Dr inż. Janusz Dębiński
1
5. Analiza statyczna płaskich układów prętowych
Definicja siły
5.1. Siła
Siła jest wektorową miarą oddziaływania jednego ciała na drugie.
W niniejszym kursie Mechaniki ogólnej będziemy rozpatrywać tylko oddziaływanie ciał będących
w bezpośrednim kontakcie.
Siła jest jednoznacznie określona przez swoją wartość czyli długość wektora, kierunek
oraz zwrot.
Dla większości naszych obliczeń nie będzie miało znaczenia to, że siła może się poruszać po
prostej pokrywającej się z kierunkiem jej działania. Jest więc ona wektorem ślizgającym.
Istnieją jednak przypadki, kiedy siłę traktujemy jako wektor związany.
Dr inż. Janusz Dębiński
2
5. Analiza statyczna płaskich układów prętowych
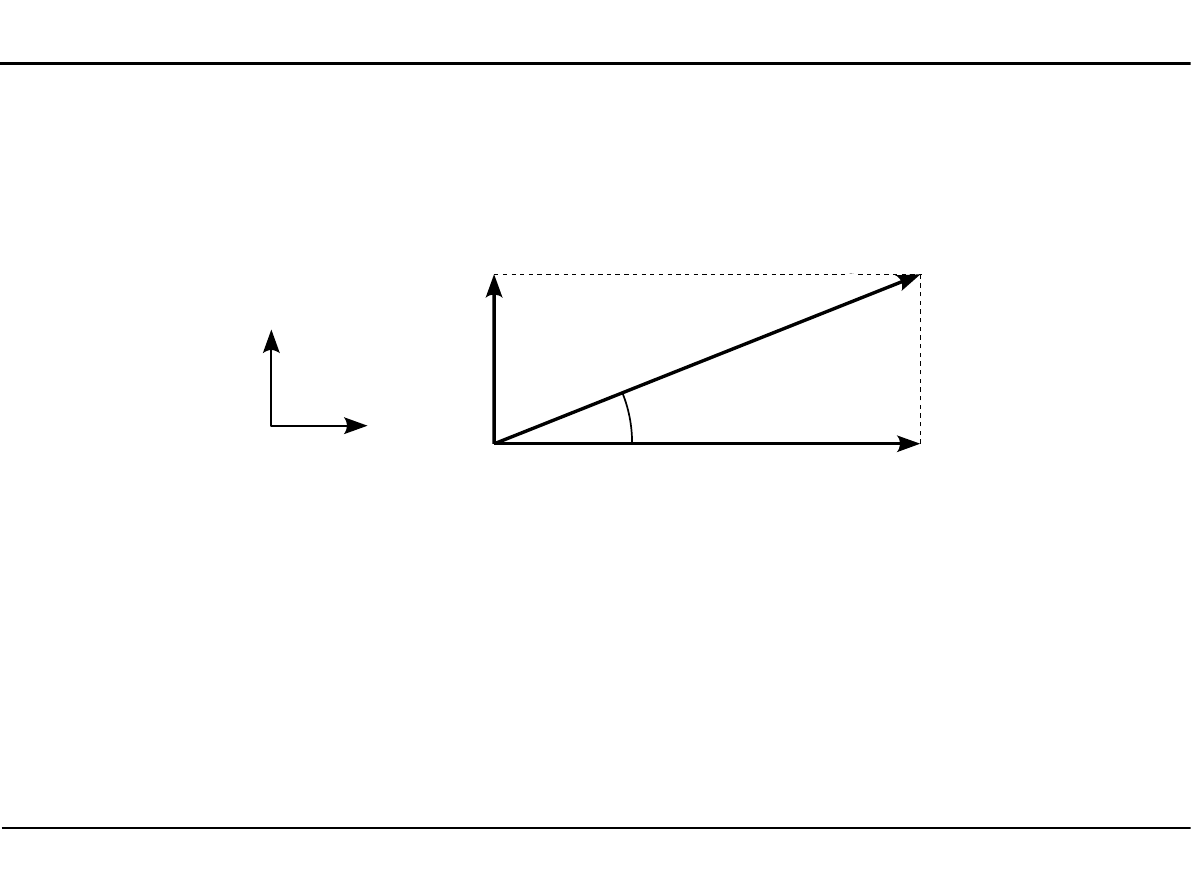
Rozkładanie siły na kierunek poziomy i pionowy
5.1. Siła
X
Y
P
P
X
P
Y
α
P
X
=
P⋅cos
P
Y
=
P⋅sin
Wartości sił składowych
Wartość siły składowej jest dodatnia, jeżeli siła ma zwrot zgodny ze zwrotem osi.
Dr inż. Janusz Dębiński
3
5. Analiza statyczna płaskich układów prętowych
a
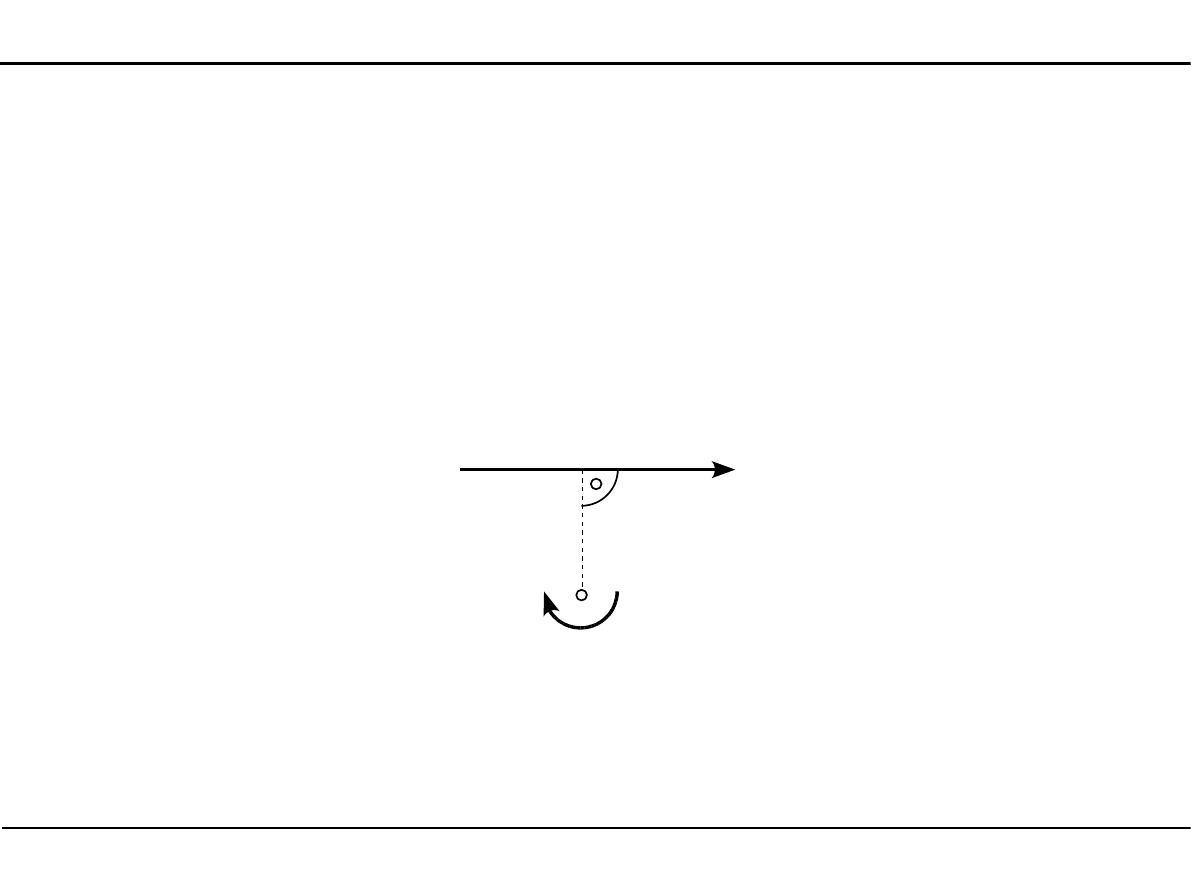
Moment siły względem punktu
5.1. Siła
M
O
=
∣
P
∣
⋅
a =∣P∣⋅a
a - odległość kierunku siły od punktu O
P - wartość siły.
P
O
M
O
W niniejszym kursie Mechaniki ogólnej będziemy przyjmować, że dodatni moment siły
względem punktu kręci zgodnie z ruchem wskazówek zegara.
Dr inż. Janusz Dębiński
4
5. Analiza statyczna płaskich układów prętowych
a
3
a
1
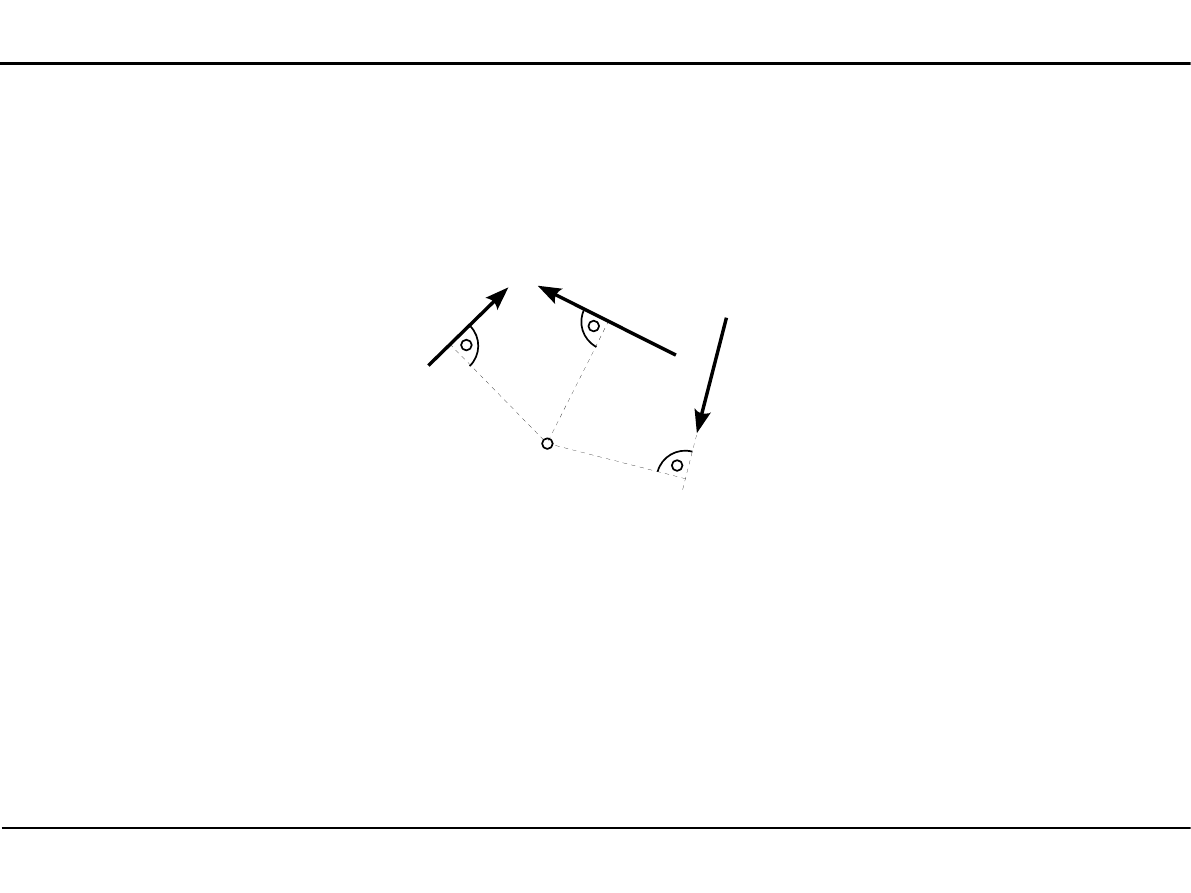
Moment siły względem punktu
5.1. Siła
P
1
P
2
P
3
O
a
2
M
O
=
∣
P
1
∣
⋅
a
1
−
∣
P
2
∣
⋅
a
2
∣
P
3
∣
⋅
a
3
Dr inż. Janusz Dębiński
5
5. Analiza statyczna płaskich układów prętowych
Moment siły względem punktu
5.1. Siła
2,
0
kN
5,0 kN
3,
0
kN
A
[m]
1,
0
2,0
3,0
M
A
=
2,0⋅2,0
−
5,0⋅1,0
−
3,0⋅3,0=−10,0 kN⋅m
Dr inż. Janusz Dębiński
6
5. Analiza statyczna płaskich układów prętowych
x
5.1. Siła
Para sił
M
O
=−∣
P∣⋅
xa
∣
P∣⋅x=−∣P∣⋅a
P
P
O
a
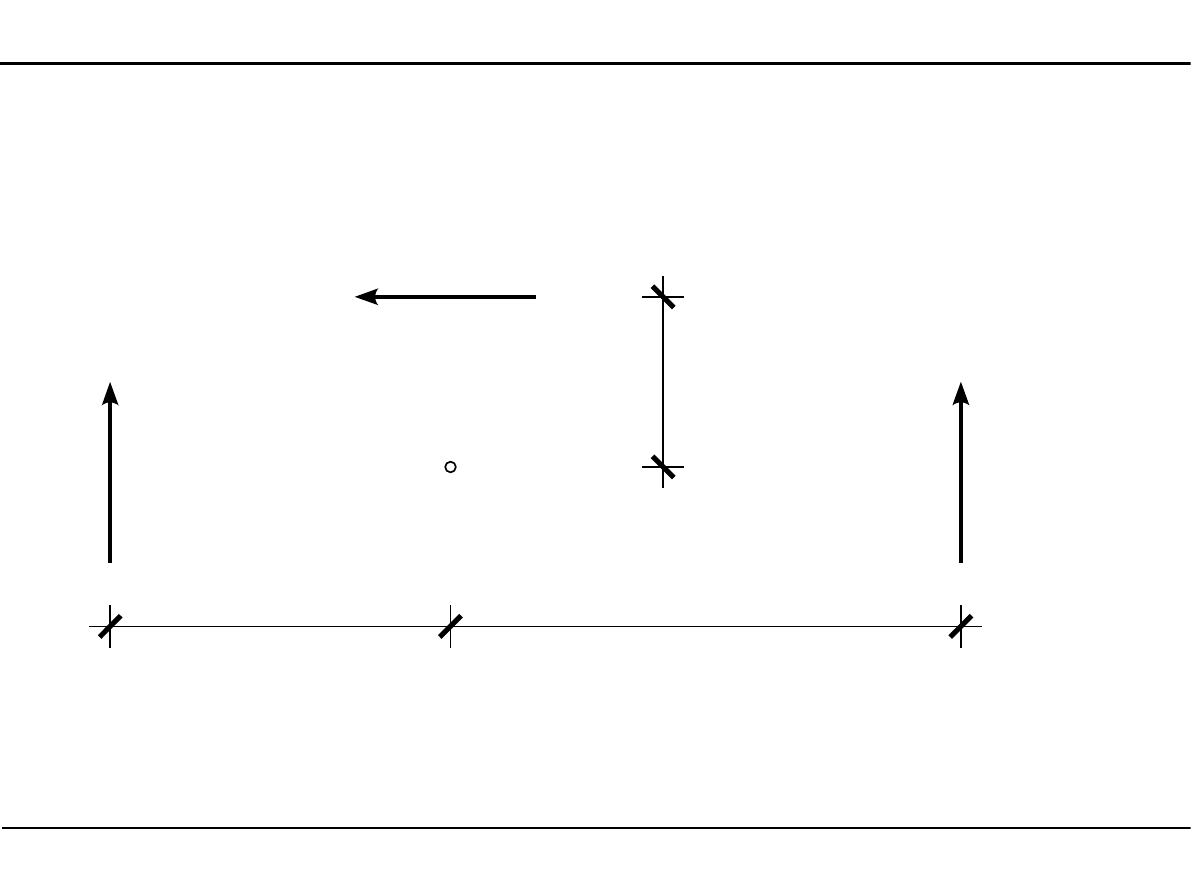
Jak więc widać wartość tego momentu jest zawsze taka sama bez względu na to,
w którym miejscu znajduje się punkt O.
Moment ten nazywamy momentem obrotowym, a jego wartość równa się iloczynowi wartości siły
P przez odległość tych sił od siebie a.
Jeżeli para sił kręci względem siebie zgodnie z ruchem wskazówek zegara, to moment obrotowy
jest dodatni, jeżeli przeciwnie, to ujemny.
Wektor momentu pary sił M
0
jest wektorem swobodnym, ponieważ możemy go przyłożyć
w dowolnym punkcie płaszczyzny i ma on zawsze ten sam zwrot, wartość i kierunek.
