Pytania na egzamin z Mechaniki Ruchu Okrętu (25.05.2012r.)
1. Podaj składniki oporu całkowitego.
Opór całkowity okrętu (bez pracującego pędnika):
R=R
T
+R
AP
+R
AA
R
T
- opór stawiany przez wodę dla gołego kadłuba(bez części wystających)
R
AP
– opór części wystających
R
AA
– opór powietrza
R
T
=R
Fo
(1+k)+R
AP
+R
W
+R
B
+R
TR
+R
A
R
Fo
– opor tarcia ekwiwalentnie płaskiej płyty
1+k - współczynnik kształtu
R
AP
– opór części wystających
R
W
- opór falowy
R
B
- dodatkowy opór ciśnienia wywołany gruszką dziobową
R
TR
– dodatkowy opór ciśnienia wywołany zanurzoną pawężą
R
A
- poprawka uwzgledniająca korelacje okręt model
2. Wymień charakterystyki geometryczne śruby okrętowej.
Charakterystyki geometryczne śruby okrętowej:
- średnica śruby D
- liczba skrzydeł Z
- współczynnik powierzchni wyprostowanej AE/AO
- współczynnik skoku geometrycznego P/D
- współczynnik średnicy piasty d/D
- kształt i nachylenie tworzącej powierzchni śrubowej nominalnej lub powierzchni śrubowej stycznej do
