
1
Wojciech Klityński
Paweł Targosz
Metoda procesów przejściowych
Wstęp
Metoda procesów przejściowych TEM (transient electromagnetic) nazywana
najczęściej TDEM (time-domain electromagnetic method, metoda elektromagnetyczna w
domenie czasu) należy do grupy metod elektromagnetycznych (EM) rozpoznania ośrodka
geoelektrycznego.
Podobnie jak tradycyjna metoda elektrooporowa (DC resistivity) służy do określenia
oporności właściwej ośrodka geologicznego i jest stosowana najczęściej w wersji pionowych
sondowań a rzadziej w wersji profilowań. Metoda TDEM znana jest od kilkudziesięciu lat
jednak wraz z rozwojem techniki, szczególnie elektroniki i komputerowych technik
interpretacyjnych jej efektywność, a co za tym idzie znaczenie w rozpoznaniu ośrodka
geoelektrycznego wzrasta, zwłaszcza, że jest często bardziej efektywna od metody
elektrooporowej. Szczególnie ważne jest to, że metoda ta nie wymaga systemu pomiarowego
o tak dużych rozmiarach jak w metodzie elektrooporowej, gdzie głębokość penetracji zależy
od rozmiaru układu pomiarowego (rozstawu) i jest kilkakrotnie mniejsza od tego rozstawu.
W metodzie procesów przejściowych wykorzystuje się fakt, że pole elektromagnetyczne
ź
ródeł impulsowych w tzw. strefie bliskiej nie zależy od odległości nadajnik-odbiornik
dlatego pomiary może realizować cewka odbiorcza w pętli nadawczej (tzw. central loop) co
daje przewagę w metodyce pomiarowej w stosunku do metod: elektrooporowej czy CSAMT
(Control Source Audio Magnetotelluric), gdzie rozmiary układu pomiarowego dla osiągnięcia
określonego zasięgu głębokościowego muszą być dużo większe (Klityński, Miecznik, 1998).
System pomiarowy w metodzie TDEM składa się z nadajnika i pętli nadawczej (transmitter
loop) i odbiornika (receiver) oraz cewki odbiorczej lub rzadziej pętli odbiorczej.
Głębokość badań w metodzie TDEM wynosi najczęściej od dziesiątków do ok. 1000
metrów (i więcej) i zależy m. in. od rozmiaru pętli nadawczej, mocy nadajnika i poziomu
zakłóceń w obszarze pomiarowym. Głębokość penetracji można zwiększyć nawet do 10 km
stosując specjalną metodykę pomiarową i nadajniki wysokiej mocy (Keller et al., 1984).
Metoda TDEM charakteryzuje się największą poprzeczną i pionową rozdzielczością w
kartowaniu dobrze przewodzących struktur (wśród wszystkich elektromagnetycznych metod
(Krivochieva S., Chouteau M., 2001). Zwykle dokładność pomiaru w tej metodzie jest bardzo
duża (Keller, G.V.,1997).

2
Metoda TDEM ma szerokie zastosowanie m.in. w rozpoznawaniu ośrodka
hydrogeologicznego w tym kartowaniu kontrastu opornościowego wód kwaśnych i
zasolonych z jednej strony a wód słodkich z drugiej strony (Krivochieva S., Chouteau M.,
2001), określaniu geometrii wód podziemnych (Papadopoulos et al., 2004), w kartowaniu
kontrastów opornościowych związanych z występowaniem wód geotermalnych, lokalizacji
skupień rud siarczków charakteryzujących się wysoką przewodnością zlokalizowanych w
ośrodku o niskiej przewodności, w poszukiwaniu struktur dobrze przewodzących związanych
z występowaniem uranu, diamentu i rud metali (Chow-Son Chen and Shuhjong Tsao, 2001),
w kartowaniu struktur geologicznych związanych z występowaniem węgla kamiennego, w
kartowaniu granic pomiędzy zmarzliną a ośrodkiem nie zamarzniętym, w kompleksie z
innymi metodami geofizycznymi: z metodą elektrooporową, z metodą magnetotelluryczną
(Krivochieva S., Chouteau M., 2003) oraz CSAMT i jako dodatkowa z metodą sejsmiczną.
W Polsce metoda TDEM nie została jeszcze zastosowana na szerszą skalę. Zwrócono
jednak uwagę na możliwości jej stosowania w rozpoznaniu morfologii podłoża
prekambryjskiego na Zapadlisku Przedkarpackim (Klityński, Miecznik, 1998). Obszar ten
charakteryzuje się budową tektoniczną typu blokowego, gdzie głębokość zalegania
powierzchni rozgraniczającej miocen od wysokooporowego prekambru jest stosunkowo mała.
Rejon ten budzi zainteresowanie ze względu na możliwości występowania złóż bituminów
zarówno w utworach miocenu jak i prekambru.
Przedstawiono również w Polsce możliwości zastosowania metody procesów
przejściowych w kompleksie z metodą elektrooporową przy monitorowaniu migracji
zanieczyszczeń w warstwie wodonośnej (Antoniuk et al., 1991).
1. Podstawy teoretyczne
Metody elektromagnetyczne wykorzystują sztuczne źródła generujące pole
elektromagnetyczne (oprócz metody magnetotellurycznej - MT), tak więc należą do metod
aktywnych. Wszystkie te metody są metodami powierzchniowymi. System pomiarowy w
metodzie pasywnej (MT) składa się tylko z rejestratora (receiver). Źródło pola MT jest
naturalne i dla częstotliwości od ok. 1 do 10
3
Hz znajduje się w jonosferze, a dla często-
tliwości od 10
-5
do 1 Hz w magnetosferze. W przedziale częstotliwości od. ok. 0.5 do 5 Hz
sygnał jest jednak słabszy co manifestuje się często słabą jakością danych w tym zakresie
częstotliwości (tzw. dead band) (Simpson F., Bahr K., 2005). Głębokość penetracji w
metodzie MT zależy od częstotliwości
(
)
)
(Hz
f
i tzw. uśrednionej oporności ośrodka
3
[ ]
(
)
m
Ω
ρ
(oporności ekwiwalentnej półprzestrzeni dla badanego ośrodka) i może być w
przybliżeniu określona wzorem:
( )
ρ
δ
⋅
≈
T
T
500
(gdzie -
]
[
/
1
sek
f
T
=
). Zasięg
głębokościowy metody MT wynosi więc od kilkudziesięciu metrów do kilkuset km (Simpson
F., Bahr K., 2005).
W przypadku metod aktywnych pole EM jest generowane za pomocą sztucznego
ź
ródła (transmitter). System pomiarowy składa się ze źródła pola EM (pole pierwotne) i
rejestratora wtórnego pola EM. Metody elektromagnetyczne mogą być podzielone na dwie
grupy: FDEM (frequency-domain electromagnetic, metoda elektromagnetyczna w domenie
częstotliwości)
oraz
TDEM
(time-domain
electromagnetic
method,
metoda
elektromagnetyczna w domenie czasu). W metodach FDEM zmiana prądu źródłowego w
czasie ma charakter quasisinusoidalny. W takim przypadku głębokość penetracji zależy od
częstotliwości fali EM
( )
f
f
ρ
δ
⋅
≈
500
i oporności uśrednionej ośrodka
[ ]
(
)
m
Ω
ρ
. Zasięg
głębokościowy w metodzie FDEM jest jednak mniejszy niż w przypadku metody MT i
wynosi od kilku do kilkuset (i więcej) metrów (Kauffann A.A., Keller G.V, 1983).
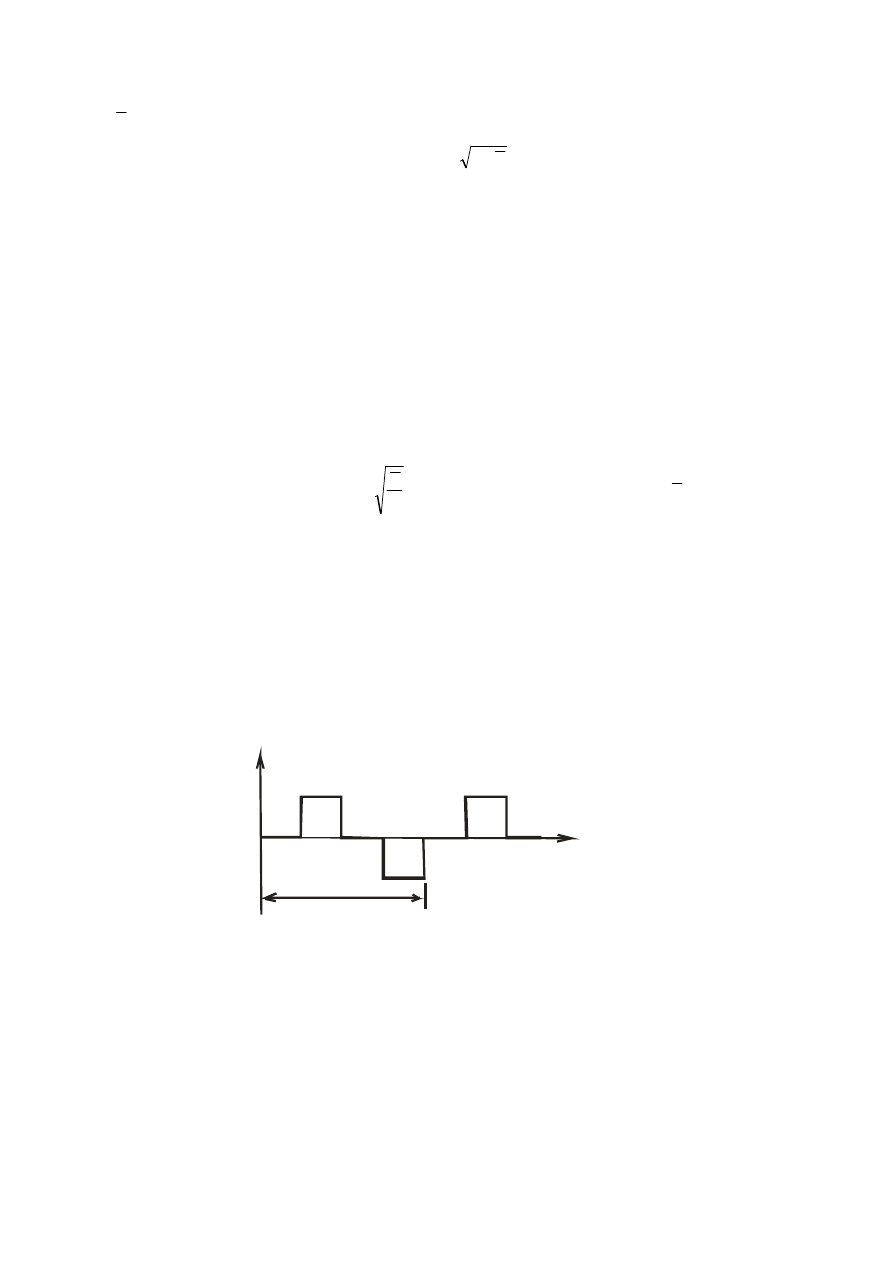
W metodzie TDEM prąd źródłowy (okresowy) ma najczęściej symetryczny kształt
prostokątny. Po każdej drugiej ćwiartce okresu prąd jest gwałtownie redukowany do zera
(rys. 1), a głębokość penetracji zależy od czasu jaki upłynął od wyłączenia prądu w pętli
nadawczej (Keller G.V., 1997).
T/4
T/4
T/4
T/4
T/4
T=okres
zwykle ok. 1 msec
Prąd pętli nadawczej
(zwykle kilka Amperów)
Rys. 1. Postać prądu pętli nadawczej w metodzie TDEM
Metody elektromagnetyczne to metody w których generowane są zmienne w czasie
prądy elektryczne w ziemi. Penetrację ośrodka geologicznego umożliwia wykorzystanie
zjawiska indukcji elektromagnetycznej. Zmienne w czasie pole magnetyczne jest wytwarzane
na powierzchni ziemi przy użyciu cewki (coil) albo pętli (loop) czyli przewodników
odpowiednio ukształtowanych (kabli przewodzących) umieszczonych na powierzchni ziemi.
4
Najczęściej stosowana jest jednak pętla nadawcza o kształcie kwadratu (o boku L[m]).
Odbiornik
stanowi
najczęściej
cewka
odbiorcza.
Podstawowym założeniem metod EM jest spełnienie równań Maxwella:
Prawo Gaussa:
η
=
⋅
∇
D
r
(źródłem pola elektrycznego są ładunki)
Prawo Faradya:
t
B
E
∂
∂
−
=
×
∇
r
r
(zmienne w czasie
( )
t
pole magnetyczne
( )
B
r
wytwarza wirowe pole elektryczne
( )
E
r
)
Prawo Gaussa dla pola
magnetycznego:
0
=
⋅
∇
B
r
(pole magnetyczne jest bezźródłowe)
Prawo Ampere’a
Maxwella:
t
D
j
H
∂
∂
+
=
×
∇
r
r
r
(przepływający prąd (
−
j
r
gęstość prądu) oraz
zmienne pole elektryczne wytwarzają wirowe pole
magnetyczne)
gdzie:
D
r
- indukcja elektryczna
[
]
2
/
m
C
,
B
v
- indukcja magnetyczna
[ ]
T
,
E
r
- natężenie pola elektrycznego
[
]
m
V
/
,
H
r
- natężenie pola magnetycznego
[
]
m
A
/
,
j
r
- gęstość prądu
[
]
2
/
m
A
,
η
- gęstość ładunku
[
]
3
/
m
C
,
⋅
∇
- operator dywergencji,
×
∇
- operator rotacji.
W ośrodkach liniowych:
E
D
r
r
⋅
=
ε
a
H
B
r
r
⋅
=
µ
gdzie:
ε
- przenikalność elektryczna,
µ
przenikalność magnetyczna.
Równania Maxwella mogą być sprowadzone do równań falowych dla pola
elektrycznego
( )
E
r
i magnetycznego
( )
H
r
:
0
2
2
2
=
∂
∂
−
∂
∂
−
∇
t
E
t
E
E
r
r
r
µε
µσ
oraz
5
0
2
2
2
=
∂
∂
−
∂
∂
−
∇
t
H
t
H
H
r
r
r
µε
µσ
x
z
y
Rys. 2. Kartezjański układ współrzędnych
Dla warstwowanej półprzestrzeni
( )
z
ρ
ρ
=
i w układzie Kartezjańskim (ośrodek 1D):
0
2
2
2
2
=
∂
∂
−
∂
∂
−
∂
∂
t
H
t
H
z
H
x
x
x
µε
µσ
Dla pól harmonicznie zmiennych (założenie metod EM w domenie częstotliwości):
t
i
x
x
e
z
H
H
ω
ω
−
⋅
=
)
,
(
gdzie
f
π
ω
2
=
- częstość pola, powyższe równanie można przekształcić
do postaci:
0
1
2
2
=
⋅
−
+
x
x
H
i
i
dz
H
d
σ
ωε
ωµσ
Dla metod EM (niskie częstotliwości):
1
/
<<
σ
ωε
(zachowanie fali EM w
przewodniku) pozostaje tylko składnik
t
∂
∂
stąd otrzymujemy tzw. równanie dyfuzji:
0
2
2
=
∂
∂
−
∂
∂
t
H
z
H
x
x
µσ
lub dla pól harmonicznie zmiennych
0
2
2
=
⋅
+
x
x
H
i
dz
H
d
ωµσ
.
Jak widać transport energii w metodach EM jest rządzony dyfuzją, a nie propagacją
falową.
Zgodnie z prawem Faradaya zmienne pole magnetyczne generuje zmienne pole
elektryczne, które z kolei wytwarza prąd elektryczny. W związku z tym w metodach EM
pierwotne zmienne pole magnetyczne wytwarza wtórne prądy elektryczne wewnątrz Ziemi.
Wielkość tych wtórnych prądów wyidukowanych w Ziemi zależy od rozkładu przewodności
elektrycznej
=
ρ
σ
1
[
]
m
mS /
penetrowanego ośrodka. Rejestrator służy do pomiaru
zmiennego pola magnetycznego wytworzonego przez wtórne prądy elektryczne.
6
Jak
wcześniej
wyjaśniono
najważniejszym
zjawiskiem
w
metodach
elektromagnetycznych jest zjawisko indukcji i rządzi nimi równanie dyfuzji.
To decyduje o rozdzielczości metod EM, która nie jest tak duża jak w przypadku
metody sejsmicznej, gdzie decydującą rolę odgrywają zjawiska falowe (równanie falowe). To
również decyduje o zasięgu głębokościowym metod EM określonym przez tzw. efekt
naskórkowy (skin effect). Zasięg głębokościowy jest tutaj określony przez tzw. głębokość dla
skin efektu:
σ
σ
ωµ
δ
⋅
≈
=
f
o
503
2
gdzie
[ ]
Hz
f
to częstotliwość pola EM,
f
⋅
⋅
=
π
ω
2
to
częstość pola EM a
[
]
m
H
o
/
10
4
7
−
⋅
⋅
=
π
µ
to przenikalność magnetyczna próżni z kolei
[
]
1
−
Ω
m
σ
to przewodność właściwa ośrodka (Nagendra Pratap Singh and Toru Mogi, 2003).
W metodzie procesów przejściowych (TDEM) pole elektromagnetyczne jest
generowane przez impuls prądowy lub sygnał przejściowy wzdłuż kabla rozłożonego na
powierzchni ziemi (pętla nadawcza). To generuje zmienne pole magnetyczne wewnątrz ziemi.
Początkowo indukowany prąd koncentruje się bezpośrednio pod powierzchnią ziemi poniżej
pętli nadawczej. Potem dyfunduje w czasie w dół (rys. 3). Tak więc zasięg pola EM się
powiększa, następuje jednak tłumienie, które jest coraz większe w miarę przesuwania się w
głąb Ziemi. „Tempo” dyfuzji zależy od przewodności ośrodka. W wysokooporowym ośrodku
tempo dyfuzji jest szybkie. W przewodzącym ośrodku prąd dyfunduje wolniej. Zmiennemu
polu elektrycznemu wyidukowanemu z którym związane są prądy wirowe zgodnie z
równaniami Maxwella towarzyszy zmienne pole magnetyczne. Pole magnetyczne „wraca” na
powierzchnię ziemi „niosąc ze sobą informację” o rozkładzie przewodności tego ośrodka.
Wtórne zmienne pole magnetyczne pochodzące od wtórnych prądów wirowych
rozprzestrzenia się wolno w porównaniu z tempem ustalania się pierwotnego pola
magnetycznego.
(a)
(b)
(c)
(d)
(a) zaraz po wł
ą
czeniu
(b) (c) (d) stopniowo (po czasie)
Rys. 3 Zachowanie prądu przejściowego w Ziemi
7
W metodzie procesów przejściowych mierzone jest wtórne pole magnetyczne i czas
opóźnienia (t), czyli czas jaki upłynął od wyłączenia prądu w pętli nadawczej (Keller,
G.V.,1997). Geometria rozkładu przewodności, a więc głębokość i przewodność, są
odzwierciedlone przez wartości wtórnego pola magnetycznego. Głębokość penetracji zgodnie
z zasadą dyfuzji zależy od oporności i czasu (t). Tak więc nie ma teoretycznie limitu na tę
głębokość. Praktyczny limit jest jednak podyktowany najmniejszą możliwą do zmierzenia
amplitudą sygnału. Zasięg głębokościowy zależy więc od geometrii układu pomiarowego (w
tym rozmiaru pętli nadawczej), wielkości mocy użytej w pętli nadawczej, czułości odbiornika
i panujących w otoczeniu zakłóceń i może wynieść od kilku metrów do około tysiąca metrów,
a dla specjalnych źródeł nawet do 10 km (Keller G.V. et al., 1984).
Zasięg głębokościowy w metodzie TDEM zależy od czasu (t[s]) (jego maksymalna
wartość) i od średniej oporności ośrodka
[ ]
(
)
m
Ω
ρ
:
( )
[ ]
m
t
2
/
1
3
.
503
ρ
δ
⋅
⋅
=
(Parasnis, 1986).
Z kolei wg danych firmy Phoenix zasięg głębokościowy wynosi: D=
[ ]
ms
t
⋅
⋅
ρ
500
[m].
