INSTYTUT AUTOMATYKI i ROBOTYKI
WYDZIAŁ MECHATRONIKI
PODSTAWY AUTOMATYKI
- laboratorium
Ćwiczenie PA7a
„
Identyfikacja obiektu układu regulacji poziomu
cieczy w zbiorniku otwartym
”
Instrukcja laboratoryjna
Opracowanie : dr
inż. Danuta Holejko
dr inż. Jakub Możaryn
mgr inż. Kacper Malinowski
Warszawa 2011

Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
2
Identyfikacja obiektu układu regulacji poziomu cieczy w zbiorniku
otwartym
Celem ćwiczenia jest określenie na podstawie wyznaczonych doświadczalnie
charakterystyk statycznych i dynamicznych rzeczywistego obiektu regulacji, którym jest
proces. zmiany poziomu cieczy w zbiorniku otwartym, modelu matematycznego tego
procesu. Proces pozyskiwania modelu matematycznego nazywany jest identyfikacją obiektu.
1.WPROWADZENIE
Obiektem regulacji nazywamy zachodzący w urządzeniu proces
technologiczny podlegający oddziaływaniu zakłóceń, którego pożądany przebieg uzyskuje się
przez zewnętrzne oddziaływanie sterujące (sterowanie).
Przebiegi zautomatyzowanych procesów technologicznych są oceniane
(kontrolowane) na podstawie pomiarów wielkości charakteryzujących dany proces, a których
pożądany przebieg jest określony w zadaniu regulacji. Są to najczęściej wielkości fizyczne
takie jak np. temperatura, ciśnienie, lepkość, zawartość składników. Mówi się, że wielkości te
są wielkościami wyjściowymi obiektu regulacji (procesu) – wielkościami
regulowanymi oznaczanymi umownie symbolami – y
1
, y
2
, .... y
n
.
Aby dany proces technologiczny mógł być realizowany, muszą być do niego
doprowadzone odpowiednie strumienie materiałów (np. odpowiednie ilości reagujących ze
sobą składników) lub strumienie energii (np. paliwa, energii elektrycznej). Od wielkości tych
strumieni i od ich parametrów zależeć będzie pożądany przebieg wielkości regulowanych.
Zatem ilości dostarczanej energii lub materii są wielkościami wejściowymi x
1
,
x
2
,...x
m
obiektu regulacji (procesu). Innymi wielkościami wejściowymi są wielkości
wpływające niekorzystnie na przebieg wielkości regulowanych. Są to różnego rodzaju
zakłócenia (umownie oznaczane symbolami z
1
, z
2,
... z
k
). Zakłócenia te mogą bezpośrednio
oddziaływać na proces, np. w układzie regulacji temperatury takimi zakłóceniami są zmiany
temperatury otoczenia, lub zniekształcać doprowadzone do obiektu strumienie energii lub
materii, np. w układzie regulacji temperatury takimi zakłóceniami są zmiany wartości
opałowej paliwa. Związek między wielkościami regulowanymi a wejściowymi tworzy opis
obiektu w sensie procesowym (rys. 1a).
Urządzenia, w których realizowane są procesy technologiczne wyposażone są
w zespoły wykonawcze (ZW), którymi są np. zawory regulacyjne, pompy o zmiennej
wydajności, silniki, styczniki itp., umożliwiające dostarczanie strumieni energii lub
materiałów do procesu oraz w przetworniki pomiarowe (PP), dostarczające informacje o
przebiegu zmian wielkości regulowanych. Zespoły wykonawcze, w wyniku oddziaływania na
nie sygnałów sterujących oznaczanych stosując terminologię techniczną symbolami CV
1
,
CV
2
, ... CV
m
, i wytwarzanych przez regulatory (sterowniki), kształtują natężenie strumieni
materiałów lub energii. Sygnały te są wielkościami wejściowymi obiektu regulacji w sensie
aparaturowym jako elementu składowego układu regulacji. Wielkościami wyjściowymi tak
rozumianego obiektu regulacji są sygnały wyjściowe przetworników pomiarowych PV
1
, PV
2
,
Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
3
... PV
n
, nazywane zmiennymi procesowymi. Zależność zachodząca pomiędzy sygnałami
wyjściowymi obiektu (zmiennymi procesowymi) a jego sygnałami wejściowymi (sygnały
sterujące i zakłócenia) stanowi opis obiektu w sensie aparaturowym (rys.1b).
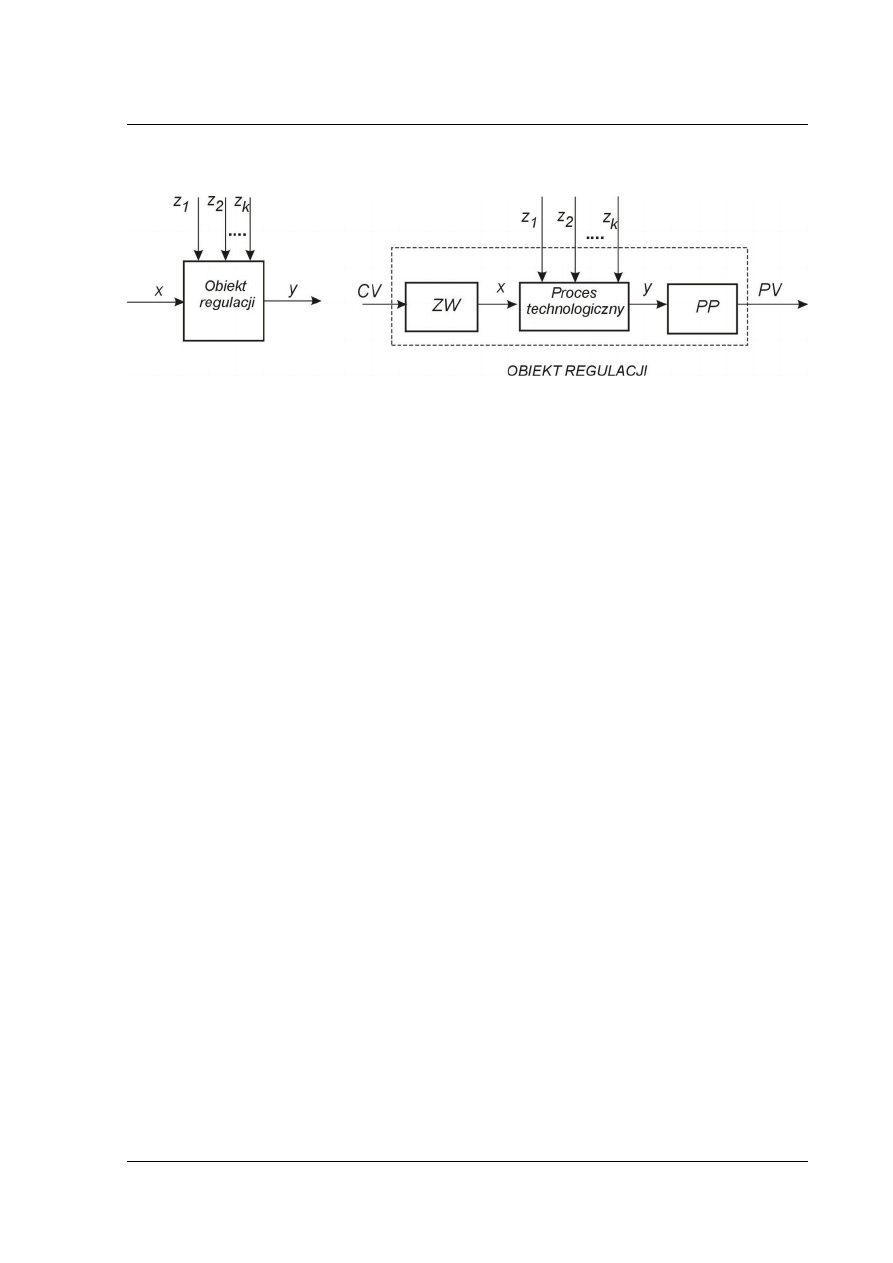
a) b)
Rys. 1. Schemat ideowy obiektu regulacji o jednej wielkości regulowanej : a) - obiekt
regulacji w sensie procesowym, b) – obiekt regulacji w sensie aparaturowym; oznaczenia: x, y
- wielkość wejściowa, wyjściowa obiektu w sensie procesowym, CV - sygnał sterujący, PV
- sygnał wyjściowy przetwornika pomiarowego (zmienna procesowa), z
1
, z
2
,….. z
k
–
zakłócenia
W najprostszych przypadkach, obiekt regulacji może mieć jeden sygnał wyjściowy
(jedną wielkość regulowaną) , jeden sygnał sterujący i wiele wielkości zakłócających (rys.
1a). Jego matematycznym opisem jest zależność sygnału wyjściowego od sygnałów
wejściowych
,
,….
|
(1)
która, w zależności od właściwości obiektu, może być równaniem algebraicznym albo
liniowym lub nieliniowym równaniem różniczkowym o stałych lub zmiennych
współczynnikach.
