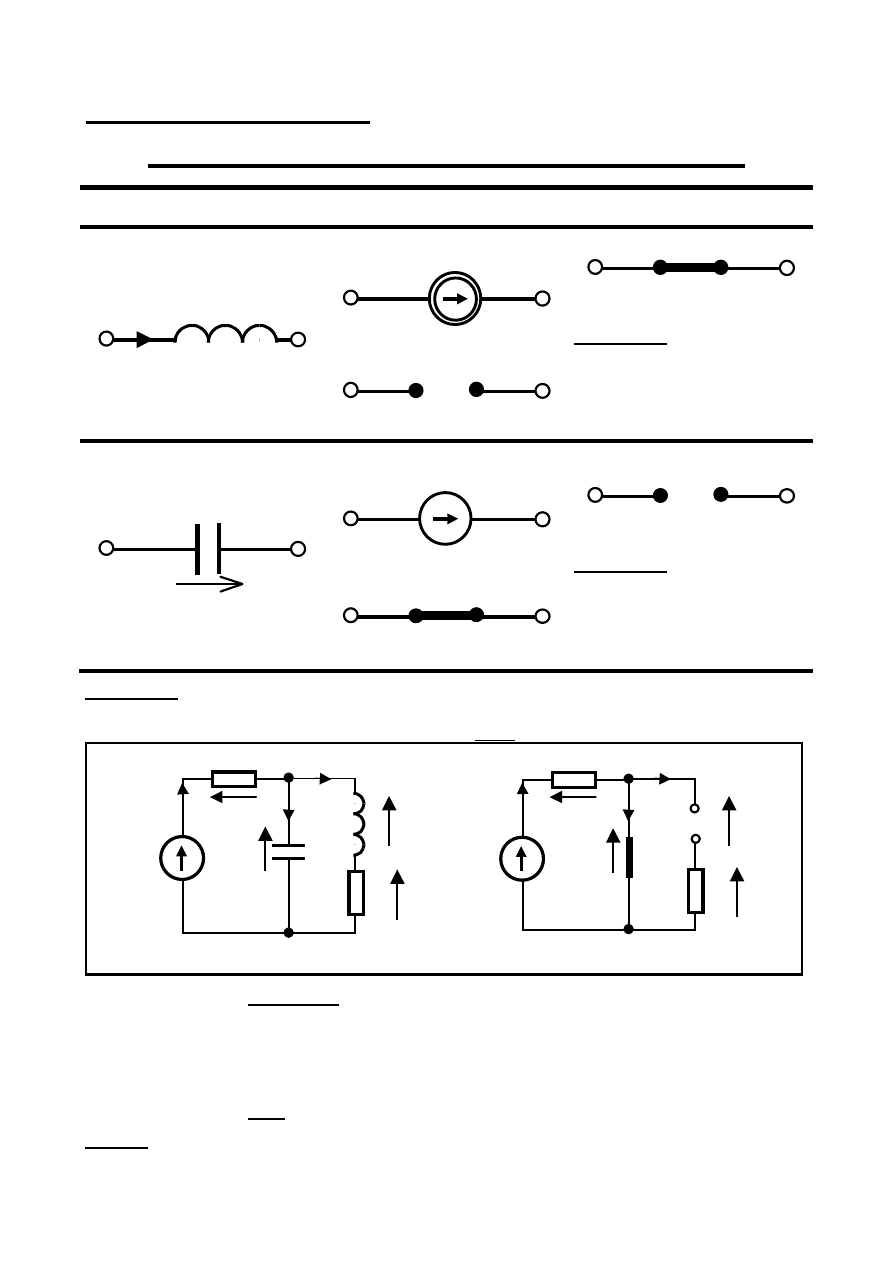
SD ( stany dynamiczne) obwodów
SLS
i
1
(t)
i
2
(t)
……
i
N
(t)
u
1
(t)
u
2
(t)
……
u
N
(t)
W
e1
(t)
W
e2
(t)
……
W
eo
(t)
p
1
(t)
p
2
(t)
……
p
N
(t)
W
L1
(t)
W
L2
(t)
……
W
Ln
(t)
W
M1
(t)
W
M2
(t)
……
W
Mm
(t)
W
C1
(t)
W
C2
(t)
……
W
Cp
(t)
W
R1
(t)
W
R2
(t)
……
W
Rk
(t)
W
j1
(t)
W
j2
(t)
……
W
jr
(t)
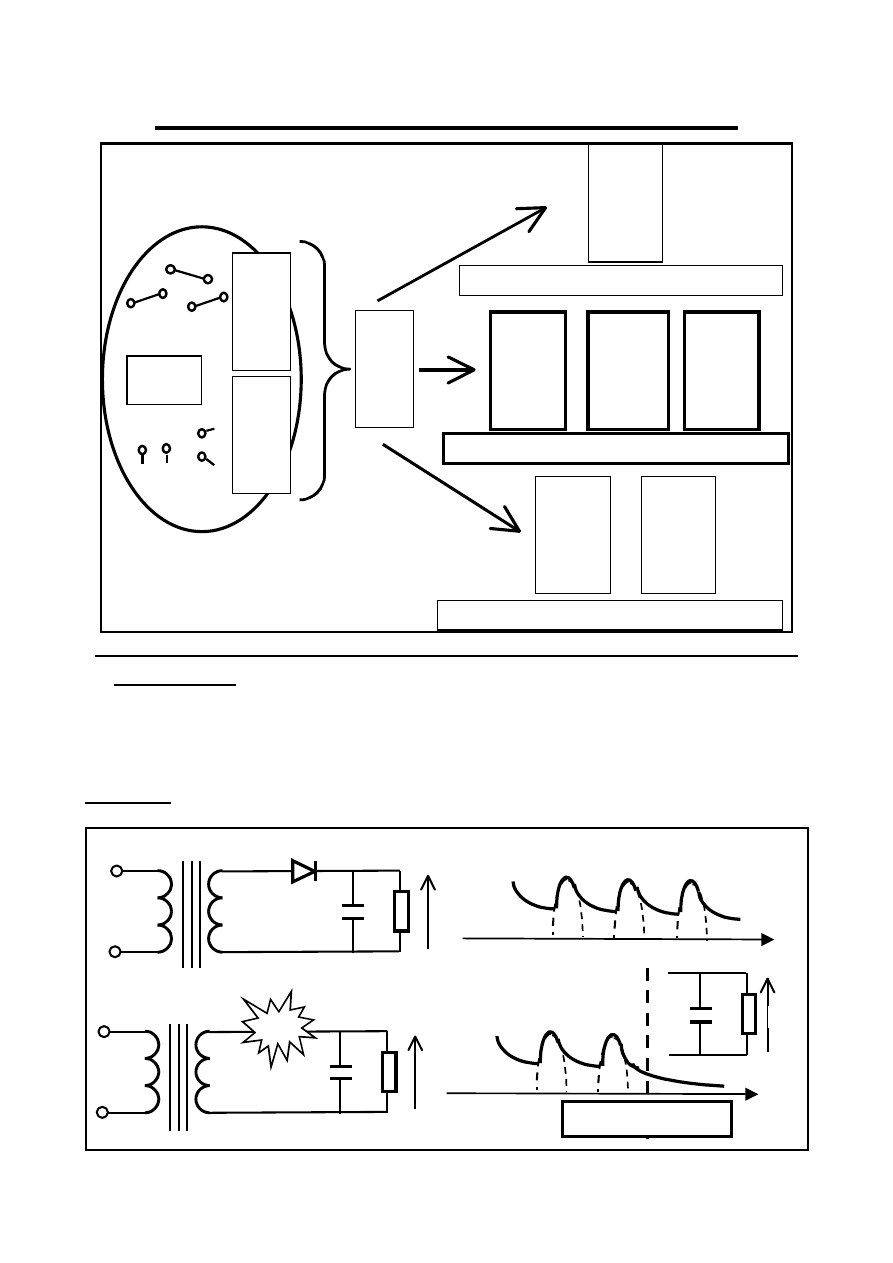
Energia „stracona” w elementach dyssypatywnych
Energia „zgromadzona” w elementach konserwatywnych
Energia „przetworzona” w elementach źródłowych
Stany Dynamiczne w obwodzie SLS związane są z zaistnieniem KOMUTACJI.
Komutacja – jakakolwiek zmiana czegokolwiek w obwodzie !
– Zwarcie lub rozwarcie gałęzi;
– Włączenie ( wyłączenie ) autonomicznego napięciowego ( prądowego ) źródła energii;
– Zmiana parametrów własnych lub wzajemnych gałęzi ;
–
itd.
