1
Wykład 2
Naprężenia główne
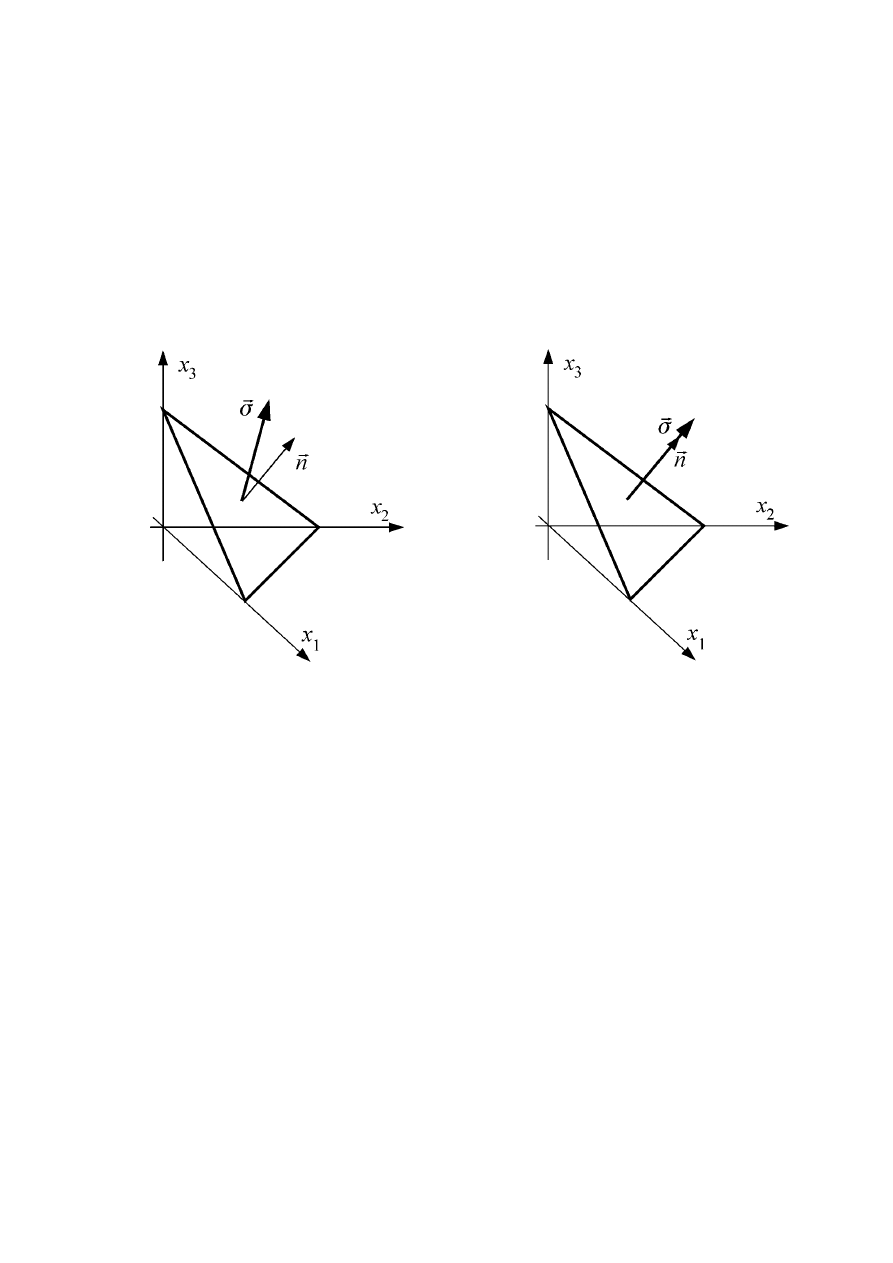
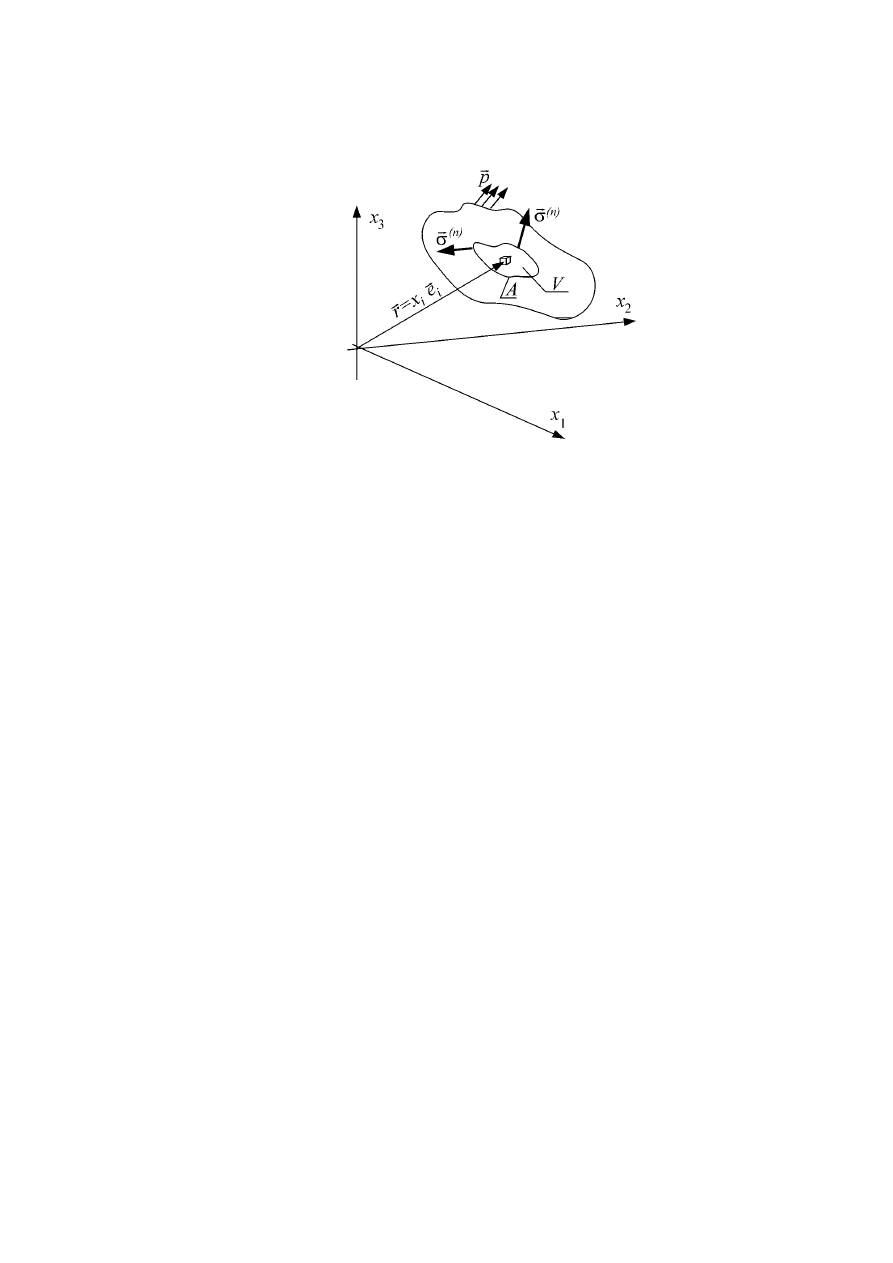
Poszukajmy płaszczyzny dowolnie nachylonej do osi układu współrzędnych i o tej
własności, by wektor naprężenia na tej płaszczyźnie był współosiowy z wektorem
nr
,
wektorem który orientuje tę płaszczyznę w przestrzeni (wektorem do niej normalnym).
