Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
1
6.
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
6.1. Wprowadzenie
Dotąd poznaliśmy dwie metody rozwiązywania układów statycznie niewyznaczalnych: metodę sił i
metodę przemieszczeń. Jednak przy bardzo skomplikowanych układach wieloprętowych, zastosowanie
którejkolwiek z tych metod byłoby uciążliwe, ze względu na konieczność rozwiązywania układu równań z
dużą liczbą niewiadomych. Ponieważ metoda sił zazwyczaj dopuszcza wiele możliwych układów
podstawowych, najłatwiejsza do “skomputeryzowania” wydaje się być metoda przemieszczeń (tutaj układ
podstawowy jest najczęściej ściśle określony). Dlatego też, coraz częściej, przy rozwiązywaniu układów
niewyznaczalnych zastosowanie mają programy komputerowe, które opierają się właśnie na tej metodzie.
Przyjrzyjmy się zatem wersji komputerowej metody przemieszczeń.
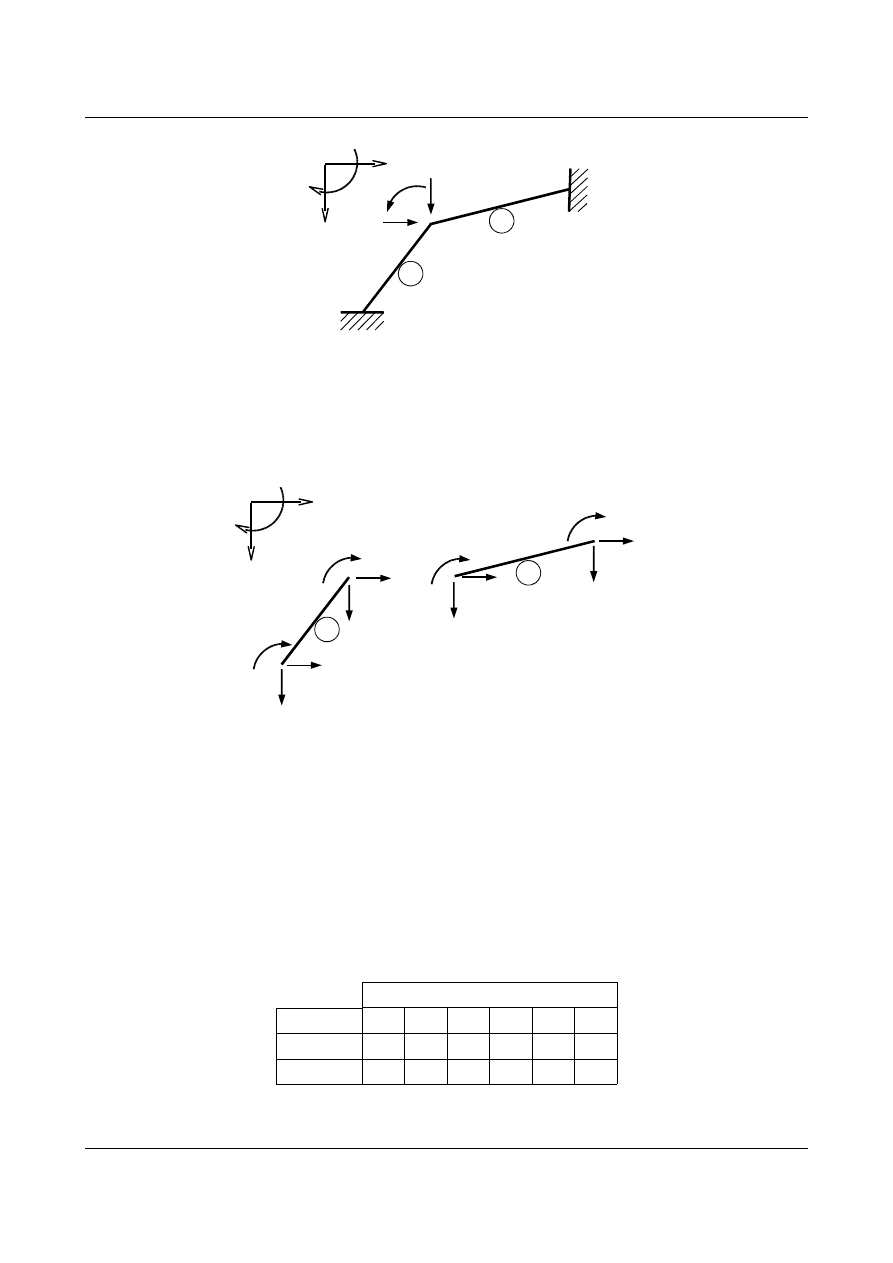
Do tej pory rozwiązując układy prętowe metodą przemieszczeń zakładaliśmy nieskracalność prętów
oraz pomijaliśmy wpływ sił normalnych. Komputerowa wersja pozwala nam uwzględnić te siły, dlatego
rezygnujemy z zasady nieskracalności prętów. Ponadto zakładamy, że każdy węzeł układu ma własne,
niezależne przemieszczenia: dwa przesuwy (pionowy, poziomy) i kąt obrotu. Zwroty przemieszczeń
zakładamy zgodnie z przyjętym na potrzeby zadania globalnym układem współrzędnych
xy.
Równie istotna jest tutaj numeracja przemieszczeń. Ze względu na trudności, które mogą powstać przy
agregacji macierzy sztywności powinna być ona ciągła w obrębie każdego węzła. Poszczególne
przemieszczenia numerowane będą w następującej kolejności: przesuw poziomy, pionowy i kąt obrotu.
y
x
q
1
q
2
q
3
q
4
q
5
q
6
q
7
q
8
q
9
Rys. 6.1. Kierunki przemieszczeń węzłów w globalnym układzie współrzędnych (x, y)
Podobnie jak w klasycznej metodzie przemieszczeń rozwiązanie uzyskujemy z układu równań kanonicznych,
którego wymiar zależy od liczby przemieszczeń
q
i
:
r
11
Z
1
r
12
Z
2
r
13
Z
3
r
19
Z
9
r
1 P
=0
r
21
Z
1
r
22
Z
2
r
23
Z
3
r
29
Z
9
r
2 P
=0
r
31
Z
1
r
32
Z
2
r
33
Z
3
r
39
Z
9
r
3 P
=0
⋮
r
91
Z
1
r
92
Z
2
r
93
Z
3
r
99
Z
9
r
9 P
=0
Współczynniki
r
ij
zależą od geometrii układu i parametrów fizycznych prętów, a nie od obciążenia
zewnętrznego. Razem tworzą one macierz charakterystyczną zwaną macierzą sztywności [
K
ij
].
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
2
[
K
ij
]
=
[
r
11
r
12
r
13
r
14
r
19
r
21
r
22
r
23
r
24
r
29
r
31
r
32
r
33
r
34
r
39
⋮
r
91
r
92
r
93
r
94
r
99
]
=
[
r
ij
]
Niewiadome, oznaczane dotąd
Z
i
to nic innego jak szukane przemieszczenia węzłów
q
i
, które tworzą macierz
niewiadomych przemieszczeń węzłowych [
q]:
[q]=
[
q
1
q
2
⋮
q
9
]
=
[
q
i
]
Współczynniki
r
iP
również będą tworzyły macierz – tak zwany wektor obciążeń [
P
ij
]:
[
P
ij
]
=−
[
r
1 P
r
2 P
⋮
r
9 P
]
=−
[
r
iP
]
Można zatem cały układ równań kanonicznych zapisać w postaci równania macierzowego:
[
K
ij
]
9
×9
⋅
[
q
i
]
9
×1
=
[
P
ij
]
9
×1
lub ogólniej dla dowolnego układu (
n to liczba niezależnych przemieszczeń węzłowych):
[
K
ij
]
n
×n
⋅
[
q
i
]
n
×1
=
[
P
ij
]
n
×1
(6.1)
Rozwiązanie równania (6.1) pozwoli nam uzyskać wynik, tak jak w zadaniu klasycznym. Aby jednak
móc przystąpić do obliczeń, należy utworzyć wszystkie potrzebne macierze. Każda z nich powstaje w wyniku
agregacji odpowiednich macierzy elementowych (zapisanych dla pojedynczych prętów).
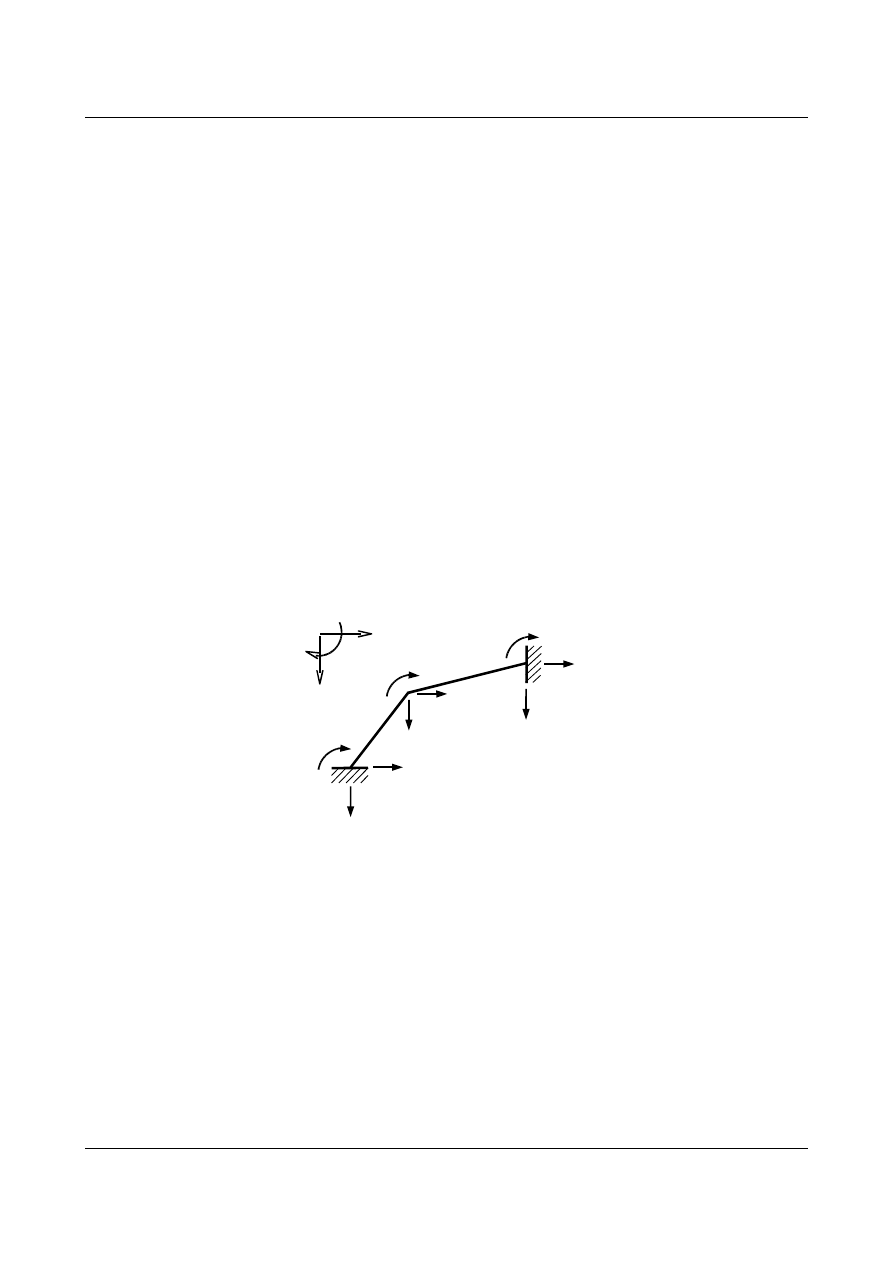
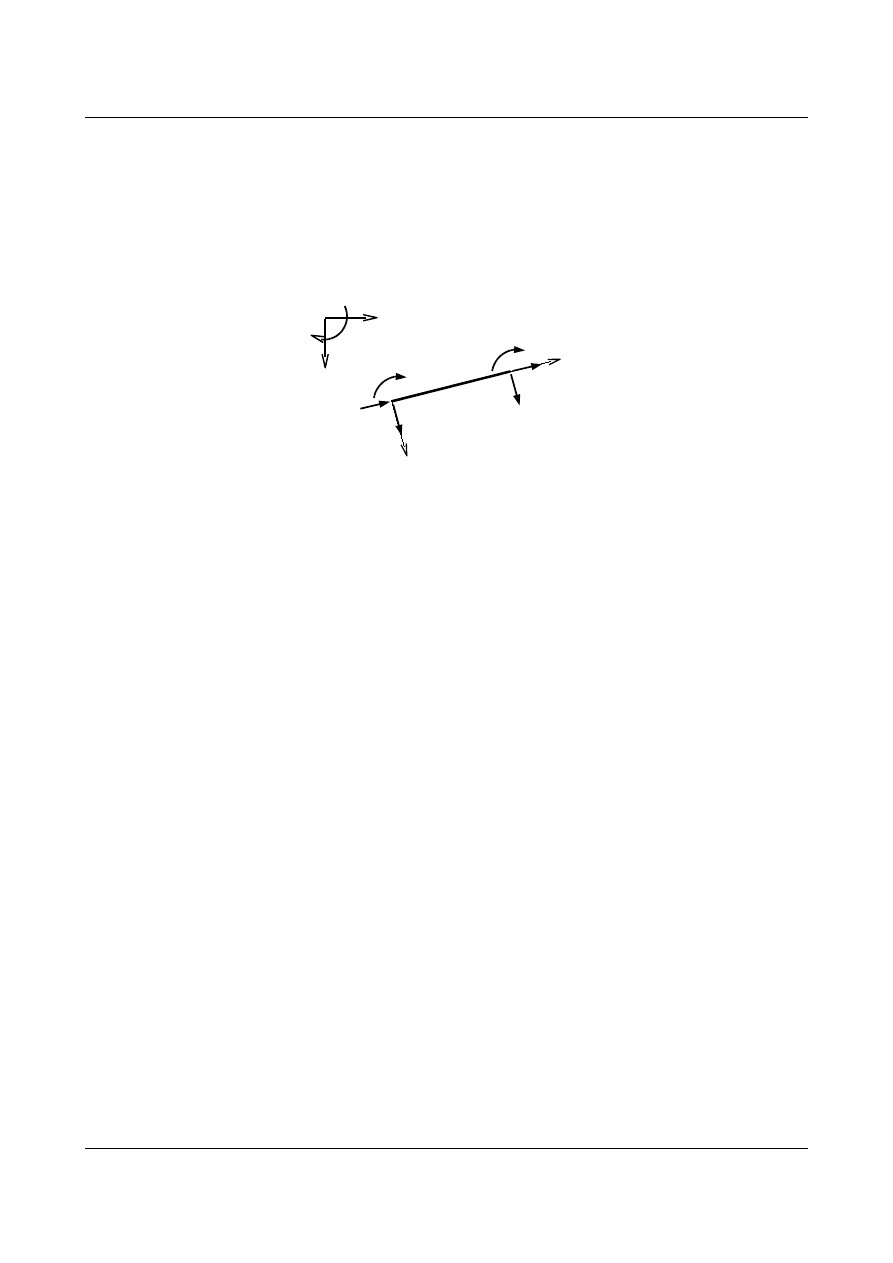
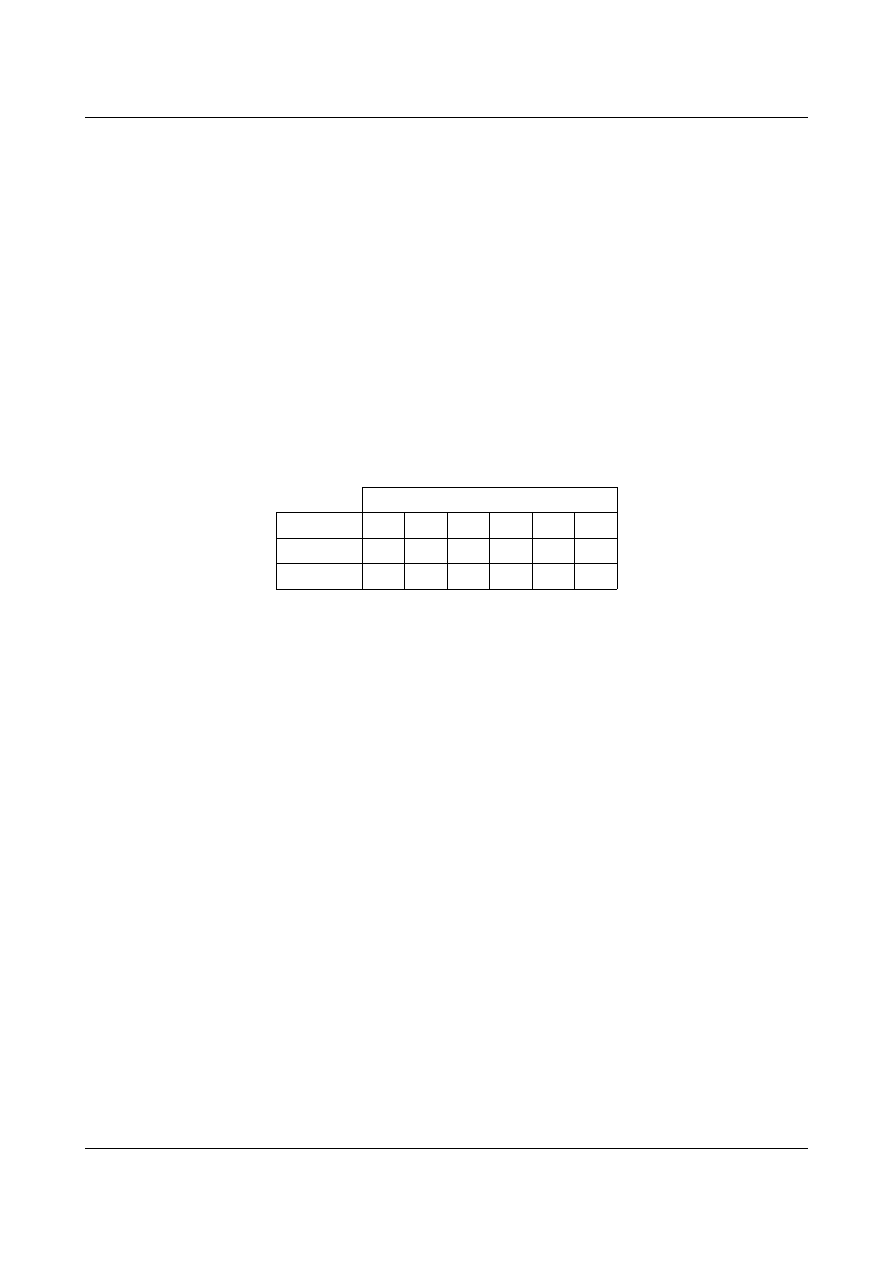
Przyjrzyjmy się zatem pojedynczemu elementowi ramy (
e). Przyjmujemy lokalny układ współrzędnych
x y , taki, że oś x pokrywa się z osią pręta, a oś y jest do niej prostopadła i tworzą układ prawoskrętny (oś
x obraca się w kierunku osi y zgodnie z ruchem wskazówek zegara). W takim układzie lokalnym
numerujemy przemieszczenia oraz reakcje. Dla pręta obustronnie utwierdzonego trzeba określić sześć reakcji
w węzłach (każdemu przemieszczeniu musi odpowiadać reakcja po tym samym kierunku).
x
y
x
y
q
2
e
q
1
e
q
3
e
q
4
e
q
5
e
q
6
e
x
y
R
2
e
R
1
e
R
3
e
R
4
e
R
5
e
R
6
e
e
i
k
Rys. 6.2. Lokalne kierunki przemieszczeń i reakcji
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater

Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
3
Warto zauważyć, że numery przemieszczeń nie są powiązane z numerami węzłów. Symbole z “~” oznaczają
wielkości w układzie lokalnym. Tak ponumerowane przemieszczenia i reakcje łatwo można zapisać w postaci
wektorów:
[
q
e
]
=
[
q
1
e
q
2
e
q
3
e
q
4
e
q
5
e
q
6
e
]
[
R
e
]
=
[
R
1
e
R
2
e
R
3
e
R
4
e
R
5
e
R
6
e
]
Reakcje, które powstaną w utwierdzeniach, to szukane wielkości (siły przekrojowe), opisywane w
