
KUKA Roboter mit Lineareinheiten
Transformationen – MADA Konfigurationen
KUKA Headquarters, 14/02/03
Maik Arnzen, R-PM
www.kuka-robotics.com
KUKA Roboter mit Lineareinheiten
KUKA Roboter GmbH
|
R-PM
|
Maik Arnzen
|
31.01.2014
|
Seite 3
Introduction
Overview
Detailing
Outlook
Summary
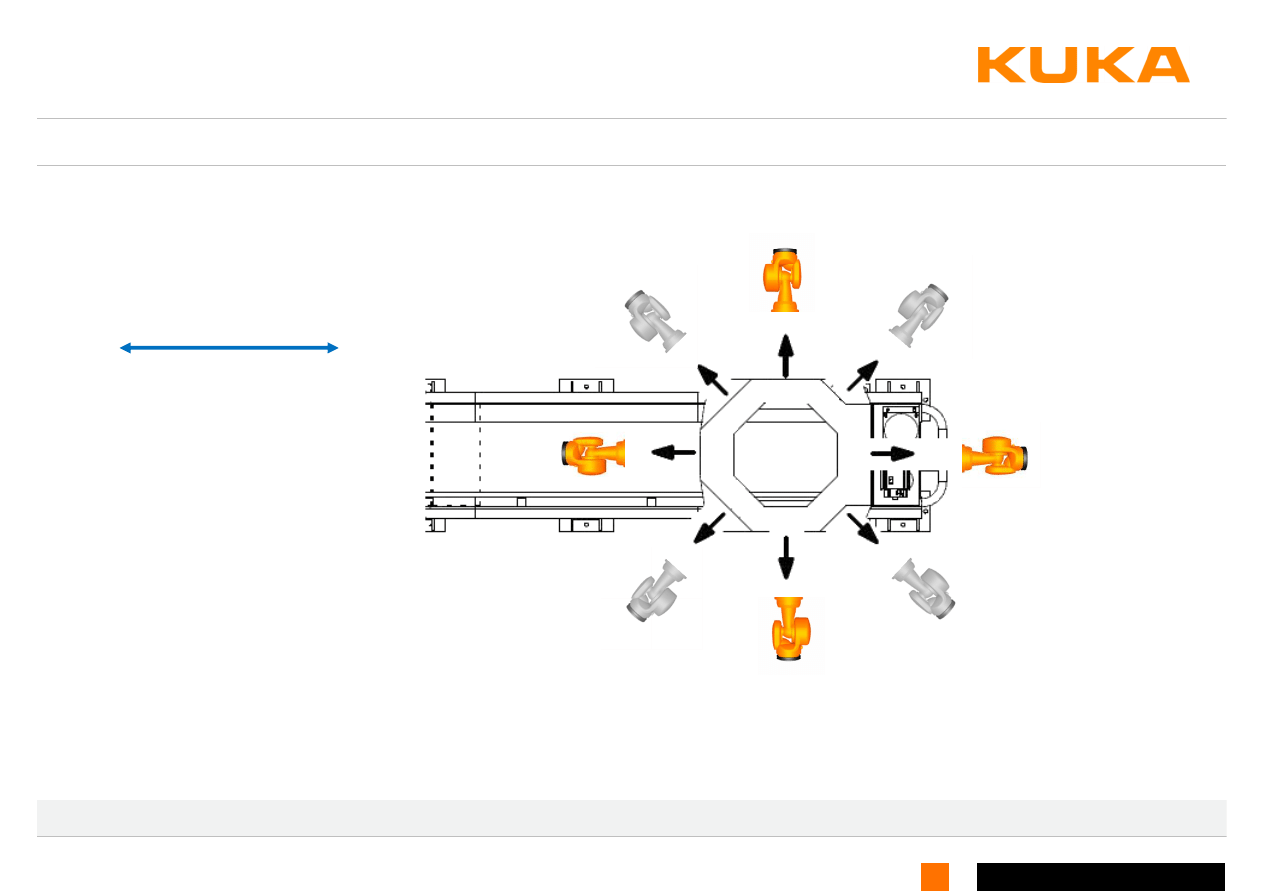
Robotermontagevarianten auf der KUKA KL?