Przykłady
1). Komutacja typu rozwarcie gałęzi ( uszkodzenie elementu ):
≈
u
o
(t)
≈
u
o
(t)
Chwila komutacji
u
o
(t)
C
R
D
Ts
C
R
C
R
Komutacja !
Ts
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
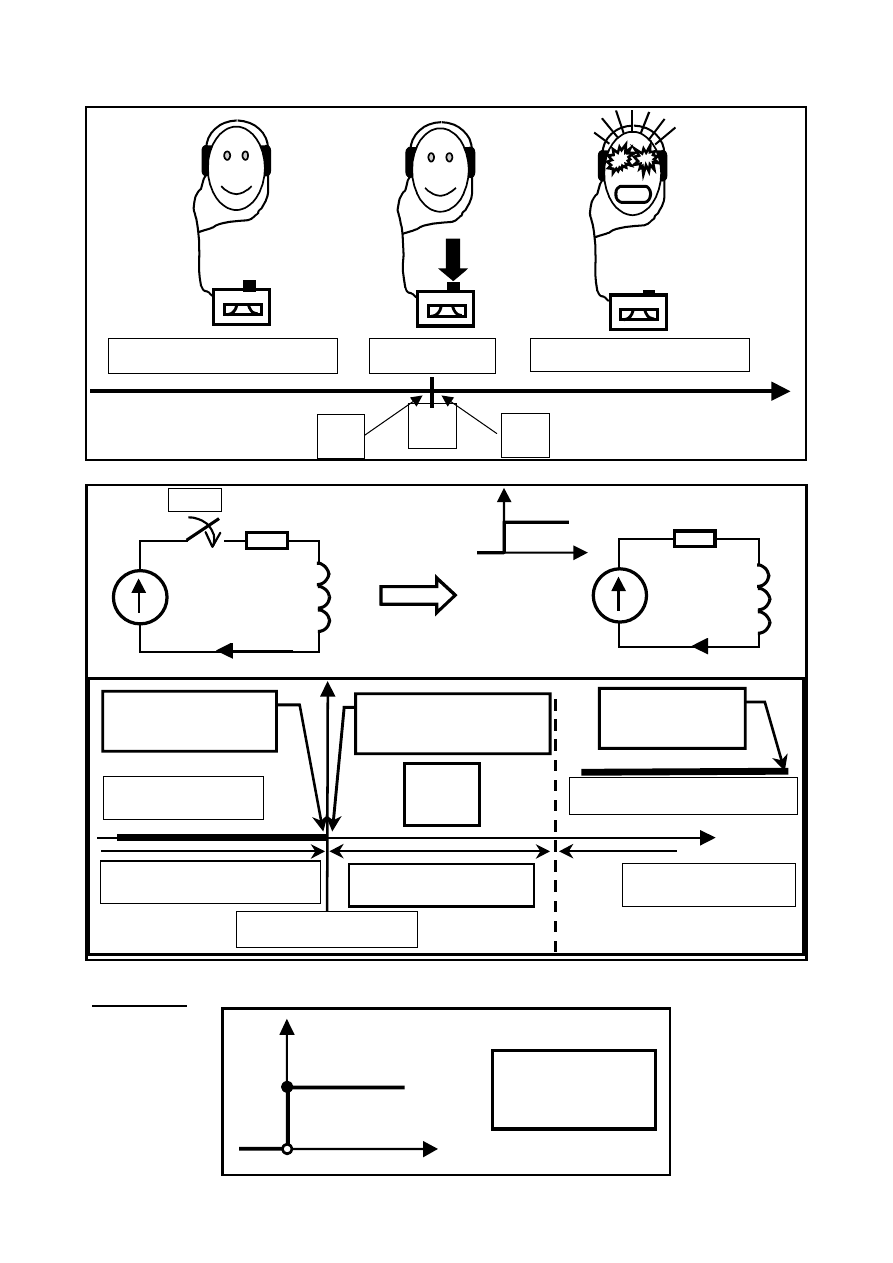
2). Włączenie zasilania ( autonomicznego źródła napięcia ) w obwodzie:
Chwila przed komutacją
Chwila po komutacji !
ON !
Komutacja
t
0–
t
0
t
0+
t
3).
t
0
= 0
R
L
E
i(t)
t < 0, i(t)
≡ 0 A
t
>> 0, i(t) ≡ G
⋅E [A]
?
Stan przed komutacją
Stan ustalony
Stan dynamiczny
Chwila komutacji
t
R
L
e(t)=E⋅1(t)
i(t)
i(0
–
)
– dana początkowa
i(0
+
)
– warunek początkowy
i(∞)
– stan ustalony
e(t)
t
E
Definicja: Funkcja Heaviside’a ( skok jednostkowy, funkcja jednostkowa)
1(t)
t
⎩
⎨
⎧
≥
<
=
0
,
1
0
,
0
)
(
x
x
x
1
1
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
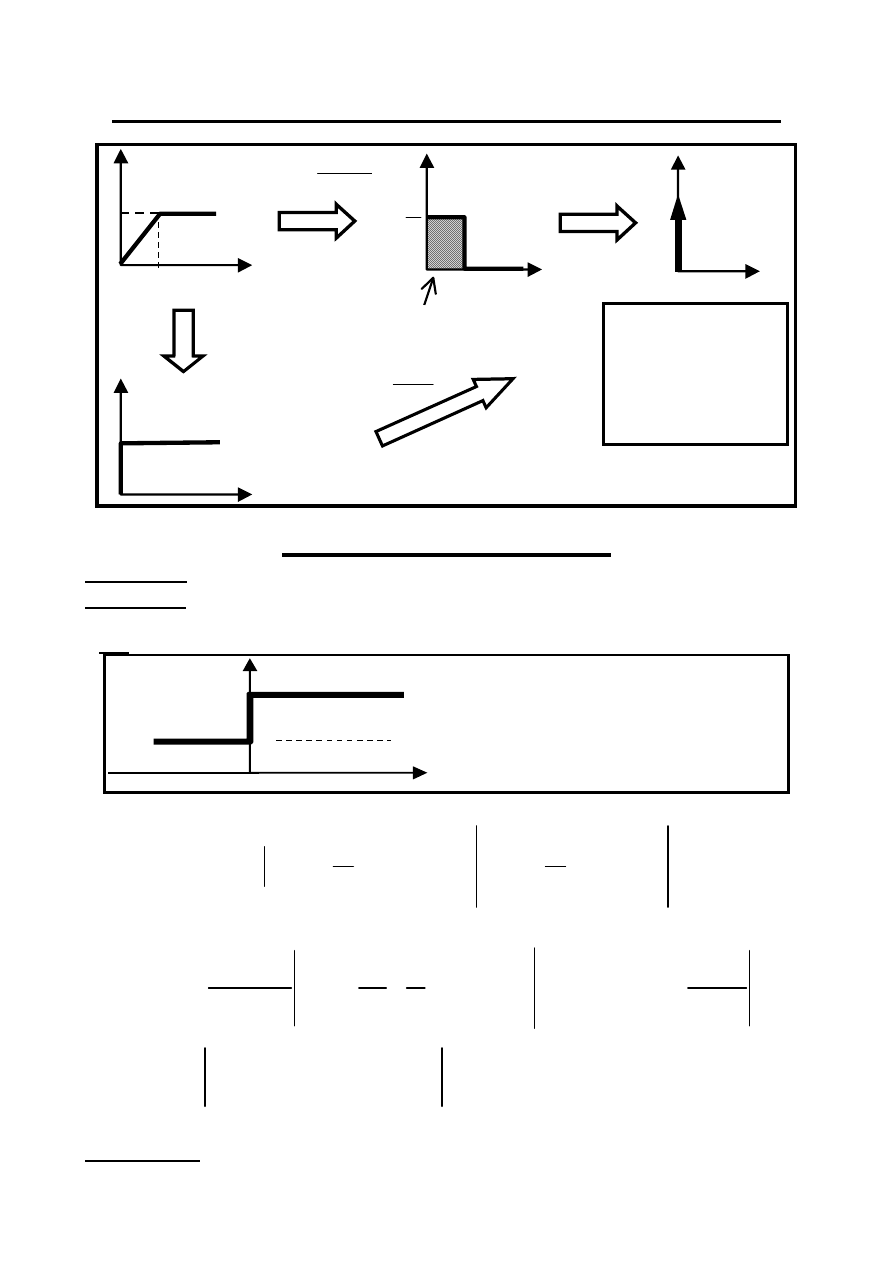
Pseudo Funkcja Impulsowa – Delta Dirac’a
δ(t)
1
ε
t
1(t,
ε)
ε
t
δ(t,ε)
1
ε
t
δ(t)
)
ε
,
δ(
lim
)
δ(
0
ε
t
t
→
=
t
t
t
d
)
ε
,
(
d
)
ε
,
δ(
1
=
1
d
)
δ(
=
∫
+∞
∞
−
t
t
A= 1
⎩
⎨
⎧
=
∞
+
≠
=
0
dla
0
dla
0
)
δ(
t
t
t
)
ε
,
(
1
lim
)
(
1
0
ε
t
t
→
=
t
t
t
d
)
(
d
)
δ(
1
=
1
1(t,
ε)
Prawa Komutacji
Element R – możliwa skokowa zmiana napięcia i prądu;
Element L – musi być zachowana ciągłość prądu (strumienia skojarzonego)
Dowód
( przez negację )
:
Zał. – w chwili komutacji
t
= 0 następuje skokowa zmiana prądu płynącego w elemencie L:
t
I
0–
I
0+
i(t)
t = 0
i(t)|
t=0+
= I
0+
i(t)= I
0–
+ ( I
0+
– I
0–
) ⋅1(t)
Energia zgromadzona w elemencie L w chwili komutacji:
0
2
0
0
)
(
L
2
1
)
(
)
(
ψ
2
1
)
(
=
=
=
⋅
=
⋅
=
t
t
t
L
t
i
t
i
t
t
w
Moc chwilowa przetwarzania energii w elemencie L w chwili komutacji:
0
0
2
0
)
(
)
(
L
)
(
L
2
1
)
(
)
(
=
=
=
∂
∂
⋅
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
⋅
∂
∂
=
∂
∂
=
t
t
t
L
L
t
t
i
t
i
t
i
t
t
t
w
t
p
?
