© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
1
OGÓLNOTECHNICZNE
PODSTAWY BIOTECHNOLOGII
Z GRAFIKĄ INŻYNIERSKĄ
Wykład V
Podstawowe zasady statyki
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
ELEMENTY STATYKI
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
POJĘCIA STOPNIA SWOBODY I WIĘZÓW
W statyce bardzo ważną rolę odgrywają pojęcia stopni swobody
oraz więzów.
Stopniem swobody nazywamy możliwość wykonywania przez dane
ciało pewnego ruchu niezależnego od innych ruchów.
Punkt materialny ma na płaszczyźnie 2, a w przestrzeni 3 stopnie
swobody.
Ciało doskonale sztywne ma na płaszczyźnie 3, a w przestrzeni 6
stopni swobody.
Więzami nazywamy warunki ograniczające ruch punktu lub ciała.
Więzy zawsze zmniejszają liczbę stopni swobody.
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
AKSJOMATY STATYKI
Statyka, podobnie jak większość nauk opiera się na zestawie pewnych
twierdzeń zaczerpniętych z innych dziedzin, które przyjmuje się jako
prawdziwe. Twierdzenia te nazywamy aksjomatami.
Aksjomaty statyki wynikają z podstawowych praw fizyki i zasad
rachunku wektorowego.
Ja przedstawię Państwu ujęcie, w którym funkcjonuje 6 aksjomatów.
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
AKSJOMATY STATYKI
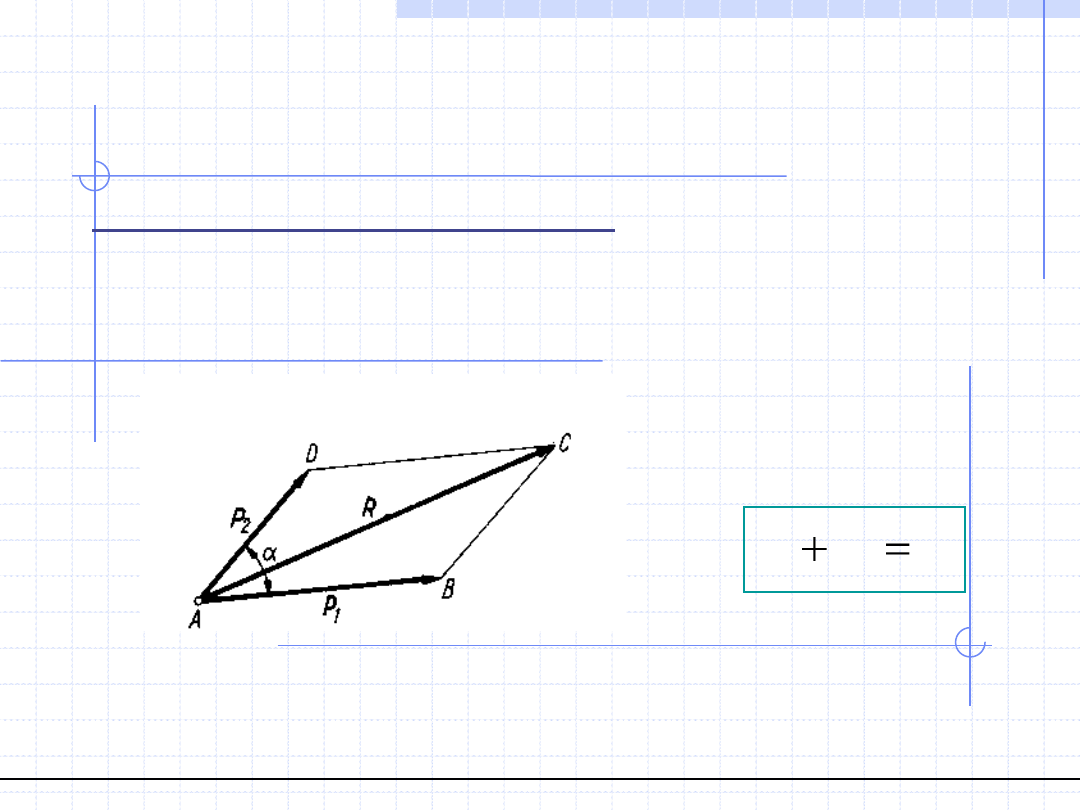
Aksjomat I (zasada dodawania sił):
Dwie siły P1 i P2 działające na ten sam punkt można zastąpić jedną
siłą R działającą w tym samym punkcie i będącą sumą wektorową
wektorów P1 i P2.
Siłę R nazywamy wypadkową układu sił P1 i P2.
R
P
P
2
1
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
AKSJOMATY STATYKI cd.
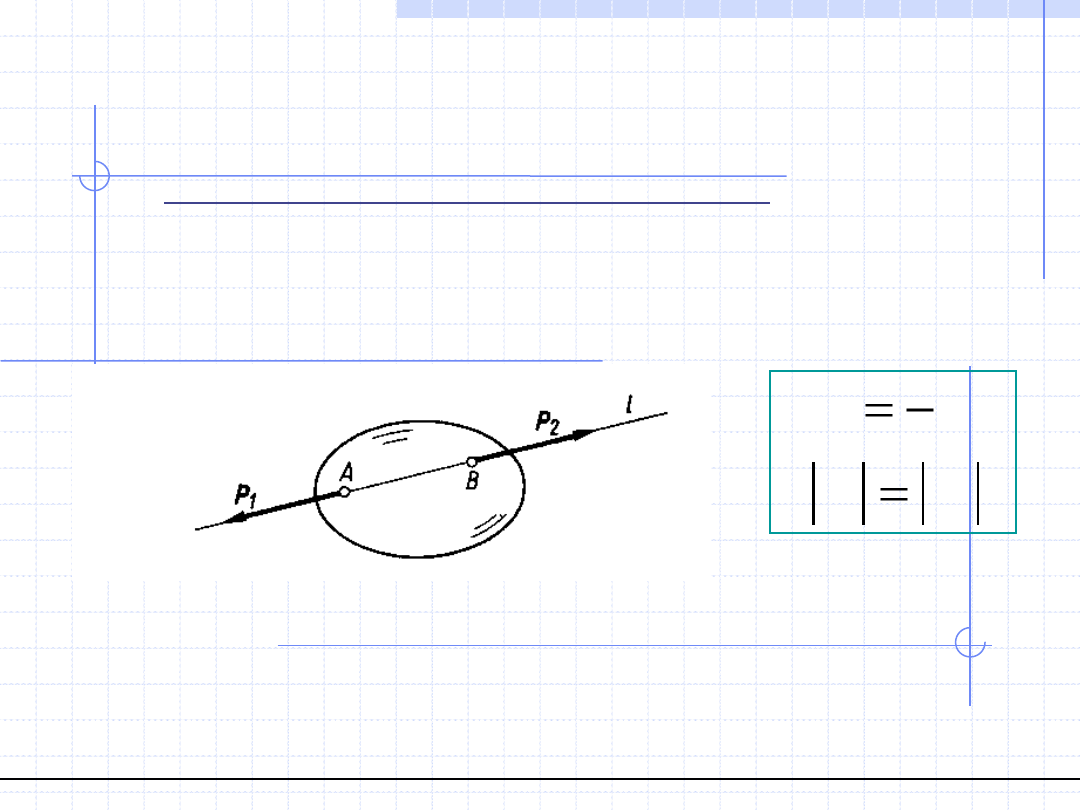
Aksjomat II (zasada równoważności sił):
Jeżeli do ciała przyłożone są dwie siły P
1
i P
2
to równoważą się
one tylko wtedy, kiedy mają tę samą linię działania, te same
wartości liczbowe i przeciwne zwroty.
2
1
2
1
P
P
P
P
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
AKSJOMATY STATYKI cd.