Standard / gespiegelt
C
A
B
D
A - 45°- B
B - 45°- C
C - 45°- D
D - 45°- A
KL-Richtung*
-
+
* Die Hauptverfahrichtung der KL ist die negative Richtung!
www.kuka-robotics.com
KUKA Roboter mit Lineareinheiten
KUKA Roboter GmbH
|
R-PM
|
Maik Arnzen
|
31.01.2014
|
Seite 4
Introduction
Overview
Detailing
Outlook
Summary
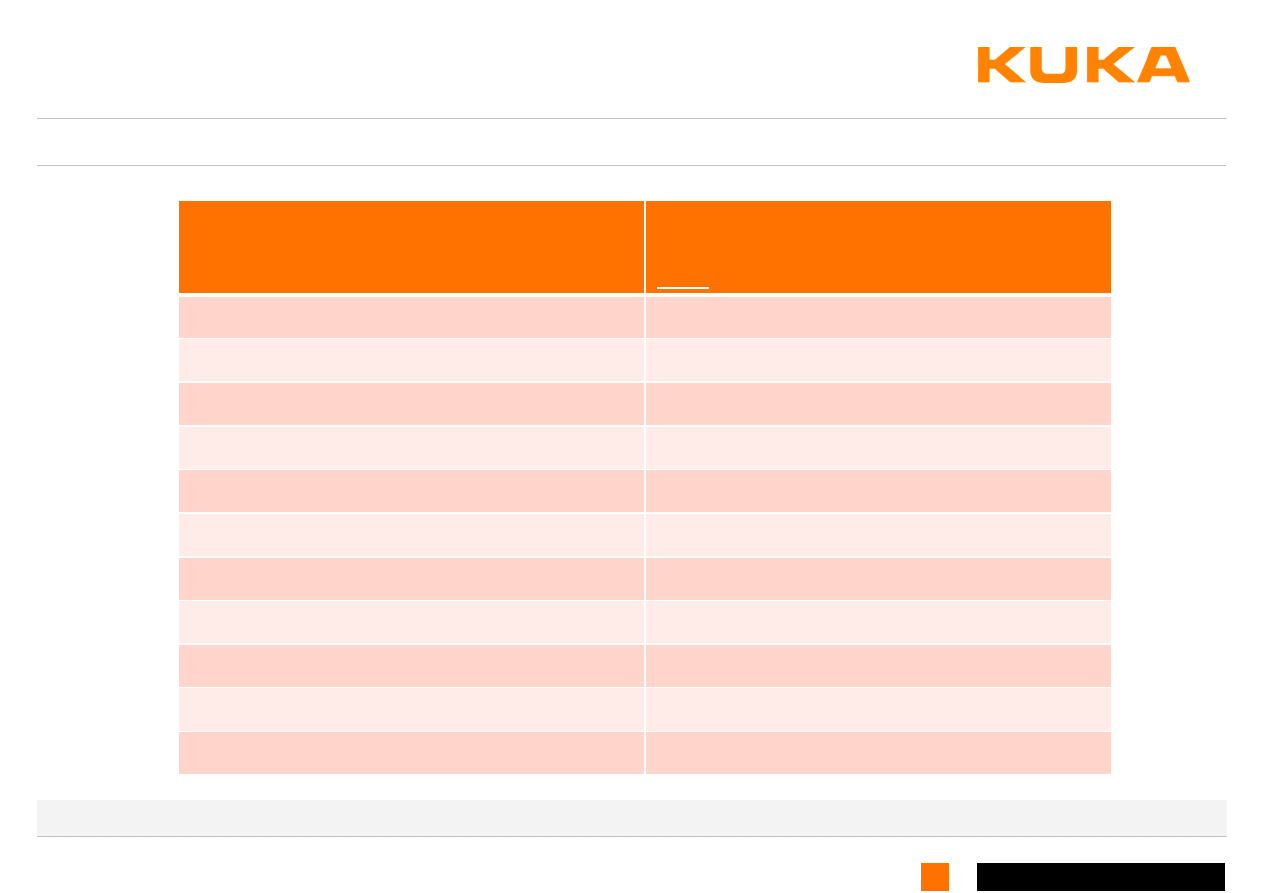
Höhenangaben für die KL-Varianten ab der KSS/VSS 8.2, KSS 8.3?