Maksymalny czas dla którego poziom sygnału jest wystarczający do jego rejestracji
zależy od rozmiaru pętli nadajnika, mocy źródła oraz poziomu zakłóceń. Tak więc zasięg
głębokościowy bezpośrednio zależy od czasu (t) jaki upływa od wyłączenia prądu w pętli
nadawczej, a pośrednio od w/w czynników. Poziom zakłóceń ( Nm ) wynosi zwykle od
8
10
−
do
10
10
−
[V/m]. Maksymalny czas rejestracji możemy wyznaczyć z wzoru:
(
)
(
)
5
/
1
3
2
400
/
⋅
⋅
⋅
=
a
t
o
Nm
M
t
ρ
π
µ
[s] (wg danych firmy Phoenix), gdzie
t
M to moment nadajnika =
2
L
I
⋅
[Am
2
],
I to prąd pętli nadawczej [Amper], L to długość pętli nadawczej [metr] a
a
ρ
to oporność ośrodka
[ ]
m
Ω
. Zakładając rozmiary pętli nadawczej (
L
L
×
[m
2
]) wynoszące:
10
10
×
,
20
20
×
,
40
40
×
,
100
100
×
oraz
300
300
×
[m
2]
oraz trzy możliwe poziomy
zakłóceń:
8
10
−
=
Nm
[V/m
2
] ,
9
10
−
=
Nm
[V/m
2
],
10
10
−
=
Nm
[V/m
2
] obliczamy czas
ostatniego rejestrowanego sygnału oraz odpowiadający zasięg głębokościowy (D=
[ ]
ms
t
a
⋅
⋅
ρ
500
[m]) (patrz tabele niżej).
8
Tabela 1. Czas ostatniego rejestrowanego sygnału dla
10
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
10
10
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
100
5
×
15,12
8,72
5,76
3,80
2,19
1,45
100
10
×
19,95
11,51
7,59
5,01
2,89
1,91
100
20
×
*
26,32
15,19
10,02
6,61
3,82
2,52
100
40
×
*
34,73
20,04
13,22
8,72
5,03
3,32
100
50
×
37,97
21,91
14,46
9,54
5,50
3,63
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 2. Zasięg głębokościowy (D) dla
10
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
10
10
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
100
5
×
122,95
147,68
169,64
194,86
234,06
268,86
100
10
×
141,23
169,64
194,86
223,84
268,86
308,84
100
20
×
*
162,24
194,86
223,84
257,13
308,84
354,76
100
40
×
*
186,36
223,84
257,13
295,36
354,76
407,52
100
50
×
194,86
234,06
268,86
308,84
370,95
426,11
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 3. Czas ostatniego rejestrowanego sygnału dla
9
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
10
10
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
100
5
×
6,02
3,47
2,29
1,51
0,87
0,58
100
10
×
7,94
4,58
3,02
1,99
1,15
0,76
100
20
×
*
10,48
6,05
3,99
2,63
1,52
1,00
100
40
×
*
13,83
7,98
5,26
3,47
2,00
1,32
100
50
×
15,12
8,72
5,76
3,80
2,19
1,45
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
9
Tabela 4. Zasięg głębokościowy (D) dla
9
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
10
10
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
100
5
×
77,58
93,18
107,04
122,95
147,68
169,64
100
10
×
89,11
107,04
122,95
141,23
169,64
194,86
100
20
×
*
102,36
122,95
141,23
162,24
194,86
223,84
100
40
×
*
117,58
141,23
162,24
186,36
223,84
257,13
100
50
×
122,95
147,68
169,64
194,86
234,06
268,86
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 5. Czas ostatniego rejestrowanego sygnału dla
8
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
10
10
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
100
5
×
2,40
1,38
0,91
0,60
0,35
0,23
100
10
×
3,16
1,82
1,20
0,79
0,46
0,30
100
20
×
*
4,17
2,41
1,59
1,05
0,60
0,40
100
40
×
*
5,50
3,18
2,10
1,38
0,80
0,53
100
50
×
6,02
3,47
2,29
1,51
0,87
0,58
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 6. Zasięg głębokościowy dla
8
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
10
10
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
100
5
×
48,95
58,79
67,53
77,58
93,18
107,04
100
10
×
56,23
67,53
77,58
89,11
107,04
122,95
100
20
×
*
64,59
77,58
89,11
102,36
122,95
141,23
100
40
×
*
74,19
89,11
102,36
117,58
141,23
162,24
100
50
×
77,58
93,18
107,04
122,95
147,68
169,64
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
10
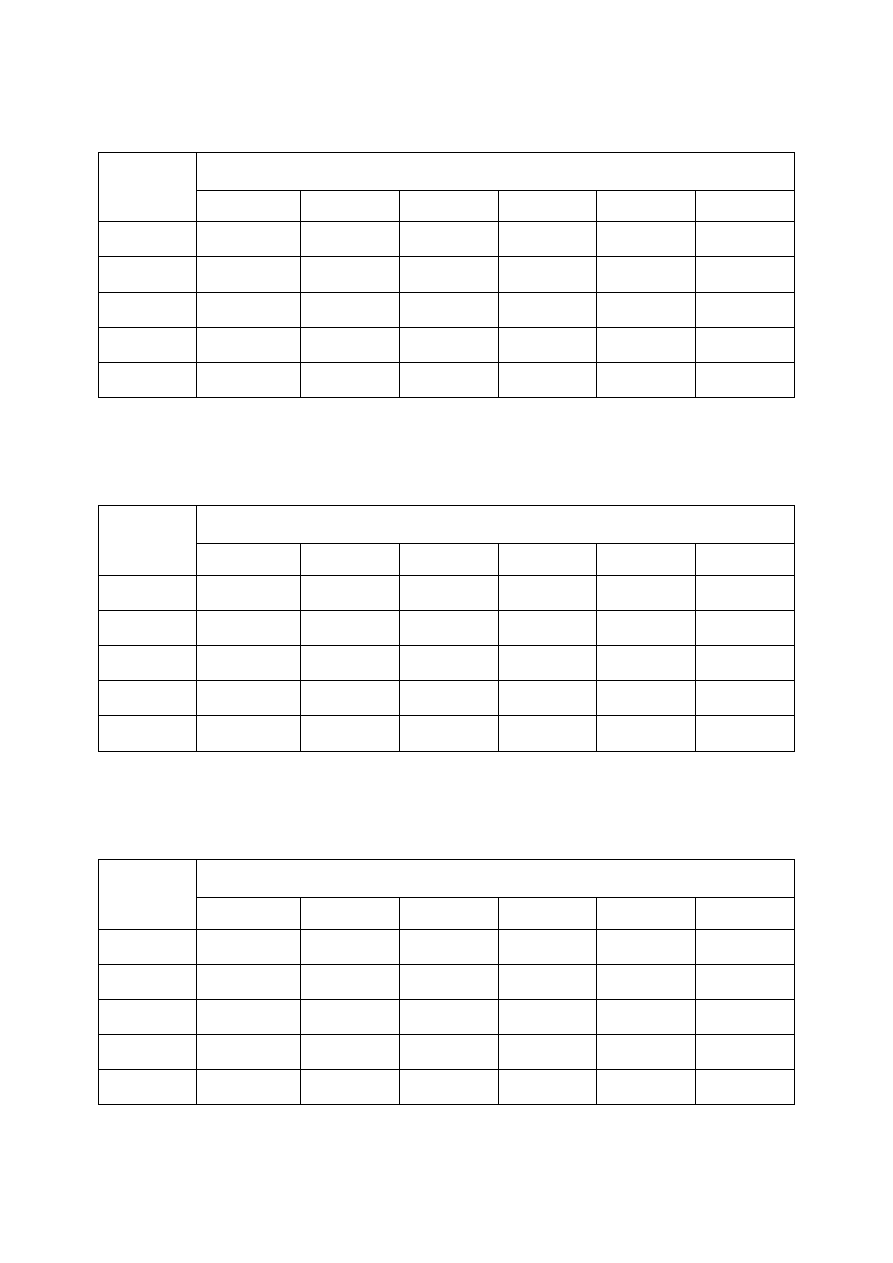
Tabela 7. Czas ostatniego rejestrowanego sygnału dla
10
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
20
20
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
400
5
×
26,32
15,19
10,02
6,61
3,82
2,52
400
10
×
34,73
20,04
13,22
8,72
5,03
3,32
400
20
×
*
45,83
26,45
17,45
11,51
6,64
4,38
400
40
×
*
60,47
34,89
23,02
15,19
8,77
5,78
400
50
×
66,11
38,15
25,17
16,61
9,58
6,32
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 8. Zasięg głębokościowy (D) dla
10
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
20
20
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
400
5
×
162,24
194,86
223,84
257,13
308,84
354,76
400
10
×
186,36
223,84
257,13
295,36
354,76
407,52
400
20
×
*
214,07
257,13
295,36
339,28
407,52
468,11
400
40
×
*
245,90
295,36
339,28
389,73
468,11
537,72
400
50
×
257,13
308,84
354,76
407,52
489,48
562,26
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
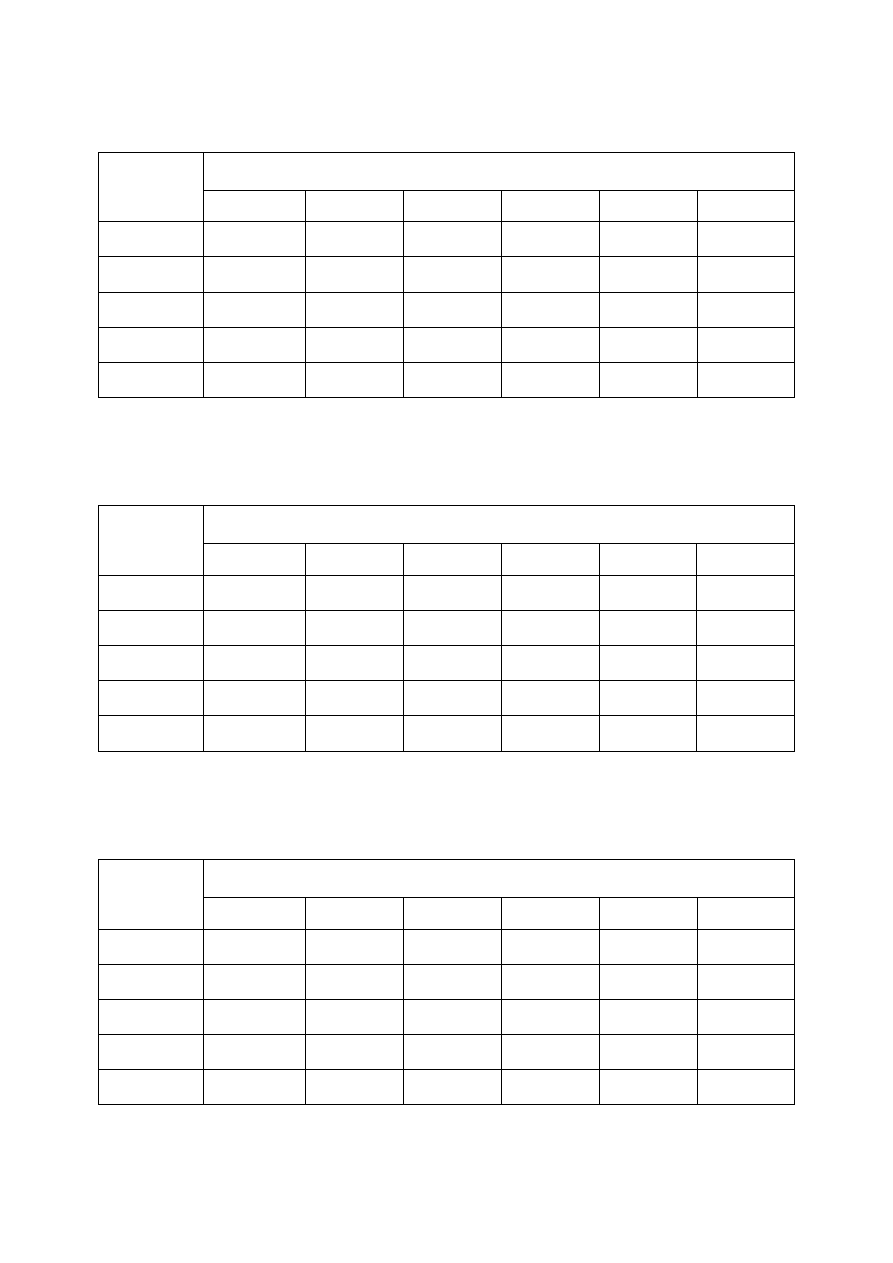
Tabela 9. Czas ostatniego rejestrowanego sygnału dla
9
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
20
20
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
400
5
×
10,48
6,05
3,99
2,63
1,52
1,00
400
10
×
13,83
7,98
5,26
3,47
2,00
1,32
400
20
×
*
18,24
10,53
6,95
4,58
2,64
1,74
400
40
×
*
24,07
13,89
9,17
6,05
3,49
2,30
400
50
×
26,32
15,19
10,02
6,61
3,82
2,52
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
11
Tabela 10. Zasięg głębokościowy (D) dla
9
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
20
20
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
400
5
×
102,36
122,95
141,23
162,24
194,86
223,84
400
10
×
117,58
141,23
162,24
186,36
223,84
257,13
400
20
×
*
135,07
162,24
186,36
214,07
257,13
295,36
400
40
×
*
155,15
186,36
214,07
245,90
295,36
339,28
400
50
×
162,24
194,86
223,84
257,13
308,84
354,76
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
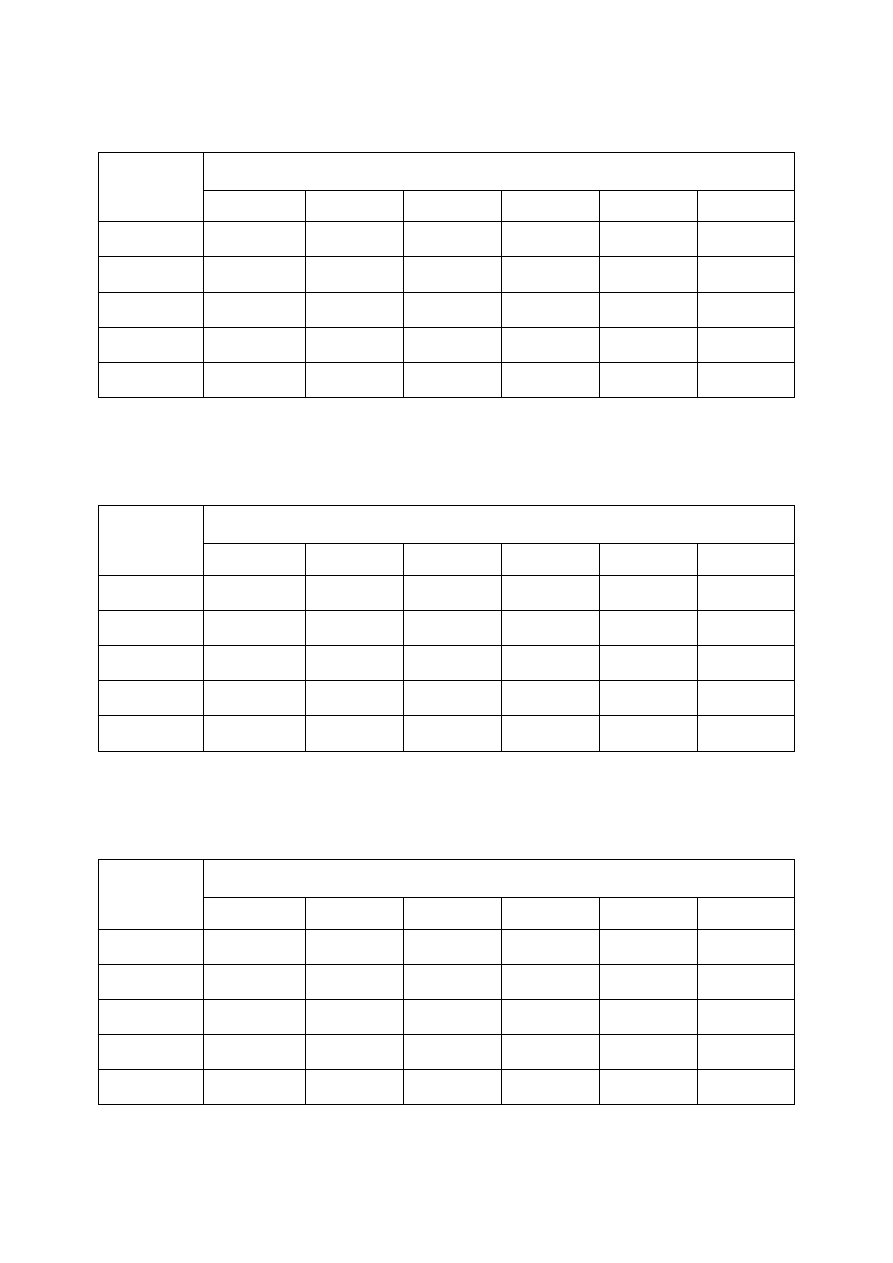
Tabela 11. Czas ostatniego rejestrowanego sygnału dla
8
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
20
20
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
400
5
×
4,17
2,41
1,59
1,05
0,60
0,40
400
10
×
5,50
3,18
2,10
1,38
0,80
0,53
400
20
×
*
7,26
4,19
2,77
1,82
1,05
0,69
400
40
×
*
9,58
5,53
3,65
2,41
1,39
0,92
400
50
×
10,48
6,05
3,99
2,63
1,52
1,00
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 12. Zasięg głębokościowy (D) dla
8
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
20
20
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
400
5
×
64,59
77,58
89,11
102,36
122,95
141,23
400
10
×
74,19
89,11
102,36
117,58
141,23
162,24
400
20
×
*
85,22
102,36
117,58
135,07
162,24
186,36
400
40
×
*
97,90
117,58
135,07
155,15
186,36
214,07
400
50
×
102,36
122,95
141,23
162,24
194,86
223,84
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
12
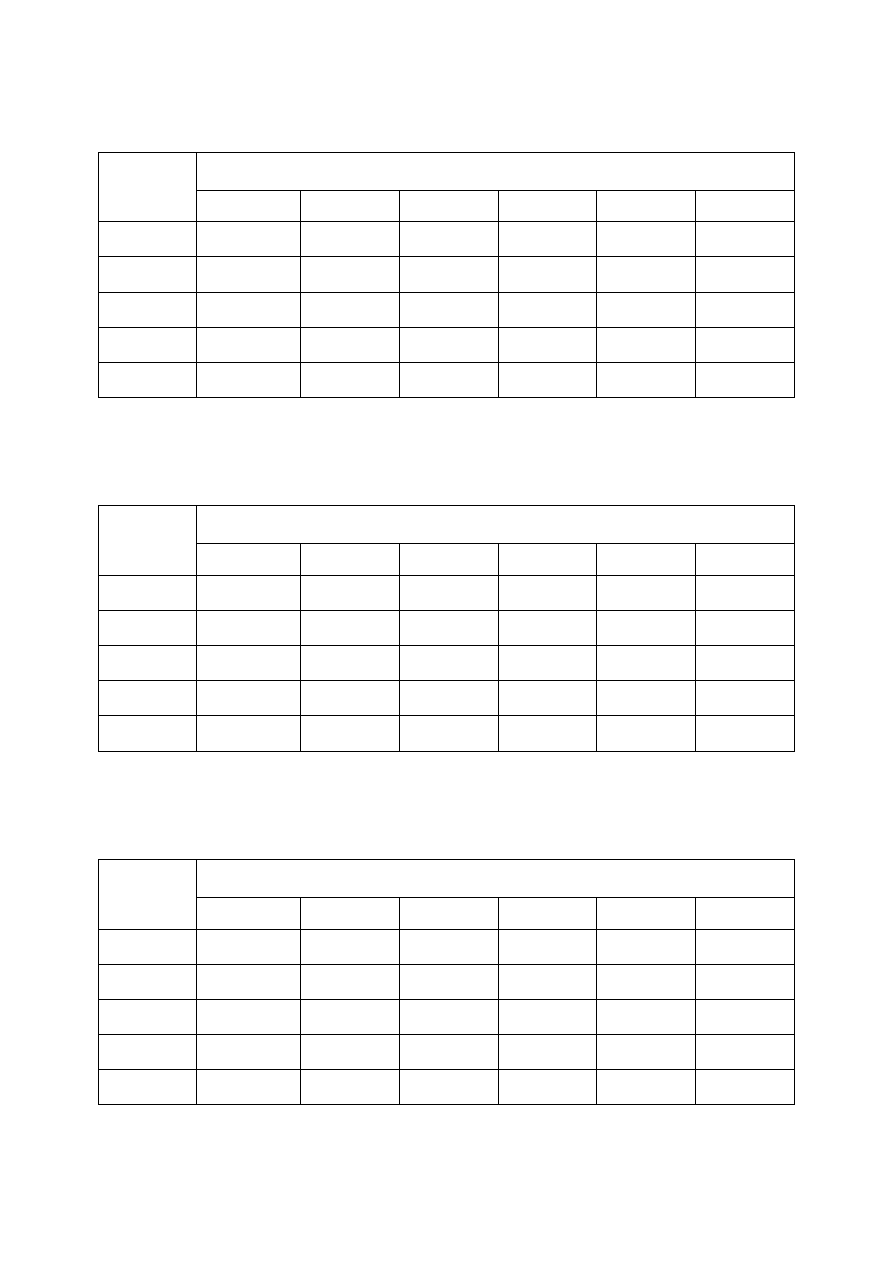
Tabela 13. Czas ostatniego rejestrowanego sygnału dla
10
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
40
40
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
1600
5
×
45,83
26,45
17,45
11,51
6,64
4,38
1600
10
×
60,47
34,89
23,02
15,19
8,77
5,78
1600
20
×
*
79,79
46,04
30,38
20,04
11,57
7,63
1600
40
×
*