Dr inż. Janusz Dębiński
7
5. Analiza statyczna płaskich układów prętowych
5.1. Siła
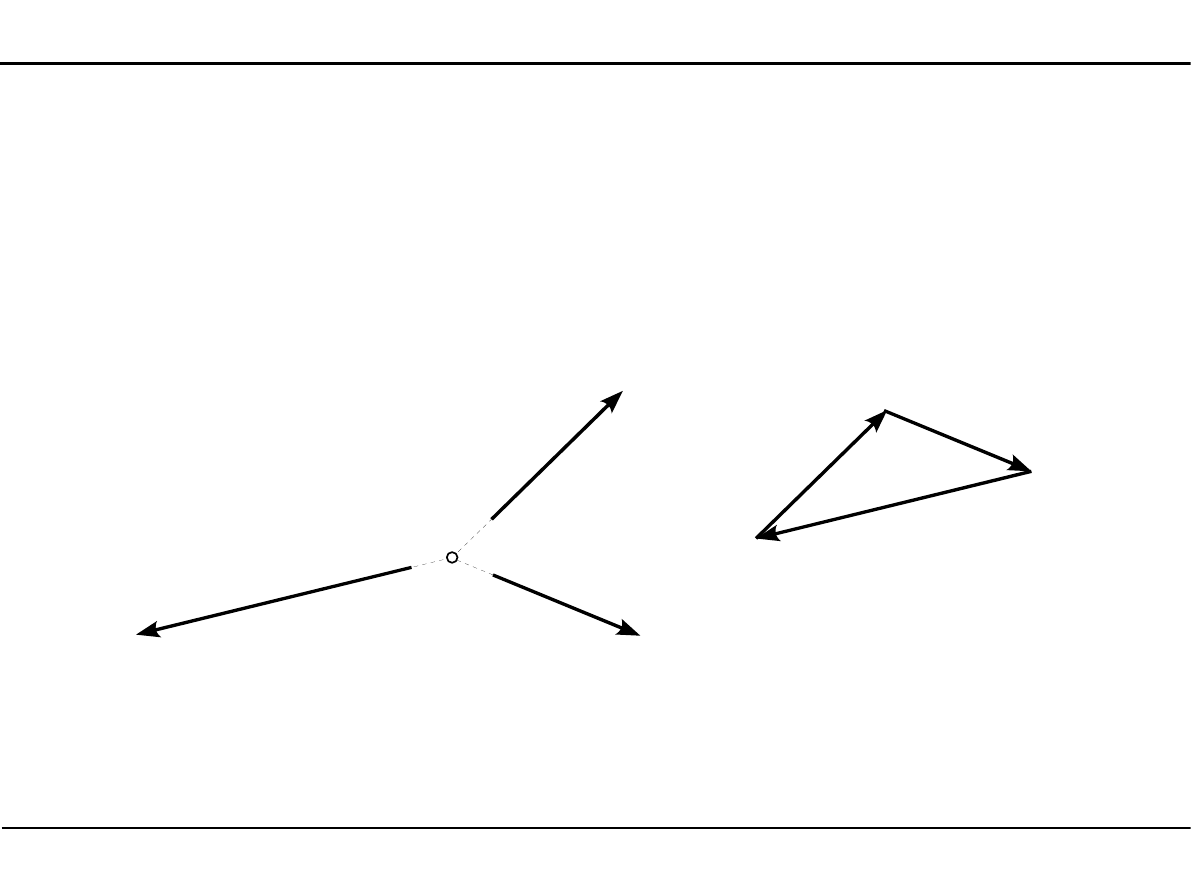
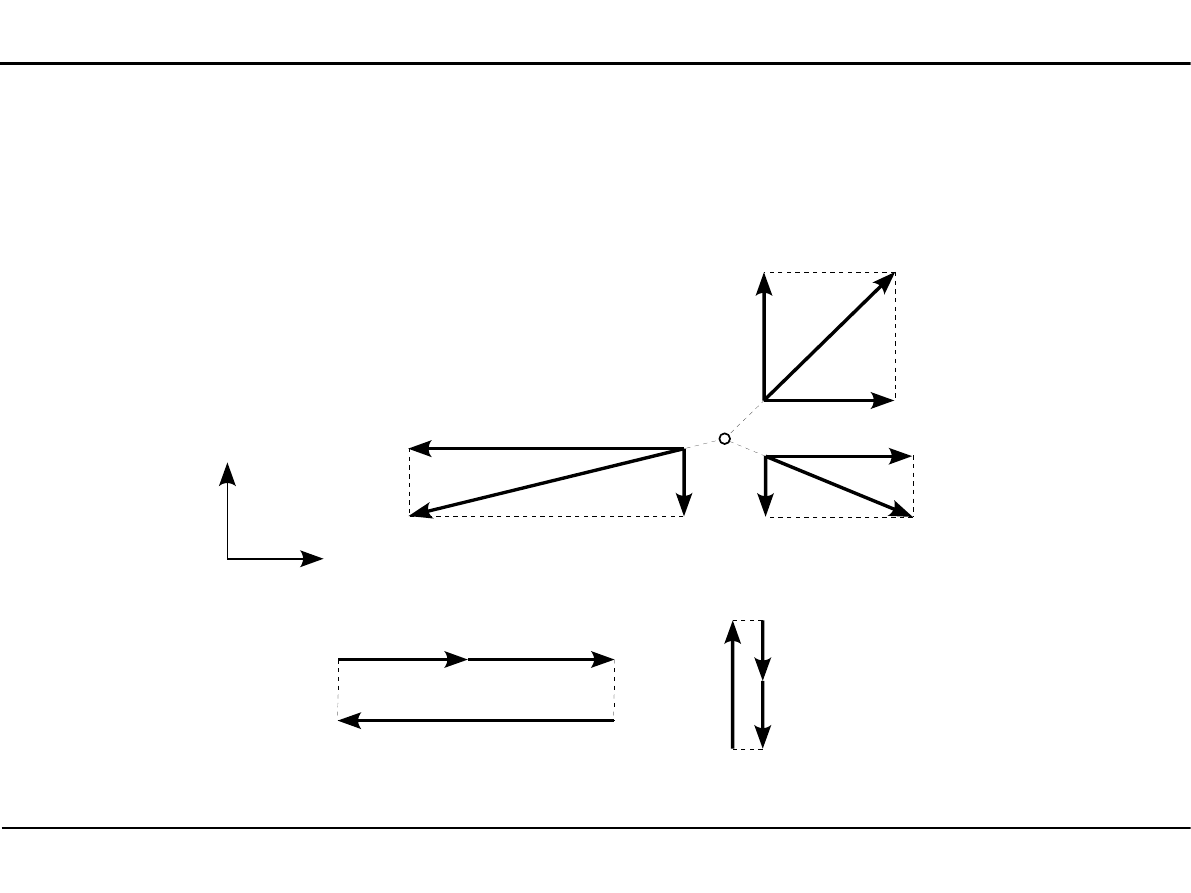
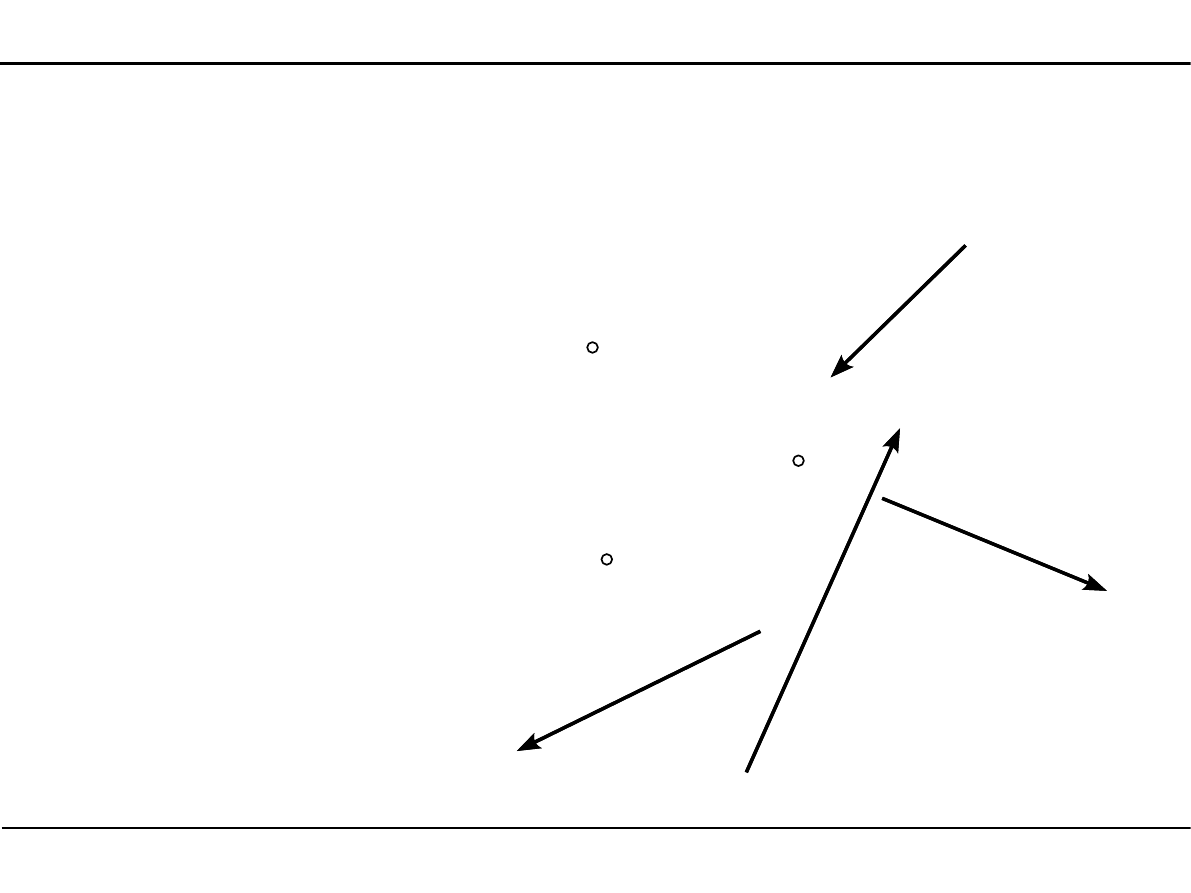
Płaski układ sił zbieżnych
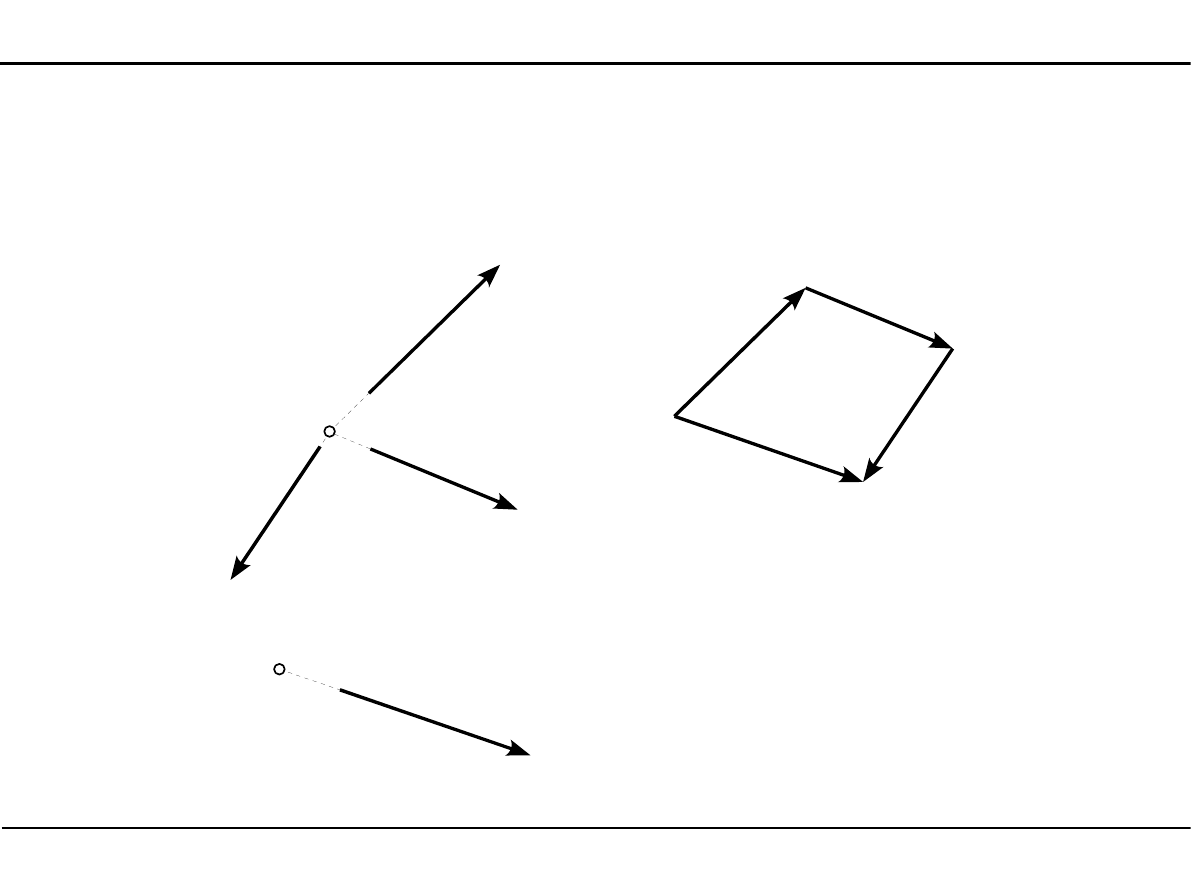
Płaskim układem sił zbieżnych nazywamy siły, których kierunki leżą na jednej płaszczyźnie
i przecinają się wszystkie w jednym punkcie O.
Aby znaleźć siłę wypadkową z płaskiego układu sił zbieżnych zastosujemy wielobok sił.
Kierunek siły wypadkowej przechodzi przez punkt O.
Dr inż. Janusz Dębiński
8
5. Analiza statyczna płaskich układów prętowych
5.1. Siła
Płaski układ sił zbieżnych
P
1
P
2
P
3
O
P
1
P
2
P
3
W
O
W
Dr inż. Janusz Dębiński
9
5. Analiza statyczna płaskich układów prętowych
5.1. Siła
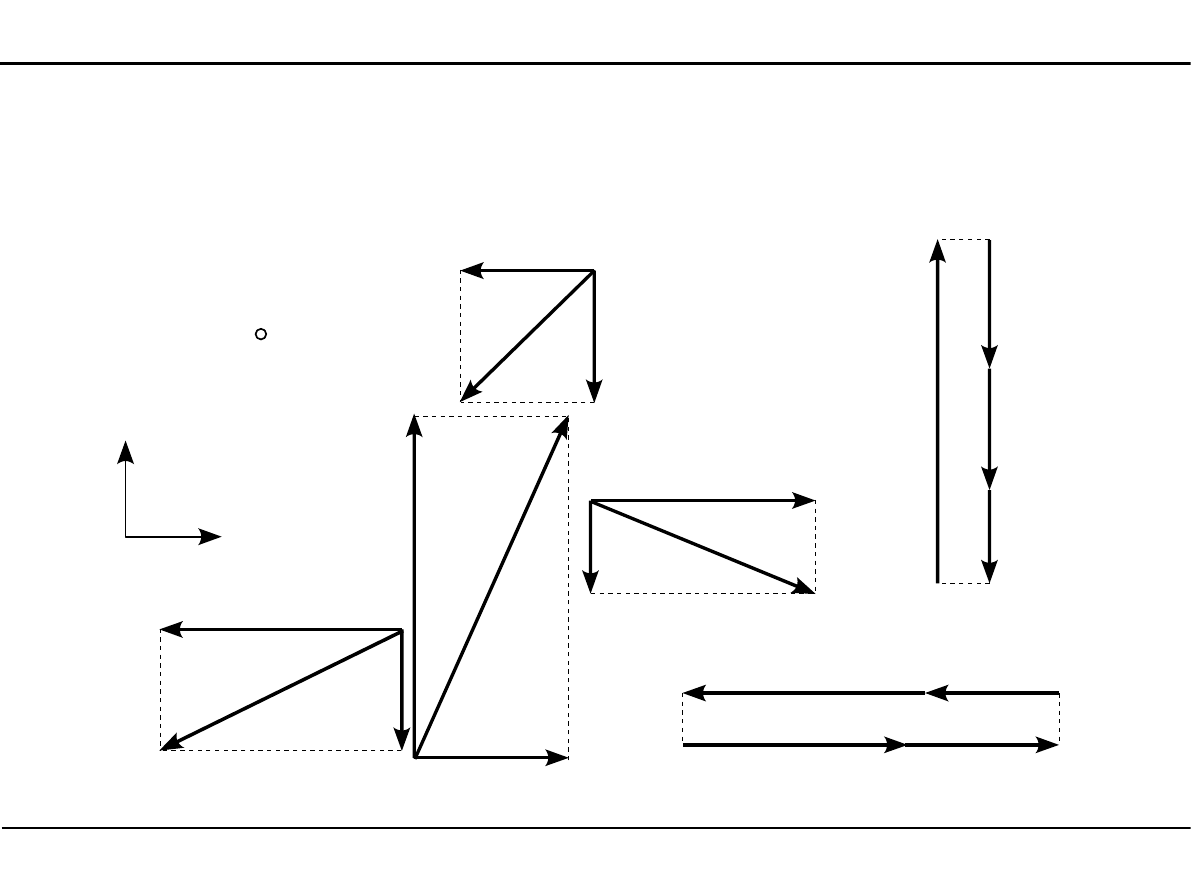
Płaski układ sił zbieżnych
Aby płaski układ sił zbieżnych znajdował się w równowadze, wielobok sił musi być wielobokiem
zamkniętym. Oznacza to, że siła wypadkowa z takiego układu musi być równa zero.
P
1
P
2
P
3
O
P
1
P
2
P
3
Dr inż. Janusz Dębiński
10
5. Analiza statyczna płaskich układów prętowych
5.1. Siła
Płaski układ sił zbieżnych
P
1
O
P
2
P
3
X
Y
P
1X
P
1Y
P
2X
P
2Y
P
3X
P
3Y
P
1X
Siły są wektorami związanymi.
P
2X
P
3X
P
2Y
P
3Y
P
1Y
Dr inż. Janusz Dębiński
11
5. Analiza statyczna płaskich układów prętowych
5.1. Siła
Płaski układ sił zbieżnych
Aby płaski układ sił zbieżnych znajdował się w równowadze muszą więc być spełnione równania
równowagi.