KL – KUKA Lineareinheit
Höhe Z in [mm]
(Abmaß: Fussboden bis Montageflanch der KL
ohne Aufbaugestell)
KL 250-3
387
KL 250-3 CV, hohe Variante
801
KL 250-3 CV, niedrige Variante
551
KL 1000-2
480
KL 1000-2 CV, hohe Variante
853
KL 1000-2 CV, niedrige Variante
518
KL 1500-3
507
KL 1500-3 CV, hohe Variante
853
KL 1500-3 CV, niedrige Variante
568
KL 2000
557
KL 3000
915
www.kuka-robotics.com
KUKA Roboter mit Lineareinheiten
KUKA Roboter GmbH
|
R-PM
|
Maik Arnzen
|
31.01.2014
|
Seite 5
Introduction
Overview
Detailing
Outlook
Summary
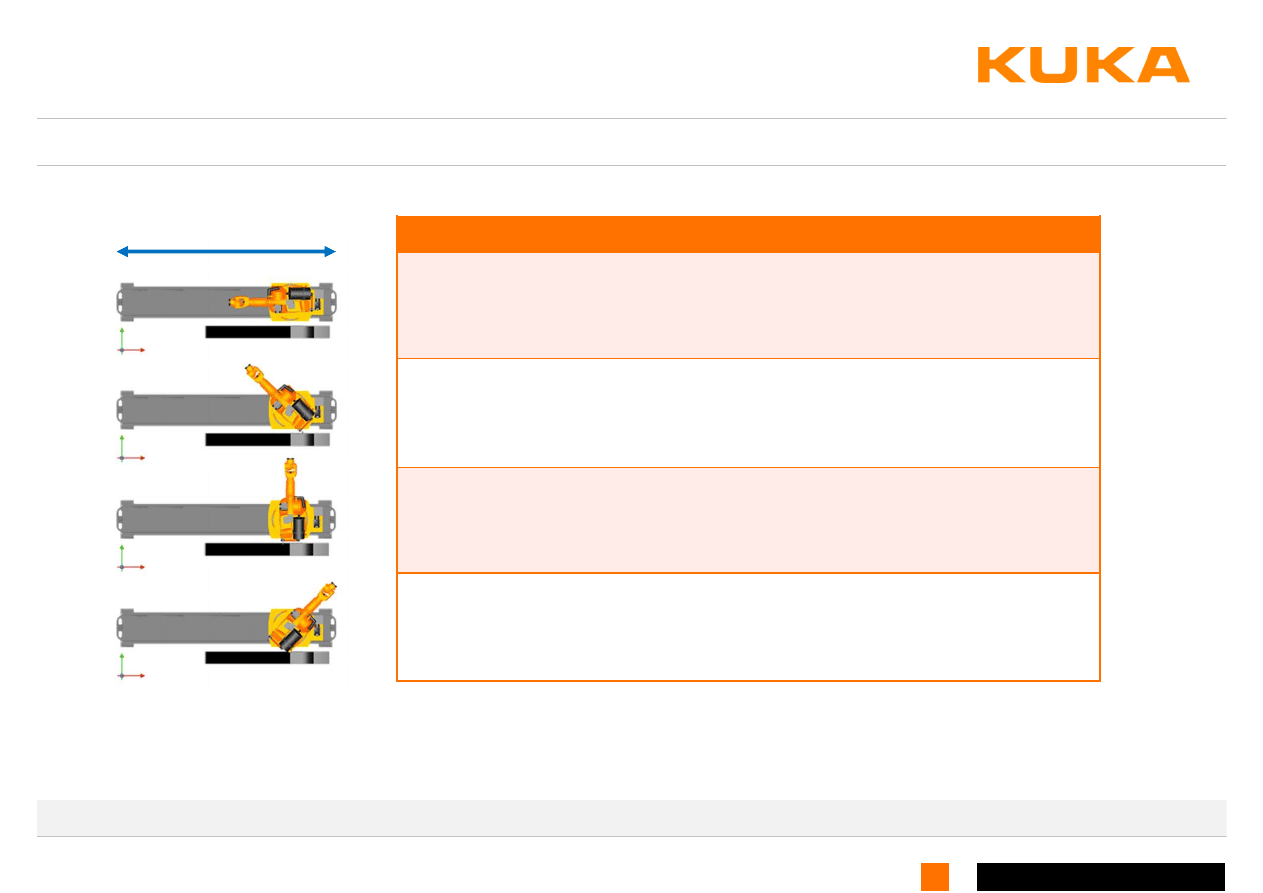
KL Standard / Bodenmontage – Transformation?