105,28
60,76
40,08
26,45
15,26
10,07
1600
50
×
115,11
66,43
43,83
28,91
16,69
11,01
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 14. Zasięg głębokościowy (D) dla
10
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
40
40
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
1600
5
×
214,07
257,13
295,36
339,28
407,52
468,11
1600
10
×
245,90
295,36
339,28
389,73
468,11
537,72
1600
20
×
*
282,47
339,28
389,73
447,68
537,72
617,68
1600
40
×
*
324,47
389,73
447,68
514,25
617,68
709,53
1600
50
×
339,28
407,52
468,11
537,72
645,87
741,91
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 15. Czas ostatniego rejestrowanego sygnału dla
9
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
40
40
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
1600
5
×
18,24
10,53
6,95
4,58
2,64
1,74
1600
10
×
24,07
13,89
9,17
6,05
3,49
2,30
1600
20
×
*
31,76
18,33
12,09
7,98
4,60
3,04
1600
40
×
*
41,91
24,19
15,96
10,53
6,08
4,01
1600
50
×
45,83
26,45
17,45
11,51
6,64
4,38
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
13
Tabela 16. Zasięg głębokościowy (D) dla
9
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
40
40
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
1600
5
×
135,07
162,24
186,36
214,07
257,13
295,36
1600
10
×
155,15
186,36
214,07
245,90
295,36
339,28
1600
20
×
*
178,23
214,07
245,90
282,47
339,28
389,73
1600
40
×
*
204,73
245,90
282,47
324,47
389,73
447,68
1600
50
×
214,07
257,13
295,36
339,28
407,52
468,11
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 17. Czas ostatniego rejestrowanego sygnału dla
8
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
40
40
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
1600
5
×
7,26
4,19
2,77
1,82
1,05
0,69
1600
10
×
9,58
5,53
3,65
2,41
1,39
0,92
1600
20
×
*
12,65
7,30
4,81
3,18
1,83
1,21
1600
40
×
*
16,69
9,63
6,35
4,19
2,42
1,60
1600
50
×
18,24
10,53
6,95
4,58
2,64
1,74
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 18. Zasięg głębokościowy (D) dla
8
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
40
40
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
1600
5
×
85,22
102,36
117,58
135,07
162,24
186,36
1600
10
×
97,90
117,58
135,07
155,15
186,36
214,07
1600
20
×
*
112,45
135,07
155,15
178,23
214,07
245,90
1600
40
×
*
129,17
155,15
178,23
204,73
245,90
282,47
1600
50
×
135,07
162,24
186,36
214,07
257,13
295,36
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
14
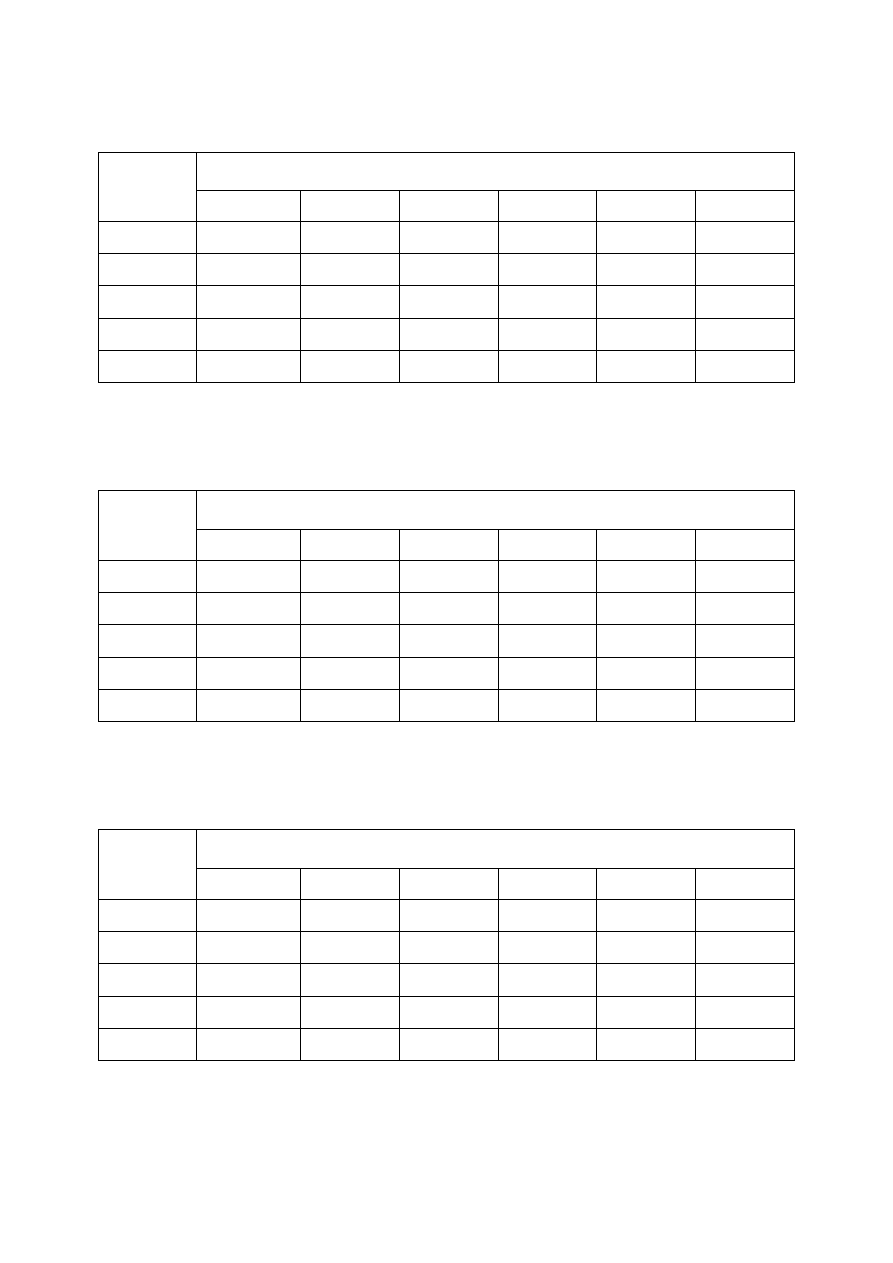
Tabela 19. Czas ostatniego rejestrowanego sygnału dla
10
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
100
100
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
5
×
95,38
55,04
36,31
23,96
13,83
9,12
4
10
10
×
125,86
72,63
47,92
31,61
18,24
12,04
4
10
20
×
*
166,07
95,84
63,23
41,71
24,07
15,88
4
10
40
×
*
219,13
126,46
83,43
55,04
31,76
20,96
4
10
50
×
239,59
138,26
91,22
60,18
34,73
22,91
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 20. Zasięg głębokościowy (D) dla
10
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
100
100
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
5
×
308,84
370,95
426,11
489,48
587,92
675,35
4
10
10
×
354,76
426,11
489,48
562,26
675,35
775,77
4
10
20
×
*
407,52
489,48
562,26
645,87
775,77
891,13
4
10
40
×
*
468,11
562,26
645,87
741,91
891,13
1023,63
4
10
50
×
489,48
587,92
675,35
775,77
931,80
1070,35
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
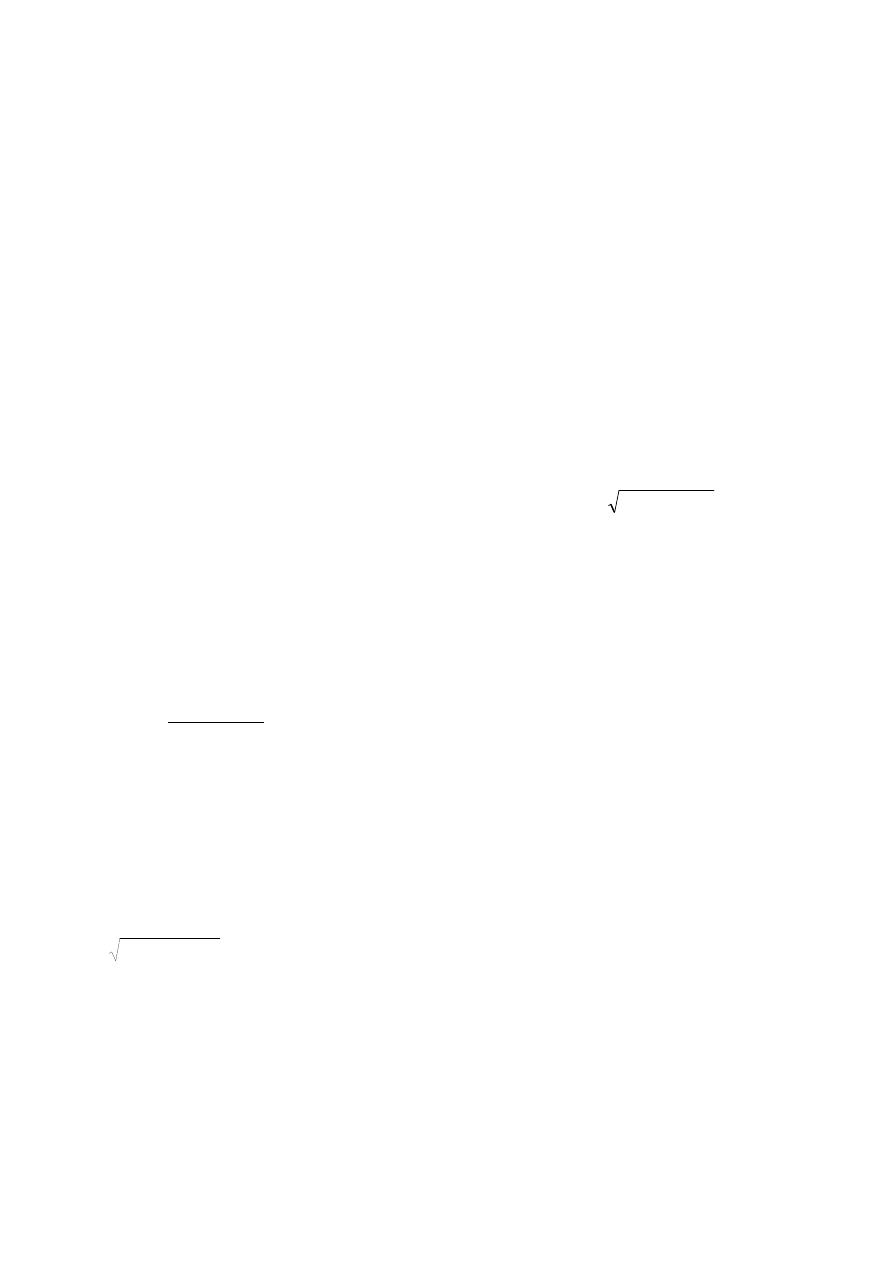
Tabela 21. Czas ostatniego rejestrowanego sygnału dla
9
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
100
100
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
5
×
37,97
21,91
14,46
9,54
5,50
3,63
4
10
10
×
50,10
28,91
19,08
12,59
7,26
4,79
4
10
20
×
*
66,11
38,15
25,17
16,61
9,58
6,32
4
10
40
×
*
87,24
50,34
33,21
21,91
12,65
8,34
4
10
50
×
95,38
55,04
36,31
23,96
13,83
9,12
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
15
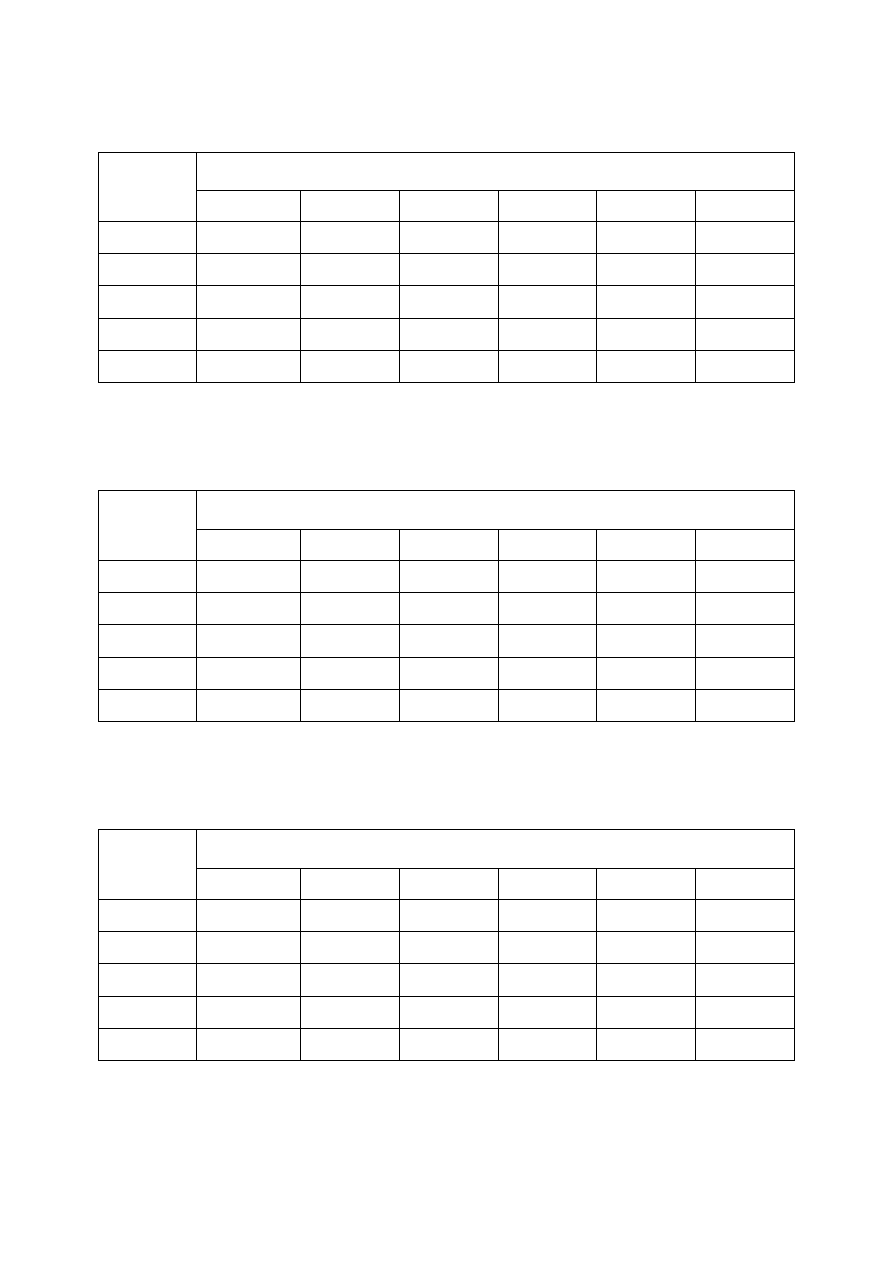
Tabela 22. Zasięg głębokościowy (D) dla
9
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
100
100
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
5
×
194,86
234,06
268,86
308,84
370,95
426,11
4
10
10
×
223,84
268,86
308,84
354,76
426,11
489,48
4
10
20
×
*
257,13
308,84
354,76
407,52
489,48
562,26
4
10
40
×
*
295,36
354,76
407,52
468,11
562,26
645,87
4
10
50
×
308,84
370,95
426,11
489,48
587,92
675,35
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 23. Czas ostatniego rejestrowanego sygnału dla
8
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
100
100
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
5
×
15,12
8,72
5,76
3,80
2,19
1,45
4
10
10
×
19,95
11,51
7,59
5,01
2,89
1,91
4
10
20
×
*
26,32
15,19
10,02
6,61
3,82
2,52
4
10
40
×
*
34,73
20,04
13,22
8,72
5,03
3,32
4
10
50
×
37,97
21,91
14,46
9,54
5,50
3,63
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
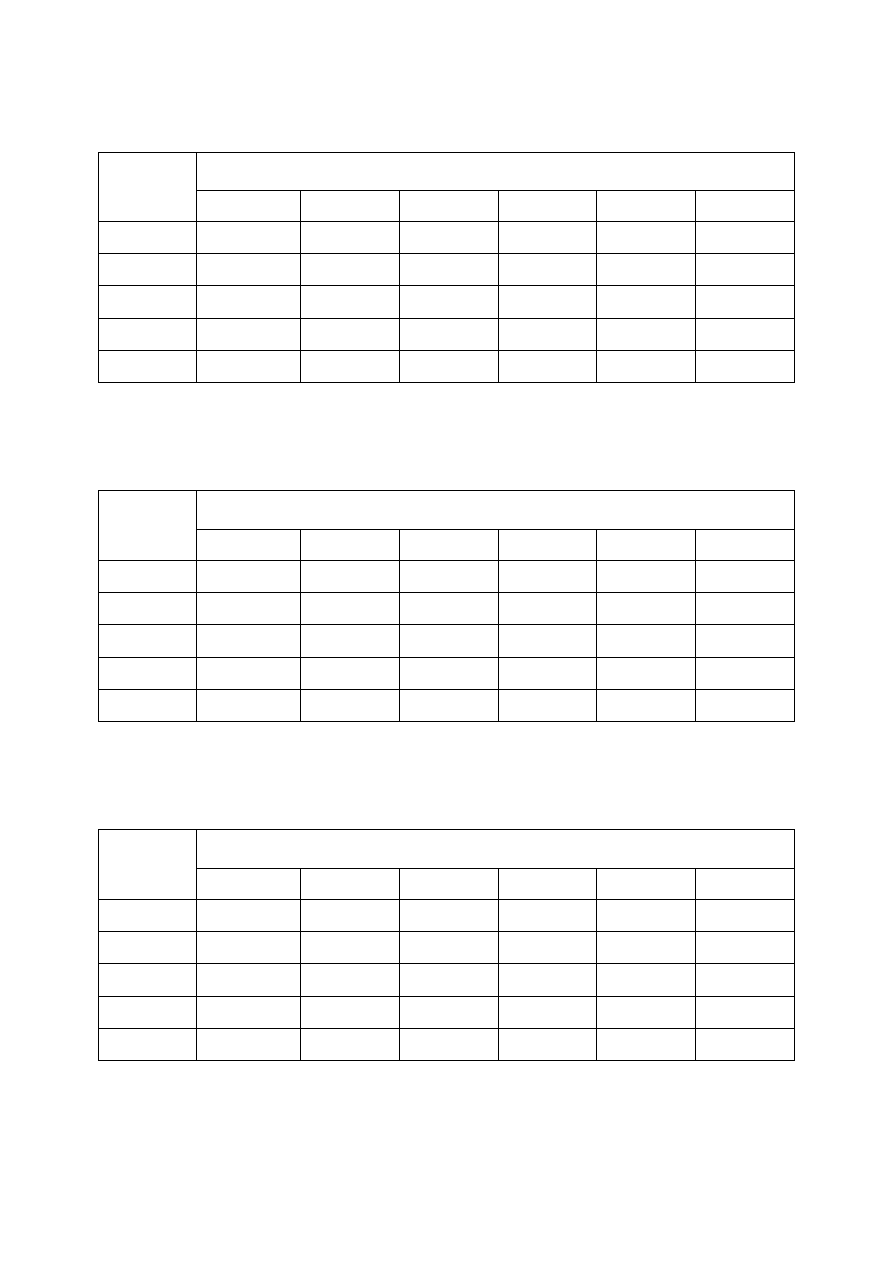
Tabela 24. Zasięg głębokościowy (D) dla
8
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
100
100
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
5
×
122,95
147,68
169,64
194,86
234,06
268,86
4
10
10
×
141,23
169,64
194,86
223,84
268,86
308,84
4
10
20
×
*
162,24
194,86
223,84
257,13
308,84
354,76
4
10
40
×
*
186,36
223,84
257,13
295,36
354,76
407,52
4
10
50
×
194,86
234,06
268,86
308,84
370,95
426,11
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
16
Tabela 25. Czas ostatniego rejestrowanego sygnału dla
10
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
300
300
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
9
5
⋅
×
229,70
132,56
87,45
57,70
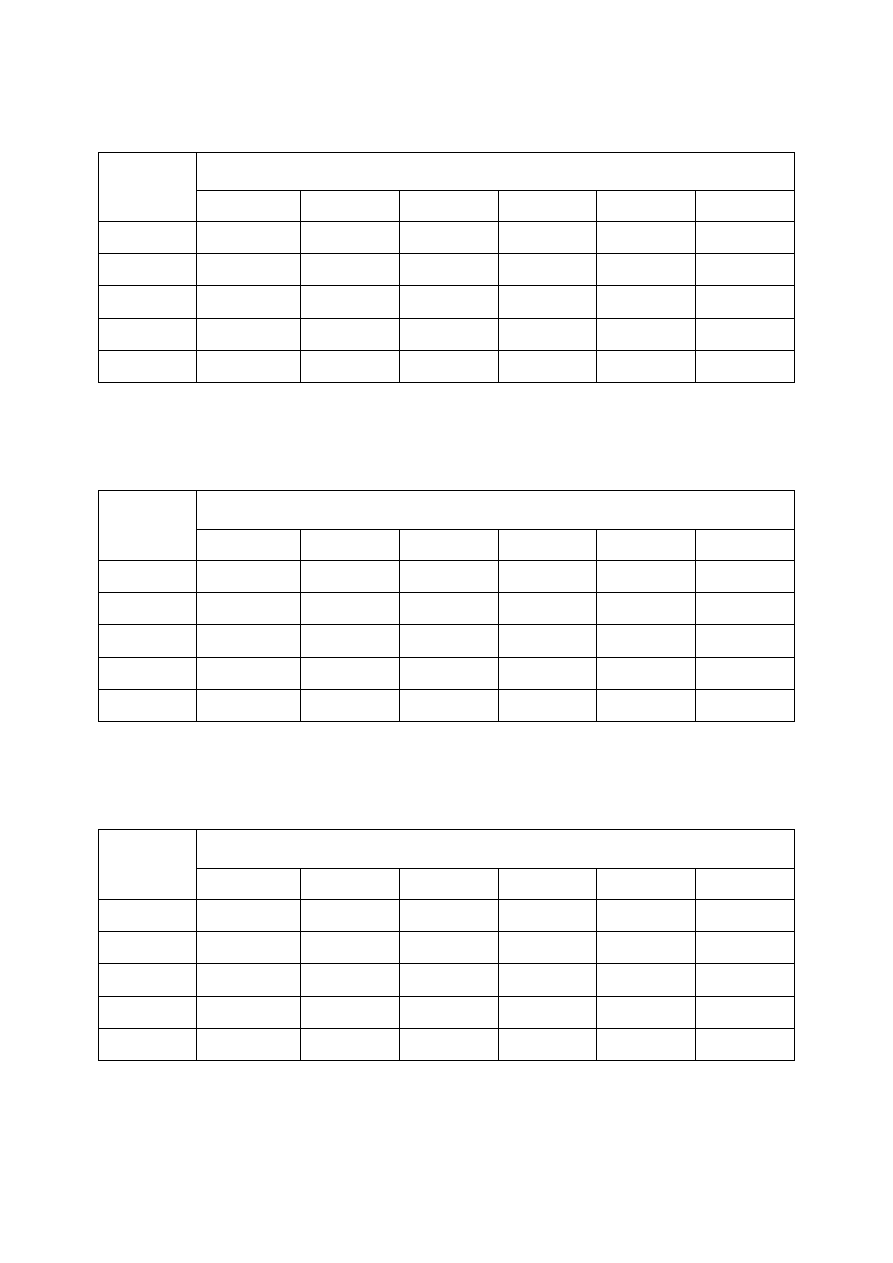
33,30
21,97
4
10
9
10
⋅
×
303,09
174,91
115,40
76,13
43,93
28,99
4
10
9
20
⋅
×
*
399,93
230,79
152,27
100,46
57,97
38,25
4
10
9
40
⋅
×
*
527,71
304,53
200,92
132,56
76,50
50,47
4
10
9
50
⋅
×
576,98
332,96
219,67
144,93
83,64
55,18
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
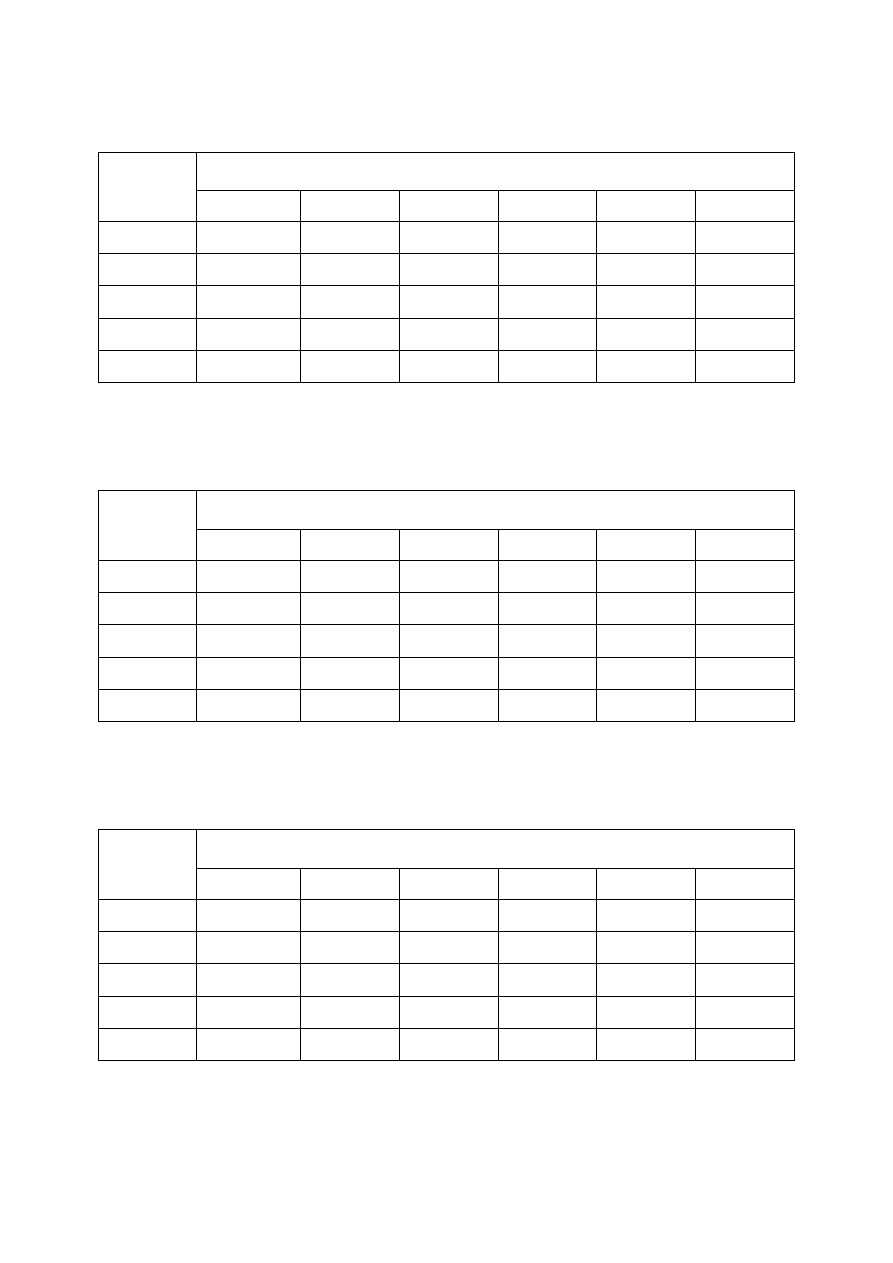
Tabela 26. Zasięg głębokościowy (D) dla
10
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
300
300
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
9
5
⋅
×
479,27
575,66
661,26
759,59
912,37
1048,03
4
10
9
10
⋅
×
550,54
661,26
759,59
872,54
1048,03
1203,87
4
10
9
20
⋅
×
*
632,40
759,59
872,54
1002,29
1203,87
1382,89
4
10
9
40
⋅
×
*
726,44
872,54
1002,29
1151,33
1382,89
1588,52
4
10
9
50
⋅
×
759,59
912,37
1048,03
1203,87
1446,00
1661,02
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 27. Czas ostatniego rejestrowanego sygnału dla
9
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
300
300
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
9
5
⋅
×
91,45
52,77
34,82
22,97
13,26
8,75
4
10
9
10
⋅
×
120,66
69,63
45,94
30,31
17,49
11,54
4
10
9
20
⋅
×
*
159,22
91,88
60,62
39,99
23,08
15,23
4
10
9
40
⋅
×
*
210,09
121,24
79,99
52,77
30,45
20,09
4
10
9
50
⋅
×
229,70
132,56
87,45
57,70
33,30
21,97
