Mateusz Musiał gr. 7 b
Zadanie projektowe nr 3
Dobór napędu mechanizmu jazdy
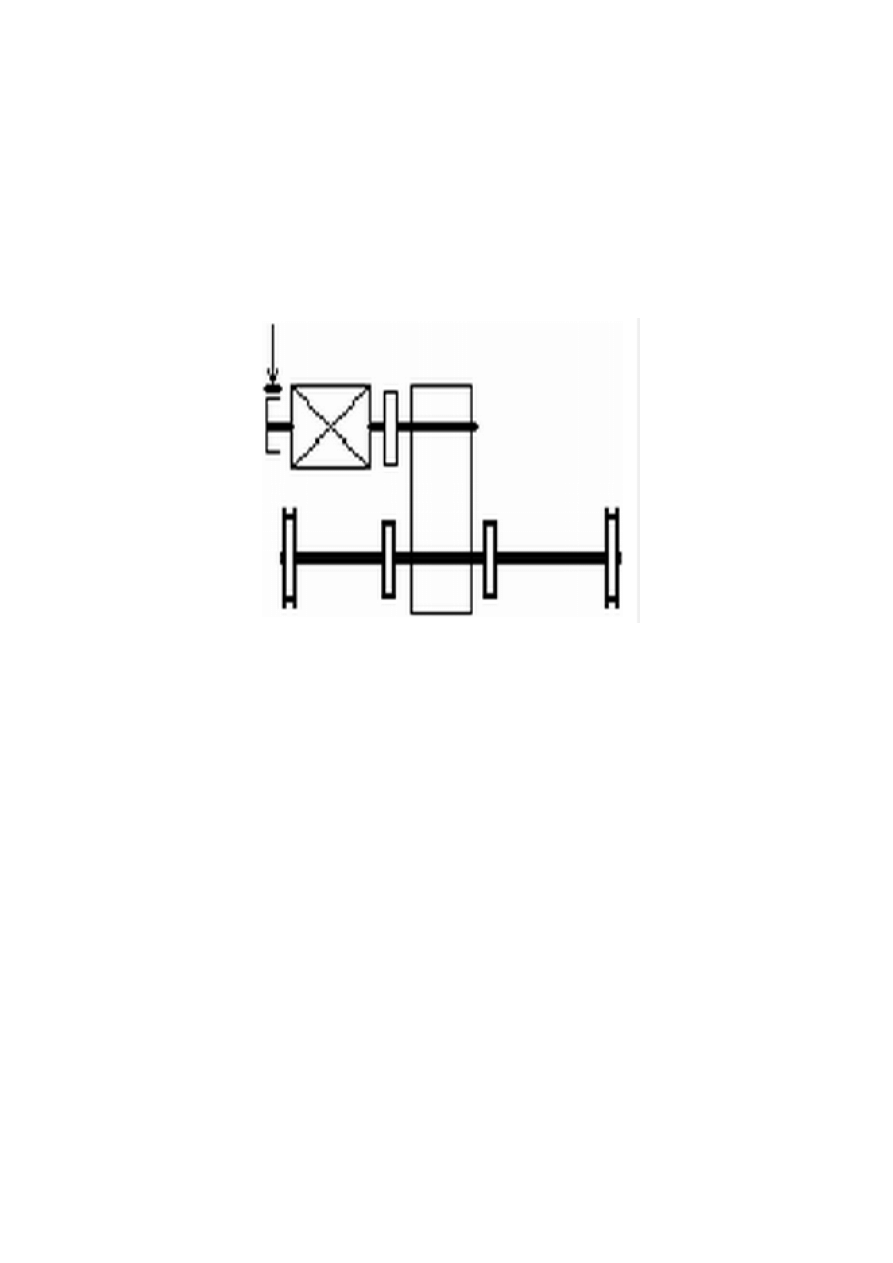
Schemat mechanizmu
DANE:
Moment obciążenia [kNm]
=0,95
Zakładana prędkość obrotowa silnika [obr/min]
= 1000
Zakładana prędkość obrotowa bębna [obr/min]
= 35
Sprawność układu
=0,85
Dobór komponentów
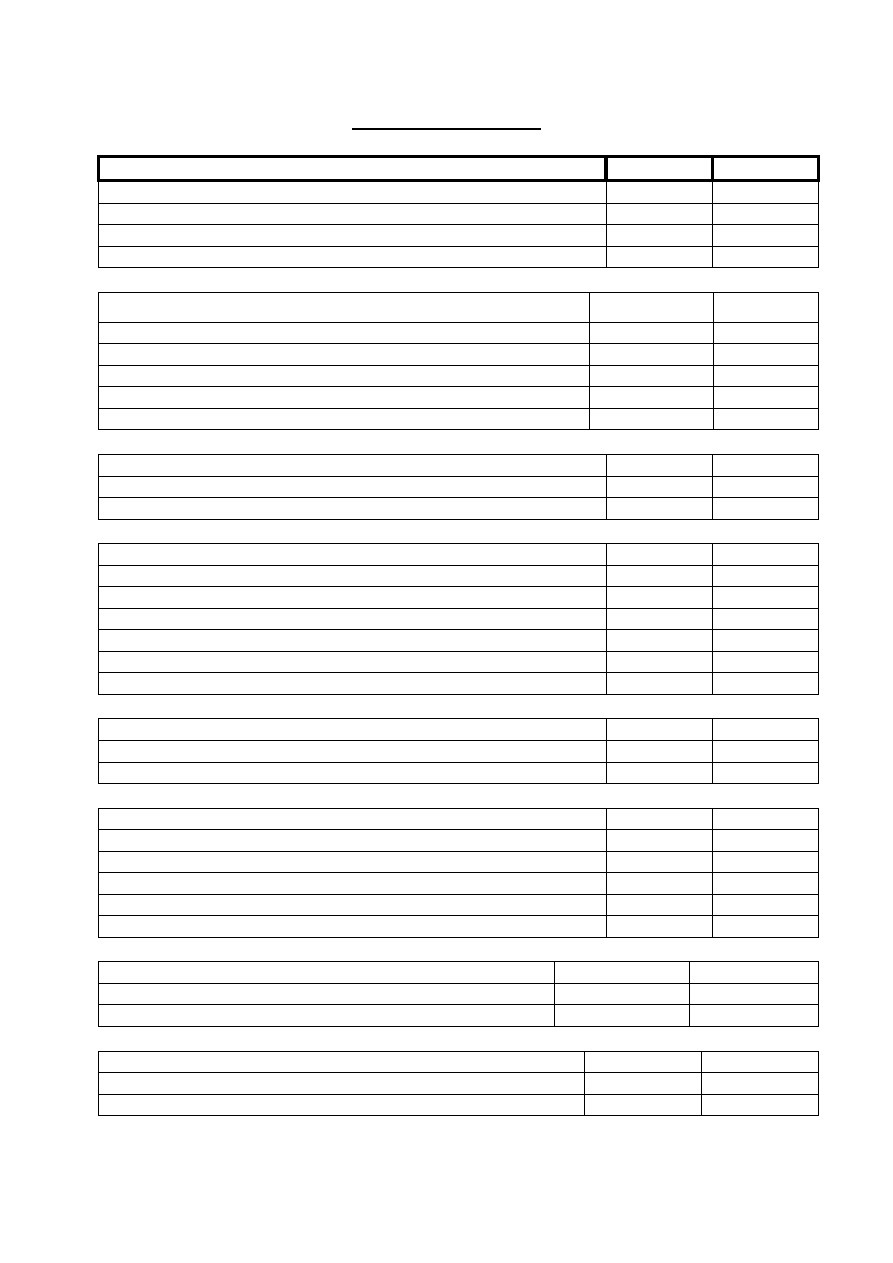
OBLICZONE PARAMETRY SILNIKA:
Parametr
Wariant 1
Wariant 2
Przełożenie układu
28,57
28,57
Obliczony moment obrotowy silnika [kNm]
0,03
0,03
Moc silnika konieczna do wytworzenia obliczonego momentu [kW]
3,48
3,48
Moc silnika z uwzględnieniem strat mechanicznych [kW]
4,10
4,10
DOBRANE PARAMETRY SILNIKA:
Typ silnika
SDCg160M6B
ACA132SA-
2/HE
Moc [kW]
5,5
5,5
Obroty [obr/min]
960
965
Sprawność [%]
85,5
86
Średnica czopa [mm]
42
38
Długość czopa [mm]
110
80
OBLICZONE PARAMETRY REDUKTORA:
Współczynnik trwałości reduktora
1,2
2
Przełożenie reduktora
27,43
27,57
Moc efektywna reduktora [kW]
6,6
11
PARAMETRY DOBRANEGO REDUKTORA:
Typ reduktora
2w125-286a H-140-28-2
Przełożenie reduktora
28
28
Moc reduktora [kW]
11,9
11,8
Średnica czopa szybkoobrotowego [mm]