KL-Richtung
-
+
$RAT_MOT_AX[7]
N positiver Wert
$ET1_TA1KR = {X 0.0, Y 0.0,
Z Tabelle
, A 0.0,
B -90.0
, C 0.0}
$ET1_TFLA3
= {X 0.0, Y 0.0, Z 0.0
, A -90.0
,
B 90.0
,
C -90.0
}
$ET1_TA1KR = {X 0.0, Y 0.0,
Z Tabelle
, A 0.0,
B -90.0
, C 0.0}
$ET1_TFLA3 = {X 0.0, Y 0.0, Z 0.0
, A -90.0
,
B 45.0
,
C -90.0
}
$ET1_TA1KR = {X 0.0, Y 0.0,
Z Tabelle
, A 0.0,
B -90.0
, C 0.0}
$ET1_TFLA3 = {X 0.0, Y 0.0, Z 0.0
, A -90.0
,
B 0.0
,
C -90.0
}
$ET1_TA1KR = {X 0.0, Y 0.0,
Z Tabelle
, A 0.0,
B -90.0
, C 0.0}
$ET1_TFLA3 = {X 0.0, Y 0.0, Z 0.0
, A -90.0
,
B -45.0
,
C -90.0
}
www.kuka-robotics.com
KUKA Roboter mit Lineareinheiten
KUKA Roboter GmbH
|
R-PM
|
Maik Arnzen
|
31.01.2014
|
Seite 6
Introduction
Overview
Detailing
Outlook
Summary
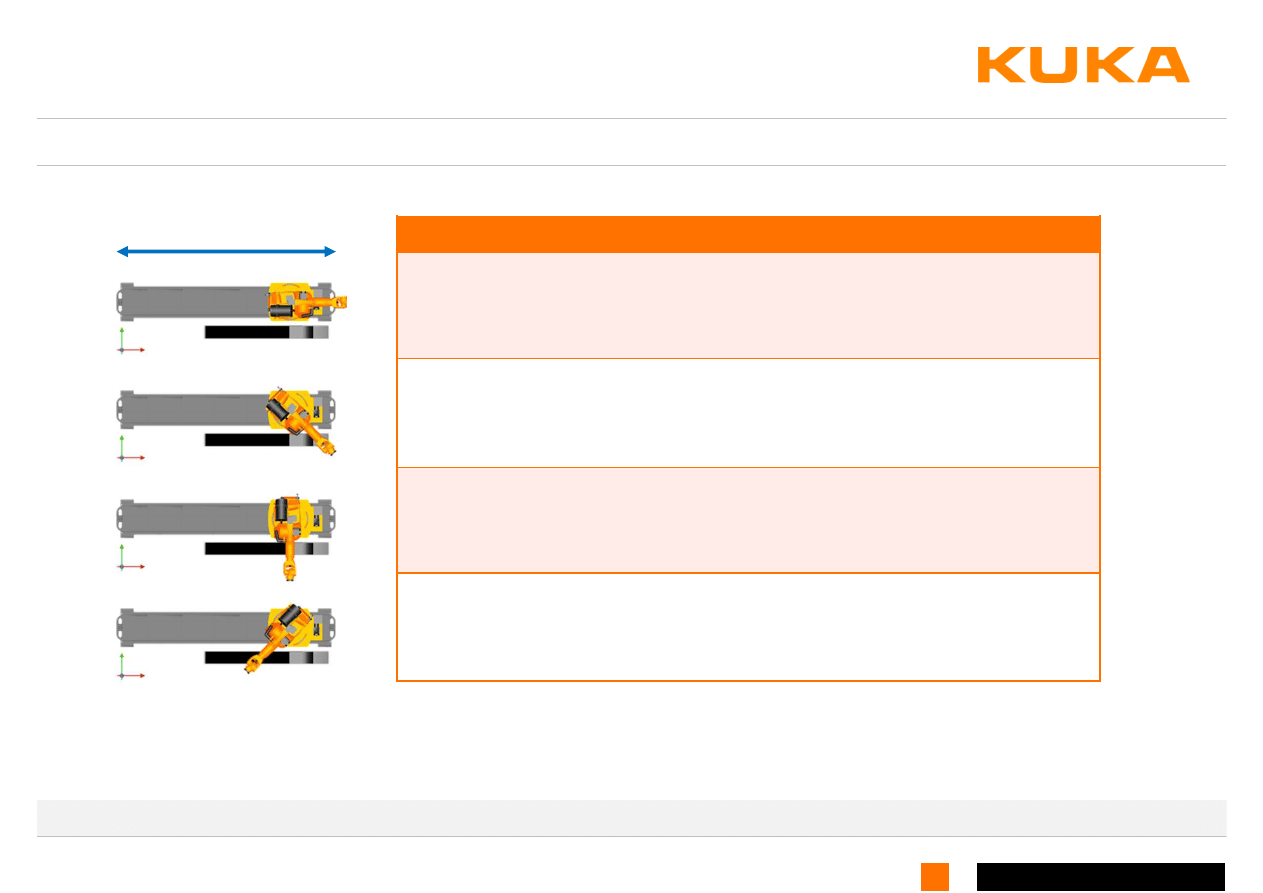
KL Standard / Bodenmontage – Transformation?