strony cisnącej skrzydła
- rozkład maksymalnych grubości profilów skrzydła
- szerokość profilu b na poszczególnych promieniach
- strzałka ugięcia profilu powierzchni
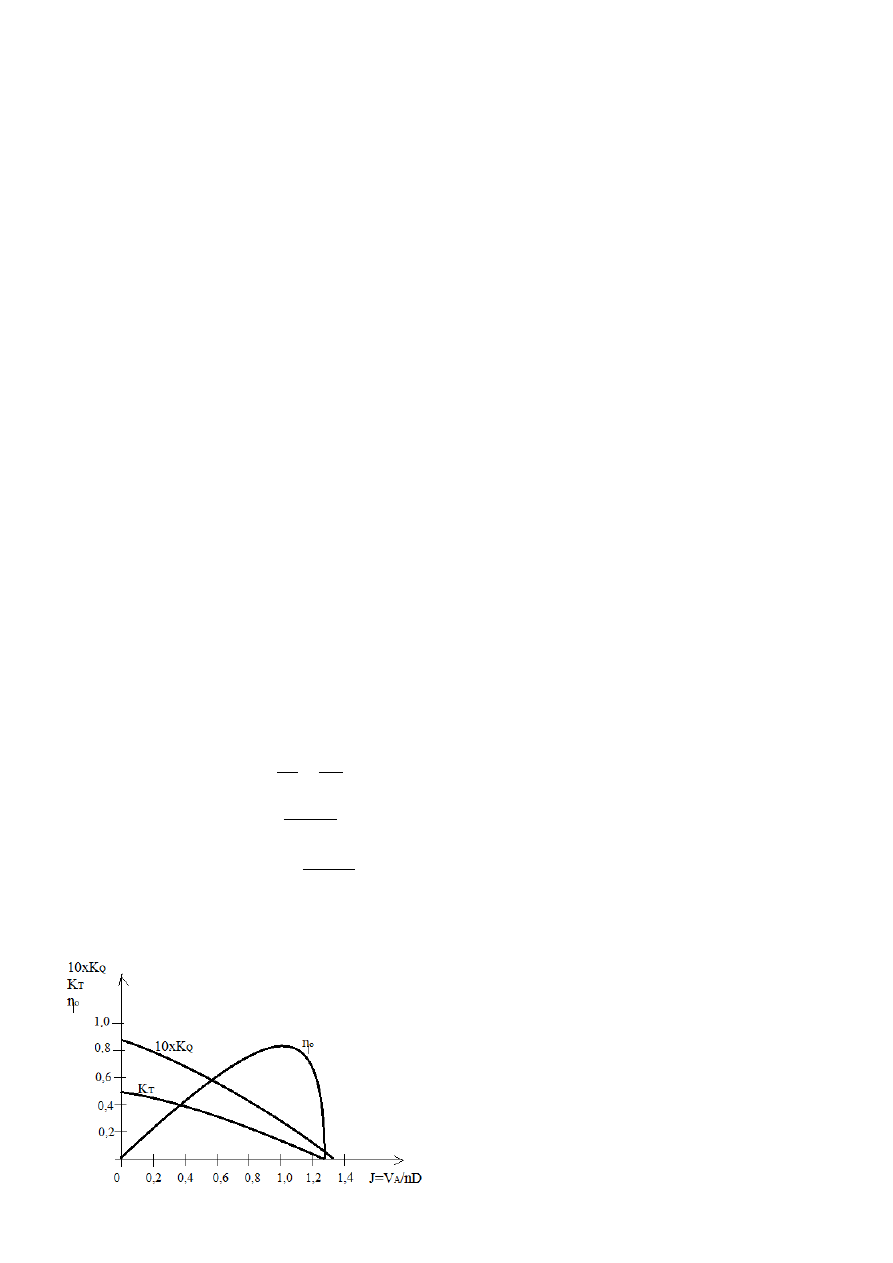
3. Wymień charakterystyki hydrodynamiczne śruby okrętowej i przedstaw je na wykresie (3).
Charakterystyki hydrodynamiczne śruby:
- współczynnik posuwu
nD
V
D
P
J
A
A
- współczynnik naporu
4
2
D
n
T
K
T
- współczynnik momentu
5
2
D
n
Q
K
Q
Zależność współczynników naporu i momentu oraz sprawności śruby od współczynnika posuwu zwana
charakterystyką hydrodynamiczną śruby pokazana została na poniższym wykresie: (śruba wageningen B-
3-50 P/D=1,2)
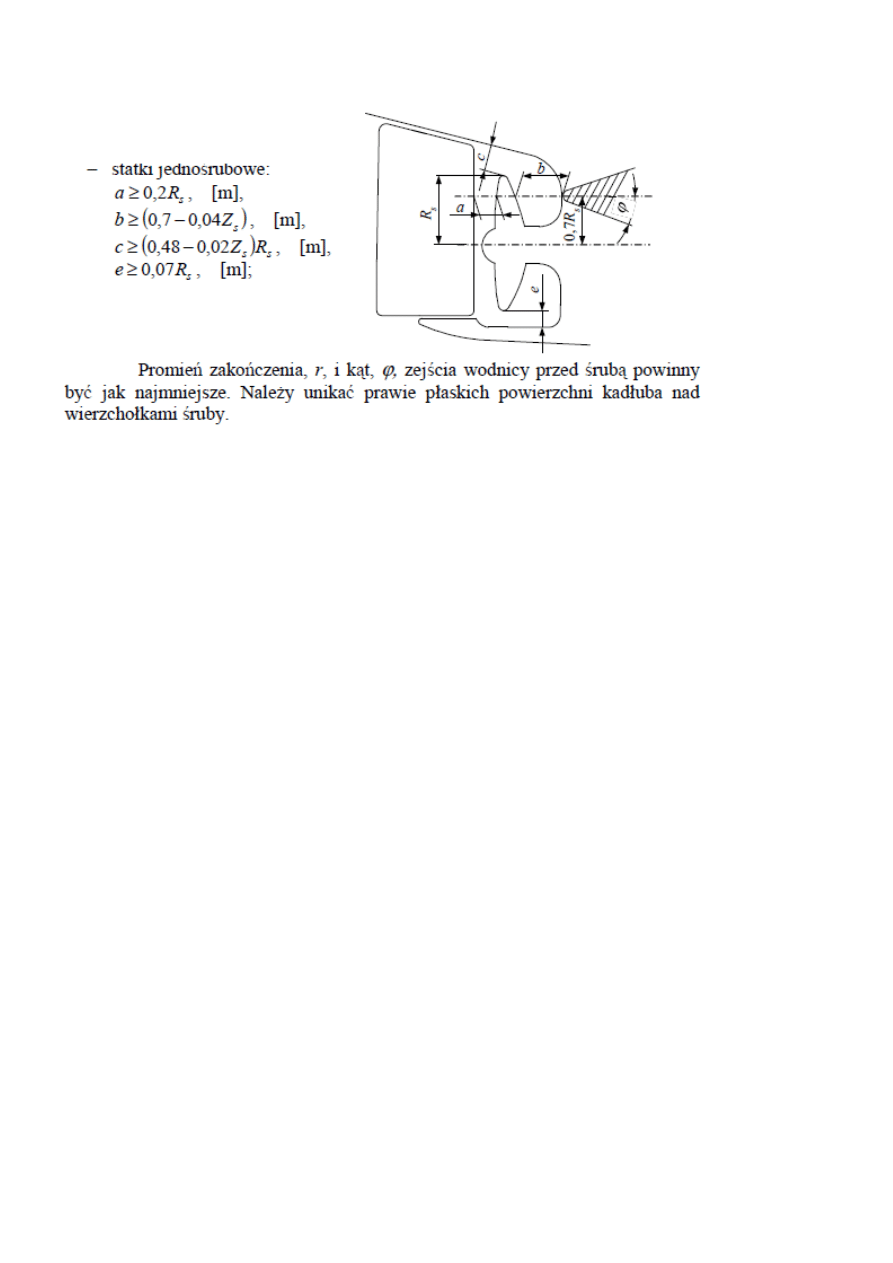
4. Jak(wg PRS) powinna być położona śruba okrętowa względem kadłuba i płetwy sterowej (dla
jednostki jednośrubowej)?