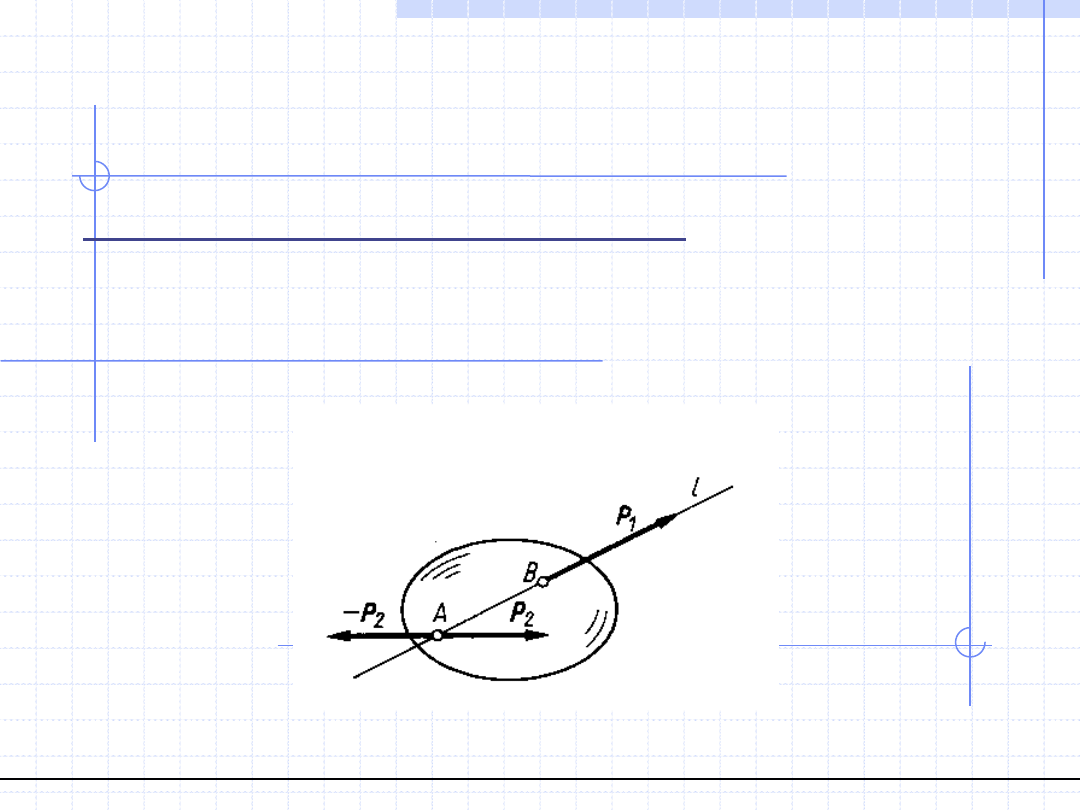
Aksjomat III (zasada układu zerowego):
Skutek działania dowolnego układu sił, przyłożonego do ciała nie zmieni
się, jeżeli do tego układu dodamy lub odejmiemy dowolny układ
równoważących się sił P
2
i -P
2
czyli tzw. układ zerowy.
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
AKSJOMATY STATYKI cd.
Aksjomat IV (zasada zesztywnienia):
Jeżeli ciało odkształcalne znajduje się w równowadze pod
działaniem pewnego układu sił, to również pozostanie w
równowadze ciało doskonale sztywne (nieodkształcalne)
identyczne geometrycznie, pod wpływem tego samego
układu sił.
Stwierdzenie odwrotne nie jest prawdziwe, tzn. że
równowaga ciała doskonale sztywnego jest konieczna ale nie
wystarczająca do równowagi ciała rzeczywistego.
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
AKSJOMATY STATYKI cd.
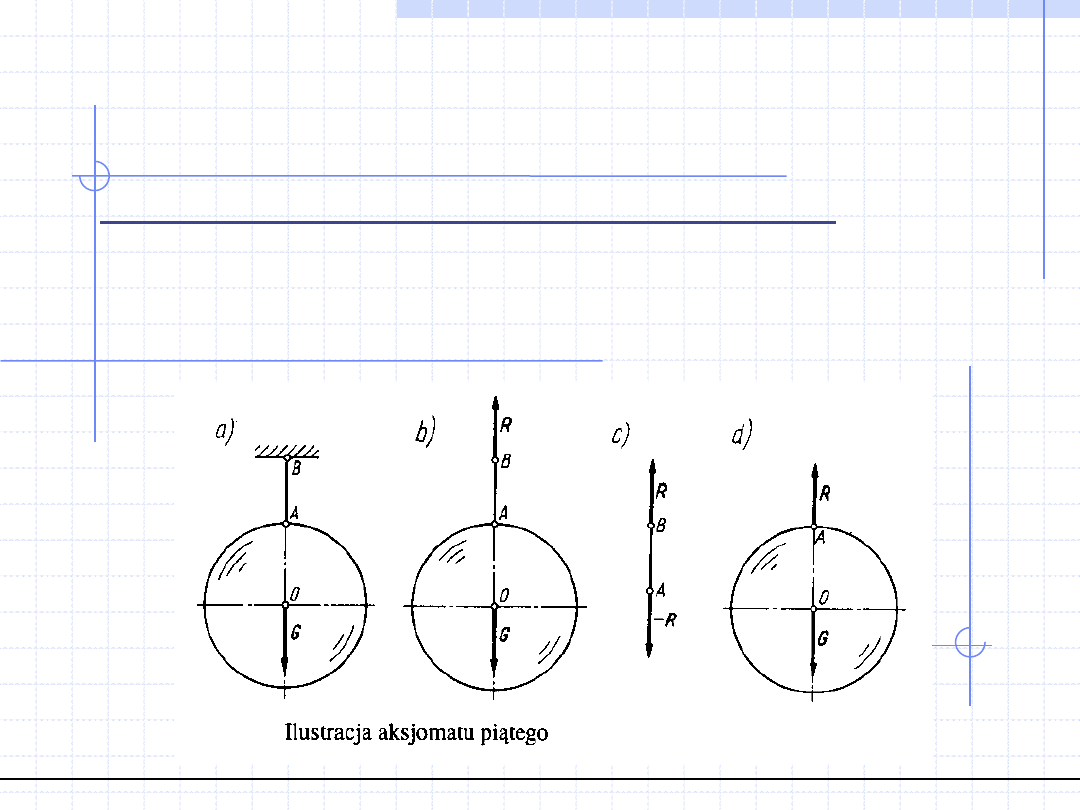
Aksjomat V (zasada działania i przeciwdziałania):
Każdemu działaniu towarzyszy równe co do wartości o przeciwnym
zwrocie i leżace na tej samej prostej przeciwdziałanie. To
przeciwdziałanie nazywamy siłą reakcji.
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
AKSJOMATY STATYKI cd.
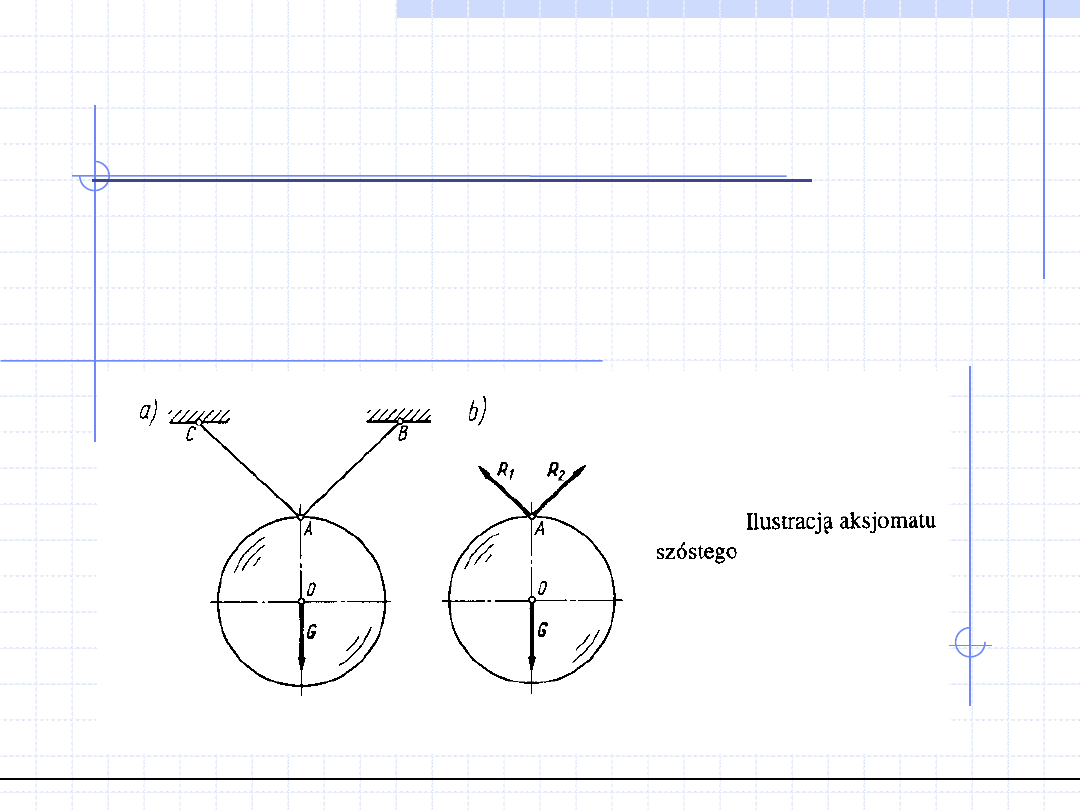
Aksjomat VI (zasada oswobodzenia od więzów):
Każde ciało nieswobodne (ograniczone więzami) można myślowo
oswobodzić z więzów, zastępując ich działania reakcjami, a następnie
rozpatrywać ciało swobodne (bez więzów) znajdujące się
pod działaniem sił czynnych i biernych (reakcji więzów).