Oznaczmy przez s
i
składowe tego wektora. Wektor ten możemy zapisać tak:
j
j
n
e
s r
r
=
σ
)
(
. (1)
Z postulatu współliniowości wektora
)
(n
σ
r
z wektorem
nr
wynika
n
n
r
r
σ
=
σ
)
(
, (2)
albo
j
j
n
e
n r
r
σ
=
σ
)
(
(3)
gdzie
σ
jest długością poszukiwanego wektora.
Porównajmy (1) z (3).
j
j
j
j
e
n
e
s
r
r
σ
=
, (4)
ale
a) przypadek ogólny, b) płaszczyzna główna.
2
i
ij
j
n
s
σ
=
(5)
Z (4) i (5) otrzymamy
j
i
ij
n
n
σ
=
σ
(6)
albo
(
)
0
=
δ
σ
−
σ
i
ij
ij
n
(7)
Jest to jednorodny układ liniowych równań algebraicznych, w którym niewiadomymi są
i
n
,
σ
(8)
Mamy zatem cztery niewiadome i trzy równania (7). Brakujące równanie wynika ze
znanej długości wektora
nr
(długość jednostkowa)
1
=
i
i
n
n
(9)
Warunkiem istnienia niezerowych rozwiązań układu (7) jest znikanie wyznacznika
(
)
0
det
=
δ
σ
−
σ
ij
ij
(10)
Rozpisanie tego warunku prowadzi do równania algebraicznego trzeciego rzędu na
poszukiwane
σ
.
0
3
2
2
1
3
=
−
σ
+
σ
−
σ
I
I
I
(11)
gdzie
(
)
( )
.
det
det
,
2
1
,
33
32
31
23
22
21
13
12
11
3
33
31
13
11
33
32
23
22
22
21
12
11
2
33
22
11
1
σ
σ
σ
σ
σ
σ
σ
σ
σ
=
σ
=
σ
σ
−
σ
σ
=
σ
σ
σ
σ
+
σ
σ
σ
σ
+
σ
σ
σ
σ
=
σ
+
σ
+
σ
=
σ
=
ij
ij
ij
mm
kk
ii
I
I
I
(12)
Jest to równanie wiekowe (sekularne) Laplace’a, a jego parametrami są niezmienniki
tensora naprężenia zdefiniowane poprzednio.
Równanie wiekowe ma zawsze trzy pierwiastki rzeczywiste
3
2
1
,
,
σ
σ
σ
. Nazywamy
je naprężeniami głównymi. Po uporządkowaniu tworzą trójkę uporządkowanych naprężeń
głównych:
III
II
I
σ
σ
σ
,
,
, przy czym
3
(
)
(
)
III
II
I
II
III
I
σ
≥
σ
≥
σ
=
σ
σ
σ
σ
=
σ
σ
σ
σ
=
σ
,
,
,
min
.
,
,
max
3
2
1
3
2
1
pośrednia
wartość
(13)
Wróćmy do równania (7) aby wyznaczyć kierunki odpowiadające kolejnym
naprężeniom głównym. Za
σ
podstawiamy kolejno
III
II
I
σ
σ
σ
,
,
i wyliczamy składowe
wektorów
)
(
)
(
)
(
,
,
III
II
I
n
n
n
r
r
r
. W przypadku poszukiwania kierunku
)
(I
nr
, układ (7)
przyjmie postać
(
)
0
)
(
=
δ
σ
−
σ
I
ij
I
ij
i
n
. (14)
Układ ten należy każdorazowo uzupełnić warunkiem (9).
Można pokazać, że osie główne tensora naprężenia opisane wektorami
)
(
)
(
)
(
,
,
III
II
I
n
n
n
r
r
r
są zawsze do siebie prostopadłe.