!
!
)
(
δ
A
)
(
0
0
∞
+
→
⋅
=
=
=
t
t
L
t
t
p
qed.
Element C – musi być zachowana ciągłość napięcia ( ładunku ).
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
Prawa komutacji dla niezdegenerowanych obwodów SLS
i
L
(0
–
)
≡ i
L
(0
+
)
u
C
(0
–
)
≡ u
C
(0
+
)
Jeśli znamy wartości prądów i napięć bezpośrednio przed komutacją,
to znamy je także bezpośrednio po komutacji.
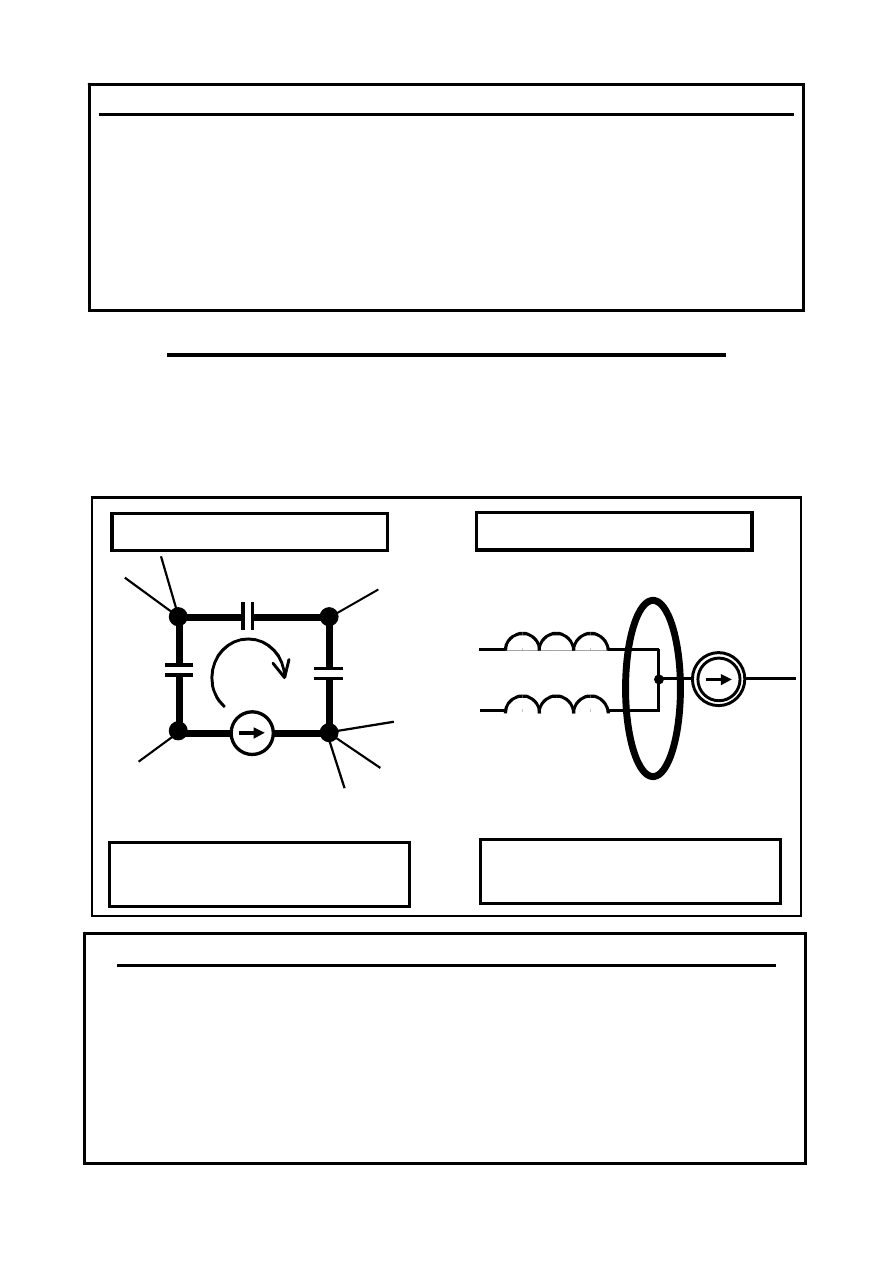
Degeneracje w obwodach SLS
są to obwody w których występują:
–
Oczka pojemnościowe ( OC );
–
Pęki indukcyjne ( PL )
i mogące generować odpowiedzi zawierające delty Dirac’a.
C
1
C
2
C
3
e
!
NPK (!): u
C1
+ u
C2
+ u
C3
+ e = 0
Oczko Pojemnościowe
L
1
L
2
j
Pęk Indukcyjny
!
PPK (!): i
L1
+ i
L2
+ j = 0
W OC elementy: C, e
– są zależne ( NPK ) !
W PL elementy: L, j
– są zależne ( PPK )!
Prawa komutacji dla zdegenerowanych obwodów SLS
i
L
(0
–
)
→ i
L
(0
+
)
u
C
(0
–
)
→ u
C
(0
+
)
Jeśli znamy wartości prądów i napięć bezpośrednio przed komutacją,
to musimy wyliczyć ich wartości bezpośrednio po komutacji.
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
Rząd obwodu SLS: r = ( n
C
– n
OC
) + ( n
L
– n
PL
)
Modele elementów konserwatywnych
T
→0
–
T
→0
+
t
→ + ∞
L
i(0
–
)
A
B
J = i(0+) ≠ 0
A
B
A
B
J = i(0+) = 0
A
B
U = 0
UWAGA !!!
Jeśli wszystkie wymuszenia są
postaci:
w(t)= A
⋅1(t) i w
obwodzie nie powstaną drgania
samowzbudne.
C
u(0
–
)
A
B
A
B
U = u(0+) ≠ 0
A
B
U = u(0+) = 0
A
B
J = 0
UWAGA !!!
Jeśli wszystkie wymuszenia są
postaci:
w(t)= A
⋅1(t) i w
obwodzie nie powstaną drgania
samowzbudne.