5. Wymień kilka rodzajów śrub oraz niekonwencjonalnych pędników śrubowych.
Rodzaje śrub:
- śruba okrętowa (tradycyjna ta zwyczajna ) (o skoku stałym i nastawnym)
- śruba w dyszy (z dyszą stałą lub obrotową)
- śruba w pełni kawitująca (superkawitująca)
- śruba tandem (współbieżne i przeciw bieżne)
- śruba z napędem elektrycznym (pędnik azymutalny, podwieszany w gondoli)
- śruboster
- śruba z przecinająca swobodną powierzchnię (SPP) (częściowo zanurzone)
- koło Grima
Przykłady niekonwencjonalnych pędników śrubowych, napędów:
- napęd rotorowy
- napęd cykloidalny (Votth Schneidera)
- koło łopatkowe
- napęd strumieniowy
- strugowodny – magnetyczny
- pump jet - strugowodny
6. Opisz, na czym polega próba cyrkulacji. Podaj jej parametry i wielkości mierzone podczas
próby.
Najbardziej znana próba manewrowa, wykonuje się ją w dobrych warunkach pogodowych. Jej przebieg
jest następujący: przy ruchu okrętu ze stała, znaną prędkością, torem prostoliniowym, ze sterem w
położeniu neutralnym, ster wychyla się o określony kąt i utrzymuje się go w tej pozycji. Okręt zaczyna
poruszać się po torze krzywoliniowym spiralnym, który po krótkim czasie przechodzi w okrąg. W
dalszej fazie cyrkulacji, kiedy siły hydrodynamiczne się
wyrównają tor cyrkulacji przyjmuje kształt koła . Trzy fazy cyrkulacji:
-faza I obejmuje okres od chwili wychylenia steru do ustania przesunięcia w stronę przeciwną
wychylonego steru (Y
H
=Y
R
)
- FAZA II obejmuje okres od chwili zakończenia fazy 1 do rozpoczęcia ustalonej cyrkulacji, tzn od chwili
gdy Y
H
X
H
= Y
R
x
R
w tej fazie ruch odbywa się po spirali w kierunku wychylenia steru
Faza III to ruch ustalony po kole, siły, momenty, prędkości i kąt dryfu są stałe.
W czasie I i II fazy kąt dryfu stale rośnie a prędkość obwodowa maleje.
Parametry używane w próbie cyrkulacji
-Siła napędowa śruby T
N
-opór R
-siła nośna
7. Wymień normowane przez cechy statku.
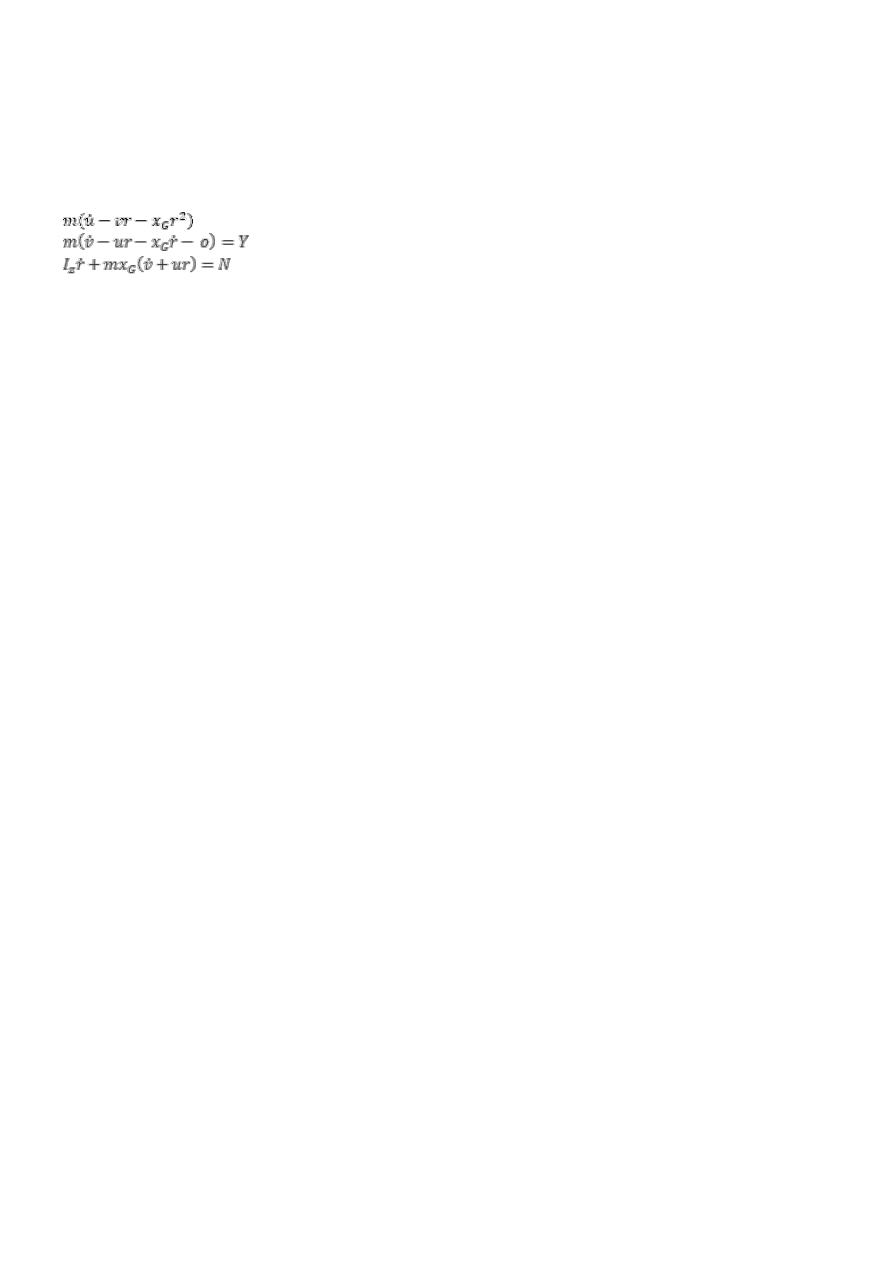
8. Podaj ogólne równania ruchu manewrującego statku. Jakie są metody ich wyznaczania
(wymień)?
Składowe wypadkowej zewnętrznych sił hydromechanicznych działających na manewrujący statek to
