
Podaje:
1. Ogólne pojęcia,
2. Obiekty regulacji (schematy regulacji do narysowania)
3. układ liniowy - opisać, transmitancja, charakterystyka na wyjściu + charakterystyka
na wejściu + przykład zastosowania.
4. regulatory - podział, zastosowanie w praktyce, opis).
Ad1
1.Sterowanie jest to celowe oddziaływanie na coś , na jakiś przedmiot , urządzenie
techniczne , zjawisko itp. Nad którym sterowanie się odbywa , wykonuje. Obiekt
sterowania i urządzenie sterujące są ze sobą ściśle związane i całość jest nazwana
układem sterowania. Przykład obiektu sterowania : kocioł parowy;piec grzewczy;
agregat prądotwórczy; część organizmu ludzkiego;
2.Urządzenie sterujące może być prostej budowy w przypadku sterowania
automatycznego jak i skomplikowanej budowy jak maszyny matematyczne.
Sterowanie automatyczne mamy wówczas gdy urządzenie sterujące jest
urządzeniem technicznym lub zespołem urządzeń technicznych (gdy steruje
człowiek mówimy o sterowaniu ręcznym). W sterowanie jest zawsze związane z
przekształceniem informacji ale nie każde przekształcenie jest związane ze sterowaniem.
3.Algorytmy sterownia opracowane zostały w celu jak najdokładniejszego sterownia
położeniem i orientacją w manipulatorze roboczym. Mogą być też używane także w
przypadku robotów mobilnych.
4.Mechanizacja jest to zastępowanie człowieka w przekazaniu energii przy pomocy
maszyn energetycznych (początki to wynalezienie maszyny roboczej ).
5.Automatyzacja zachodzi wówczas gdy mamy do czynienia z przekształceniem
informacji i tylko informacji. Automatyzacja spowodował tzw. II rewolucję przemysłową w
XX w.
6.Sterowanie procesem technologicznym jest to zamierzone i celowe wykonanie
czynności dającej w wyniku pożądany przebieg procesu technologicznego. Szczególnym
przypadkiem jest regulacja.
7.Regulacja procesu technologicznego to takie oddziaływanie na urządzenie
techniczne np: piec grzewczy w wyniku którego określona wielkość fizyczna tego
urządzenia np. temperatura T w stopniach była utrzymywana na stałym poziomie (lub
blisko stałego poziomu ) lub zmieniała się w czasie według określonego programu.
8.Obiekt regulacji jest to urządzenie techniczne w którym odbywa się proces
technologiczny objęty regulacją.
9.Wielkość regulowana jest to parametr procesu technologicznego którego wartość
utrzymana jest na stałym poziomie lub poziomie zmieniającym się wg. Ustalonego
programu. Przykład wielkości regulowanej to temperatura w suszarce w czasie procesu
suszenia, napięcie w sieci energetycznej, natężenie przepływu w rurociągu czy ciśnienie
pary w kotle.
10.Wartość zadana wielkości regulowanej jest to wartość wielkości regulowanej
którą należy utrzymać w danym momencie dla zapewnienia odpowiedniego przebiegu
technologicznego.
11.Wartość bieżąca wielkości regulowanej jest to wartość aktualnie istniejąca w
danym momencie wartości mierzonej.
12.Uchyb regulacji lub odchyłka regulacji (bład regulacji) jest to róznica między
wartością zadaną a wartością bieżącą wielkości regulowanej.
13.Wielkości zakłócające to te wielkości które negatywnie wpływają na proces
technologiczny i bez zastosowania regulacji nie da się ich usunąć (np. temperatura
otoczenia).
14.Wymuszenie sterujące to celowe spowodowanie przez obsługę procesu
technologicznego odchylenia wielkości regulowanej od jej wartości zadanej na drodze
zamiany wartości zadanej.
15.Regulator jest to urządzenie służace do automatycznego utrzymania wartośći
bieżącej wielkości regulowanej lub zmienia ją wg zadanej funkcji.
16.Regulator automatyczny jest regulacją odbywającą się za pomocą regulatora.
17.Wielkość nastawcza jest to wielkość wyjściowa regulatora za pomocą której wpływa
on na pracę obiektu regulacji, przykładem wielkości nastawczych jest zużycie wody
zmieniane zaworem regulatora.
18.Wielkość sterująca jest to wielkość nastawcza która jest zmieniona w sposób
celowy i bezpośrednio wpływa na przebieg procesu technologicznego.
19.Sygnał jest to przebieg dowolnej wielkości fizycznej zmieniający się w trakcie
przebiegu procesu technologicznego.
20.Obwód regulacji = układ regulacji najogólniej może być bardzo skomplikowany i
może posiadać wiele obwodów regulacji, wówczas mówimy o wieloobwodowym i
złożonym układzie regulacji.
21.Przepustowość członu jest opisywana zależnościami analitycznymi określające
związki pomiędzy sygnałem wyjściowym a wejściowym członu oraz opisuje tzw.
Właściwości statyczne i dynamiczne .
Przez przepustowość członu rozumie się również stsunek transformaty sygnału
wyjściowego do transformaty sygnału wejściowego .