∑
i=1
i=n
P
iX
=
0
∑
i=1
i=n
P
iY
=
0
Dr inż. Janusz Dębiński
12
5. Analiza statyczna płaskich układów prętowych
5.1. Siła
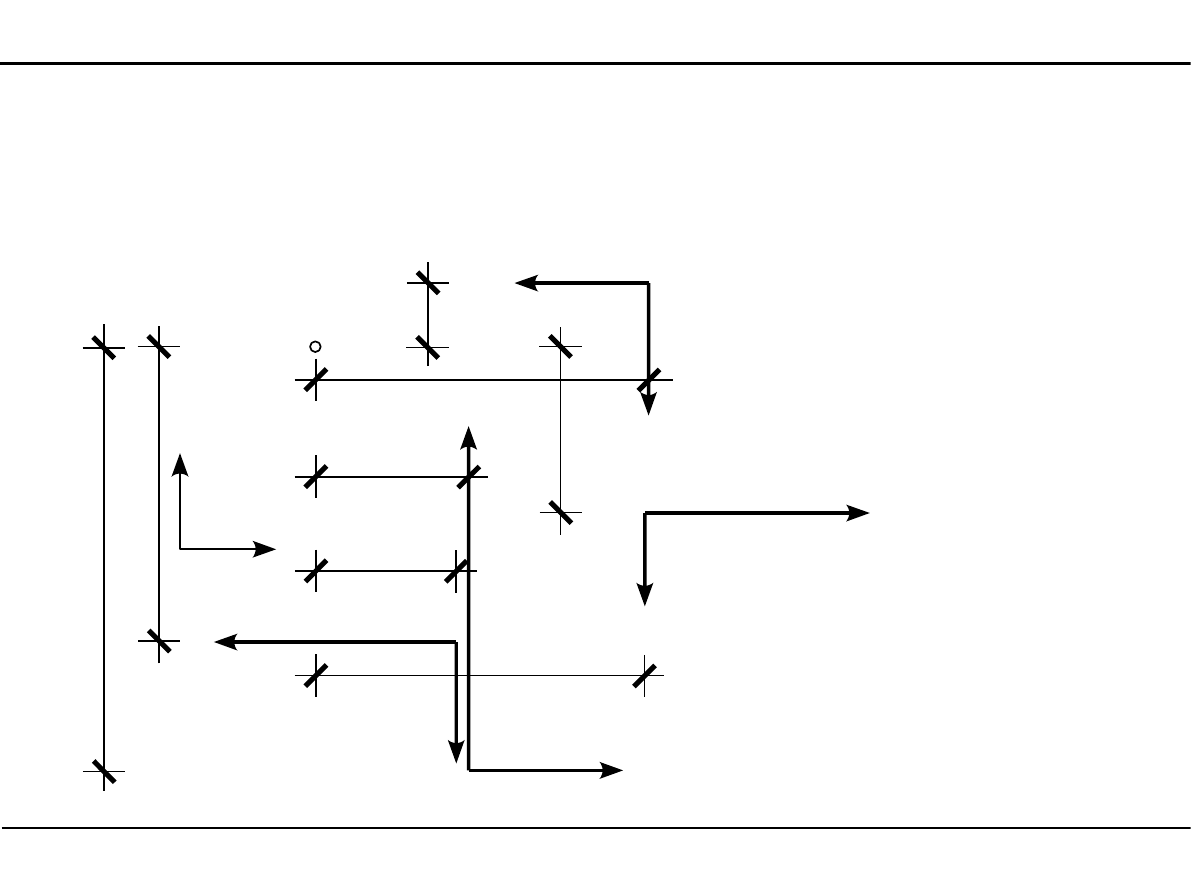
Płaski układ sił niezbieżnych
P
1
P
2
P
3
P
4
X
Y
P
1X
P
1Y
P
2X
P
2Y
P
3X
P
3Y
P
4X
P
4Y
P
1X
P
3X
P
2X
P
4X
P
4Y
P
1Y
P
3Y
P
2Y
O
Dr inż. Janusz Dębiński
13
5. Analiza statyczna płaskich układów prętowych
5.1. Siła
Płaski układ sił niezbieżnych
M
O
=
∑
i=1
i=n
∣
P
iX
∣
⋅
a
iY
∣
P
iY
∣
⋅
a
iX
P
1X
P
1Y
P
2X
P
2Y
P
3X
P
3Y
P
4X
P
4Y
X
Y
O
a
1X
a
2X
a
3X
a
4X
a
1
Y
a
2
Y
a
3Y
a
4
Y
Dr inż. Janusz Dębiński
14
5. Analiza statyczna płaskich układów prętowych
5.1. Siła
Płaski układ sił niezbieżnych
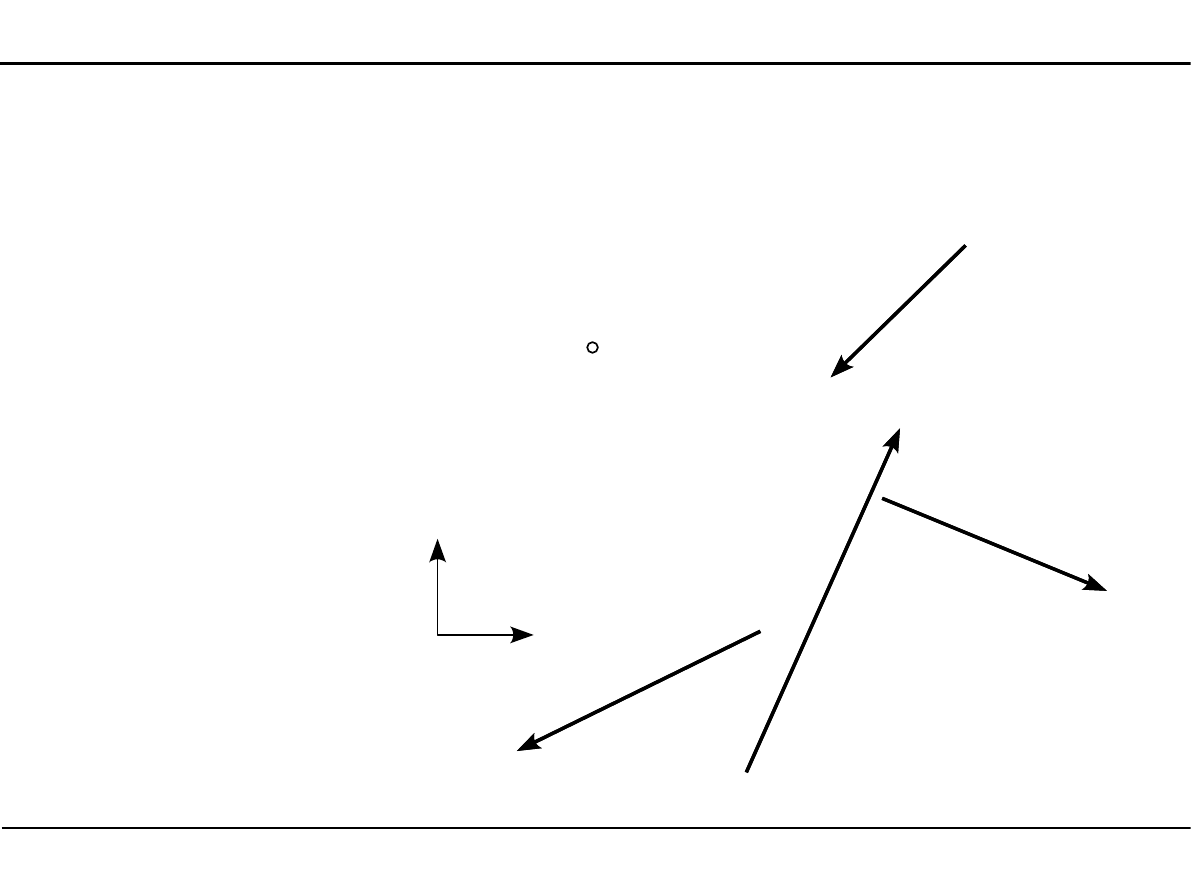
Aby płaski układ sił niezbieżnych znajdował się w równowadze muszą być spełnione równania
równowagi:
∑
i=1
i=n
P
iX
=
0
∑
i=1
i=n
P
iY
=
0
∑
i=1
i=n
M
O
=
0
P
1
P
2
P
3
P
4
P
1
P
2
P
3
P
4
X
Y
O
Dr inż. Janusz Dębiński
15
5. Analiza statyczna płaskich układów prętowych
5.1. Siła
Płaski układ sił niezbieżnych
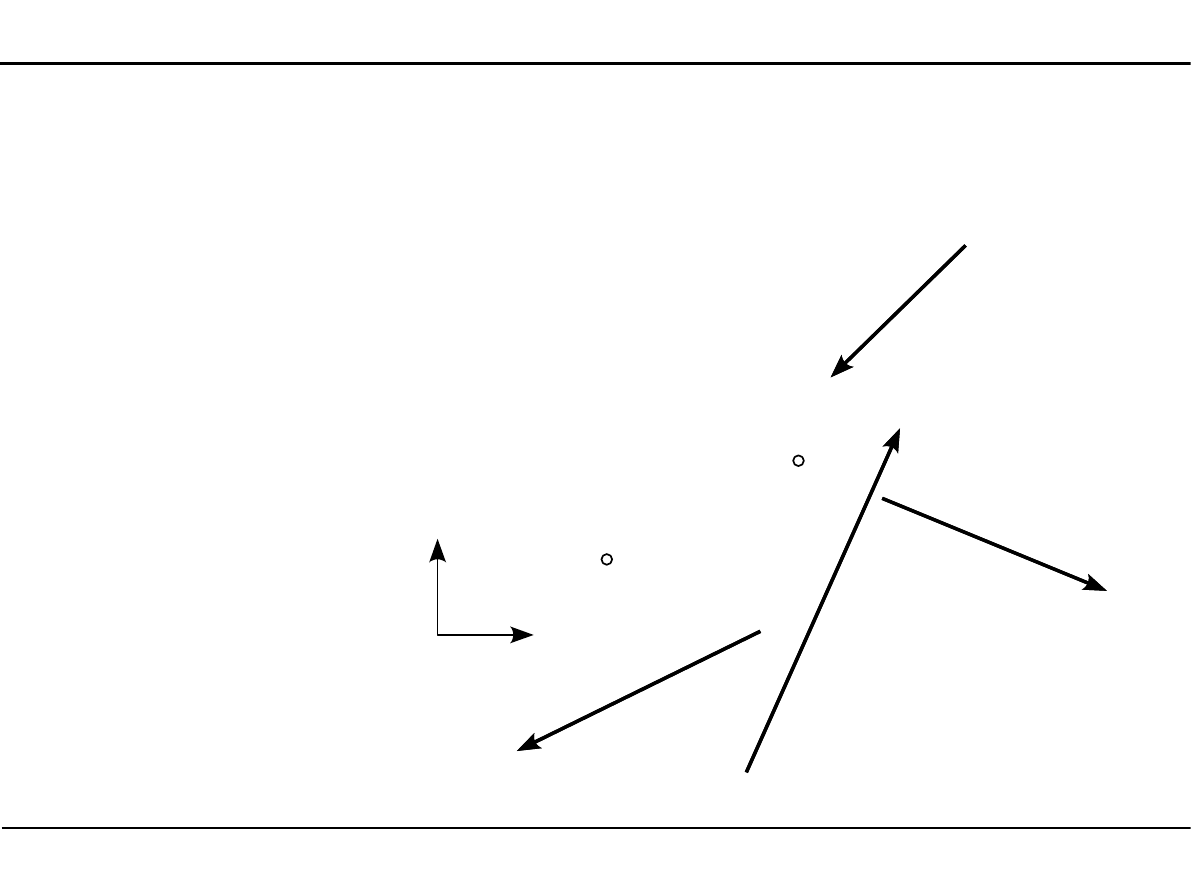
Aby płaski układ sił niezbieżnych znajdował się w równowadze muszą być spełnione równania
równowagi:
∑
i=1
i=n
P
iX
=
0
∑
i=1
i=n
M
O 1
=
0
∑
i=1
i=n
M
O 2
=
0
P
1
P
2
P
3
P
4
P
1
P
2
P
3
P
4
X
Y
O
1
O
2
Punkty O
1
, O
2
nie mogą
leżeć na prostej
równoległej do osi X.
Dr inż. Janusz Dębiński
16
5. Analiza statyczna płaskich układów prętowych
5.1. Siła
Płaski układ sił niezbieżnych
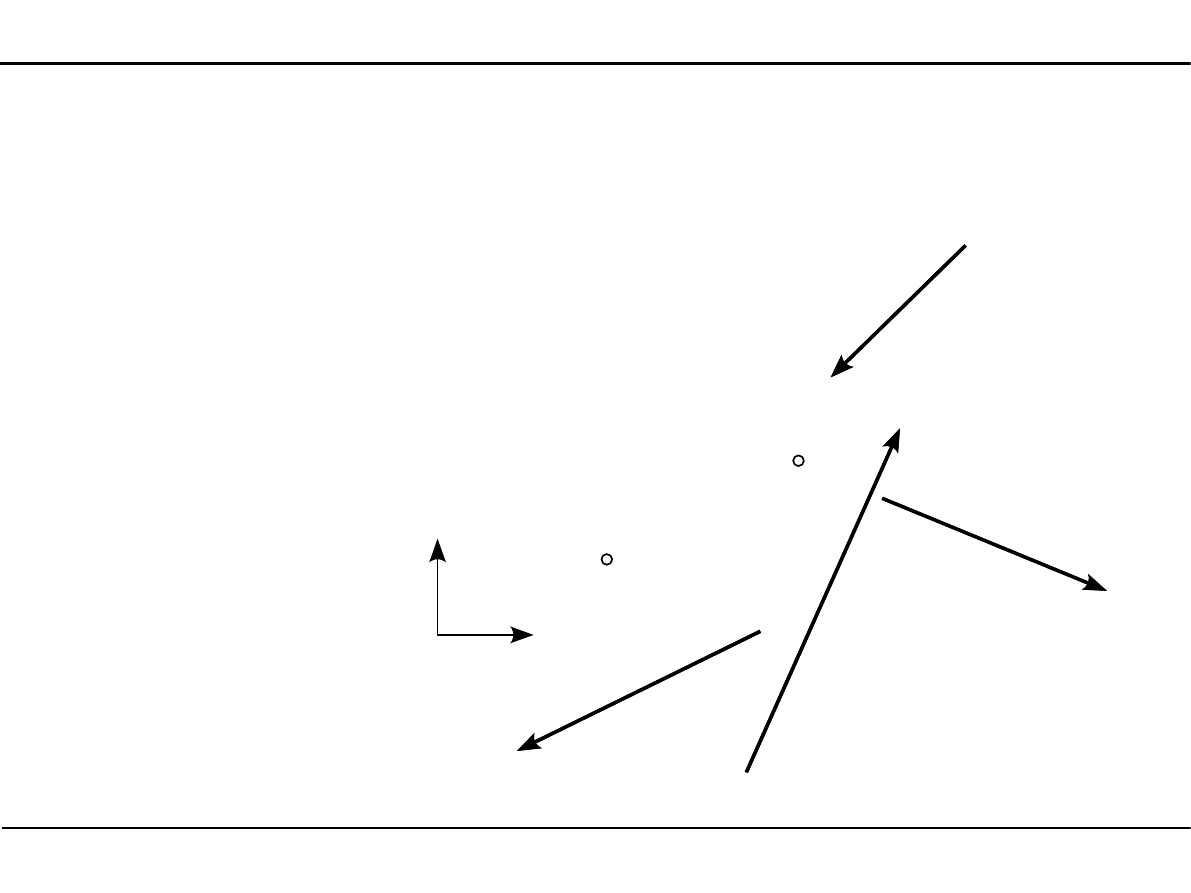
Aby płaski układ sił niezbieżnych znajdował się w równowadze muszą być spełnione równania
równowagi:
∑
i=1
i=n
M
O 1
=
0
∑
i=1
i=n
M
O 2
=
0
P
1
P
2
P
3
P
4
P
1
P
2
P
3
P
4
X
Y
O
1
O
2
∑
i=1
i=n
P
iY
=
0
Punkty O
1
, O
2
nie mogą
leżeć na prostej
równoległej do osi Y.
Dr inż. Janusz Dębiński
17
5. Analiza statyczna płaskich układów prętowych
5.1. Siła
Płaski układ sił niezbieżnych
Aby płaski układ sił niezbieżnych znajdował się w równowadze muszą być spełnione równania
równowagi:
∑
i=1
i=n
M
O 1
=
0
∑
i=1
i=n
M
O 2
=
0
∑
i=1
i=n
M
O 3
=
0
P
1
P
2
P
3
P
4
P
1
P
2
P
3
P
4
O
1
O
2
O
3
Punkty O
1
, O
2
i O
3
nie mogą
leżeć na jednej prostej.
Dr inż. Janusz Dębiński
18
5. Analiza statyczna płaskich układów prętowych
5.2. Analiza statyczna
Siły czynne i reakcje
TP
1
2
3
P
P - siła czynna
R
R - reakcja czyli siła bierna
I
Analiza statyczna - wyznaczanie wartości i zwrotów reakcji.
Dr inż. Janusz Dębiński
19
5. Analiza statyczna płaskich układów prętowych
5.2. Analiza statyczna
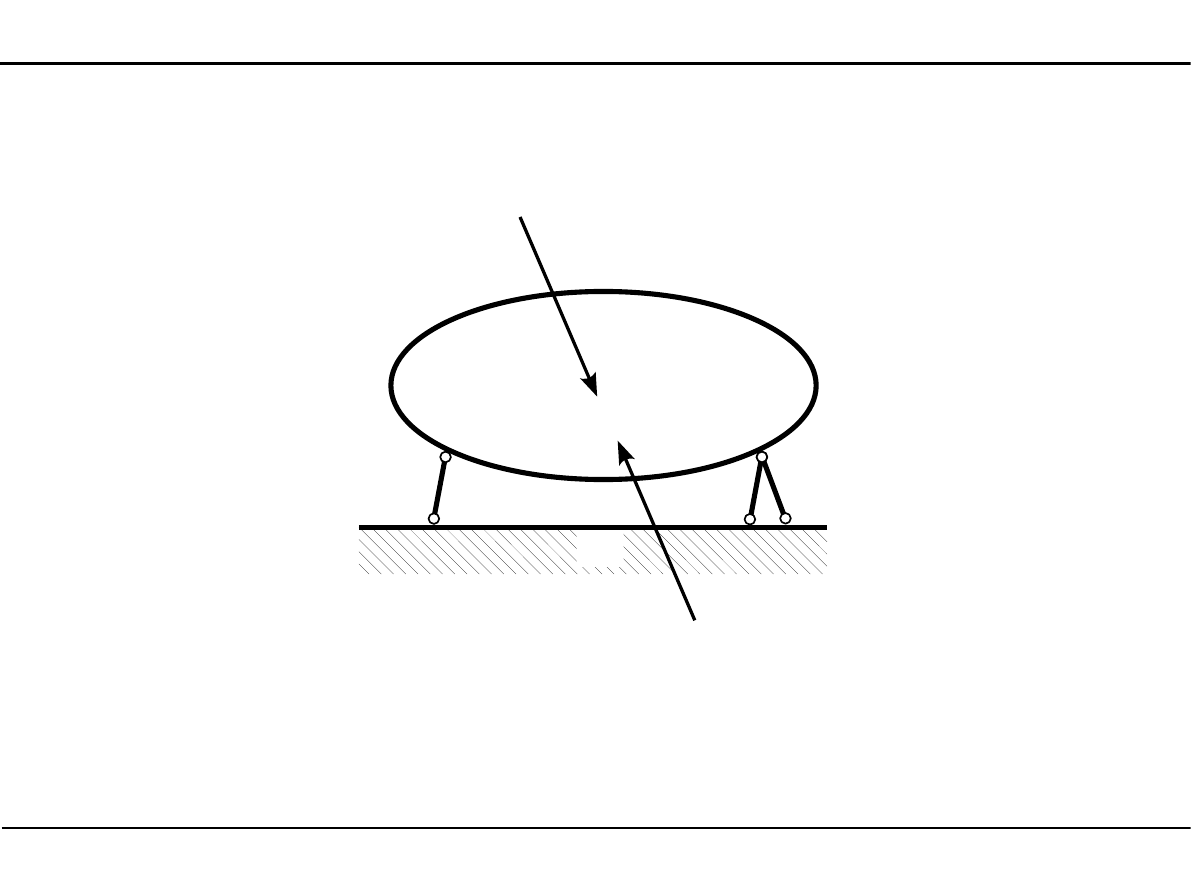
Reakcja w pręcie podporowym
W pręcie podporowym łączącym tarczę sztywną z tarczą podporową działa tylko jedna reakcja,
której kierunek działania pokrywa się z kierunkiem pręta podporowego.
TP
1
R
1
Dr inż. Janusz Dębiński
20
5. Analiza statyczna płaskich układów prętowych
5.2. Analiza statyczna
Reakcja w pręcie podporowym
Jeżeli pręt podporowy numer 1 łączy
dwie tarcze sztywne, z których żadna nie jest
tarczą podporową.
I
II
1
P
1
P
2
I
II
P
1
P
2
R
1
(I)
R
1
(II)
R
1
I
=
R
1
II
Jeżeli rozpatrujemy obie tarcze sztywne
razem, to reakcje te równoważą się.