metodzie przemieszczeń wzorami transformacyjnymi. Ponieważ w metodzie komputerowej dodatnie siły
przywęzłowe muszą mieć zwroty zgodne z przyjętym układem współrzędnych, a w metodzie klasycznej był
inny system znakowania, to zachodzą związki:
R
1
e
=−N
ik
R
4
e
=N
ki
R
2
e
=−T
ik
R
5
e
=T
ki
R
3
e
=M
ik
R
6
e
=M
ki
(6.2)
Stosując zasadę superpozycji można zapisać wzór na każdą z tych reakcji w układzie lokalnym. Jeśli użyjemy
zapisu macierzowego uwzględniającego wszystkie siły otrzymamy równanie równowagi elementu
(pojedynczego pręta):
[
R
e
]
6
×1
=
[
K
e
]
6
×6
⋅
[
q
e
]
6
×1
[
R
0
e
]
6
×1
(6.3)
gdzie:
[
R
e
]
- wektor sił przywęzłowych (reakcje) w lokalnym układzie współrzędnych,
[
K
e
]
- macierz charakterystyczna (sztywności) w lokalnym układzie współrzędnych,
[
q
e
]
- wektor przemieszczeń węzłów w lokalnym układzie współrzędnych,
[
R
0
e
]
- wektor sił przywęzłowych od obciążenia przęsłowego w lokalnym układzie współrzędnych.
Przekształcając równanie (6.3) możemy napisać
[
P
e
]
=
[
R
e
]
−
[
R
0
e
]
=
[
K
e
]
⋅
[
q
e
]
Analogicznie dla całego układu prętowego (układ globalny) można stwierdzić, że wektor obciążeń [
P
ij
] składa
się z wartości sił węzłowych i przęsłowych. Możemy zatem zapisać:
[
P
ij
]
=
[
P
w
]
−
[
R
0
]
(6.4)
gdzie:
[
P
w
]
- wektor zewnętrznych sił obciążających węzły konstrukcji,
[
R
0
]
- wektor sił przywęzłowych od obciążeń przęsłowych w układzie globalnym.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater

Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
4
6.2. Macierz sztywności elementu
Macierz sztywności elementu to macierz składająca się z 36 współczynników
r
ij
wyznaczonych dla
pojedynczego pręta z uwzględnieniem w obliczeniach sił normalnych. W zależności od sposobu zamocowania
pręta w konstrukcji (połączenie sztywne lub przegubowe) otrzymamy różne wartości współczynników. Dla
pręta obustronnie sztywno zamocowanego w konstrukcji mamy:
[
K
e
]
=
1
l
3
[
EAl
2
0
0
−EAl
2
0
0
0
12 EJ
6 EJl
0
−12 EJ
6 EJl
0
6 EJl
4 EJl
2
0
−6 EJl
2 EJl
2
−EAl
2
0
0
EAl
2
0
0
0
−12 EJ −6 EJl
0
12 EJ
−6 EJl
0
6 EJl
2 EJl
2
0
−6 EJl
4 EJl
2
]
(6.5)
Dysponując macierzą sztywności możemy sprawdzić czy po rozpisaniu któregoś z wierszy równania
(6.3) otrzymamy wzór transformacyjny. Spróbujmy zatem rozpisać trzeci wiersz tego równania zakładając, że
na pręcie nie ma obciążenia przęsłowego, czyli
[
R
0
e
]
=[0] . Wykorzystując macierz (6.5) w równaniu (6.3)
mamy:
0 q
1
e
6 EJ
l
2
q
2
e
4 EJ
l
q
3
e
0 q
4
e
−
6 EJ
l
2
q
5
e
2 EJ
l
q
6
e
= R
3
e
(6.6)
Na podstawie zależności (6.2) wiemy, że z równania (6.6) powinniśmy otrzymać wartość
M
ik
.
R
3
e
=M
ik
=
4 EJ
l
q
3
e
2 EJ
l
q
6
e
6 EJ
l
2
q
2
e
− q
5
e
M
ik
=
2 EJ
l
[
2 q
3
e
q
6
e
−3
q
5
e
− q
2
e
l
]
Niewiadome q
i
e
to przemieszczenia węzłów pręta. Zgodnie z oznaczeniami z rys. 6.2 w metodzie klasycznej
odpowiednie przemieszczenia mają symbole:
q
3
e
=
i
q
6
e
=
k
q
2
e
=v
i
q
5
e
=v
k
v
k
−v
i
l
=
ik
(6.7)
czyli ostatecznie otrzymaliśmy wzór transformacyjny, który jest zgodny z metodą klasyczną:
M
ik
=
2 EJ
l
[
2
i
k
−3
ik
]
Rozpiszmy teraz drugi wiersz równania (6.3). Według zależności (6.2) powinniśmy otrzymać wartość
T
ik
.
0 q
1
e
12 EJ
l
3
q
2
e
6 EJ
l
2
q
3
e
0 q
4
e
−
12 EJ
l
3
q
5
e
6 EJ
l
2
q
6
e
= R
2
e
(6.8)
−T
ik
=
6 EJ
l
2
[
q
3
e
q
6
e
−2
q
5
e
− q
2
e
l
]
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
5
T
ik
=−
6 EJ
l
2
[
q
3
e
q
6
e
−2
q
5
e
− q
2
e
l
]
Podstawiając związki (6.7) otrzymamy poprawny wzór transformacyjny:
T
ik
=−
6 EJ
l
2
[
i
k
−2
ik
]
Na koniec rozpiszmy jeszcze pierwszy wiersz równania (6.3), pamiętając, że R
1
e
=−N
ik
:
EA
l
q
1
e
0 q
2
e
0 q
3
e
−
EA
l
q
4
e
−0 q
5
e
−0 q
6
e
= R
1
e
(6.9)
−N
ik
=
EA
l
q
1
e
−
EA
l
q
4
e
−N
ik
=−
EA
l
q
4
e
− q
1
e
Ponieważ przemieszczenia q
1
e
i q
4
e
to przemieszczenia końców pręta wzdłuż jego osi, ich różnicę możemy
nazwać wydłużeniem lub skróceniem pręta:
q
4
e
− q
1
e
=l
Ostatecznie otrzymujemy wartość siły normalnej
N
ik
, która spełnia związki fizyczne:
N
ik
=
EA
l
l
W ten sam sposób można rozpisać każdy z wierszy równania (6.3), otrzymując tym samym odpowiedni wzór
transformacyjny metody przemieszczeń.
Nie zawsze jednak mamy do czynienia wyłącznie z prętami obustronnie utwierdzonymi. Jeżeli w skład
ramy wchodzą także pręty zakończone przegubem, mamy dwie możliwości postępowania. Jedna z nich polega
na rozwiązywaniu układu z założeniem, że wszystkie pręty są obustronnie utwierdzone, a przegub
uwzględniany jest dopiero przy modyfikacji układu ze względu na warunki podparcia. Druga metoda pozwala
na uwzględnienie przegubu już na początku obliczeń przez wykonanie tak zwanej redukcji statycznej.