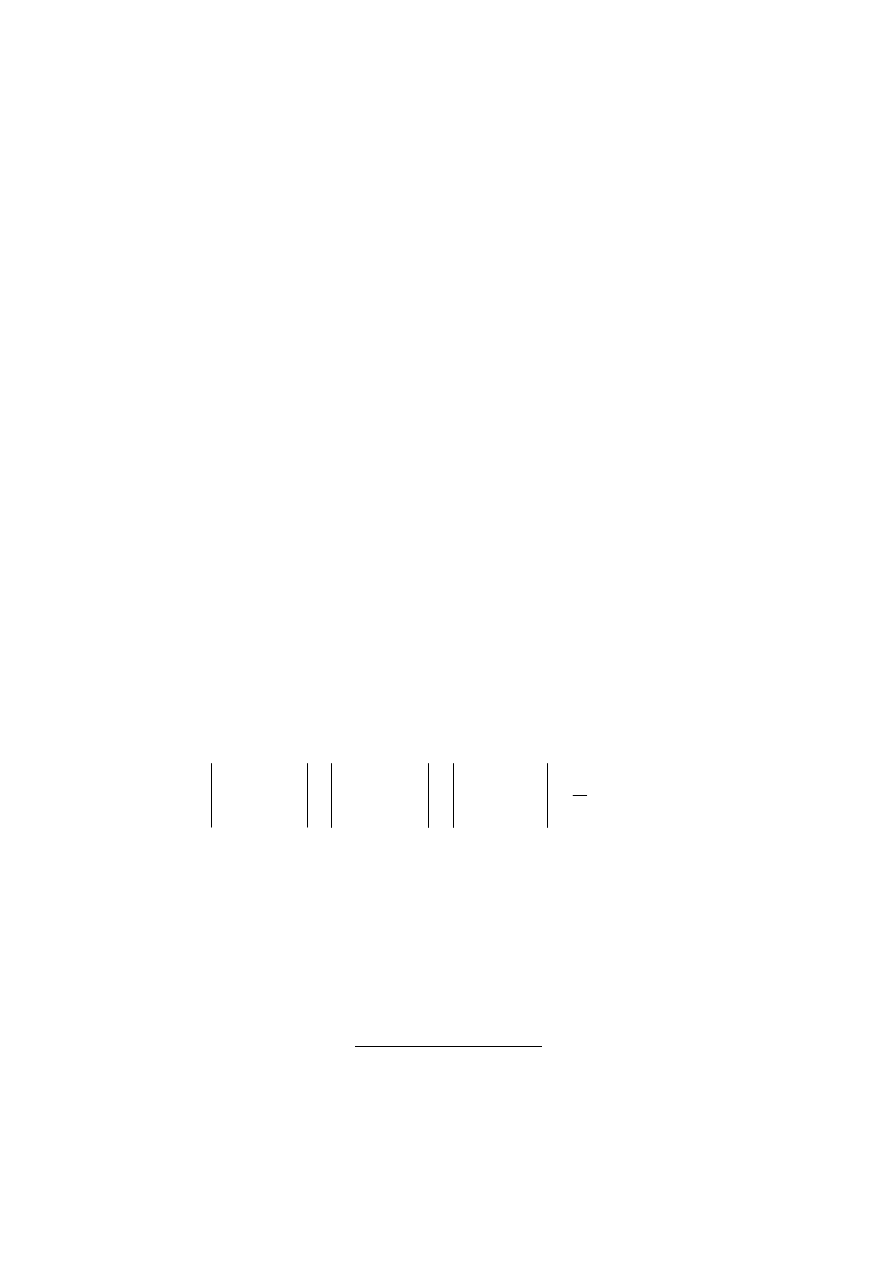
W ten sposób pokazaliśmy, że dowolny stan naprężenia zilustrowany na rys. a można
zawsze sprowadzić do stanu naprężenia odpowiadającego działaniu trzech naprężeń
normalnych na trzy wzajemnie prostopadłe płaszczyzny (por. rys b). Mówiąc obrazowo,
efekt ten można osiągnąć poprzez umiejętny obrót kostki sześciennej na ściankach której
uwidoczniono składowe stanu naprężenia. Na rysunkach pokazano jedynie naprężenia na
widocznych płaszczyznach. Na trzech niewidocznych występują naprężenia wynikające z
warunku równowagi myślowo wydzielonej kostki sześciennej.