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
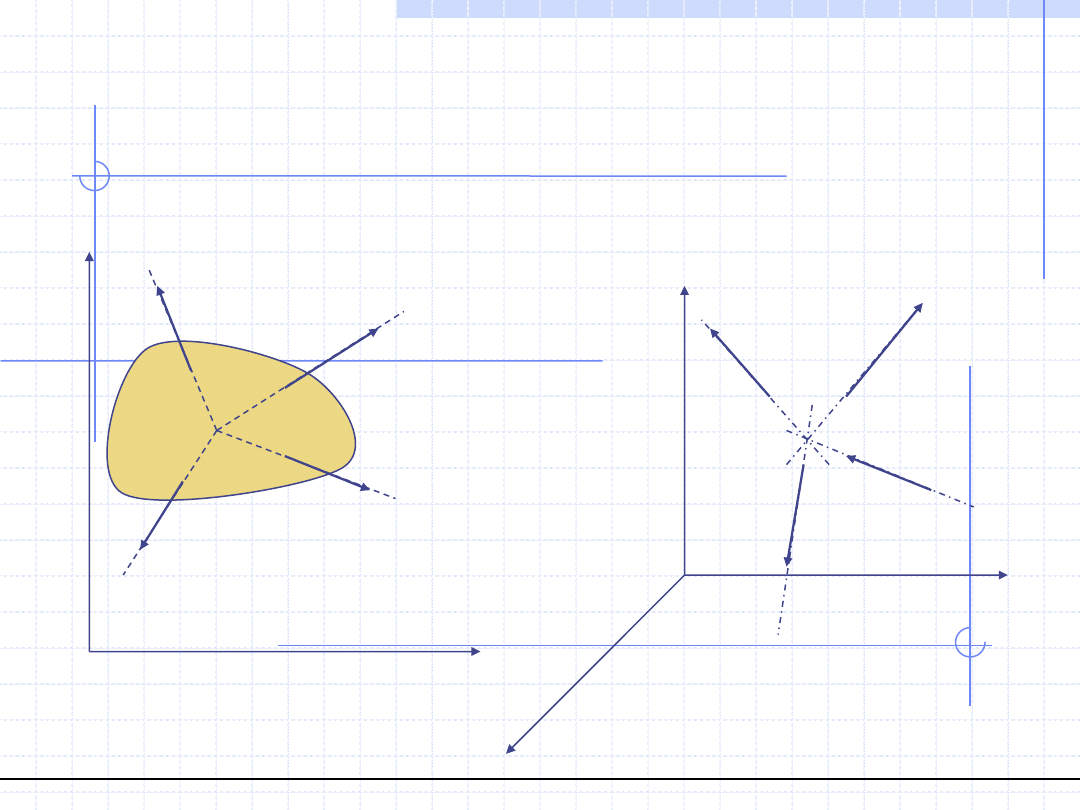
ZBIEŻNE UKŁADY SIŁ
Układy sił, których linie działania przecinają się w jednym punkcie nazywamy
zbieżnymi układami sił. Takie układy mogą być płaskie lub przestrzenne.
x
y
z
M
F
1
F
2
F
3
F
4
x
y
M
F
1
F
2
F
3
F
4
O
O
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
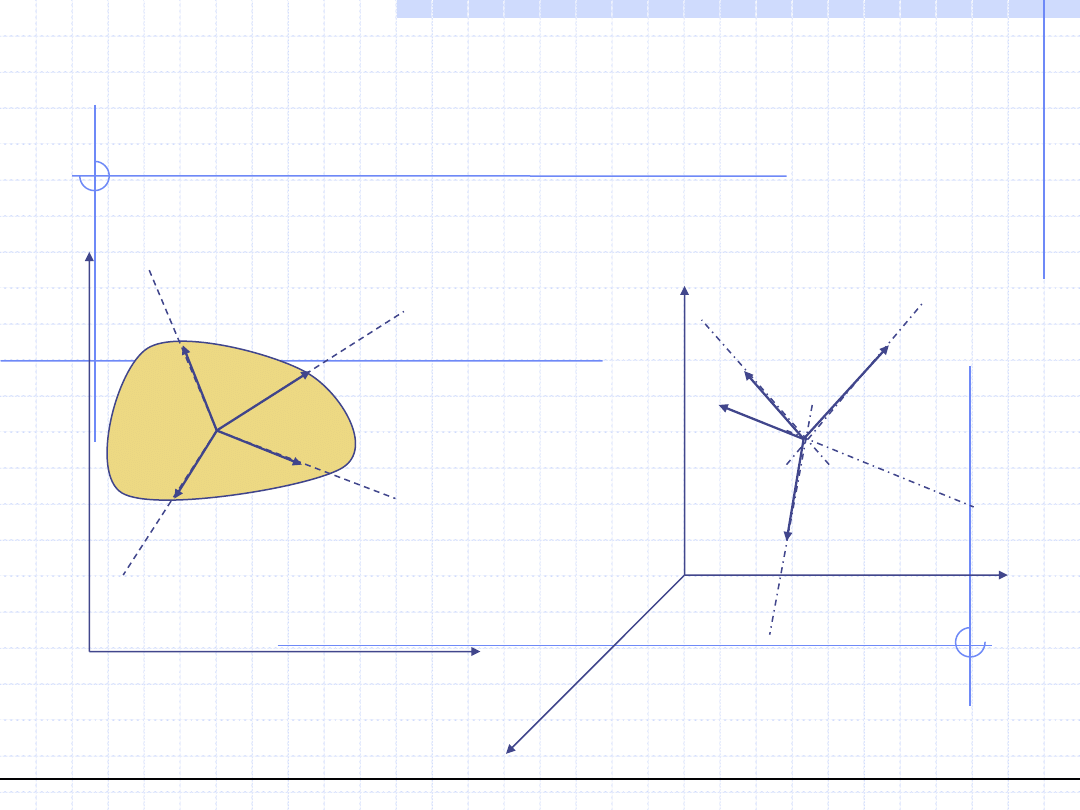
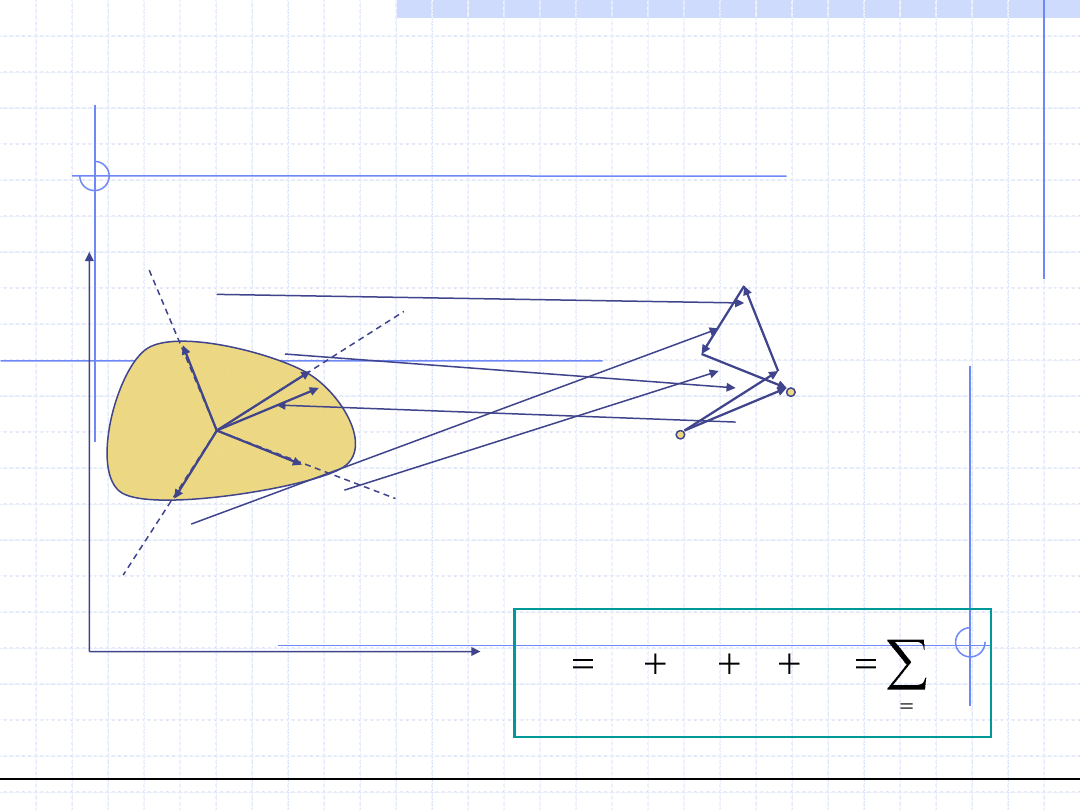
ZBIEŻNE UKŁADY SIŁ
WYZNACZANIE WYPADKOWEJ
Wypadkową zbieżnego układu sił wyznacza się przesuwając wszystkie siły do punktu
przecięcia i dodając wektory dowolną metodą.
x
y
z
M
F
1
F
2
F
3
F
4
x
y
M
F
1
F
2
F
3
F
4
O
O
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
ZBIEŻNE UKŁADY SIŁ
WYZNACZANIE WYPADKOWEJ cd.