Dr inż. Janusz Dębiński
21
5. Analiza statyczna płaskich układów prętowych
α
5.2. Analiza statyczna
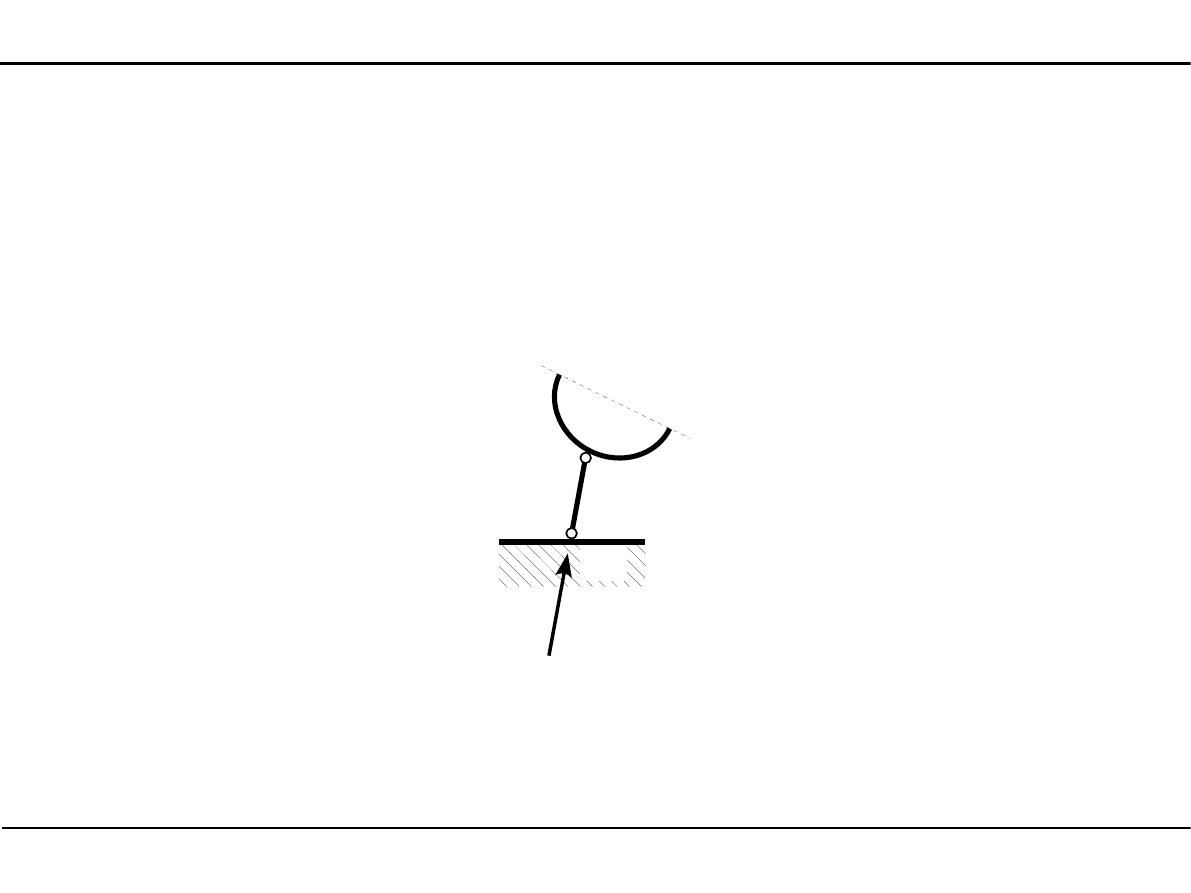
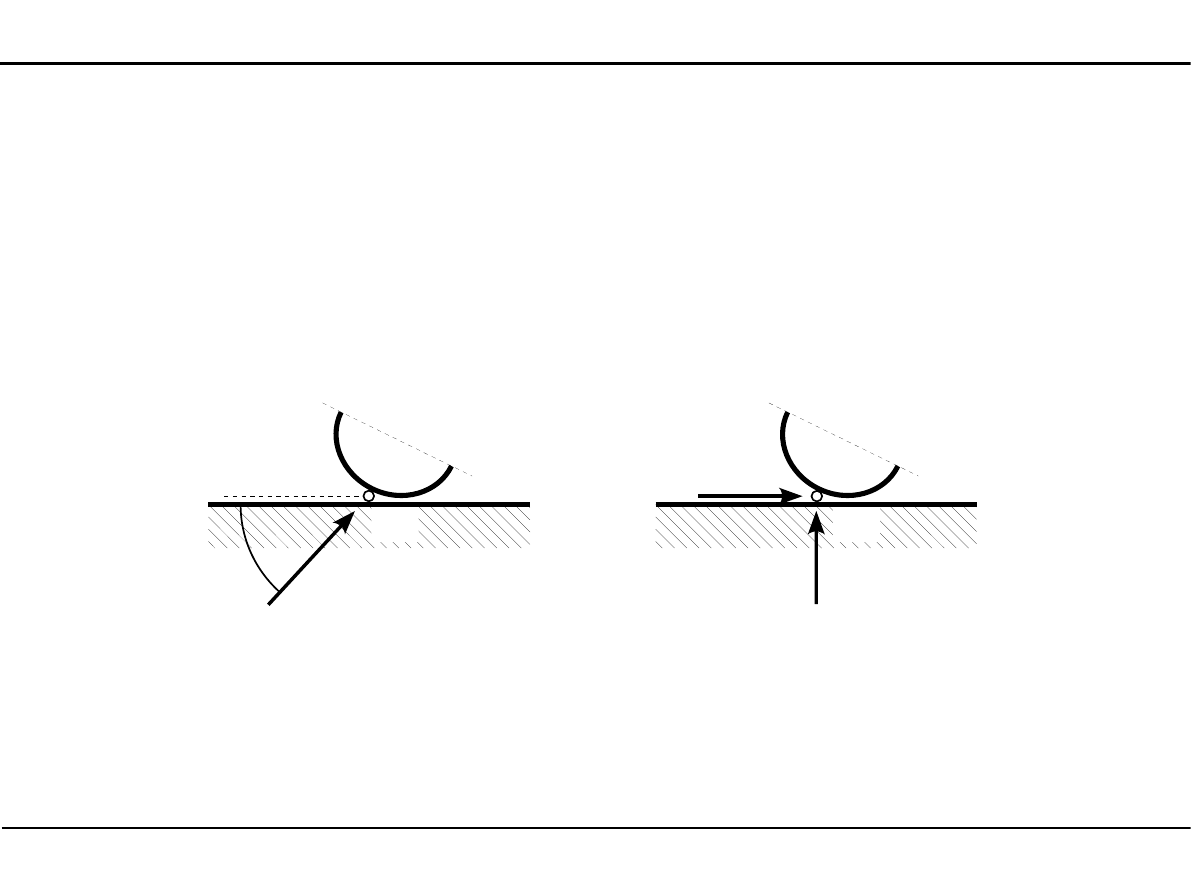
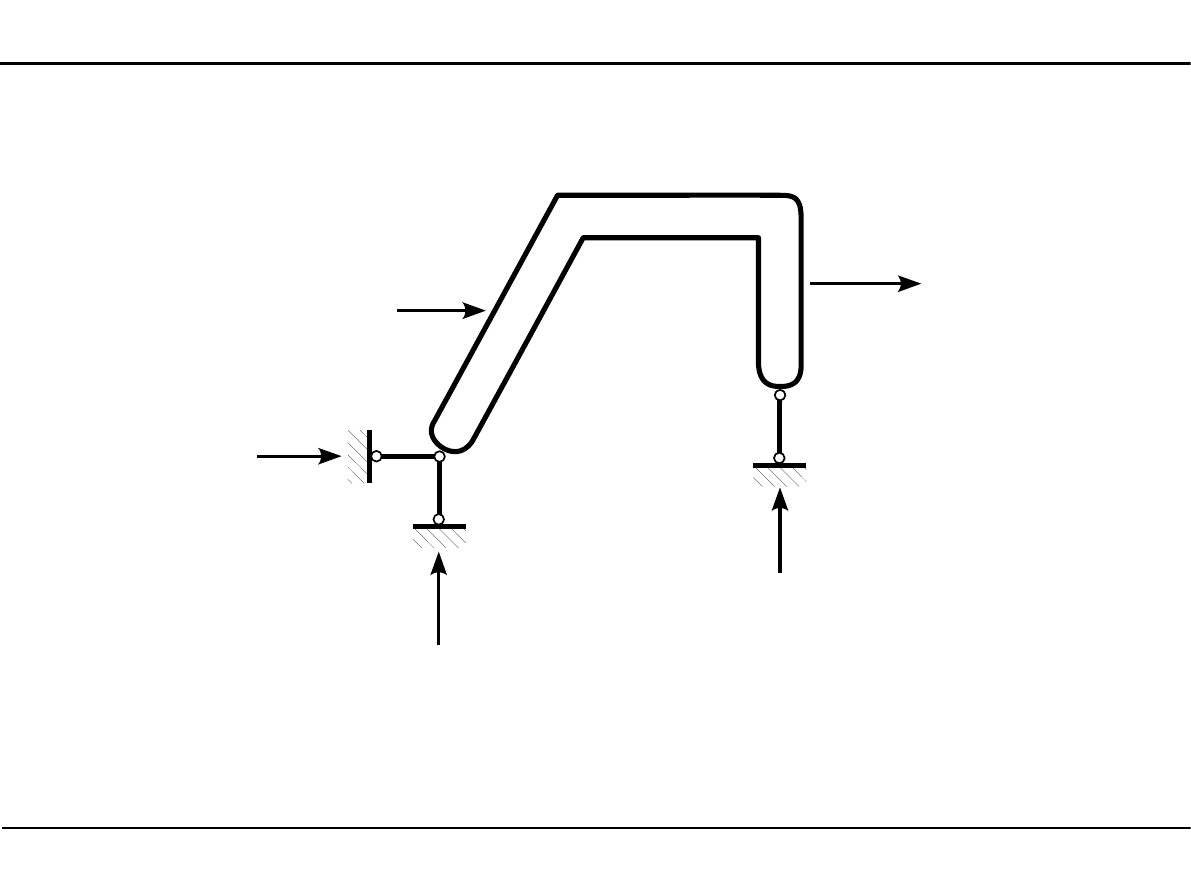
Reakcja w przegubie
W przegubie łączącym tarczę sztywną z tarczą podporową działa także jedna reakcja, której
kierunek działania przechodzi przez ten przegub.
W przeciwieństwie do pręta podporowego nie znamy kąta nachylenia kierunku jej działania.
Aby wyznaczyć reakcję, rozkładamy ją więc na dwie reakcje składowe: poziomą i pionową.
TP
A
R
A
TP
A
V
A
H
A
Dr inż. Janusz Dębiński
22
5. Analiza statyczna płaskich układów prętowych
5.2. Analiza statyczna
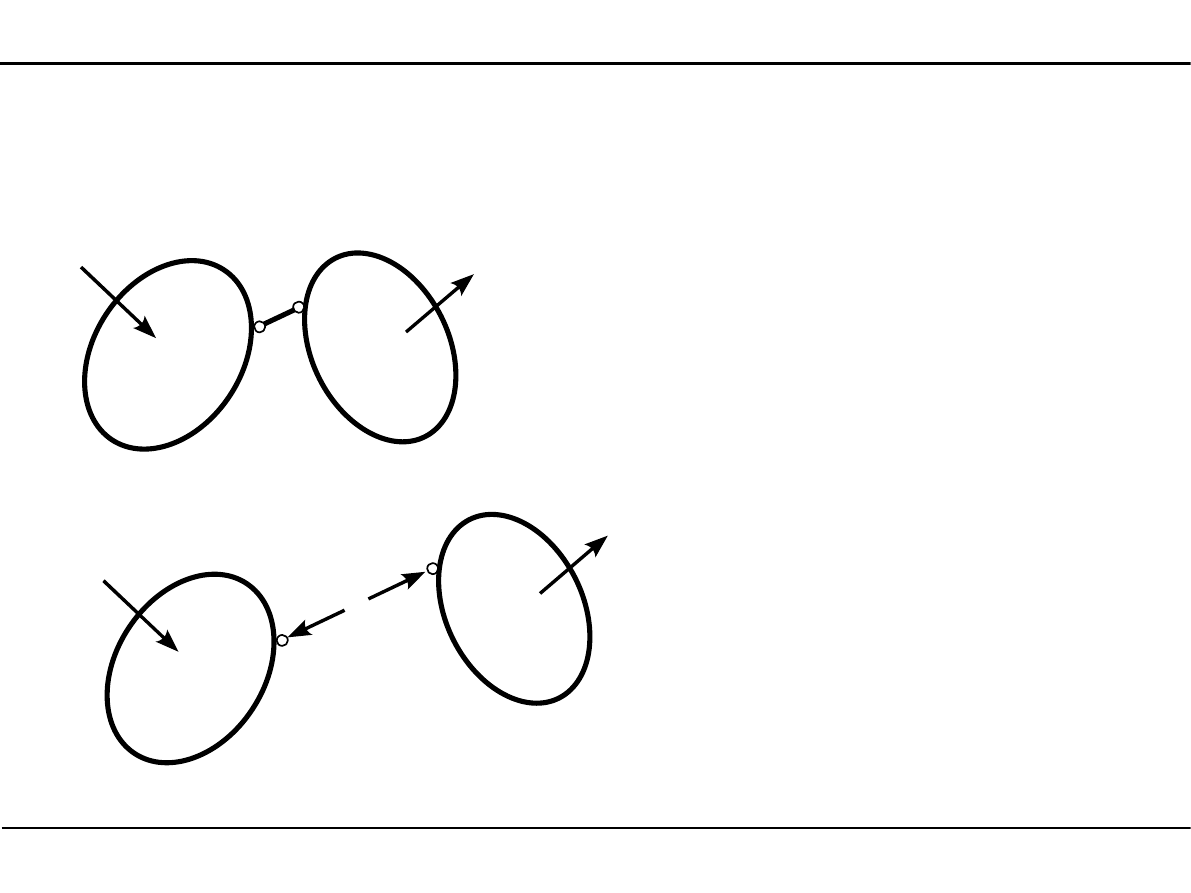
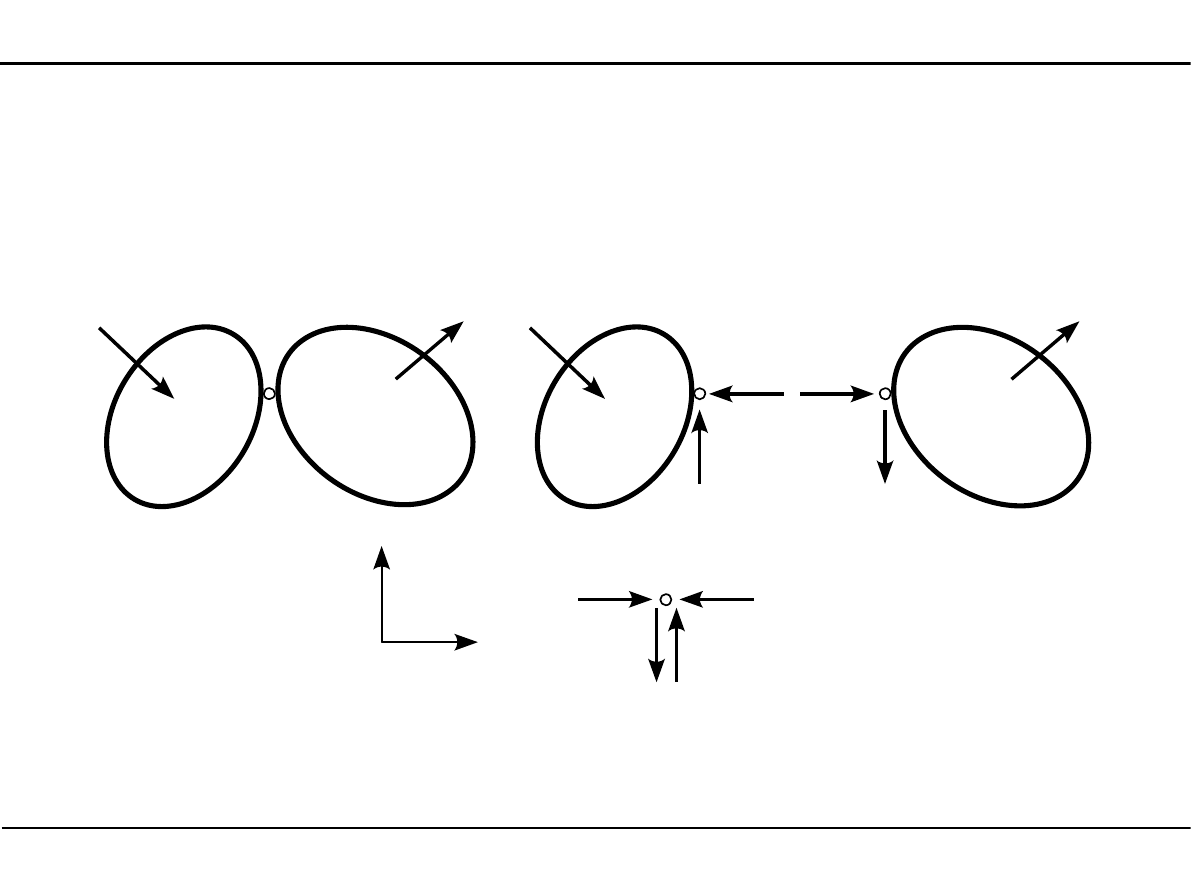
Reakcja w przegubie
Przegub łączący dwie tarcze sztywne, z których żadna nie jest tarczą sztywną.
