1
Mechanika teoretyczna
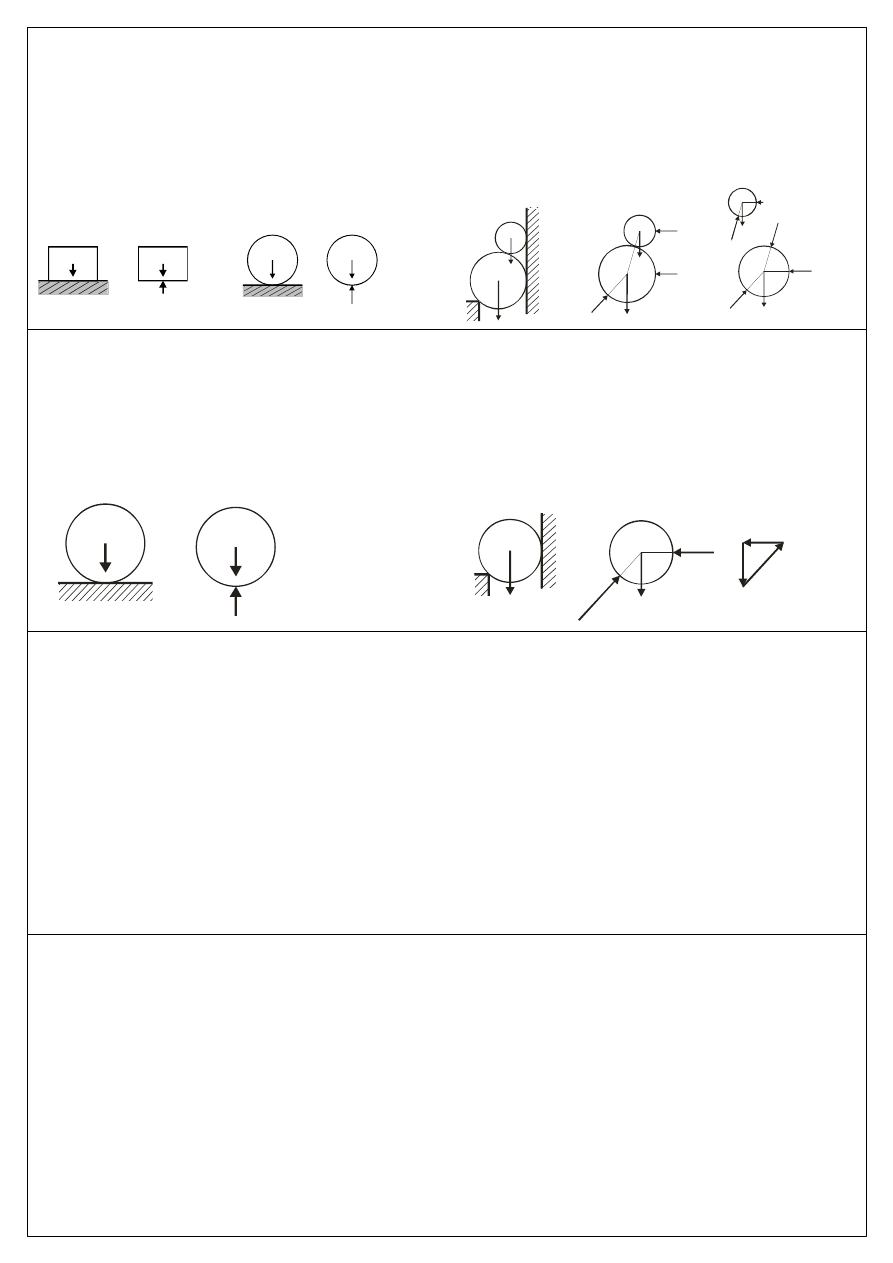
Wykład nr 1
Wprowadzenie i podstawowe pojęcia.
Rachunek wektorowy.
Wypadkowa układu sił.
Warunki równowagi
Przedmiot
n
Mechanika:
– ogólna, techniczna, teoretyczna.
n
Dział fizyki zajmujący się badaniem
ruchu i równowagi ciał materialnych,
ustalaniem ogólnych praw ruchu oraz ich
stosowaniem do wyidealizowanych ciał
rzeczywistych (punkt materialny oraz
ciało doskonale sztywne – ramy, kraty).
2
Program zajęć
(1)
n
Podstawowe pojęcia.
n
Podstawy rachunku wektorowego.
n
Układy sił i stan równowagi.
n
Reakcje więzów w układach
płaskich.
n
Siły wewnętrzne
– w belkach;
– w ramach.
3
Program zajęć
(2)
n
Siły wewnętrzne:
– w kratownicach;
– w łukach;
n
Reakcje więzów i siły wewnętrzne
w układach przestrzennych.
n
Zjawisko tarcia i prawa tarcia.
n
Elementy kinematyki.
n
Podstawy dynamiki.
4
Literatura
n
[1] J. Leyko: Mechanika ogólna
n
[2] J. Leyko: Mechanika ogólna w zadaniach
n
[3] J. Misiak: Mechanika ogólna, T. 1-3
(Statyka, Kinematyka, Dynamika)
n
[4] J. Misiak: Zadania z mechaniki ogólnej
n
[5] A. Chudzikiewicz: Statyka budowli
(Tom 1)
n
[6] Z. Cywiński: Mechanika budowli w
zadaniach. Uk
łady statycznie wyznaczalne
5
Zaliczenie
n
Ćwiczenia:
– obecności;
– ćwiczenie projektowe;
– kolokwia.
n
Egzamin:
– część pisemna;
– część ustna.
6
Działy mechaniki
n
Statyka – bada przypadki, kiedy siły działające na
ciało nie wywołują sił bezwładności, tj. są
przykładane w nieskończenie długim czasie oraz
równoważą się wzajemnie.
n
Kinematyka – zajmuje się badaniem ruchu ciał
niezależnie od czynników wywołujących ten ruch.
Przedmiotem badań są: droga, prędkość,
przyspieszenie itd.
n
Dynamika – rozpatruje ruch ciał w zależności od sił
działających na nie, bada zależności między takimi
wielkościami jak: prędkość, przyspieszenie, pęd, siła,
energia itd.
7
Zasady dynamiki Newtona
(1)
n
Prawo I
Punkt materialny, na który nie działa
żadna siła lub działające siły
równoważą się, pozostaje w spoczynku
lub porusza się ruchem jednostajnym
po linii prostej.
8
Zasady dynamiki Newtona
(2)
n
Prawo II
Przyspieszenie punktu materialnego jest
wprost proporcjonalne do siły działającej
na ten punkt, a odwrotnie proporcjonalne
do masy punktu materialnego. Jego
zwrot i kierunek zgodny jest ze zwrotem i
kierunkiem wektora siły.
P = m a
P
a
m
9
Zasady dynamiki Newtona
(3)
n
Prawo III
Dwa punkty materialne działają na
siebie dwoma siłami równymi co do
wartości, tym samym kierunku, ale o
przeciwnym zwrocie.
P
1
P
2
2
1
P
P
=
2
1
P
P
−
=
10
Idealizacje (1)
n
Punkt materialny – ciało o
nieskończenie małych wymiarach, ale
posiadające masę.
n
Modeluje ciała o bardzo małych
wymiarach w porównaniu z wymiarami
otoczenia.
n
Wymiary na tyle małe, aby można było
pominąć obrót ciała względem układu
odniesienia.
11
Idealizacje (2)
n
Ciało doskonale sztywne –
odległości między jego punktami nie
zmieniają się (nie podlega
odkształceniom pod wpływem
działających sił).
n
Model ciała rzeczywistego, gdy
odkształcenia są pomijalnie małe w
stosunku do wymiarów.
12
Idealizacje (3)
n
Zasada zesztywnienia
Warunki równowagi sił działających
na ciało odkształcalne nie zostaną
naruszone przez zesztywnienie tego
ciała.
Punkt przyłożenia siły nie ulega
przesunięciu mimo odkształcenia
konstrukcji.
13
Zasada superpozycji
n
Działania poszczególnych obciążeń są
od siebie niezależne.
n
Efekt działania (odkształcenie, siła
wewnętrzna) dwóch lub więcej
wpływów (obciążeń) może zostać
wyznaczony jako suma efektów
wywołanych działaniem tych wpływów
oddzielnie.
14
Skalar i wektor
n
Skalar – do opisania niezbędne jest
podanie jednej wartości w odniesieniu
do określonego punktu w przestrzeni.
n
Wektor – do opisania poza miarą
(modułem, długością wektora),
niezbędne jest podanie:
– kierunku (ułożenia linii działania),
– zwrotu (uporządkowania punktów od
początku do końca wektora),
– punktu zaczepienia.