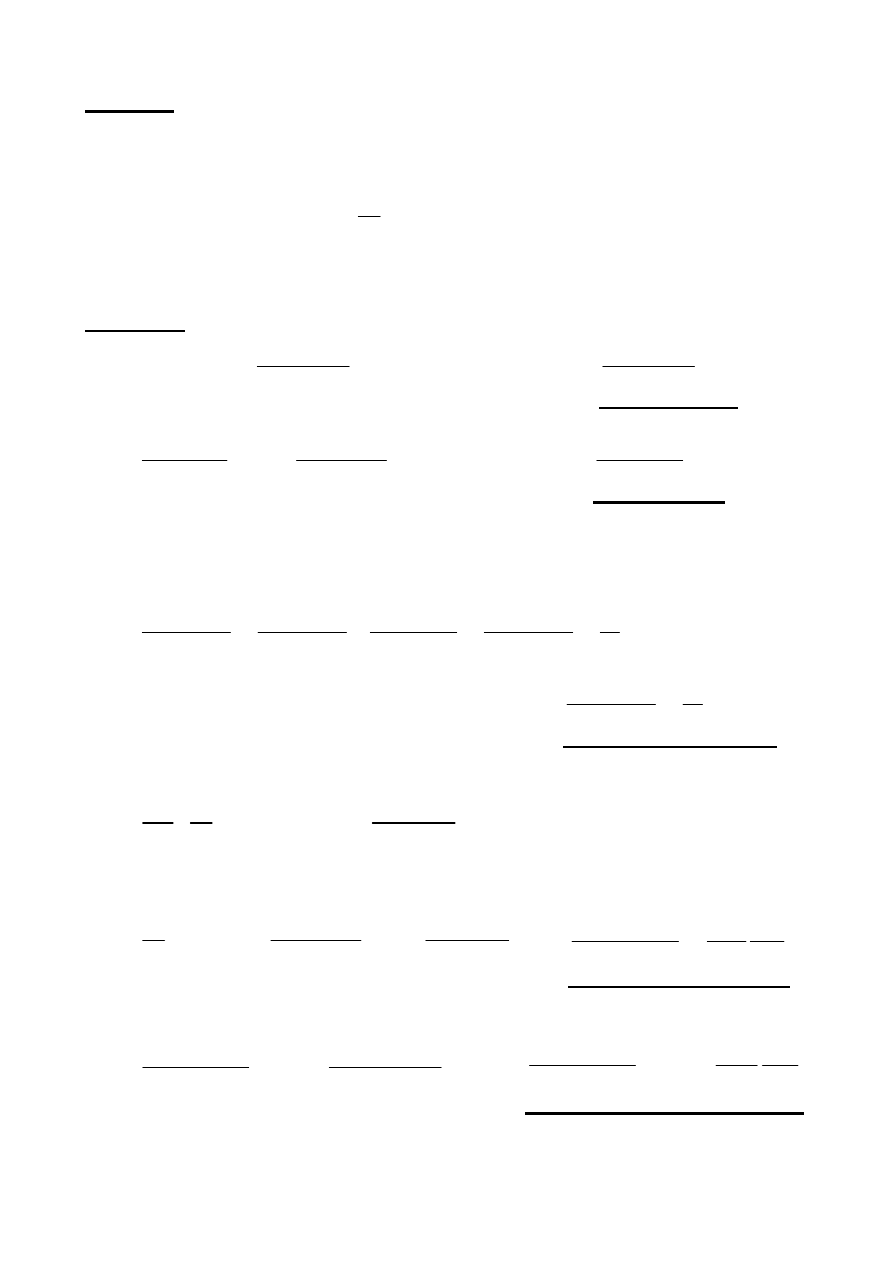
Przykład
W pokazanym na rysunku obwodzie SLS nie jest zgromadzona energia. W
chwili
t = 0 zostaje włączone autonomiczne źródło napięcia stałego. Wyznaczyć wartości
początkowe prądów i napięć oraz ich pochodnych. Dane: E, R
1
, R
2
, L, C.
e(t)=E1(t)
R
1
R
2
L
C
E
R
1
R
2
L
C
i(t)
i
C
(t)
u
C
(t)
i
RL
(t)
u
L
(t)
u
2
(t)
u
1
(t)
i(0
+
)
i
C
(0
+
)
u
C
(0
+
)
i
RL
(0
+
)
u
L
(0
+
)
u
2
(0
+
)
u
1
(0
+
)
Chwila: t = 0
–
Chwila: t = 0
+
Bezpośrednio PRZED komutacją ( włączeniem źródła e(t) ):
e(0
–
)= 0 [V];
i(0
–
)= i
C
(0
–
)= i
RL
(0
–
)= 0 [A];
u
1
(0
–
)= u
C
(0
–
)= u
R
(0
–
)= u
L
(0
–
)= 0 [V];
Bezpośrednio PO komutacji ( włączeniu źródła e(t) ):
Prądy: i(0
+
)= i
C
(0
+
)= G
1
⋅E
i
RL
(0
+
)= 0
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
Napięcia:
u
1
(0
+
)= R
1
⋅
i(0
+
)= R
1
⋅
G
1
⋅E = E
u
2
(0
+
)= R
2
⋅
i
RL
(0
+
)= R
2
⋅
0= 0
0
)
0
(
)
(
C
1
)
0
(
0
0
=
+
=
∫
+
→
−
+
t
C
C
C
u
dt
t
i
u
u
L
(0
+
)= u
C
(0
+
) – u
2
(0
+
)= 0
Pochodne:
0
d
)
0
(
d
L
)
0
(
RL
L
=
=
+
+
t
i
u
→
0
d
)
0
(
d
RL
=
+
t
i
0
0
R
d
)
0
(
d
R
d
)
0
(
d
2
RL
2
2
=
⋅
=
⋅
=
+
+
t
i
t
u
→
0
d
)
0
(
d
2
=
+
t
u
u
L
(0
+
) = u
C
(0
+
) – u
2
(0
+
)
)
0
(
C
1
d
)
0
(
d
d
)
0
(
d
d
)
0
(
d
d
)
0
(
d
C
C
2
C
L
+
+
+
+
+
=
=
−
=
i
t
u
t
u
t
u
t
u
→
E
G
t
u
⋅
⋅
=
+
1
L
C
1
d
)
0
(
d
⎥
⎦
⎤
⎢
⎣
⎡
+
=
∂
∂
∫
t
t
i
t
t
i
d
i
t
0
RL
2
RL
C
)
(
R
d
)
(
d
L
)
(
C
1
τ
τ
t
t
i
t
t
i
t
i
d
)
(
d
R
d
)
(
d
L
)
(
C
1
RL
2
2
RL
2
C
+
=
→
1
2
RL
2
R
E
LC
1
d
)
0
(
d
=
+
t
i
t
i
t
u
2
RL
2
2
2
2
2
d
)
0
(
d
R
d
)
0
(
d
+
+
⋅
=
→
1
2
2
2
2
R
E
LC
1
R
d
)
0
(
d
⋅
=
+
t
u
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
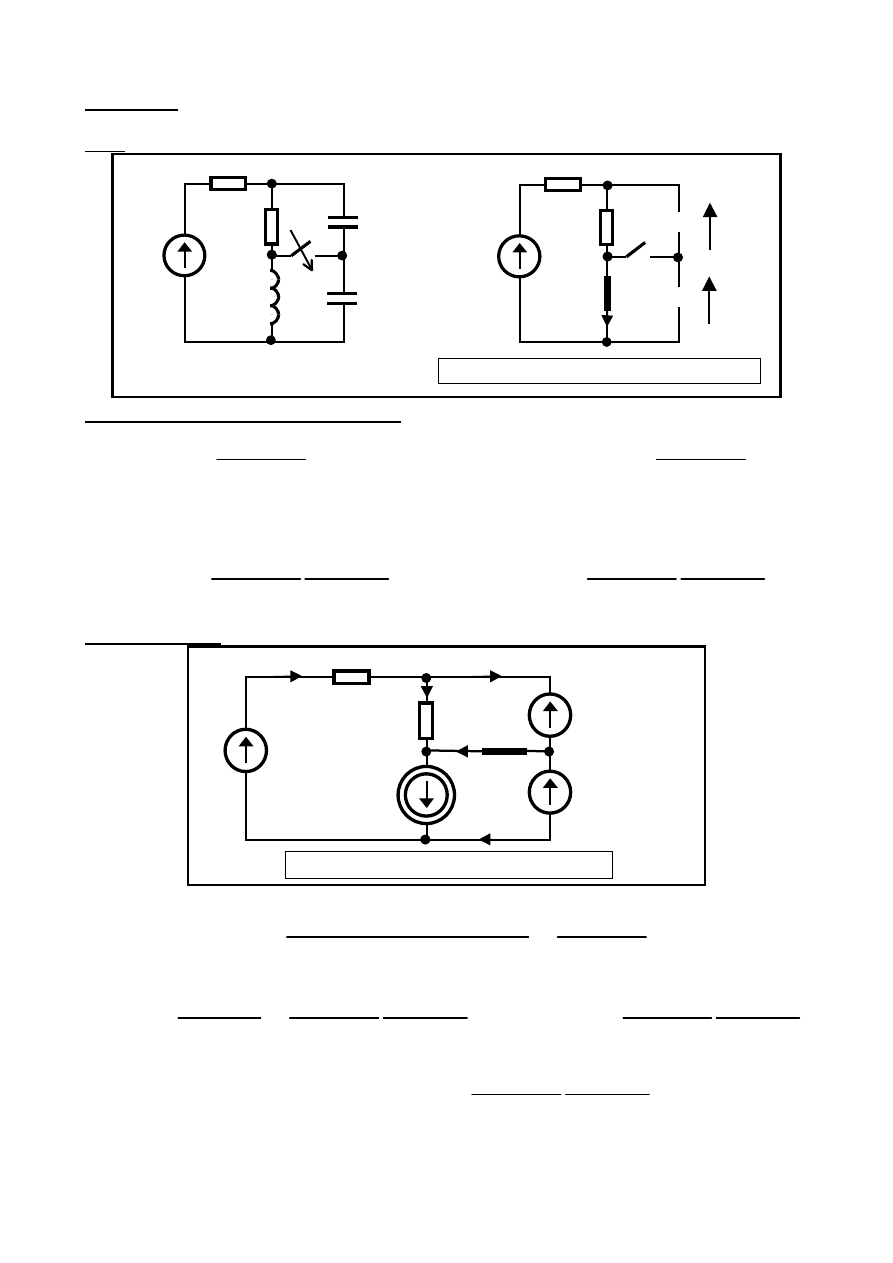
Przykład
Obwód SLS pokazany na rysunku znajduje się w stanie ustalonym. W chwili t=
0 zamknięto wyłącznik W. Wyznaczyć wartości początkowe prądów.