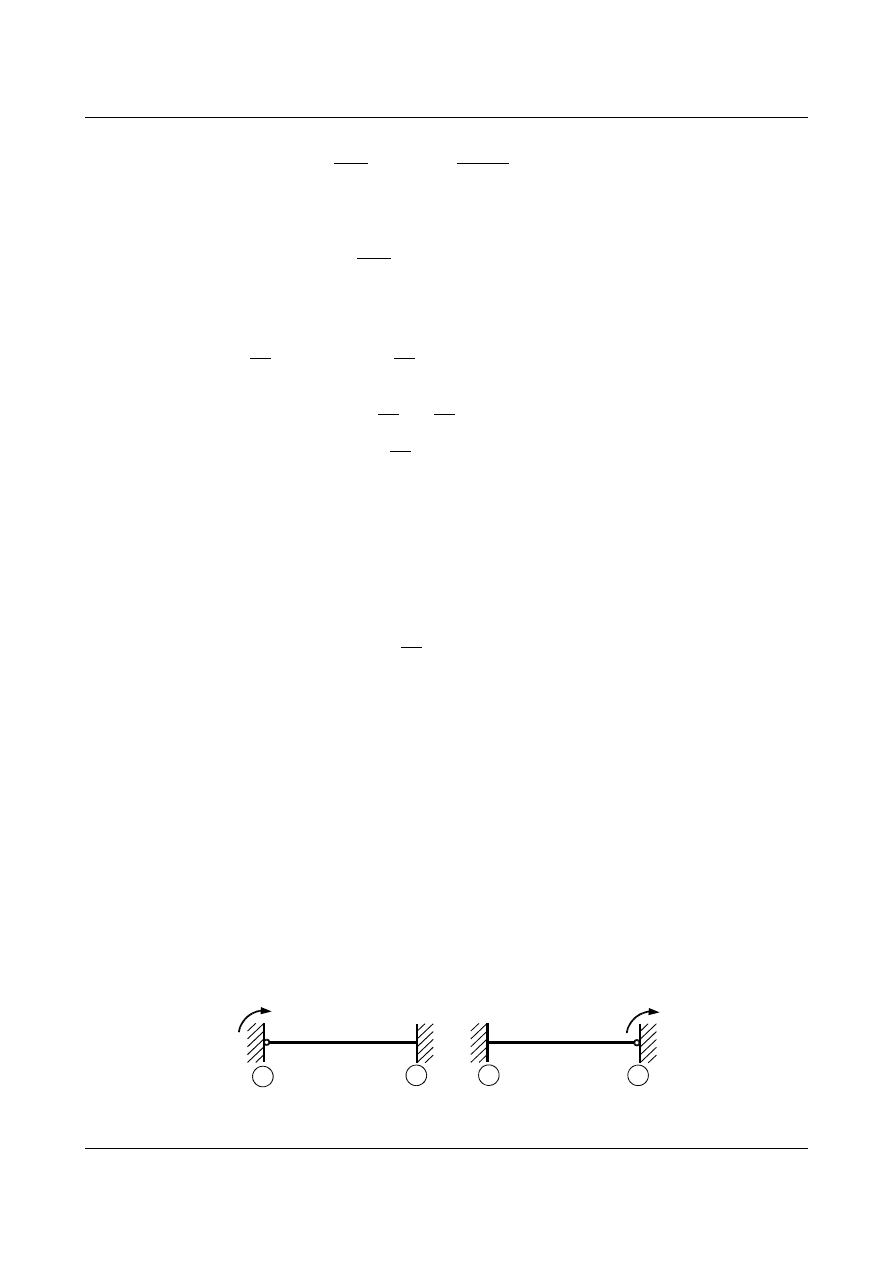
6.3. Redukcja statyczna
W przypadku prętów z przegubem znamy wartość jednej z reakcji R
i
e
. W miejscu przegubu wartość
momentu
M
ik
lub
M
ki
(w zależności czy przegub jest na lewym czy prawym końcu pręta) wynosi zero
(rys. 6.3).
i
i
k
k
φ
i
≠ 0
M
ik
= 0
φ
k
≠ 0
M
ki
= 0
e
e
Rys. 6.3. Pręty z przegubem: na lewym i prawym końcu
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
6
czyli odpowiednio:
R
3
e
=0 lub
R
6
e
=0
Należy jednak pamiętać, że zerowa reakcja nie oznacza zerowego przemieszczenia po danym kierunku:
dla
R
3
e
=0
q
3
e
≠0
dla
R
6
e
=0
q
6
e
≠0
Możemy dokonać redukcji macierzy sztywności elementu. Dla pręta z przegubem z lewej strony
R
3
e
=0
przyrównujemy do zera trzeci wiersz z układu (6.3)
6 EJ l q
2
e
4 EJ l
2
q
3
e
−6 EJ l q
5
e
2 EJ l
2
q
6
e
=0
Z tego warunku wynika wartość kąta obrotu w przegubie
q
3
e
=−
1
2 l
3 q
2
e
−3 q
5
e
l q
6
e
Po podstawieniu powyższego wyrażenia do równań równowagi (6.1) porządkujemy zapis i otrzymujemy nowe
związki. Przykładowo drugie równanie będzie miało postać:
R
2
e
=
1
l
3
[
12 EJ q
2
e
6 EJ l⋅
1
2 l
−3 q
2
e
3 q
5
e
−l q
6
e
−12 EJ q
5
e
6 EJ l q
6
e
]
R
2
e
=
1
l
3
[
3 EJ q
2
e
−3 EJ q
5
e
3 EJ l q
6
e
]
Zapisując wszystkie związki w formie macierzowej w trzeciej kolumnie otrzymamy same zera (żadna z
wielkości nie zależy od q
3
e
). Macierz sztywności musi być symetryczna wobec tego w trzecim wierszu także
zapisujemy zera. Inaczej mówiąc trzeci warunek nie wnosi nam nic do zadania i można go pominąć.
[
K
e
]
=
1
l
3
[
EAl
2
0
0
−EAl
2
0
0
0
3 EJ
0
0
−3 EJ
3 EJl
0
0
0
0
0
0
−EAl
2
0
0
EAl
2
0
0
0
−3 EJ 0
0
3 EJ
−3 EJl
0
3 EJl
0
0
−3 EJl
3 EJl
2
]
(6.10)
Postępując podobnie w przypadku pręta z przegubem z prawej strony uzyskamy macierz:
[
K
e
]
=
1
l
3
[
EAl
2
0
0
−EAl
2
0
0
0
3 EJ
3 EJl
0
−3 EJ 0
0
3 EJl
3 EJl
2
0
−3 EJl 0
−EAl
2
0
0
EAl
2
0
0
0
−3 EJ −3 EJl
0
3 EJ
0
0
0
0
0
0
0
]
(6.11)
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
7
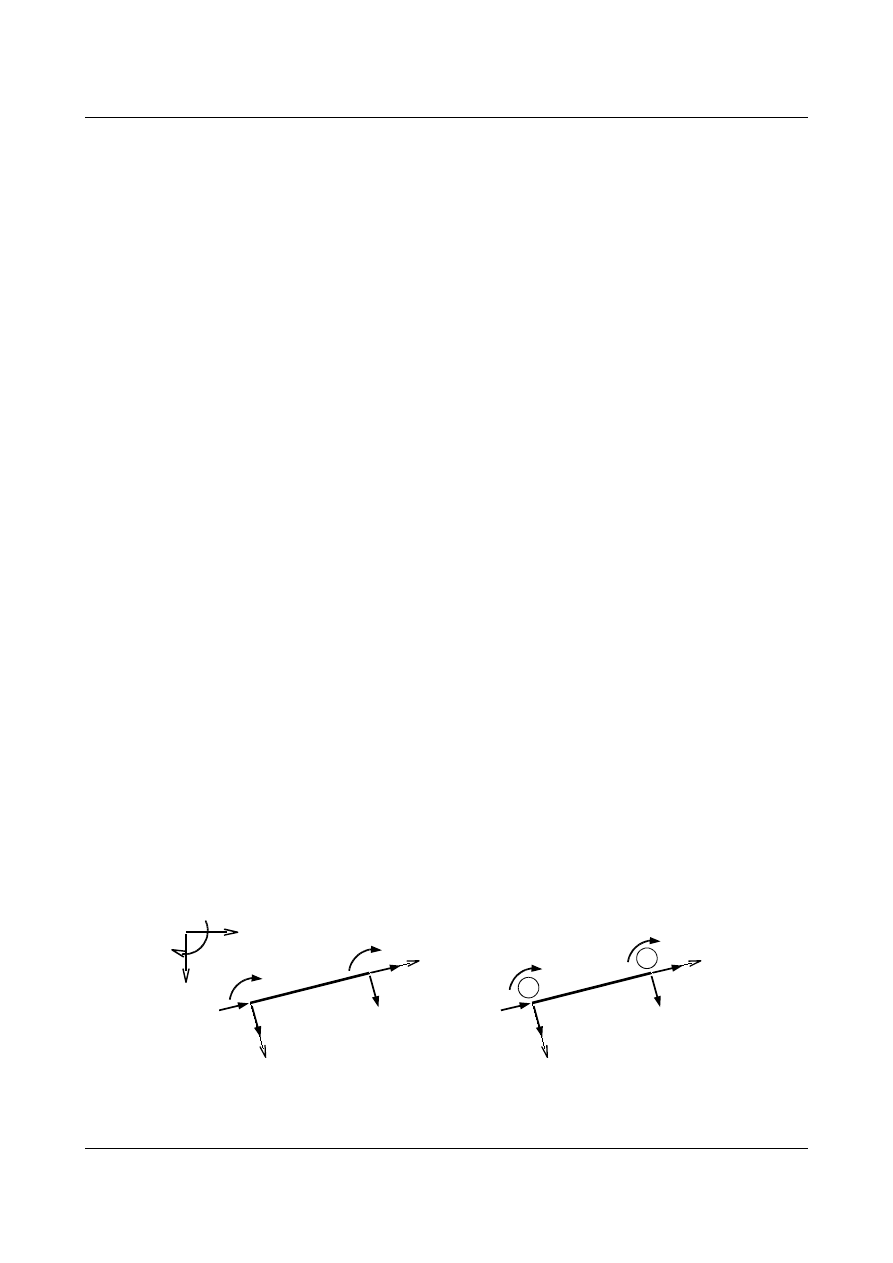
6.4. Wektor sił przywęzłowych
Na wektor sił przywęzłowych od obciążenia przęsłowego składają się reakcje powstałe w podporach
(utwierdzeniach lub przegubach) pojedynczego pręta od sił zewnętrznych działających na jego długości. Są
one zgodne z założonymi kierunkami przemieszczeń w lokalnym układzie współrzędnych (rys. 6.2) i
odpowiednio ponumerowane. Mogą być wywołane obciążeniem zewnętrznym, temperaturą lub osiadaniem
podpór.
x
y
x
y
R
02
e
R
01
e
R
03
e
R
04
e
R
05
e
R
06
e
e
Rys. 6.4. Lokalne kierunki reakcji od obciążeń przęsłowych
Tak ponumerowane reakcje możemy zapisać w postaci wektora sił przywęzłowych:
[
R
0
e
]
=
[
R
01
e
R
02
e
R
03
e
R
04
e
R
05
e
R
06
e
]
Jeżeli na pręt nie działa obciążenie przęsłowe, temperatura, ani osiadania, to wektor obciążeń jest
wektorem zerowym.
[
R
0
e
]
=[0]
6.4.1. Działanie sił zewnętrznych
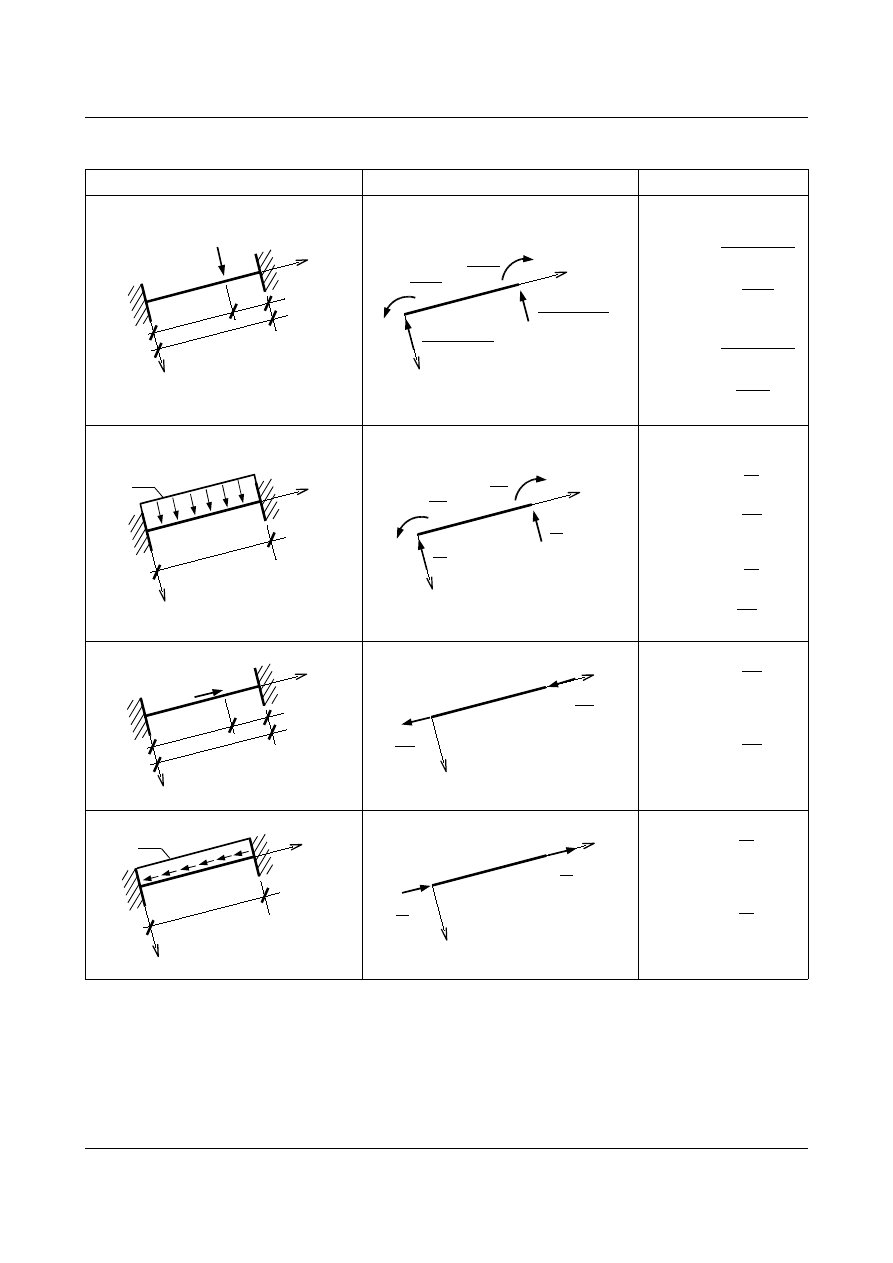
Jeżeli obciążeniem pręta są wyłącznie siły skupione lub ciągłe, to wektor sił przywęzłowych będzie
składał się z reakcji pochodzących od tych obciążeń. Jeżeli na pręt działa więcej niż jedno obciążenie, wtedy
możemy zastosować zasadę superpozycji a wektor sił będzie się składał z sum odpowiednich reakcji od
poszczególnych obciążeń.