15
Interpretacja geometryczna,
przykłady
n
Wektor można przedstawić jako
uporządkowaną parę punktów, z
których jeden jest początkiem wektora,
a drugi jego końcem.
n
Skalary:
– gęstość, masa, temperatura, energia;
n
Wektory
– przemieszczenie, prędkość, przyspieszenie,
siła.
16
Rodzaje wektorów
n
Wektory zaczepione – związane z
punktem przyłożenia;
n
Wektory ślizgające się – mogące
poruszać się wzdłuż linii działania (np.
wektory sił w mechanice);
n
Wektory swobodne – mogą zostać
przyłożone w dowolnym punkcie (np.
wektory momentów sił).
17
Podstawowe jednostki
n
Masa: g (gram); kg = 1000 g (kilogram)
n
Długość: mm = 0,001 m (milimetr);
m (metr); km = 1000 m (kilometr)
n
Czas: s (sekunda); min = 60 s (minuta);
h = 60 min = 3600 s (godzina)
n
Siła: N = kg m/s2 (niuton);
kN = 1000N (kiloniuton)
n
Moment siły: Nm (Niutonometr);
kNm = 1000Nn (kiloniutonometr)
18
Działania na wektorach
n
Suma wektorów;
n
Różnica wektorów;
n
Mnożenie wektora przez skalar;
n
Iloczyn wektorów:
– skalarny;
– wektorowy;
– mieszany;
– inne wielokrotne iloczyny wektorów.
19
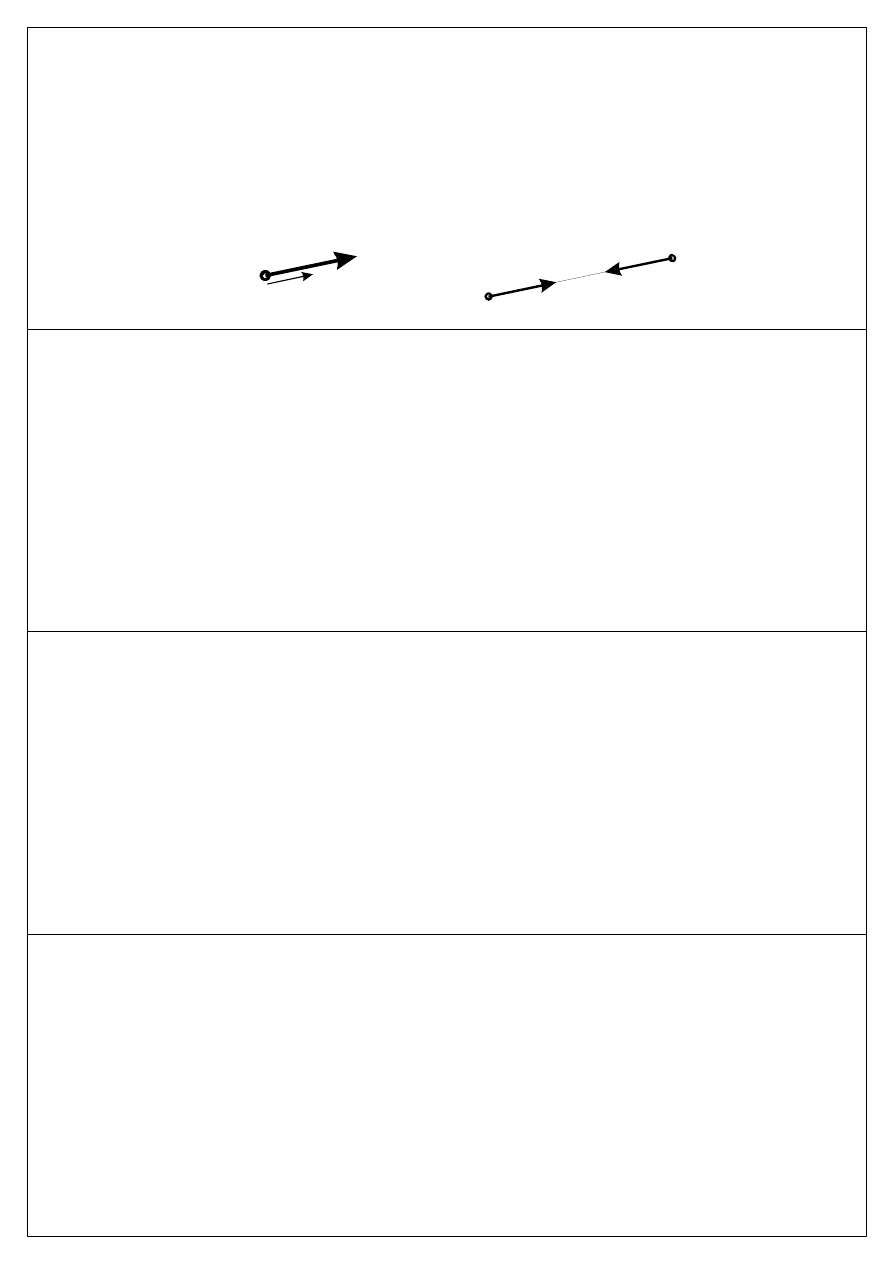
Zapis analityczny
i graficzny wektora
n
płaszczyzna
n
przestrzeń
20
x
y
a
y
a
x
a
i
j
[
,
]
x
y
a a
=
a
x
y
a
a
=
+
a
i
j
2
2
x
y
a
a
a
=
+
y
z
a
z
a
y
a
k
x
j
i
a
z
[
,
,
]
x
y
z
a a a
=
a
x
y
z
a
a
a
=
+
+
a
i
j
k
2
2
2
x
y
z
a
a
a
a
=
+
+
Dodawanie wektorów
]
,
,
[
z
y
x
a
a
a
=
a
]
,
,
[
z
y
x
b
b
b
=
b
]
,
,
[
z
z
y
y
x
x
b
a
b
a
b
a
+
+
+
=
c
a
b
b
a
c
+
=
+
=
n
Suma wektorowa wektorów
a
i
b
:
a
b
c
21
Twierdzenie cosinusów
n
Kwadrat długości boku trójkąta leżącego
naprzeciw kąta
γ jest równy sumie
kwadratów długości boków leżących
przy tym kącie oraz podwojonego
iloczynu tych długości boków i cosinusa
tego kąta
γ.
γ
cos
2
2
2
ab
b
a
c
−
+
=
a
c
b
α
β
γ
22
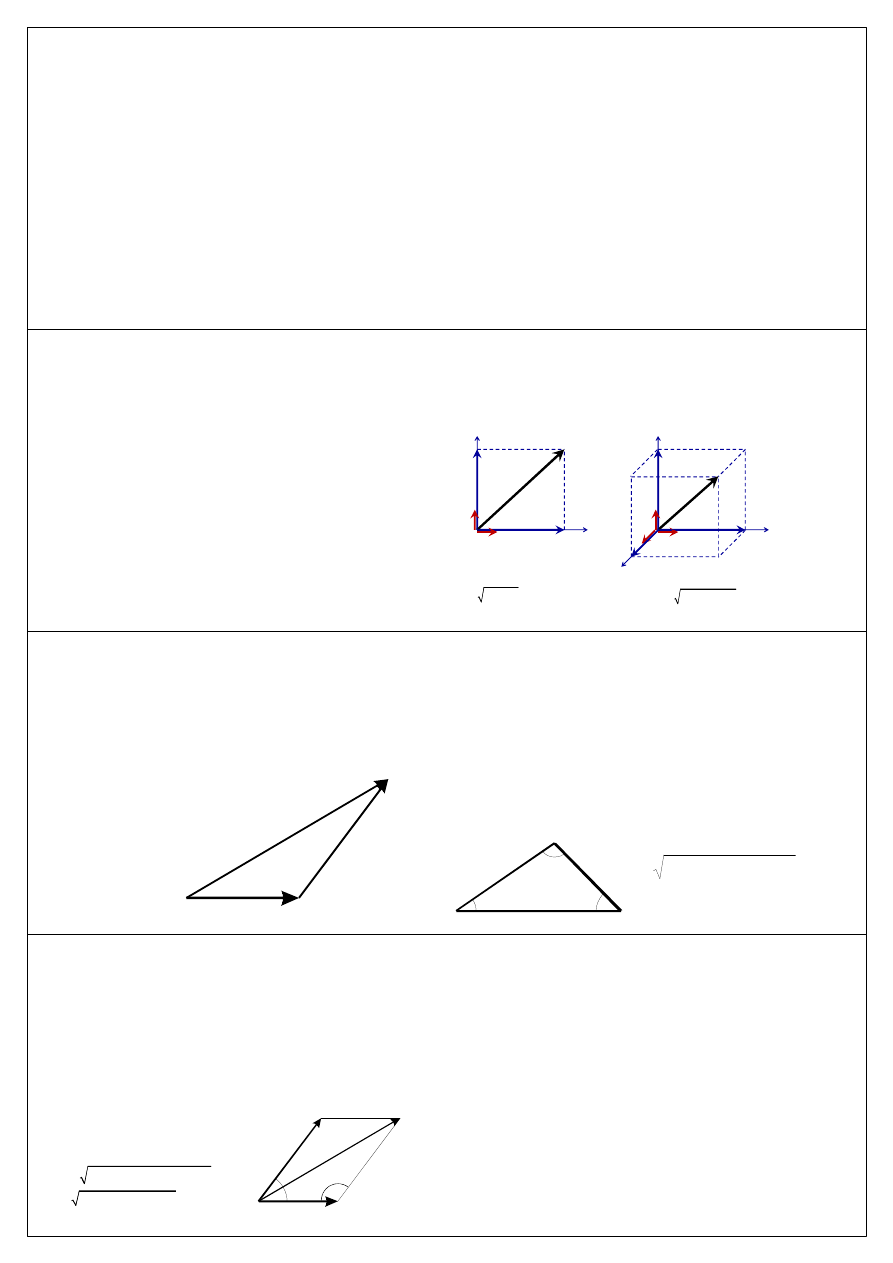
Zasada równoległoboku
n
Suma dwóch wektorów może zostać
przedstawiona jako przekątna
równoległoboku zbudowanego na
bazie sumowanych wektorów
przecinająca kąt między tymi
wektorami.