Dane:
u
(
t
)= E 1(
t
), R
1
, R
2
, L, C
1
, C
2
.
R
2
C
1
C
2
L
R
1
W
E
⋅1(t)
t=0
R
2
C
1
L
R
1
W
E
C
2
Stan ustalony – przed komutacją
i
L
u
C1
u
C2
Stan ustalony – przed komutacją:
2
1
L
R
R
E
)
0
(
+
=
−
i
;
E
R
R
R
)
0
(
)
0
(
2
1
1
C
C
2
1
+
=
+
−
−
u
u
Ładunki w kondensatorach połączonych szeregowo:
)
0
(
C
)
0
(
C
2
1
C
2
C
1
−
−
⋅
=
⋅
u
u
E
C
C
C
R
R
R
)
0
(
2
1
2
2
1
1
C
1
+
+
=
−
u
,
E
C
C
C
R
R
R
)
0
(
2
1
1
2
1
1
C
2
+
+
=
−
u
Po komutacji:
R
2
R
1
W
E
Bezpośrednio po komutacji
u
C1
(0
+
) = u
C1
(0
–
)
u
C2
(0
+
) = u
C2
(0
–
)
i
L
(0
+
) = i
L
(0
–
)
i
2
(0
+
)
i
C1
(0
+
)
i
C2
(0
+
)
i
W
(0
+
)
i
1
(0
+
)
(
)
2
1
2
C
C
2
R
R
E
R
)
0
(
)
0
(
E
)
0
(
2
1
+
=
+
−
=
+
+
+
u
u
i
;
2
1
2
2
1
1
C
1
C
C
C
R
R
E
R
)
0
(
)
0
(
1
+
+
=
=
+
+
u
i
;
2
1
1
2
1
C
C
C
C
R
R
E
)
0
(
1
+
+
=
+
i
2
1
1
2
1
1
L
W
C
C
C
R
R
E
)
0
(
)
0
(
)
0
(
+
+
=
−
=
+
+
+
i
i
i
;
0
)
0
(
)
0
(
)
0
(
L
2
C
1
=
−
=
+
+
+
i
i
i
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
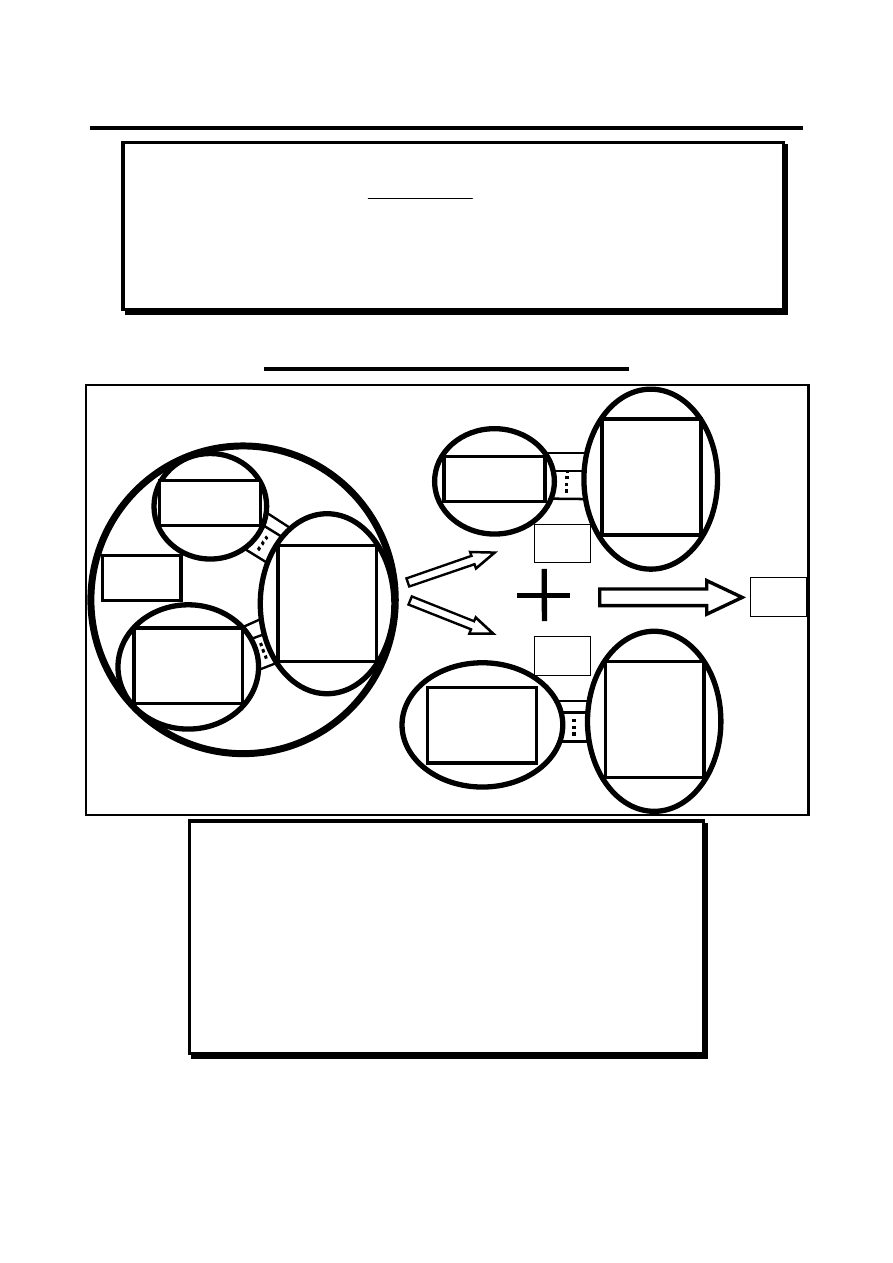
Liniowe Równanie Różniczkowe ( LRR )
( )
[
]
tkowe
począ
warunki
-
)
1
(
1
0
dla
),
0
(
;
)
(
)
(
)
(
1
0
)
(
−
=
⋅
=
⎥
⎦
⎤
⎢
⎣
⎡
⋅
∑
∑
=
=
r
,
,
,
k
f
t
w
b
dt
t
df
a
k
m
n
n
n
r
k
k
k
k
K
Rozwiązanie ogólne
Źródła
autonomiczne
Pseudo źródła
związane z
warunkami
początkowymi
R, C,
L (M),
ZS
Źródła
autonomiczne
R, C,
L (M),
ZS
Pseudo źródła
związane z
warunkami
początkowymi
