjmie
postać:
s
T
K
s
G
i
R
=
)
(
gdzie:
i
T
1
jest miarą szybkości odpowiedzi
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
32
Najistotniejszym zadaniem regulatora całkującego jest
zmniejszenie lub wyeliminowanie błędu w stanie ustalonym,
lecz jest to okupione pogorszeniem odpowiedzi stanu
przejściowego.
Równanie charakterystyczne dla układu z regulatorem
całkującym:
0
)
(
2
2
1
3
2
1
=
+
+
+
+
i
T
K
A
s
s
s
τ
τ
τ
τ
Zwiększanie wzmocnienia
i
T
K
do nieznacznego przesunięcia pierwiastków dla danych
wartości K.
takiego układu doprowadzi
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
33
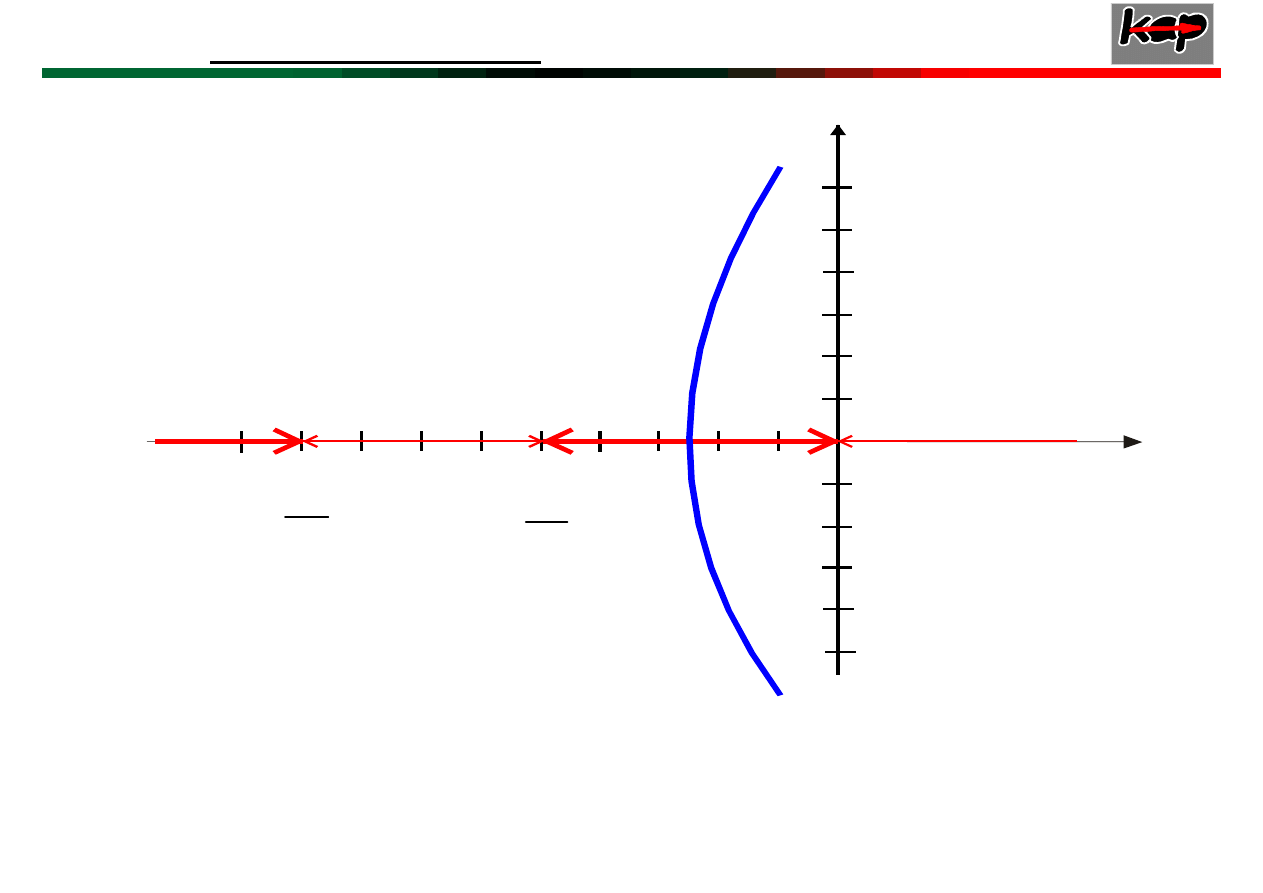
Lokalizacja pierwiastków równania charakterystycznego
K=0
K=0
K=0
2
1
τ
−
1
1
τ
−
0
Im(s)
Re(s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
34
9
Jeśli zwiększymy dynamikę odpowiedzi przy dużym
całkowitym wzmocnieniu, to odpowiedź będzie miała
charakter oscylacyjny.