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
17
Tabela 28. Zasięg głębokościowy (D) dla
9
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
300
300
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
9
5
⋅
×
302,40
363,22
417,23
479,27
575,66
661,26
4
10
9
10
⋅
×
347,37
417,23
479,27
550,54
661,26
759,59
4
10
9
20
⋅
×
*
399,02
479,27
550,54
632,40
759,59
872,54
4
10
9
40
⋅
×
*
458,35
550,54
632,40
726,44
872,54
1002,29
4
10
9
50
⋅
×
479,27
575,66
661,26
759,59
912,37
1048,03
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
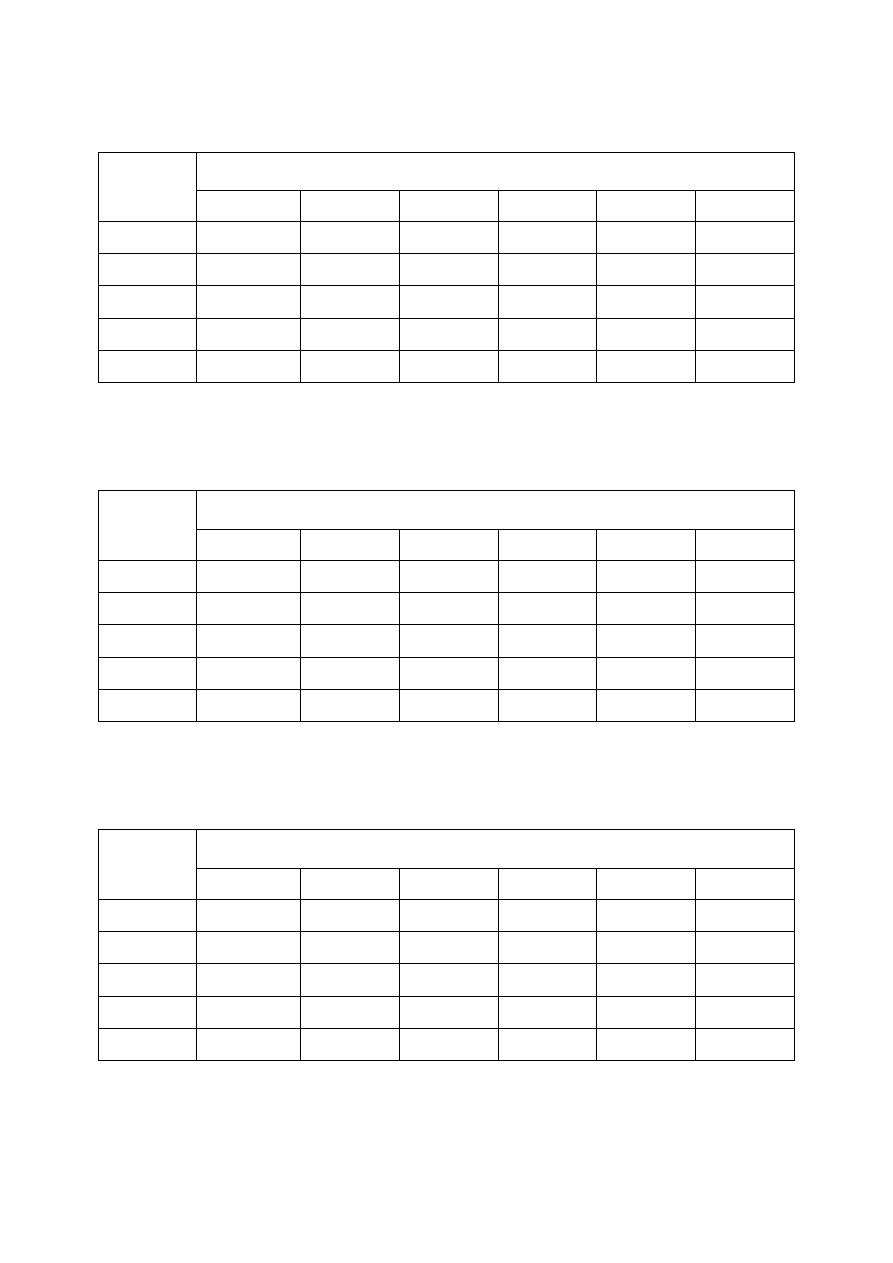
Tabela 29. Czas ostatniego rejestrowanego sygnału dla
8
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
300
300
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
9
5
⋅
×
36,41
21,01
13,86
9,14
5,28
3,48
4
10
9
10
⋅
×
48,04
27,72
18,29
12,07
6,96
4,59
4
10
9
20
⋅
×
*
63,38
36,58
24,13
15,92
9,19
6,06
4
10
9
40
⋅
×
*
83,64
48,27
31,84
21,01
12,12
8,00
4
10
9
50
⋅
×
91,45
52,77
34,82
22,97
13,26
8,75
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 30. Zasięg głębokościowy (D) dla
8
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
300
300
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
9
5
⋅
×
190,80
229,18
263,25
302,40
363,22
417,23
4
10
9
10
⋅
×
219,17
263,25
302,40
347,37
417,23
479,27
4
10
9
20
⋅
×
*
251,76
302,40
347,37
399,02
479,27
550,54
4
10
9
40
⋅
×
*
289,20
347,37
399,02
458,35
550,54
632,40
4
10
9
50
⋅
×
302,40
363,22
417,23
479,27
575,66
661,26
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
18
Jak widać z wyżej przedstawionych wyników obliczeń na zasięg głębokościowy w
metodzie procesów przejściowych wpływa wiele czynników takich jak poziom zakłóceń,
oporność badanego ośrodka, moc źródła, rozmiar pętli nadawczej oraz czas pomiaru.
Analizując w/w wyniki obliczeń widać, że poziom zakłóceń w obszarze badań ma ogromne
znaczenie. Dla niewielkiej pętli nadawczej (
2
10
10
m
×
) i dla średniej oporności ośrodka
wynoszącej 10
Ω
m przy niskim poziomie zakłóceń (
2
10
/
10
m
V
−
) dla prądu wynoszącego 40
Amperów zasięg głębokościowy może wynieść ok. 260 metrów. Przy wysokim poziomie
zakłóceń
2
8
/
10
m
V
−
zasięg głębokościowy spada do ok. 100 metrów (tabele 1-2).
Im większy rozmiar pętli nadawczej tym zasięg głębokościowy metody TDEM jest większy.
Dla pętli (
2
20
20
m
×
), średniej oporności ośrodka 10
Ω
m i średniego poziomu zakłóceń
(
2
9
/
10
m
V
−
) oraz dla prądu 40 Amperów zasięg ten wynosi ponad 200 metrów (tabele 9 i
10). W takich samych warunkach dla pętli nadawczej o rozmiarach (
2
40
40
m
×
) zasięg
głębokościowy rośnie do ponad 290 metrów (tabele 15 i 16), a dla dużych pętli tj.
2
100
100
m
×
i
2
300
300
m
×
zasięgi głębokościowe rosną do odpowiednio 426 metrów (tabele
21 i 22) i do 660 metrów (tabele 27 i 28).
Najdłuższe czasy ostatniego rejestrowanego sygnału dla średniego poziomu zakłóceń
(
2
9
/
10
m
V
−
) dla prądu wynoszącego 50 Amperów uzyskuje się dla układu
2
300
300
m
×
i dla
niskiej oporności (2
Ω
m). Wartość tego czasu osiąga 230 ms. Mimo krótszego czasu
ostatniego rejestrowanego sygnału (ok. 22 ms) przy dużej oporności ośrodka (100
Ω
m)
uzyskuje się większy zasięg głębokościowy (1050 metrów wobec 480 metrów, patrz tabele
27-28). Dla niewielkich pętli nadawczych (
2
10
10
m
×
i
2
20
20
m
×
) maksymalne rejestrowane
czasy mogą wynieść od kilku do kilkudziesięciu ms, a zasięgi głębokościowe od ok.
kilkudziesięciu metrów do ponad 500 metrów w zależności od oporności ośrodka, mocy
ź
ródła i poziomu zakłóceń (tabele 1-12).
Są to typowe przedziały penetracji dla metody TDEM. Oczywiście dla większych pętli
nadawczych można uzyskać większe zasięgi głębokościowe np. dla pętli nadawczej o
rozmiarach
2
500
500
m
×
(to największe jakie się stosuje) dla średniego poziomu zakłóceń
(
2
9
/
10
m
V
−
) zasięg głębokościowy może przekroczyć dla dużych oporności nawet 2000
metrów, a dla dużej mocy osiąga wartość ok. 1000 metrów (tabele 31 i 32). Jak wcześniej
wspomniano dla specjalnych źródeł i układów pomiarowych (z dużym offsetem) można
osiągnąć dużo większy zasięg głębokościowy, nawet do 10000 metrów (Keller et al., 1984).
19
Tabela 31. Czas ostatniego rejestrowanego sygnału dla
9
10
−
=
Nm
[V/m
2
] oraz dla
rozmiaru pętli nadawczej
500
500
×
m
(w milisekundach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
25
5
⋅
×
345,65
199,47
131,60
86,82
50,10
33,06
4
10
25
10
⋅
×
456,09
263,20
173,65
114,57
66,11
43,62
4
10
25
20
⋅
×
*
601,82
347,30
229,13
151,17
87,24
57,56
4
10
25
40
⋅
×
*
794,10
458,26
302,34
199,47
115,11
75,94
4
10
25
50
⋅
×
868,24
501,05
330,57
218,09
125,86
83,03
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
Tabela 32. Zasięg głębokościowy (D) dla
9
10
−
=
Nm
[V/m
2
] oraz dla rozmiaru pętli
nadawczej
500
500
×
m
(w metrach)
oporność
a
ρ
[ ]
m
Ω
t
M
[Am
2
]
2
5
10
20
50
100
4
10
25
5
⋅
×
587,92
706,17
811,18
931,80
1119,20
1285,63
4
10
25
10
⋅
×
675,35
811,18
931,80
1070,35
1285,63
1476,80
4
10
25
20
⋅
×
*
775,77
931,80
1070,35
1229,51
1476,80
1696,39
4
10
25
40
⋅
×
*
891,13
1070,35
1229,51
1412,34
1696,39
1948,64
4
10
25
50
⋅
×
931,80
1119,20
1285,63
1476,80
1773,82
2037,58
(*) – 20, 40 [Amperów] – dla aparatury V8 (Phoenix)
20
2. Technika i metodyka pomiarów
Typowy system pomiarowy dla metody TDEM składa się z nadajnika (transmitter-Tx)
i zwykle kwadratowej pętli nadawczej wykonanej z przewodnika umieszczonego na
powierzchni
ziemi,
odbiornika
(receiver-Rx)
i
zwykle
cewki
odbiornika
(rys. 4).
Cewka odbiornika
(Receiver Coil)
Odbiornik
(Receiver)
P
ę
tla nadawcza
(Transmitter loop)
Nadajnik
(Transmitter)
Rys. 4. Typowy układ pomiarowy dla metody TDEM
Rozmiar pętli nadawczej jest uzależniony od potrzebnej głębokości penetracji. Dla
płytkiego zasięgu głębokościowego (mniej niż 40 metrów) rozmiar pętli (boku kwadratu)
wynosi zwykle od 5 do 10 metrów. Dla niewielkich pętli nadawczych (krótkie pętle, small
loop), o rozmiarach np. 10, 20, 40 m, z układem centralnym (central loop, patrz rys. 6)
głębokość badań może osiągnąć od 4 do 5 krotności średnicy pętli nadawczej. Dla głębokości
penetracji do 1000 m i więcej konieczne jest stosowanie pętli nadawczej o rozmiarach do
kilkuset metrów (długie pętle, long loop), np. 300 m, a nawet 500 metrów. W celu
osiągnięcia dużego zasięgu (do 10 km) konieczne jest stosowanie układu z odsunięciem pętli
nadawczej od cewki pomiarowej (offset loop) nawet do kilkudziesięciu km, ze źródłem o
momencie ok. miliona Amper na metr i więcej (Keller G.V. et al., 1984).
Odbiornikiem w metodzie TDEM jest wielozwojowa cewka zlokalizowana na
powierzchni ziemi zwykle w środku pętli nadawczej (central loop). W takim przypadku, gdy
wyznaczamy krzywą oporności pozornej w funkcji czasu (t), czyli krzywą sondowania, to
punkt pomiarowy znajduje się w punkcie centralnym pętli nadawczej.
Napięcie cewki odbiorczej ma przebieg przedstawiony na rys. 5.