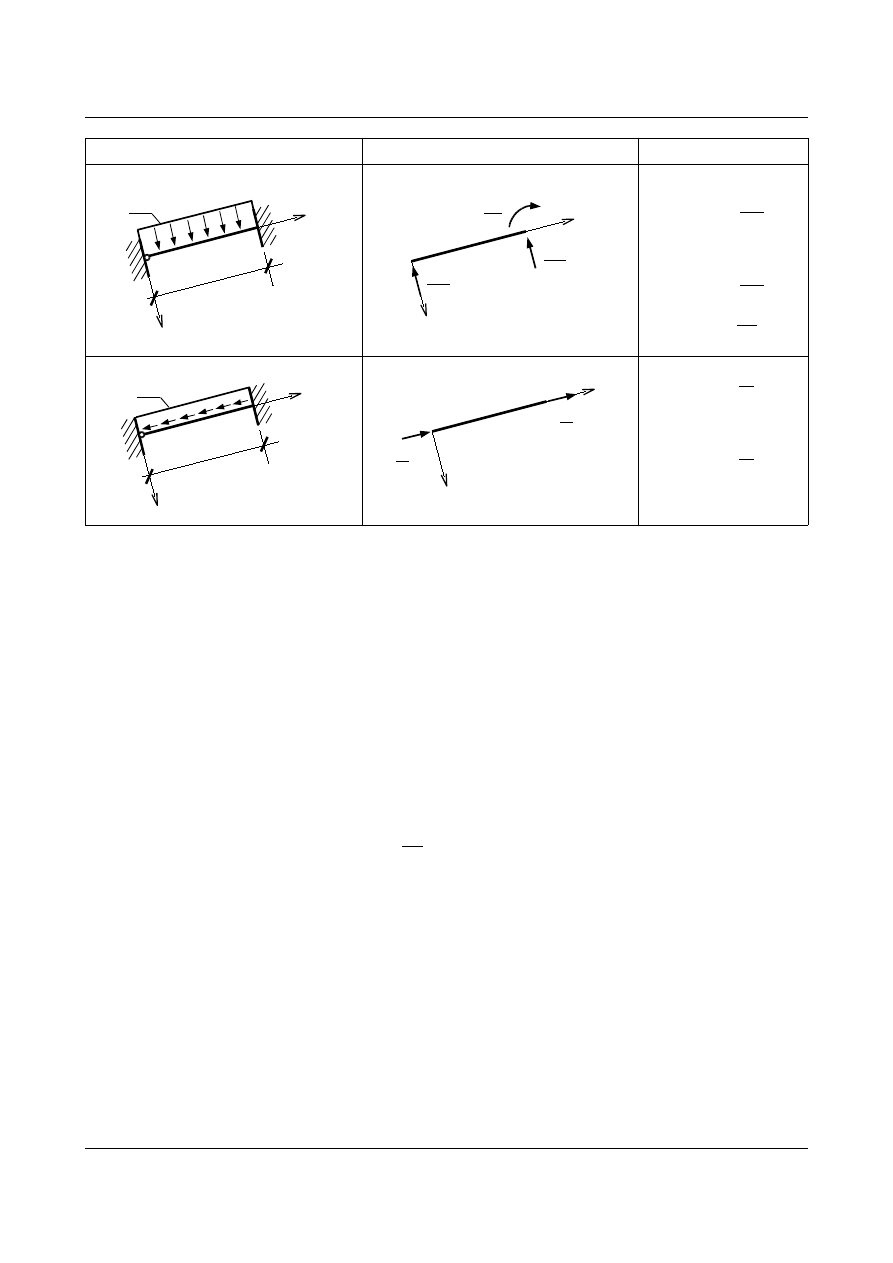
W przypadku pręta obustronnie utwierdzonego lub z przegubem z jednej strony wyznaczenie tych
reakcji wymagałoby rozwiązania układu statycznie niewyznaczalnego, dlatego też wartości tych reakcji
najczęściej odczytujemy z tablic (tabela 1.2). Przypomnijmy niektóre z nich zwracając uwagę na zwroty
reakcji.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
8
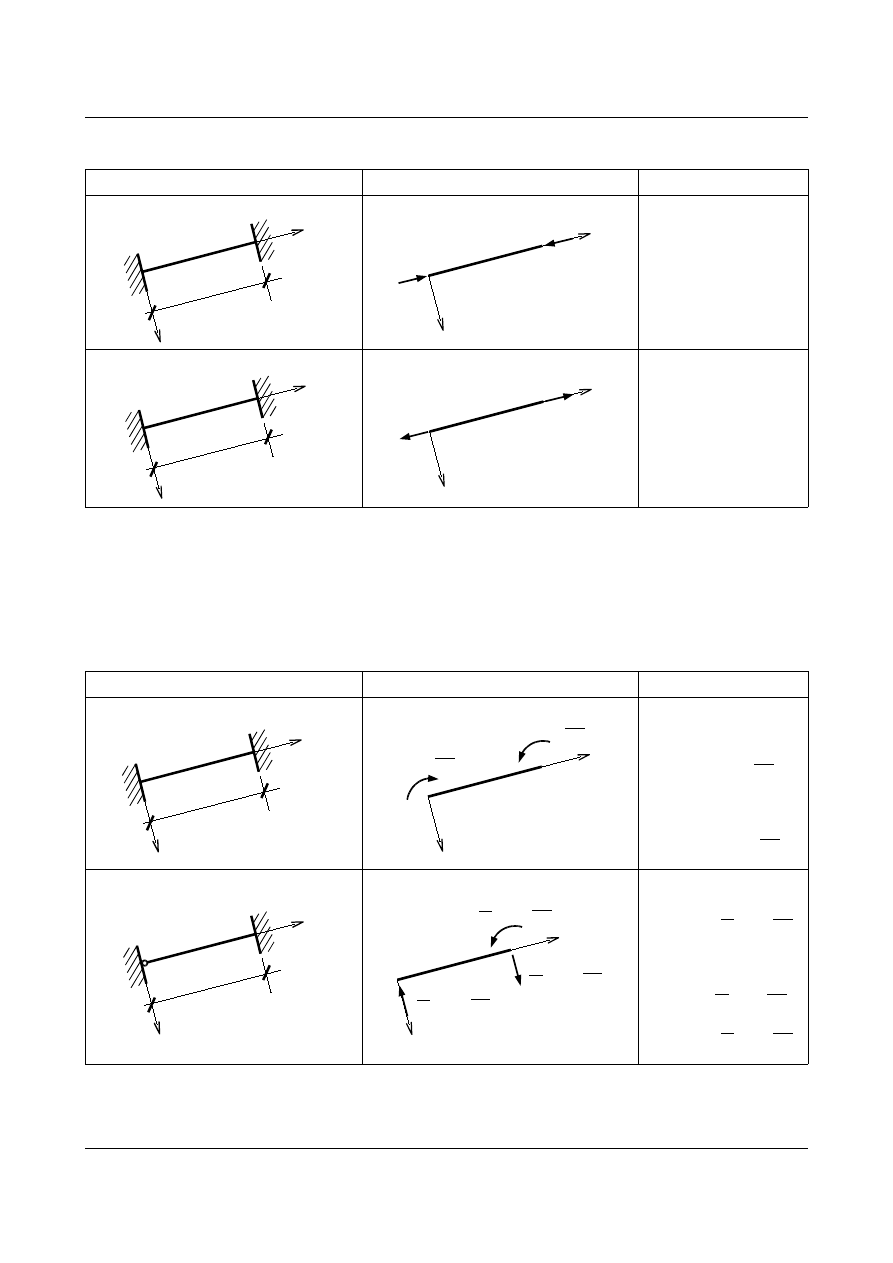
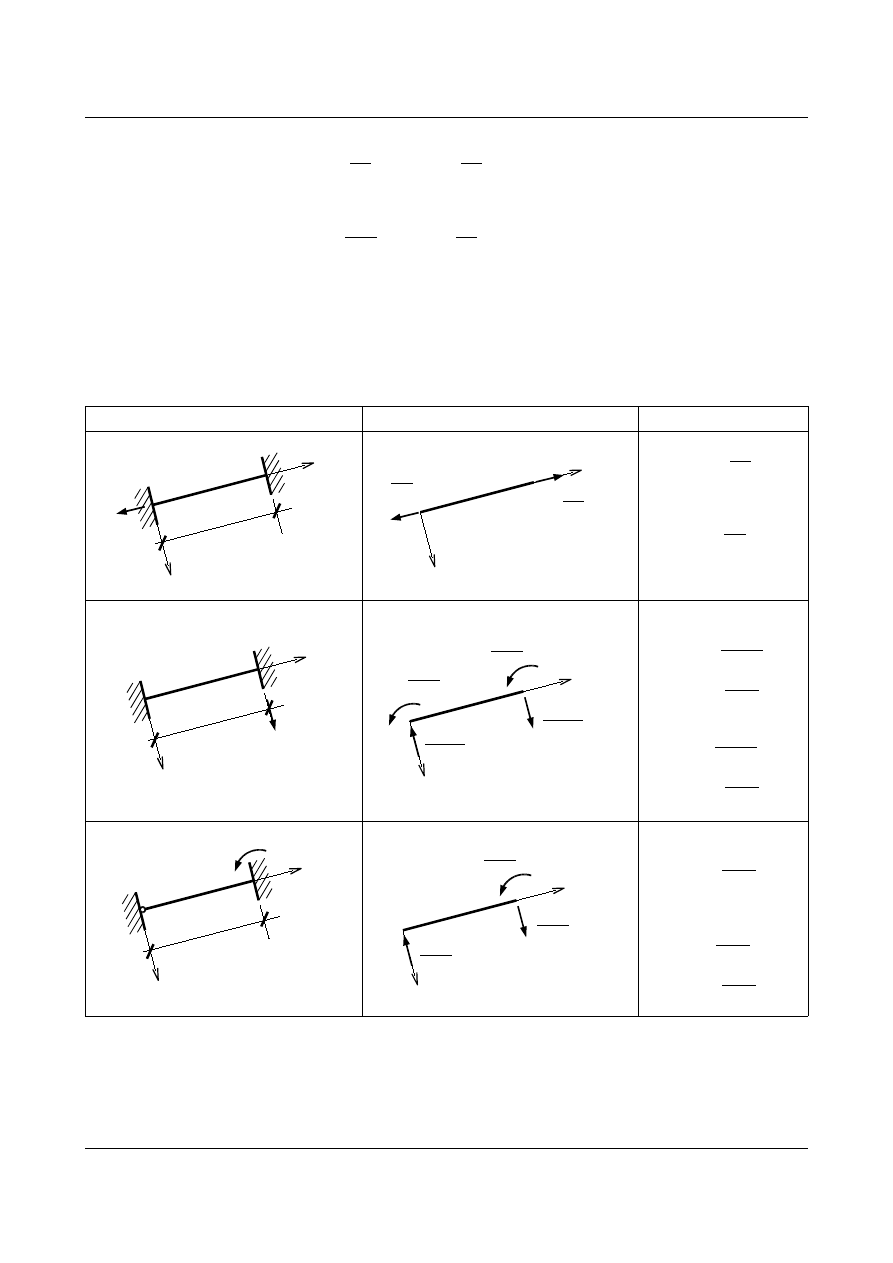
Tabela 6.1. Wartości reakcji R
0
e
od obciążeń przęsłowych
Schemat belki
Wartości reakcji
Wektor sił przywęzłowych
x
y
P
a
l
b
x
y
Pb
2
l2a
l
3
Pab
2
l
2
Pa
2
b
l
2
Pa
2
l2b
l
3
[
R
0
e
]
=
[
0
−
Pb
2
l2 a
l
3
−
Pab
2
l
2
0
−
Pa
2
l2 b
l
3
Pa
2
b
l
2
]
x
y
q
l
x
y
ql
2
ql
2
12
ql
2
12
ql
2
[
R
0
e
]
=
[
0
−
ql
2
−
ql
2
12
0
−
ql
2
ql
2
12
]
x
y
P
a
l
b
x
y
Pb
l
Pa
l
[
R
0
e
]
=
[
−
Pb
l
0
0
−
Pa
l
0
0
]
x
y
q
l
x
y
ql
2
ql
2
[
R
0
e
]
=
[
ql
2
0
0
ql
2
0
0
]
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
9
Schemat belki
Wartości reakcji
Wektor sił przywęzłowych
x
y
q
l
x
y
3ql
8
ql
2
8
5ql
8
[
R
0
e
]
=
[
0
−
3 ql
8
0
0
−
5 ql
8
ql
2
8
]
x
y
q
l
x
y
ql
2
ql
2
[
R
0
e
]
=
[
ql
2
0
0
ql
2
0
0
]
6.4.2. Działanie obciążenia termicznego
Wpływ temperatury rozpatrzmy w dwóch osobnych etapach: najpierw przeanalizujemy działanie
temperatury
t
0
rozłożonej równomiernie na wysokości przekroju, a następnie wpływ nierównomiernego
ogrzania
Δt.
Jeżeli na pręt działają oba rodzaje obciążenia termicznego, na wektor sił przywęzłowych składają się
sumy odpowiednich składników wektorów pochodzących od obu typów obciążenia.