Poprawna ocena właściwości obiektów regulacji jest podstawowym
warunkiem umożliwiającym projektowanie układów regulacji. Na ogół analiza właściwości
obiektu przebiega dwuetapowo. Pierwszy etap jest analizą procesową, której efektem jest
ustalenie związków procesowych między wielkościami regulowanymi jako zmiennymi
fizycznymi a wielkościami wejściowymi procesu, którymi są najczęściej parametry strumieni
energii lub materiałów dostarczanych do procesu. Wyniki tej analizy są podstawą do
właściwego doboru przetwornika pomiarowego oraz zespołu wykonawczego, czyli do
poprawnego zaprojektowania obiektu regulacji w sensie aparaturowym. Ogólne związki
procesowe powinny zostać określone przez technologa, który najlepiej rozumie fizyczną
stronę procesu. Często jednak konieczna jest przy tym pomoc automatyka, aby opis
właściwości obiektu podany był w formie użytecznej dla celów regulacji.
Drugim etapem analizy jest określenie modelu matematycznego
zaprojektowanego w sensie aparaturowym obiektu jako związku między sygnałami
(zmiennymi procesowymi) PV a sygnałami sterowania CV i zakłóceniami. Tworzone modele
ze względu na ich cechy aplikacyjne mogą być modelami: globalnymi lub lokalnymi
(parametrycznymi).
Modele globalne ( bilansowe) tworzone dla celów analizy procesu technologicznego, jego
optymalizacji i prowadzenia rozruchu określane są na podstawie zależności między
zmiennymi procesowymi wiążącymi np. energię, masę, położenie i stan poszczególnych
Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
4
elementów tworzących proces w pełnym zakresie ich zmienności oraz na podstawie bilansów
tych wielkości dla całego obiektu. Model taki ma najczęściej postać nieliniowych zależności
różniczkowo-całkowych. Można go wykorzystać zarówno przy projektowaniu układu
regulacji jak i optymalizacji punktu pracy.
Modele lokalne (parametryczne) opisują właściwości obiektu w otoczeniu danego punktu
pracy co na ogół jest wystarczające do doboru parametrów zainstalowanych w układzie
regulacji elementów, do analizy stabilności układu z regulatorem oraz doboru algorytmu
sterowania i struktury układu regulacji. Model taki ma zazwyczaj postać założonego z góry
opisu matematycznego np. w postaci transmitancji operatorowych : obiektu oraz transmitancji
zakłóceniowych. których nieznane parametry określane są w procesie identyfikacji. Model
matematyczny obiektu może być także przedstawiony w postaci schematu blokowego , który
dostarcza informacji o strukturze obiektu, co jest pomocne przy projektowaniu struktury
układu regulacji. Przykładowy schemat blokowy obiektu o jednej wielkości regulowanej i
dwu działających zakłóceniach z
1
, z
2
opracowany dla zmiennych przyrostowych przedstawia
rys.2.
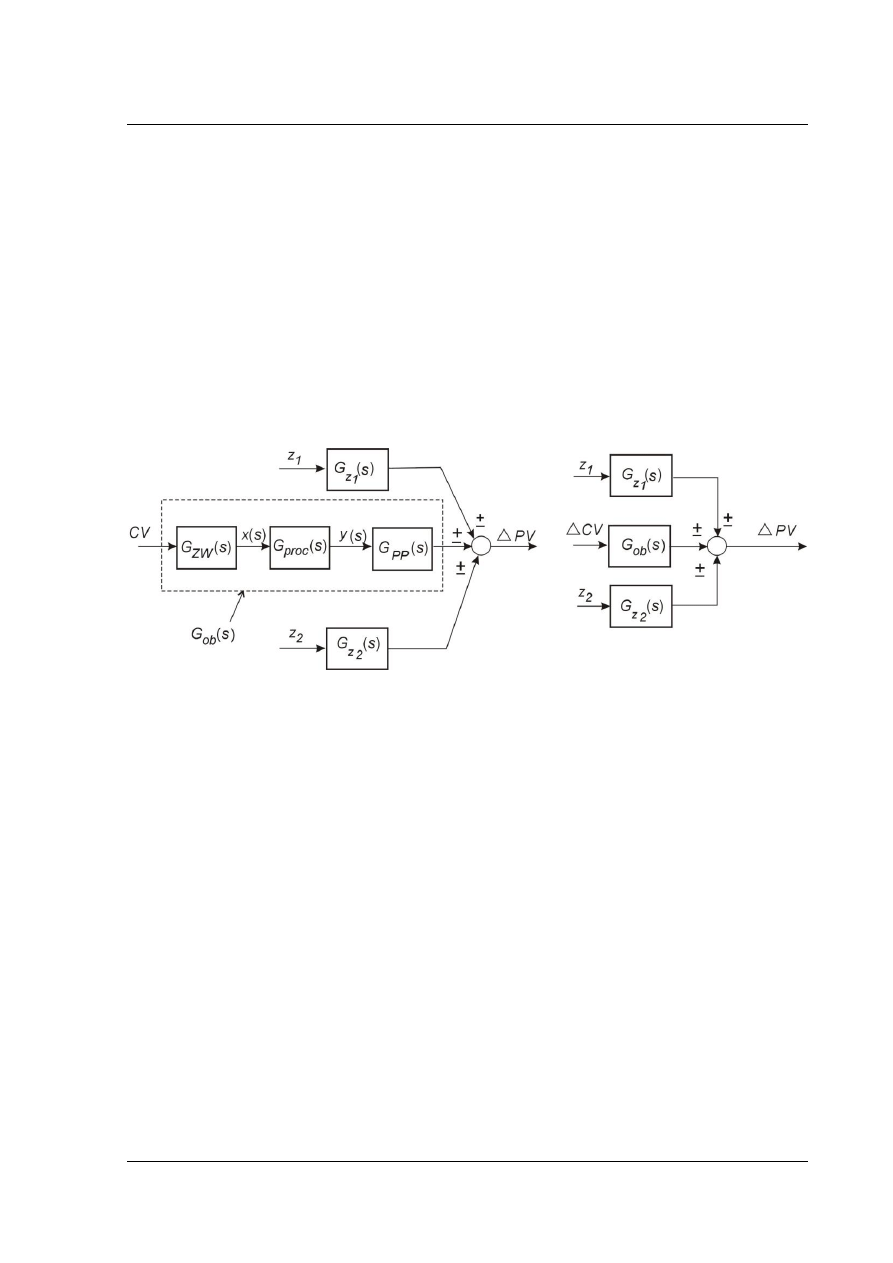
a)
b)
Rys. 2. Schemat blokowy obiektu regulacji : a) schemat szczegółowy, b) schemat
zastępczy
Jak już wcześniej wspomniano, obiekt regulacji w sensie aparaturowym to nie tylko
proces zachodzący w urządzeniu (transmitancja G
proc
(s)) ale także zespół wykonawczy ZW
(transmitancja G
ZW
(s)) sterowany sygnałem CV oraz przetwornik pomiarowy PP
(transmitancja G
PP
(s)) generujący sygnał PV (rys. 2a). Iloczyn tych transmitancji przedstawia
sobą wyrażoną operatorowo zależność wielkości procesowej PV od sterowania CV i jest
transmitancją operatorową obiektu określoną symbolem
|
(rys.2 b).
Charakter zmian wielkości regulowanej wywołany zakłóceniami określają transmitancje
zakłóceniowe
|
|
(transmitancje zakłóceniowe
ze względu na niemierzalność zakłóceń można określić w sposób przybliżony raczej
jakościowo niż ilościowo). Schemat blokowy z rys. 2a jest pozyskiwany i weryfikowany w
fazie projektowania i doboru poszczególnych zespołów instalacji obiektowej, natomiast
schemat z rys. 2b jest pozyskiwany w uruchomionym i działającym układzie regulacji .
Działające na obiekt zakłócenia, których jest najczęściej wiele są niemierzalne
i działają w sposób przypadkowy w różnych miejscach obiektu, w efekcie jednak zawsze
zaburzają pożądany przebieg procesu, a ich działanie ujawnia się poprzez zmiany wielkości
regulowanej a zatem i zmiennej procesowej powodując jej wzrost wartości lub jej spadek.
Również zależnie od konstrukcji zespołu wykonawczego , natury fizycznej i właściwości
Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
5
procesu oraz charakterystyki statycznej zastosowanego przetwornika pomiarowego, wzrost
wartości sygnału wyjściowego CV regulatora sterującego procesem ma wywoływać wzrost
lub spadek wartości wielkości regulowanej. Oddziaływania te zostały na schemacie
blokowym z rys. 2 przedstawione za pośrednictwem węzła sumacyjnego. Znaki w węźle
sumacyjnym pokazują możliwe kierunki oddziaływań sterowania i zakłóceń.
