1
IDENTYFIKACJA W OPARCIU O POMIAR CHARAKTERYSTYK W DZIEDZINIE
CZASU LUB CZĘSTOTLIWOŚCI
Znaczna grupa metod identyfikacji opiera się na wyznaczeniu charakterystyk
identyfikowanych obiektów w dziedzinie czasu lub częstotliwości. Wykorzystuje się tutaj
w szczególności charakterystyki impulsowe, skokowe lub częstotliwościowe.
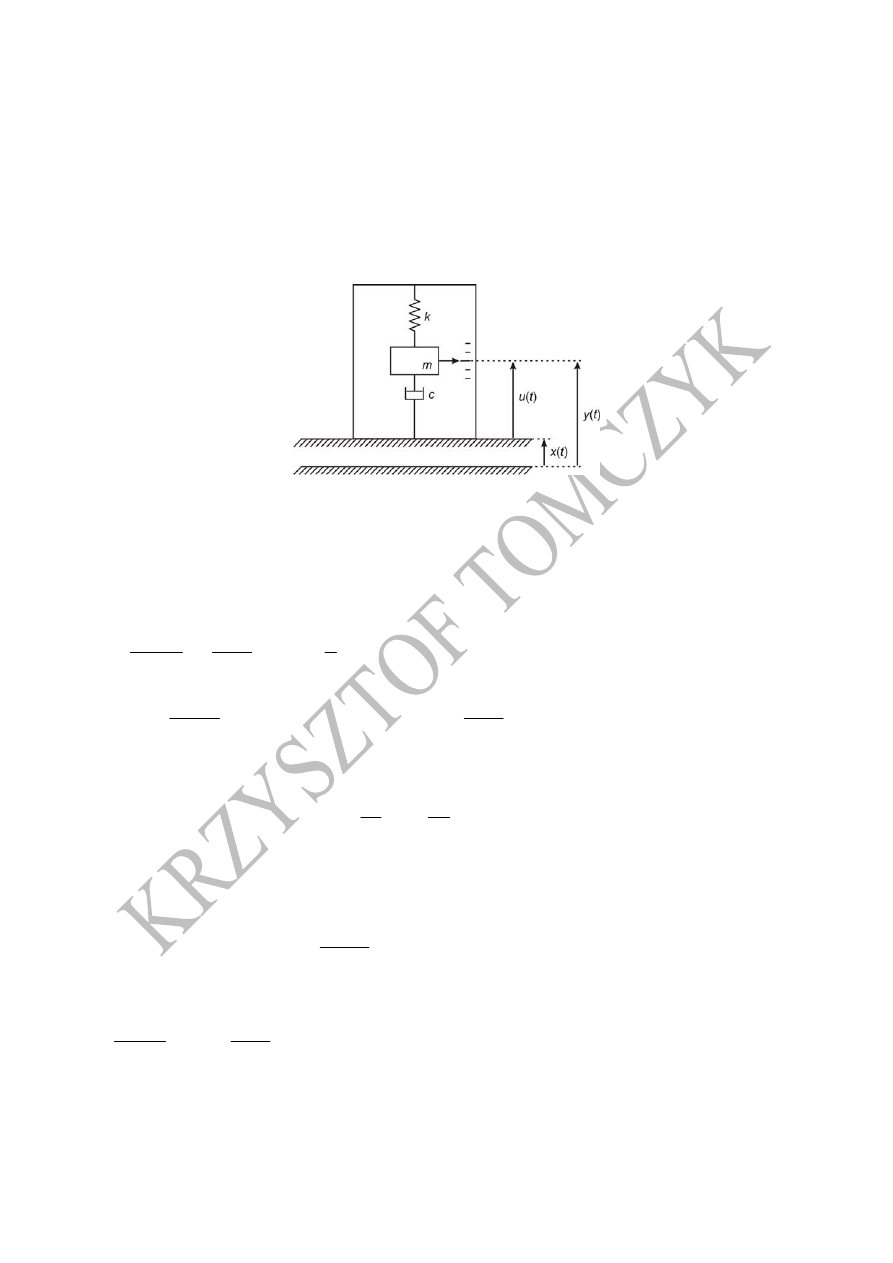
1. Układ 2-go rzędu
Rys 1. Mikromechanivzny model układu 2-go rzędu
Równanie ruchu przedstawionego na powyższym Rysunku układu można opisać za pomocą
równania różniczkowego 2-go rzędu, wykorzystując w tym celu równanie momentów. Mamy
zatem
)
(
)
(
)
(
)
(
t
x
k
t
ku
dt
t
du
c
dt
t
y
d
m
1
=
+
+
2
2
(1)
gdzie
2
2
dt
t
y
d
m
)
(
jest momentem bezwładności,
dt
t
du
c
)
(
jest momentem tłumiącym,
)
(t
ku
jest
momentem sprężystości,
)
(t
u
jest względnym przesunięciem masy,
)
(t
y
jest bezwzględnym
przesunięciem masy i
]
[kg
m
,
⎥⎦
⎤
⎢⎣
⎡
s
kg
c
,
⎥
⎦
⎤
⎢
⎣
⎡
2
s
kg
k
są odpowiednio: masą, współczynnikiem
tłumienia lepkiego i stałą sprężyny.
W przypadku pomiaru przyspieszenia wielkością wejściową jest druga pochodna
bezwzględnego przesunięcia
2
2
dt
t
x
d
)
(
, a wyjściem jest bezwzględne przesunięcie masy