W przypadku działania temperatury równomiernie rozłożonej
t
0
nastąpi wydłużenie lub skrócenie pręta
(w pręcie wystąpią jedynie siły normalne). Trzeba pamiętać, że ogrzanie pręta spowoduje powstanie siły
normalnej ściskającej, natomiast ochłodzenie wywoła siłę rozciągającą. Dzieje się tak ponieważ ogrzany pręt
chce się wydłużyć a jest zablokowany podporami i nie może się odkształcić. Siła osiowa będzie miała wartość:
N
=±
EA
l
l
(6.12)
W wyniku działania temperatury
t
0
, wydłużenie lub skrócenie pręta opisujemy wzorem:
l=
t
l t
0
(6.13)
Po podstawieniu zależności (6.13) do wzoru (6.12) otrzymujemy wartość siły normalnej, wywołanej
działaniem równomiernego ogrzania pręta:
N
=±EA
t
t
0
Otrzymane wyniki zestawiono w tabeli 6.2.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
10
Tabela 6.2. Wartości reakcji R
0
e
od równomiernego ogrzania
Schemat belki
Wartości reakcji
Wektor sił przywęzłowych
x
y
l
t
0
> 0
EA
x
y
N < 0
EA α
t
t
0
EA α
t
t
0
[
R
0
e
]
=
[
EA
t
t
0
0
0
−EA
t
t
0
0
0
]
x
y
l
t
0
< 0
EA
x
y
N > 0
EA α
t
t
0
EA α
t
t
0
[
R
0
e
]
=
[
−EA
t
t
0
0
0
EA
t
t
0
0
0
]
W wyniku działania nierównomiernie rozłożonej temperatury
Δt nastąpi zginanie pręta (nie wystąpią
natomiast siły normalne). Należy pamiętać, że w tym przypadku, powstały moment rozciąga włókna
chłodniejsze. Jego wartość zależeć będzie od sposobu zamocowania pręta (tabela 6.3). Interpretacja jest
podobna jak poprzednio, włókna zimniejsze chcą się skrócić, a przytrzymane przez podpory nie mogą. Są więc
rozciągane.
Tabela 6.3. Wartości reakcji R
0
e
od nierównomiernego ogrzania
Schemat belki
Wartości reakcji
Wektor sił przywęzłowych
x
y
l
t
g
> t
d
t
g
t
d
EJ, h
x
y
t
h
EJ α
t
Δ
t
h
EJ α
t
Δ
[
R
0
e
]
=
[
0
0
EJ
t
t
h
0
0
−EJ
t
t
h
]
x
y
l
t
g
> t
d
t
g
t
d
EJ, h
x
y
EJ α
t
3
2
t
hl
Δ
EJ α
t
3
2
t
h
Δ
EJ α
t
3
2
t
hl
Δ
[
R
0
e
]
=
[
0
−
3
2
EJ
t
t
h l
0
0
3
2
EJ
t
t
h l
−
3
2
EJ
t
t
h
]
W przypadku pręta obustronnie utwierdzonego działające od temperatury momenty równoważą się nie
wywołując reakcji. Natomiast w pręcie z przegubem wystąpią też siły poprzeczne.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
11
6.4.3. Wpływ osiadania podpór
Jeżeli obciążeniem są osiadania podpór, to możemy zapisać wektor sił przywęzłowych tylko dla tych
prętów ramy, których węzły doznają osiadań. Gdy pręt nie łączy się z osiadającymi podporami, to lokalny
wektor sił przywęzłowych jest wektorem zerowym:
[
R
0
e
]
=[0]
W układzie lokalnym pręta można zapisać składowe wektora siły jedynie równoległe bądź prostopadłe
do osi pręta. Jeżeli na pręt działa osiadanie liniowe pod kątem do jego osi trzeba je rozłożyć na składowe:
równoległą i prostopadłą do osi pręta. Osiadania znakujemy i numerujemy tak samo jak przemieszczenia i
reakcje węzłowe (rys. 6.2).
Do zbudowania wektora sił przywęzłowych dla pręta obciążonego osiadaniami wystarczy znajomość
macierzy sztywności danego pręta. Do tej pory rozpisywaliśmy równanie równowagi elementu (6.3) w celu
uzyskania wzorów transformacyjnych. Jeżeli osiadania potraktujemy jako znane przemieszczenia i
przemnożymy je przez macierz sztywności to otrzymamy siły przywęzłowe, które są skutkiem działania tych
osiadań.
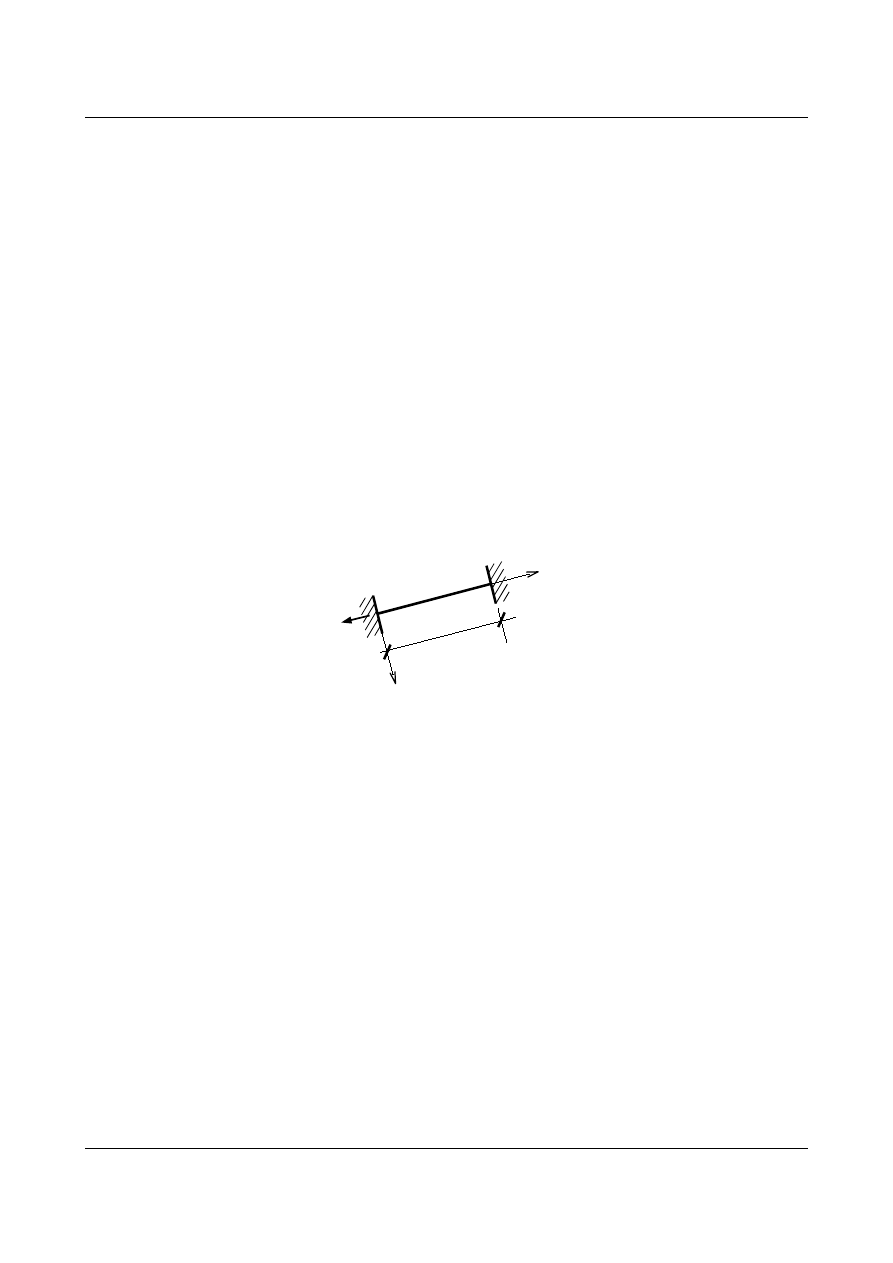
Przyjrzyjmy się zatem obustronnie utwierdzonemu prętowi, którego węzeł doznaje przemieszczenia (osiadania
podpory) równoległego do jego osi (rys. 6.5).
x
y
Δx
l
EA
Rys. 6.5. Pręt obustronnie utwierdzony obciążony osiadaniem
Osiadanie
Δx działa po kierunku pierwszego przemieszczenia, ale z przeciwnym zwrotem. W tym przypadku,
na wektor sił przywęzłowych składać się będzie pierwsza kolumna macierzy sztywności dla pręta obustronnie
utwierdzonego (6.5), pomnożona przez wartość zadanego osiadania z ujemnym znakiem. Wobec tego wektor
znanych przemieszczeń węzłowych ma postać
[
0
e
]
=
[
− x
0
0
0
0
0
]
Mnożenie macierzowe
[
R
0
e
]
=
[
K
e
]
⋅
[
e
]
sprowadza się do skalarnego przemnożenia pierwszej kolumny macierzy (6.5) przez wartość osiadania:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
12
[
R
0
e
]
=
[
EA
l
0
0
−EA
l
0
0
]
⋅− x=
[
−
EA
l
x
0
0
EA
l
x
0
0
]
W tabeli 6.4 podano kilka przykładów wyznaczania wektora sił przywęzłowych od przemieszczeń (osiadań)
węzłów.
Tabela 6.4. Wartości reakcji
R
0
e
od osiadań podpór
Schemat belki
Wartości reakcji
Wektor sił przywęzłowych
x
y
Δx
l
EA
x
y
EA
l
EA
l
Δx
Δx
[
R
0
e
]
=
[
−
EA
l
x
0
0
EA
l
x
0
0
]
x
y
l
Δy
EJ
x
y
12 EJ
l
3
12 EJ
l
3
6 EJ
l
2
6 EJ
l
2
Δy
Δy
Δy
Δy
[
R
0
e
]
=
[
0
−
12 EJ
l
3
y
−
6 EJ
l
2
y
0
12 EJ
l
3
y
−
6 EJ
l
2
y
]
x
y
l
EJ
Δφ
x
y
3 EJ
l
2
3 EJ
l
3 EJ
l
2
Δφ
Δφ
Δφ
[
R
0
e
]
=
[
0
−
3 EJ
l
2
0
0
3 EJ
l
2
−
3 EJ
l
]
Do tej pory zapisywaliśmy macierze sztywności i wektory sił przywęzłowych dla pojedynczych prętów,
w ich lokalnych układach współrzędnych. Jednak w celu rozwiązania zadania (ramy wieloprętowej)
korzystamy z równania równowagi zapisanego dla całego układu (6.1). Zawiera ono macierz sztywności,
wektor przemieszczeń oraz wektor obciążeń stworzony dla wszystkich prętów. Do utworzenia potrzebnych
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
13
macierzy dokonuje się agregacji poszczególnych macierzy jednostkowych (wyznaczonych dla pojedynczych
prętów). Aby jednak można było zagregować macierze sztywności zapisane dla pojedynczych prętów, muszą
one dotyczyć jednego, globalnego układu współrzędnych. W tym celu przeprowadza się transformację
macierzy zapisanych w układach lokalnych do układu globalnego.
6.5. Transformacja układu współrzędnych
Aby składowe macierzy sztywności i wektora sił przywęzłowych, zapisane w lokalnym układzie
współrzędnych, odnosiły się do przyjętego dla całej konstrukcji, globalnego układu współrzędnych, należy je
odpowiednio przetransformować. W tym celu posłużymy się macierzą transformacji [
T]:
[
T
]
=
[
cos
sin
0
0
0
0
−sin cos 0
0
0
0
0
0
1
0
0
0
0
0
0
cos
sin
0
0
0
0
−sin cos 0
0
0
0
0
0
1
]
(6.14)
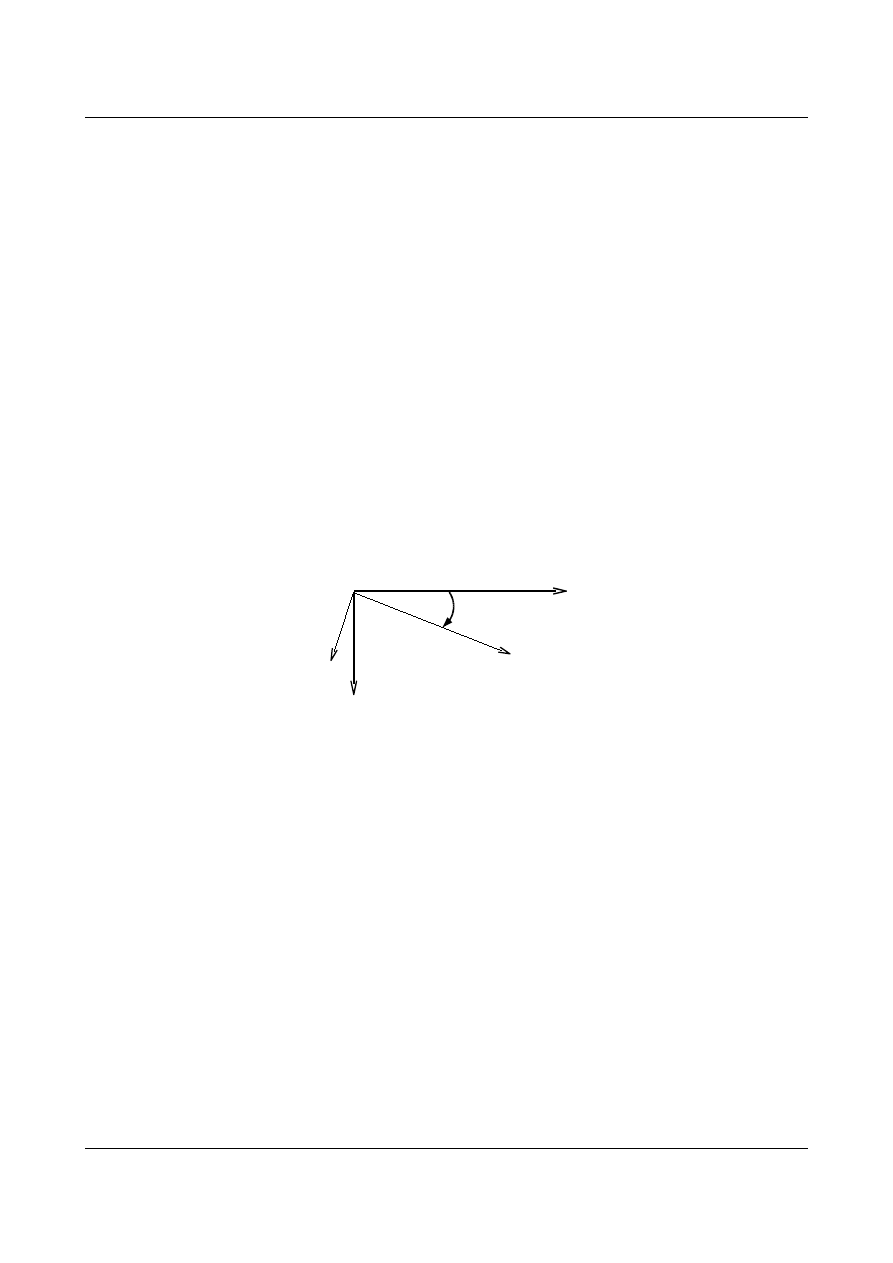
gdzie kąt
α jest kątem mierzonym od osi x układu globalnego do osi x układu lokalnego (rys. 6.6). Za dodatni
uznajemy kąt
α skierowany zgodnie z ruchem wskazówek zegara.