X,Y,Z a składowe momentu względem osi x,y,z to K.M.N. Ze względu na założenie ruchu płaskiego
Z=K=M=O. wychodząc z zasady pędu i ogólnych znanych równań ruchu otrzymamy następujące
równanie ruchu
= X
Gdy A=G to x
G
=0
Jeśli ograniczymy się tylko do uwzględnienia wyrazów liniowych tego rozwinięcia to po odrzuceniu
wyrazów nieliniowych lewych stron to otrzymamy model liniowy sterowności statku.
9. Ograniczenie wód – przedstaw klasyczny podział.
Wody ograniczone: wody wewnętrzne, podejścia do portu; dotyczy to obszarów w granicach 0–3 mil
odległości od brzegu lub obszarów płycizn.
10. Zjawiska powstające na wodach ograniczonych.
-ograniczone za głębokość, szerokość długość
-znaczne zmiany poziomu wody
- występują silne wiatry, wysoki stan morza
- duże prawdopodobieństwo ograniczonej widzialności
-duża gęstość ruchu statków
- pojawiają się inne niespodziewane niebezpieczeństwa nawigacyjne, statki poławiające, zalodzenie
morza, rozmieszczenie nowych platform wiertniczych.
11. Uzasadnij, że na niewielkiej głębokości nastąpi osiadanie statku (zasada zachowania
przepływu, równanie Bernoulliego).
12. Narysuj przebieg krzywej oporu w zależności od prędkości i głębokości akwenu.
13. Dla statku o następujących danych:
T=12 m
L=200 m
B=20 m
c
B
=0,65
oblicz wymaganą (wg DNV) powierzchnię steru.
14. Jakie znasz rodzaje sterów strumieniowych? Podaj wzór na napór steru.
Wyszukiwarka
Podobne podstrony:
Mechanika Ruchu Okretu I Odpowiedzi 05 id 291296
Mechanika Ruchu Okretu I Odpowiedzi 06 id 291297
Mechanika Ruchu Okretu I Odpowiedzi 02 id 291294
Mechanika Ruchu Okretu I Odpowiedzi 07 id 291298
Mechanika Ruchu Okretu I Odpowiedzi 05 id 291296
Mechanika Ruchu Okretu I Odpowiedzi 06 id 291297
Mechanika Ruchu Okrętu I, Odpowiedzi 04
Mechanika Ruchu Okrętu I Odpowiedzi 03
Mechanika Ruchu Okretu I Harmonogram id 291291
Mechanika Ruchu Okretu I Harmonogram id 291291
Mechanika Ruchu Okrętu I Ćwiczenie 3 Spr
Mechanika Ruchu Okrętu I, Notatki 03
Mechanika Ruchu Okrętu I Pytania
Mechanika Ruchu Okrętu I Strona tytułowa
Mechanika Ruchu Okrętu I Raport
Mechanika Ruchu Okrętu I Notatki 03
Mechanika techniczna wyklad 01 id 291332
więcej podobnych podstron