)
(t
y
,
Z (1) wynika
)
(
)
(
)
(
)
(
t
x
a
t
u
dt
t
du
dt
t
u
d
2
0
0
2
2
=
+
2
+
ω
βω
(2)
gdzie:
)
(t
x
- sygnał wejściowy
2
)
(t
u
- sygnał wyjściowy
a
- współczynnik wzmocnienia statycznego
β
- współczynnik tłumienia
0
ω
- pulsacja drgań własnych nietłumionych oraz
2
0
=
ω
m
k
,
β
2
=
m
k
c
,
k
a
1
=
(3)
Wykonując operację transformaty Laplace’a na (2) mamy
)
(
)
(
)
(
)
(
s
X
a
s
U
s
sU
s
U
s
2
0
0
2
=
+
2
+
ω
βω
(4)
i w efekcie
2
0
0
2
2
0
+
2
+
=
=
ω
βω
ω
s
s
a
s
X
s
Y
s
K
)
(
)
(
)
(
(5)
Dla
1
≤
<
0
β
bieguny transmitancji (5), czyli pierwiastki równania:
0
=
+
2
+
=
2
0
0
2
ω
βω
s
s
s
M
)
(
(6)
wynoszą
2
0
0
∗
2
0
0
−
1
−
−
=
−
1
+
−
=
β
ω
βω
β
ω
βω
i
p
i
p
(7)
Transmitancja widmowa
)
(
)
(
)
(
)
(
)
(
)
(
ω
ϕ
ω
ω
ω
ω
ω
β
ω
ω
βωω
ω
ω
ω
ω
i
e
A
iQ
P
i
a
i
a
i
K
=
+
=
=
2
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
1
=
2
+
−
=
0
2
0
0
2
2
0
2
0
(8)
gdzie
)
(
ω
A
- charakterystyka wzmocnienia (magnitude characteristic)
)
(
ω
ϕ
- charakterystyka przesunięcia fazowego systemu (phase delay characteristic of system)
2
0
2
2
2
0
2
2
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
4
+
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