a) b)

4
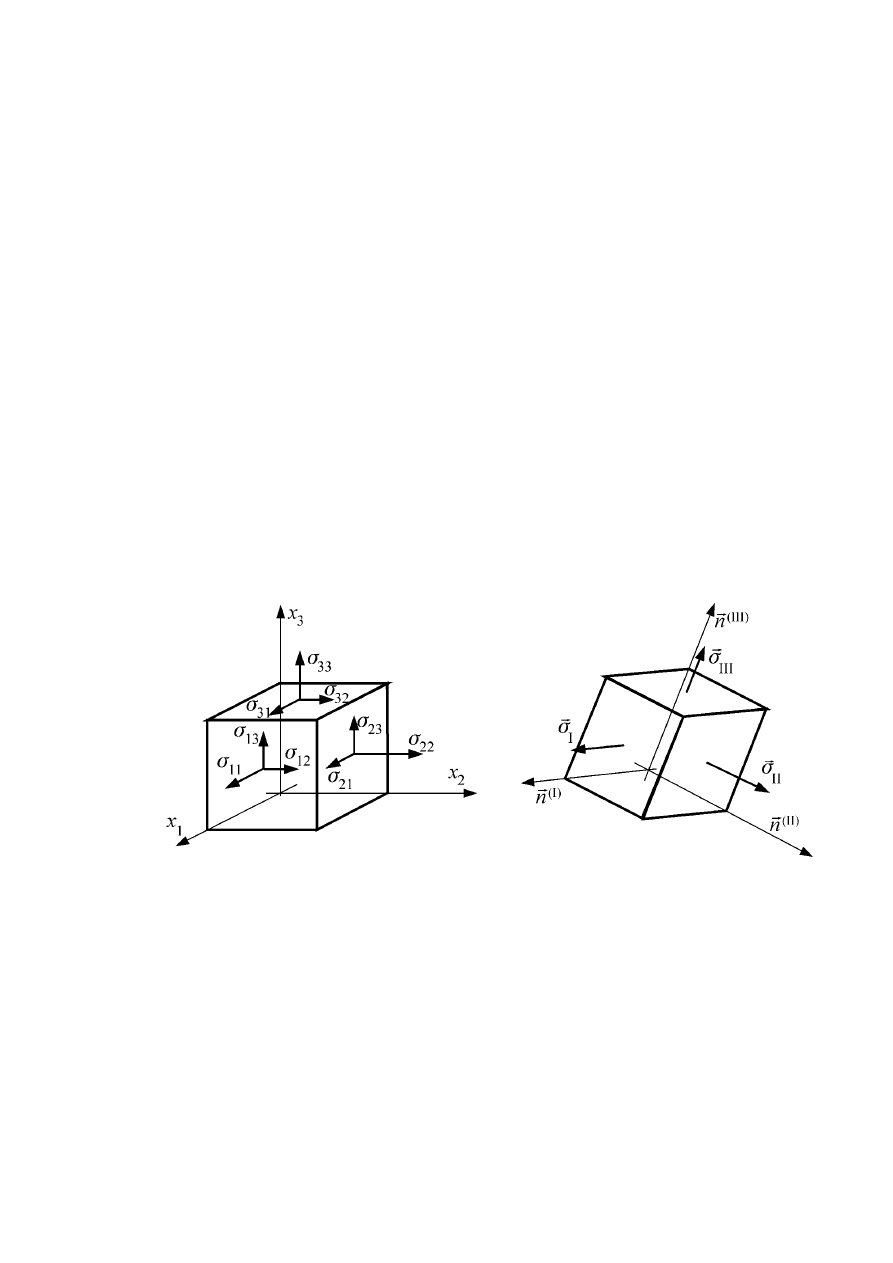
Koło Mohra
Jeżeli w danym punkcie ośrodka znane są naprężenia główne
III
II
I
σ
σ
σ
,
,
, to stan
naprężenia w tym punkcie panujący na płaszczyźnie dowolnie nachylonej do kierunków
głównych (por. rys.) można wyznaczyć za pomocą konstrukcji graficznej zwanej kołem
Mohra.