28
40
Długość czopa szybkoobrotowego [mm]
80
11
Średnica czopa wolnoobrotowego [mm]
60
75
Długość czopa wolnoobrotowego [mm]
130
105
OBLICZONE PARAMETRY SPRZĘGŁA:
Współczynnik przeciążenia
1,05
1,05
Moment zastępczy [kNm]
0,03
0,03
Maksymalny moment przenoszony [kNm]
0,03
0,03
PARAMETRY DOBRANEGO SPRZĘGŁA:
Typ sprzęgła
Rotex 42
Bowex48
Nominalny moment obrotowy [kNm]
0,27
0,24
Średnica piasty napędzającej [mm]
42
38
Średnica piasty napędzanej [mm]
18
40
Dopuszczalna prędkość obrotowa [obr/min]
6000
6000
Moment bezwładności sprzęgła [kgm2]
0,0032
0,0007
Współczynniki trwałości reduktora(k1*k2*k3)
k1-
rodzaj pracy obciązenia
1,5(ciężka,)
1,35(ciężka
k2-
rodzaj pracy (liczba włączeń na godzine)
1,2(przerywana)
1,3 (przywan)
k3-
współczynnik rozruchu ( charakter obciążenia)
0,7(dynamiczn) 1,15(dynamicz)
Współczynniki przeciążenia sprzęgła(St*Sz*Sa)
St
– współczynnik temperaturowy
1(-30do30C)
1(-40do60C)
Sz
– współczynnik czestości załączeń
1(do 100/h)
1(do 10)
Sa
– współczynnik udarowy
1,5(ciezki)
1.5(ciezki)
Moment zastępczy sprzęgła
𝝎
𝒃
– wymagana prędkość kątowa bębna
𝝎
𝒔
- prędkość kątowa silnika