W przypadku płaskiego układu sił możemy zastosować metodę wieloboku. W przypadku
układu przestrzennego należy geometrycznie dodawać kolejne siły metodą równoległoboku
lub zbudować przestrzenny wielobok sił.
x
y
M
F
1
F
2
F
3
F
4
O
W
W
A
K
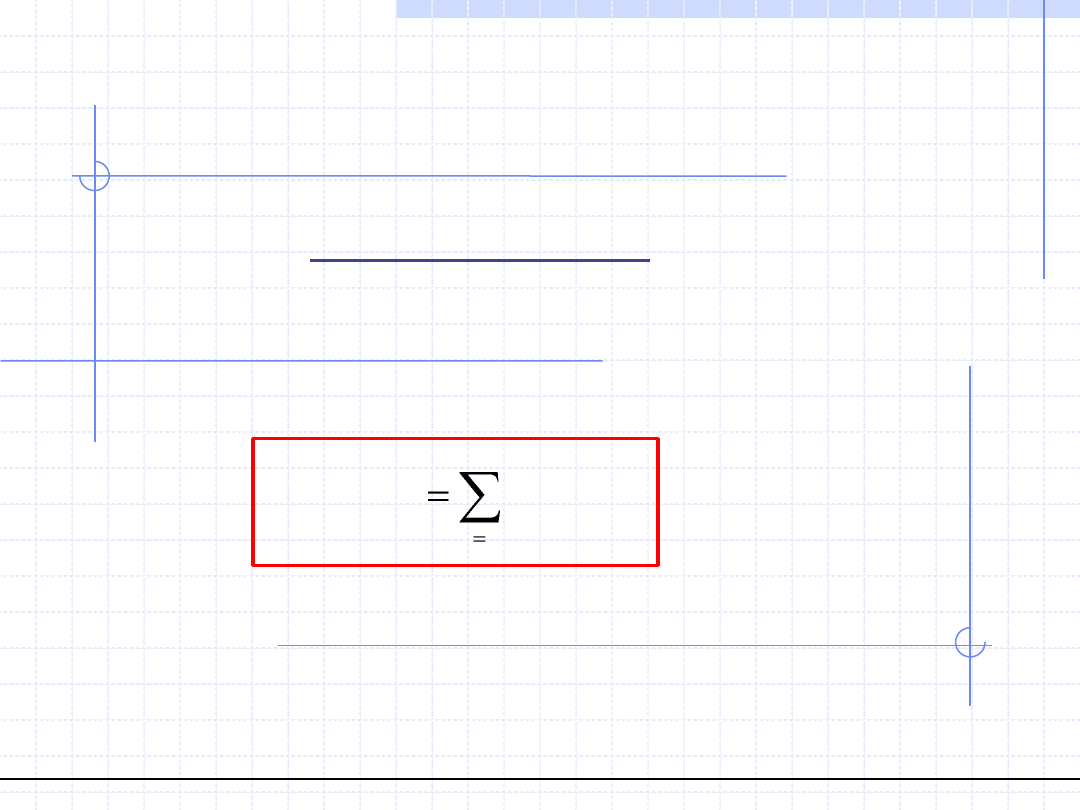
Stosując algebraiczny zapis sił jako wektorów
znajdowanie wypadkowej polega na dodawaniu
wektorowym wszystkich sił składowych, czyli:
n
i
i
n
F
F
F
F
W
1
2
1
...
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
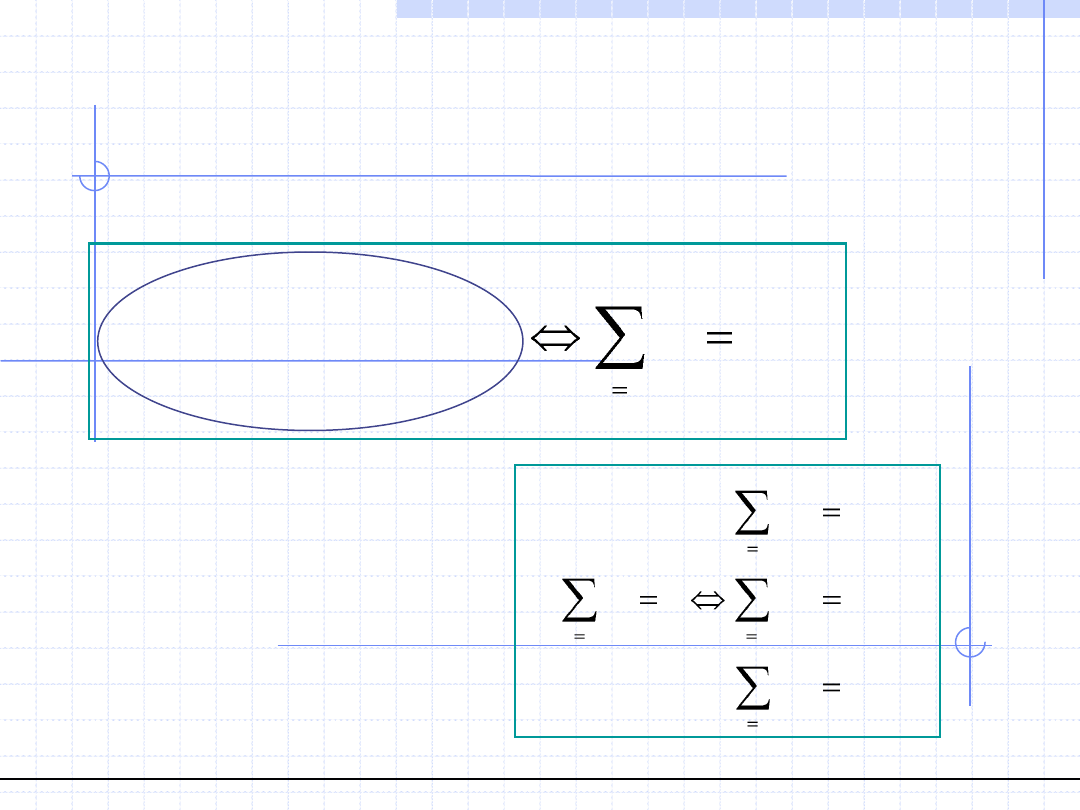
ZBIEŻNE UKŁADY SIŁ
PODSTAWOWE TWIERDZENIE O RÓWNOWADZE
n
i
i
F
1
0
Z podstawowych praw fizyki wynika twierdzenie o równowadze ciała na które
działa zbieżny układ sił:
Ciało na które działa układ
sił zbieżnych F
1
,F
2
,…F
n
jest w równowadze statycznej
Warunek po prawej stronie równoważności
można zapisać algebraicznie za pomocą
trzech równań dotyczących składowych:
n
i
zi
n
i
yi
n
i
xi
n
i
i
F
F
F
F
1
1
1
1
0
0
0
0
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
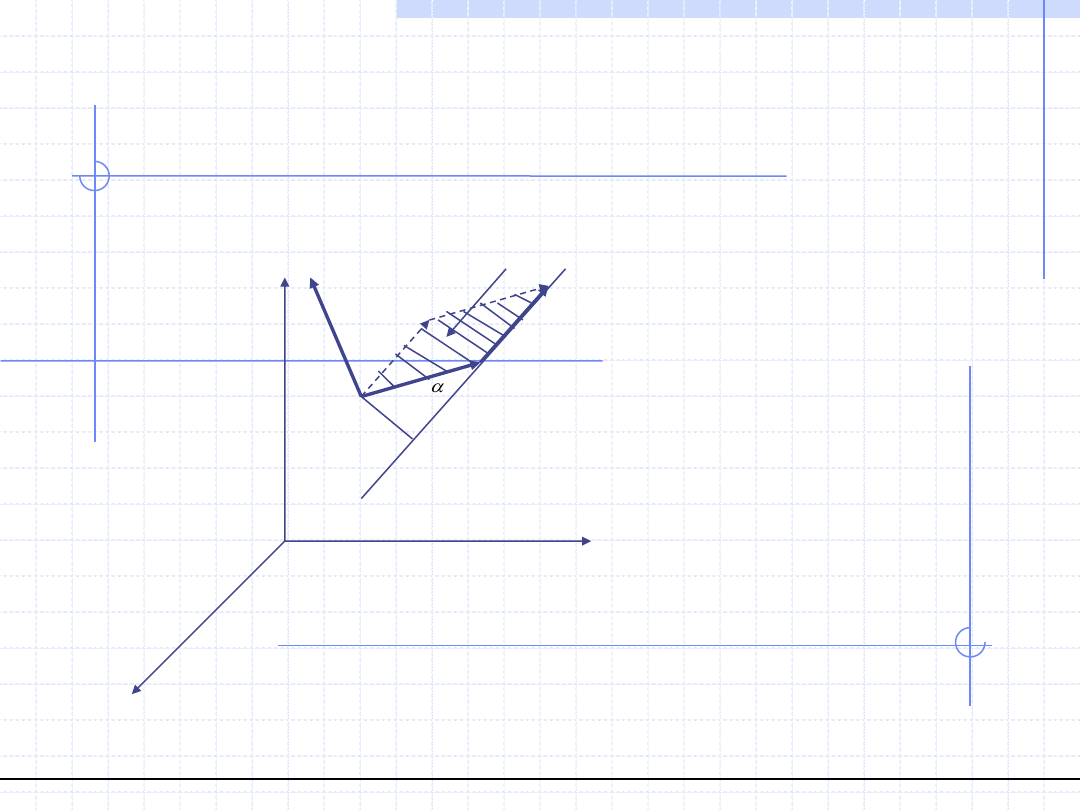
MOMENT SIŁY WZGLĘDEM PUNKTU
F
r
M
O
x
Pojęcie momentu siły jest nieodzowne przy rozpatrywaniu sił niezbieżnych
działających na ciało płaskie lub przestrzenne. Istnieją różne momenty sił.