Pozyskiwanie modelu może być realizowane analitycznie na podstawie znajomości
równań opisujących zależności fizyko - chemicznych obiektu lub eksperymentalnie. Metoda
eksperymentalna może być eksperymentem czynnym lub biernym.
Eksperyment czynny polega na pobudzeniu obiektu zdeterminowanym wymuszeniem.
Jest to najczęściej wymuszenie skokowe, impulsowe lub sinusoidalnie zmienne. Otrzymana
odpowiedź na to wymuszenie pozwala na podstawie odpowiednich konstrukcji graficznych
określić parametry założonego modelu matematycznego , który ze względów praktycznych i
projektowych ma postać niezbyt złożonej transmitancji tzw. transmitancji zastępczej.
Transmitancja ta w sposób przybliżony oddaje właściwości rzeczywistego badanego obiektu
w otoczeniu wybranego punktu pracy. Przed rozpoczęciem doświadczenia obiekt musi
znajdować się w stanie ustalonym. Dokładność identyfikacji zależy od amplitudy
wymuszenia, która winna być na tyle duża aby zminimalizować wpływ zakłóceń a na tyle
mała aby nie wprowadzić obiektu w nasycenie. Czas trwania wymuszenia powinien być
dostatecznie długi aby możliwe było ujawnienie charakteru odpowiedzi.
Obiekty podobnie jak inne elementy automatyki, klasyfikuje się ze względu na ich
właściwości dynamiczne. Taką najbardziej ogólną klasyfikacją jest podział ze względu na
zdolność osiągania lub nie osiągania równowagi trwałej po wprowadzeniu wymuszenia
skokowego. Z tego punktu widzenia obiekty dzieli się na :
statyczne ,
astatyczne.
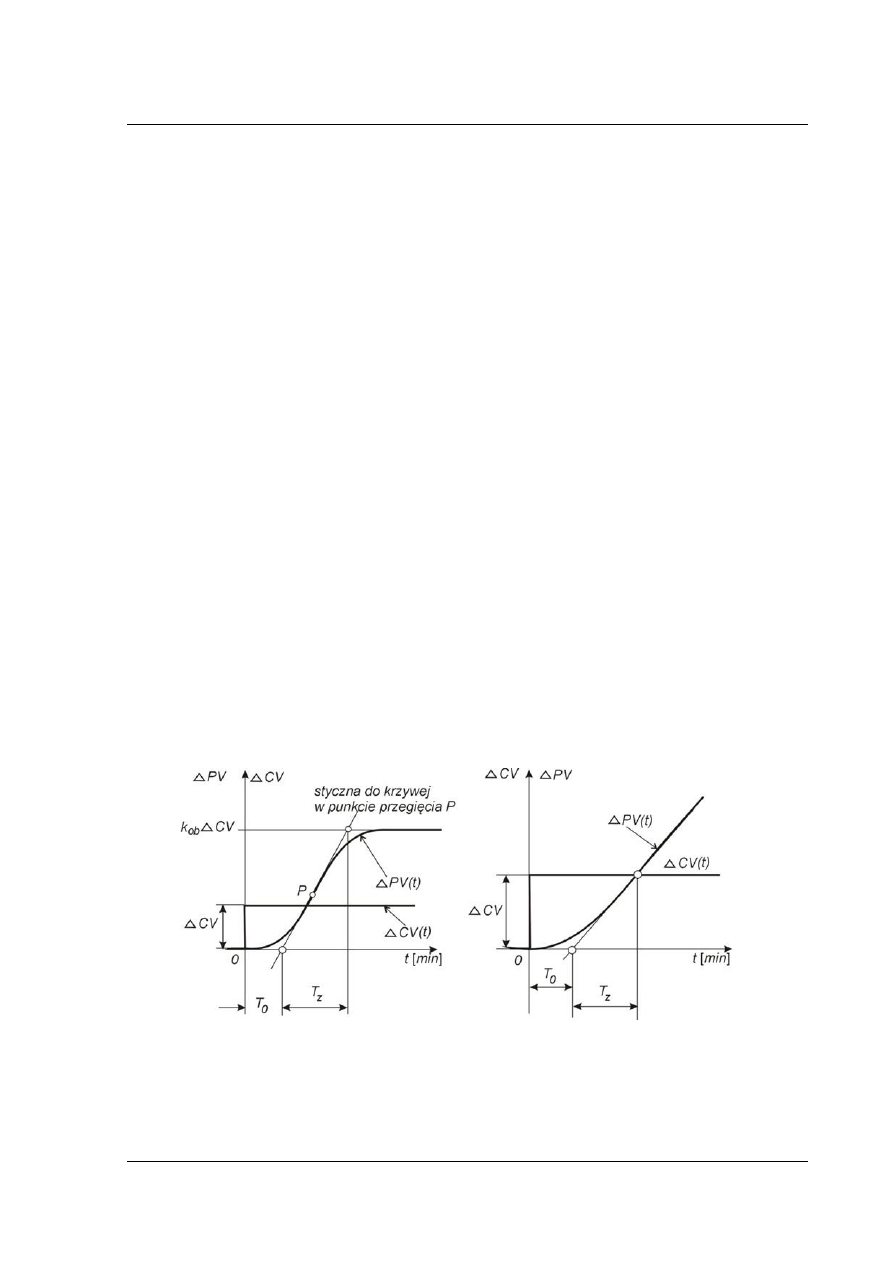
Przykładowe odpowiedzi obiektów statycznych i astatycznych na wymuszenie
skokowe sterowania CV wykonane we współrzędnych przyrostowych przedstawia rys.3.
a)
b)
Rys. 3. Przykładowe ogólne odpowiedzi na wymuszenie skokowe a) obiektu
statycznego, b) astatycznego.
Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
6
Dla obiektów statycznych, których odpowiedź skokowa ma przebieg jak na rys.3a
przyjmuje się najczęściej następujące modele matematyczne przedstawione w postaci
transmitancji operatorowej:
s
T
e
s
z
T
ob
k
s
CV
s
PV
s
ob
G
0
1
)
(
)
(
)
(
(2)
lub
s
e
n
Ts
ob
k
s
CV
s
PV
s
ob
G
)
(
)
(
)
(
)
(
1
(3)
gdzie:
k
ob
–wzmocnienie obiektu (w sensie aparaturowym wielkość niemianowana),
T
z
– zastępcza stała czasowa [min],
T
0
– zastępczy czas opóźnienia [min].
Parametry modelu obiektu regulacji określonego wzorem (2) można określić z
odpowiedzi na wymuszenie skokowe stosując metodę : stycznej (rys.3a) lub siecznej (rys.4).
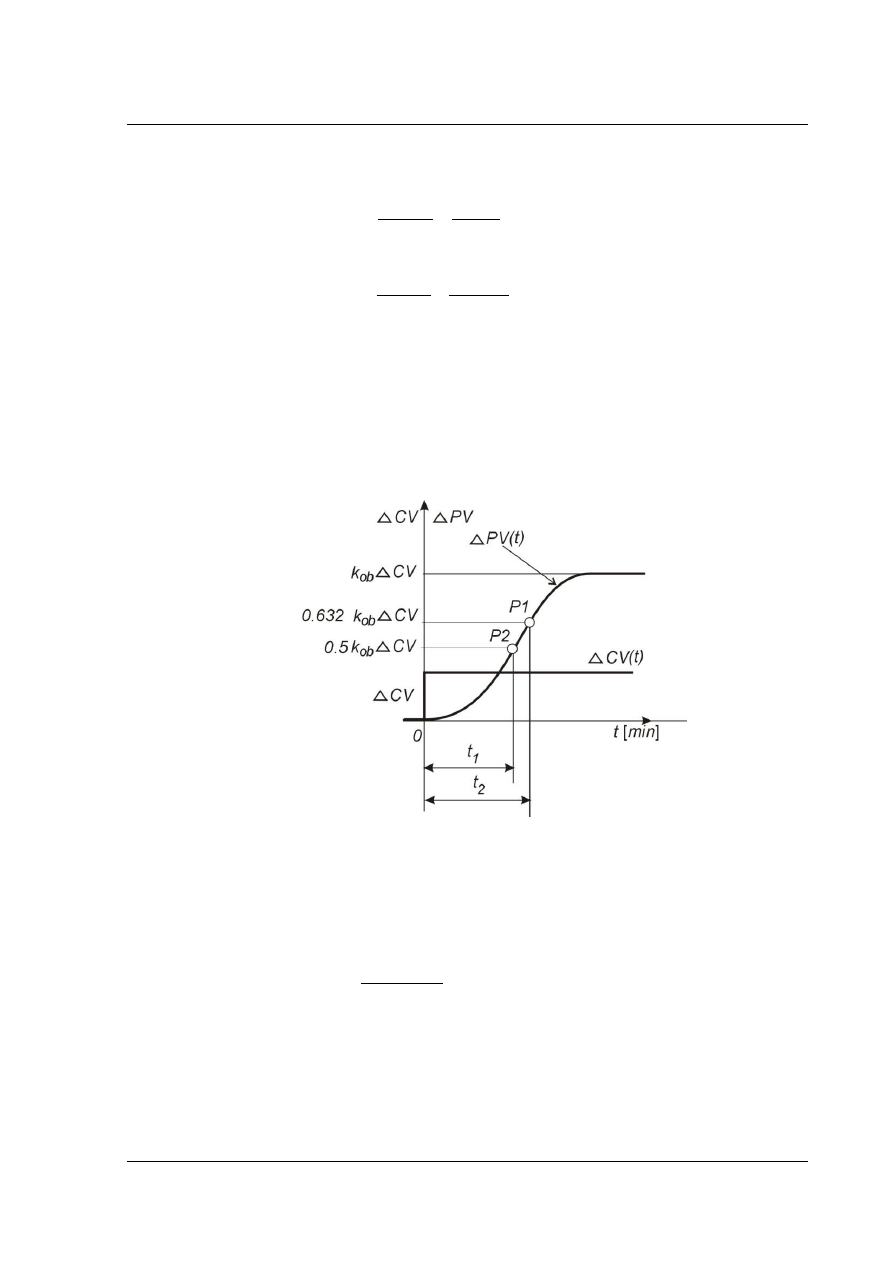
Rys.4. Ilustracja metody siecznej wyznaczania stałych czasowych modelu (2) obiektu
regulacji
W przypadku metody stycznej parametry te określa się bezpośrednio z wykresu tak
jak to pokazuje rys.3a, natomiast stosując metodę siecznej (rys.4) przechodzącej przez punkty
P1, P2, wartości stałych czasowych T
0
, T
z
określa się z zależności
0
2
2
1
2
2
1
0
T
t
z
T
t
t
T
ln
)
ln
(4)
Parametry modelu określonego wzorem (3) zwanego modelem Strejca określa się z
wykresu i z tablic podanych w literaturze.
Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
7
Dla obiektów astatycznych, których odpowiedź skokowa ma przebieg jak na rys.3b
przyjmuje się najczęściej model matematyczny przedstawiony w postaci transmitancji
operatorowej
s
T
e
s
z
T
s
CV
s
PV
s
ob
G
0
1
)
(
)
(
)
(
(5)
Parametry modelu określonego wzorem (5) odczytuje się wprost z wykresu na rys.3b.
W eksperymencie biernym parametry modelu określa się na podstawie pomiaru
dostępnych sygnałów podczas normalnej pracy układu regulacji bez konieczności
przerywania jego pracy i naruszania warunków eksploatacji. W metodzie tej nie mamy
wpływu na sygnały podawane na obiekt i identyfikacja obiektu jest w tej metodzie trudna ze
względu na często niską zdolność pobudzającą sygnałów. Analiza sygnałów pozwala określić
model tzw. stochastyczny, który ze względu na dokładność opisu właściwości obiektu może
być wykorzystywany w systemach diagnostycznych lub do optymalizacji procesu regulacji
lub też opracowania innego od standardowego algorytmu regulacji.
Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
8
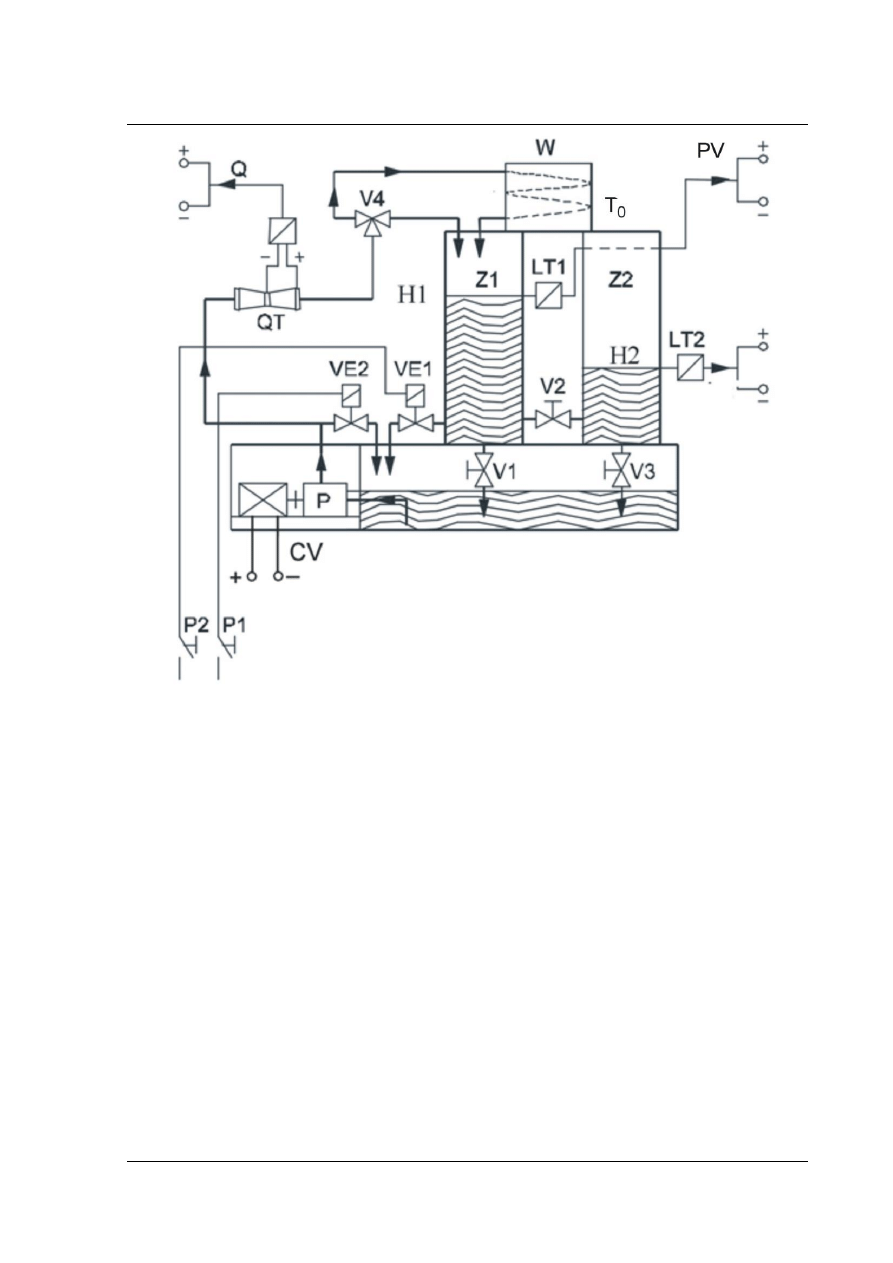
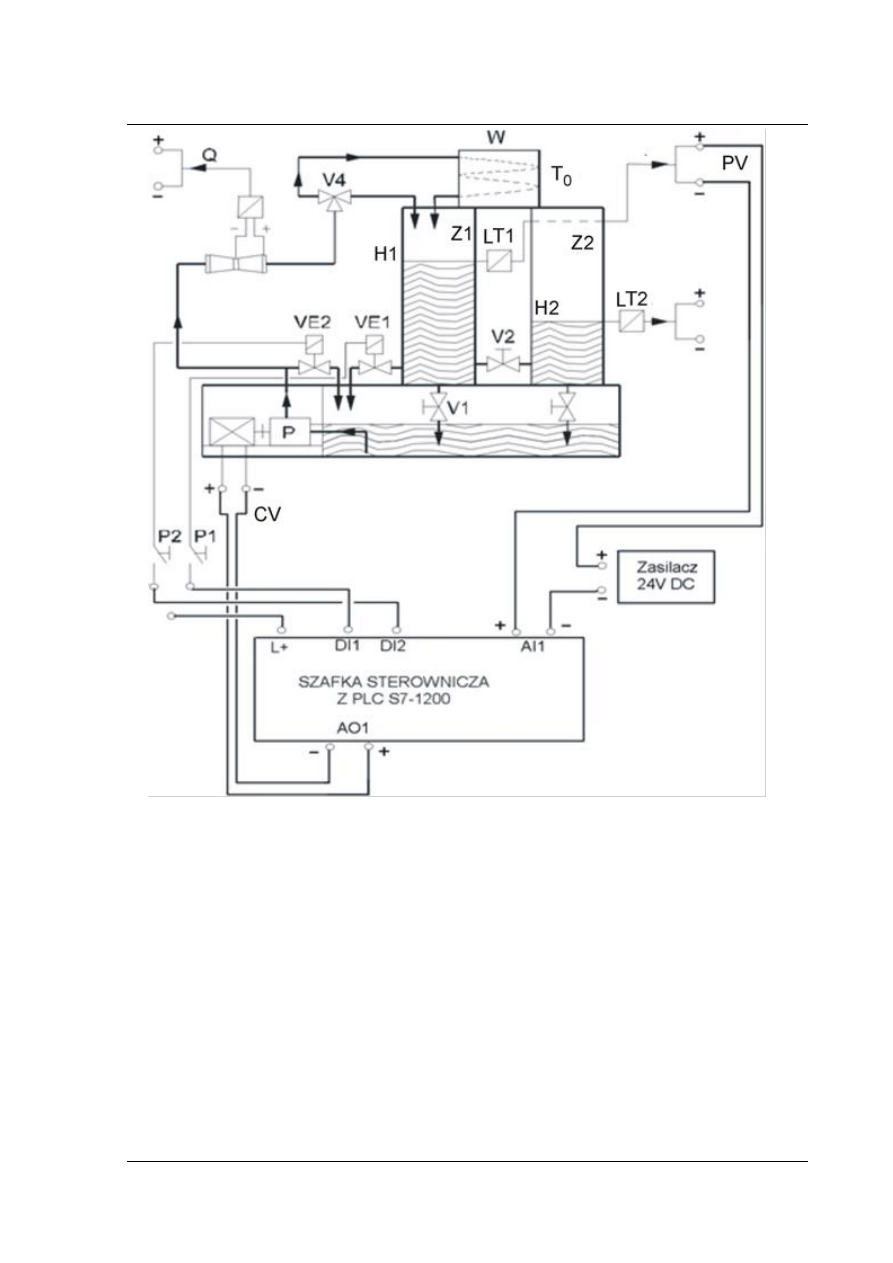
2. OPIS INSTALACJI OBIEKTOWEJ
Obiektem regulacji jest proces zmiany poziomu cieczy w odpowiednio połączonych
zbiornikach Z1, Z2. Schemat instalacji obiektowej przedstawia rys.5.