$RAT_MOT_AX[7]
N positiver Wert
$ET1_TA1KR = {X 0.0, Y 0.0,
Z Tabelle
, A 0.0,
B -90.0
, C 0.0}
$ET1_TFLA3
= {X 0.0, Y 0.0, Z 0.0
, A -90.0
,
B -90.0
,
C -90.0
}
$ET1_TA1KR = {X 0.0, Y 0.0,
Z Tabelle
, A 0.0,
B -90.0
, C 0.0}
$ET1_TFLA3 = {X 0.0, Y 0.0, Z 0.0
, A -90.0
,
B -135.0
,
C -90.0
}
$ET1_TA1KR = {X 0.0, Y 0.0,
Z Tabelle
, A 0.0,
B -90.0
, C 0.0}
$ET1_TFLA3 = {X 0.0, Y 0.0, Z 0.0
, A -90.0
,
B 180.0
,
C -90.0
}
$ET1_TA1KR = {X 0.0, Y 0.0,
Z Tabelle
, A 0.0,
B -90.0
, C 0.0}
$ET1_TFLA3 = {X 0.0, Y 0.0, Z 0.0
, A -90.0
,
B 135.0
,
C -90.0
}
KL-Richtung
-
+
www.kuka-robotics.com
KUKA Roboter mit Lineareinheiten
KUKA Roboter GmbH
|
R-PM
|
Maik Arnzen
|
31.01.2014
|
Seite 7
Introduction
Overview
Detailing
Outlook
Summary
KL gespiegelt / Bodenmontage – Transformation?
Bei der KL gespiegelt / Bodenmontage ist die Transformation identisch
zu den KL Standard Varianten.
Der folgende MADA Parameter ist jedoch zu ändern:
$RAT_MOT_AX[7]
N negativer Wert
Hinweis:
Das Vorzeichen des $RAT_MOT_AX[7] Wertes ändert die Drehrichtung der realen Achse!
Hinweis:
Die Software-Endschalter der KUKA Lineareinheit müssen eingestellt und geprüft werden!
www.kuka-robotics.com
KUKA Roboter mit Lineareinheiten
KUKA Roboter GmbH
|
R-PM
|
Maik Arnzen
|
31.01.2014
|
Seite 8
Introduction
Overview
Detailing
Outlook
Summary
KL Deckenmontage – Transformation?
Bei der Deckenmontage einer KL (Standard / gespiegelt) gelten die bereits
beschriebenen Transformationen.
Folgender MADA Parameter ist hier zusätzlich zu ändern:
$ERSYSROOT = {X 0.0, Y 0.0, Z 0.0, A 0.0, B 0.0, C
180.0
}
Hinweis:
Die Software-Endschalter der KUKA Lineareinheit müssen eingestellt und geprüft werden!