1
=
+
=
=
ω
ω
β
ω
ω
ω
ω
ω
ω
a
Q
P
i
K
A
)
(
)
(
)
(
)
(
(9)
3
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
1
2
−
=
2
0
0
ω
ω
ω
ω
β
ω
φ
arctg
)
(
(10)
Dla ),
(
ω
i
K
0
ω oraz
β
zachodzą następujące relacje:
(
)
0
2
2
0
2
0
0
2
0
2
0
0
2
0
2
2
0
0
2
0
0
0
2
2
0
2
0
2
2
2
0
0
2
0
0
0
2
0
0
2
0
0
0
∗
0
2
+
−
=
−
2
−
−
1
=
−
⎟
⎠
⎞
⎜
⎝
⎛
−
1
−
−
−
1
+
−
−
1
=
=
−
1
+
−
+
−
1
+
−
+
−
1
−
−
−
1
=
=
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
−
1
−
−
−
1
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
−
1
+
−
−
1
=
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
1
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
1
=
βωω
ω
ω
ω
ω
ω
βω
ω
ω
ω
β
ω
βω
β
ω
βω
ω
β
ω
ω
β
ω
β
ω
βω
ω
β
ω
βω
ω
β
ω
βω
ω
β
ω
βω
ω
ω
ω
ω
i
K
i
K
i
i
i
K
i
i
i
i
H
i
i
i
i
K
p
i
p
i
K
i
K
)
(
)
(
)
(
(11)
)
(
2
2
0
2
0
2
−
1
+
=
β
ω
ω
β
p
=
0
2
0
2
2
0
2
0
2
=
−
+
ω
ω
β
ω
ω
β
(12)
β
ω
βω
=
=
−
0
0
p
p)
Re(
(13)
gdzie
(
)
a
i
K
K
=
0
=
=
0
ω
(14)
Dla układu (1) pulsacja drgań własnych tłumionych
n
ω
oraz szczyt rezonansowy
r
M
wynoszą:
2
0
−
1
=
β
ω
ω
n
(15)
2
−
1
2
=
β
β
a
M
r
(16)
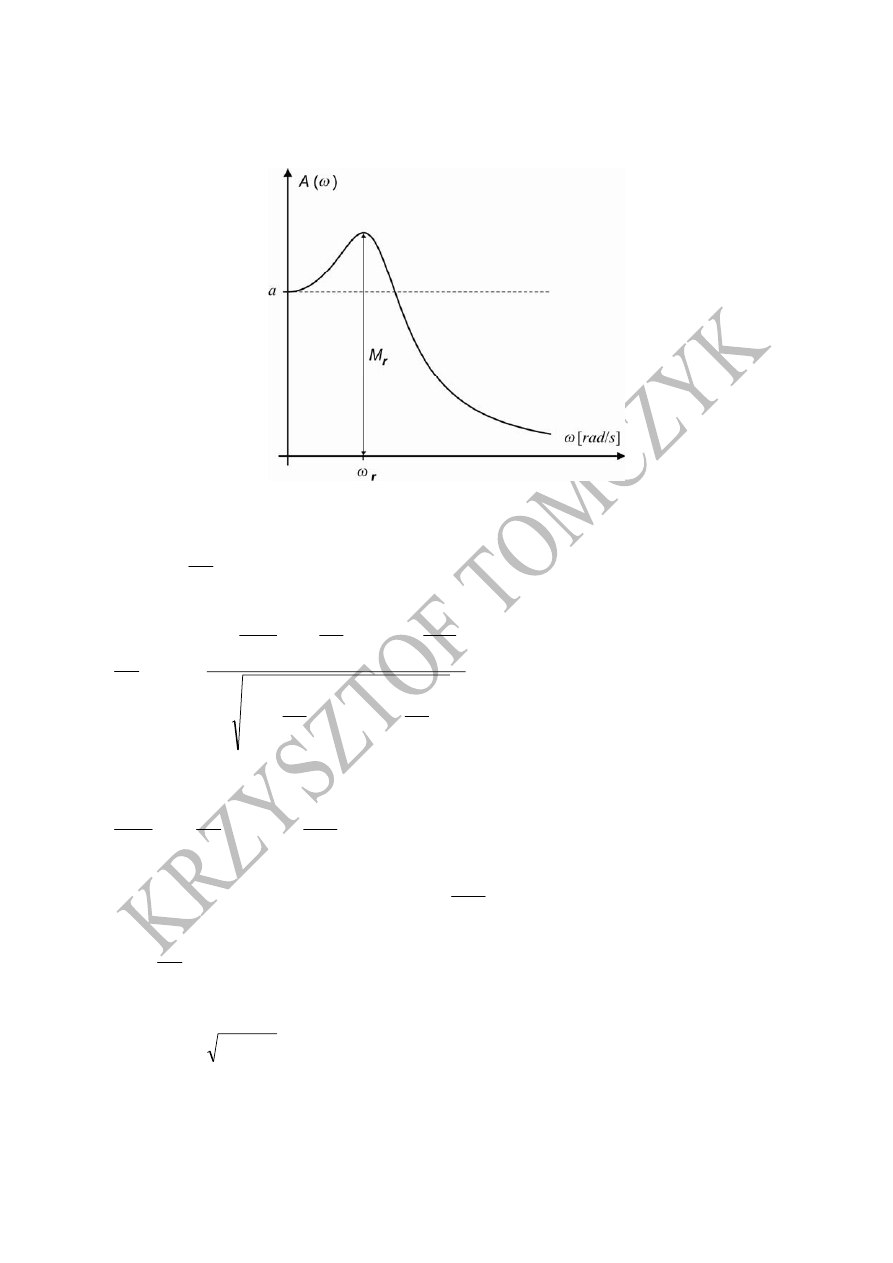
4