Najważniejszy jest moment siły względem punktu.
F
r
O
A
B
M
O
.
h
y
z
Momentem siły F względem punktu O
nazywamy wektor M
O
będący iloczynem
wektorowym wektorów r i F czyli
Wektor r określa wzajemne położenie
punktu O i punktu zaczepienia siły A.
Składowe wektora r można obliczyć
za pomocą wzorów:
O
A
z
O
A
y
O
A
x
z
z
r
y
y
r
x
x
r
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
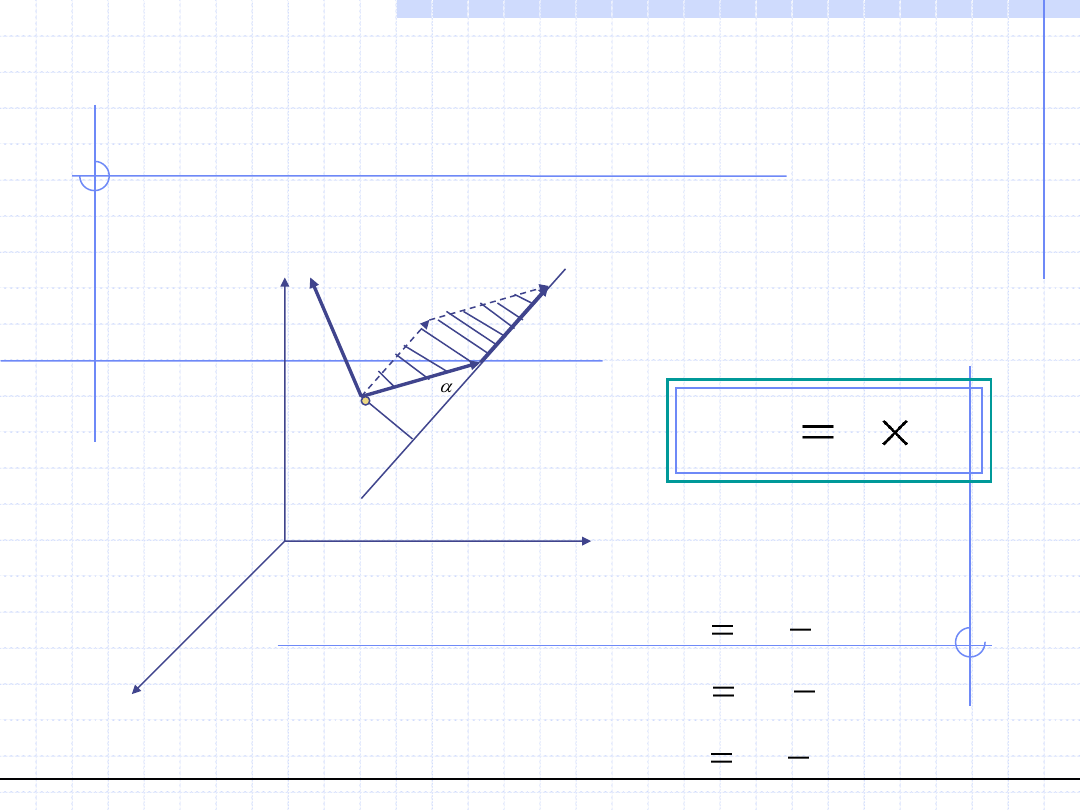
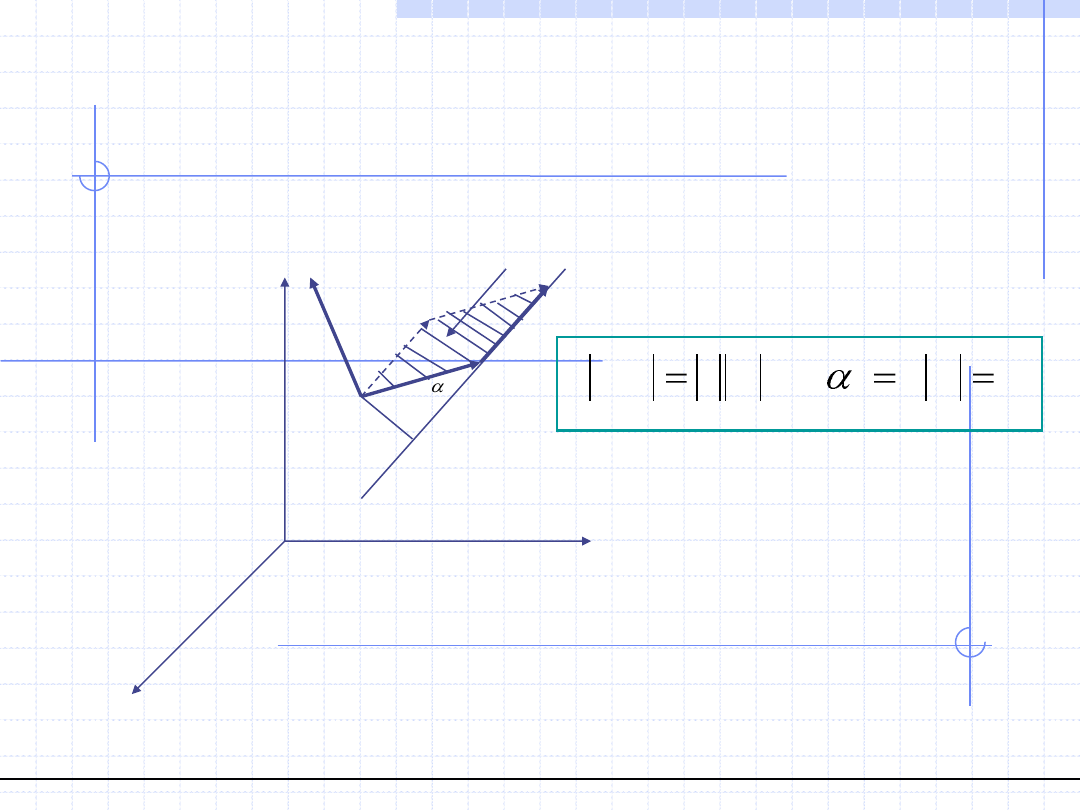
MOMENT SIŁY WZGLĘDEM PUNKTU cd.
x
Definicja momentu siły łącznie z definicją iloczynu wektorowego wyznaczają
podstawowe własności momentu siły.