Niech wektor tworzy z osiami głównymi kąty
α
,
β
,
γ
odpowiednio. Mamy więc
.
1
,
cos
,
cos
,
cos
3
2
1
=
=
=
=
i
i
n
n
n
n
n
γ
β
α
(15)
Konstrukcja koła Mohra pokazanego na rys. przebiega następująco.
Na osi odciętych zaznaczamy trzy punkty M
1
, M
2
, M
3
odpowiadające wartościom
naprężeń głównych. Wykreślamy trzy okręgi oparte na odcinkach M
3
M
1
, M
3
M
2
, M
2
M
1
(por.
rysunek). Prowadzimy odcinek M
1
A pod kątem
α
oraz odcinek M
3
B pod kątem
γ
.
Zakreślamy łuki
C
A
O
→
:
3
i
C
B
O
→
:
2
. Punkt C odcina na osiach
σ
i
τ
, i są to
poszukiwane naprężenia.
Wnioski z konstrukcji koła Mohra.
1.
σ
Ι
jest największym, a
σ
ΙΙΙ
– najmniejszym ze wszystkich możliwych naprężeń
normalnych jakie mogą wystąpić w tym punkcie.
2.
Maksymalne naprężenia styczne występują na płaszczyznach nachylonych pod kątem
45
o
do kierunków głównych I i III. Wartości tych naprężeń są równe promieniowi
największego koła i wynoszą
2
max
III
I
σ
σ
τ
−
=
. (16)
Towarzyszą im naprężenia normalne
2
III
I
σ
σ
σ
+
=
. (17)
3. Możliwe stany naprężenia to tylko te z obszaru zaciemnionego.
5
6
Różniczkowe równania równowagi wewnętrznej.
Rozważmy równowagę sił działających na wydzieloną część ciała pozostającego w
równowadze. Na każdą jednostkę objętości ciała działa wektor sił objętościowych
i
i
e
X
X
r
r
=
. (18)
Wektorowy warunek równowagi wydzielonej części ciała zapiszemy tak
,
0
)
(
=
+
∫
∫
V
A
n
dV
X
dA
r
r
σ
(19)
,
0
=
+
∫
∫
V
j
j
A
j
j
dV
e
X
dA
e
s
r
r
(20)
ale
i
ij
j
n
s
σ
=
(21)
,
0
=
+
∫
∫
V
j
A
i
ij
j
dV
X
dA
n
e
σ
r
(22)
Twierdzenie Gaussa–Ostrogradzkiego
∫
∫
=
V
j
A
j
dV
F
dA
n
F
'
, (23)
pozwala zamienić całkę powierzchniową na całkę objętościową. Wykorzystamy je do
pierwszej całki.
Otrzymamy
,
0
'
=
+
∫
∫
V
j
V
i
ij
dV
X
dV
σ
(24)
7
czyli
.
0
'
=
+
j
i
ij
X
σ
(25)
Tak otrzymaliśmy różniczkowe równania równowagi wewnętrznej nazywane
równaniami Naviera.
Rozważmy teraz równanie równowagi momentów względem początku układu
współrzędnych. Wektorowy warunek równowagi momentowej wydzielonej części ciała
zapiszemy tak
,
0
)
(
=
×
+
×
∫
∫
V
A
n
dV
X
r
dA
r
r
r
r
r
σ
(26)
ale
k
j
i
ijk
e
b
a
e
b
a
r
r
r
=
×
,
(27)
gdzie e
ijk
jest symbolem permutacyjnym.