21
T/4
T/4
T/4
T/4
N
a
p
i
ę
c
ie
o
d
b
io
rn
ik
a
T/4
T/4
T/4
T/4
P
r
ą
d
p
ę
tl
i
n
a
d
a
w
c
z
e
j
T/4
T/4
czas
czas
Rys. 5. Postać napięcia cewki odbiorczej
Układy pomiarowe stosowane w metodzie TDEM to układy dla których uzyskuje się:
I. Pojedyncze krzywe sondowań TDEM (vertical sounding array) (Kenneth L. Zonge, 1992)
(mierzona jest tutaj składowa
z
H
):
1. cewka pomiarowa znajduje się w środku pętli nadawczej (central-loop/in loop):
Cewka odbiornika
Odbiornik
P
ę
tla nadajnkia
Nadajnik
Tx
Rx
Rys. 6. Układ pomiarowy w metodzie TDEM z cewką odbiornika znajdującą się w środku
pętli nadawczej
2. jako nadajnika i odbiornika używa się tej samej pętli (zwykle długiej: 100 – 300 metrów)
(central loop/single loop):
Odbiornik
P
ę
tla nadajnkia
i odbiornika
Nadajnik
Tx
Rx
Rys. 7. Układ pomiarowy w metodzie TDEM ze wspólną pętlą odbiornika i pętlą nadajnika
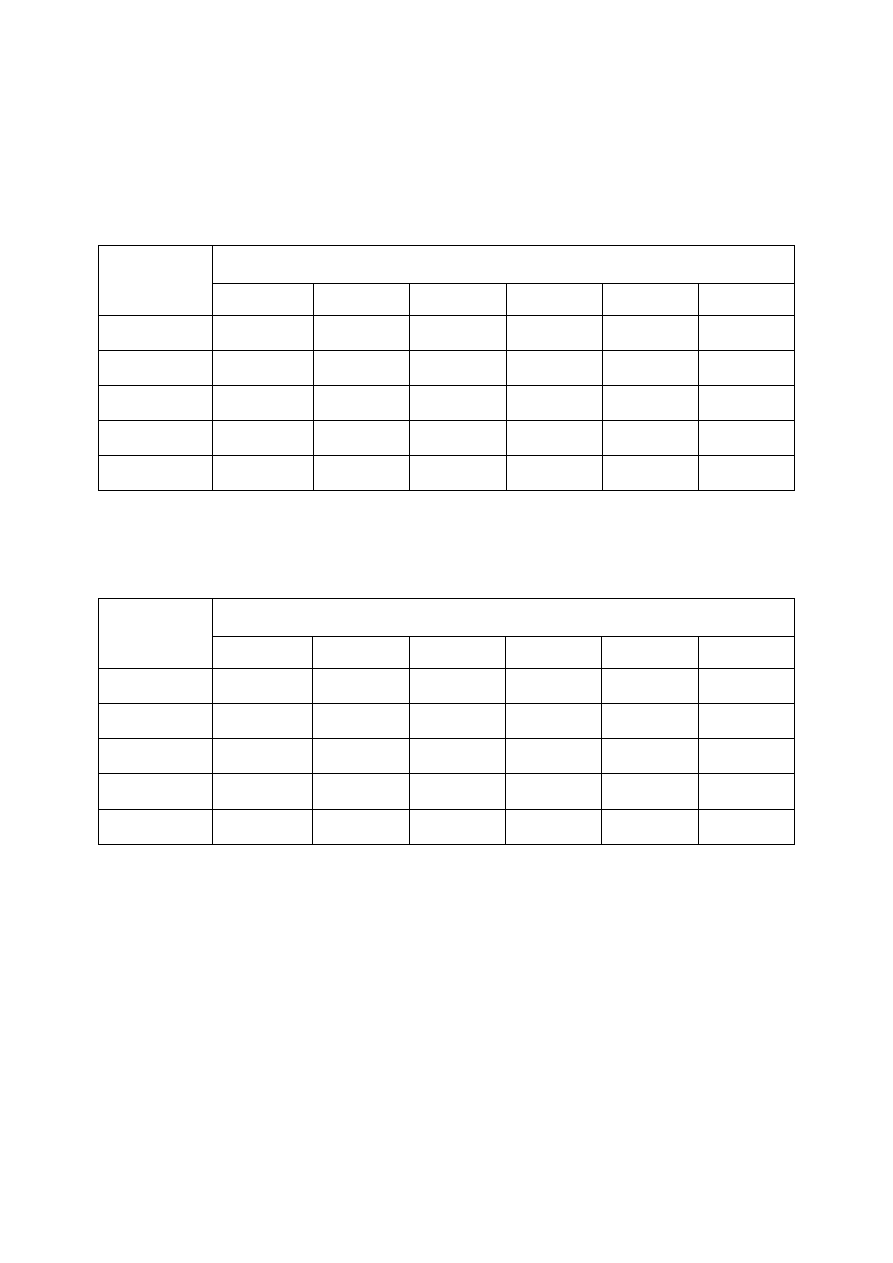
3. odbiornik i nadajnik to różne pętle przesunięte względem siebie na powierzchni ziemi
(loop-offset). Zwykle odległość między odbiornikiem i nadajnikiem jest niewielka i wynosi
kilkadziesiąt metrów do kilometra (small offset):
22
P
ę
tla nadajnkia
Nadajnik
Tx
Cewka odbiornika
Odbiornik
Rx
Odległo
ść
pomi
ę
dzy
p
ę
tl
ą
nadajnika i cewk
ą
odbiornika
Rys. 8. Układ pomiarowy w metodzie TDEM z odbiornikiem i nadajnikiem przesuniętych
względem siebie
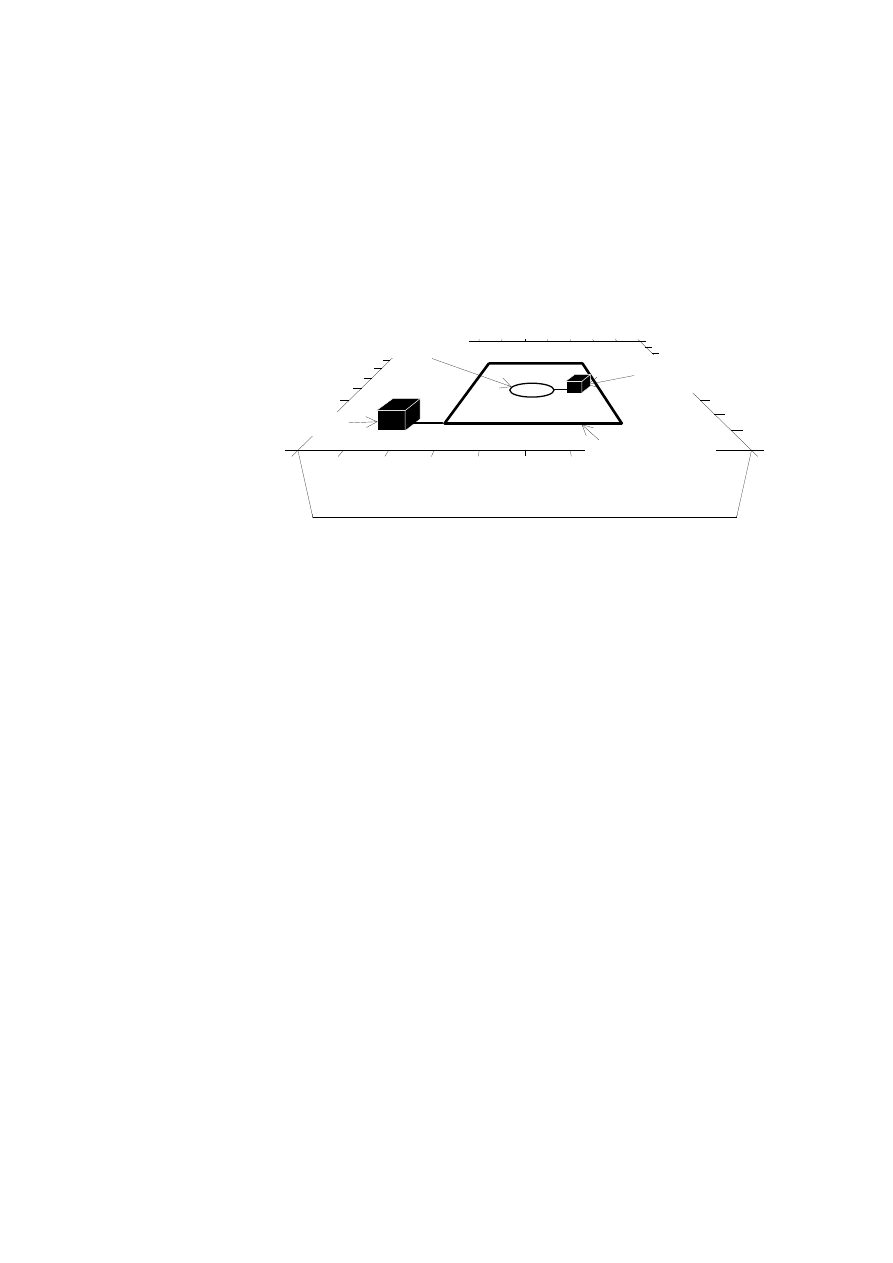
II. Druga wersja układów to układy profilowe (profilling arrays) (Kenneth L. Zonge, 1992):
1. długa pętla nadawcza (nieruchoma) i cewka odbiorcza poruszająca się wzdłuż profilu
prostopadłego do jednego ramienia pętli nadawczej (fixed-loop) (mierzona składowa
z
H
):
Nieruchoma p
ę
tla nadawcza
Nadajnik
Tx
Cewka odbiornika
Odbiornik
Rx
profile poprzeczne
Ruchomy odbiornik
Rys. 9. Układ pomiarowy profilowy w metodzie TDEM z odbiornikiem ruchomym i
nadajnikiem nieruchomym przesuniętych względem siebie
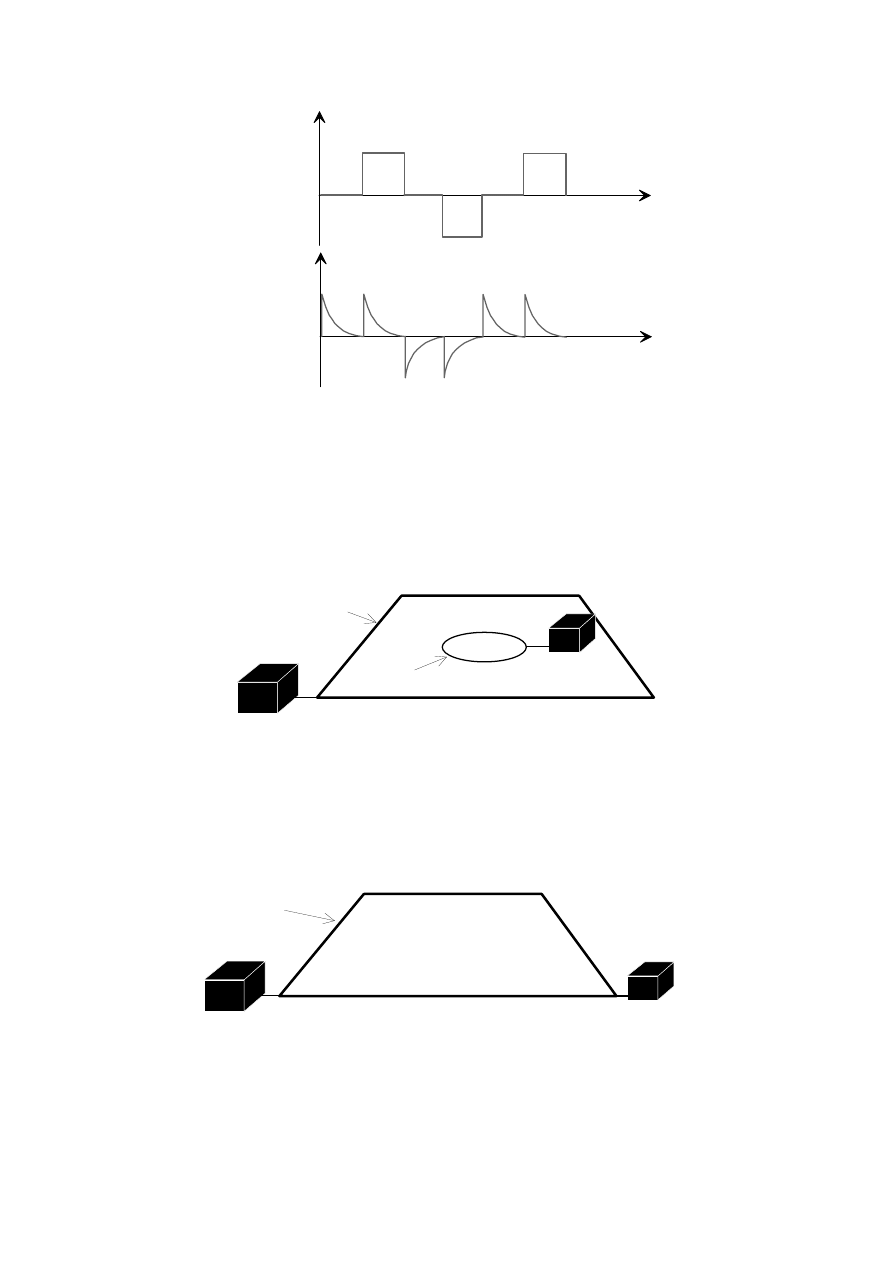
2. cewka nadawcza i odbiorcza o podobnych rozmiarach poruszają się w pewnej odległości
wzdłuż profilu (mierzona składowa
z
H
):
Nadajnik
Tx
Cewka
odbiornika
Odbiornik
Rx
Kierunek profilu
Cewka
nadajnika
Stała odległo
ść
pomi
ę
dzy
nadajnikiem i odbiornikiem
Rys. 10. Układ pomiarowy profilowy w metodzie TDEM z ruchomym odbiornikiem i
nadajnikiem przesuniętych względem siebie ze stałą odległością
3. LOTDEM (long offset TDEM) z dużą odległością pomiędzy pętlą nadawczą a cewką
odbiorczą (rzędu km i kilkudziesięciu km). Pętla nadawcza ma zwykle duże rozmiary (np.
100 metrów i więcej). Mierzy się tutaj składowe
x
H ,
y
H i
z
H
i uzyskuje obraz 3-D na
pewnej głębokości. Duże odległości pomiędzy nadajnikiem i odbiornikiem stosowane są w
bardzo głębokich badaniach (Keller G.V. et al., 1984).

23
Najczęściej stosowane układy pomiarowe w metodzie procesów przejściowych to
układy dla których uzyskuje się pojedyncze krzywe sondowań. Są to układy z cewką
odbiornika znajdującą się w pętli nadawczej lub z odbiornikiem i nadajnikiem nieznacznie
przesuniętych względem siebie.
Pomimo niedużych odległości nadajnik – odbiornik (a nawet „zerowych” w przypadku
układu central loop) metoda TDEM pozwala na osiągnięcie zasięgu głębokościowego do
kilkuset a nawet tysięcy metrów. Jest tutaj wykorzystana właściwość pola magnetycznego
ź
ródła impulsowego, gdzie zmiany czasowe pionowej składowej wektora indukcji
magnetycznej w strefie bliskiej nie zależą od odległości nadajnik – odbiornik (Klityński,
Miecznik, 1998). Taka właściwość pola nie występuje ani w metodzie elektrooporowej, gdzie
rozstaw układu pomiarowego musi być wielokrotnie większy od głębokości penetracji ani w
metodach elektromagnetycznych w domenie częstotliwości, gdzie odległość nadajnik
odbiornik dla takich zasięgów głębokościowych musi być znaczna. Realizacja sondowań
metodą procesów przejściowych w strefie bliskiej oprócz udogodnień metodycznych daje
istotną korzyść natury interpretacyjnej. Na wartość amplitudy pola elektromagnetycznego w
strefie bliskiej w niewielkim stopniu wpływają boczne – w stosunku do punktu centralnego
układu pomiarowego – niejednorodności badanego ośrodka, co istotnie wpływa na wysoką
dokładność interpretacji krzywych sondowań TDEM (jest to najczęściej interpretacja 1D).
Często jednak wpływy boczne (ośrodek 2D/3D), zjawisko IP czy zjawisko
superparamagnetyzmu powodują zakłócenia krzywych dla układu centralnego i
niejednoznaczności interpretacji 1D danych TDEM. Wówczas stosuje się specjalną metodykę
pomiarową w której wykorzystuje się układy central loop i offset loop jednocześnie .
3. Przetwarzanie danych
Dane zapisywane i przechowywane są w postaci ciągu danych cyfrowych jako rezultat
próbkowania odbiornika układu pomiarowego. Typowe dane mogą zawierać 250-1000
próbek sekundę (Keller, G.V.,1997).
Odbiornik zawiera kilkadziesiąt wąskich bramek pomiarowych (najczęściej 20) na których
mierzona jest amplituda malejącego napięcia na kolejno następujących po sobie bramkach
czasowych (rys. 11).
24
czas
1 2 3 4 5 6
19 20
Rys. 11. Napięcie odbiornika w bramkach czasowych
Bramki czasowe w czasie pomiaru różnią się w celu minimalizacji zakłóceń pomiarowych.
Dla ograniczenia zakłóceń w pomiarach początkowa bramka jest wąska czyli w miejscu w
którym napięcie zmienia się gwałtownie. Później, gdy amplituda niewiele się zmienia bramka
się poszerza.
Okres prądu dla pętli nadawczej wynosi zwykle ok. 1 ms albo mniej. W takim
przypadku kilkusekundowy pomiar może wygenerować tysiące sygnałów przejściowych. Im
dłuższy czas pomiaru tym bardziej poprawia stosunek sygnału do zakłóceń. Jeden impuls nie
da wystarczająco dużo informacji, a wiele impulsów pozwala uzyskać krzywą sondowania
TDEM. Processing zwykle zawiera następujące procedury: dekonwolucji sygnału odbiornika,
tłumienia zakłóceń i normalizacji związanej z geometrią układu. Czasami impulsowe
zakłócenia losowe stanowią duży problem. Takie zakłócenia są ograniczane przy
wykorzystaniu tzw. przetwarzania typu robust. Najważniejszym elementem przetwarzania
danych w metodzie TDEM jest eliminacja zakłóceń przemysłowych. Wykonuje się to m.in.
przez „składanie” kolejnych porcji danych. W rezultacie amplitudy sygnałów użytecznych są
podwójnie wzmacniane, a amplitudy zakłóceń są redukowane. Elementem przetwarzania jest
również zastosowanie filtru dolnoprzepustowego celem uniknięcia zjawiska aliasingu.
Ponieważ system przetwarzania nie jest perfekcyjny używana jest dekonwolucja. Tutaj
najważniejszą rolę odgrywa tzw. „bootstrapping”, gdzie sygnał użyteczny jest oddzielany od
sygnału zakłócającego.
Rejestrowany sygnał zależy nie tylko od rozkładu oporności w Ziemi ale także od geometrii
układu pomiarowego, mocy źródła i czułości odbiornika. Ta zależność jest eliminowana przez
normalizację sygnału na punkcie polowym sygnałem referencyjnym, który kompensuje w.w.
zależności.
W metodzie TDEM wielkością liczoną i interpretowaną podobnie jak w innych metodach
geoelektrycznych jest oporność pozorna
[ ]
m
a
Ω
ρ
. Krzywa sondowania to oporność pozorna
25
w funkcji czasu
( )
t
a
ρ
:
(
)
3
/
2
/
4
.
0
4
⋅
⋅
⋅
⋅
⋅
=
dt
dB
t
M
t
z
t
o
o
a
µ
π
µ
ρ
, gdzie t – czas pomiaru, mierzony od
czasu wyłączenia pola podstawowego,
t
M - moment nadajnika (powierzchnia pętli –
L
2
[m
2
] pomnożona przez wartość prądu – I [A]) i
dt
dB
z
/
- zmiana w czasie pionowej
składowej pola magnetycznego (Kauffman and Keller, 1983). Tak więc mierzona jest
składowa pionowa pola magnetycznego (
z
H
).
Oporność pozorną praktycznie liczy się z wzoru:
3
/
5
3
/
2
/
5
2
4
−
⋅
⋅
⋅
⋅
⋅
=
t
S
U
M
r
t
o
o
a
µ
π
µ
ρ
, gdzie
[ ]
V
U
to napięcie rejestratora,
r
S
- efektywna powierzchnia cewki rejestratora
[ ]
2
m
.