I
II
A
P
1
P
2
I
II
A
A
P
1
P
2
V
A
(I)
V
A
(II)
H
A
(I)
H
A
(II)
A
H
A
(I)
H
A
(II)
V
A
(I)
V
A
(II)
X =H
A
I
−
H
A
II
=
0
Y =−V
A
I
V
A
II
=
0
X
Y
H
A
(I)
=H
A
(II)
V
A
(I)
=V
A
(II)
Dr inż. Janusz Dębiński
23
5. Analiza statyczna płaskich układów prętowych
5.2. Analiza statyczna
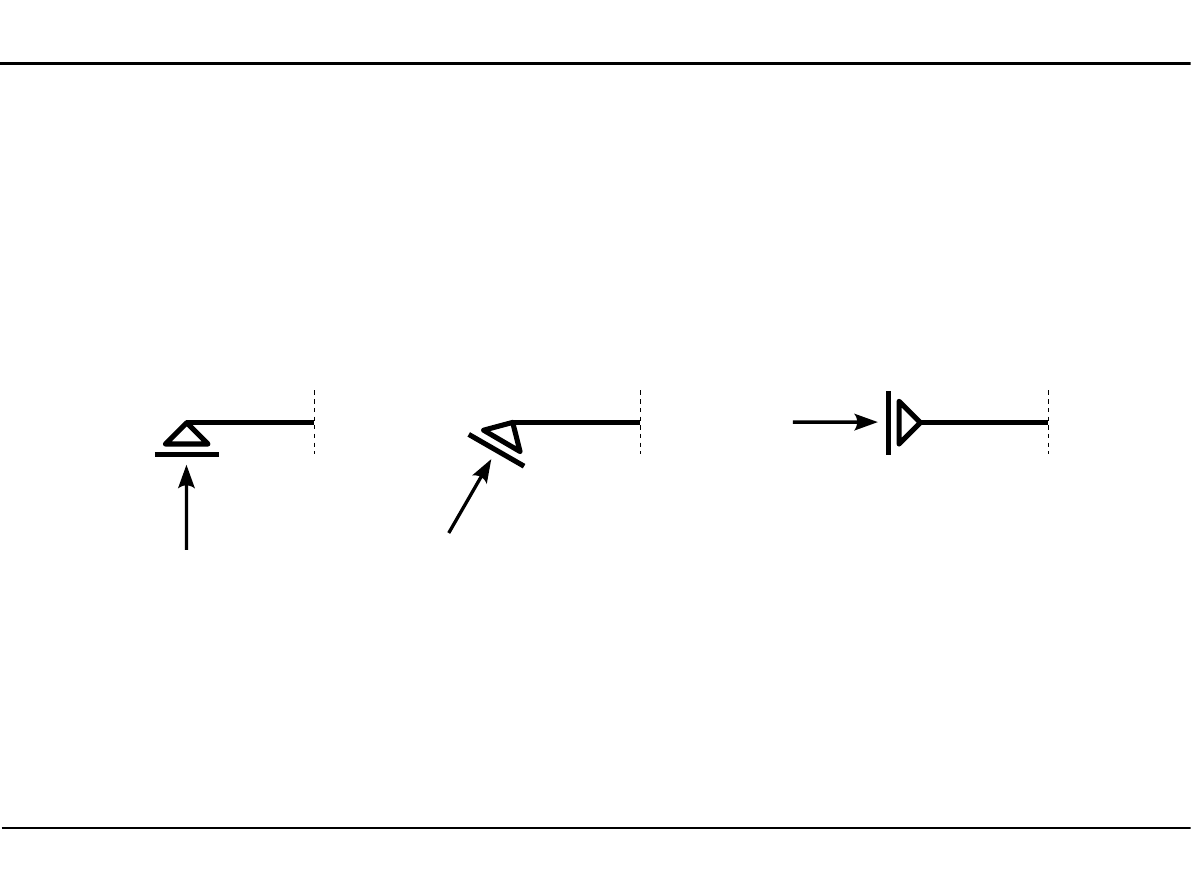
Reakcja na podporze przegubowo-przesuwnej
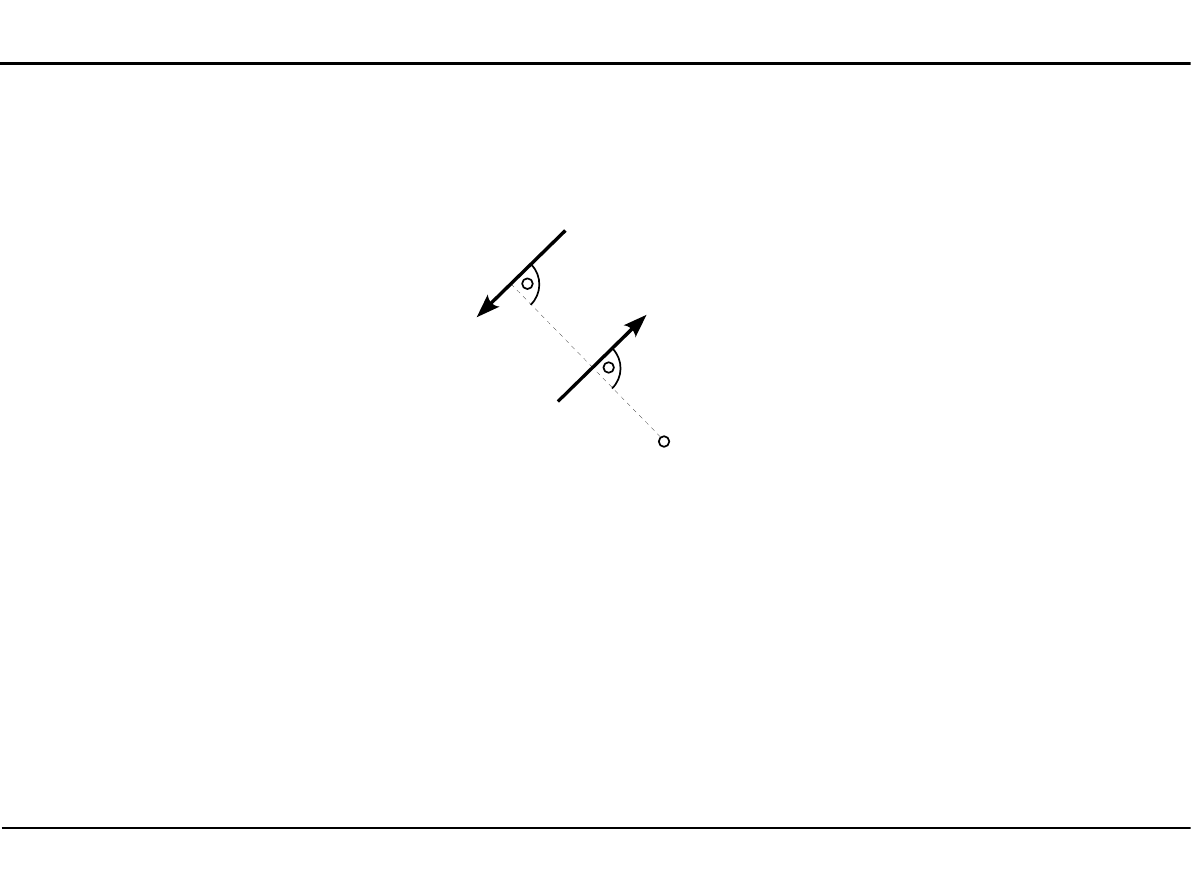
Na podporze przegubowo-przesuwnej działa reakcja, której kierunek jest prostopadły
do kreski oznaczającej tę podporę.
R
R
R
Dr inż. Janusz Dębiński
24
5. Analiza statyczna płaskich układów prętowych
5.2. Analiza statyczna
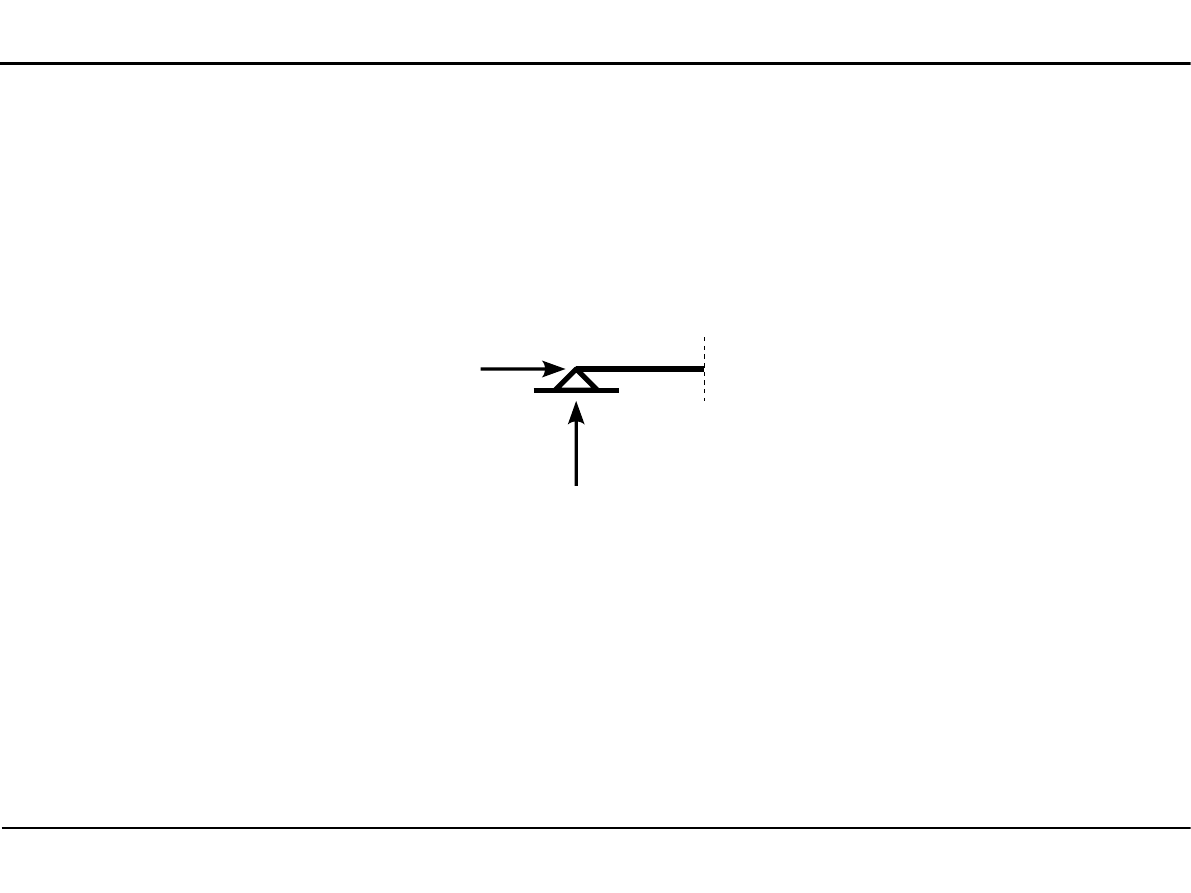
Reakcje na podporze przegubowo-nieprzesuwnej
V
H
Na podporze tej działają dwie składowe składowe reakcje: pozioma H oraz pionowa V.
Dr inż. Janusz Dębiński
25
5. Analiza statyczna płaskich układów prętowych
5.2. Analiza statyczna
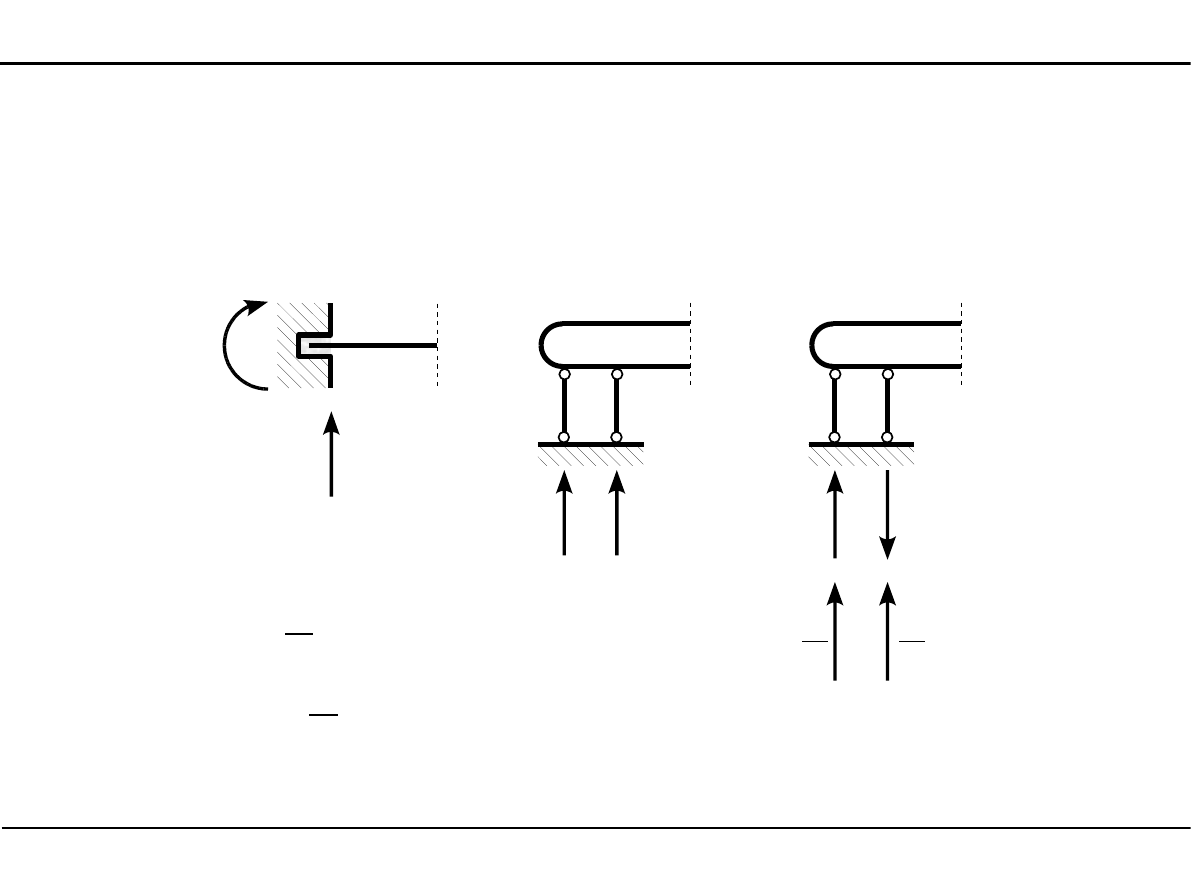
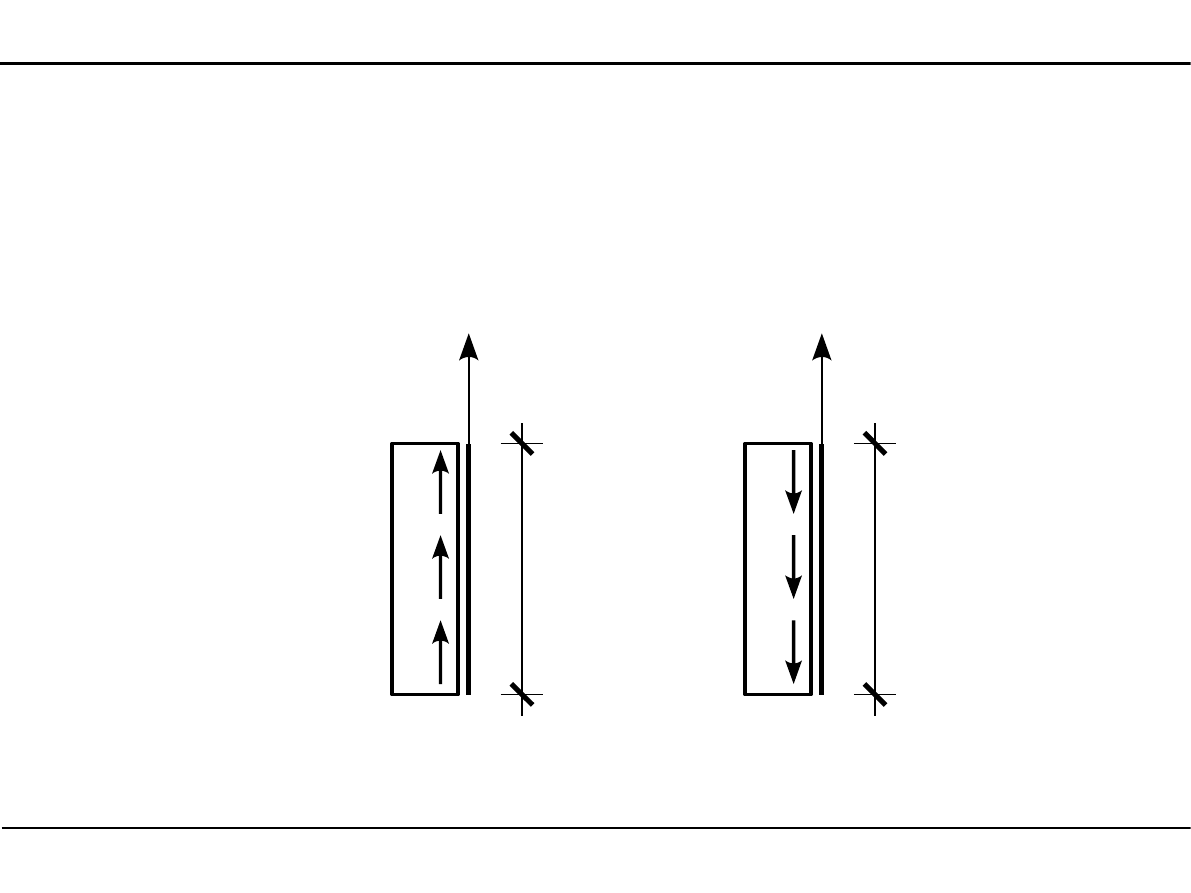
Reakcje na podporze teleskopowej
1
2
1
2
R
1
R
2
R
R
V
2
V
2
{
R
1
=
R V
2
R
2
=−
R V
2
V
M
Dr inż. Janusz Dębiński
26
5. Analiza statyczna płaskich układów prętowych
5.2. Analiza statyczna
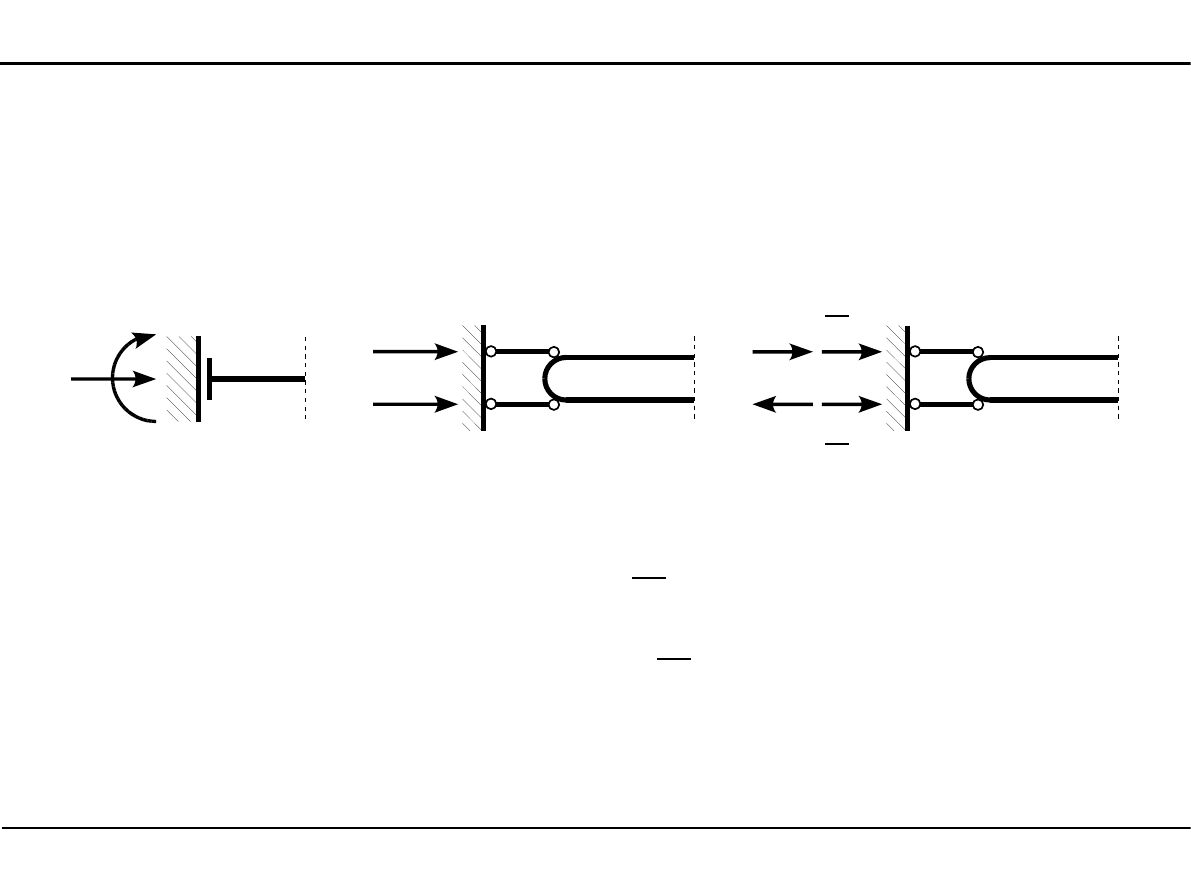
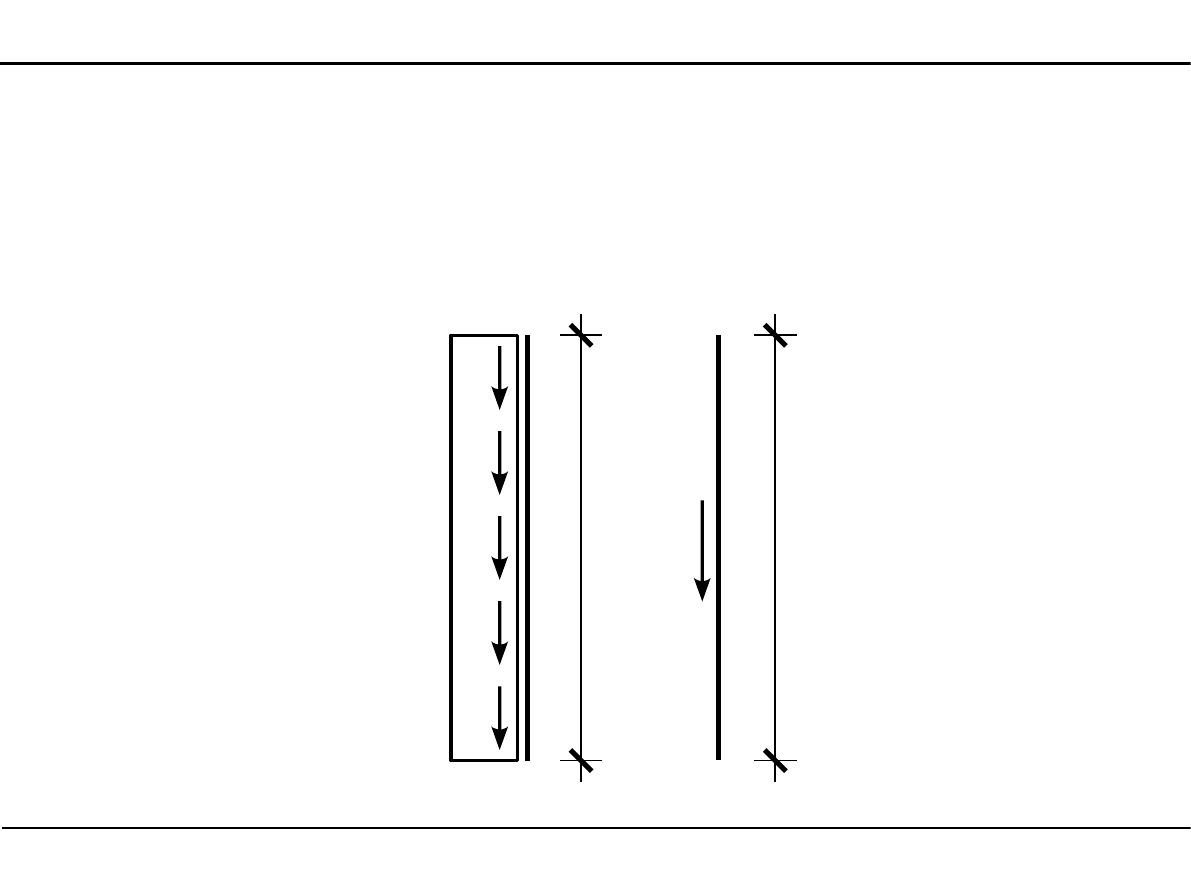