W zależności od konfiguracji stanów zaworów V2 i V4 oraz zastosowaniu na dopływie
specjalnie skonstruowanej wężownicy W można realizować różne właściwości obiektu
regulacji podane w tablicy 1.
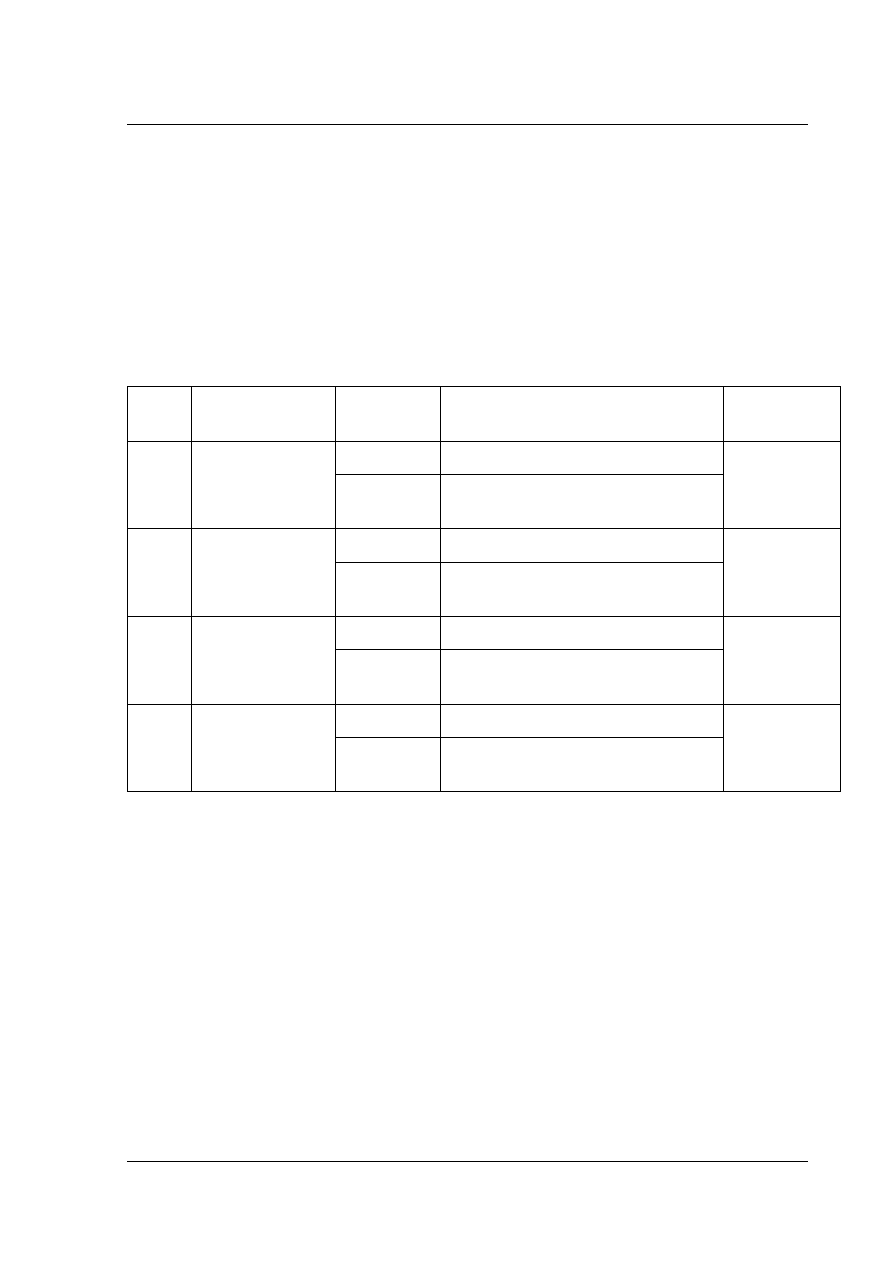
Tablica1. Właściwości obiektu w zależności od konfiguracji zaworów
l.p.
Typ właściwości
obiektu
Zawór
Ustawienie zaworu
Wielkość
regulowana
1.
Inercyjny I rzędu
bez opóźnienia
V2
Zamknięty
poziom H1
V4
Ciecz wpływa bezpośrednio do
zbiornika Z1
2.
Inercyjny I rzędu
z opóźnieniem
V2
Zamknięty
poziom H1
V4
Ciecz wpływa do zbiornika Z1 przez
wężownicę W
3.
Inercyjny II rzędu
bez opóźnienia
V2
Otwarty
poziom H2
V4
Ciecz wpływa bezpośrednio do
zbiornika Z1
4.
Inercyjny II rzędu
z opóźnieniem
V2
Otwarty
poziom H2
V4
Ciecz wpływa do zbiornika Z1 przez
wężownicę W
Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
9
Rys.5. Schemat części obiektowej stanowiska układu regulacji poziomu cieczy
Oznaczenia :
Z1, Z2 – zbiorniki,
V1, V3- ręczne zawory odpływowe,
V2- ręczny zawór łączący zbiorniki Z1 i Z2,
V4 - zawór trójdrożny ,
W- wężownica, T
0
- opóźnienie transportowe wprowadzane przez wężownicę,
VE1- zawór elektromagnetyczny odcinający odpływ ze zbiornika Z1,
VE2 - zawór elektromagnetyczny odcinający zrzut wody na tłoczeniu z pompy,
H1 , H2 - wysokość słupa cieczy w zbiorniku Z1, Z2,
PV – sygnał wyjściowy z przetwornika poziomu cieczy
LT1, LT2 – przetworniki poziomu cieczy w zbiorniku Z1, Z2,
Q -sygnał wyjściowy z przetwornika QT przepływu (przepływomierz zwężkowy),
P- pompa o zmiennej wydajności,
CV- sygnał sterujący pompą (wyjściowy ze sterownika PLC),
P1, P2 - przełączniki ręczne zaworów elektromagnetycznych do wprowadzania zakłóceń.

Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
10
Połączenie zbiorników realizowane jest za pomocą zaworu odcinającego V2. Wielkością
regulowaną jest wysokość słupa cieczy H1 w zbiorniku Z1 lub H2 w zbiorniku Z2.
Wymaganiem stawianym badanemu układowi regulacji jest utrzymanie na zadanym stałym
poziomie wysokości słupa wody mimo działających na obiekt zakłóceń.
Wielkościami zakłócającymi są zmiany przepływu cieczy na dopływie lub odpływie
zbiorników. Zakłócenia te realizowane są przez zdalnie sterowane odcinające zawory
elektromagnetyczne VE1, VE2. Zamykanie/otwieranie zaworów realizowane jest za pomocą
przycisków P1 i P2 znajdujących się na pulpicie instalacji obiektowej stanowiska. Zawór VE1
wywołuje skokową zmianę przepływu na odpływie ze zbiornika Z1. Jest to zakłócenie VE1.
Zawór VE2 wywołuje skokową zmianę przepływu na dopływie cieczy do zbiornika Z1 (tzw.
zrzut z pompy). Jest to zakłócenie VE2.