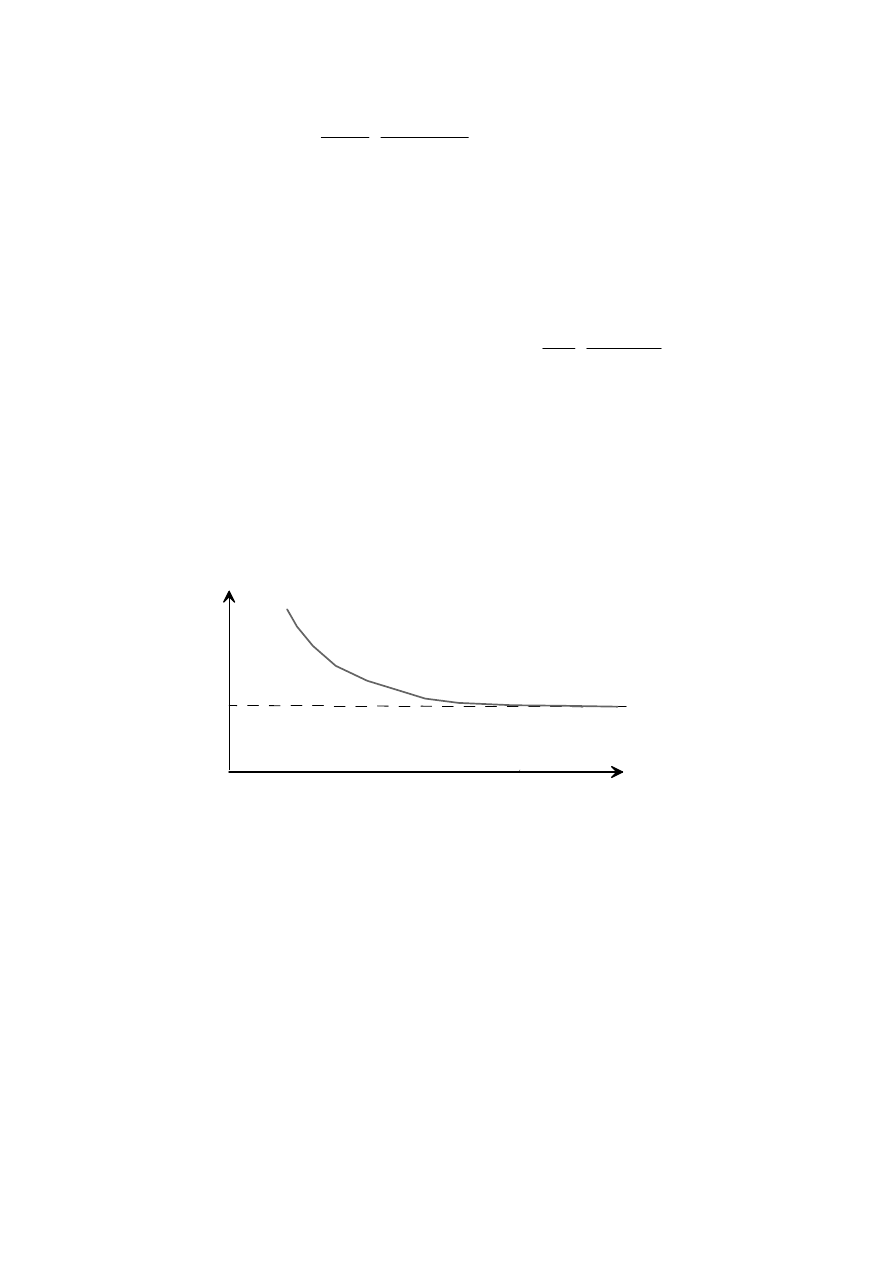
Dla modelu warstwowanego (1D) i dwuwarstwowego, gdy oporności warstw wynoszą
1
ρ
i
2
ρ
, a miąższość pierwszej warstwy wynosi h dla wczesnego czasu (krótkie czasy) krzywa
sondowania wyglądają jak niżej (rys. 12).
log10 (t-czas)
ρ
ρ ρ
log10 ( (t))
ρ
a
1
1
2
>
gał
ąź
opadaj
ą
ca
Rys. 12. Krzywa sondowania w metodzie TDEM dla modelu 1D dwuwarstwowego, gdzie
1
ρ
i
2
ρ
to odpowiednio oporności pierwszej i drugiej warstwy dla wczesnego czasu
Jak widać występuje tzw. gałąź opadająca nie związana z żadną warstwą. Krzywa ta jest
identyczna jak dla modelu jednorodnej półprzestrzeni o oporności
ρ
(patrz rysunek 13).
26
log10 (t-czas)
ρ
log10 ( (t))
ρ
a
gał
ąź
opadaj
ą
ca
Rys. 13. Krzywa sondowania w metodzie TDEM dla modelu jednorodnej półprzestrzeni o
oporności
ρ
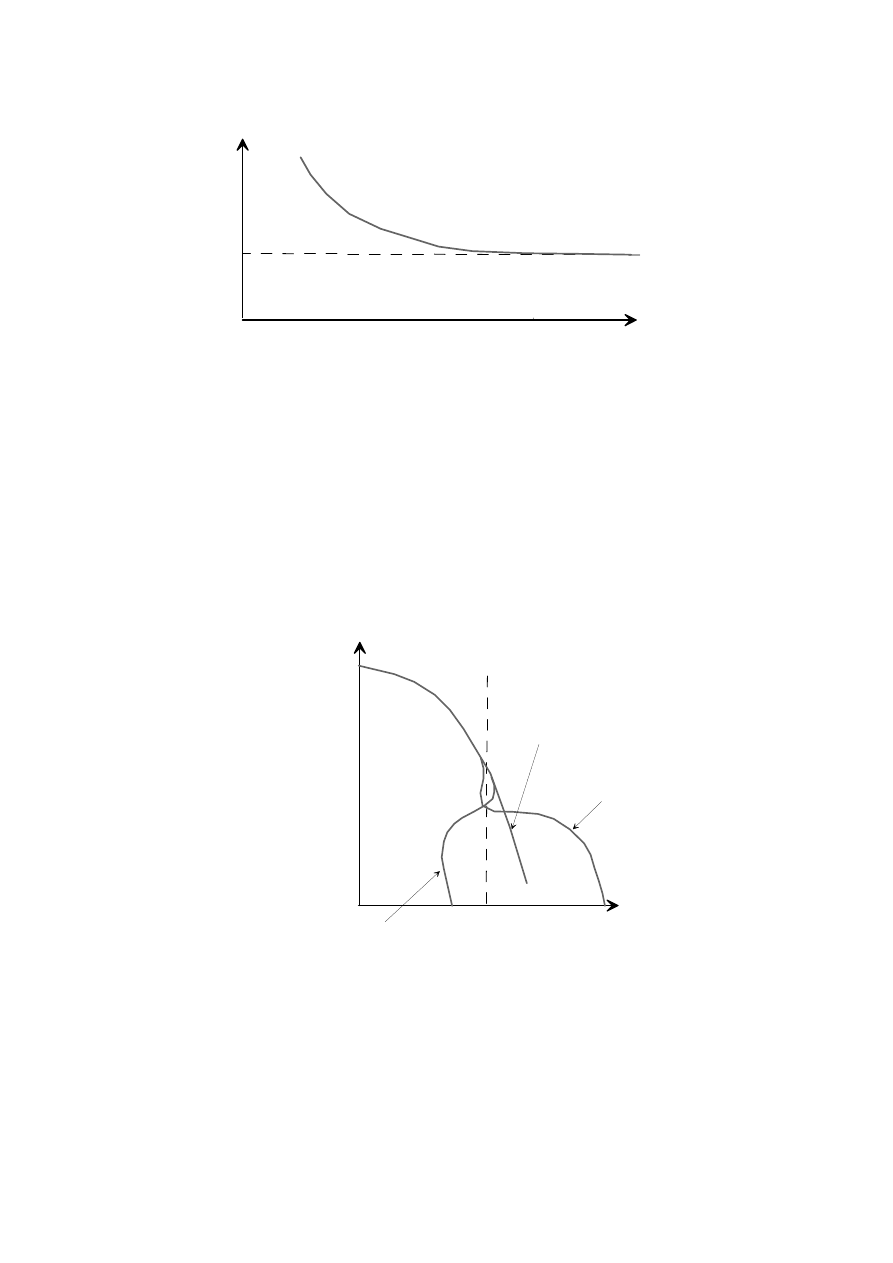
Dla odpowiednio długiego czasu rejestracji (
*
t
t
>
), dla modelu dwuwarstwowego, gdy
1
2
ρ
ρ
>
mierzone napięcie odbiornika będzie mniejsze niż powinno być dla modelu
półprzestrzeni o oporności
1
ρ
(patrz rysunek 14a). W przypadku gdy
1
2
ρ
ρ
<
w
późniejszym czasie (
*
t
t
>
) mierzone napięcie odbiornika będzie większe niż powinno być
dla modelu półprzestrzeni o oporności
1
ρ
(patrz rysunek 14b).
log10 (t-czas)
lo
g
1
0
(
n
a
p
i
ę
c
ie
o
d
b
io
rn
ik
a
)
(t=t*)
log10 ( (t))
model
półprzestrzeni
o oporno
ś
ci:
model
dwuwarstwowy:
model
dwuwarstwowy:
ρ
ρ ρ
1
2
1
>
ρ ρ
2
1
<
ρ
a
a)
b)
Rys. 14. Napięcie odbiornika dla modelów: półprzestrzeni i dwuwarstwowego 1D dla
metody TDEM
Gdy czas rejestracji przekroczy wartość t
*
to krzywe sondowań TDEM dla modelu
dwuwarstwowego wyglądają jak niżej (rys. 15).
27
log10 (t-czas)
ρ ρ
log10 ( (t))
ρ
a
1
2
>
ρ
1
ρ
2
log10 (t-czas)
ρ ρ
log10 ( (t))
ρ
a
1
2
<
ρ
2
ρ
1
Rys. 15. Krzywe sondowań w metodzie TDEM dla modelu dwuwarstwowego (1D), gdzie
1
ρ
i
2
ρ
to odpowiednio oporności pierwszej i drugiej warstwy
Podsumowując, dla zbyt krótkich czasów rejestracji otrzymujemy krzywą jak dla modelu
półprzestrzeni o oporności
1
ρ
. Aby otrzymać pełną krzywą czas rejestracji musi przekroczyć
wartość graniczną (t>t
*
).
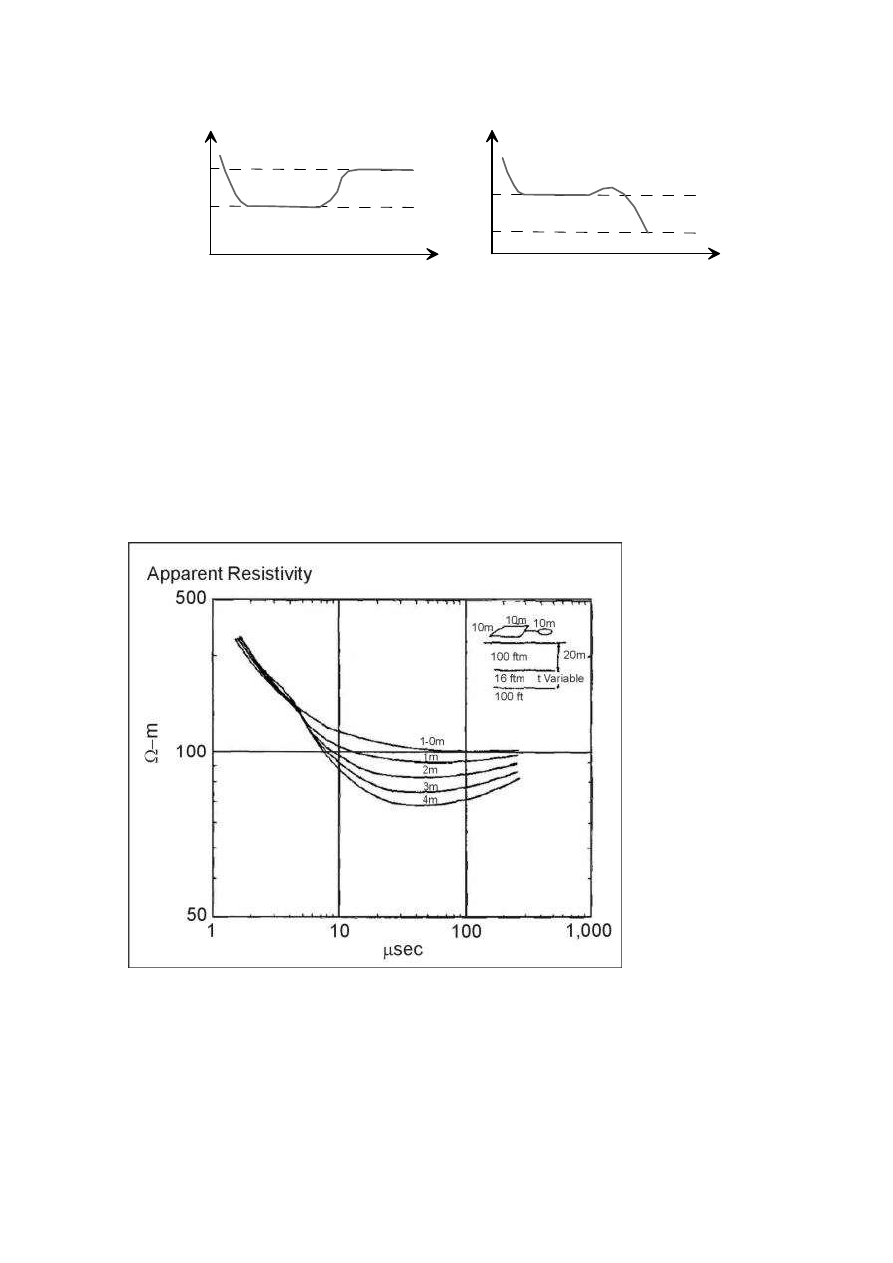
Krzywe sondowań TDEM w zależności od zastosowanego układu pomiarowego (np. central
loop, offset loop) różnią się między sobą np. dla modelu trójwarstwowego wyglądają:
Rys. 16. Krzywe sondowań w metodzie TDEM dla modelu 1D trójwarstwowego (układ
pomiarowy offset loop)
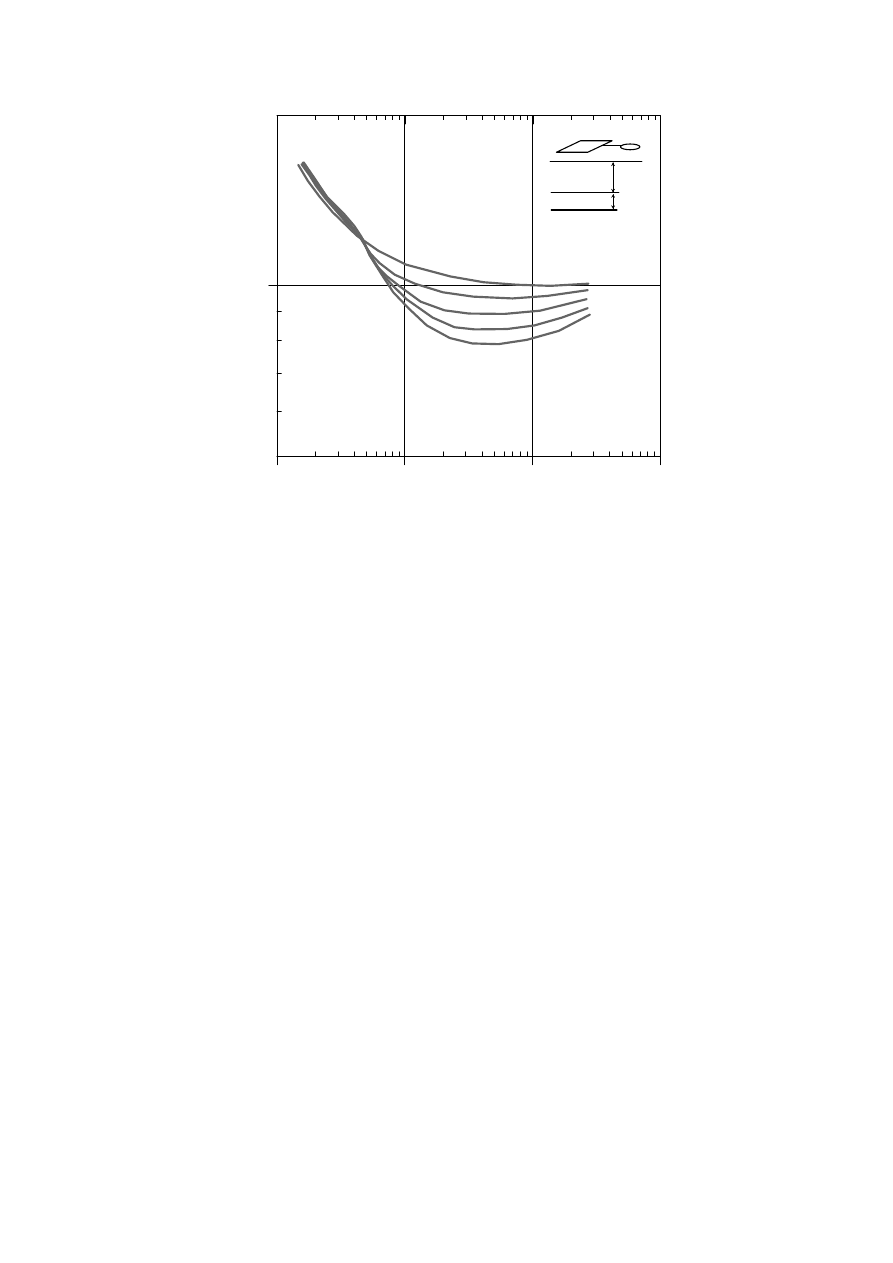
28
1
10
100
1000
µ
sec
100
500
50
Ω
-m
1-0m
1m
2m
3m
4m
10m
10m
10m
100 ftm
16 ftm
100 ftm
20m
t Variable
Rys. 17. Krzywe sondowań w metodzie TDEM dla modelu 1D trójwarstwowego: a -układ
pomiarowy central loop, b – układ pomiarowy offset loop
4. Interpretacja w metodzie TDEM
Zasięg głębokościowy metody TDEM zależy od czasu rejestracji ( t ). Maksymalna
głębokość badań jest jednak określona przez maksymalny czas dla którego jest możliwe
zarejestrowanie napięcia
)
(t
U
. W metodzie TDEM praktycznie niemożliwe jest wydzielenie
warstw o bardzo wysokiej oporności, metoda jest natomiast bardzo efektywna dla warstw o
dobrej przewodności (Giovanni Barrocu & Gaetano Ranieri, 2000). Rozdzielczość metody
TDEM w dużej mierze zależy od rozmiaru pętli nadawczej. Dla bardzo małej pętli (10-15 m)
możliwe jest wydzielenie płytkich warstw o niskich opornościach. Gdy konieczne jest
zapewnienie dużego zasięgu głębokościowego konieczne jest użycie pętli nadawczej dużych
rozmiarów. Wówczas jednak utrudnione jest wydzielenie struktur w płytkich warstwach.
Najbardziej efektywny przedział oporności dla metody TDEM to oporność od niskich
wartości (poniżej 1
Ω
m ) do kilkuset
Ω
m. Miąższość wydzielanych warstw możliwa do
interpretacji dla pętli nadawczej o rozmiarze L wynosi:
10
/
min
L
h
>
a
L
h
3
max
<
(Giovanni
Barrocu & Gaetano Ranieri, 2000).
29
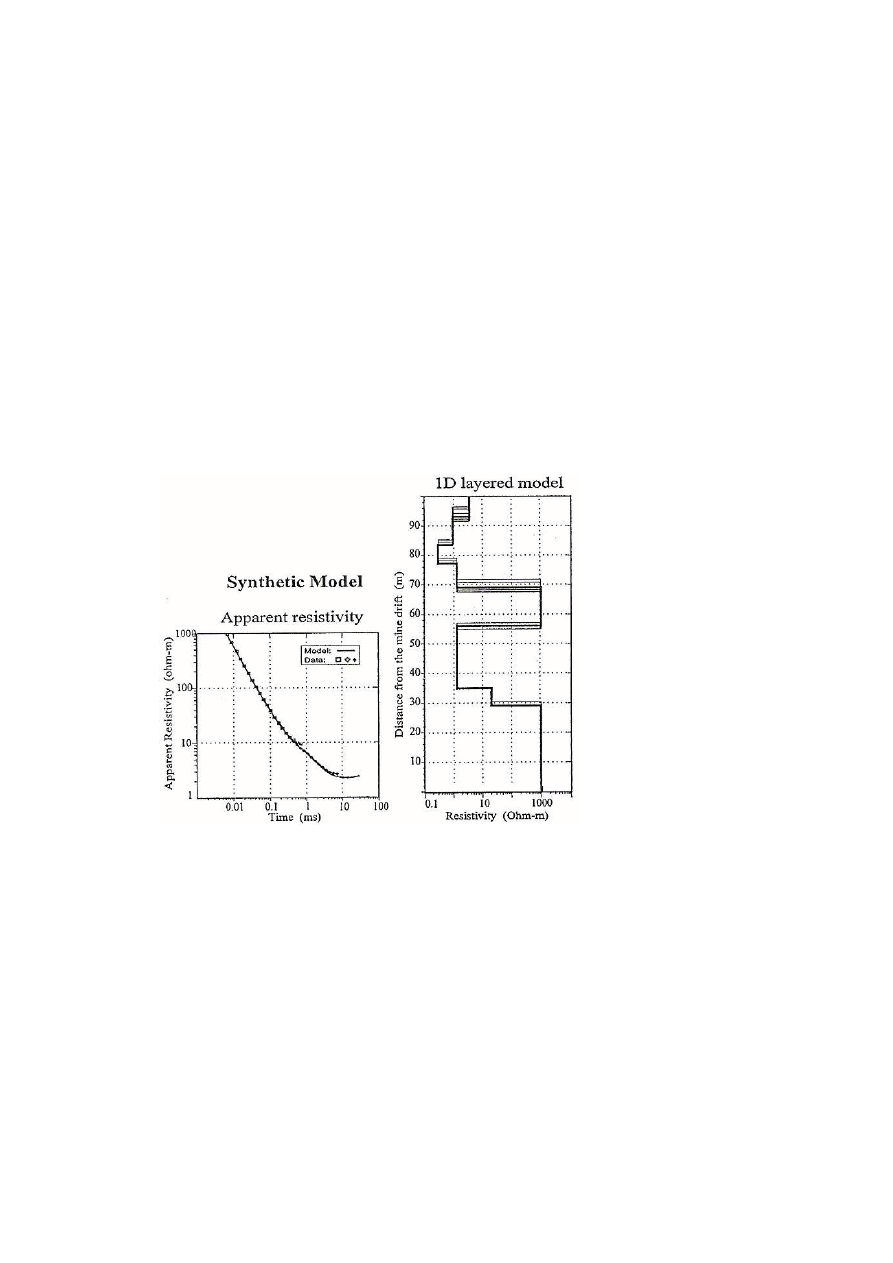
Główną procedurą interpretacyjną stosowaną w metodzie TDEM jest wykorzystanie
algorytmu inwersji przy założeniu modelu jednowymiarowego (1D). Hipotetyczny model 1D
jest konstruowany w procesie interpretacji i dalej liczone są krzywe sondowań TDEM (
( )
t
a
ρ
)
odpowiadające temu modelowi. Model jest zmieniany dopóki nie uzyska się zgodności
danych obserwowanych i teoretycznych (odpowiadających modelowi) z pewną dokładnością.
