1.Stabilność układu automatycznej regulacji to zdolność układu do:
utrzymywania stałych parametrów obiektu po zaniku sygnału zakłócającego
2. W regulatorze PID zwiększono dwa razy stałą czasową Ti (czas całkowania), w wyniku czego:
czas regulacji wydłuży się
3. Proces technologiczny wymaga, aby w pomieszczeniu o kubaturze 18m
3
zachowana była temperatura
40
C
5
C. Najczęściej stosowanym sterownikiem elementów grzejnych będzie:
A. regulator dwustawny
4.Sygnałem pneumatycznym standardowym jest sygnał o wartości z zakresu:
d) 20..100 kPa
5. 34. Czas wyprzedzania, to:
c) stała czasowa członu regulatora PD,
29. Czas zdwojenia, to:
a) stała czasowa regulatora PI
32. Do zalet układów regulacji kaskadowej, w porównaniu z prostymi układami regulacji, należy:
c) znaczny stopień i prędkość tłumienia zakłóceń przez obwód pomocniczy,
33.Regulator typu PI stosuje się gdy:
d) wzmocnienie z regulatorem typu P jest wystarczające do uzyskania żądanej dobroci
regulacji, lecz czas trwania procesu regulacji jest zbyt długi.
27. Regulator typu PD stosuje się gdy:
b) wzmocnienie z regulatorem typu P jest wystarczające,
28. Strojenie to:
c) czynności nastawiania parametrów regulatora,
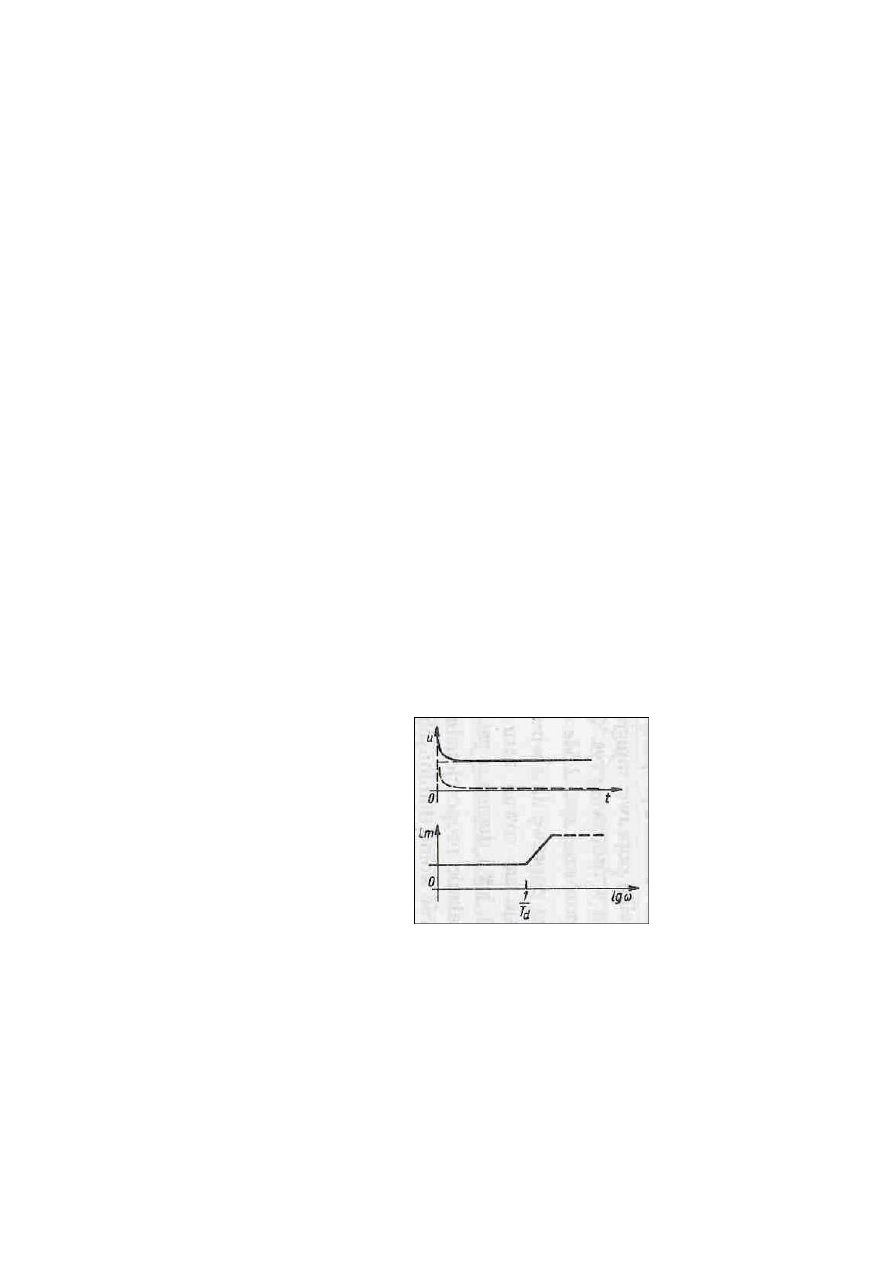