9
Sposobem uniknięcia takiej niekorzystnej cechy dla
niektórych przypadków jest jednoczesne zastosowanie
sterowania proporcjonalnego i całkującego.
9
Pomimo tego, że regulacja całkowa polepsza śledzenie
odpowiedzi w stanach ustalonych, spowalnia jednak czas
odpowiedzi przy niezmiennym przeregulowaniu.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
35
Przy równoczesnym zastosowaniu regulacji proporcjonalnej,
czyli regulatora typu PI, napięcie sterujące dla rozważanego
przypadku przyjmie postać:
−
+
−
=
∫
t
o
i
a
d
y
w
T
y
w
K
η
ϑ
)
(
1
gdzie:
K - wzmocnienie proporcjonalne
Równanie ruchu układu możemy zapisać jako:
[
]
z
B
y
w
T
K
y
w
K
A
y
y
y
i
&
&
&
&
&&
&&
&
+
−
+
−
=
+
+
+
)
(
)
(
2
1
2
1
τ
τ
τ
τ
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
36
Tak jak w przypadku regulacji całkowej, gdy zakłócenie
(moment) i prędkość zadana są stałe, więc:
0
=
z&
0
=
w&
i
Wtedy równanie charakterystyczne układu
)
(
)
(
)
(
s
W
s
Y
s
G
=
zapiszemy następująco:
0
)
1
(
)
(
2
2
1
3
2
1
=
+
+
+
+
+
i
T
K
A
s
AK
s
s
τ
τ
τ
τ
Dobierając odpowiednio K i T
i
, można niezależnie ustawić
wartości współczynników przy s i wartości stałe, i w ten
sposób niezależnie
regulować
dwa
spośród trzech
parametrów w równaniu charakterystycznym.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
37
W przypadku zastosowania regulacji różniczkującej
transmitancja regulatora:
s
KT
s
G
d
R
=
)
(
W praktyce czysty element różniczkujący nie występuje.
Stosuje się go w połączeniu z proporcjonalnym i całkującym
by zwiększyć tłumienie i poprawić stabilność układu.
Regulator z elementem różniczkującym generuje odpowiedź