2
2
2
2
2
cos(
)
2
cos
c
a
b
ab
a
b
ab
π α
α
=
+
−
−
=
=
+
+
a
b
α
c
π α
−
23
Odejmowanie wektorów
(1)
n
Różnica wektorów
a
i
b
jest równa
sumie wektora
a
i wektora
przeciwnego do
b
:
]
,
,
[
z
y
x
b
b
b
−
−
−
=
−
b
]
,
,
[
z
z
y
y
x
x
b
a
b
a
b
a
−
−
−
=
−
=
b
a
c
]
,
,
[
z
y
x
a
a
a
=
a
]
,
,
[
z
y
x
b
b
b
=
b
n
Różnica wektorów b i a jest równa sumie
wektora b i wektora przeciwnego do a:
]
,
,
[
z
y
x
a
a
a
a
−
−
−
=
−
]
,
,
[
z
z
y
y
x
x
a
b
a
b
a
b
−
−
−
=
−
=
a
b
d
24
Odejmowanie wektorów
(2)
a
-b
c
b
a
-a
d
b
( )
b
a
b
a
c
−
=
−
+
=
( )
a
b
a
b
d
−
=
−
+
=
25
Skalowanie wektora
n
Mnożenie wektora przez skalar (n) – wyniku otrzymuje
się wektor o takim samym kierunku, mierze n razy
większej (przy |n|>1)
n>1
n
lub 1/n razy mniejszej (przy |n|<1) i takim samym
zwrocie, jeżeli n>0,
0<n<1
n
zaś przeciwnym, jeżeli n<0.
-1<n<0
n<-1
a
n a
·
a
n
a
·
a
n a
·
a
n a
·
26
Iloczyn skalarny
(1)
n
Iloczyn skalarny – wielkość skalarna
równa iloczynowi modułów mnożonych
wektorów i cosinusa kąta zawartego
między nimi (iloczyn miary jednego
wektora przez rzut prostokątny
drugiego na kierunek pierwszego).
27
Iloczyn skalarny
(2)
]
,
,
[
z
y
x
a
a
a
=
a
]
,
,
[
z
y
x
b
b
b
=
b
cos ( , )
x
x
y
y
z
z
s
a b
a b
a b
a b
=
= ⋅ ⋅
=
+
+
a b
a b
o
S
a
b
α
b cos
α
a
co
s
α
28
Iloczyn wektorowy
(1)
n
Iloczyn wektorowy (wektor):
– kierunek prostopadły do płaszczyzny
wyznaczonej przez mnożone wektory,
– zwrot określony zgodnie z regułą śruby
prawoskrętnej,
– miara równa iloczynowi miar mnożonych
wektorów i sinusa kąta między nimi (pole
powierzchni równoległoboku
zbudowanego na mnożonych wektorach).
29
Iloczyn wektorowy
(2)
]
,
,
[
z
y
x
a
a
a
=
a
]
,
,
[
z
y
x
b
b
b
=
b
b
a
c
×
=
a
b
d
×
=
c
d
−
=
(
)
(
)
(
)
2
2
2
sin
( , )
y
z
z
y
z
x
x
z
x
y
y
x
c
d
a b
a b
a b
a b
a b
a b
a b
a b
S
= = ⋅ ⋅
=
−
+
−
+
−
c
i
j
k
=
a
a
a
b
b
b
x
y
z
x
y
z
z
y
x
z
y
x
a
a
a
b
b
b
k
j
i
d
=
a
b
c
α
a
b
d
α
30
(
)
(
)
(
)
y
z
z
y
z
x
x
z
x
y
y
x
a b
a b
a b
a b
a b
a b
c
i
j
k
=
−
+
−
+
−
Iloczyn mieszany
n
Iloczyn mieszany – wielkość
skalarna równa objętości
równoległościanu zbudowanego na
mnożonych wektorach jako na
krawędziach.
c
b
a
o
)
(
×
=
V
a
b
c
d
α
β
α
sin
ab
d
=
β
α cos
sin
c
ab
V
⋅
=
β
cos
c
d
V
⋅
=
=
c
d
o
31
Przemienność działań
n
Suma wektorów i iloczyn skalarny są
działaniami przemiennymi, natomiast
różnica wektorów i iloczyn wektorowy
nie są przemienne.
a – b = c
b – a = d =>
d = -c
a
× b = c
b
× a = d => d = -c
32
Pojęcie siły
n
Siła – wzajemne oddziaływanie ciał,
które przejawia się w wyprowadzeniu
ciała ze stanu spoczynku, bądź przez
zmianę ruchu już poruszającego się
ciała. Aby scharakteryzować siłę
należy podać wektor, opisujący tą siłę,
oraz punkt przyłożenia siły.
33
Układy sił
n
Układ sił – dowolna grupa oddziaływań
ciał zewnętrznych na analizowane ciało.
n
Równoważne układy sił
Dwa układy sił są równoważne wtedy,
gdy zastąpienie jednego układu,
działającego na ciało sztywne, przez
drugi układ sił nie wywoła zmiany
ruchu, czyli nie spowoduje zmiany
kierunku ruchu, prędkości,
przyśpieszenia, itd.
34
Wypadkowa
n
Siła wypadkowa – wektor, który jest
sumą wszystkich wektorów sił z
układu, przyłożonego do punktu
materialnego i stanowi układ
równoważny, pod warunkiem, że siła
wypadkowa jest przyłożona do tego
samego punktu materialnego.
35
Płaski i przestrzenny
układ sił
n
Układ sił nazywamy płaskim, jeżeli
kierunki wszystkich sił tego układu
położone są w jednej płaszczyźnie.
n
W każdym innym przypadku układ
nazywamy przestrzennym.
36
Układ sił zbieżnych
n
Układ sił zbieżnych – linie działania
wszystkich sił przecinają się w jednym
punkcie, tzw. punkcie zbieżności.
n
Określanie wypadkowej układu sił:
– działających wzdłuż jednej prostej;
– zbieżnych
n
metoda graficzna;
n
metoda analityczna.