Zgodność krzywej teoretycznej i polowej uzyskuje się stosując procedury inwersji 1D.
Poniższy rysunek przedstawia przykład inwersji 1D krzywej sondowania TDEM (Rowland
B., 2002).
Rys. 18. Wynik interpretacji 1D danych TDEM (sondowanie TDEM i model geoelektryczny
wynikowy)
Krzywa oporności pozornej prezentuje model 1D czterowarstwowy. Jak widać gałąź
krzywej
odpowiadająca
krótkiemu
czasowi
rejestracji
jest
gałęzią
opadającą
charakterystyczną dla metody TDEM i nie odpowiadającą żadnej warstwie w modelu 1D.
Oporność pozorna podobnie jak w innych metodach geoelektrycznych nie jest
opornością rzeczywistą. Jest równa oporności właściwej tylko dla modelu jednorodnej
półprzestrzeni. Dla modelu warstwowanego jest złożoną funkcją, która podobnie jak w innych
metodach geoelektrycznych podlega zjawisku ekwiwalencji czyli przypadku w którym dwa

30
lub więcej modeli może generować podobne albo identyczne (w granicach błędu
pomiarowego) krzywe sondowań. W modelu interpretacyjnym 1D (co najmniej 3
warstwowym) dla cienkiej warstwy (środkowej) możemy zwiększać miąższość warstwy i
zmniejszać przewodność i uzyskać równie dobre dopasowanie krzywej teoretycznej i krzywej
polowej. To często wywołuje błędy interpretacyjne. Gdy warstwa geoelektryczna badanego
ośrodka jest bardziej miąższa albo kontrast opornościowy duży to ekwiwalencja stanowi
mniejszy problem. Posiadanie dodatkowych informacji o miąższości lub oporności warstwy
ekwiwalentnej całkowicie eliminuje to zjawisko.
Ponieważ głównym modelem interpretacyjnym wykorzystywanym w metodzie
procesów przejściowych jest model 1D jednym z problemów interpretacji danych TDEM są
struktury geologiczne dwu- i trójwymiarowe (2D/3D). Wpływ trójwymiarowości przy
pomiarze układem central loop jest „uśredniany” istnieje jednak problem niejednoznaczności
interpretacji 1D (najczęściej stosowanej) przy wykorzystaniu układów z offsetem (czyli gdy
konieczne jest uzyskanie odpowiedniej rozdzielczości dla dużych głębokości). Aby uniknąć
wpływu modelu 2D/3D na niejednoznaczność interpretacji krzywych sondowań TDEM
należy odpowiednio lokalizować sondowanie (unikając wpływów bocznych) albo stosować
odpowiednią metodykę pomiarową i interpretacyjną – obok układu offset loop należy
stosować układ central loop (Krivochieva and Chouteou, 2001).
Zjawiskiem, które również wpływa na obniżenie efektywności pomiaru i interpretacji
danych TDEM jest zjawisko polaryzacji wzbudzonej (IP effect – Induction Polarization),
które szczególnie manifestuje się dla układu pomiarowego centralnego. Efekt IP zachodzi
przy występowaniu wysokooporowych przypowierzchniowych warstw przykrywających
warstwy o niższej oporności (Giovanni Barrocu & Gaetano Ranieni, 2000). Zjawisko to
wprowadza zaburzenie na krzywej
( )
t
a
ρ
i stwarza duże problemy w interpretacji danych
TDEM (Descloitres et al., 2000). Zjawisko IP zaburza krzywe sondowań niejednokrotnie
uniemożliwiając efektywną interpretację 1D. Poprawę jednoznaczności interpretacji w takich
przypadkach można uzyskać stosując bardziej skomplikowaną konfigurację pomiaru, czyli
metodykę pomiarową opartą o różne układy pomiarowe – obok układu central loop należy
stosować układ offset loop (Descloitres et al., 2000, Krivochieva and Chouteou, 2001).
Wykonując pomiar i interpretację 1D dla obu układów pomiarowych można uzyskać lepszą
rozdzielczość parametrów uzyskanego modelu geoelektrycznego, ograniczenie wpływu
zakłóceń elektromagnetycznych oraz lepsze rozpoznanie strefy przypowierzchniowej co ma
istotne znaczenie w interpretacji danych TDEM. Obie konfiguracje dostarczają niezależną
31
informację o geologicznych strukturach. Dane uzyskane układem pomiarowym central loop
dostarczają bardziej rzetelną informację o płytkich warstwach, offset loop głębszych
warstwach. Na przykładzie badań w Meksyku prowadzonych w celu określenia warunków
hydrogeologicznych (Chalco-Sub-Basin), gdzie występuje ośrodek trójwymiarowy
(wywołany przez boczne struktury ”zaburzające” ośrodek 1D) prześledzono efektywność
wykorzystania obu układów pomiarowych (Krivochieva and Chouteou, 2001).
Doświadczenia wykazały, że interpretacja 1D jest bardziej właściwa (w ośrodku 2D/3D), gdy
poziom zakłóceń EM jest niewielki i zmiany oporności w kierunku poziomym niezbyt duże.
W wielu przypadkach układ central loop jest bardziej narażony na zakłócenia EM (zakłócenia
nadajnika, efekt IP, efekt namagnesowania).
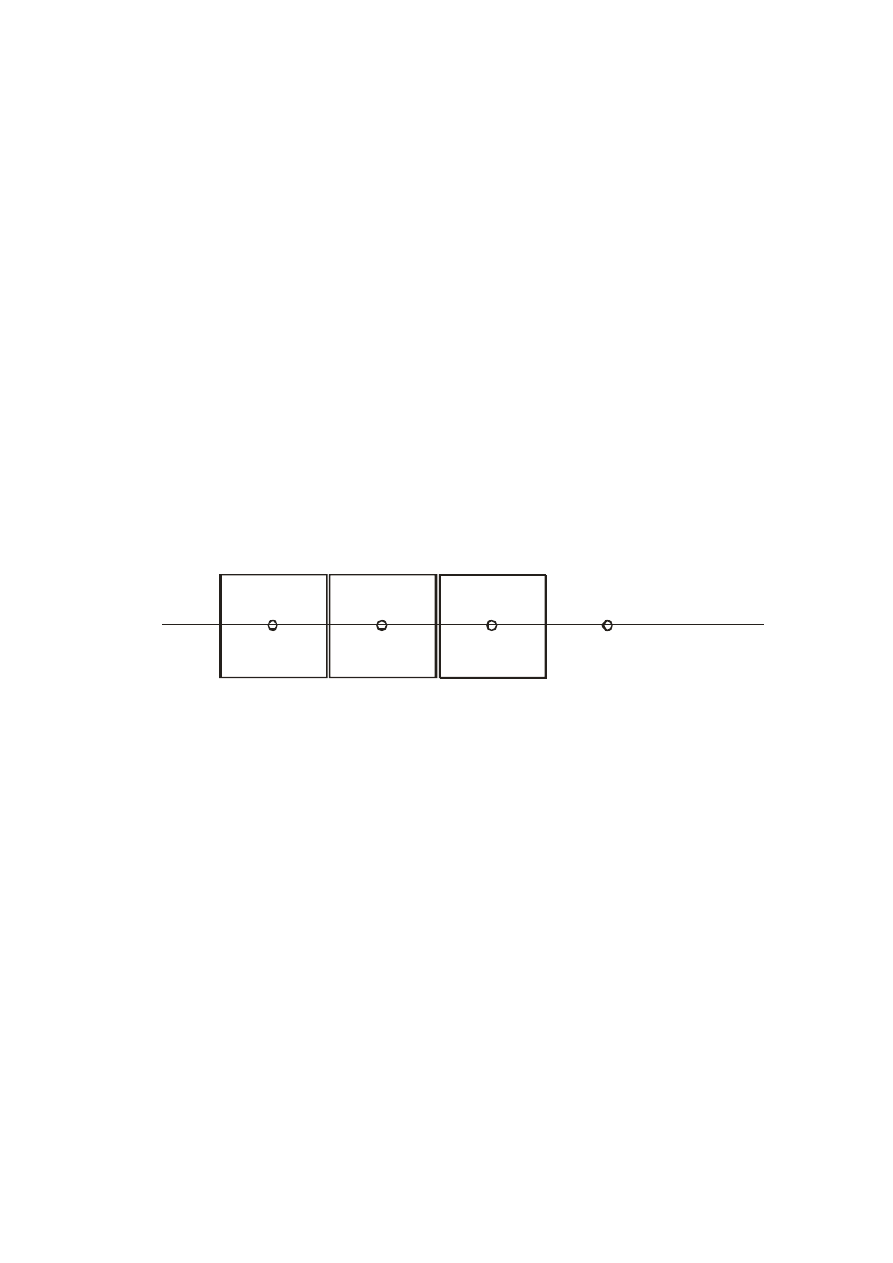
W badaniach w Meksyku wykorzystano następującą konfigurację układu pomiarowego:
1.
)
(
)
(
2
2
1
1
c
Rx
c
Rx
−
- oba układy central loop, 2.
)
(
)
(
1
1
2
2
off
Rx
c
Rx
−
- jeden układ central
loop, drugi offset loop, 3.
)
(
)
(
1
1
1
1
off
Rx
c
Rx
−
- central loop i offset loop itd. (Rys. 19).
Tx
1
Tx
2
Tx
3
Rx (c )
1
1
Rx (c )
2
Rx (c )
3
Rx (off )
1
Rx (off )
2
Rx (off )
3
linia profilu
Rys. 19. Konfiguracja składająca się z kombinacji układów central loop i offset loop
Wyniki interpretacji 1D danych syntetycznych dla poniżej opisanych modeli i dla
dwóch układów pomiarowych (Rys. 19) pokazały, że zastosowana metodyka pomiarowa
pozwoliła na znaczną poprawę rozdzielczości i zmniejszenie ekwiwalencji w interpretacji
danych TDEM. Wykonano modelowania dla typowych modelów symulujących ośrodek
hydrogeologiczny (Krivochieva and Chouteou, 2001).
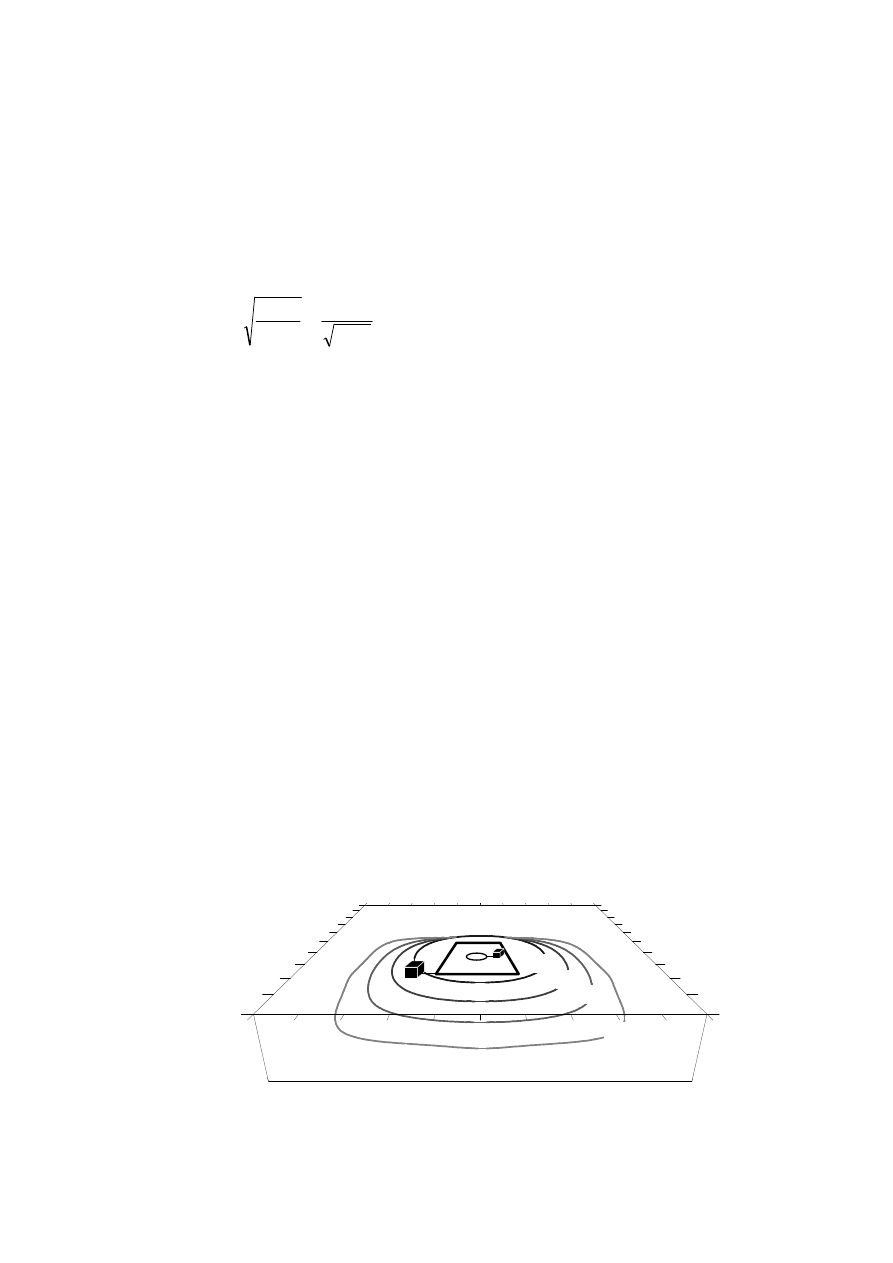
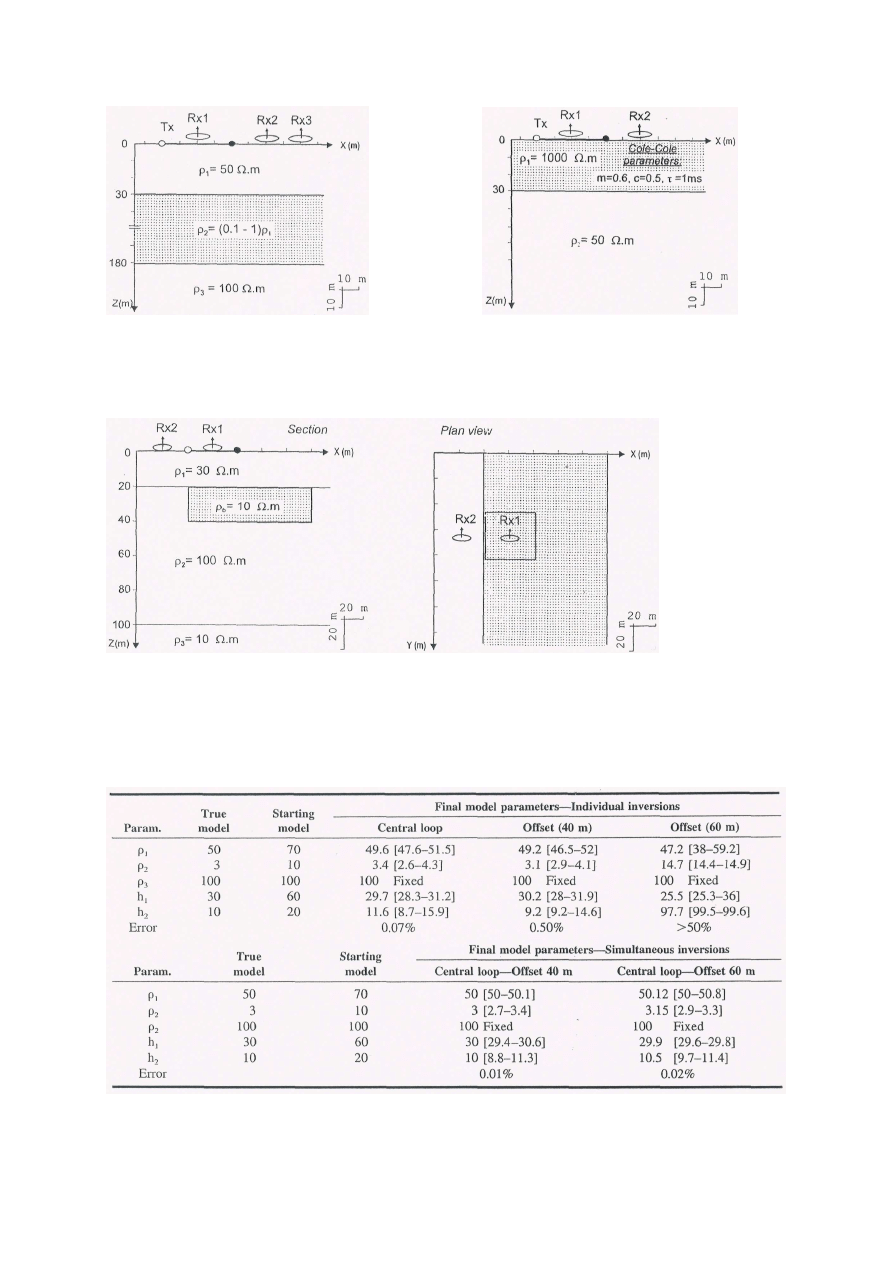
Model A to model ośrodka 3-warstwowego ze zmienną opornością drugiej warstwy (warstwa
niskooporowa,
rys.
20).
Model
B
to
dwuwarstwowy
ośrodek
zawierający
przypowierzchniową warstwę wysokooporową będącą źródłem efektu polaryzacji
wzbudzonej (IP) zalegającą na warstwie niepolaryzującej (rys. 21). Model C zawiera
strukturę 3D umieszczoną w warstwowanym ośrodku (rys. 22).
32
Rys. 20 Model A
Rys. 21 Model B
Rys. 22 Model C
Dla danych syntetycznych odpowiadających modelowi A wykonana została interpretacja 1D
przy wykorzystaniu układu central loop i offset loop (tabela 33).