x
y
x
y
α
Rys. 6.6. Globalny i lokalny układ współrzędnych
Prawo transformacji wektora niewiadomych opisujemy wzorem:
[
q
e
]
=
[
T
]
T
[
q
e
]
[
q
e
]
=[T ]
[
q
e
]
(6.15)
Podobnie wygląda transformacja wektora sił przywęzłowych:
[
R
0
e
]
=
[
T
]
T
[
R
0
e
]
(6.16)
W przypadku dwuwymiarowej macierzy sztywności posłużymy się wzorem:
[
K
e
]
=
[
T
]
T
[
K
e
]
[T ]
(6.17)
Jeżeli lokalny układ współrzędnych będzie się pokrywał z układem globalnym, zarówno macierz
sztywności, jak i wektor sił przywęzłowych po transformacji nie powinny się zmienić:
dla α = 0
[
R
0
e
]
=
[
R
0
e
]
[
K
e
]
=
[
K
e
]
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
14
Transformacja pozwala nam uzyskać składowe macierzy sztywności i wektora sił przywęzłowych,
odniesione do globalnego układu współrzędnych. Składowe wektora sił będą wyrażały teraz reakcje
zorientowane zgodnie z osiami globalnego układu współrzędnych (rys. 6.7).
R
03
(e)
x
y
R
01
(e)
R
02
(e)
R
04
(e)
R
05
(e)
R
06
(e)
e
Rys. 6.7. Kierunki reakcji od obciążeń przęsłowych w globalnym układzie współrzędnych (po transformacji)
Jak widać na rys. 6.7, reakcje R
03
e
i R
06
e
nie zmieniły kierunku. Ponieważ momenty przywęzłowe nie
zależą od przyjętego układu współrzędnych, nie zmieniła się także ich wartość:
R
03
e
= R
03
e
R
06
e
= R
06
e
Dysponując macierzami zapisanymi w jednolitym układzie współrzędnych możemy dokonać ich agregacji
(złożenia).
6.6. Agregacja macierzy
Agregacja macierzy polega na odpowiednim ułożeniu poszczególnych składników macierzy zapisanych
dla kolejnych elementów w odpowiadające im pola w macierzy całkowitej (dla całej konstrukcji). Agregować
można składowe wielu macierzy elementowych, pod warunkiem, że wszystkie dotyczą jednego, globalnego
układu współrzędnych.
Aby ułatwić sobie odnajdywanie miejsc właściwego położenia poszczególnych elementów, skorzystamy
z tak zwanej tabeli alokacji (powiązań). Nie ma uniwersalnej tabeli alokacji. Trzeba sporządzić ją dla każdego
zadania oddzielnie, ale korzystamy z niej zarówno do agregacji macierzy sztywności, jak i wektora obciążeń.
Tworzeniu takiej tabeli przyjrzymy się agregując wektor obciążeń.
6.6.1. Agregacja wektora obciążeń
Analizie poddamy ramę obciążoną siłami węzłowymi, w której obciążenie przęsłowe może być dowolne
(zakładamy zerowe). Istotne jest, aby siły przyłożone w węźle pokrywały się z globalnym układem
współrzędnych. Gdyby jednak działały w dowolnym kierunku, trzeba by je rzutować i w każdym węźle
wyrazić jako składowe równoległe do osi globalnego układu współrzędnych.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
15
x
y
P
y
P
x
M
1
2
Rys. 6.8. Przykładowa rama obciążona w węźle
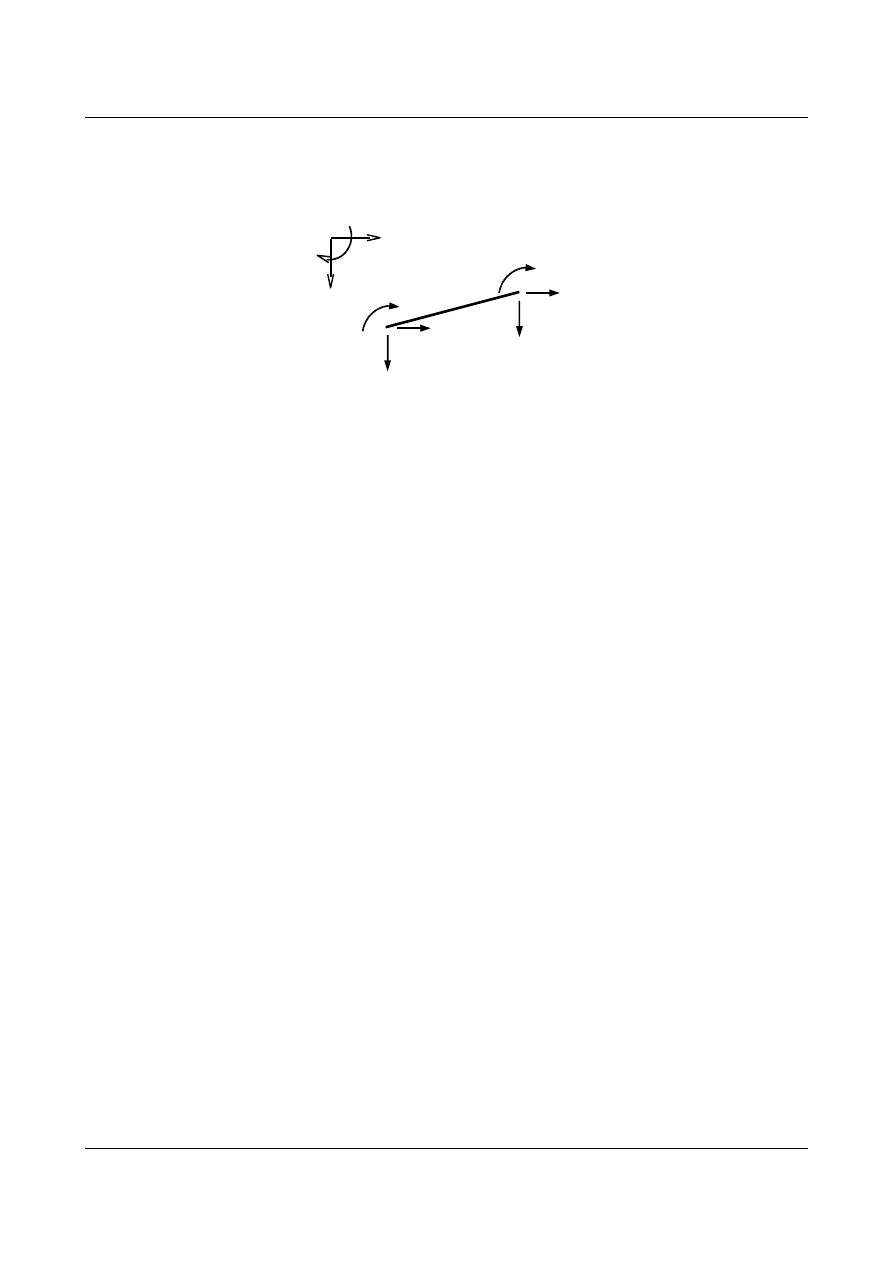
Ponieważ umiemy znaleźć i przetransformować wartości reakcji przywęzłowych od obciążeń przęsłowych
występujące na pojedynczych prętach ramy, narysujmy je dla każdego pręta (rys. 6.9) w odniesieniu do
globalnego układu współrzędnych (po transformacji).
x
y
1
2
R
01
(1)
R
02
(1)
R
03
(1)
R
04
(1)
R
05
(1)
R
06
(1)
R
01
(2)
R
02
(2)
R
03
(2)
R
04
(2)
R
05
(2)
R
06
(2)
Rys. 6.9. Reakcje przywęzłowe w globalnym układzie współrzędnych
Pamiętając, że globalne kierunki reakcji pokrywają się z globalnymi kierunkami przemieszczeń (rys. 6.1),
możemy stwierdzić, że na przykład kierunek reakcji
R
01
(1)
pokrywa się z kierunkiem pierwszego
przemieszczenia
q
1
, a kierunek reakcji
R
05
(1)
pokrywa się z kierunkiem piątego przemieszczenia
q
5
. Podobne
zależności można zapisać dla pręta drugiego, np.: kierunek reakcji
R
01
(2)
pokrywa się z kierunkiem czwartego
przemieszczenia
q
4
. Możemy zatem zestawić te wiadomości w tabeli alokacji (tabela 6.5). w pierwszym
wierszu cyfry od 1 do 6 oznaczają sześć kolejnych kierunków w dowolnym elemencie, zgodnych z układem
globalnym (wskaźnik
i w symbolu R
0i
(2)
). W kolejnych wierszach podano jakim kierunkom globalnych
przemieszczeń (rys. 6.1) odpowiadają one w poszczególnych elementach.
Tabela 6.5. Tabela powiązań dla elementów wektora obciążeń
numer reakcji R
0
nr pręta
1
2
3
4
5
6
1
1
2
3
4
5
6
2
4
5
6
7
8
9
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater

Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
16
Dzięki tej tabeli wiemy, w którym wierszu macierzy globalnej umieścić wielkość wyznaczoną dla
elementu. Wyrazy wektora obciążeń przywęzłowych są elementami jednoindeksowymi (
R
0k
(e)
), dlatego do
określenia ich miejsca w wektorze obciążeń wystarczy zamiana
k - tego indeksu na nowy, zgodnie z tabelą
alokacji. I tak na przykład, reakcja
R
06
(2)
z drugiego pręta zajmie miejsce w dziewiątym wierszu w wektorze
obciążeń, a reakcja
R
02
(2)
zajmie miejsce w wierszu piątym.
Teraz, gdy wiemy już, które wiersze odpowiadają którym reakcjom na pojedynczych prętach, możemy
przystąpić do agregacji wektora obciążeń. Zgodnie ze wzorem (6.4) na wektor obciążeń [
P
ij
] składa się wektor
sił węzłowych i wektor sił przywęzłowych.
Numery wierszy, w których znajdą się składowe wektora sił przywęzłowych odczytujemy, jak to
wyjaśniono powyżej, z tabeli alokacji (powiązań). Jak widać, w niektórych wierszach znajdą się po dwa
składniki, np. na czwarty wiersz składać się będą reakcje
R
04
(1)
z pierwszego pręta i
R
01
(2)
z drugiego pręta.
Składowe wektora sił węzłowych to wartości sił działających w węzłach konstrukcji umieszczone w
odpowiednich wierszach związanych z kierunkiem ich działania. W naszym przykładzie występują trzy siły
węzłowe:
P
x
,
P
y
, i
M. Siła P
x
działa po kierunku czwartego przemieszczenia (reakcji), siła
P
y
działa po
kierunku przemieszczenia piątego, a moment
M po kierunku przemieszczenia szóstego. I takie właśnie będą
ich miejsca w wektorze sił węzłowych. Znaki, z jakimi wpiszemy wartości sił węzłowych, przyjmujemy
zgodnie z globalnym układem współrzędnych.
[ P
ij
]=
[
0
0
0
P
x
P
y
M
0
0
0
]
−
[
R
01
1
R
02
1
R
03
1
R
04
1
R
01
2
R
05
1
R
02
2
R
06
1
R
03
2
R
04
2
R
05
2
R
06
2
]
=
[
−R
01
1
−R
02
1
−R
03
1
P
x
−R
04
1
−R
01
2
P
y
−R
05
1
−R
02
2
M
−R
06
1
−R
03
2
−R
04
2
−R
05
2
−R
06
2
]
=
[
R
1
R
2
R
3
R
4
R
5
R
6
R
7
R
8
R
9
]
6.6.2. Agregacja macierzy sztywności
Agregacja macierzy sztywności przebiega bardzo podobnie do agregacji wektora obciążeń. Posłużymy
się tym samym przykładem ramy. Przyjmijmy, że elementy macierzy sztywności prętów
1 i 2 opisują symbole:
[
K
1
]
=
[
K
11
1
K
12
1
K
13
1
K
14
1
K
15
1
K
16
1
K
21
1
K
22
1
K
23
1
K
24
1
K
25
1
K
26
1
K
31
1
K
32
1
K
33
1
K
34
1
K
35
1
K
36
1
K
41
1
K
42
1
K
43
1
K
44
1
K
45
1
K
46
1
K
51
1
K
52
1
K
53
1
K
54
1
K
55
1
K
56
1
K
61
1
K
62
1
K
63
1
K
64
1
K
65
1
K
66
1
]
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
17
[
K
2
]
=
[
K
11
2
K
12
2
K
13
2
K
14
2
K
15
2
K
16
2
K
21
2
K
22
2
K
23
2
K
24
2
K
25
2
K
26
2
K
31
2
K
32
2
K
33
2
K
34
2
K
35
2
K
36
2
K
41
2
K
42
2
K
43
2
K
44
2
K
45
2
K
46
2
K
51
2
K
52
2
K
53
2
K
54
2
K
55
2
K
56
2
K
61
2
K
62
2
K
63
2
K
64
2
K
65
2
K
66
2
]
Każdy z elementów macierzy sztywności pojedynczych prętów [
K
(1)
] i [
K
(2)
] ma swoje miejsce w
macierzy globalnej [
K
ij
] o wymiarze 9 x 9 w przypadku układy z trzema węzłami. Aby ułatwić sobie
znalezienie tego miejsca posłużymy się tą samą tabelą alokacji, którą wykorzystaliśmy przy agregacji wektora
obciążeń. Nieco inna będzie jedynie interpretacja zależności zawartych w tabeli powiązań, gdyż dotyczyć będą
one każdego indeksu dolnego poszczególnych elementów macierzy. Indeks pierwszy oznaczać będzie wiersz,
w który należy wpisać element, a indeks drugi kolumnę.