Rysunek 2 przedstawia charakterystykę amplitudowo-częstotliwościową układu
oscylacyjnego 2 rzędu.
Rys. 2. Charakterystyka amplitudowo-częstotliwościowa układu oscylacyjnego 2 rzędu
Wzór określający pulsację rezonansową
r
ω wyprowadza się poprzez przyrównanie
pochodnej
[
]
)
(
ω
ω
A
d
d
do zera
[
]
0
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
4
+
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
1
2
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
8
+
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
1
4
−
−
=
3
2
0
2
2
2
0
2
0
2
2
0
2
0
ω
ω
β
ω
ω
ω
ω
β
ω
ω
ω
ω
ω
ω
a
A
d
d
)
(
(17)
Wtedy
0
=
8
+
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
1
4
−
2
0
2
2
0
2
0
ω
ω
β
ω
ω
ω
ω
(18)
Mnożąc powyższe równanie obustronnie przez
ω
ω
4
2
0
otrzymujemy
0
=
2
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
1
−
2
2
0
β
ω
ω
(19)
i w efekcie
2
0
2
−
1
=
=
β
ω
ω
ω
r
(20)
5
Wyznaczenie odpowiedzi impulsowej
)
(t
k
metodą residuów
(
)
)
(
lim
)
(
s
K
p
s
s
K
res
i
i
p
s
i
p
s
−
=
→
=
∑
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
1
=
=
n
i
t
i
p
i
p
s
e
s
K
res
t
y
)
(
)
(
(21)
Bieguny transmitancji (5) opisuje (7). Zgodnie z (21) mamy
(
)
2