37
Siły działające wzdłuż
jednej prostej
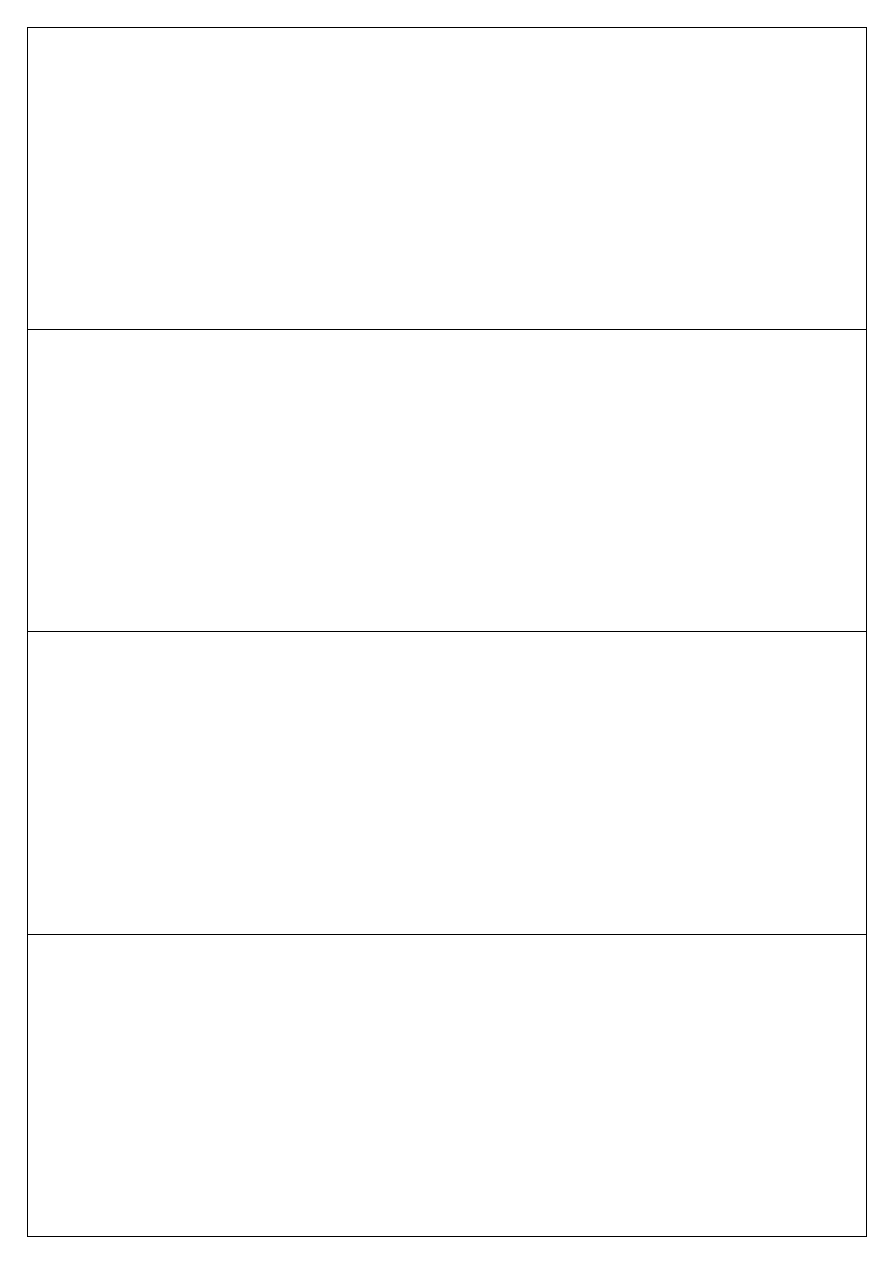
n
Wypadkowa układu sił działających wzdłuż
jednej prostej jest wektorem o także
działającym wzdłuż tej prostej, zwrocie
zgodnym z większą ze składanych sił i mierze
równej sumie, gdy miary wektorów
składowych są zgodne, lub różnicy miar
wektorów składowych, gdy zwroty
składowych są przeciwne.
P
1
P
2
W
P
1
P
2
W
2
1
P
P
W
+
=
2
1
P
P
W
−
=
38
Wypadkowa
- metoda graficzna
n
Wypadkowa układu dwóch sił może zostać
wyznaczona jako przekątna równoległoboku
zbudowanego w oparciu o wektory
składowe przecinająca kąt między tymi
wektorami.
P
1
P
2
α
P
1
P
2
α
π−α
P
2
W
W
α
α
π
cos
2
)
cos(
2
2
1
2
2
2
1
2
1
2
2
2
1
P
P
P
P
P
P
P
P
W
+
+
=
=
−
−
+
=
39
Wielobok sznurowy
n
Do końca pierwszej siły przykładany jest
początek siły następnej, itd. Początek
pierwszej siły połączony z końcem
ostatniej określa wypadkową.
P
1
P
2
W
P
3
P
4
P
1
P
2
P
3
P
4
40
Rozkładanie siły na
składowe
n
Przez początek i koniec danej siły
przeprowadza się kierunki, na które siła
ma zostać rozłożona. Siły składowe
mogą zostać wyznaczone jako boki tak
zbudowanego równoległoboku.
α
P
β
P
1
P
2
P
1
2
α
β
41
Twierdzenie sinusów
n
W dowolnym trójkącie stosunek
długości boku do sinusa
przeciwległego kąta jest stały i równa
się długości średnicy okręgu opisanego
na trójkącie.
R
a
c
b
α
β
γ
R
c
b
a
2
sin
sin
sin
=
=
=
γ
β
α
42
Miary wektorów
składowych
(
)
(
)
β
α
π
α
β
+
−
=
=
sin
sin
sin
2
1
P
P
P
(
)
(
)
(
)
β
α
β
β
α
π
β
+
=
+
−
=
sin
sin
sin
sin
1
P
P
P
(
)
(
)
(
)
β
α
α
β
α
π
α
+
=
+
−
=
sin
sin
sin
sin
2
P
P
P
2
π
β
α
=
+
α
π
α
π
cos
2
sin
2
sin
P
P
P
x
=
−
=
α
π
α
sin
2
sin
sin
P
P
P
y
=
=
P
1
P
2
α
P
β
π−(α+β)
P
2
β
P
x
P
y
P
α
π/2−α
43
Wypadkowa
- metoda analityczna
n
Składowe sił układu:
n
Składowe wypadkowej:
n
Siła wypadkowa:
n
Kierunek wypadkowej:
i
i
ix
P
P
α
cos
=
i
i
iy
P
P
α
sin
=
nx
x
x
x
P
P
P
W
+
+
+
=
...
2
1
ny
y
y
y
P
P
P
W
+
+
+
=
...
2
1
2
2
y
x
W
W
W
+
=
W
W
x
=
α
cos
W
W
y
=
α
sin
44
Przykład
x
y
P
1x
P
1y
P
1
P
2x
P
2
P
2y
P
3x
P
3y
P
3
P
1
P
2
P
3
W
W
W
x
W
y
α
α
1
α
3
α
2
45
Wypadkowa układu sił
równoległych
n
Przyłożenie układu
zerowego (układ sił
równoważących się,
np. dwie siły o
takiej samej mierze,
linii działania i
przeciwnych
zwrotach) nie
wpływa na stan
równowagi ciała.