www.kuka-robotics.com
KUKA Roboter mit Lineareinheiten
KUKA Roboter GmbH
|
R-PM
|
Maik Arnzen
|
31.01.2014
|
Seite 9
Introduction
Overview
Detailing
Outlook
Summary
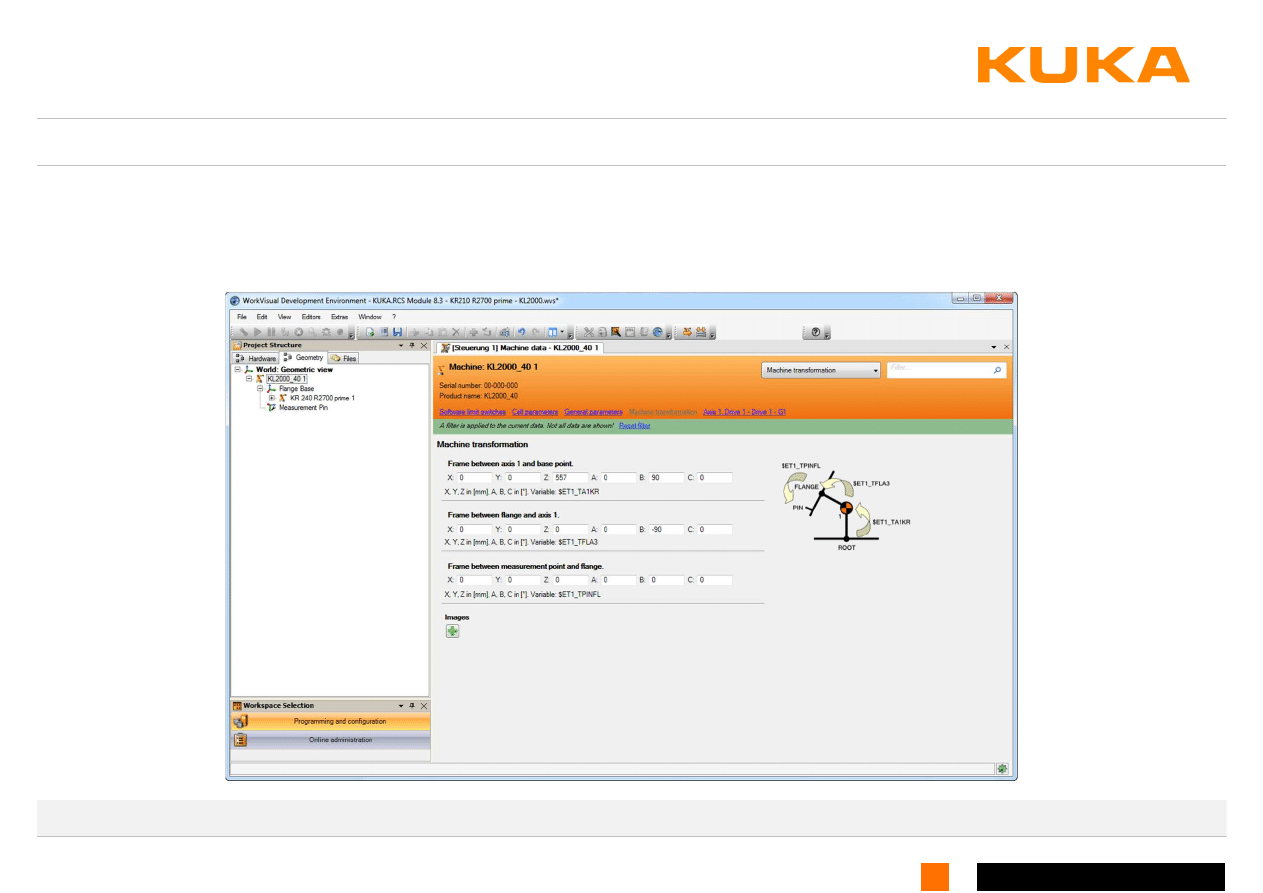
KL Transformation in KUKA.WorkVisual?
Die Werte der Transformation sind für den jeweiligen Montagefall in WoV
anzupassen und für die MADA Konfiguration des Roboters zu verwenden.
Wyszukiwarka
Podobne podstrony:
T7 Transformacja układu odniesienia
11 BIOCHEMIA horyzontalny transfer genów
Transformacje91
5 Algorytmy wyznaczania dyskretnej transformaty Fouriera (CPS)
11Tor z transformatoramiid 13123 ppt
ukladanie zdan kl I III
Transformacje2
3 Formy ochrony przyrody KL
20 H16 POST TRANSFUSION COMPLICATIONS KD 1st part PL
Immunologia Transfuzjologiczna1[1]
Semin 3 ST Ps kl Stres
urazy kl piersiowej 04 2006
3 Rodzaje jednorodnych transformacji stosowanych w kinematy
Transfer sk adki US
figury plaskie i ich obwody kl 1
więcej podobnych podstron