0
2
0
2
0
=
∗
2
0
∗
2
0
→
=
−
1
2
−
=
−
1
2
=
−
=
−
−
−
=
β
ω
β
ω
ω
ω
ω
ia
i
a
p
s
a
p
s
p
s
a
p
s
s
K
res
p
s
p
s
p
s
)
(
)
)(
(
lim
)
(
(22)
(
)
2
0
2
0
2
0
∗
=
2
0
∗
2
0
∗
∗
→
∗
=
−
1
2
=
=
−
1
2
−
=
−
=
−
−
−
=
β
ω
β
ω
ω
ω
ω
ia
i
a
p
s
a
p
s
p
s
a
p
s
s
K
res
p
s
p
s
p
s
)
(
)
)(
(
lim
)
(
(23)
oraz
t
i
t
t
i
t
e
e
ia
e
e
ia
t
k
2
−
1
0
−
0
−
2
0
2
−
1
0
0
−
2
0
−
1
2
+
−
1
2
−
=
β
ω
βω
β
ω
βω
β
ω
β
ω
)
(
(24)
Wykorzystując relacje
x
i
x
e
x
i
x
e
ix
ix
sin
cos
sin
cos
−
=
+
=
−
(25)
mamy
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
−
1
−
⎟
⎠
⎞
⎜
⎝
⎛
−
1
+
+
⎟
⎠
⎞
⎜
⎝
⎛
−
1
−
⎟
⎠
⎞
⎜
⎝
⎛
−
1
−
−
1
2
=
2
0
2
0
2
0
2
0
0
−
2
0
t
i
t
t
i
t
e
ia
t
k
t
β
ω
β
ω
β
ω
β
ω
β
ω
βω
sin
cos
sin
cos
)
(
(26)
Z (2.26) wynika
⎟
⎠
⎞
⎜
⎝
⎛
−
1
−
1
2
=
⎟
⎠
⎞
⎜
⎝
⎛
−
1
2
−
1
2
−
=
2
0
0
−
2
0
2
0
0
−
2
0
t
e
a
t
i
e
ia
t
k
t
t
β
ω
β
ω
β
ω
β
ω
βω
βω
sin
sin
)
(
(27)
W rezultacie mamy
( )
t
e
a
t
k
n
t
ω
β
ω
βω
sin
)
(
0
−
2
0
−
1
=
(28)
Z kolei odpowiedź skokową opisuje równanie
6
( )
( )
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
−
1
=
∫
=
0
0
−
0
t
t
e
a
d
k
t
h
n
n
n
t
t
ω
ω
β
ω
ω
τ
τ
βω
sin
cos
)
(
)
(
(29)
Drgania (29) są tłumione wykładniczo z wykładnikiem