z wyprzedzeniem. Odpowiedź regulatora PD wyprzedza
odpowiedź regulatora P o T
D
– sekund.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
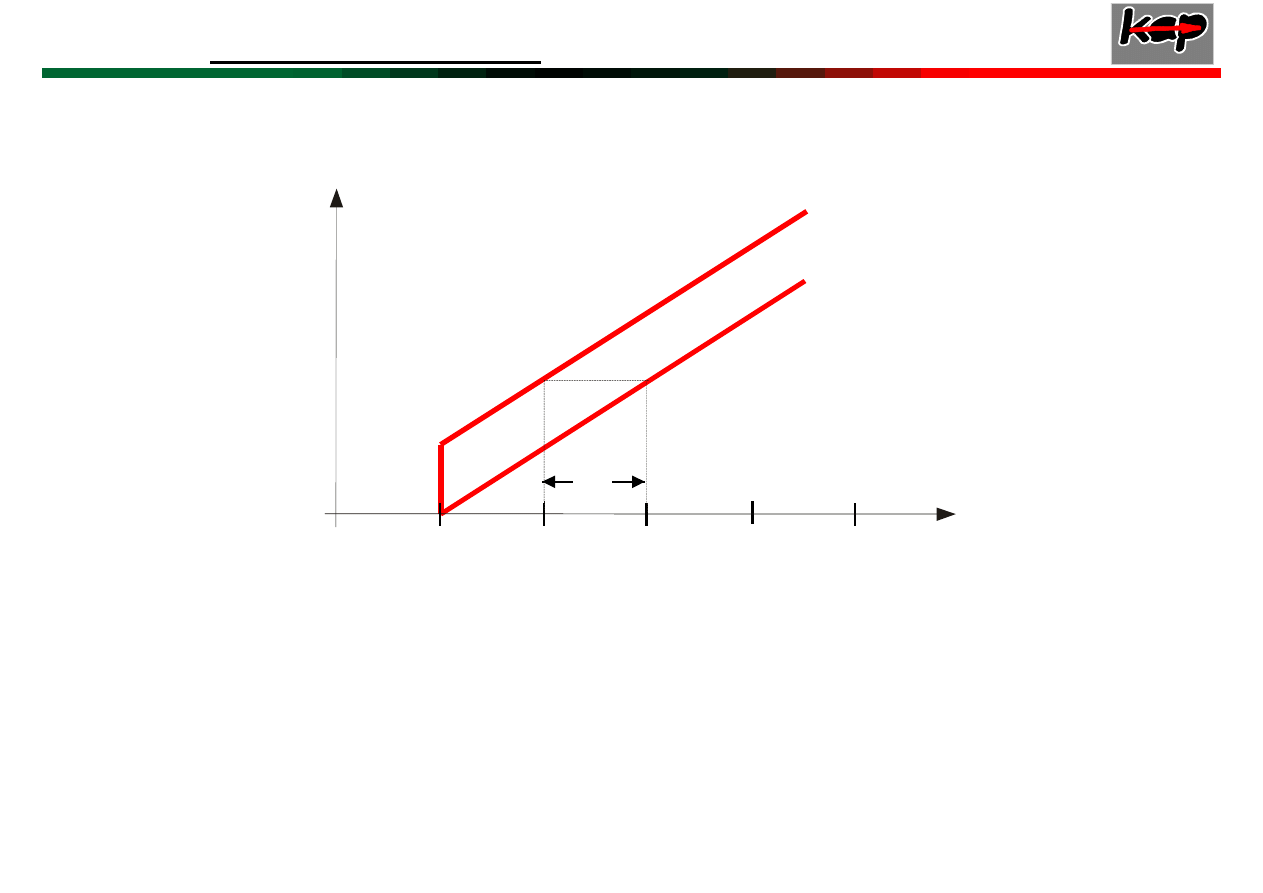
38
Charakterystyka czasowa regulatora PD dla wzrastającego
błędu e(t)
u(t)
t
0
2
3
4
1
5
T
D
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
39
Celem zmniejszenia błędów stanów ustalonych i przej-
ściowych przy zachowaniu stabilności i odpowiedniego
tłumienia możemy połączyć wszystkie trzy rodzaje regulacji
i otrzymać regulację proporcjonalno - całkowo - różniczkową:
Regulatory PID są powszechnie stosowane w przemyśle.
Ogólnie transmitancja regulatora PID przyjmuje postać:
+
+
=
s
T
s
T
K
s
G
D
i
R
1
1
)
(
By zaprojektować konkretny układ regulacji należy dobrać
stałe K, T
i
i T
D
by osiągnąć zamierzony rezultat.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
40
Dla rozważanego przykładu regulacji prędkości silnika z
regulatorem PID, napięcie sterujące przyjmuje postać:
−
+
−
+
−
=
∫
t
o
D
i
a
y
w
T
d
y
w
T
y
w
K
v
)
(
)
(
1
&
&
η
Różniczkując równanie układu w pętli zamkniętej otrzymujemy:
z
B
y
w
KT
y
w
T
K
y
w
K
A
y
y
y
D
i
&
&&
&&
&
&
&
&&
&&
&
+
−
+
−
+
−
=
+
+
+
)
(
)
(
]
[
)
(
2
1
2
1
τ
τ
τ
τ
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
41
Równanie charakterystyczne zapiszemy jako:
[
]
0
)
1
(
)
(
2
2
1
3
2
1
=
+
+
+
+
+
AK
s
AK
T
s
AKT
T
s
T
i
D
i
i
τ
τ
τ
τ
9
Jeśli równanie to podzielimy przez
τ
1
τ
2
T
i
, otrzymujemy
trzy współczynniki i trzy parametry (K, T
i
i T
D
).
9
Dołączenie działania różniczkującego do takiego układu
pozwala na pełniejsze kształtowanie jego dynamiki.