R, C,
L (M),
ZS
SLS
f
w
(t)
f
p
(t)
f(t)
)
,
0
dla
)
(
)
(
)
(
0
m
p
+∞
∈<
+
=
+
=
∑
t
t
f
t
f
t
f
n
m
W
f
p
(t)
– składowa przejściowa odpowiedzi ( RRJ );
f
W
•
(t) –
składowa wymuszona odpowiedzi ( RRN );
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
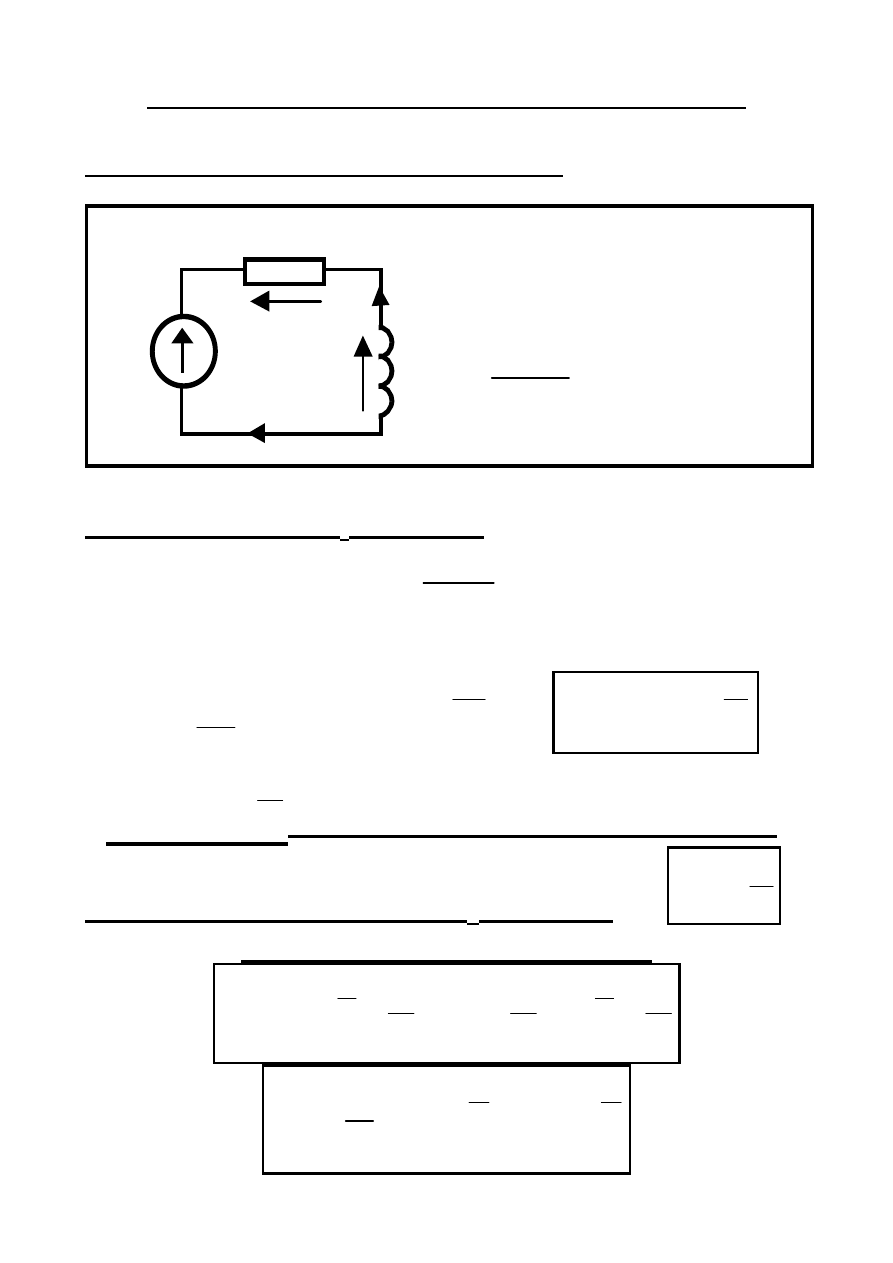
Stany dynamiczne (nieustalone, przejściowe) w obwodach SLS
Obwód RL (o
bwód rzędu pierwszego )
R
L
e(t)
u
R
u
L
i
u
L
(t) + u
R
(t) = e(t)
)
(
)
(
R
t
d
)
(
d
L
t
e
t
i
t
i
=
⋅
+
I
0
1). e(t) = E
⋅1(t); I
0
≠ 0
( przed komutacją w elemencie L jest energia ).
Składowa przejściowa i
p
(t) prądu i(t):
0
)
(
R
t
d
)
(
d
L
p
p
=
⋅
+
t
i
t
i
RRJ:
Równanie charakterystyczne:
L
⋅s + R = 0
GL
1
−
=
s
→
GL
e
e
t
t
s
−
⋅
=
→
GL
e
)
(
p
t
A
t
i
−
=
[ ]
R
L
GL
s
T
=
=
– stała czasowa obwodu RL.
Składowa wymuszona ( ustalona ) i
w
(t) prądu i(t):
R
E
)
(
w
=
t
i
Pełna odpowiedź obwodu RL
R
E
e
R
E
I
R
E
e
)
(
GL
GL
0
+
⋅
⎟
⎠
⎞
⎜
⎝
⎛ −
=
+
=
−
−
t
t
A
t
i
( )
GL
GL
e
I
e
1
R
E
)
(
0
t
t
t
i
−
−
⋅
+
−
⋅
=
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
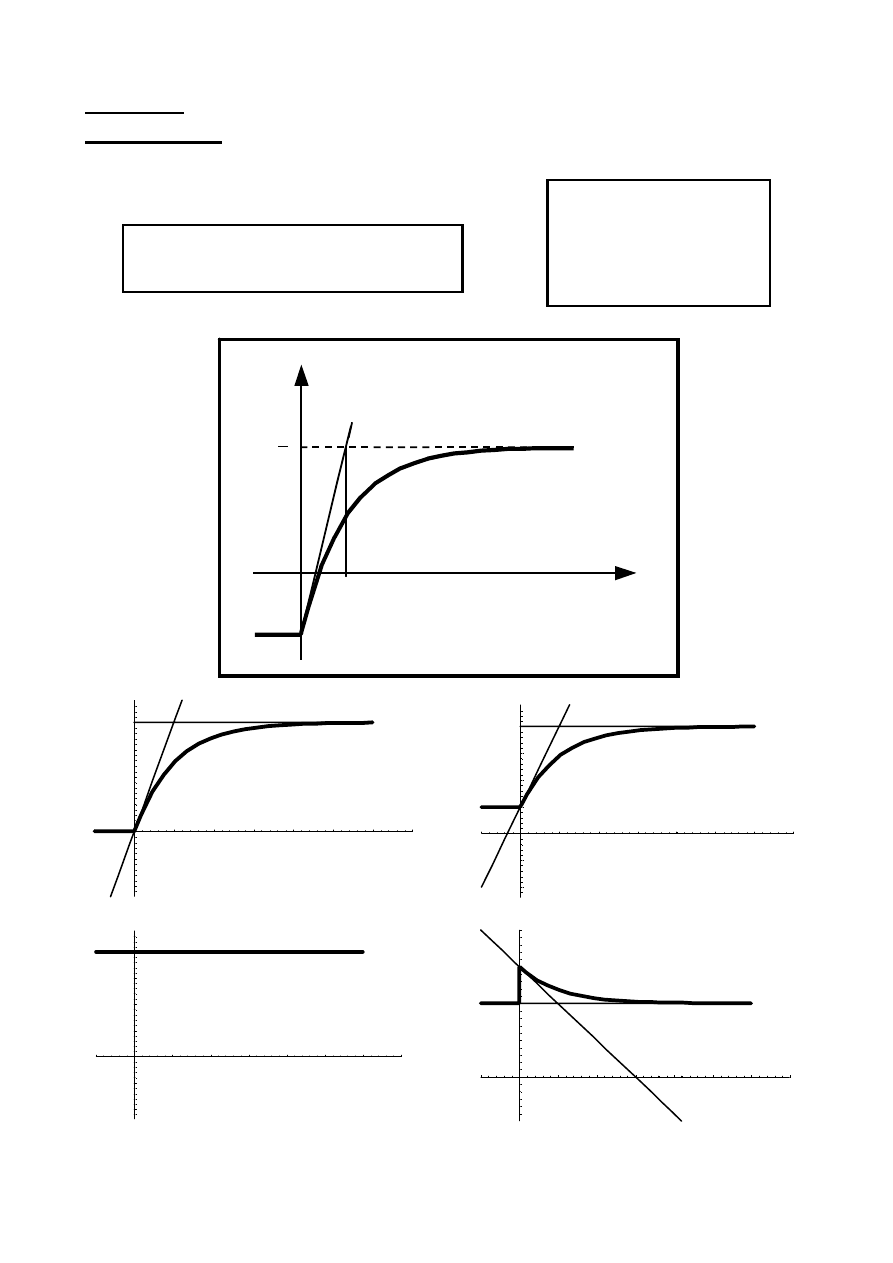
Przykład E= 10 V, R= 1
Ω, L= 1 H, I
0
= –5 A
Rozwiązanie:
T = GL = 1 s; E/R = 10 A
[A]
0
1
e
15
)
(
+
⋅
−
=
−t
t
i
→
[A]
10
)
(
[A]
5
)
0
(
+
=
∞
−
=
i
i
T
I
0
E
R
t
i(t)
-1
1
2
3
4
5
6
7
-5
-2.5
2.5
5
7.5
10
-1
1
2
3
4
5
6
7
-5
-2.5
2.5
5
7.5
10
-1
1
2
3
4
5
6
7
-5
5
10
15
20
-1
1
2
3
4
5
6
7
-5
-2.5