Wielkością sterującą obiektem jest sygnał standardowy 4 - 20 mA pochodzący ze
sterownika PLC Simatic S7-1200 firmy Siemens. Sygnał ten zostaje przekształcony przez
odpowiedni układ elektroniczny na sygnał napięciowy 0 – 10 V i steruje pompą, której
wydajność zmienia się w granicach: 0 – 6.5 l/min na dopływie do zbiornika Z1. Pompa ta
pełni rolę elementu wykonawczego w układzie regulacji. Dodatkowo dokonywany jest
pomiar przepływu za pomocą przepływomierza zwężkowego. Zmiana przepływu w zakresie
0 -6.5 l/min wywołuje różnicę ciśnień na zastosowanej zwężce Venturiego w zakresie
0 -500 mm H
2
O Zastosowany przetwornik różnicy ciśnień przetwarza różnicę ciśnienia na
zwężce w sygnał standardowy o zakresie 4 – 20 mA.
Informację o bieżącej wartości wielkości regulowanej wysokości H1 lub H2 słupa cieczy
dostarczają elektryczne przetworniki pomiarowe o zakresie 0 - 500 mm H
2
O i sygnale
wyjściowym 4 - 20 mA (pomiar wysokości słupa cieczy odbywa się metodą pośrednią
poprzez pomiar ciśnienia hydrostatycznego).

Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
11
3. PRZEBIEG ĆWICZENIA
Identyfikację opisanego obiektu regulacji przeprowadzimy w układzie regulacji o
schemacie przedstawionym na rys.6.
Identyfikacja obiektu przeprowadzona będzie na podstawie pomiaru charakterystyki
statycznej obiektu w pełnym możliwym zakresie zmian wielkości regulowanej oraz
odpowiedzi badanego obiektu na celowo wprowadzone wymuszenie skokowe w wybranym z
charakterystyki statycznej punkcie pracy. Będzie to zatem eksperyment czynny, w którym
celowe oddziaływanie na obiekt odbywać się będzie poprzez sygnał sterowania zadawany
przez operatora.
Pomiary właściwości statycznych i dynamicznych obiektu przeprowadzone zostaną w
układzie regulacji stałowartościowej poziomu cieczy pracującego w trybie sterowania
ręcznego „Manual”. Właściwości statyczne i dynamiczne będą reprezentowane poprzez
związki między wielkością regulowaną, którą jest wysokość H1 słupa cieczy w zbiorniku Z1
przetworzoną na sygnał mierzony PV, a sygnałem sterującym CV oraz między wielkością
regulowaną a wielkościami zakłócającymi proces zmiany poziomu cieczy w zbiorniku.
Związki te reprezentować będą: transmitancja operatorowa obiektu G
ob
(s) oraz transmitancje
zakłóceniowe G
z1
(s), G
z2
(s). Transmitancje te reprezentować będą właściwości dynamiczne w
otoczeniu wybranego z charakterystyki statycznej punktu pracy procesu.
Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
12
Rys.6. Schemat połączeń elementów układu regulacji poziomu cieczy
W skład stanowiska laboratoryjnego wchodzą:
zespół zbiorników połączonych szeregowo,
sterownik PLC SIMATIC S7-1200 firmy Siemens wraz z modułem wejść/wyjść
analogowych wraz z zasilaczem 24V,
panel HMI
komputer stacjon
a
rny
Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
13
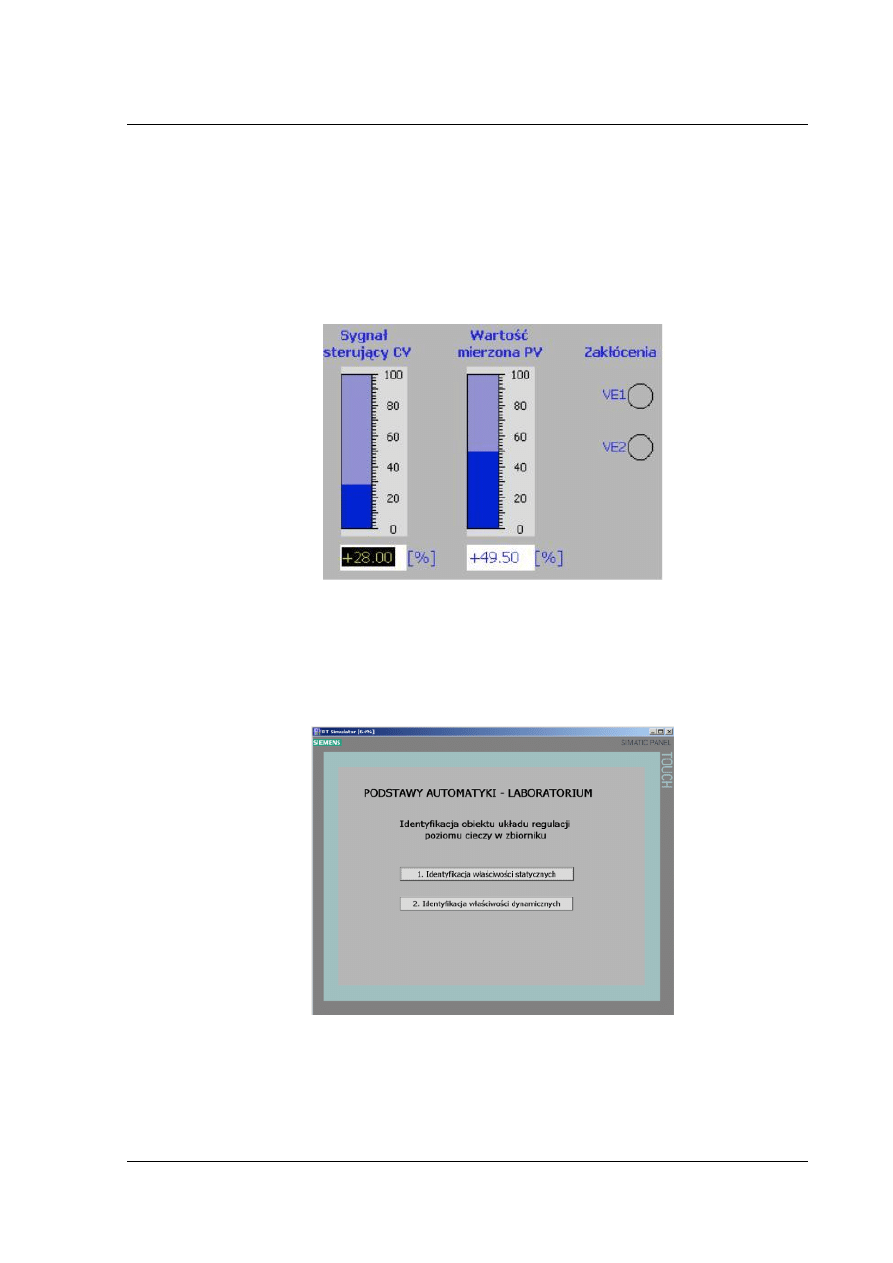
3.1.Wizualizacja
Podczas wykonywania ćwiczenia student komunikuje się ze sterownikiem PLC
za pośrednictwem panelu operatorskiego HMI typu SIMATIC KPT600 z dotykowym
kolorowym ekranem. Umieszczona na panelu wizualizacja umożliwia odczyt oraz zmianę
sygnału CV sterującego odczyt wartości wielkości mierzonej PV. Wielkości te są także
monitorowane na wykresach słupkowych.