46
W
P
1
P
2
Z
Z
Z
Z
W
2
W
1
W
1
W
2
P
2
P
1
P
1
P
2
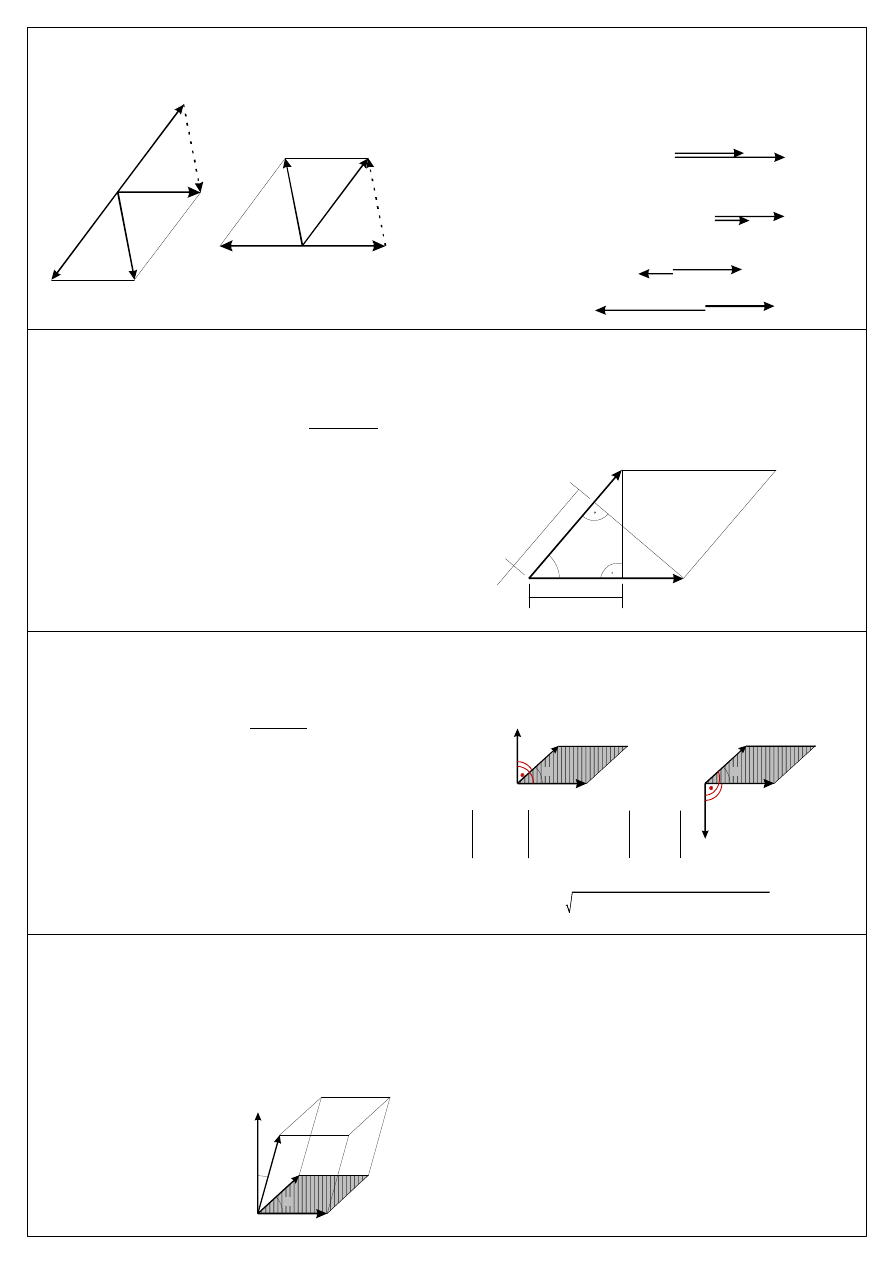
Moment siły
(1)
n
Moment siły względem punktu – iloczyn
wektorowy promienia wodzącego, czyli
wektora łączącego omawiany punkt i punkt
przyłożenia siły, oraz wektora siły:
P
r
M
×
=
P
O
α
sin
P
r
M
P
O
⋅
=
α
sin
⋅
=
⊥
r
r
P
r
M
P
O
⋅
=
⊥
47
O
P
r
r
┴
α
α
Moment siły
(2)
n
Moment siły względem prostej - Momentem
względem prostej nazywamy iloczyn wektorowy
promienia wodzącego, czyli wektora łączącego
punkt prostej najbliższy kierunkowi siły i punkt
przyłożenia siły, i wektora siły.
P
′
P
r
′
r
r
⊥
′
z
π
n
Moment siły
względem osi równy
jest momentowi rzutu
siły na płaszczyznę
prostopadłą do osi
względem punktu, w
którym oś przebija
płaszczyznę.
48
z
′
′
= × = ×
M
r P
r
P
z
M
P r
⊥
′
′
= ⋅
Para sił
n
Parę sił stanowią dwie siły o równoległych
liniach działania, o przeciwnych zwrotach,
zaś o tych samych miarach.
n
Ramię pary sił – odległość pomiędzy
kierunkami sił nosi nazwę ramienia pary sił.
P
P
P
=
=
2
1
Pa
M
=
P
1
P
2
a
49
P
z
P
M
a
Dowolny płaski układ sił
(1)
n
Redukcja do siły wypadkowej
przyłożonej w biegunie redukcji i
wypadkowego momentu względem
tego bieguna.
n
Siły składowe mogą zostać
przeniesione do bieguna redukcji,
pod warunkiem przyłożenie
momentu od tych sił względem
bieguna redukcji.
50
Dowolny płaski układ sił
(2)
n
Wypadkową siłę wyznacza się dla układu
zbieżnego przyłożonego w biegunie
redukcji.
n
Wypadkowy moment jest równy sumie
momentów od sił składowych.
1
n
i
i
=
=
∑
W
P
1
1
n
n
o
i
i
io
i
i
=
=
=
× =
∑
∑
M
r
P
M
51
Przykład
(1)
x
y
P
2x
P
2
P
2y
P
3x
P
3y
P
3
α
3
α
2
P
1x
P
1y
P
1
α
1
(x ,y )
1
1
(x ,y )
3
3
(x ,y )
2
2
0
52
Przykład
(2)
x
y
P
1x
P
1y
P
1
P
2x
P
2
P
2y
P
3x
P
3y
P
3
α
1
α
3
α
2
P
1
M
P1
0
0
1
1
1
1
1
0
x
P
y
P
M
y
x
P
+
−
=
53
Przykład
(3)
x
y
P
1x
P
1y
P
1
P
2x
P
2
P
2y
P
3x
P
3y
P
3
α
1
α
3
α
2
M
P2
0
0
P
2
2
2
2
2
2
0
x
P
y
P
M
y
x
P
+
−
=
54
Przykład
(4)
x
y
P
1x
P
1y
P
1
P
2x
P
2
P
2y
P
3x
P
3y
P
3
α
1
α
3
α
2
M
P3
0
0
P
3
3
3
3
3
3
0
x
P
y
P
M
y
x
P
+
−
=
55
Przykład
(5)
x
y
P
1x
P
1y
P
1
P
2x
P
2
P
2y
P
3x
P
3y
P
3
α
1
α
3
α
2
M
0
0
W
2
3
=
+
+
1
W
P
P
P
56
3
0
2
0
1
0
0
P
P
P
M
M
M
M
+
+
=
Dowolny płaski układ sił
(3)
n
Wypadkowy moment może zostać
przedstawiony jako:
– wektor momentu;
– para sił;
– moment od siły wypadkowej przyłożonej
nie w biegunie redukcji, a na linii
działania wyznaczonej w taki sposób, że
moment od siły wypadkowej równy jest
momentowi od sił składowych.
57
Siła wypadkowa
i wypadkowy moment
58
2
3
=
+
+
1
W
P
P
P
3
0
2
0
1
0
0
P
P
P
M
M
M
M
+
+
=
Moment od wypadkowej
59
0
0
0
x
W
y
W
M
y
x
+
−
=
x
y
W
M
x
W
y
0
0
0
−
=
x
W
M
x
y
0
0
0
tg
−
=
α
Uogólnienie w przestrzeni
n
Układ sił zbieżnych – redukcja do siły
wypadkowej przyłożonej w punkcie
zbieżności.
n
Dowolny przestrzenny układ sił
– redukcja do wypadkowej siły
i wypadkowego momentu.