2.5
5
7.5
10
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
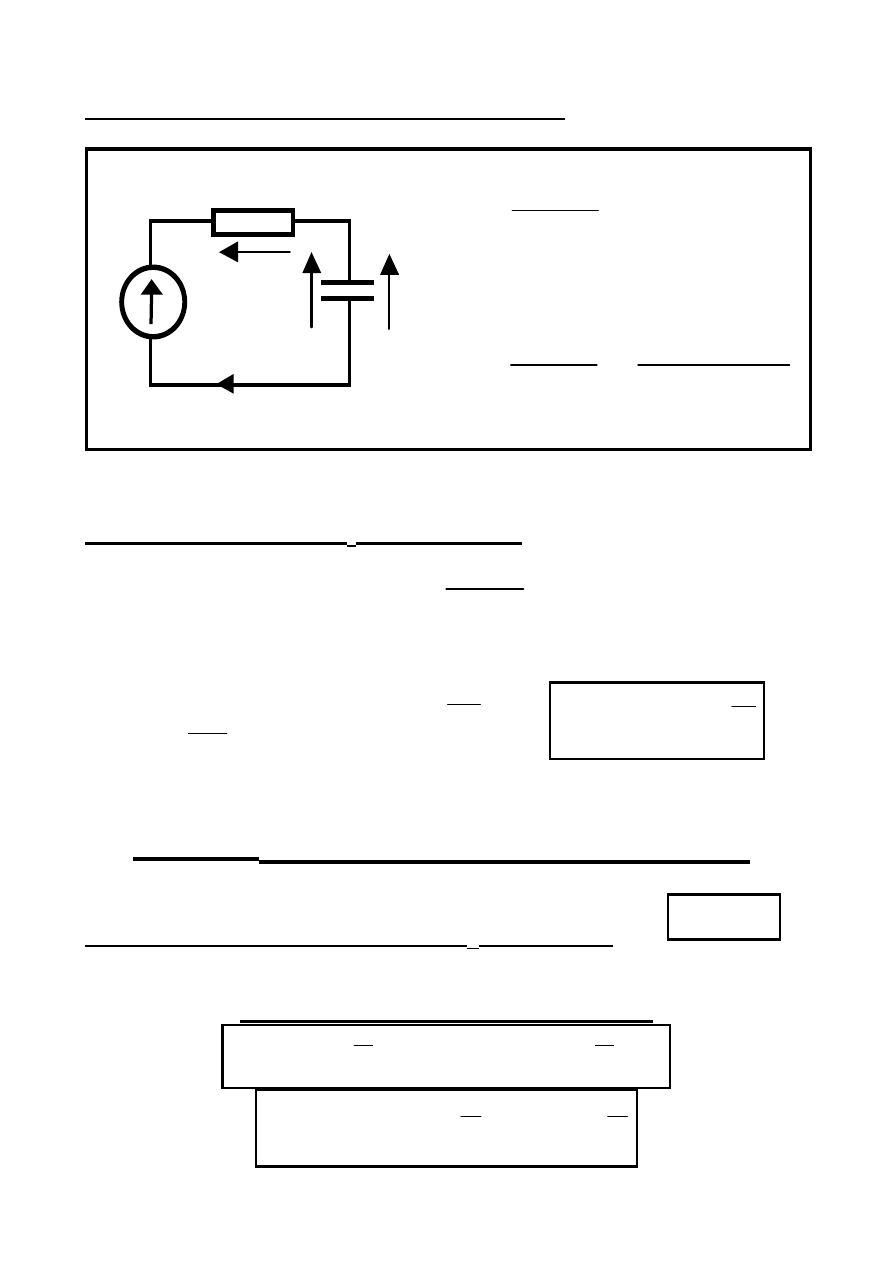
Obwód RC (o
bwód rzędu pierwszego )
R
C
e(t)
u
R
u
i
R
t
u
t
e
t
u
)
(
)
(
t
d
)
(
d
C
−
=
U
0
)
(
t
d
)
(
d
C
t
i
t
u
=
1). e(t) = E
⋅1(t); U
0
≠ 0
( przed komutacją w elemencie C jest energia
).
Składowa przejściowa u
p
(t) napięcia u(t):
0
)
(
t
d
)
(
d
RC
p
p
=
+
t
u
t
u
RRJ:
Równanie charakterystyczne:
RC
⋅s + 1 = 0
RC
1
−
=
s
→
RC
e
e
t
t
s
−
⋅
=
→
RC
e
)
(
p
t
A
t
u
−
=
[ ]
RC
s
T
=
– stała czasowa obwodu RC.
Składowa wymuszona ( ustalona ) i
w
(t) prądu i(t):
E
)
(
w
=
t
u
Pełna odpowiedź obwodu RC
(
)
E
e
E
U
E
e
)
(
GL
RC
0
+
⋅
−
=
+
=
−
−
t
t
A
t
u
( )
GL
RC
e
U
e
1
E
)
(
0
t
t
t
u
−
−
⋅
+
−
⋅
=
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
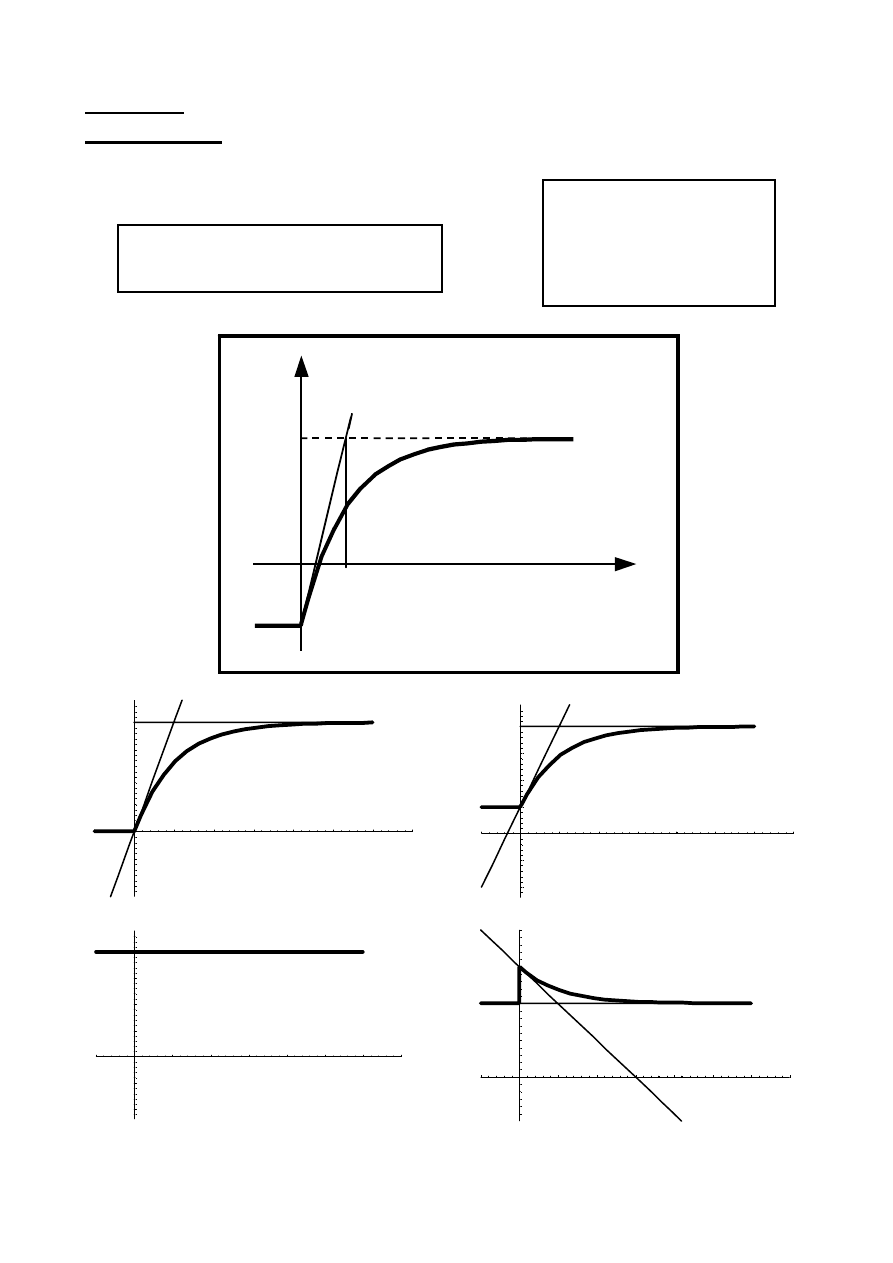
Przykład E= 10 V, R= 1
Ω, C= 1 F, U
0
= –5 V
Rozwiązanie:
T = RC = 1 s; E = 10 V
[V]
e
15
0
1
)
(
t
t
u
−
⋅
−
=
→
[V]
10
)
(
[V]
5
)
0
(
+
=
∞
−
=
u
u
T
U
0
E
t
u(t)
-1
1
2
3
4
5
6
7
-5
-2.5
2.5
5
7.5
10
-1
1
2
3
4
5
6
7
-5
-2.5
2.5
5
7.5
10
-1
1
2
3
4
5
6
7
-5
5
10
15
20
-1
1
2
3
4
5
6
7
-5
-2.5
2.5
5
7.5
10
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
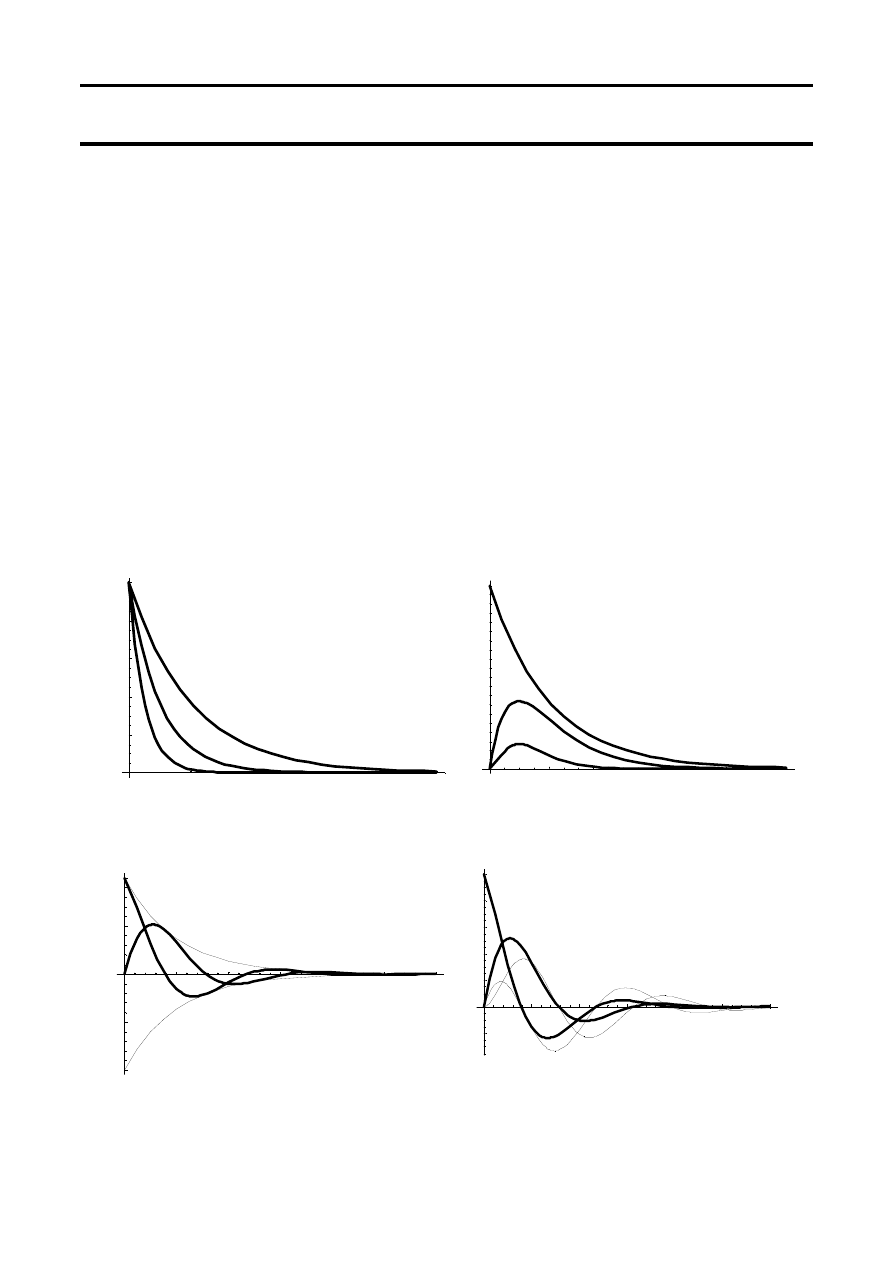
Pierwiastki równania
charakterystycznego
Funkcje należące do układu
podstawowego rozwiązań
s= –
α
,
α∈
ℜ
e
–
αt
s
k
= –
α
, k=1,2,…m,
α∈
ℜ
e
–
αt
, te
–
αt
, t
2
e
–
αt