,
0
=
+
∫
∫
V
k
j
i
ijk
A
k
j
i
ijk
dV
e
X
x
e
dA
e
s
x
e
r
r
(28)
ale
m
mj
j
n
s
σ
=
(29)
,
0
=
+
∫
∫
V
j
i
A
m
mj
i
k
ijk
dV
X
x
dA
n
x
e
e
σ
r
(30)
Pierwszą całkę zamienimy na całkę objętościową korzystając z twierdzenie Gaussa–
Ostrogradzkiego. Otrzymamy
(
)
,
0
'
=
+
∫
∫
V
j
i
A
m
mj
i
k
ijk
dV
X
x
dV
x
e
e
σ
r
(33)
Po dalszych przekształceniach otrzymamy
,
0
'
=
+
+
∫
∫
∫
V
V
V
j
i
m
mj
i
mj
im
k
ijk
dV
X
x
dV
x
dV
e
e
σ
σ
δ
r
(32)
Na mocy równań Naviera (25) wyrazy podkreślone znikają. Pozostaje zatem
,
0
=
ij
ijk
e
σ
(33)

8
Otrzymaliśmy tzw. warunki Cauchy’ego, które muszą być spełnione przez składowe
tensora naprężenia. Wynika z nich symetria tensora naprężenia
ji
ij
σ
σ
=
(34)
Naprężeniowe warunki brzegowe
Jeśli rozważymy równowagę czworościanu przyległego do powierzchni zewnętrznej
ciała, na którą działają rozłożone obciążenia powierzchniowe, to zamiast związku
i
ij
j
n
s
σ
=
(35)
otrzymamy
i
ij
j
n
p
σ
=
(36)
Tą zależnością związane są składowe wektora powierzchniowych obciążeń
zewnętrznych ze składowymi tensora naprężenia w dowolnym punkcie powierzchni
zewnętrznej rozpatrywanego ciała.

9
Przykład
Stan naprężenia w pewnym ciele jest opisany w sposób następujący
.
3
33
32
23
31
13
2
2
21
12
2
1
11
1
11
,
0
,
2
3
,
6
,
2
1
x
C
x
b
x
a
x
x
a
x
b
−
=
σ
=
σ
=
σ
=
σ
=
σ
−
−
=
σ
=
σ
=
σ
=
σ
Sprawdzić równania Naviera jeśli wiadomo, że
C
X
X
X
=
=
=
3
2
1
,
0
Rozpiszmy równania Naviera:
0
,
=
+
σ
j
i
ij
X
.
Pierwsze równanie:
0
1
3
'
31
2
'
21
1
'
11
=
+
σ
+
σ
+
σ
X
.
Po podstawieniu
0
0
2
2
=
+
−
b
b
– jest spełnione.
Kolejne równania
0
2
3
'
32
2
'
22
1
'
12
=
+
σ
+
σ
+
σ
X
.
0
0
6
6
1
1
=
+
+
−
x
a
x
a
– jest spełnione,
0
3
3
'
33
2
'
23
1
'
13
=
+
σ
+
σ
+
σ
X
.
0
=
+
−
C
C
– też jest spełnione.
Wyszukiwarka
Podobne podstrony:
Kolo zebate id 237314 Nieznany
kolo zaoczni id 240111 Nieznany
kolo 1 doc id 237073 Nieznany
kolo wodne id 237347 Nieznany
kolo zdaniowe id 240044 Nieznany
4 kolo rozowe id 37673 Nieznany
kolo so id 240007 Nieznany
kolo z miernictwa id 240039 Nieznany
geometria kolo szyna id 189562 Nieznany
historyczna kolo II id 204904 Nieznany
KOLO 2beta id 239759 Nieznany
Kolo 1 teoria id 237085 Nieznany
kolo zawal id 237334 Nieznany
Kolo TR 1 id 237305 Nieznany
kolo proba id 237284 Nieznany
Bazy danych kolo 2 1 id 81756 Nieznany
biochemia kolo id 86264 Nieznany (2)
hih kolo kolo2 07 id 709394 Nieznany
kolo i tpl pytania 717 id 23719 Nieznany
więcej podobnych podstron