Reakcje na podporze ślizgowej
1
2
1
2
R
1
R
2
R
R
H
2
H
2
H
M
{
R
1
=
R H
2
R
2
=−
R H
2
Dr inż. Janusz Dębiński
27
5. Analiza statyczna płaskich układów prętowych
5.2. Analiza statyczna
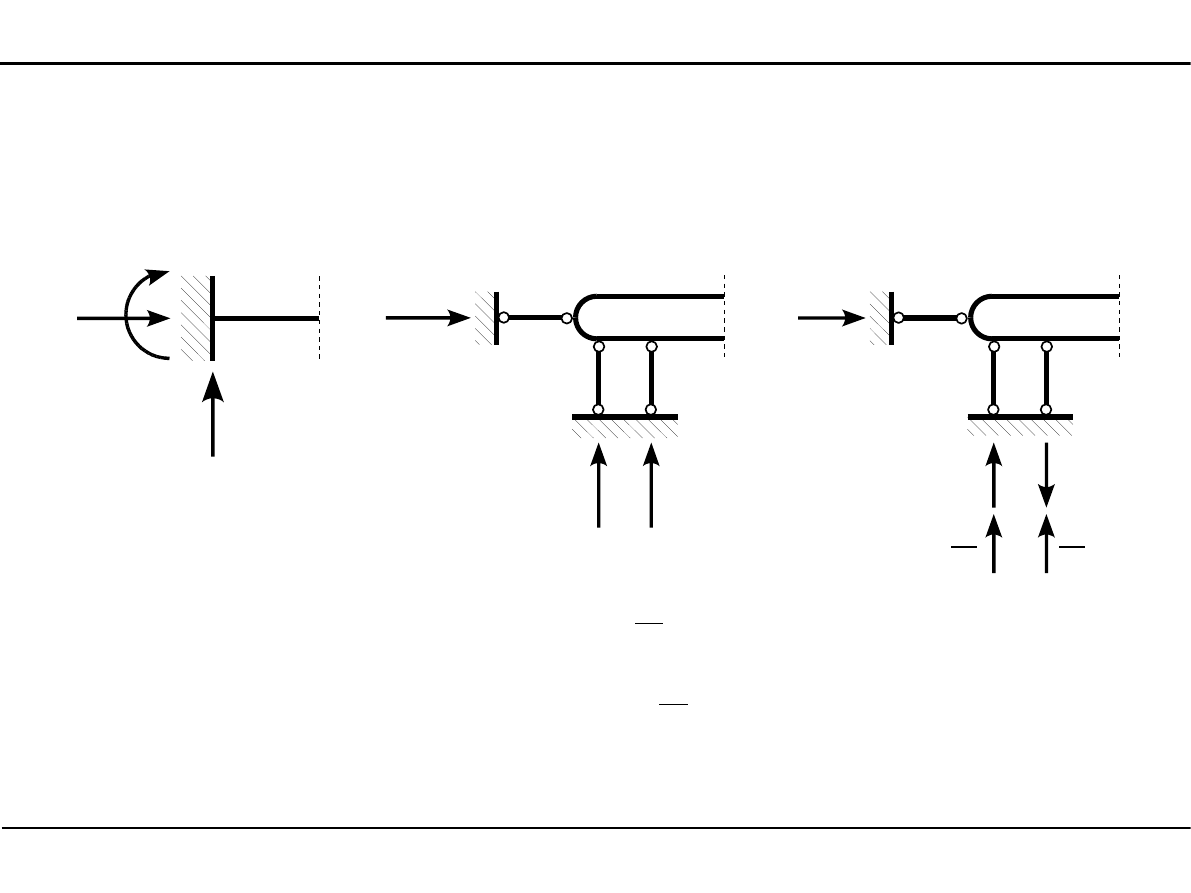
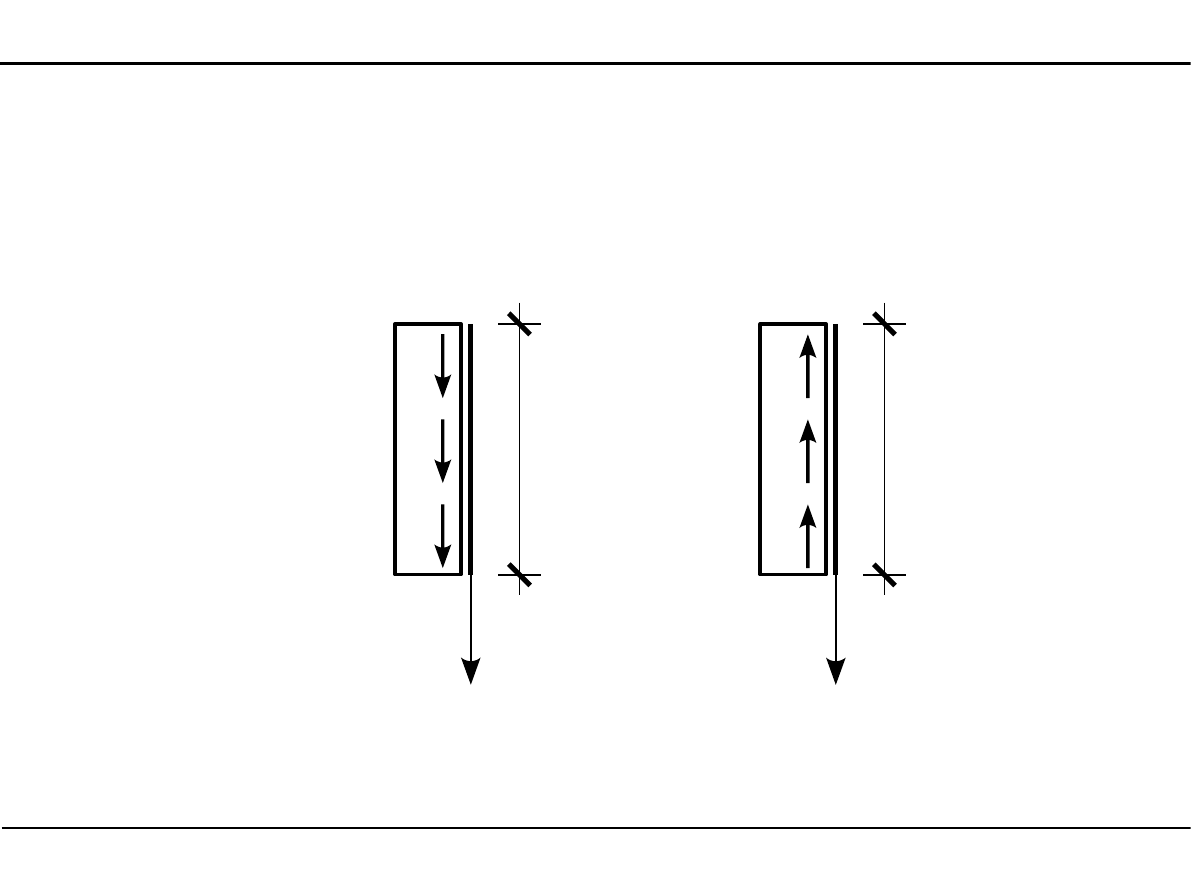
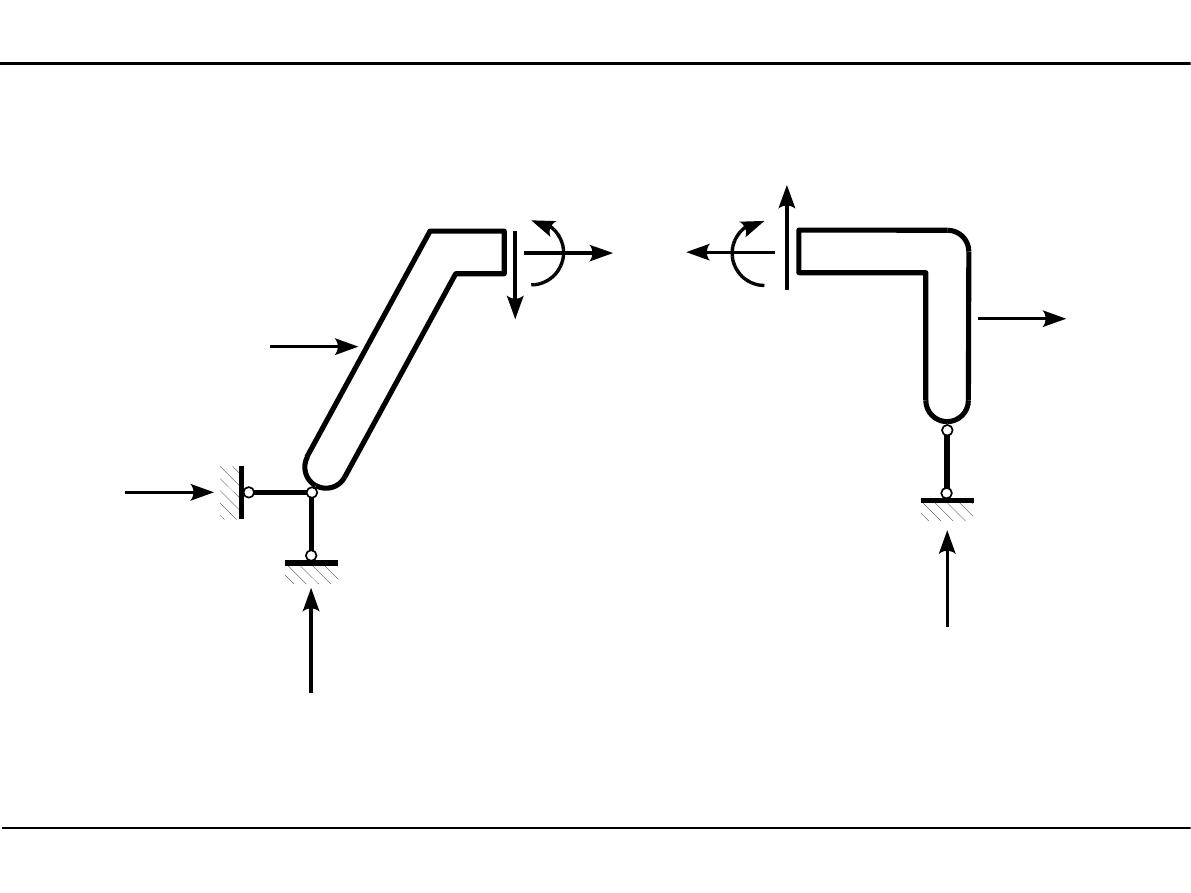
Reakcje w utwierdzeniu
1
2
1
2
R
1
R
2
H
H
R
R
V
2
V
2
V
H
M
{
R
1
=
R V
2
R
2
=−
R V
2
Dr inż. Janusz Dębiński
28
5. Analiza statyczna płaskich układów prętowych
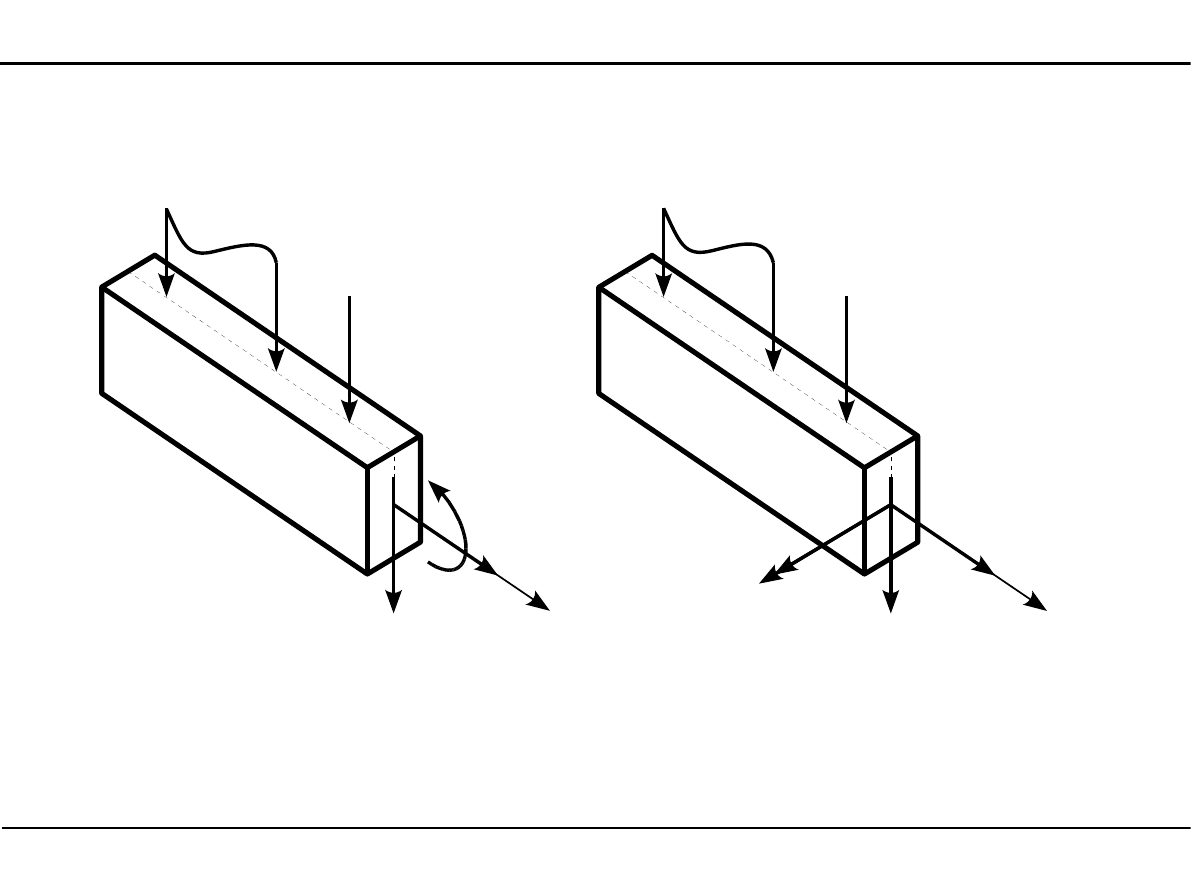
5.3. Obciążenia prętów
Siła i moment obrotowy
Siłą będziemy obciążać wszystkie rodzaje płaskich konstrukcji prętowych.
Jednostką siły jest Niuton [N].
W niniejszym kursie Mechaniki ogólnej będziemy używać wielokrotności kiloniutona [kN].
Momentem obrotowym będziemy obciążać belki, ramy i łuki płaskie.
Jest on równoważny parze sił.
Jednostką momentu obrotowego jest [N∙m], w niniejszym kursie Mechaniki ogólnej
będziemy używać wielokrotności [kN∙m].
M
M
P
P
P
P
Dr inż. Janusz Dębiński
29
5. Analiza statyczna płaskich układów prętowych
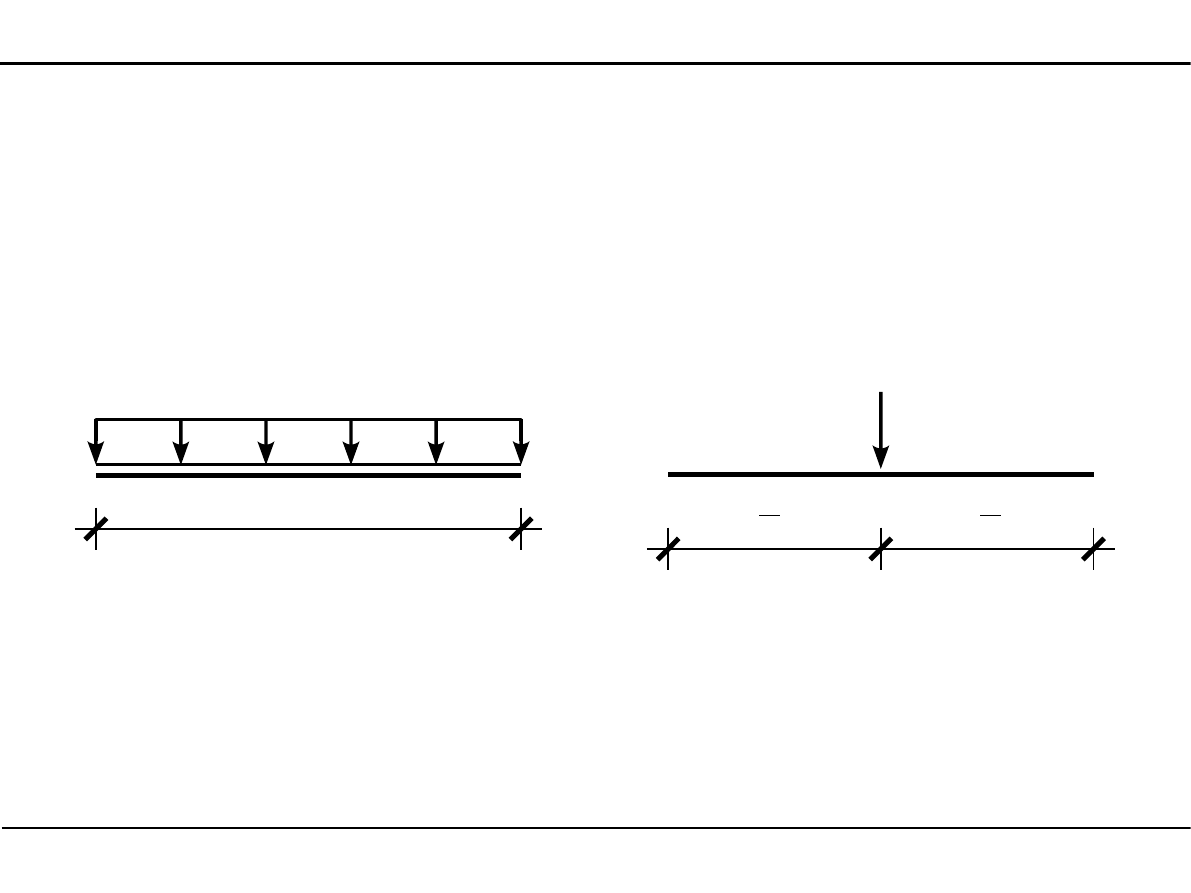
5.3. Obciążenia prętów
Obciążenie ciągłe równomiernie rozłożone prostopadłe do osi pręta
Jednostką tego obciążenia jest N/m, w niniejszym kursie Mechaniki ogólnej będziemy
używać kN/m.