M – moment obciążenia silnika
𝑴
𝒛𝒔𝒑𝒓𝒛
= 𝑴 ∗
𝝎
𝒃
𝝎
𝒔
∗ 𝑺
𝒕
∗ 𝑺
𝒛
∗ 𝑺
𝒂
𝑴
𝒛𝒔𝒑𝒓𝒛
= 𝟎, 𝟗𝟓 ∗
𝟑𝟓
𝟏𝟎𝟎𝟎
∗ 𝟏 ∗ 𝟏 ∗ 𝟏, 𝟓 = 𝟎, 𝟎𝟑𝟒 𝒌𝑵𝒎
MOTOREDUKTOR (Motox - katalog Siemens)
Moc- 4kW
Prędkość wyjściowa – 39min
-1
Moment wyjściowy – 989 Nm
Przełożenie reduktora – 37,27
2KJ1105 - GH13 - W1
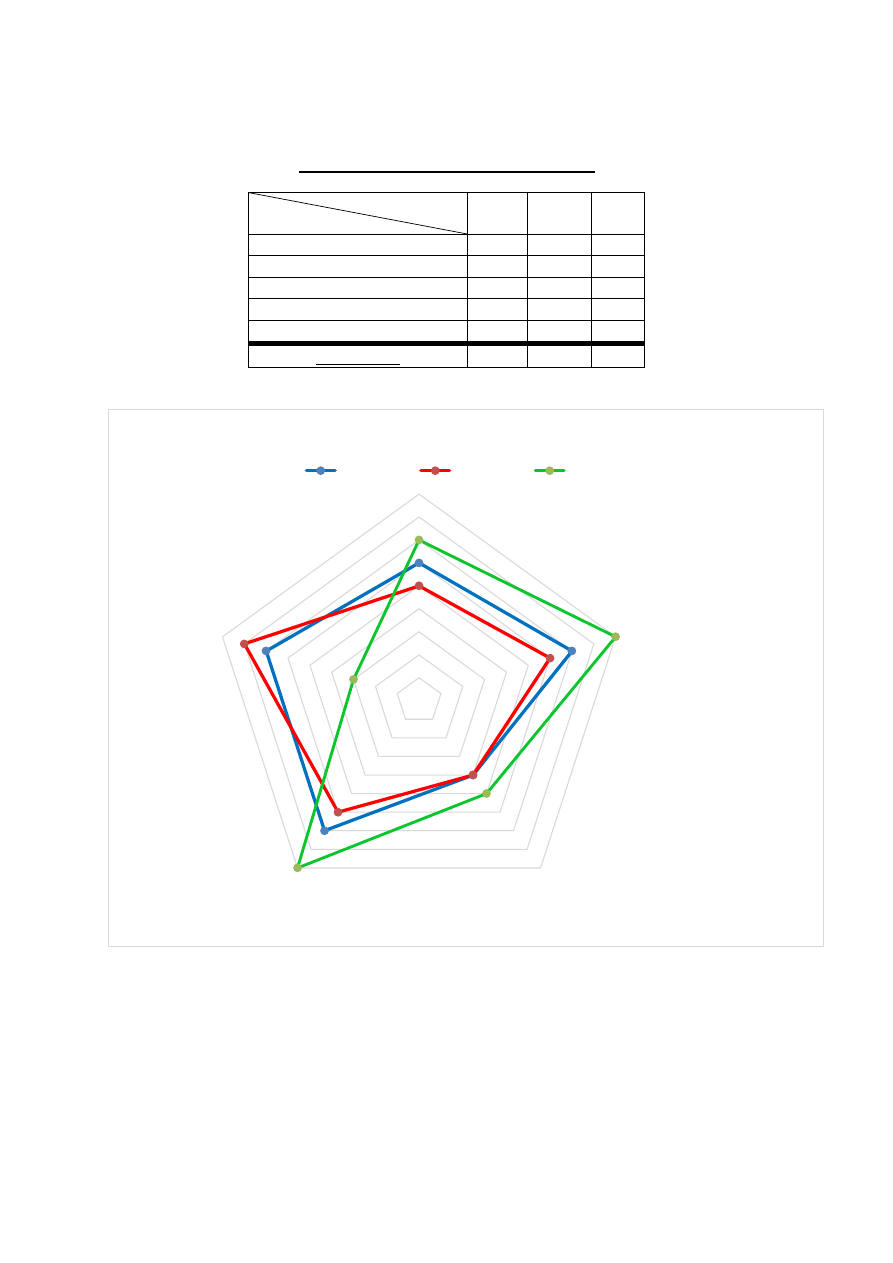
PORÓWNANIE WARIANTÓW
Wariant
Kryterium(waga)
W1
W2
W3
Bezpieczeństwo(3)
6
5
7
Gabaryty(5)
7
6
9
Pobór mocy(4)
4
4
5
Gwarancja(3)
7
6
9
Cena(5)
7
8
3
SUMA(20)
125
119
128
0
1
2
3
4
5
6
7
8
9
Wykres porównawczy
WARIANT 1
WARIANT 2
WARIANT 3
BEZPIECZENSTWO
GWARANCJA
POBÓR MOCY
GABARYTY
CENA

Wnioski
Z obliczeń wynika że najlepszy jest wariant 3. Cena, gabaryty oraz pobór mocy
są najważniejszymi parametrami moich wariantów. Pobór mocy dostał
podobną ilość punktów wagowych co cena gdyż przez ten współczynnik
będziemy mogli oszacować miesięczne koszty za pobierany prąd. W tym
przypadku gabaryty są bardzo ważnym czynnikiem gdyż mechanizm jazdy np.
przy suwnicach jest montowany na wysokości i jego waga czy też szerokość ma
znaczny wpływ na rodzaj konstrukcji oraz łatwość montażu. Parametr