60
Klasyfikacja układów sił
61
Układ sił -
układ wypadkowy
Płaszczyzna
Przestrzeń
Zbieżny
Siła wypadkowa w
płaszczyźnie
Siła wypadkowa –
dowolny kierunek w
przestrzeni
Dowolny
Siła wypadkowa w
płaszczyźnie i wektor
momentu
prostopadły do
płaszczyzny
Siła wypadkowa
(dowolny kierunek w
przestrzeni) i
wypadkowy wektor
momentu (dowolny
kierunek w
przestrzeni)
62
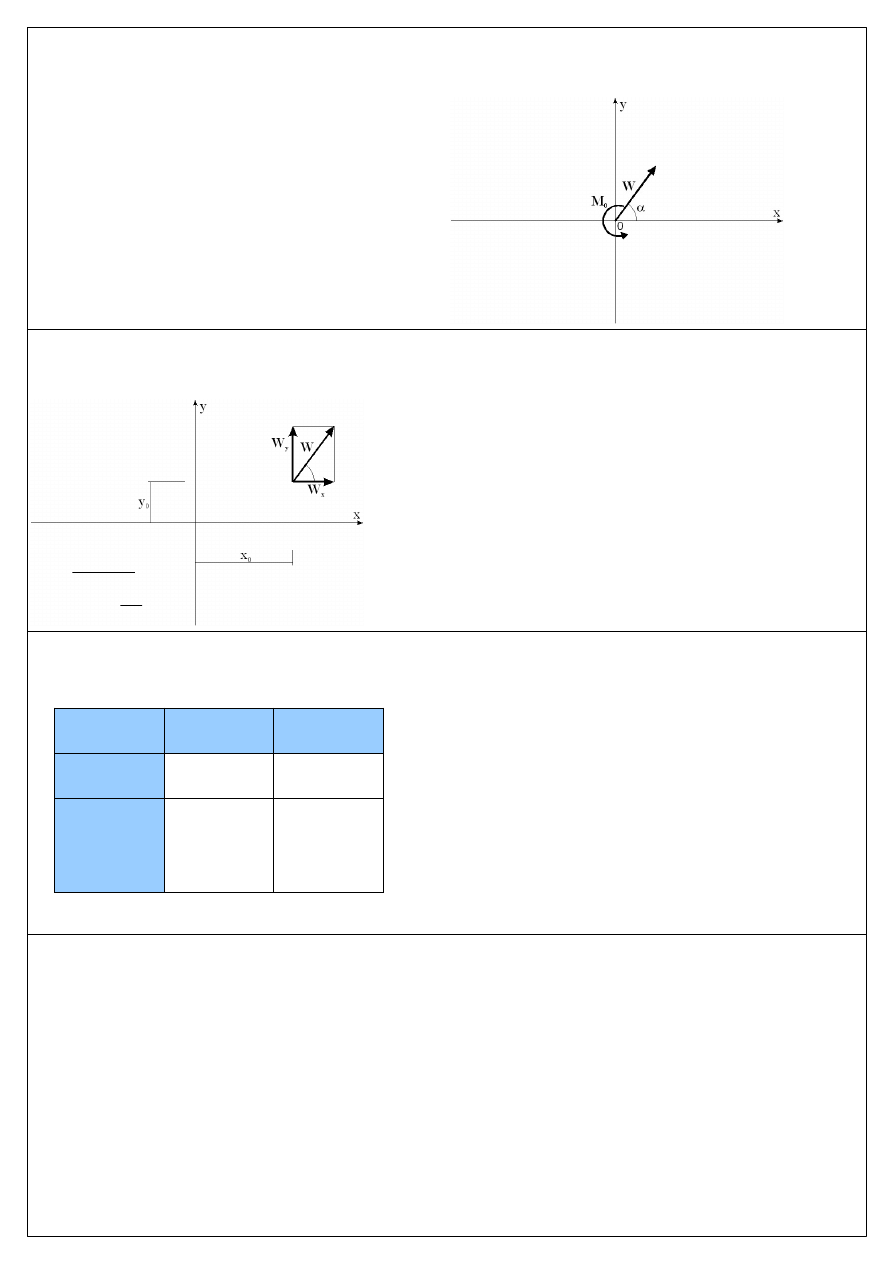
Stan równowagi
n
Równowaga statyczna
Punkt materialny (ciało sztywne) jest
w równowadze, jeżeli pod wpływem
układu sił, nie porusza się on lub
porusza się ruchem jednostajnym
prostoliniowym. Taki układ sił nazywa
się zrównoważonym lub
równoważnym zeru.
63
Oswobodzenie z więzów
n
Ciało nieswobodne można myślowo
oswobodzić z więzów, zastępując ich
działanie reakcjami.
n
Ciało oswobodzone z więzów można
traktować jako swobodne pod
działaniem sił czynnych (obciążeń) i
biernych (reakcji).
64
Rodzaje sił w mechanice
n
W mechanice wyróżnia się następujące
rodzaje sił:
– siły zewnętrzne - obciążenie
pochodzące od innych ciał;
– reakcje - siły zewnętrzne wynikające ze
sposobu zamocowania konstrukcji;
– siły wewnętrzne - wzajemne
oddziaływanie pomiędzy częściami ciała.
65
Więzy – nacisk
(1)
n
Powierzchnia płaska na płaszczyźnie:
– reakcja prostopadła do płaszczyzny styku;
n
Przekrój kołowy na płaszczyźnie:
– reakcja prostopadła do płaszczyzny styku
(stycznej w punkcie styczności);
G
R
G
G
G
R
66
Więzy – nacisk
(2)
n
Przekrój kołowy oparty o przekrój kołowy:
– reakcja prostopadła do stycznej obu ciał w
punkcie styku (wzdłuż prostej łączącej środki
okręgów);
n
Punkt na płaszczyźnie:
– reakcja prostopadła do płaszczyzny.
G
A
B
C
Q
G
A
B
C
Q
R
A
R
B
R
C
R
A
Q
R
C
R
D
R
D
G
R
B
67
Równowaga dwóch sił
n
Układ dwóch sił pozostaje w
równowadze, jeżeli siły te działają
wzdłuż jednej prostej, mają przeciwne
zwroty i takie same miary.
G
R
=
G
R
−
=
G
G
R
68
Równowaga trzech sił
n
Układ trzech sił jest zrównoważony,
jeżeli siły te tworzą płaski układ sił, ich
linie działania przecinają się w jednym
punkcie (układ zbieżny), zaś wielobok
sił jest zamknięty.
G
A
B
R
B
G
R
A
R
B
R
A
G
69
Równania równowagi
punktu materialnego
n
II zasada dynamiki Newtona:
n
Jeżeli punkt materialny jest w stanie
równowagi statycznej, to:
P
a
=
m
a
P
=
⇒
=
0
0
70
Równania równowagi ciała
sztywnego (siły zbieżne)
n
II zasada dynamiki Newtona:
n
Jeżeli punkt materialny jest w stanie
równowagi statycznej, to:
P
P
P
P
P
a
1
2
3
4
n
+
+
+
+.......
=
m
a
P
=
⇒
=
∑
0
0
i
i=1
n
71
Układ sił zbieżnych
n
Układ sił, przyłożonych do ciała
sztywnego, których kierunki działania
przecinają się w jednym punkcie.
Układ takich sił jest w równowadze,
jeżeli wypadkowa sił jest równa zeru
lub mówiąc inaczej, jeżeli wektory sił
tworzą wielobok zamknięty.
W
P
P
P
P
P
P
=
=
∑
1
2
3
4
n
i=1
n
+
+
+
+.......
=
i
0
72
Płaski układ sił zbieżnych
n
Układ sił, przyłożonych do ciała
sztywnego, których kierunki działania
leżą w jednej płaszczyźnie i
przecinają się w jednym punkcie.
Układ takich sił jest w równowadze,
jeżeli wypadkowa sił jest równa zeru
lub mówiąc inaczej, jeżeli wektory sił
tworzą wielobok zamknięty.
W
P
P
P
P
P
P
=
=
∑
1
2
3
4
n
i=1
n
+
+
+
+.......
=
i
0
73
Równania równowagi
układu sił zbieżnych
n
Aby siły zbieżne były w równowadze,
sumy rzutów tych sił na osie układu
współrzędnych muszą być równe zeru.
.
0
;
0
;
0
1
1
1
=
=
=
∑
∑
∑
=
=
=
n
i
iz
n
i
iy
n
i
ix
P
P
P
74
Równania równowagi
płaskiego układu sił zbieżnych
n
Aby siły zbieżne, leżące w jednej
płaszczyźnie, były w równowadze,
sumy rzutów tych sił na osie układu
współrzędnych muszą być równe zeru.
.
0
;
0
1
1
=
=
∑
∑
=
=
n
i
iy
n
i
ix
P
P
75
Warunki równowagi układu
zbieżnego (podsumowanie)
Wypadkowa układu sił musi być równa 0, tj.
zamyka się wielobok sznurowy sił
(graficznie), a sumy rzutów sił układu na
osie układu współrzędnych muszą być
równe zeru (analitycznie).