A
B
L
q
A
B
q∙L
L
2
L
2
Siła wypadkowa z obciążenia ciągłego q ma ten sam zwrot co to obciążenie.
Dr inż. Janusz Dębiński
30
5. Analiza statyczna płaskich układów prętowych
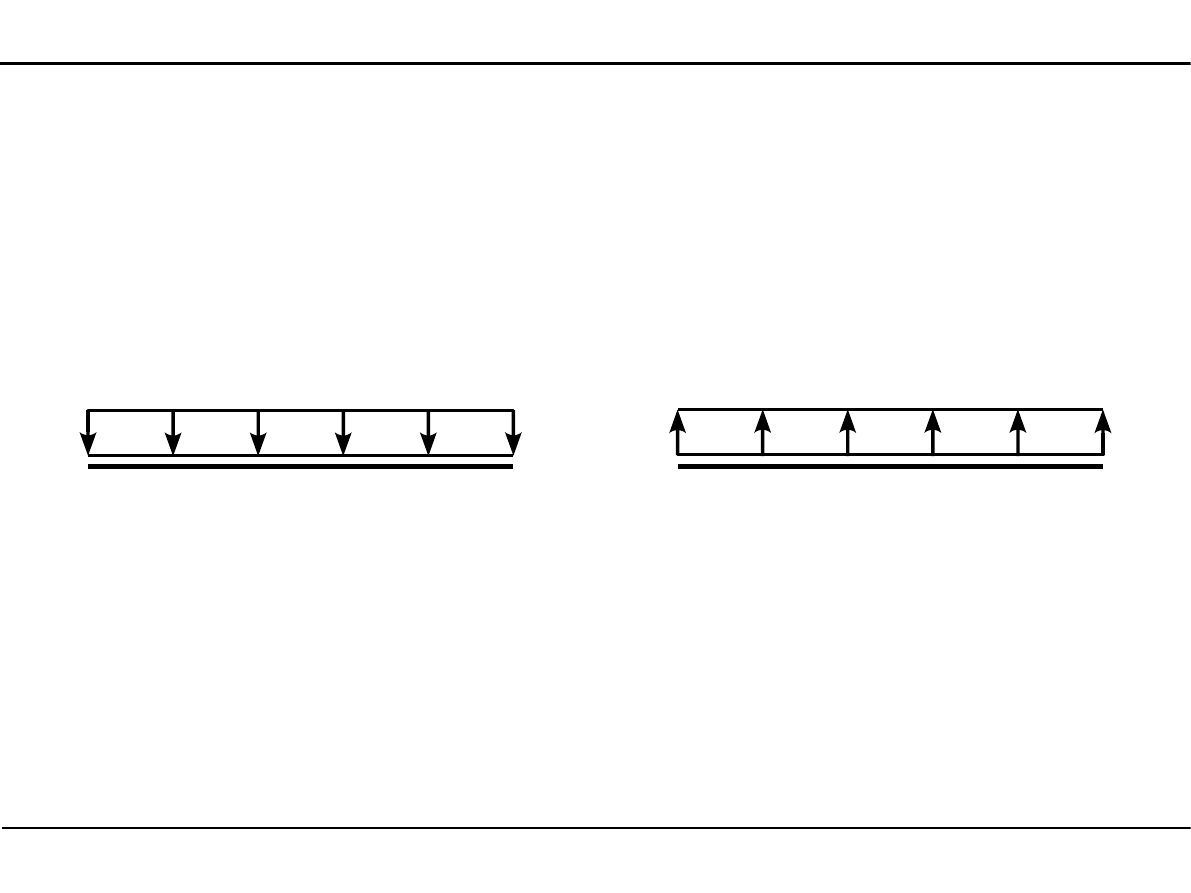
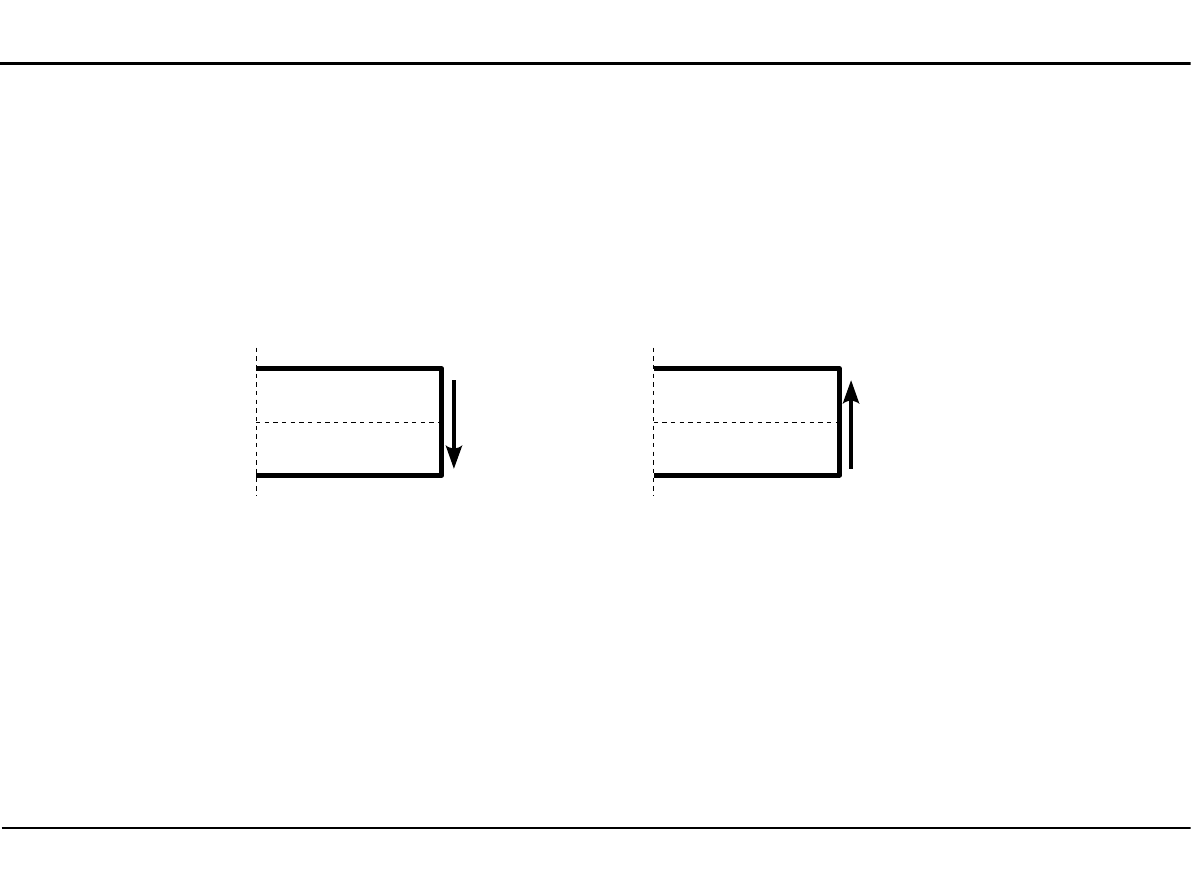
5.3. Obciążenia prętów
Obciążenie ciągłe równomiernie rozłożone prostopadłe do osi pręta
Dodatnie obciążenie q będzie w prętach poziomych działało w dół.
A
B
q > 0
A
B
q < 0
Dr inż. Janusz Dębiński
31
5. Analiza statyczna płaskich układów prętowych
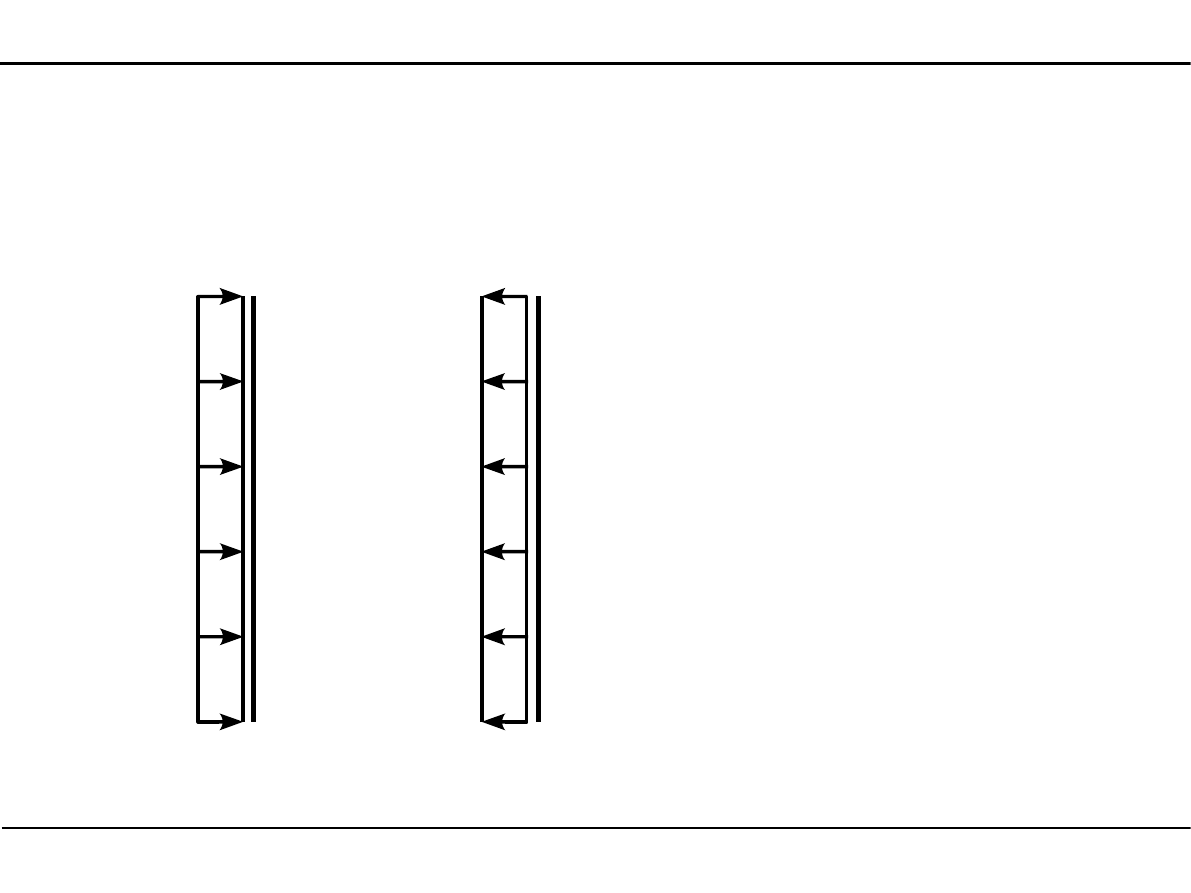
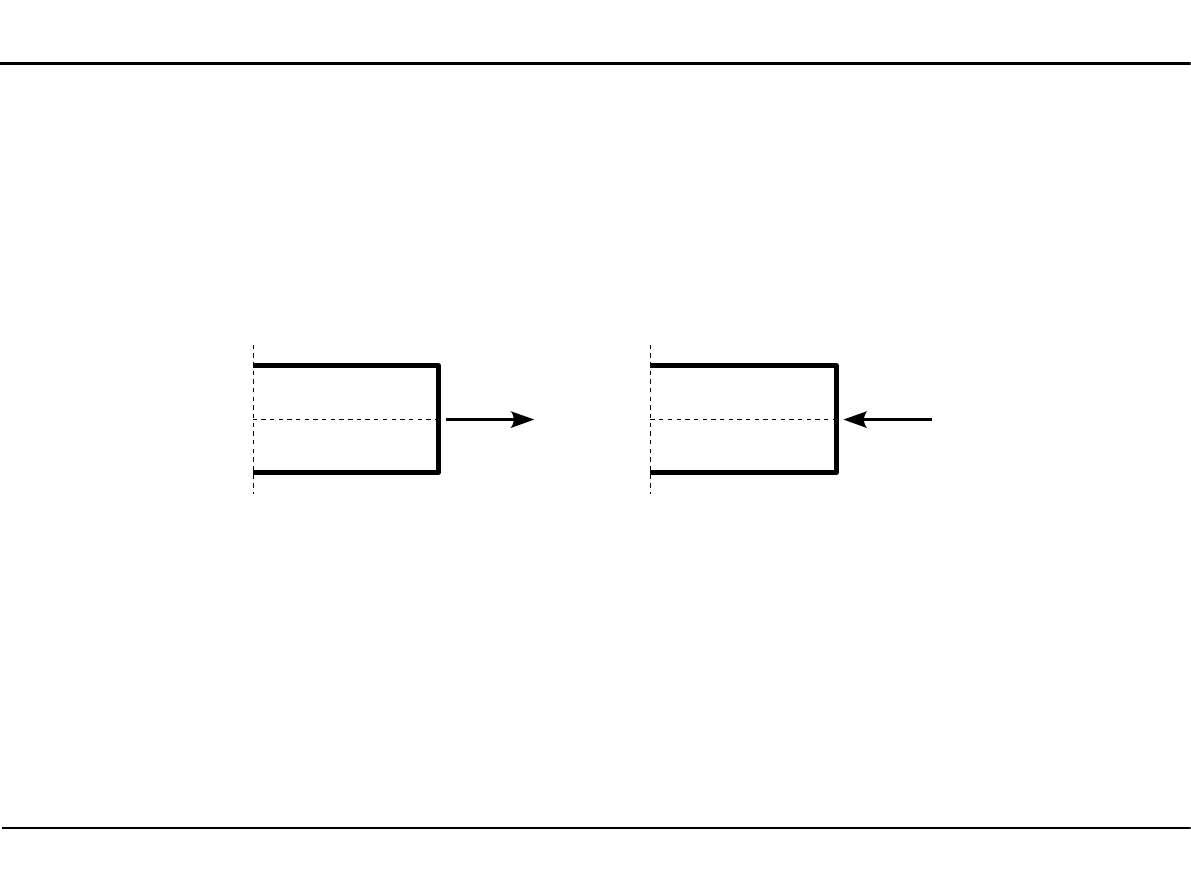
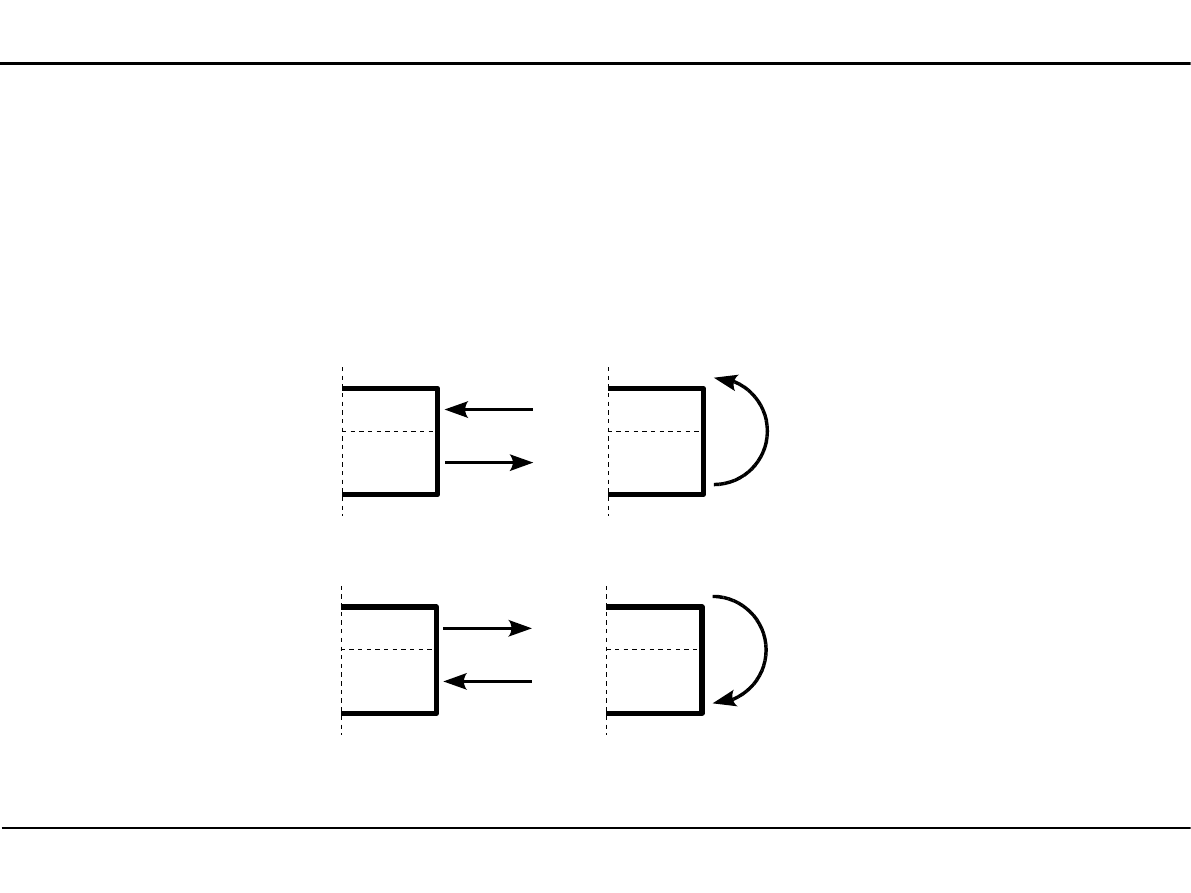
5.3. Obciążenia prętów
Obciążenie ciągłe równomiernie rozłożone prostopadłe do osi pręta
Dodatnie obciążenie q będzie w prętach
pionowych działało w prawo.