a
t
t
h
+
⋅
⋅
−
±
=
0
1
)
exp(
)
(
ω
β
(30)
stanowiącym asymptoty dla przebiegu oscylacyjnego.
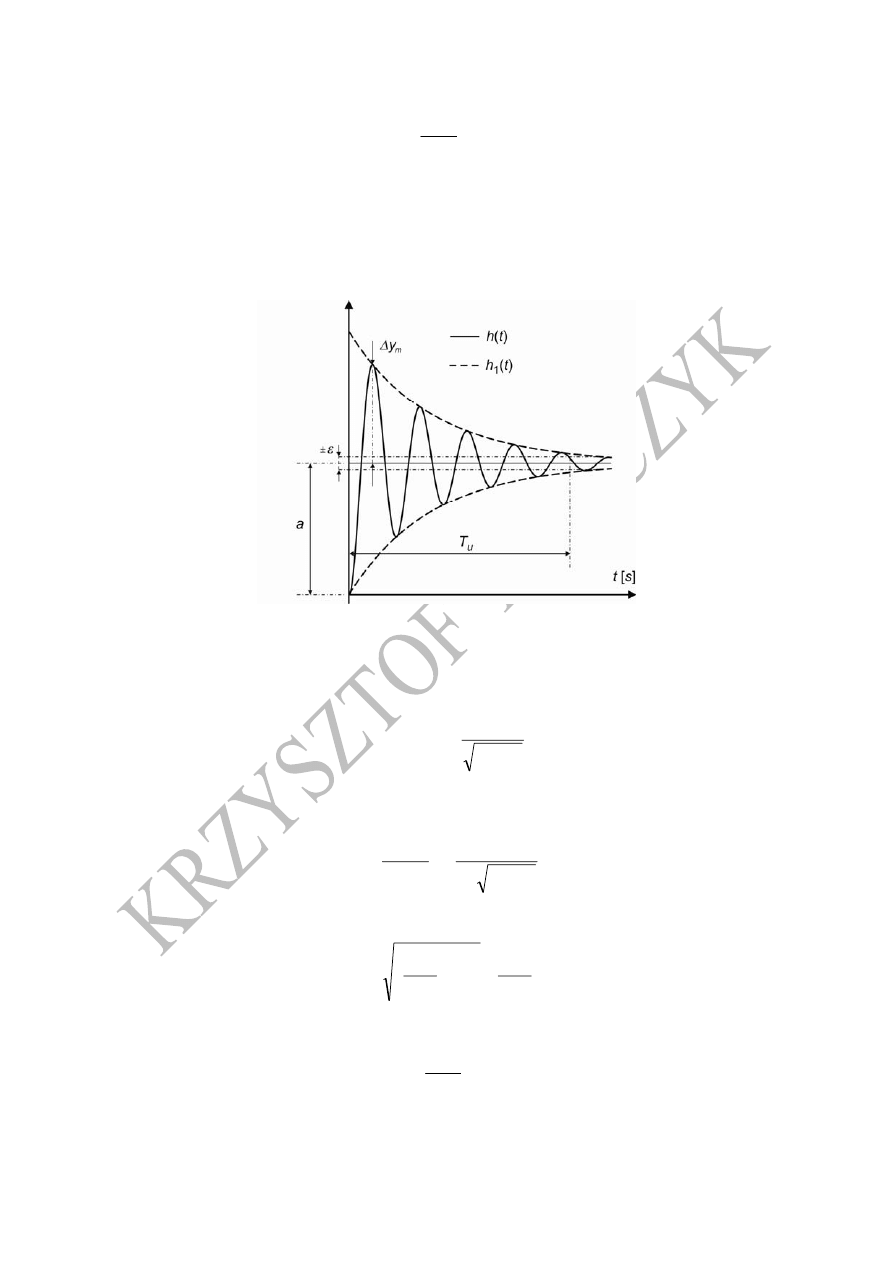
Rysunek 3 przedstawia odpowiedź skokową(29) układu (5).
Rys. 3. Odpowiedź skokowa układu oscylacyjnego 2 rzędu
Wartość współczynnika wzmocnienia odpowiada stanowi ustalonemu h(t).
Maksymalne odchylenie od stanu ustalonego odpowiedzi skokowej przedstawia (31).
m
y
∆
=
⎜⎜
⎜
⎝
⎛
⎟⎟
⎟
⎠
⎞
−
1
⋅
−
⋅
2
β
β
π
exp
a
(31)
Czas ustalania się wskazań, w którym przebieg h(t) odchyla się od swojego stanu ustalonego
o więcej niż
ε
± , określa (32).
u
T =
2
0
−
1
⋅
⋅
⋅
1
β
ε
ω
β
a
ln
(32)
Ze wzoru (31) wynika następująca zależność opisująca
β
β
=
α
π
α
π
⋅
2
−
1
+
⎜⎜
⎝
⎛
⎟
⎠
⎞
⋅
2
2
(33)
gdzie
⎜
⎜
⎝
⎛
⎟⎟
⎠
⎞
∆
=
m
y
a
ln
α
(34)
Dla przypadku odpowiedzi impulsowej współczynnik tłumienia wynosi
7
β
=
2
0
2
2
0
ln
4
ln
⎜
⎜
⎝
⎛
⎟⎟
⎠
⎞
+
⋅
⋅
n
n
A
A
n
A
A
π
(35)
i wyznacza się go na podstawie stosunku kolejnych amplitud
n
A odpowiedzi oscylacyjnej.
Ze wzoru (35) wynika pulsacja drgań własnych nietłumionych
0
ω
0
ω
=
u
T
a
⋅
−
1
⋅
2
β
β
ε
ln
(36)
Po wstawieniu (35) i (36) w (4) i (5) otrzymujemy szukany matematyczny model.