n
Przestrzenny układ sił
n
Płaski układ sił
0
;
0
;
0
1
1
1
=
=
=
∑
∑
∑
=
=
=
n
i
iz
n
i
iy
n
i
ix
P
P
P
;
0
;
0
1
1
=
=
∑
∑
=
=
n
i
iy
n
i
ix
P
P
76
Równania równowagi ciała
sztywnego (dowolny układ sił)
n
Jeżeli ciało sztywne jest w stanie
równowagi statycznej, to dodatkowo:
∑
∑
∑
=
=
=
×
−
=
×
=
×
=
n
i
n
i
i
i
i
i
n
i
i
i
o
m
m
1
1
1
)
(
r
a
a
r
P
r
M
0
0
o
= ⇒
=
a
M
77
Warunki równowagi
dowolnego układu sił
(1)
n
Płaski układ sił
lub
lub
l
C
B
A
M
M
M
n
i
iC
n
i
iB
n
i
iA
∉
=
=
=
∑
∑
∑
=
=
=
,
,
0
;
0
;
0
1
1
1
1
1
1
0;
0;
0
n
n
n
ix
iA
iB
i
i
i
P
M
M
AB
x
=
=
=
=
=
=
⊥
∑
∑
∑
0
;
0
;
0
1
1
1
=
=
=
∑
∑
∑
=
=
=
n
i
iO
n
i
iy
n
i
ix
M
P
P
78
Warunki równowagi
dowolnego układu sił
(2)
n
Przestrzenny układ sił
0
;
0
;
0
0
;
0
;
0
1
1
1
1
1
1
=
=
=
=
=
=
∑
∑
∑
∑
∑
∑
=
=
=
=
=
=
n
i
iz
n
i
iy
n
i
ix
n
i
iz
n
i
iy
n
i
ix
M
M
M
P
P
P
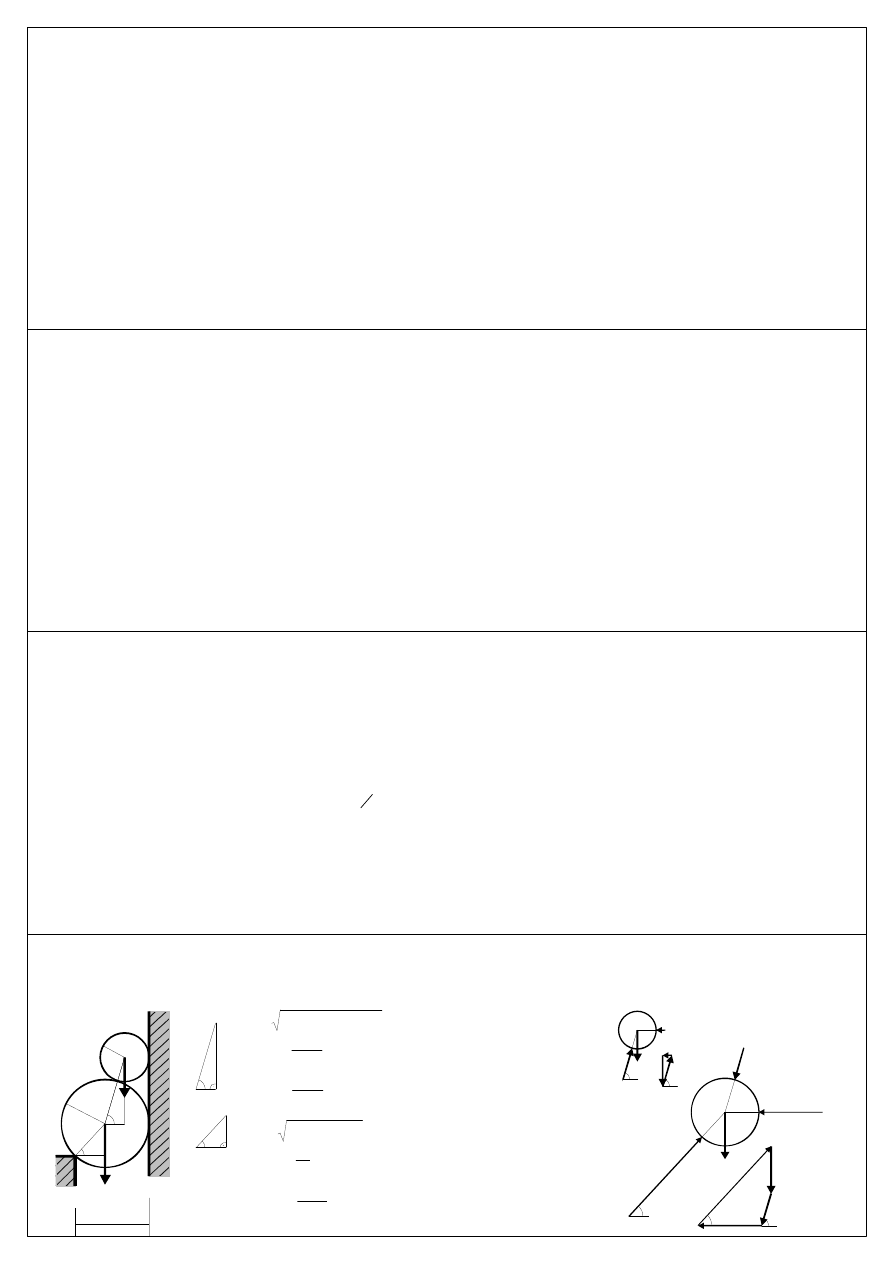
79
Przykład
(dwa układy zbieżne)
(1)
G
A
B
C
Q
r
R
α
β
α
β
d
R
d-R
R
+
r
R-r
y
1
y
2
(
) (
)
2
2
2
r
R
r
R
y
−
−
+
=
r
R
y
+
=
2
sin
β
r
R
r
R
+
−
=
β
cos
(
)
2
2
1
R
d
R
y
−
−
=
R
y
1
sin
=
α
R
r
d
−
=
α
cos
80
Przykład
(dwa układy zbieżne)
(2)
∑
=
−
=
0
cos
C
D
R
R
X
β
∑
=
−
=
0
sin
Q
R
Y
D
β
∑
=
−
−
=
0
cos
cos
β
α
D
B
A
R
R
R
X
∑
=
−
−
=
0
sin
sin
β
α
D
A
R
G
R
Y
Q
Q
R
C
R
D
R
D
R
C
β
β
R
B
G
R
A
R
D
G
R
A
R
D
R
B
α
α
β
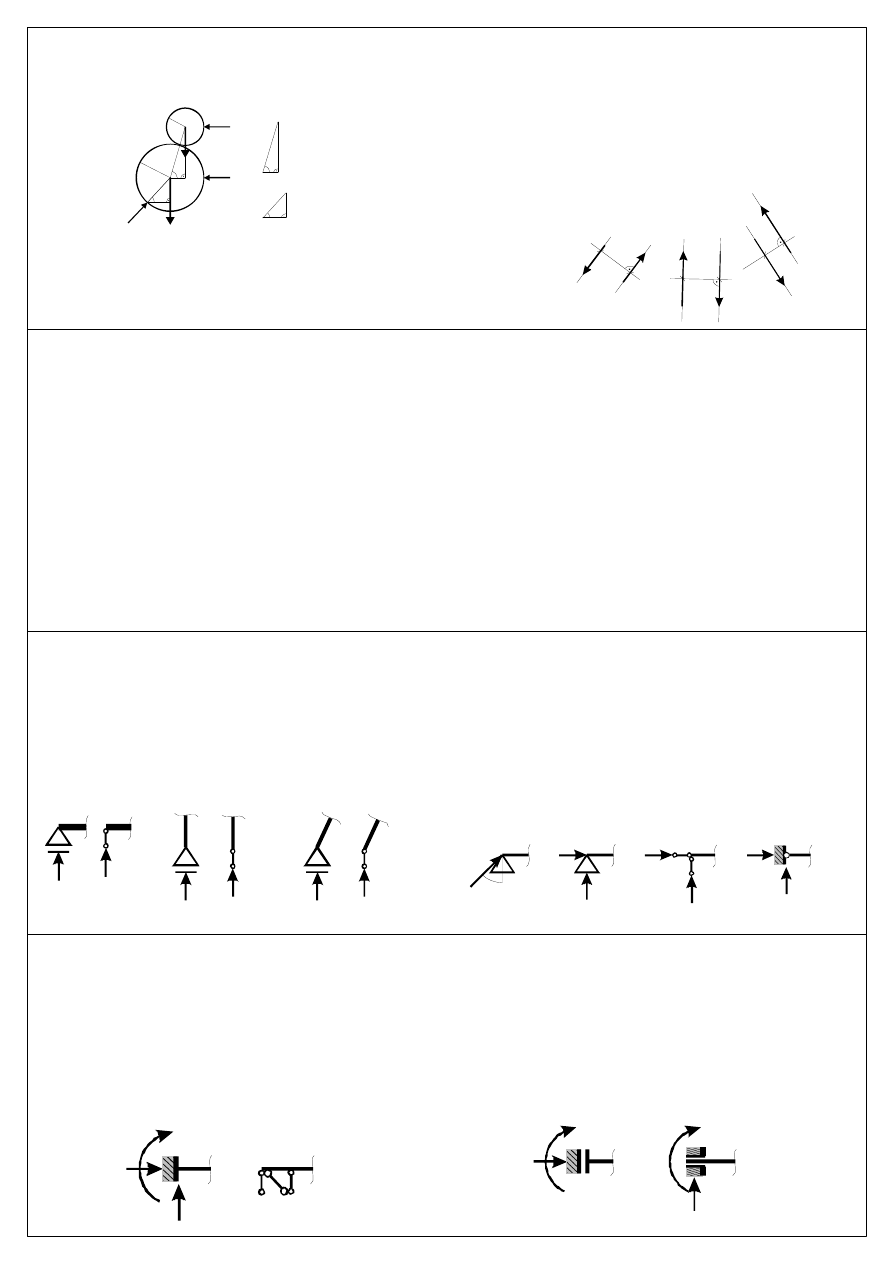
81
Przykład
(układ niezbieżny)
∑
=
−
−
=
0
cos
C
B
A
R
R
R
X
α
∑
=
−
−
=
0
sin
G
Q
R
Y
A
α
(
)
∑
=
−
⋅
−
⋅
=
0
2
1
r
R
Q
y
R
M
C
o
G
A
B
C
Q
r
R
R
A
R
B
R
C
α
β
R
d-R
R
+
r
R-r
y
1
y
2
β
α
O
1
O
2
82
Równowaga par sił
n
Aby układ par sił, działających w
jednej płaszczyźnie na ciało sztywne,
znajdował się w równowadze, suma
wypadkowych momentów tych par sił
musi być równa zero.