Tabela 6.6. Tabela powiązań dla elementów macierzy sztywności
numer indeksu elementu macierzy
nr pręta
1
2
3
4
5
6
1
1
2
3
4
5
6
2
4
5
6
7
8
9
Każdy element macierzy sztywności pojedynczego pręta ma oznaczenie dwuindeksowe (
K
mn
(e)
), zatem
aby znaleźć miejsce danego elementu należy zamienić oba indeksy. I tak na przykład element
K
11
(1)
dla
pierwszego pręta, po zamianie indeksów będzie elementem
K
11
całkowitej macierzy sztywności, a element
K
35
(2)
dla drugiego pręta, po zamianie indeksów będzie elementem
K
68
całkowitej macierzy sztywności.
Podobnie jak w przypadku wektora obciążeń, w niektórych polach znajdzie się więcej niż jeden element
macierzy wyznaczony dla pojedynczego pręta. Tak będzie np. z elementem
K
56
całkowitej macierzy
sztywności. Składać się na niego będą element
K
56
(1)
z pierwszego pręta i
K
23
(2)
z pręta drugiego.
Puste pola, w które nie wpisały się żadne wartości z macierzy sztywności dla pojedynczych prętów
najlepiej będzie wypełnić zerami. Zapiszmy zatem całą macierz sztywności po agregacji:
[
K
ij
]
=
[
K
11
1
K
12
1
K
13
1
K
14
1
K
15
1
K
16
1
0
0
0
K
21
1
K
22
1
K
23
1
K
24
1
K
25
1
K
26
1
0
0
0
K
31
1
K
32
1
K
33
1
K
34
1
K
35
1
K
36
1
0
0
0
K
41
1
K
42
1
K
43
1
K
44
1
K
11
2
K
45
1
K
12
2
K
46
1
K
13
2
K
14
2
K
15
2
K
16
2
K
51
1
K
52
1
K
53
1
K
54
1
K
21
2
K
55
1
K
22
2
K
56
1
K
23
2
K
24
2
K
25
2
K
26
2
K
61
1
K
62
1
K
63
1
K
64
1
K
31
2
K
65
1
K
32
2
K
66
1
K
33
2
K
34
2
K
35
2
K
36
2
0
0
0
K
41
2
K
42
2
K
43
2
K
44
2
K
45
2
K
46
2
0
0
0
K
51
2
K
52
2
K
53
2
K
54
2
K
55
2
K
56
2
0
0
0
K
61
2
K
62
2
K
63
2
K
64
2
K
65
2
K
66
2
]
=
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
18
=
[
K
11
K
12
K
13
K
14
K
15
K
16
K
17
K
18
K
19
K
21
K
22
K
23
K
24
K
25
K
26
K
27
K
28
K
29
K
31
K
32
K
33
K
34
K
35
K
36
K
37
K
38
K
39
K
41
K
42
K
43
K
44
K
45
K
46
K
47
K
48
K
49
K
51
K
52
K
53
K
54
K
55
K
56
K
57
K
58
K
59
K
61
K
62
K
63
K
64
K
65
K
66
K
67
K
68
K
69
K
71
K
72
K
73
K
74
K
75
K
76
K
77
K
78
K
79
K
81
K
82
K
83
K
84
K
85
K
86
K
87
K
88
K
89
K
91
K
92
K
93
K
94
K
95
K
96
K
97
K
98
K
99
]
Teraz, gdy wykonaliśmy agregację wszystkich macierzy potrzebnych do rozwiązania równania (6.1),
możemy przystąpić do ich modyfikacji, czyli do uwzględnienia warunków podparcia rzeczywistej konstrukcji.
6.7. Warunki podparcia
Jak pamiętamy, pierwszym etapem rozwiązania ramy komputerową metodą przemieszczeń było
wyznaczenie i ponumerowanie kierunków przemieszczeń węzłowych. Zakładaliśmy wówczas, że każdy węzeł
może mieć trzy przemieszczenia, niezależnie czy rama była w danym węźle podparta czy też nie.
Obecność podpór w niektórych węzłach ogranicza swobodę ich przemieszczeń. Jeżeli wiemy, że dane
przemieszczenie w podporze jest równe zero (znamy jego wartość), lub możemy je pominąć ze względu na
redukcję statyczną, to musimy wyeliminować równanie równowagi układu (6.1). W tym celu zerujemy
odpowiedni wiersz z wektora obciążeń oraz wiersz i kolumnę z macierzy sztywności układu. Jeżeli
przemieszczenie
q
r
jest równe zero, to przy mnożeniu macierzowym cała kolumna
r będzie mnożona przez
zero. Wobec tego można ją pominąć, a wiersz
r będzie niepotrzebnym równaniem (zmniejsza się liczba
niewiadomych). Praktycznie modyfikacja polega na wykreśleniu wiersza i kolumny o numerze kierunku,
wzdłuż którego jest podpora.
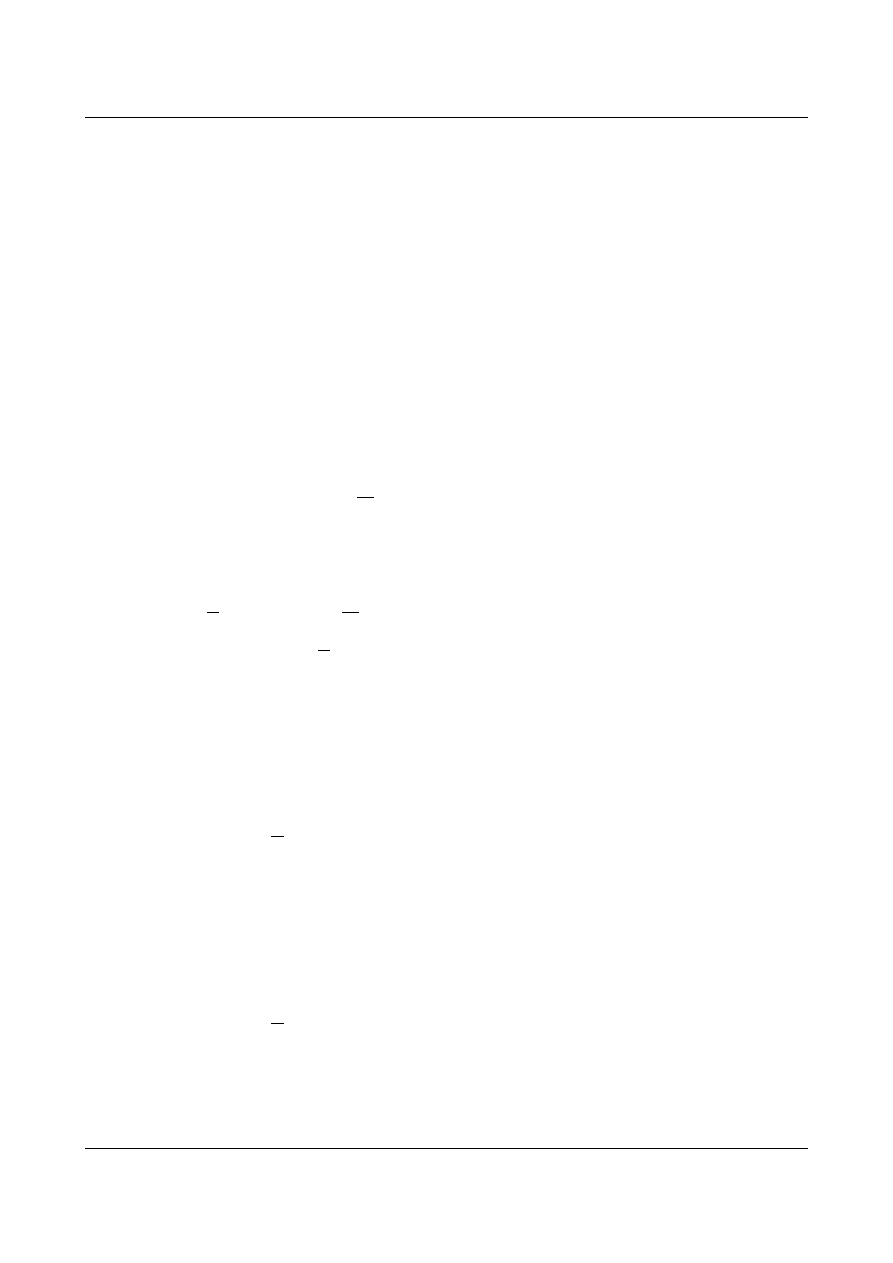
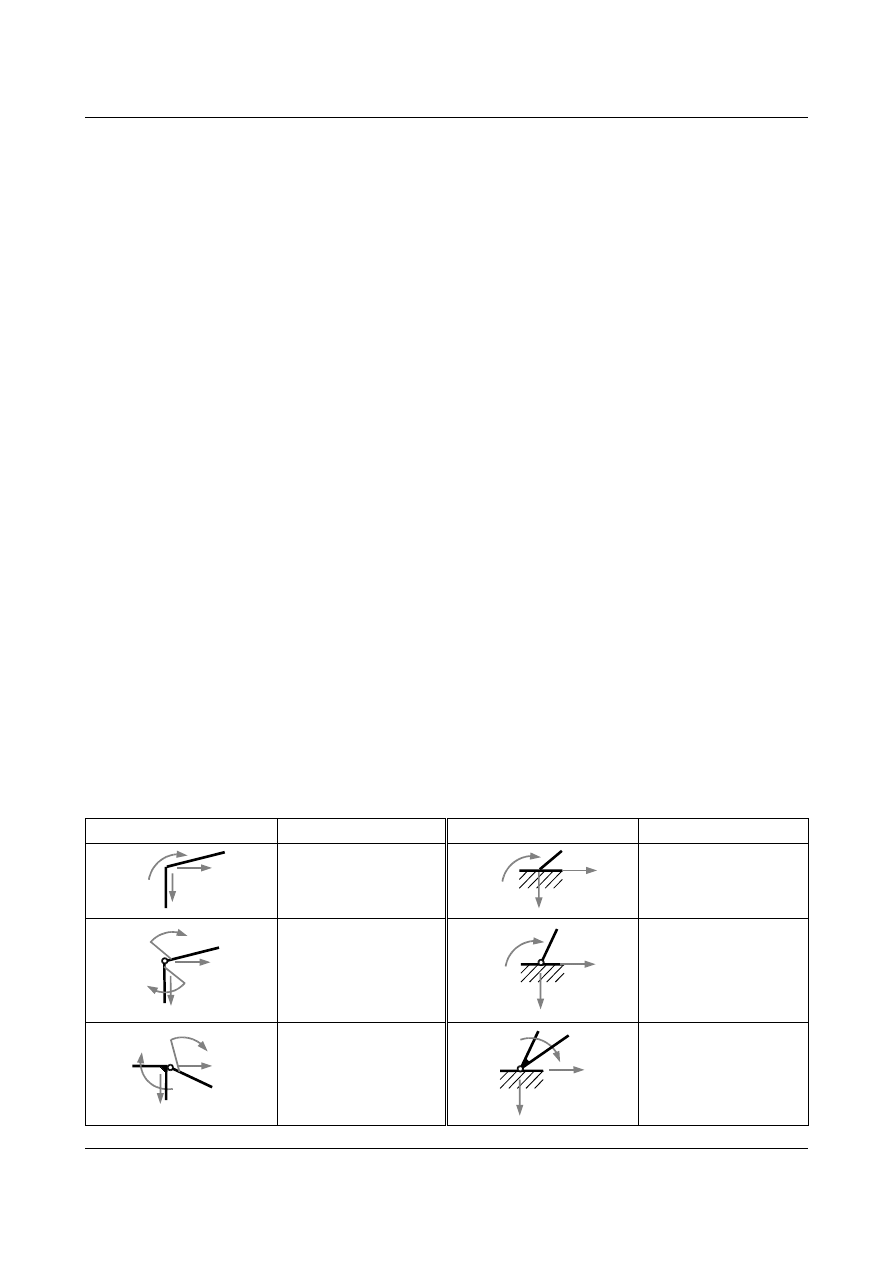
Ustalmy zatem, które przemieszczenia możemy uznać za zerowe, które możemy pominąć ze względu na
redukcję statyczną, a których pominąć nie należy. Ułatwi to nam tabela 6.7, w której podano kilka
przykładowych zamocowań prętów.
Tabela 6.7. Kierunki i wartości przemieszczeń w węzłach
Schemat podparcia węzła
Wartości przemieszczeń
Schemat podparcia węzła
Wartości przemieszczeń
q
1
q
2
q
3
q
1
≠0
q
2
≠0
q
3
≠0
q
1
q
2
q
3
q
1
=0
q
2
=0
q
3
=0
q
1
q
2
q
3
q
4
q
1
≠0
q
2
≠0
q
3
≠0
red. stat.
R
3
=0
q
4
≠0
red. stat.