2. Przykład syntezy matematycznego modelu inercyjnego 1 rzędu w oparciu o pomiar
odpowiedzi skokowej
Transmitancja układu 1-go rzędu z opóźnieniem
)
(
)
(
s
X
s
Y
=
τ
s
e
T
s
k
−
⋅
+
1
(37)
Odpowiedź skokowa
τ
+
⎥
⎦
⎤
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛ −
−
1
=
T
t
k
t
h
exp
)
(
(38)
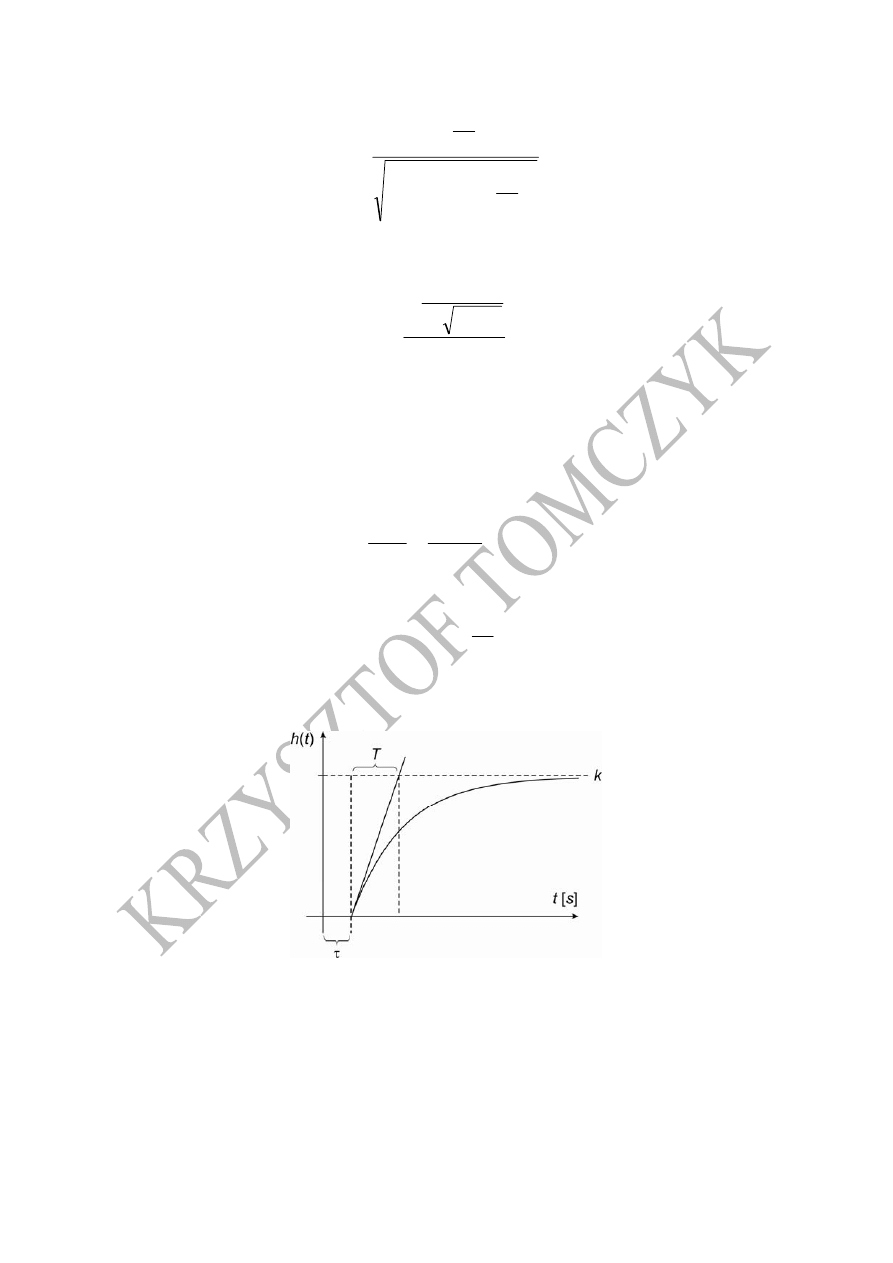
Rysunek 4 przedstawia odpowiedź skokową (38) układu (37).
Rys. 4. Odpowiedź skokowa układu 1 rzędu z opóźnieniem
Wyszukiwarka
Podobne podstrony:
LAB 2 identyfikacja id 257786 Nieznany
3 Identyfikacja id 33700 Nieznany (2)
Identyfikacja procesow id 20935 Nieznany
identyfikacja zwlok id 209373 Nieznany
identyfikacja argumentow id 209 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
więcej podobnych podstron