, …, t
(m-1)
e
–
αt
s= –
α
±
j
ω
,
α∈
ℜ
,
ω∈
ℜ
+
e
–
αt
cos
ω
t, e
–
αt
sin
ω
t
s
k
= –
α
k
±
j
ω
k
, k=1,2,…,m,
α
k
∈
ℜ
,
ω
k
∈
ℜ
+
e
–
αt
cos
ω
t, te
–
αt
cos
ω
t,…, t
(m-1)
e
–
αt
cos
ω
t,
e
–
αt
sin
ω
t, te
–
αt
sin
ω
t,…, t
(m-1)
e
–
αt
sin
ω
t,
2
4
6
8
10
0.2
0.4
0.6
0.8
1
e
- a
t
2
4
6
8
10
0.2
0.4
0.6
0.8
1
e
- a
t
,
te
- a
t
,
t
2
e
- a
t
1
2
3
4
5
6
-0.2
0.2
0.4
0.6
0.8
1
ă
-
a t
Cos
@
w
t
D
,
ă
-
a t
Sin
@
w
t
D
,t
ă
-
a t
Cos
@
w
t
D
,t
ă
-
a t
Sin
@
D
w
t
1
2
3
4
5
6
-1
-0.5
0.5
1
ă
-
a t
Cos
@
w t
D
,
ă
-
a t
Sin
@
w t
D
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
Wyszukiwarka
Podobne podstrony:
8 Stany nieustalone w obwodach Nieznany
Cw2 Stany nieustalone RC RLC id Nieznany
08 Stany nieustalone w obwodach RLCid 7512 ppt
312[01] 01 122 Arkusz egzaminac Nieznany (2)
01 Przygotowanie produkcji piek Nieznany (2)
22 01 2011 TEST B PSYCHOLOGIA S Nieznany
SPRAWKO STANY NIEUSTALONE, Elektrotechnika, Elektrotechnika
stany nieustalone w RC, Elektrotechnika-materiały do szkoły, Elektrotechnika
01 Thermoregulation, Fever PLid Nieznany (2)
01 Konspekt STRESid 2838 Nieznany (2)
22 01 2011 TEST B PSYCHOLOGIA S Nieznany (2)
01 wstepny elektrycznyid 3080 Nieznany
01, PR, arkuszid 2747 Nieznany (2)
01 roztwory buforoweid 2924 Nieznany
01 Stosowanie zasad bezpieczens Nieznany (2)
2014 Matura 01 03 2014id 28469 Nieznany (2)
03 stany nieustalone
więcej podobnych podstron