26. Na rys. przedstawiono przebieg odpowiedzi skokowej i charakterystykę logarytmiczną
amplitudowo-fazową:
c) sygnału wyjściowego z regulatora PD,
30. Na rys. przedstawiono przebieg:
c) sygnału wyjściowego z regulatora PI,
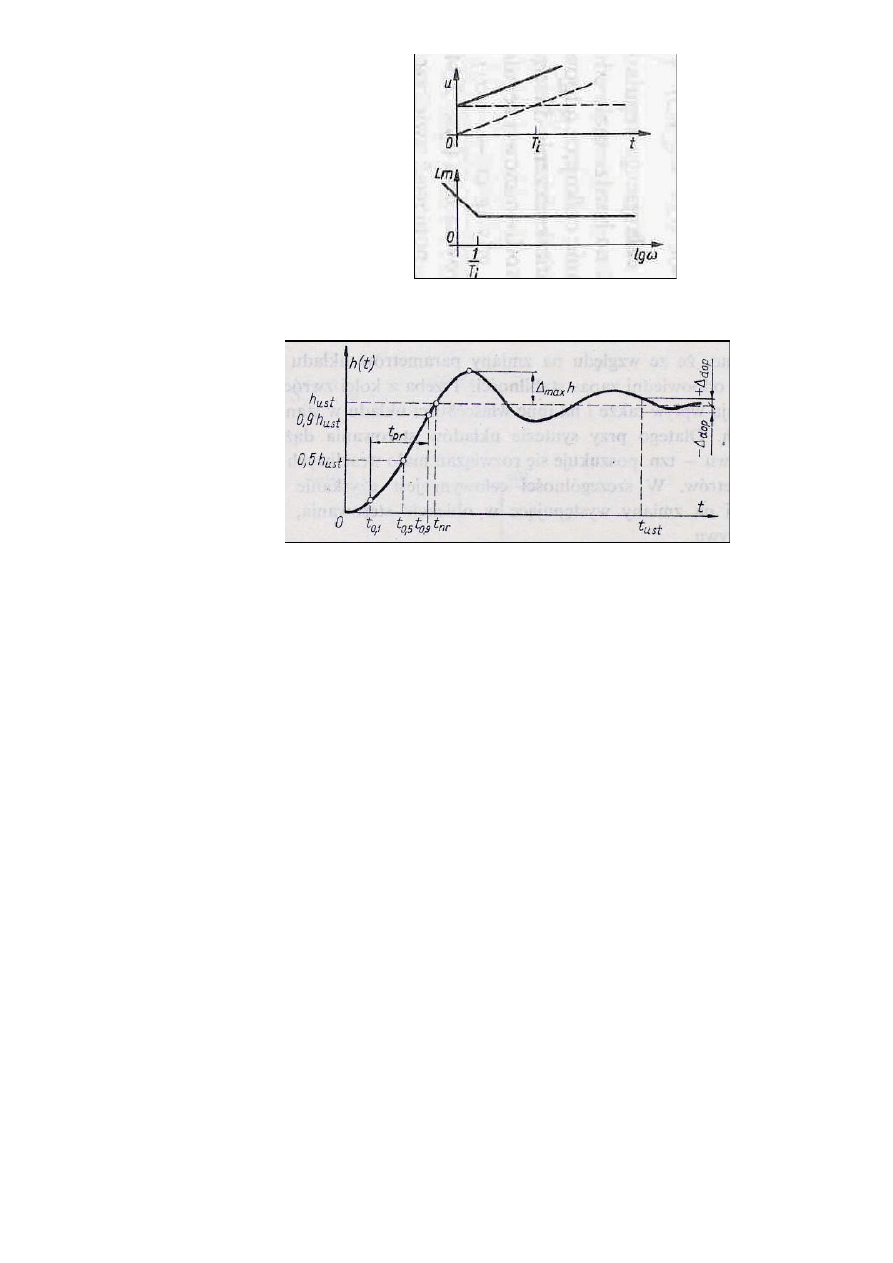
25. Rysunek przedstawia:
b) odpowiedź układu na
wymuszenie jednostkowe,
Wyszukiwarka
Podobne podstrony:
Automatyka zaliczenie
Automatyka zaliczenie
Automatyka zaliczenie
Automatyka do druku ZALICZENIE
Zaliczenie z Automatyki Okretowej2
zaliczenie-automaty1, SGGW Technika Rolnicza i Leśna, Automatyka
TEST2, Studia - Automatyka, Inżynieria oprogramowania, zaliczenie
Zestaw C++-zaliczenie wcześniejsze 2010-2011, Automatyka i Robotyka, Język programowania
TEST4, Studia - Automatyka, Inżynieria oprogramowania, zaliczenie
Zaliczenie wykładów automaty duze, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szk
mems w skrocie, Automatyka i Robotyka, SEMESTR 6, PMEMS, zaliczenie
Automatyka, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, zaliczenie 2014
Zestaw C++-zaliczenie wcze, Automatyka i Robotyka, Semestr III, Języki programowania
SCIAGA3, Studia - Automatyka, Inżynieria oprogramowania, zaliczenie
Poprawkowe kolokwium zaliczeniowe z ćwiczeń Automatyka 03 02 2012 P
więcej podobnych podstron