0
1
=
∑
=
n
i
i
M
P
1
a
1
P
1
P
2
a
2
P
2
P
3
a
3
P
3
83
Podstawowe typy
ustrojów prętowych
n
Pręt – element o wymiarach poprzecznych
(np. grubość i szerokość) znacznie
mniejszych od trzeciego wymiaru (długość)
n
Belka – ustrój prętowy z prętami
rozmieszczonymi w jednej linii. Siły często
są prostopadłe do osi belki.
n
Rama – ustrój prętowy
n
Krata – ustrój prętowy, który składa się z
prętów połączonych przegubami. Siły mogą
być przykładane tylko w węzłach.
84
Stopnie swobody
n
Liczba niezależnych ruchów, jakie ciało jest w
stanie zrealizować w przestrzeni.
n
Punkt materialny:
– w przestrzeni – 3 (3 składowe przesuwu);
– na płaszczyźnie – 2 (2 składowe przesuwu);
n
Ciało sztywne
– w przestrzeni – 6 (3 składowe przesuwu i 3
składowe obrotu);
– na płaszczyźnie – 3 (2 składowe przesuwu i obrót).
85
Podpory, pręty
podporowe
(1)
n
Podpora przegubowa przesuwna –
zablokowana jedna składowa
przesuwu, jeden pręt podporowy,
jedna reakcja.
R
A
R
A
R
A
R
A
R
A
R
A
86
Podpory, pręty
podporowe
(2)
n
Podpora przegubowa nieprzesuwna –
zablokowane obie składowe przesuwu,
dwa pręty podporowe, dwie
niewiadome: reakcja i kierunek lub
dwie składowe reakcji.
V
A
H
A
V
A
H
A
V
A
H
A
R
A
α
87
Podpory, pręty
podporowe
(3)
n
Sztywne zamocowanie – zablokowane
wszystkie przemieszczenia (dwie
składowe przesuwu i obrót), trzy pręty
podporowe, trzy niewiadome – dwie
składowe siły i moment.
V
A
H
A
M
A
88
Inne sposoby podparcia
n
Sztywne zamocowanie z możliwością
przesuwu:
– poprzecznie do osi pręta;
– wzdłuż pręta.
H
A
M
A
V
A
H
A
M
A
89
Rodzaje obciążeń –
układy płaskie
n
Siły skupione;
n
Momenty skupione;
n
Obciążenia liniowo rozłożone;
n
Obciążenia momentem liniowo
rozłożone.
90
Rodzaje obciążeń –
układy przestrzenne
n
Siły skupione;
n
Momenty skupione;
n
Obciążenia liniowo rozłożone;
n
Obciążenia momentem liniowo
rozłożone;
n
Obciążenia rozłożone na powierzchni;
n
Obciążenia rozłożone w objętości.
91
Jednostki obciążeń
n
Obciążenie ciągłe – kN/m
n
Siła skupiona - kN
n
Moment skupiony - kNm
n
Obciążenie ciągłe momentem –
kNm/m
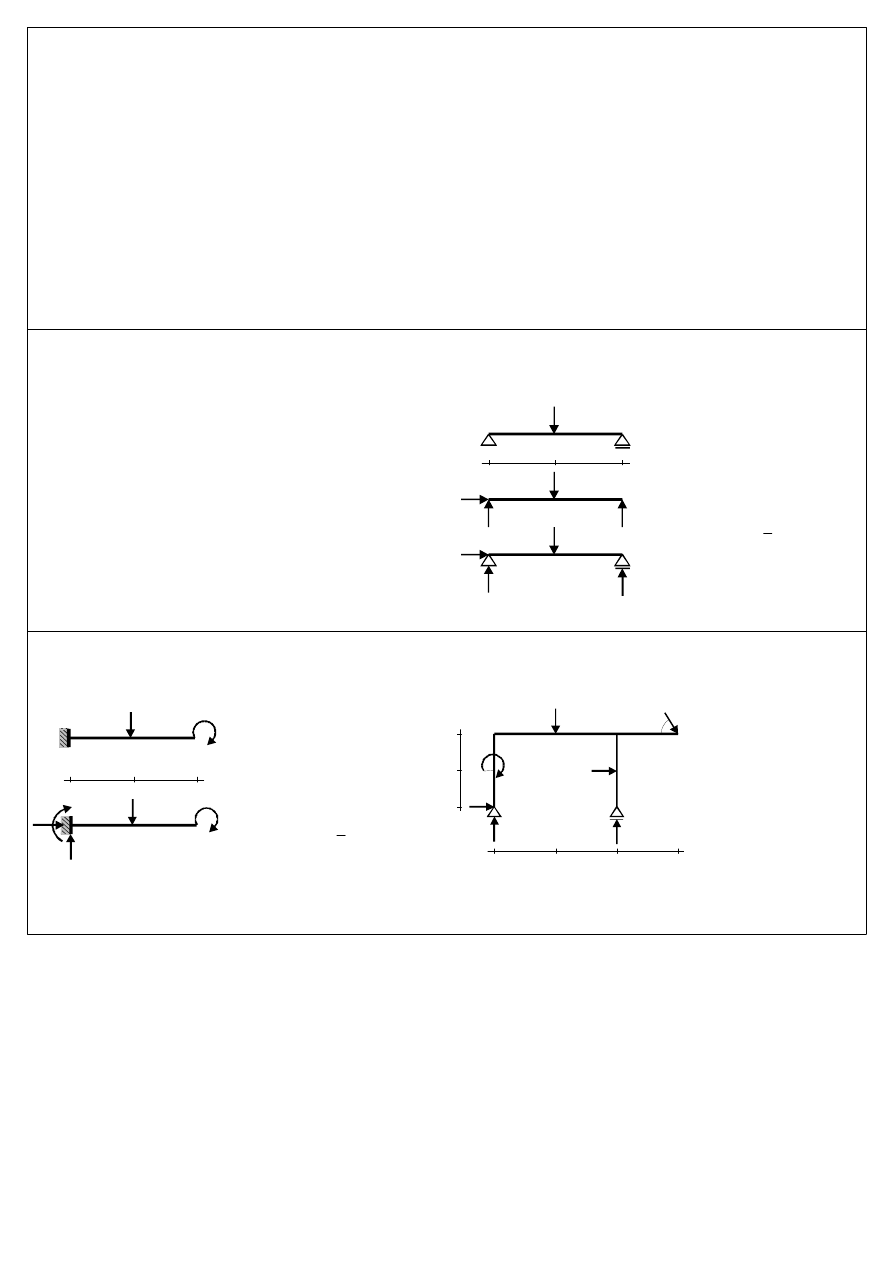
92
Reakcje – belka
swobodnie podparta
l/2
P
l/2
P
V
A
H
A
R
B
P
V
A
H
A
R
B
0
:
=
∑
A
H
X
0
:
=
−
+
∑
P
R
V
Y
B
A
0
2
:
=
⋅
−
⋅
∑
l
P
l
R
M
B
A
93
Reakcje – belka
wspornikowa
P
l/2
l/2
P
M
V
A
H
A
M
A
M
0
:
=
∑
A
H
X
0
:
=
−
∑
P
V
Y
A
0
2
:
=
+
⋅
+
∑
M
l
P
M
M
A
A
94
Reakcje – rama
bezprzegubowa
l
P
l
l
h
h
V
A
H
A
α
R
B
M
P
P
0
cos
:
=
+
+
∑
α
P
P
H
X
A
0
2
3
sin
2
cos
:
=
⋅
−
⋅
+
⋅
+
⋅
+
⋅
+
∑
l
R
l
P
h
P
h
P
l
P
M
M
B
A
α
α
0
sin
:
=
−
−
+
∑
α
P
P
R
V
Y
B
A
Wyszukiwarka
Podobne podstrony:
NI Spis tresci id 318044 Nieznany
poczatki autyzmu) id 73751 Nieznany
poczatki japonskiego id 364652 Nieznany
NI Spis tresci id 318044 Nieznany
grafikia tresci progr id 194904 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
więcej podobnych podstron