F
r
O
A
B
M
O
.
h
y
z
1.
Długość momentu jest określona
wzorem:
S
F
h
F
r
M
O
)
sin(
S
2.
Kierunek momentu siły jest prostopadły
do płaszczyzny wyznaczonej przez
wektory r i F.
3.
Zwrot wektora momentu siły wyznaczają
reguły korkociągu lub prawej dłoni.
4.
Wektor M
O
jest wektorem swobodnym.
W razie potrzeby najczęściej zaczepia
się go w punkcie O.
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
MOMENT SIŁY WZGLĘDEM PUNKTU cd.
x
F
r
O
A
B
M
O
.
h
y
z
S
5.
Moment siły nie zależy od punktu
zaczepienia siły. Wynika to ze wzoru
określającego długość, w którym
wielkość h oznacza odległość punktu O
od linii działania siły. Odległość h
nazywana jest ramieniem siły
względem punktu O.
6.
Moment siły względem punktu leżącego
na jej linii działania jest wektorem
zerowym.
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
MOMENT SIŁY WZGLĘDEM PUNKTU
Twierdzenie Varignona
Z pojęciem momentu siły względem punktu wiąże się ważne
w statyce tzw. twierdzenie Varignona dotyczące układów sił.
Jeżeli na ciało działa dowolny układ sił P
1
,P
2
,…,P
n
a wypadkowa
tego układu wynosi W to moment siły tej wypadkowej jest równy
sumie momentów poszczególnych sił co można zapisać:
n
i
i
O
O
P
M
W
M
1
)
(
)
(
Oczywiście wszystkie momenty liczone są względem tego
samego punktu O.
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
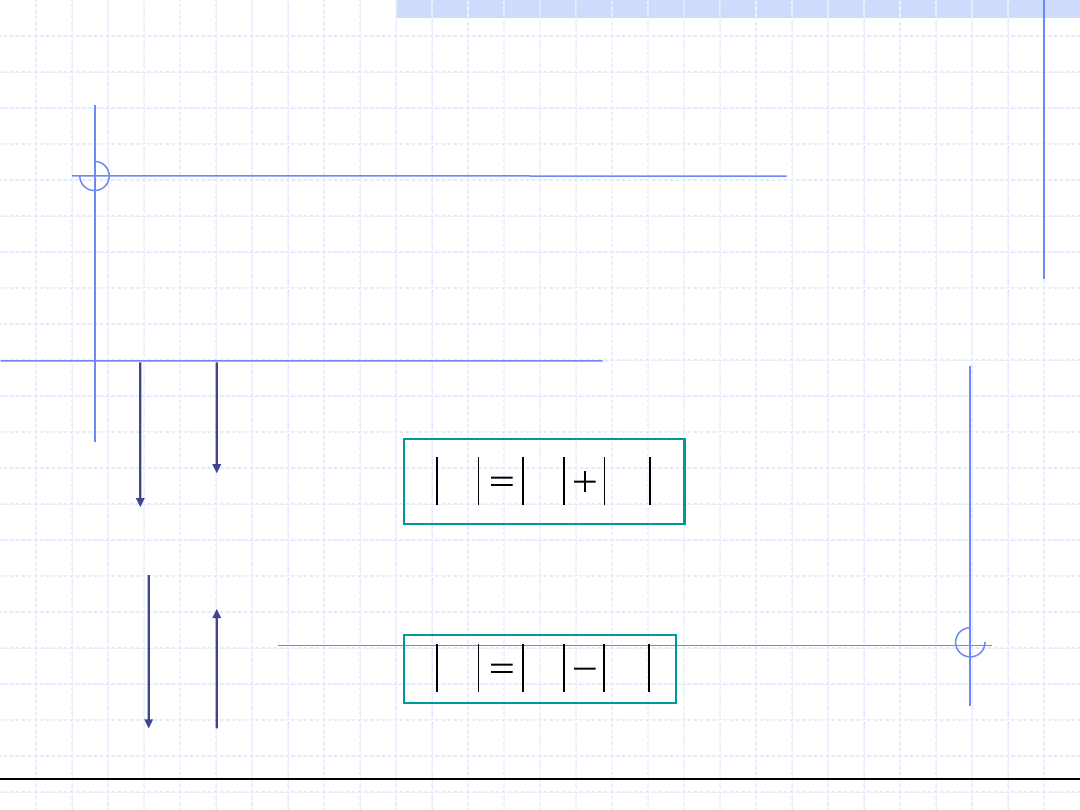
NIEZBIEŻNE UKŁADY SIŁ
Układ sił równoległych
2
1
F
F
W
Układ sił, których linie działania nie przecinają się w jednym punkcie nazywamy niezbieżnym.
Najprostszym niezbieżnym układem jest układ dwu sił równoległych na płaszczyźnie.
Zasadniczym problemem dla takiego układu jest wyznaczenie wypadkowej tzn. jednej siły,
której skutek działania jest taki sam jak danego układu. Wyznaczenie wektora wypadkowej jest
bardzo proste. Rozważmy dwa przypadki, gdy dane siły równoległe są zgodne i przeciwne.
F
1
F
2
F
1
F
2
Wartość wypadkowej jest sumą wartości sił układu. Kierunek i zwrot jest
oczywiście zgodny z kierunkiem i zwrotem sił równoległych.
Wartość wypadkowej jest różnicą wartości siły większej i mniejszej. Kierunek
jest taki sam, natomiast zwrot jest zgodny ze zwrotem siły większej.
W obydwu przypadkach do wyznaczenia pozostaje linia działania wypadkowej.
2
1
F
F
W
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
NIEZBIEŻNE UKŁADY SIŁ
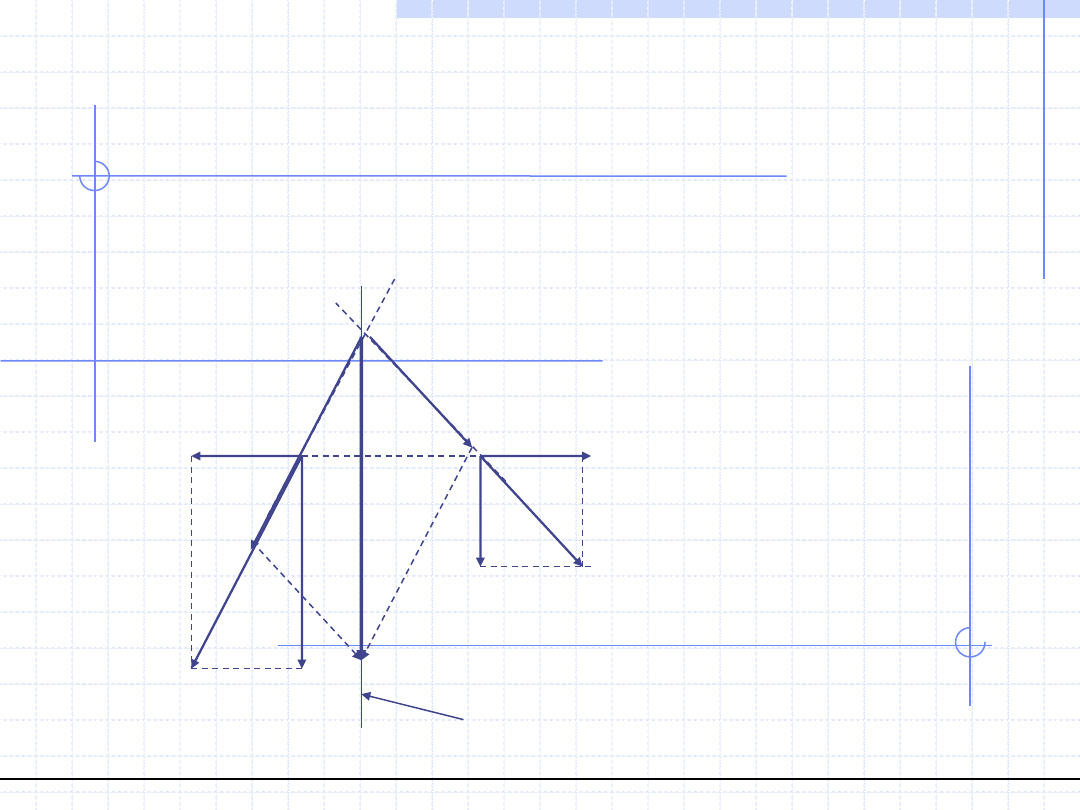
Układ sił równoległych cd.