A
B
q > 0
A
B
q < 0
Dr inż. Janusz Dębiński
32
5. Analiza statyczna płaskich układów prętowych
5.3. Obciążenia prętów
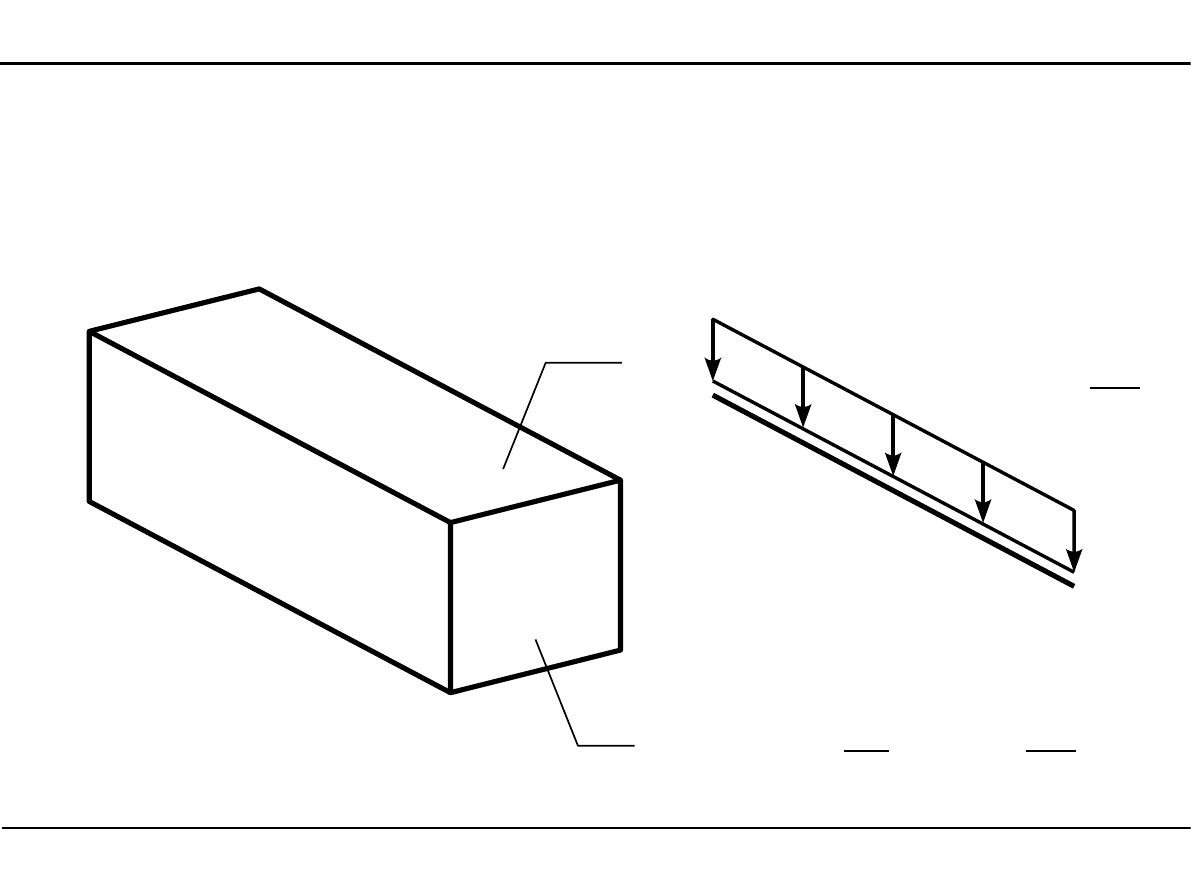
Obciążenie ciągłe równomiernie rozłożone prostopadłe do osi pręta
Ciężar własny - siła ciężkości działająca
na jednostkę objętości.
Wyrażony w N/m
3
. Najczęściej używaną
jednostką jest kN/m
3
.
[
kN
m
3
]
q=⋅A
γ
A
A - pole powierzchni przekroju
pręta.
q
[
N
m
3
]
⋅
[
m
2
]
=
[
kN
m
]
Dr inż. Janusz Dębiński
33
5. Analiza statyczna płaskich układów prętowych
5.3. Obciążenia prętów
Obciążenie ciągłe równomiernie rozłożone równoległe do osi pręta
Jednostką tego obciążenia jest N/m, w niniejszym kursie Mechaniki ogólnej będziemy
używać kN/m.
L
h
L
h∙L
Dr inż. Janusz Dębiński
34
5. Analiza statyczna płaskich układów prętowych
5.3. Obciążenia prętów
Obciążenie ciągłe równomiernie rozłożone równoległe do osi pręta
Dodatnie obciążenie h będzie działało zgodnie ze zwrotem osi X.
x
X
h > 0
x
X
h < 0
Dr inż. Janusz Dębiński
35
5. Analiza statyczna płaskich układów prętowych
5.3. Obciążenia prętów
Obciążenie ciągłe równomiernie rozłożone równoległe do osi pręta
Dodatnie obciążenie h będzie działało zgodnie ze zwrotem osi X.
x
X
h > 0
x
X
h < 0
Dr inż. Janusz Dębiński
36
5. Analiza statyczna płaskich układów prętowych
5.4. Siły przekrojowe
I
1
2
3
P
1
P
2
R
1
R
2
R
3
Rama płaska znajduje się w równowadze.
Dr inż. Janusz Dębiński
37
5. Analiza statyczna płaskich układów prętowych
5.4. Siły przekrojowe
P
2
R
1
I
1
2
R
2
P
1
I
3
R
3
N
N
N - siła normalna
T
T
T - siła poprzeczna (tnąca)
M
M
M - moment zginający
Dr inż. Janusz Dębiński
38
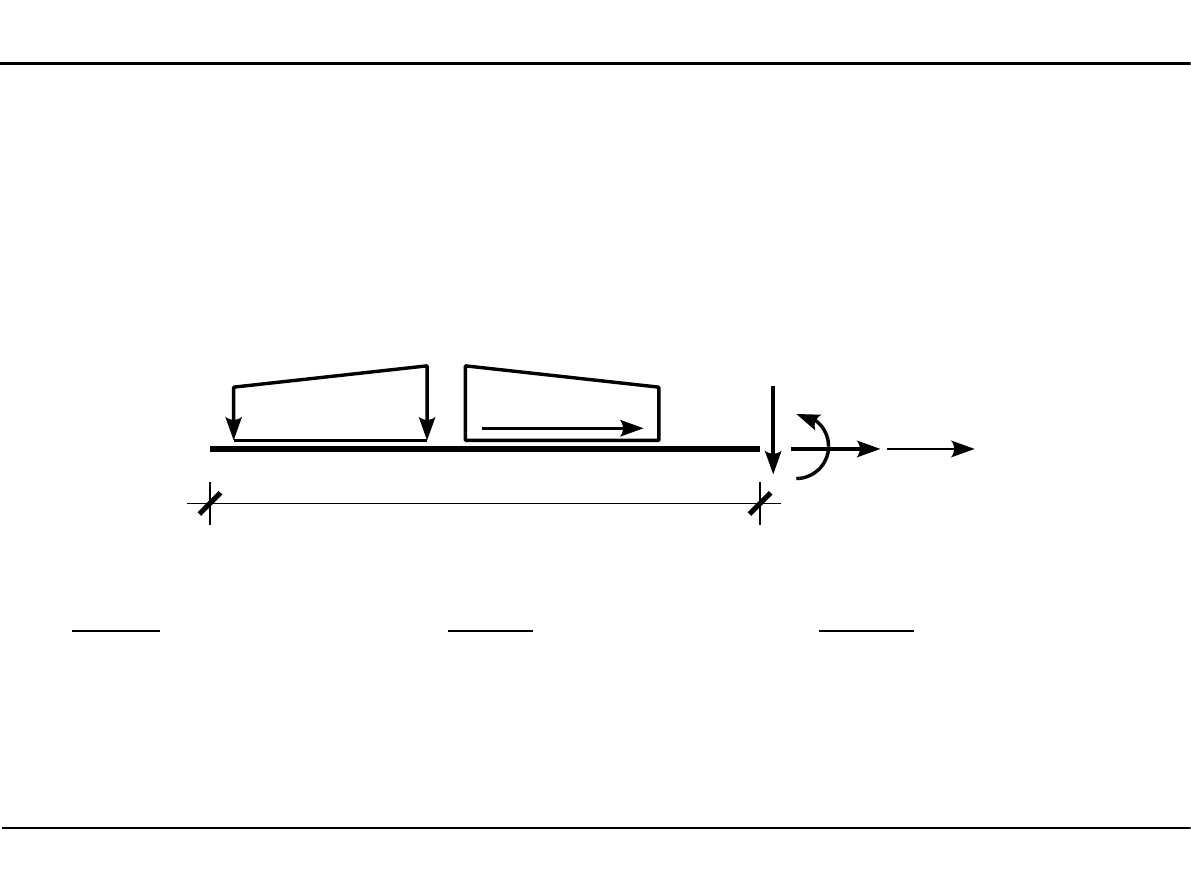
5. Analiza statyczna płaskich układów prętowych
5.4. Siły przekrojowe
X
q(x)
P
N
T
M
P
X
N
T
q(x)
M
Dr inż. Janusz Dębiński
39
5. Analiza statyczna płaskich układów prętowych
5.4. Siły przekrojowe
Zasady znakowania sił przekrojowych
Siła normalna jest dodatnia, jeżeli rozciąga ona pręt.
N>0
N<0
Dr inż. Janusz Dębiński
40
5. Analiza statyczna płaskich układów prętowych
5.4. Siły przekrojowe
Zasady znakowania sił przekrojowych
Siła poprzeczna jest dodatnia, jeżeli kręci ona odciętą częścią pręta
zgodnie z ruchem wskazówek zegara.
T>0
T<0
Dr inż. Janusz Dębiński
41
5. Analiza statyczna płaskich układów prętowych
5.4. Siły przekrojowe
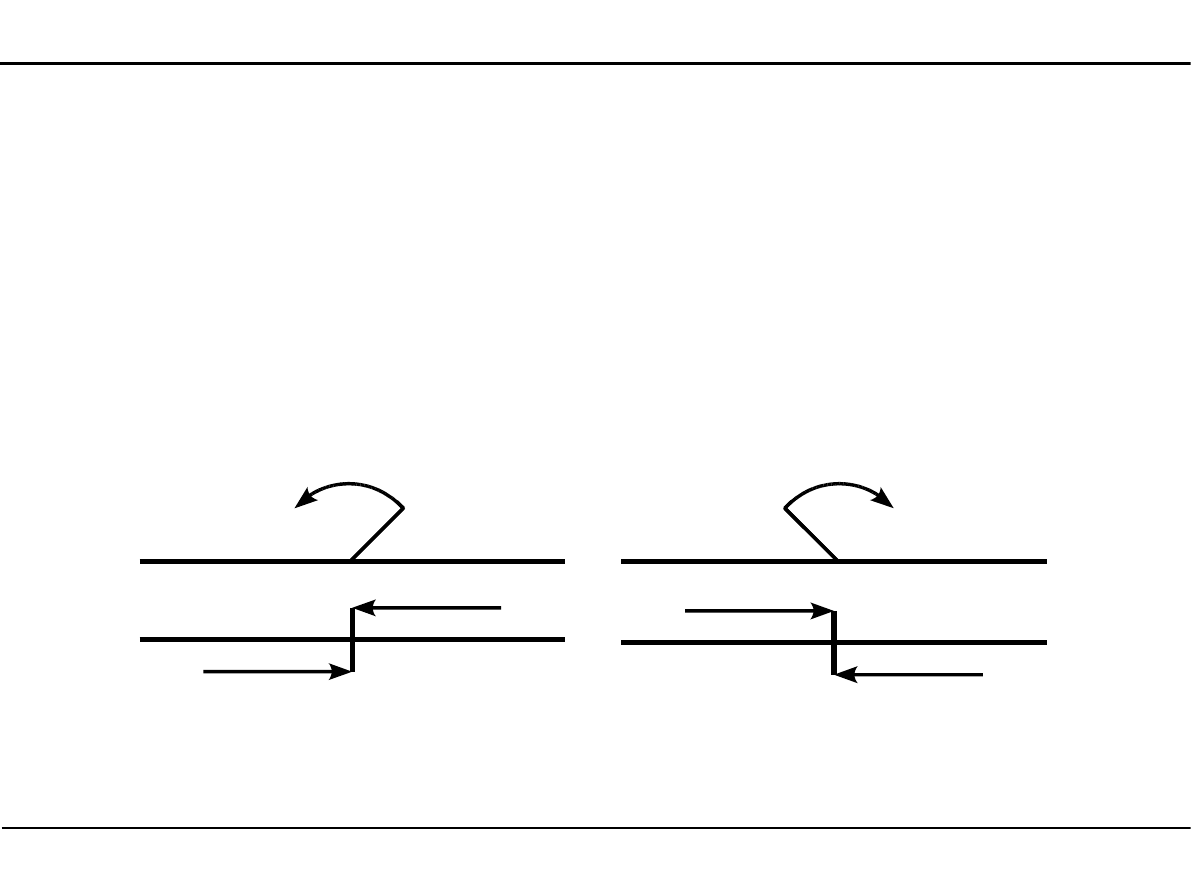
Zasady znakowania sił przekrojowych
Moment zginający jest dodatni, jeżeli rozciąga on dolną część pręta.
W przypadku prętów pionowych, jako dolną część przyjmiemy prawą część pręta.
P
P
M>0
P
P
M>0
Dr inż. Janusz Dębiński
42
5. Analiza statyczna płaskich układów prętowych
5.4. Siły przekrojowe
Równania różniczkowe równowagi
Pomiędzy funkcjami q(x) i h(x), a funkcjami sił przekrojowych istnieją zależności,
które nazywamy równaniami różniczkowymi równowagi.
x
q(x)
h(x)
X
N(x)
T(x)
M(x)
dN
x
dx
=
N '
x
=−
h
x
dT
x
dx
=
T '
x
=−
q
x
dM
x
dx
=
M '
x
=
T
x
Dr inż. Janusz Dębiński
43
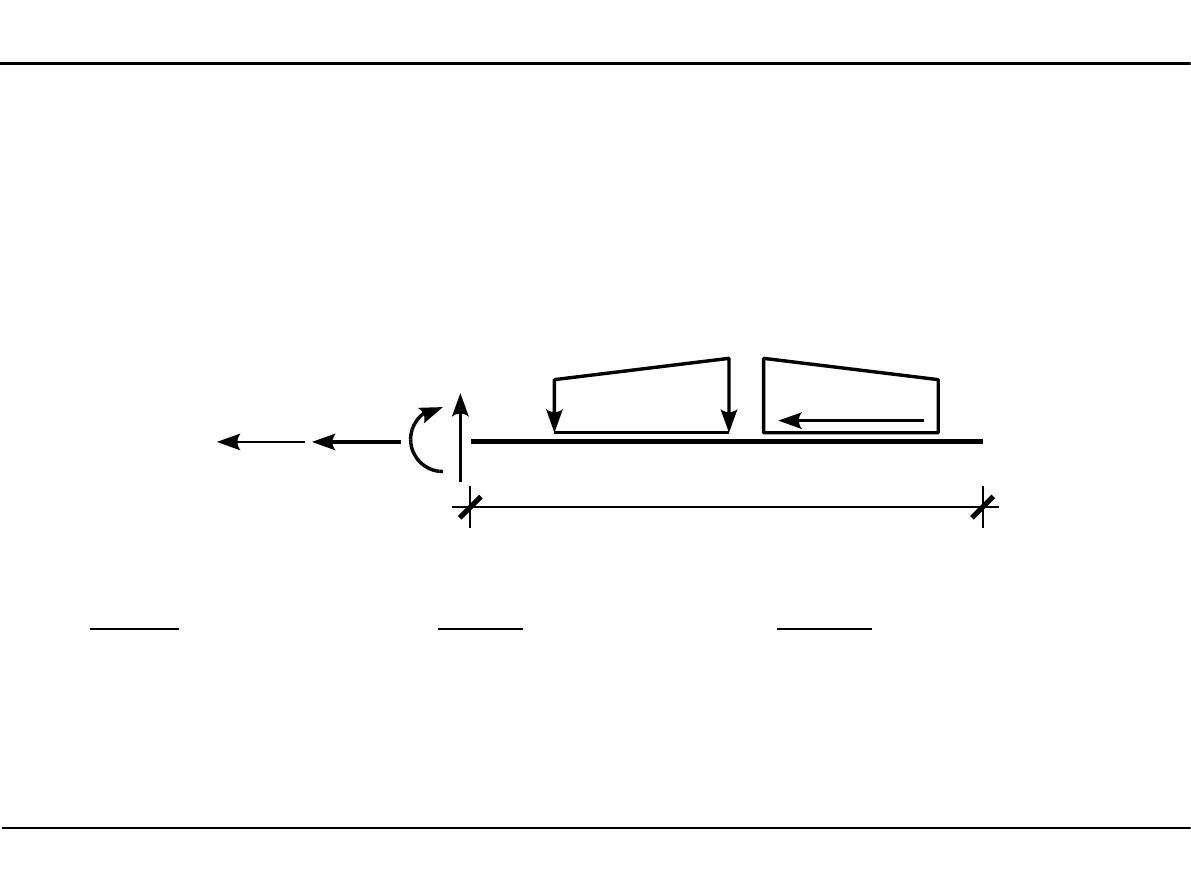
5. Analiza statyczna płaskich układów prętowych
5.4. Siły przekrojowe
Równania różniczkowe równowagi
Równania różniczkowe równowagi dla osi X zwróconej w lewo.
x
q(x)
h(x)
X
N(x)
T(x)
M(x)
dN
x
dx
=
N '
x
=−
h
x
dT
x
dx
=
T '
x
=
q
x
dM
x
dx
=
M '
x
=−
T
x
Dr inż. Janusz Dębiński
44
5. Analiza statyczna płaskich układów prętowych
5.4. Siły przekrojowe
Wykresy sił przekrojowych
Wartości sił przekrojowych zaznaczamy na ich wykresach. Stosujemy wtedy następujące zasady:
w kratownicach na poszczególnych prętach piszemy wartość bezwzględną siły normalnej,
a strzałką rysowaną od węzła zaznaczamy siłę normalną rozciągającą,
strzałką do węzła siłę normalną ściskającą
w belkach i ramach płaskich wykresy rysujemy na ich osiach
na wykresach siły normalnej i poprzecznej oznaczamy ich wartości dodatnie oraz ujemne
dodatnie wartości siły normalnej i poprzecznej w belkach i łukach płaskich rysujemy na górze
w ramach płaskich dodatnie wartości siły normalnej i poprzecznej rysujemy tak,
aby wykresy były czytelnie i jak najmniej nakładały się na siebie
wykres momentu zginającego rysujemy po stronie rozciąganej
i wpisujemy jego wartość bezwzględną.
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
- Slajd 33
- Slajd 34
- Slajd 35
- Slajd 36
- Slajd 37
- Slajd 38
- Slajd 39
- Slajd 40
- Slajd 41
- Slajd 42
- Slajd 43
- Slajd 44
Wyszukiwarka
Podobne podstrony:
3 UGIECIA plaski id 34174 Nieznany (2)
Mit plaskiego toru lotu id 3032 Nieznany
kratownice plaskie id 250300 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
więcej podobnych podstron