Tabela 33. Rezultaty jednoczesnej inwersji 1D dla układu central loop i offset loop dla
modelu A (rys. 20)
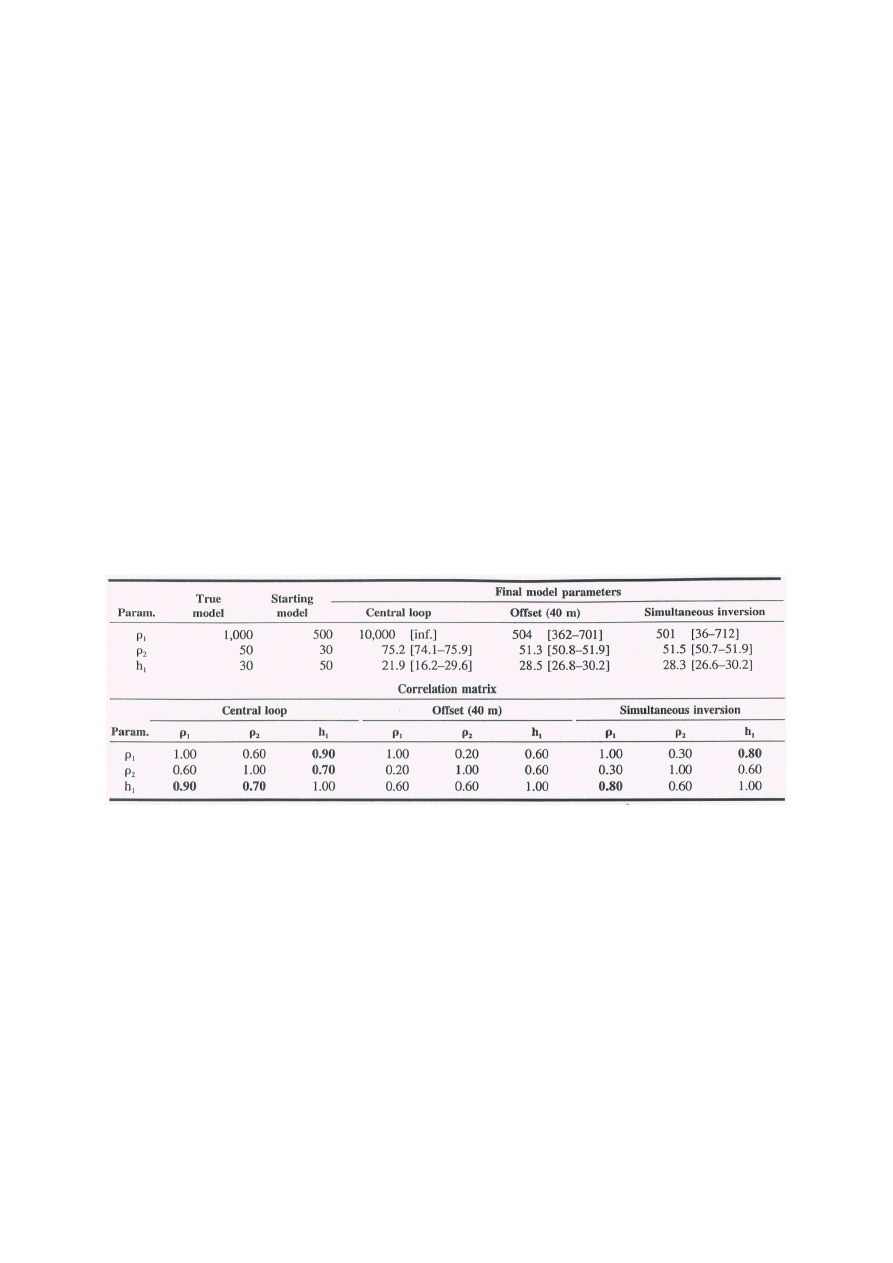
33
Wyniki interpretacji dla układu central loop wskazują na dobrą dokładność tej interpretacji
dla pierwszej warstwy. Wyinterpretowane oporność i miąższość dla drugiej warstwy są lekko
zawyżone. Dla układu pomiarowego z offsetem 40 metrów otrzymano podobne wyniki
interpretacji, natomiast dla układu z większym offsetem (60 m) oporność wyinterpretowana
drugiej warstwy jest bardzo zawyżona i zmienia się pomiędzy 14.4 a 14.9
Ω
m (podczas gdy
oporność rzeczywista ma wartość 3
Ω
m, rys. 20). Bardzo dobre rezultaty wyników
interpretacji uzyskuje się przy wykorzystaniu kombinacji układów pomiarowych central loop
i offset loop niezależnie od wielkości offsetu (40 i 60 metrów, tabela 33).
Dla modelu B, gdzie pierwsza warstwa jest b. wysokooporowa mamy do czynienia z efektem
IP. W tym przypadku wyniki interpretacji dla układów z offsetem są dużo bliższe modelowi
rzeczywistemu niż dla układu central loop (tabela 34). Dla tego układu wyinterpretowana
miąższość pierwszej warstwy jest zaniżona a oporność tej warstwy traktowana jako oporność
izolatora. Również wyinterpretowana oporność drugiej warstwy jest bardzo zawyżona (tabela
34).
Tabela 34. Rezultaty jednoczesnej inwersji 1D dla układu central loop i offset loop dla
modelu B (rys. 21)
Dla modelu C (rys. 22) gdzie mamy do czynienia ze strukturami 2D/3D najlepsze rezultaty
interpretacji 1D uzyskuje się dla układu central loop (tabela 35). Tutaj układ z offsetem daje
dużo gorsze rezultaty. Z kolei kombinacja dwóch układów (central loop i offset loop) daje
wyniki zadowalające. Widać, że układ central loop jest najmniej podatny na wpływ struktur
2D/3D.
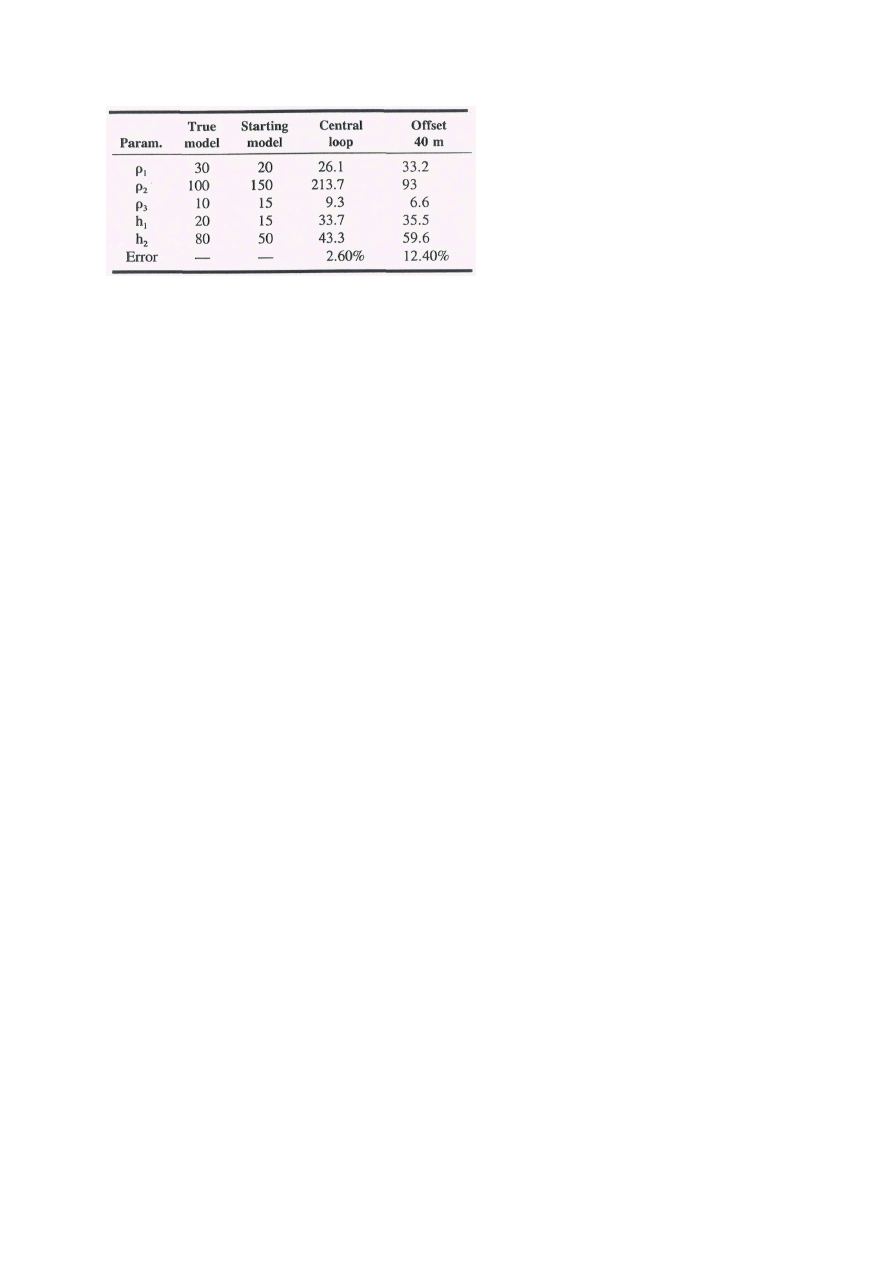
34
Tabela 35. Rezultaty jednoczesnej inwersji 1D dla układu central loop i offset loop dla
modelu C (rys. 22)
Analiza przykładów dla modeli A, B i C wskazuje, że oba układy użyte jednocześnie
pozwalają na bardziej efektywną interpretację dla modelu warstwowanego. Uzyskuje się
również lepszą rozdzielczość wyników interpretacji, redukcję efektu IP przy wykonywaniu
inwersji 1D jednocześnie dla układu central loop i offset loop a także redukcję efektu 2D/3D.
Jak widać kombinacja układów central loop i offset loop jest uniwersalna i taka metodyka
pomiarowa powinna być stosowana dla zapewnienia efektywności i odpowiedniej
rozdzielczości przy rozpoznawaniu zarówno głębokich jak i płytkich struktur (Krivochieva
and Chouteou, 2001).
5. Metoda procesów przejściowych w badaniach kompleksowych
Metoda TDEM to bardzo silne narzędzie służące rozpoznaniu środowiska
geoelektrycznego i może być efektywnie wykorzystywana w kompleksie z innymi metodami
elektromagnetycznymi. Ważne jest, że w tej metodzie eliminowanych jest wiele „zaburzeń”
występujących np. w metodzie MT, takich jak static shift (Jones, 1988) czy szerzej „galvanic
distortion” (Ledo et al., 2002). Dlatego metoda ta często jest używana jako metoda
towarzysząca metodzie MT w celu wprowadzenia poprawki na przesunięcie statyczne (Meju
M.A., 1996, 2002) i uzupełnienia metody MT np. dla zbadania płytkich struktur (Krivochieva
S., Chouteau M., 2003, Manzella A. et al., 2004).
Jednym z zastosowań metody TDEM jest jej wykorzystanie do rozpoznawania
ś
rodowiska hydrogeologicznego wraz z metodą magnetotelluryczną. Przykładem może być
wykorzystanie obu metod na przedmieściach miasta Meksyk (Krivochieva S., Chouteau M.,
2003). Celem badań było zapewnienie wody pitnej dla mieszkańców południowych
przedmieść miasta. Główne cele to: określenie geometrii formacji wodonośnej i określenie

35
przebiegu niżej leżących formacji. Zakres częstotliwości zastosowany w metodzie MT
wynosił od 300 Hz do 0,002 Hz. Metodą TDEM zostały wykonane płytkie badania (40*40,
rozmiar pętli nadawczej) i głębokie sondowania (100*100, rozmiar pętli nadawczej) w
zakresie
s
µ
88
do
ms
70
.
W badanym obszarze miały miejsce silne efekty galwaniczne zakłócające krzywe sondowań
MT. Zastosowana metoda TDEM umożliwiła analizę zjawiska „galvanic distortion” na tym
obszarze i wprowadzenie poprawki przy wykorzystaniu procedur dekompozycji. Dodatkowo
(oprócz zaburzeń galwanicznych) w badanym obszarze występuje zaburzenie danych MT w
przedziale częstotliwości 0,3 do 3 sekund - zaburzenie przez boczne struktury (anizotropia)
znajdujące się na głębokości 500 – 700 metrów. W rozpatrywanym obszarze metoda TDEM
pozwoliła na rozpoznanie trzech pierwszych warstw, co było niemożliwe w przypadku
metody MT. Pierwsza warstwa (miąższość:
m
50
26
−
) to piaskowce-ilaste o oporności
m
Ω
−
26
17
, druga warstwa to wysokooporowe bazalty (miąższość:
m
50
40
−
), trzecia
warstwa to gruba warstwa piaskowcowo-ilasta, poniżej są piaskowce (
m
600
400
−
,
m
Ω
−
30
6
) leżące na bazalcie spękanym ze słodką wodą a głębiej znajduje się
wysokooporowe podłoże. Wykonana została interpretacja 1D danych MT metodą OCCAMA
i inwersja 2D z uwzględnieniem wyników interpretacji danych TDEM dla pierwszych trzech
warstw z wprowadzeniem poprawki na zaburzenia galwaniczne. To umożliwiło efektywne
rozpoznanie i określenie geometrii ośrodka hydrogeologicznego i warstwy wodonośnej oraz
otaczającego środowiska geologicznego. Interpretacja danych MT i TDEM pozwoliła także
na wskazanie stref niskooporowych poniżej bazaltu (gdzie znajduje się warstwa ochronna
zasilona).
Metoda procesów przejściowych ma również zastosowanie w kompleksie z innymi
metodami geofizycznymi np. z metodą sejsmiczną. Przykładem takiego zastosowania jest
użycie obu metod w rozpoznaniu struktur rudnych węglanowo-potasowych w Ameryce
Północnej (Chouteau M. et al., 1997). Mamy tam do czynienia z sekwencją
płaskorównoległych warstw (model 1D) składających się z soli i anhydrytów zawierających
złoża węglanowo-potasowe. Obszar wydobycia znajduje się na głębokości 900-1100 metrów
przy czym pokłady mają grubość od
m
5
5
,
2
−
. Problemem jest tutaj oczywiście głębokość
złoża i jego mała miąższość, problemem górniczym jest również dopływ wody. Efektywność
rozpoznania ośrodka (w tym formacji wodonośnej) zapewniona została dzięki zastosowaniu
kompleksu metod sejsmicznych (sejsmika refrakcyjna i refleksyjna) jak i metod
elektromagnetycznych z których największą rolę odegrała metoda TDEM (w zakresie

36
czasowym od
ms
s
70
6
−
µ
). Metoda TDEM okazała się najlepsza ze względu na głębokość
penetracji i rozdzielczość pionową w rozpoznaniu środowiska hydrogeologicznego. Badania
wykonane zostały z chodnika zlokalizowanego powyżej badanego rejonu. Metoda TDEM
została zastosowana do kartowania formacji wodonośnej, która charakteryzuje się niską
opornością. Efektywność zastosowania metody TDEM (interpretacja 1D) okazała się wysoka
i formacja wodonośna o miąższości ok. m
5 i oporności poniżej
m
Ω
1
określona została w
odległości ok.
m
80
od chodnika. Badania w tym rejonie jak również w podobnym obszarze
górniczym w Brazylii wskazują, że przy zastosowaniu metody TDEM możliwe jest
osiągnięcie dużej rozdzielczości i przy niskiej oporności kompleksu wodonośnego możliwe
jest wykrycie tej warstwy o miąższości ok.
m
5
,
2
w odległości ok.
m
120 od chodnika.
Jak wcześniej wspomniano w Polsce na początku lat 90-tych poprzedniego wieku
zwrócono uwagę na możliwości zastosowania metody procesów przejściowych w kompleksie
z metodą elektrooporową przy monitorowaniu migracji zanieczyszczeń w warstwie
wodonośnej (Antoniuk et al., 1991). Wykazano wówczas, że metoda elektrooporowa daje
bardzo dobre rezultaty w sytuacji gdy warstwa wodonośna występuje we fragmencie K
przekroju geoelektrycznego jako warstwa środkowa. Kolektor nasycony wodą o naturalnej
mineralizacji zaznacza się na krzywych sondowań jako maksimum. Dopływ zanieczyszczeń i
zmniejszenie się oporności warstwy wodonośnej prowadzi najczęściej do zmiany sekwencji
oporności z typu K na Q lub H. W warunkach bardzo małej mineralizacji wody zaznacza się
przewaga metody elektrooporowej w rozpoznaniu tego ośrodka. W warunkach dużej
mineralizacji zaznacza się przewaga metody procesów przejściowych. Wynika to z tego, że w
takim przypadku rosną efekty indukcyjne na których bazuje ta metoda.
Literatura
Antoniuk J., Maćkowski T., Klityński W., 1991, Analiza rozdzielczości krzywych sondowań
elektrooporowych i procesów przejściowych w aspekcie monitorowania zanieczyszczeń wód
podziemnych, materiały konferencyjne, Jaworze, T.2 s.109-126.
Giovani Barrocu & Gaetano Ranieri, 2000, 16
th
Salt Water Intrusion Meeting, Międzyzdroje,
Poland,
12-15 June 2000.
Chauteau M., Philips G., Prugger A., 1997, Mapping and Monitoring Soft rock Mining,
Procedings of Exploration 97: Fourth Decennial International Conference on Mineral
Exploration, p. 927-940.
Chow-Son Chen and Shuhjong Tsao, 2001, Time-Domain Spectral IP and Its Applications in
the Southern Chinkuashih Area, Northern Taiwan, TAO, Vol. 12. No. 4, 483-586.

37
Descloitres M., Guerin R., Albobuy Y., Tabbagh A. and Ritz M., 2000, Improvement in
TDEM sounding interpretation of induced polarization. JA case study in resistive rocks of the
Fogo volcano, Cape Verde Islands, Journal of Applied Geophysics, Vol. 45, Issue 1, p. 1-18.
Jones, A., G., 1988. Static shift of magnetotelluric data and its removal in a sedimentary basin
environment, Geophysics, 53, 967-97.
Kauffman A.A. and Keller G.V., 1983, Frequency and Transient Soundings, Elsevier
Amsterdam, Methods in Geochemistry and Geophysics, No. 16, 685 p.
Keller G.V., Pritchard J.I., Jacobson J.J. and Harthill N., 1984, Megasource Time-domain
Electromagnetic Sounding Methods, Geophysics ol. 49, No. 7, p. 993-1009.
Keller G.V., 1997, Principles of time-domain electromagnetic (TDEM) sounding, The
Leading Edge, April 1997, v. 16 no. 4; p 355-357.
Klityński W., Miecznik J., 1998, Kartowanie podłoża wysokooporowego metodą procesów
przejściowych, Nafta – Gaz, nr 1/1998
Krivochieva S., Chouteau M., 2001, Improvement in 1D TDEM Interpretation by
Simultaneous Inversion of Data from Two Loop Configurations. JEEG, Vol. 6, Issue 1, pp.
19-32.
Krivochieva S., Chouteau M., 2003, Integrating TDEM and MT methods for characterization
and delineation of the Santa Catarina aquifer (Chalco sub-Basin, Mexico), Journal of Applied
Geophysics, Vol. 53, Issue 1, p. 23-43.
Ledo, J., P. Queralt, and J. Pous, 1998. Galvanic Distortion on magnetotelluric data over a
3-D regional structure Geophys. J. Int., 132, 295-301.
Manzella A., Volpi G., Zaja A., Meju M., 2004, Combined TEM-MT investigation of
shallow-depth resistivity structure of Mt Somma-Vesuvius, Journal of Volcanology and
Geothermalresearch 131, p. 19-32.
Meju M.A, 1996, Joint inversion of TDEM and distorted MT soundings: some effective
practical considerations, Geophysics, 61 91, p. 56-65.
Meju M.A, 2002, Geoelectromagnetic exploration for natural resources: models case studies
and Challenges. Surv. Geophysics, 23, p. 133-205.
Nagendra Pratap Singh and Toru Mogi, 2003, Effective skin depth of EM fields due to large
circular loop and electric dipole sources, Earth Planets Space, 55, 301-313.
Papadopoulos, P. Tsourlos, P. Karmis, G. Vargemeziz and G.N. Tsokas, 2004, A TDEM
survey to define local hydrogeological structure In Anthemountas Basin, N. Greece, Journal
of Balkani Geophysical Society, Vol. 7, No. 1, p. 1-11.
Parasnis , D.S., 1986, Principles of applied geophysics: Chapman and Hall, 402 p.

38
Kenneth L. Zonge, 1993, Introduction to TDEM, Practical Geophysics II, Northwest Mining
Association. Zonge Engineering and Mearch Organization Inc, USA.
Wyszukiwarka
Podobne podstrony:
Metoda?licji?folter w procesie uczenia
Metoda procesu polaryzacji wzbudzonej
Adaptacja do nowego miejsca jako proces przejścia esej zaliczeniowy
Wdrażanie SZJ metodą procesową, Wdrażanie SZJ metodą procesową
Modelowanie procesów przejściowych w silnikach indukcyjnych
Metoda?licji?folter w procesie uczenia
Maria Jankowska Dorastanie procesem przejścia z dzieciństwa ku dorosłości
Prawidłowości prognozowanie metoda proces prognozowania
PRACA PRZEJŚCIOWA OPTYMALIZACJA PROCESÓW ENERGETYCZNYCH POPRZEZ ZASOTOWANIE NOWOCZESNYCH ALGORYTMÓW
Proces pielęgnowania jako metoda pracy
Identyfikacja Procesów Technologicznych, Identyfikacja parametrycznarekurencyjną metodą najmniejszyc
Identyfikacja Procesów Technologicznych, 06 Metoda Momentów pelna
Identyfikacja Procesów Technologicznych 05.Metoda momentów
Identyfikacja Procesów Technologicznych, 05 Metoda momentów
Metoda QFD w procesie zarządzania jakością w predsiębiorstwie
Metoda ABC-koszty, Proces - zrządzanie
Spawanie to jeden z najbardziej znanych i rozpowszechnionych procesów technologicznych, Mechanika, S
więcej podobnych podstron