Linię działania układu sił równoległych można wyznaczyć metodą geometryczną (wykreślną)
i analityczną która wykorzystuje pojęcie momentu siły względem punktu.
Metoda geometryczna oparta jest na III aksjomacie statyki czyli zasadzie układu zerowego.
Na podstawie tego aksjomatu do dowolnego układu można dodać układ zerowy np. dwie równe
siły o przeciwnych zwrotach.
F
1
F
2
S
1
S
2
=-S
1
R
2
R
1
W
W=R
1
+R
2
=F
1
+F
2
Linia działania wypadkowej W
O
K
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
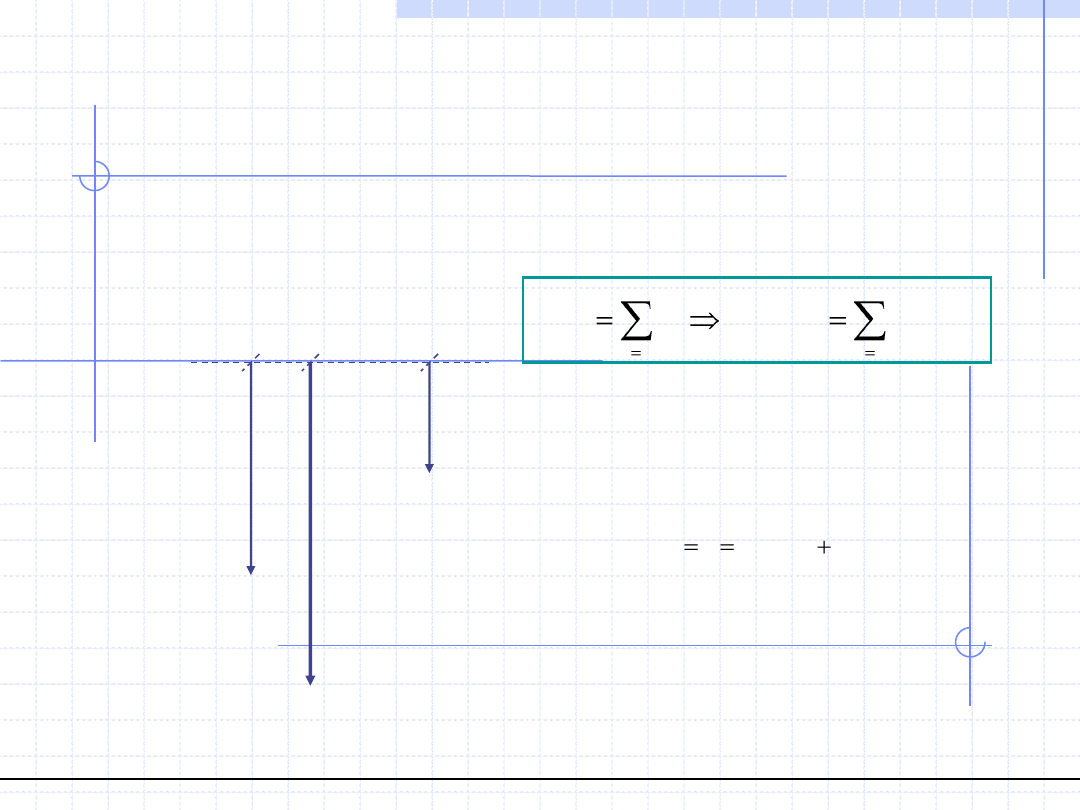
NIEZBIEŻNE UKŁADY SIŁ
Układ sił równoległych cd.
n
i
n
i
i
O
O
i
F
M
W
M
F
W
1
1
)
(
)
(
Metoda analityczna wyznaczania położenia linii działania siły wypadkowej wykorzystuje
tzw. twierdzenie Varignona, które mówi że moment siły wypadkowej dowolnego układ
względem dowolnego punktu O jest równy sumie momentów wszystkich sił układu
względem tego samego punktu O:
F
2
W
F
1
A O B
r
1
r
2
Załóżmy że dane są wartości sił |F
1
| i |F
2
| oraz odległość
ich linii działania czyli długość odcinka AB. Załóżmy że
linia działania wypadkowej układu przechodzi przez punkt O.
Punkt ten wyznacza odcinki r
1
=AO i r
2
=OB. Odcinki te
będziemy nazywać ramieniami sił. Na mocy twierdzenia
Varignona możemy napisać:
)
(
)
(
0
)
(
2
1
F
M
F
M
W
M
O
O
O
Zatem znaki (zwroty) momentów obydwu sił względem
punktu O muszą być przeciwne. Na podstawie dowolnej
reguły określającej zwrot momentów możemy stwierdzić,
że w przypadku gdy zwroty sił są zgodne punkt O musi
leżeć między siłami a w przypadku gdy zwroty są sił
przeciwne punkt O musi leżeć na zewnątrz odcinka AB.
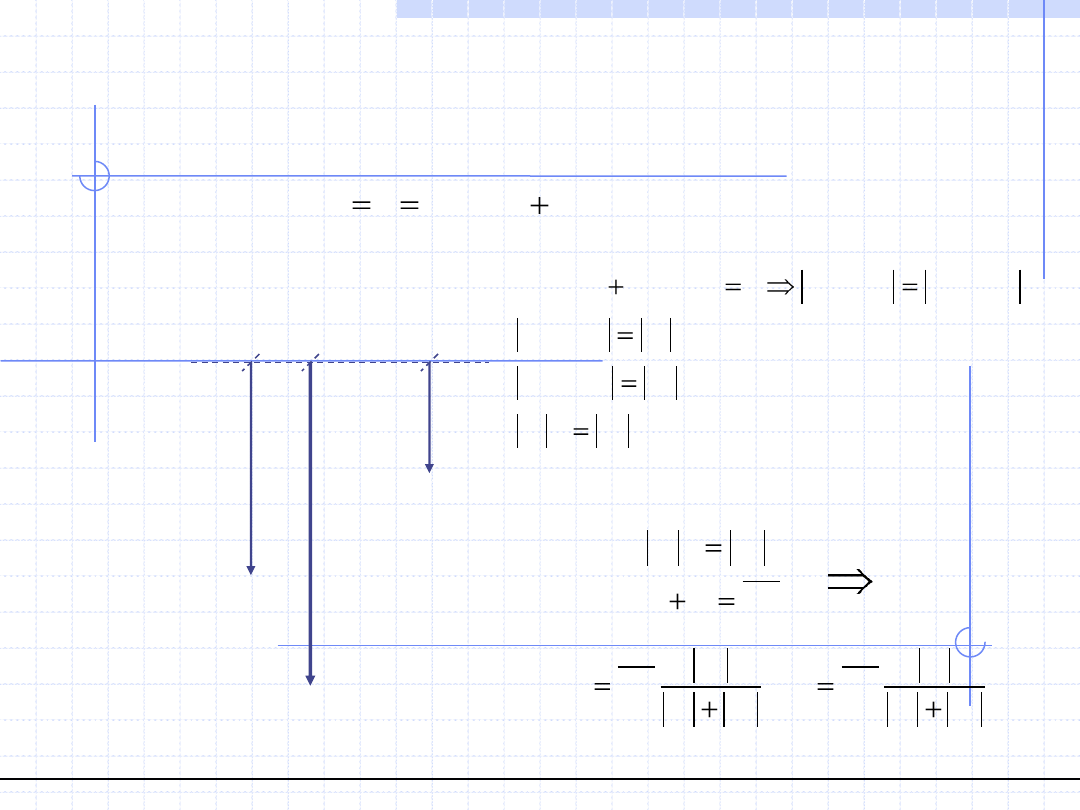
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
NIEZBIEŻNE UKŁADY SIŁ
Układ sił równoległych cd.
)
(
)
(
0
)
(
2
1
F
M
F
M
W
M
O
O
O
F
2
W
F
1
A O B
r
1
r
2
Rozpatrzmy teraz wartości powyższych momentów:
2
2
1
1
2
2
2
1
1
1
2
1
2
1
)
(
)
(
)
(
)
(
0
)
(
)
(
r
F
r
F
r
F
F
M
r
F
F
M
F
M
F
M
F
M
F
M
O
O
O
O
O
O
Ostatnia równość nazywana jest regułą dźwigni.
Wartości r
1
i r
2
możemy otrzymać rozwiązując układ
równań:
AB
r
r
r
F
r
F
2
1
2
2
1
1
2
1
1
2
2
1
2
1
F
F
F
AB
r
F
F
F
AB
r
Podobne wzory można otrzymać dla przypadku, gdy siły mają przeciwne zwroty. Wtedy, wypadkowa
leży na zewnątrz po stronie siły większej.