bezpieczeństwo posiada tylko 3 punkty wagowe gdyż podczas pracy silnika na
suwnicy nikogo niema w pobliżu(operator steruje z ziemi)
W tabeli porównawczej są przedstawiane tylko i wyłącznie parametry po
doborze. Tabela nie uwzględnia czasu dobierania każdego wariantu. Trzeba
podkreślić że czas doboru motoreduktora jest 3 krotnie krótszy niż każdego
komponentu osobno. Podczas wyszukiwania silnika, sprzęgła, reduktora może
wystąpić pomyłka przy której cena każdego urządzenia wzrośnie parokrotnie
(przewymiarowanie)
Wyszukiwarka
Podobne podstrony:
Dobór napędu mechanizmu jazdy
Dobór napędu przenośnika taśmowego
IMiU W02 Dobór napedu UEM
Mechanizm jazdy
IMW W02 Dobor napedu id 212334 Nieznany
IMiU W02 Dobór napedu UEM
Dobór napędu przenośnika taśmowego
Dobór nart styl jazdy ocena umiejetnosci jaka dlugosc
IMW W03 Dobór napedu
Projekt mechanizmu jazdy
Schemat mechanizmu jazdy wozka
Dobór napędu przenośnika taśmowego
mechanizm jazdy PII
Projekt mechanizmu jazdy wciagarki
rozkład jazdy z miernictwa (1), IŚ Tokarzewski 27.06.2016, V semestr COWiG, PKM (Podstawy konstrukcj
więcej podobnych podstron