9
Rozważmy omawiany silnik prądu stałego i przyjmijmy:
K = 5, T
D
= 0,0004 i T
i
= 0,01.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
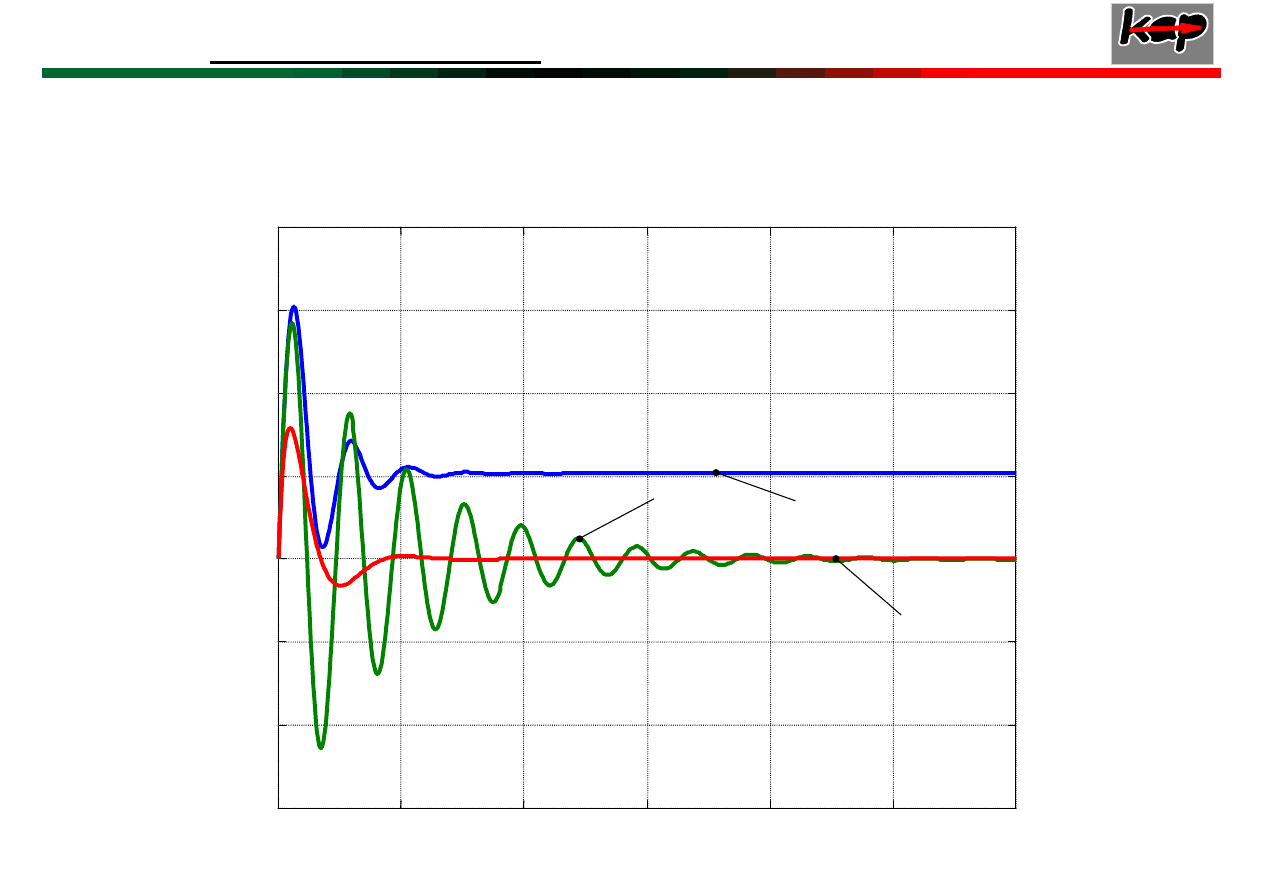
42
Odpowiedzi układu na skokową zmianę zakłócenia
dla różnych regulatorów
0
1
2
3
4
5
6
-6
-4
-2
0
2
4
6
8
Czas
Ampl
ituda
P
PI
PID
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Podstawowe algorytmy sterowania
Temat wykładu:
Temat wykładu:
Podstawowe algorytmy sterowania
Podstawowe algorytmy sterowania
Podstawy Automatyki
Podstawy Automatyki
43
0
1
2
3
4
5
6
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Czas
Ampl
ituda
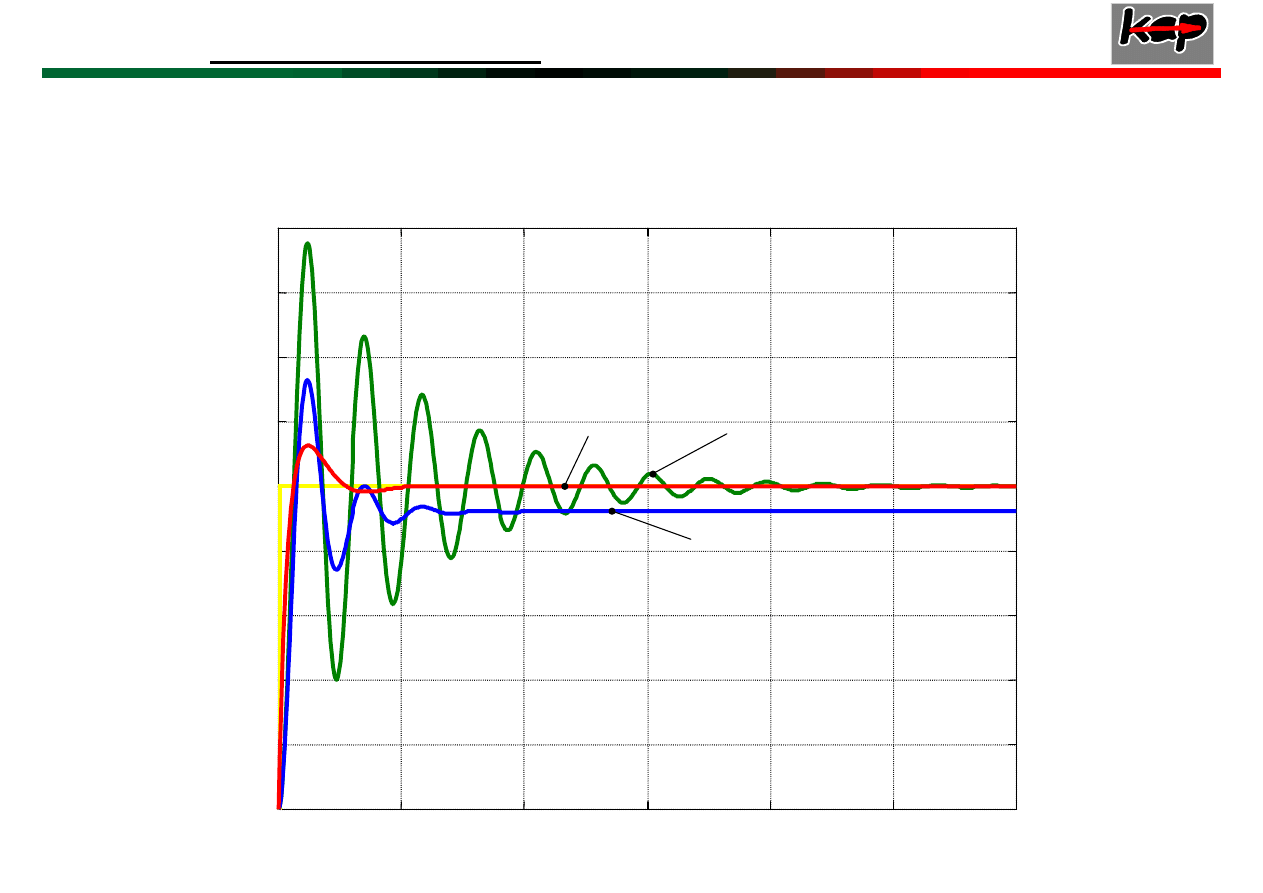
Odpowiedzi układu na skokową zmianę wartości zadanej
dla różnych regulatorów
P
PI
PID
Wyszukiwarka
Podobne podstrony:
9 podstawowe algorytmy sterowania nowy
9 podstawowe algorytmy sterowania nowy
9 podstawowe algorytmy sterowania nowy
Układy Napędowe oraz algorytmy sterowania w bioprotezach
nieodporny sprawozdanie, Pwr, Metody i algorytmy sterowania cyfrowego, sprawka
58 MT 10 Podstawka lutownicy
Instrukcja do zad proj 10 Podstawowe funkcje logiczne z z
Implementacja i badania algorytmów sterowania robotem dwukołowym
[pl book] fr delphi 7 i bazy danych r 10 podstawy tworzenia komponentow 7FDOYSNI5YQ5QOZJJ6PQHI2UFEOM
Przegląd podstawowych algorytmów
Podstawowym urządzeniem sterowanym w przemyśle przez?lowniki są klatkowe silniki indukcyjne prądu zm
21 10 Podstawy Prawaid 29056 Nieznany (2)
10 podstawy diagnostyki alergologicznejid 11004 ppt
Podstawy algorytmów ewolucyjnych2013
Podstawy programowania sterowników PLC (2)
Implementacja algorytmów sterowania osi robota
02 10 podstawy statyki zadanie 10
10 Podstawowa matematyka rekonstrukcji tomograficznych
więcej podobnych podstron