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
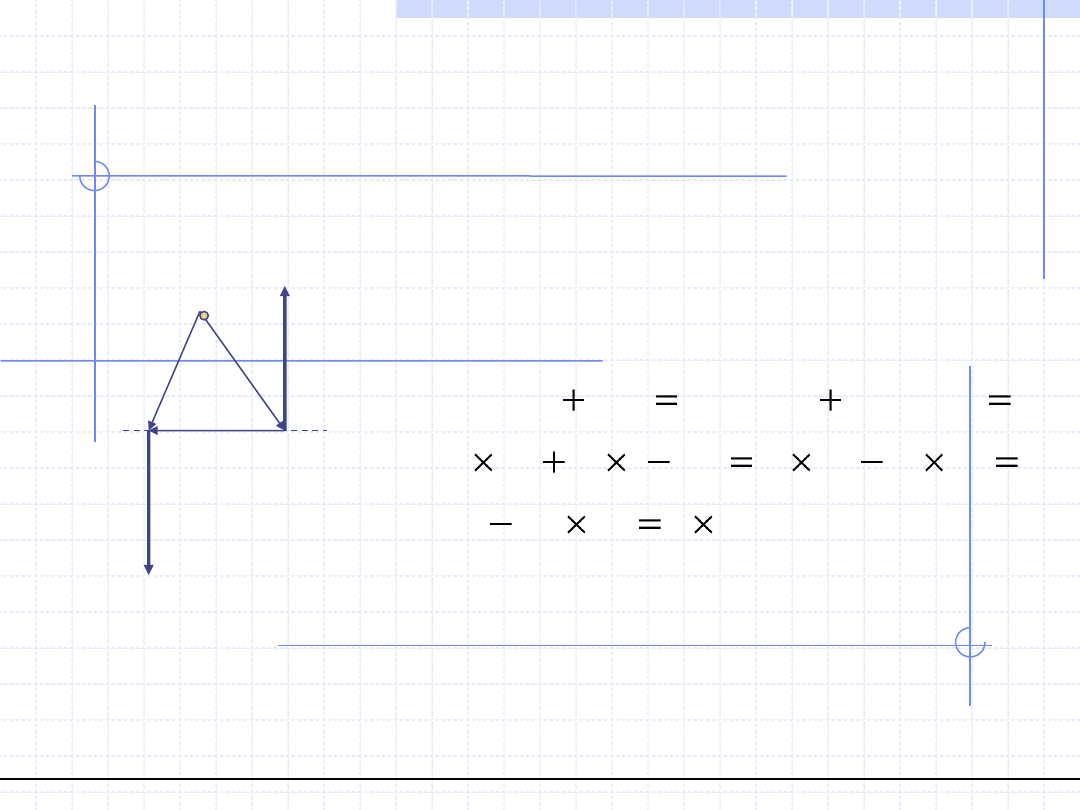
NIEZBIEŻNE UKŁADY SIŁ
Para sił
F
2
=-F
1
F
1
Ważnym pojęciem w statyce jest przypadek sił równoległych o takich samych
wartościach ale przeciwnych zwrotach. Przypadek taki nazywamy parą sił.
Jest oczywiste, że długość wypadkowej pary sił wynosi 0.
Jednakże nieprawdą jest że układ, na który działa para
sił jest zrównoważony. Obliczmy bowiem sumaryczny
moment pary sił względem dowolnego punktu O.
O
r
1
r
2
1
1
2
1
1
2
1
1
1
2
1
1
2
1
2
1
)
(
)
(
)
(
)
(
)
(
F
r
F
r
r
F
r
F
r
F
r
F
r
F
M
F
M
F
F
M
O
O
O
r=r
1
-r
2
Widzimy, że moment pary sił nie jest wektorem zerowym
oraz że nie zależy on od wyboru punktu O. Wektor r
nazywamy ramieniem pary sił.
Zasadniczym skutkiem działania pary sił jest obrót ciała.
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
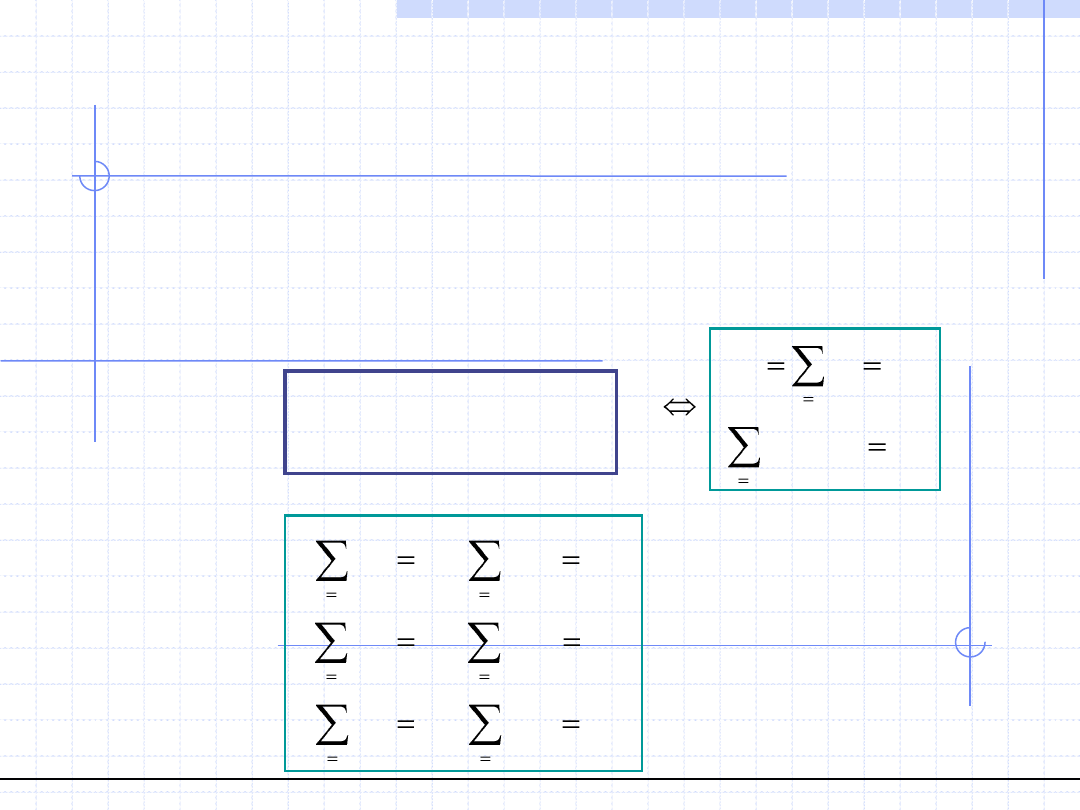
NIEZBIEŻNE UKŁADY SIŁ
Podstawowe twierdzenie statyki
n
i
i
O
n
i
i
F
M
F
W
1
1
0
)
(
0
Kluczowe znaczenie w statyce ma twierdzenie o niezbieżnym układzie sił.
Załóżmy, że siły F
1
, F
2
,…F
n
tworzą niezbieżny układ sił. Układ ten jest w równowadze
statycznej (tzn. nie porusza się lub porusza się ruchem jednostajnym prostoliniowym)
wtedy i tylko wtedy gdy jego wypadkowa jest wektorem zerowym a suma momentów
wszystkich sił względem dowolnego punktu również jest również wektorem zerowym.
Układ F
1
, F
2
,…F
n
jest
w równowadze statycznej
Algebraiczny zapis powyższych warunków jest układem 6-ciu równań dla odpowiednich składowych:
n
i
zi
n
i
yi
n
i
xi
n
i
zi
n
i
yi
n
i
xi
M
M
M
F
F
F
1
1
1
1
1
1
0
0
0
0
0
0
© Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej
Dziękuję bardzo Państwu za uwagę
Wyszukiwarka
Podobne podstrony:
Ogolnotech dla Bio I WYKLAD IV
Ogolnotech dla Bio WYKLAD VI
Ogolnotech(dla Bio I) WYKLAD I
Ogolnotech dla Bio I WYKLAD III
Ogolnotech(dla Bio I) WYKLAD IX
Ogolnotech dla Bio I WYKLAD IV
Ogolnotech dla Bio Ir WYKLAD IX
Ogolnotech(dla Bio Ir) WYKLAD X
Ogolnotech(dla Bio Ir) WYKLAD XI
Ogolnotech dla Bio IV WYKLAD VII
Ogolnotech(dla Bio I) W VI
Ogolnotech(dla Bio I) W X
Ogolnotech(dla Bio I) W VI
więcej podobnych podstron