Rys.7. Wizualizacja pulpitu operatorskiego sterownika na ekranie panelu HMI
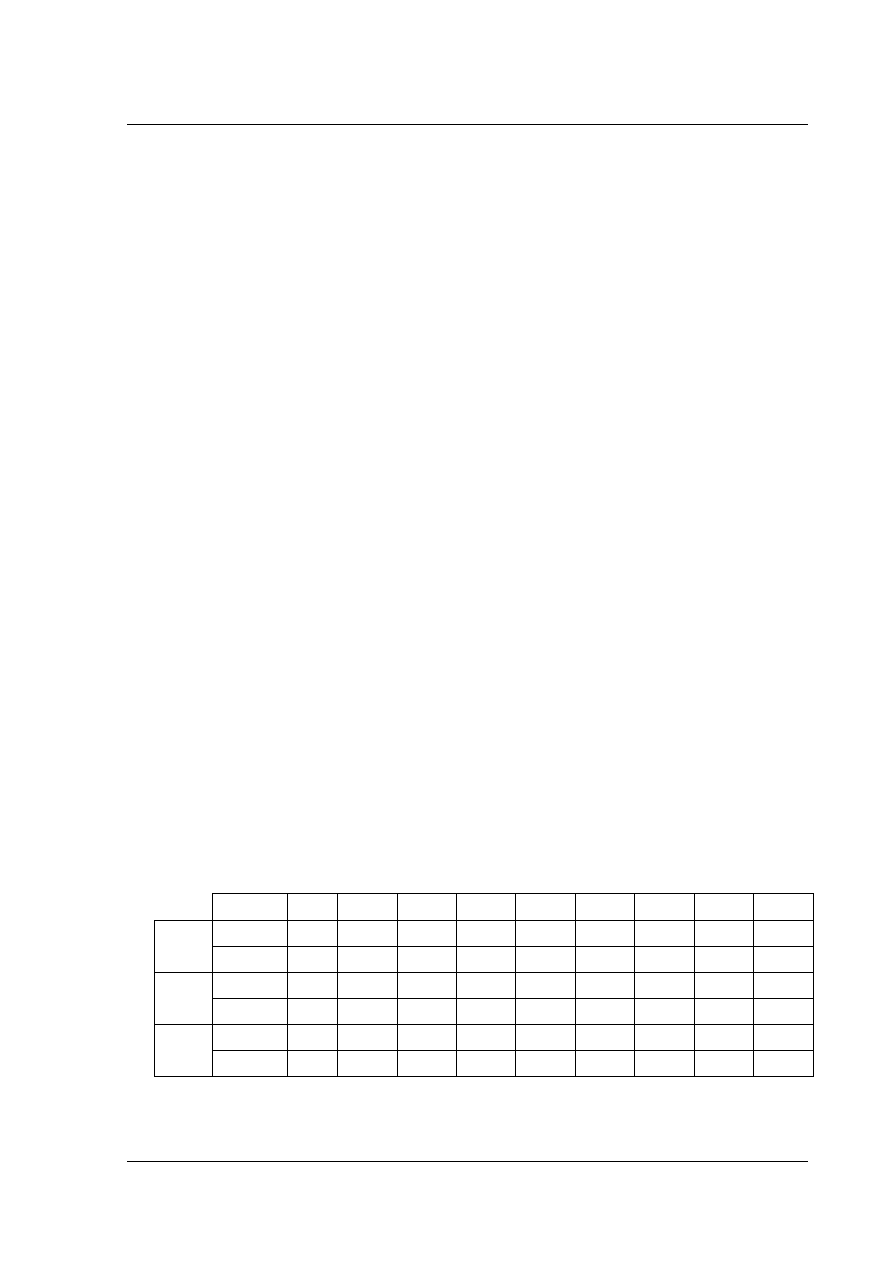
Druga wizualizacja, zrealizowana została na komputerze. W menu głównym
wyświetlanym na ekranie monitora komputera (rys.8) operator wybiera pulpitu
operatorskiego odpowiedniego do aktualnego etapu ćwiczenia.
Rys.8. Menu główne wizualizacji na ekranie monitora
Na monitorze, panelu o przekątnej 15'', możliwe jest śledzenie trendów wyświetlanych
z dużą dokładnością, co umożliwia późniejszą ich obróbkę. Możliwe jest zatrzymywanie
wykresów, zmienianie skali osi czasu, aby dostosować wykres do swoich potrzeb. Na ekranie
ukazane są bieżące wartości PV i CV, obecność zakłóceń VE1 i VE2.
Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
14
Identyfikacja będzie przeprowadzana dla obiektu w konfiguracji 2 (tablica 1),
należy więc sprawdzić położenie zaworów, a także dokładnie skontrolować wykonane
połączenia elektryczne (rys. 6.), ewentualne wątpliwości skonsultować z prowadzącym.
3.2. Identyfikacja eksperymentalna właściwości statycznych obiektu regulacji
Identyfikacja właściwości statycznych obiektu sprowadzać się będzie do pomiaru
charakterystyk statycznych obiektu jako związku w stanie ustalonym wielkości regulowanej
od sterowania w pełnym zakresie działających zakłóceń. Charakterystyki te są istotne do
określenia możliwych punktów pracy obiektu i dopuszczalnych sterowań. Charakterystyki
statyczne wykonywane będą dla trzech oddzielnych przypadków:
1. Zawory VE1 i VE2 zamknięte => brak zakłóceń
2. Zawór VE1 – otwarty, VE2 – zamknięty => zakłócenie VE1
3. Zawór VE1 – zamknięty , VE2 – otwarty => zakłócenie VE2.
Wyniki pomiarów należy zamieścić w odpowiednich komórkach tablicy 2.
Każdy z tych przypadków wymaga przeprowadzenia takiej samej procedury, którą
przedstawiono poniżej:
a) Na głównym ekranie wizualizacji na komputerze, wybrać opcję: Identyfikacja
właściwości statycznych.
b) Sprawdzić położenie zaworów VE1 i VE2 poprzez skontrolowanie stanu
przełączników P1 i P2, bądź lampek kontrolnych na wizualizacji komputerowej.
c) Ustawić na panelu HMI sygnał sterujący pompą CV na wartość 0%
d) Odczytać i zapisać bieżącą wartość PV poziomu wody.
e) Odczytać poziom wody H1 wykorzystując skalę umieszczoną na ściance zbiornika.
f) Wykonać punkty od c) do e) zmieniając wartość sygnału sterującego pompą CV
zgodnie z tablicą 2.
Procedurę powtórzyć dla kolejnych dwóch przypadków.
.Wyniki pomiarów zamieścić w tablicy 2.
Tablica 2. Wyniki pomiarów charakterystyki statycznej obiektu regulacji
CV[%]
0
20
30
40
50
60
70
80
100
1.
H1[cm]
PV[%]
2.
H1[cm]
PV[%]
3.
H1[cm]
PV[%]

Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
15
3.3. Identyfikacja właściwości dynamicznych obiektu regulacji
Celem identyfikacji będzie określenie parametrów transmitancji zastępczych: obiektu i
zakłóceniowych. Identyfikacja ta zostanie przeprowadzona metodą eksperymentu czynnego w
którym wykorzystano metodę odpowiedzi skokowej generując skokowe zmiany sygnału
sterującego CV i wielkości zakłócających. Metoda ta pozwala na wyznaczenie parametrów
założonej transmitancji obiektu na podstawie prostych konstrukcji graficznych. Z
otrzymanych z badań odpowiedzi obiektu na zakłócenia skokowe określać się będzie
transmitancje operatorową obiektu względem sterowania G
ob.
(s) , oraz transmitancje
operatorowe obiektu G
z1.
(s), G
z2.
(s) względem zakłóceń .
3.3.1. Wyznaczenie odpowiedzi skoko
wej obiektu regulacji na zmianę
sterowania CV (z
większenie wydajności pompy) w układzie otwartym.
Określenie parametrów transmitancji G
ob
(s)
Badania przeprowadzić stosując poniższą procedurę:
a) Z głównego menu wizualizacji wybrać: Identyfikacja właściwości dynamicznych
b) Wcisnąć przycisk Obiekt – zostanie ustawiona odpowiednia skala wykresu
c) Sprawdzić, czy zawory VE1 i VE2 są zamknięte
d) Na panelu HMI ustawić CV=50%
e) Odczekać aż PV osiągnie ustaloną wartość
f) Zmienić wartość CV z 50% na 60%
g) Odczekać aż poziom wody się ustali, tzn. PV ≈ const
h) Zapisać cały przebieg przejściowy na komputerze dobierając odpowiedni przedział
czasu. Zaleca się przyjąć ok. 300 sek.
i) Po zatrzymaniu przebiegu na monitorze przyciskiem STOP, wcisnąć na klawiaturze
komputera przycisk prtsc ,wkleić zapamiętany ekran do edytora graficznego i
wydrukować dwie kopie przebiegu przejściowego ( do obróbki wykresu stosując
metodę stycznej (rys.9) i siecznej rys.4).
Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
16
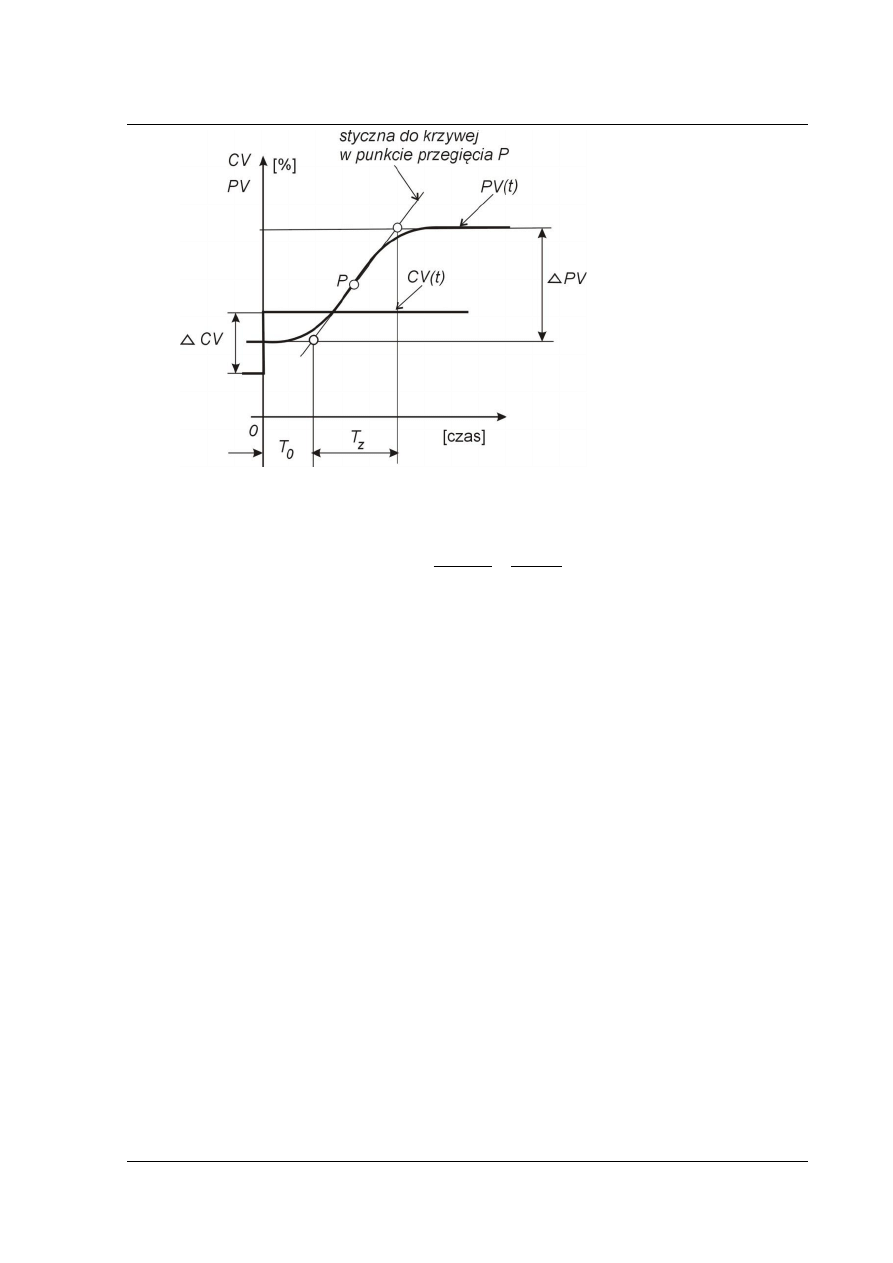
Rys.9. Przykład konstrukcji
graficznej do określania
parametrów transmitancji
operatorowej obiektu
wyznaczonych metodą stycznej
Otrzymany przebieg będzie miał postać jak na rys.9 Zgodnie z rys.9, dla badanego
obiektu można przyjąć model matematyczny opisany transmitancją (2) :
s
T
e
s
z
T
ob
k
s
CV
s
PV
s
ob
G
0
1
)
(
)
(
)
(
(6)
Z zarejestrowanego przebiegu należy odczytać wartości parametrów zastępczej
transmitancji operatorowej obiektu :T
z
,T
0
, k
ob
. Parametry te należy odczytać stosując metodę
stycznej (rys.9) oraz metodę siecznej (rys.4).
Przedstawione transmitancje zostaną zastosowane do doboru nastaw regulatora
w układzie regulacji poziomu cieczy w zbiorniku.
3.3.2
.
Wyznaczenie odpowiedzi skokowej obiekt
u dla zakłócenia wywołanego
zwiększeniem odpływu cieczy (skokowa zmiana otwarcia zaworu VE1).
Określenie parametrów transmitancji zakłóceniowej G
z1
(s)
Wykonać następujące czynności:
a) Z głównego menu wizualizacji wybrać: Identyfikacja właściwości dynamicznych
b) Wcisnąć przycisk Zakłócenie – zostanie ustawiona odpowiednia skala wykresu
c) Sprawdzić, czy zawory VE1 i VE2 są zamknięte
d) Na panelu HMI ustawić CV=50%
e) Odczekać aż poziom wody się ustali, tzn. PV ≈ const.
f) Przełącznikiem P1 (rys.6) wprowadzić zakłócenie VE1
g) Poczekać na ustalenie się poziomu
h) Zapisać cały przebieg przejściowy, który posłuży do wyznaczenia parametrów
założonej transmitancji:

Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
17
s
T
e
s
T
k
s
f
s
PV
s
z
G
0
1
1
1
1
)
(
)
(
)
(
(7)
f- zmiana powierzchni przepływowej zaworu VE1. Wg danych katalogowych
f = 30.4 %
Na zarejestrowanym wykresie odczytać
PV i obliczyć w ten sposób wartość
f
PV
k
1
3.3.3.
Wyznaczenie odpowiedzi skokowej obiektu wywołanej zmianą otwarcia
zaworu VE2 („zrzut” z pompy). Określenie parametrów transmitancji
zakłóceniowej G
z2
(s)
Należy wykonać następujące czynności:
a) Z głównego menu wizualizacji wybrać: Identyfikacja właściwości dynamicznych
b) Wcisnąć przycisk Zakłócenie – zostanie ustawiona odpowiednia skala wykresu
c) Sprawdzić, czy zawory VE1 i VE2 są zamknięte
d) Na panelu HMI ustawić CV=50%
e) Odczekać aż poziom wody się ustali, tzn. PV ≈ const
f) Przełącznikiem P2 (rys.5) wprowadzić zakłócenie VE2
g) Poczekać na ustalenie się poziomu
h) Zapisać cały przebieg przejściowy, który posłuży do wyznaczenia transmitancji:
s
T
e
s
T
k
s
f
s
PV
s
z
G
0
1
2
2
2
)
(
)
(
)
(
(8)
f- zmiana powierzchni przepływowej zaworu VE1, wg danych katalogowych
f = 30.4 %.
Z zarejestrowanego wykresu odczytać
PV i obliczyć podobnie jak w p.3.3.2 wartość k
2
.

Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
18
4. SPRAWOZDANIE Z ĆWICZENIA
Sprawozdanie winno zawierać takie elementy jak: opis przebiegu ćwiczenia ,
schematy, wykresy otrzymane z rejestratora z naniesioną obróbką danych, wykresy wykonane
na podstawie pomiarów itp. oraz odpowiedzi na pytania poniżej:
1) Określ parametry transmitancji obiektu stosując metodę siecznej oraz stycznej.
2) Określ przebieg odpowiedzi skokowej obiektu obliczony na podstawie przyjętych
transmitancji i dokonaj porównania z przebiegiem rzeczywistym.
3) Narysuj schemat blokowy badanego obiektu regulacji oraz przeprowadź jego analizę.
4) Narysuj charakterystykę statyczną obiektu i przeprowadź analizę właściwości
statycznych obiektu,
5) Określ na podstawie charakterystyki statycznej obiektu możliwe punkty pracy układu
regulacji
6) Porównaj wartość wzmocnienia obiektu k
ob
otrzymaną z charakterystyki statycznej
obiektu oraz z charakterystyki skokowej. Skomentuj otrzymane wyniki.
7) Określ na podstawie schematu blokowego obiektu jaki winien być kierunek działania
regulatora w układzie zamkniętym.

Ćwiczenie PA7a
„Identyfikacja obiektu układu regulacji poziomu cieczy
w zbiorniku otwartym”
PODSTAWY AUTOMATYKI
19
5. LITERATURA
1.Kościelny W.J.: Materiały pomocnicze do nauczania podstaw automatyki dla
studiów wieczorowych, WPW, 1997, 2001.
2. Węgrzyn S.: Podstawy automatyki. PWN 1980
3. Żelazny M.: Podstawy automatyki . PWN, 1976
Wyszukiwarka
Podobne podstrony:
ĆWICZENIE NR 2A, Biotechnologia, Fizyka, Labolatorium
cwiczenie pa 1
cwiczenie pa 2b
PA cwiczenia skrypt
podstawy automatyki ćwiczenia lista nr 2a
cwiczenie projektowe nr 2A id 1 Nieznany
Rozwiązania - Ćwiczenia powtorzeniowe mikroekonomia - mgr Paulina Krystosiak, WSFiZ Finanse i rachun
PA, Projekt AiR cwiczenia
2a.Japonia - walka z otyłością, Zdrowie publiczne, W. Leśnikowska - Ścigalska - ĆWICZENIA I sem, cz.
Opracowane zagadnienia na zaliczenie ćwiczeń - konstytucyjny system, studia, Administracja I stopnia
2a. Emergentny strukturalizm socjologiczny, Ćwiczenia - dr K
Nauka o pa, Stosunki międzynarodowe - materiały, I semestr, Nauka o państwie (ćwiczenia)
lista 2a, Elektrotechnika, PODSTAWY ELEKTROTECHNIKI, ćwiczenia
cwiczenie 2a pdf
Har PA wzg.DOC, Harmonogram ćwiczeń
więcej podobnych podstron