R
4
=0
q
1
q
2
q
3
q
1
=0
q
2
=0
q
3
≠0
red. stat.
R
3
=0
q
1
q
2
q
3
q
4
q
1
≠0
q
2
≠0
q
3
≠0
q
4
≠0
red. stat.
R
4
=0
q
1
q
2
q
3
q
1
=0
q
2
=0
q
3
≠0
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
19
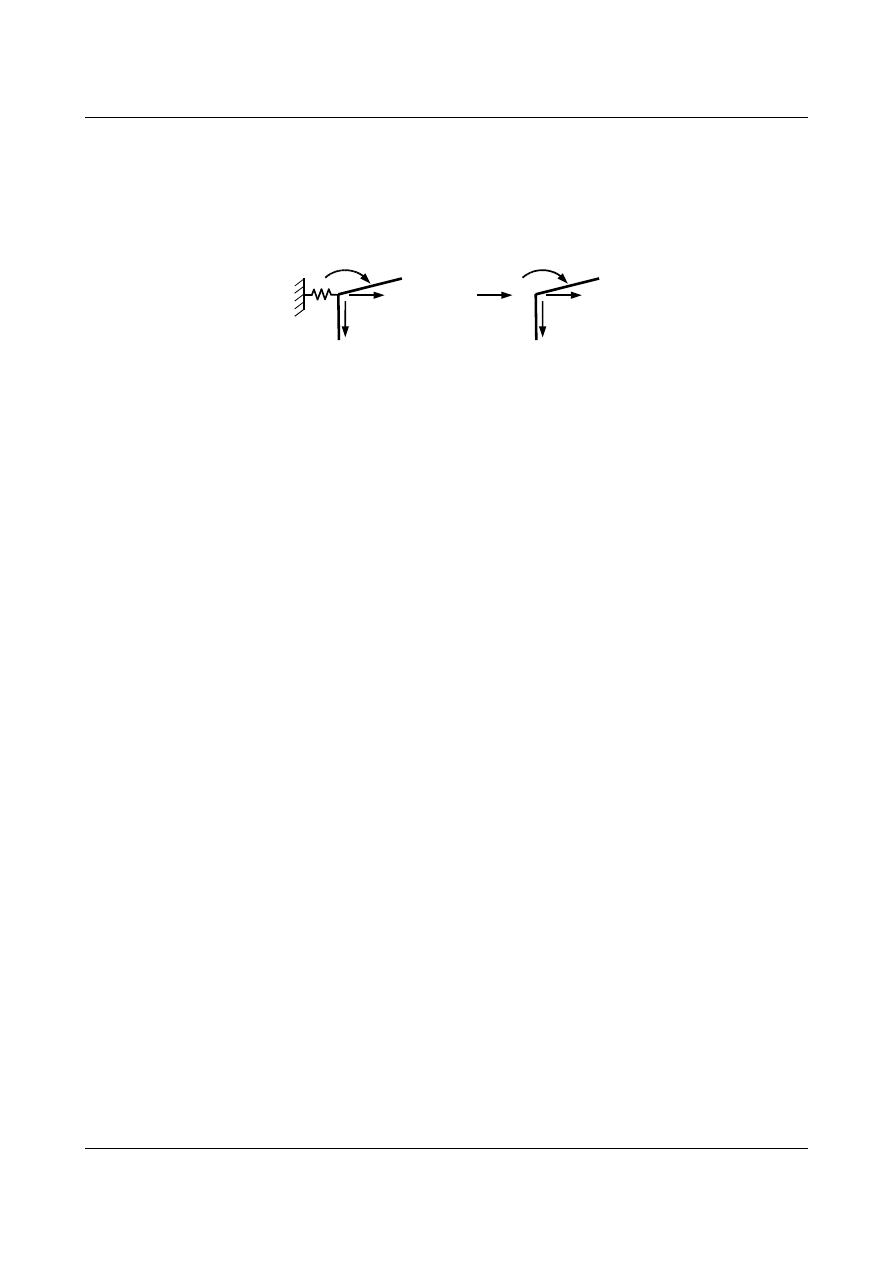
Obecność podpory sprężystej w węźle ramy uwzględniamy nieco inaczej niż obecność sztywnych
podpór. Ma ona bowiem wpływ na macierz sztywności, a nie jak było do tej pory, na wektor niewiadomych
przemieszczeń. Modyfikacji dokonujemy przez dodanie parametru sztywności
k podpory sprężystej do
odpowiadającego numerowi jej kierunku wyrazu z przekątnej macierzy sztywności układu.
q
1
q
2
q
3
k
q
1
q
2
q
3
R
k
=q
1
· k
Rys. 6.10. Podpora sprężysta w węźle ramy
W przypadku podpory sprężystej z rys. 6.10, sztywność
k dodamy do wyrazu K
11
w macierzy sztywności
układu, ponieważ kierunek reakcji
R
k
w sprężynie pokrywa się z kierunkiem pierwszego przemieszczenia.
Zastanówmy się zatem, które przemieszczenia będą zerowe w przykładzie z rys. 6.1. Rama ma
utwierdzenia w dwóch węzłach, możemy zatem napisać, że przemieszczenia w tych węzłach są równe zero:
q
1
=q
2
=q
3
=q
7
=q
8
=q
9
=0
Wynika z tego, że niezerowe są tylko trzy pozostałe przemieszczenia:
q
4
≠0
q
5
≠0
q
6
≠0
Wyzerujmy teraz w wektorze obciążeń wiersze, a w macierzy sztywności wiersze i kolumny, odpowiadające
zerowym przemieszczeniom. Na przykład przemieszczenie po kierunku pierwszym jest zerowe, możemy więc
“wyzerować” pierwszy wiersz w wektorze obciążeń, oraz pierwszy wiersz i pierwszą kolumnę w macierzy
sztywności układu. Jeżeli nie zmieniamy wymiaru macierzy (“zerowe” wiersze pozostają) to na głównej
przekątnej należy wpisać jedynki. W ten sposób mnożenie pierwszego wiersza macierzy sztywności przez
wektor przemieszczeń daje warunek
q
1
= 0. Jeśli tego nie uczynimy macierz sztywności będzie osobliwa (nie
ma rozwiązań).
[
1 0
0
0
0
0
0
0
0
0 1 0
0
0
0
0
0
0
0 0 1
0
0
0
0
0
0
0 0 0 K
44
K
45
K
46
0 0 0
0 0 0 K
54
K
55
K
56
0 0 0
0 0 0 K
64
K
65
K
66
0 0 0
0
0
0
0
0
0
1 0 0
0
0
0
0
0
0
0 1 0
0
0
0
0
0
0
0 0 1
]
⋅
[
q
1
q
2
q
3
q
4
q
5
q
6
q
7
q
8
q
9
]
=
[
0
0
0
R
4
R
5
R
6
0
0
0
]
Jeżeli do rozwiązania układu równań użyjemy programu komputerowego, nie będzie miało znaczenia, jakiego
jest on wymiaru. Do obliczeń ręcznych wskazane byłoby wykreślenie “wyzerowanych” wierszy i kolumn.
Wtedy pozostaną tylko trzy równania:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater

Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
20
[
K
44
K
45
K
46
K
54
K
55
K
56
K
64
K
65
K
66
]
⋅
[
q
4
q
5
q
6
]
=
[
R
4
R
5
R
6
]
Rozwiązaniem powyższego układu jest wektor niewiadomych przemieszczeń [
q]. Dysponując rzeczywistymi
przemieszczeniami węzłów można określić wartości sił wewnętrznych.
6.8. Interpretacja wyników
W metodzie przemieszczeń, uzyskane po rozwiązaniu układu równań kanonicznych, wartości
przemieszczeń podstawialiśmy do wzorów transformacyjnych. Otrzymywaliśmy w ten sposób wartości sił
przekrojowych. W wersji komputerowej, siły przekrojowe na każdym z prętów ramy, uzyskamy bezpośrednio
z zależności:
N
ik
=− R
1
e
N
ki
= R
4
e
T
ik
=− R
2
e
T
ki
= R
5
e
M
ik
= R
3
e
M
ki
= R
6
e
(6.18)
Jak widać, wystarczy znaleźć wartości reakcji, jakie powstaną w utwierdzeniach prętów w układach
lokalnych. Posłuży nam do tego omówione już wcześniej, równanie równowagi pojedynczego pręta w
lokalnym układzie współrzędnych (6.3). Tym razem jednak, znamy już zarówno macierz sztywności
[
K
e
]
,
jak i wektor sił przywęzłowych
[
R
0
e
]
. Znamy też przemieszczenia węzłów, ale w układzie globalnym.
Pozostaje nam wyznaczyć wektor przemieszczeń węzłów
[
q
e
]
w układzie lokalnym każdego pręta.
Wcześniej zajmowaliśmy się agregacją macierzy całego układu prętowego z macierzy elementowych.
Teraz, z globalnego wektora przemieszczeń [
q] musimy wydzielić wektory dotyczące poszczególnych
elementów prętowych. Aby tego dokonać, ponownie posłużymy się tabelą powiązań.
Przyjmijmy zatem, że dla naszej przykładowej ramy (rys. 6.1) uzyskaliśmy, po rozwiązaniu równania
równowagi, wektor przemieszczeń [
q]:
[q]=
[
0
0
0
q
4
q
5
q
6
0
0
0
]
=
[
Q
1
Q
2
Q
3
Q
4
Q
5
Q
6
Q
7
Q
8
Q
9
]
Zgodnie z tabelą powiązań (tabela 6.5), elementy od pierwszego do szóstego z wektora [
q], stanowią wektor
przemieszczeń dla pierwszego pręta [
q
(1)
], natomiast elementy od czwartego do dziewiątego, stanowią wektor
przemieszczeń dla drugiego pręta [
q
(2)
]. Wiemy to z analizy ostatniego wiersza tabeli 6.5 alokacji, który
dotyczy drugiego pręta. Pokazuje on, które przemieszczenia globalne
Q
i
odpowiadają kolejnym
przemieszczeniom pręta drugiego q
i
2
w globalnym układzie współrzędnych.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater

Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
21
[q
1
]=
[
Q
1
Q
2
Q
3
Q
4
Q
5
Q
6
]
[q
2
]=
[
Q
4
Q
5
Q
6
Q
7
Q
8
Q
9
]
Aby uzyskać wektory przemieszczeń
[
q
e
]
w lokalnym układzie współrzędnych musimy skorzystać z prawa
transformacji (6.15) wektora [
q
(e)
] z globalnego do lokalnego układu współrzędnych. Tak przygotowany
wektor przemieszczeń podstawiamy do równania (6.3) i na podstawie związków (6.2) wyznaczamy, a potem
rysujemy siły wewnętrzne.
6.9. Sprawdzenie wyników
Kontrola wyników w komputerowej wersji metody przemieszczeń wygląda bardzo podobnie jak w
klasycznej metodzie przemieszczeń. Nie ma jednak potrzeby sprawdzania symetrii macierzy sztywności
pojedynczych prętów (elementowe macierze sztywności są z założenia symetryczne). Warto natomiast zwrócić
uwagę czy macierz sztywności całego układu również jest symetryczna.
6.9.1. Sprawdzenie kinematyczne
Sprawdzenie kinematyczne pozwala ocenić poprawność wykresu momentów zginających. Kontrolę
kinematyczną przeprowadza się podobnie jak w metodzie sił tzn. opierając się na równaniu pracy wirtualnej:
∑
i
P
i
i
∑
i
R
k
k
=
∑
j
{
∫
s
M
M
P
EI
t
t
h
ds
∫
s
N
N
P
EA
t
t
ds
∫
s
T
T
P
GA
ds
}
∑
n
R
n
R
n
P
f
∑
m
B
m
b
m
gdzie:
M
P
, N
P
, T
P
- rzeczywiste siły wewnętrzne,
Δ
i
- niewiadome przemieszczenie,
P
i
- wirtualna siła jednostkowa,
R
k
- reakcja wywołana siłą jednostkową, wirtualną w podporze doznającej przemieszczenia,
k
- znane przemieszczenie podpory (narzucone osiadanie podpór),
R
n
- reakcja wirtualna w
n-tej podporze podatnej,
R
n
P
- reakcja rzeczywista w n-tej podporze podatnej,
b
m
- wartość błędu montażu (liniowa lub kątowa) po kierunku
m,
B
m
- siła w pręcie po kierunku wielkości obarczonej błędem.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater

Część 2
6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ
22
Przy wykonywaniu kontroli kinematycznej w metodzie przemieszczeń zwykle pomijaliśmy wpływ sił
normalnych i poprzecznych. Ponieważ jednak, wersja komputerowa zakłada uwzględnienie sił normalnych i
rezygnację z zasady nieskracalności prętów, trzeba pamiętać o uwzględniemiu wpływu sił normalnych w
kontroli kinematycznej.
6.9.2. Sprawdzenie statyczne
Zadanie jest rozwiązane poprawnie jeśli w sprawdzeniu statycznym dla całego układu, obciążonego
siłami zewnętrznymi oraz wyznaczonymi przez nas siłami w podporach (dla układu zawieszonego na
reakcjach podporowych), okaże się, że prawdziwe są równości:
∑
X
=0
∑
Y
=0
∑
M
=0
Suma momentów może być zapisana względem dowolnego punktu układu.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Wyszukiwarka
Podobne podstrony:
2003 06 19
1999.06.19 prawdopodobie stwo i statystyka
1999 06 19 prawdopodobie stwo i statystykaid 18597
09 06 19 DTZ prezentacja tenant mix FINAL1
2000 06 19 1286
1999 06 19 praid 18596 Nieznany
06 19 86
2012 06 19 Gromosław Czempiński
GTH Poradnik Handlowca 2009 06 19
Przykładowe zadania wycena 2011 06 19 a
Wyniki 2012 06 19 i 26TerminI i II
08 06 19 egzch rozw
2012 06 19 Prokuratura Okręgowa w Warszawie wszczęła wczoraj śledztwo w sprawie śmierci gen Sławomir
2010 06 19 Finansowe i ezoteryczne źróda komunizmu
więcej podobnych podstron