101
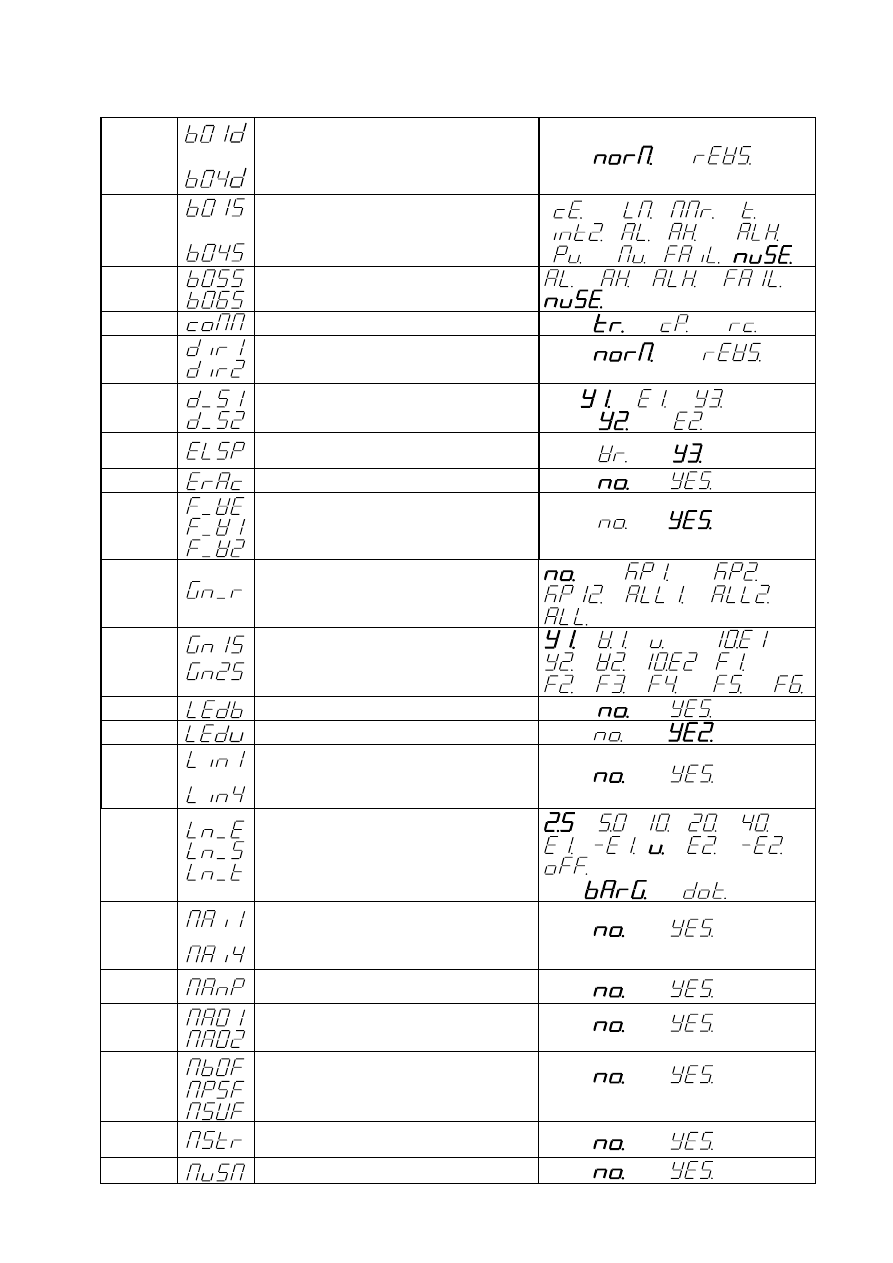
B01D
Kierunek wyjścia binarnego B01, ..., B04
. . .
. . .
(napięciowego)
B04D
B01S
. . .
. . .
Sygnał na wyjściu B01, ..., B04
B04S
B05S
B06S
Sygnał na wyjściu B05, B06 (przekaźniko-
wym) dla sterowania ciągłego
(OUT=CONT)
COMM
Tryb komunikacji (nadawanie, odbiór)
DIR1
DIR2
Kierunek sterowania bloków PID
1
, PID
2
D_S1
D_S2
Sygnał toru różniczkowania D w PID
1
, PID
2
ELSP
Zewnętrzna wielkość zadana (jeśli nie z
komputera)
ERAC
Potwierdzenie gotowości ER (przycisk I/E)
F_WE
F_W1
F_W2
Śledzenie faktycznej wielkości zadanej w
przez zadajnik w
e
, w
1
, w
2
GN_R
Zakres programowej zmiany nastaw (gain s.)
GN1S
GN2S
Sygnał programowej zmiany nastaw (gain)
w bloku PID
1
, PID
2
LEDB
Led-y I, A, M z pulsowaniem
LEDU
Sygnalizacja sterowania u na LED-ach +, −
LIN1
. . .
LIN4
. . .
Linearyzacja wejścia analogowego
AI1, ..., AI4
LN_E
LN_S
LN_T
Zakres wskazywania błądu e na linijce
Sygnał wskazywany na linijce
Typ wskazywania
MAI1
. . .
MAI4
. . .
Sterowanie ręczne przy uszkodzeniu wejścia
analogowego AI1, ..., AI4
MANP
Priorytet sterowania ręcznego Man nad T,
DDC i RDN
MA01
MA02
Sterowanie ręczne przy uszkodzeniu wyjścia
analogowego A01, A02
MB0F
MPSF
MSVF
Sterowanie ręczne w razie przeciążenia:
- wyjść binarnych
- zasilacza przetworników i inicjatorów
- siłownika
J.w.
J.w.
MSTR
Regulator podstawowy pary redundancyjnej
(master)
MuSM
Sterowanie ręczne przy niezgodności u, SM

102
Wyszukiwarka
Podobne podstrony:
Ćwiczenie 13B
13b
5 1 13b CCNA1 Laboratorium pl
lab 5 1 13b
Ekon Mat Wyk Równ 13b 2015
13b
deon, 1c 2b 3b 4d 5a 6c 7d 8a 9b 10d 11b 12a 13b 14d 15c 16 b 17b 18d 19c 20b 21d 22d 23a 24a 25a 26
Psychologia społeczna, 13b, TEORIA DYSONANSU POZNAWCZEGO W WERSJI ORYGINALNEJ:
13b
KOLOSY, Kolokwium-4, odpA: 1c,2a,3d,4a,5b,6a,7a,8b,9c,10c,11a,12c,13b,14b,15a
13B Metale niezelazne stopy Cui Nieznany
13b Nowe materiały pokryciowe
13b Równowaga ciecz kryształ w układach dwuskładnikowych (b)id 15112 ppt
13b KONTROLA NAD REALIZACJĄ OBOWIĄZKÓW PRZEZ PŁATNIKA SKŁADEK (2)
kintek explorer instructions v2 0 13b
20 19 05 2014 Ćwiczenie 13B GARAŻ W KOSZTOWEJ rozwiązanieid 21324 ppt
materialy 13b
więcej podobnych podstron