22.Schematy blokowe – stosuje się przy analizie własności dowolnego układu regulacji
schemat blokowy pokazuje drogę przechodzenia sygnału (sygnałów) na poszczególne
bloki układu regulacji. Na schemacie blokowym urządzenia techniczne oznacza się za
pomocą bloków (prostokątów) gdzie prostokąt oznacza funkcje dynamiczne zmieniające
się w czasie w którym zmiana wielkości wyjściowej jest funkcją czasu i będzie
jednocześnie funkcją zmienną wejściowej. Na schemacie blokowym części od węzła
zaczepowego do sumatora stanowią tor sprzedania zwrotnego.
23. Stała czasowa nazywana czasem połowicznym lub czasem martwym. Jest to
czas po którym wielkość wyjściowa ustala się w określonym poziomie. Stałą czasową
można wyrazić w dwojaki sposób:
y(x2-x1)=x(y2-y1)+y1*x2-y2*x1
24.Układ sterowania otwartego- w układzie otwartym na urządzenie sterujące nie są
podawane żadne informacje, ponieważ są pełne informacje o zakłóceniach (zaburzeniach)
na niego działających. W tym stanie podawanie wiadomości na US jest zbędne.
25.Układ sterowania zamkniętego- na urządzenie sterujące podawane są wiadomości
o oddziaływaniu urządzenia sterującego na obiekt sterowania pojawiających się w postaci
odpowiedniego poziomu wielkości wyjściowej sterowania. W tym układzie istnieje
zamknięta pętla sprzężenia zwrotnego przy czym jest to sprzężenie ujemne.
26.Stan ustalony – stan równowagi układu. Układ znajduje się w stanie ustalonym, gdy
zachowana jest równowaga materiałowa i energetyczna (dopływ materiału i energii = ich
odpływowi).
27. Stan nieustalony – stan przejściowy układu, gdy parametry ulegają odchyleniu od
wartości zadanych, tzn wartość zadana jest większa lub mniejsza od wartości bieżącej.
Nie występuje wtedy równowaga materiałowa i energetyczna
28.Transmitancja operatorowa G(s) funkcja jest jednoimienna na wejściu i
jednoimienna na wyjściu, np. obwód pracy przekaźnika elektromagnetycznego
G(s)=y(s)/u(s).
29.Transmitancja widmowa G(jω)- jeśli na wejściu elementu wymuszenie jest
sinusoidalne to na wyjściu będzie też sinusoidalne o tej samej częstotliwości, ale w
częstym przypadku o innej amplitudzie i fazie, np. koło zamachowe.
30.Transformata Laplace’a – jest jednym z narzędzi matematycznych służących do
rozwiązywania liniowych równań różniczkowych zwyczajnych. W porównaniu z klasyczną,
metoda transformaty operatorowej przekształca równanie różniczkowe zwyczajne w
równanie algebraiczne, którego zmienna jest operator Laplace’a „s”. Wówczas w celu
uzyskania rozwiązania w dziedzinie operatora „s” przekształca się równanie algebraiczne
przy użyciu prostych reguł matematycznych. Ostateczne rozwiązanie równania
różniczkowego uzyskiwane jest poprzez zastosowanie odwrotnej transformaty Laplace’a.
31.Strefa nieczułości – zakres możliwych odchyleń wielkości regulowanej w stanach
ustalonych określony wartością zmiany wielkości regulowanej niezbędnej do pokonania sił
tarcia i luzów oraz do zmiany kierunku przesunięcia organu nastawczego. im mniejsza
strefa nieczułości tym regulacja jest dokładniejsza.
32.Czas całkowania- czas po którym organ wykonawczy regulatora typu PI
pobudzonego skokowym zakłóceniem ɛ nastawi wartość wykonawczą równą dwukrotnej
wartości nastawienia pochodzącej od składowej proporcjonalnej.
33.Czas różniczkowania Td- czas, w którym wielkość wykonawcza osiągnie podwójna
wartość w stosunku do wartości początkowej powstałej w wyniku działania części
różniczkującej D w regulatorze PD zakłóceniem narastającym liniowo na wejściu
regulatora.
Ad3
Układ liniowy – matematyczny model układu regulacji oparty na przekształceniu
liniowym. Będąc matematyczną abstrakcją i swoistą idealizacją, układ liniowy
charakteryzuje się znacznie prostszymi własnościami niż układ nieliniowy. Model liniowy
stosuje się więc tylko wówczas, gdy uda się znaleźć pewien zakres wartości zmiennych,
dla których model ten nie odbiega znacząco od faktycznie nieliniowego układu fizycznego.
Innymi słowy modele liniowe, dogodne z matematycznego punktu widzenia, często
stosuje się do opisu układów nieliniowych, które wcześniej zostały zlinearyzowane z tego
względu modele liniowe są bardzo często wykorzystywane, znajdują ważne zastosowania
w teorii sterowania, w przetwarzaniu sygnałów i w telekomunikacji. Na przykład w
systemach łączności bezprzewodowej medium, w którym następuje rozprzestrzenianie się
fal, można modelować za pomocą układu liniowego.
Transmitancja operatorowa (funkcja przejścia, G(s)) - stosunek transformaty
Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego układu
przy zerowych warunkach początkowych:
Jest alternatywną do równań stanu metodą opisu układu dynamicznego. Transmitancja
określa ogólne własności stacjonarnego układu liniowego o jednym wejściu i jednym
wyjściu, niezależne od rodzaju wymuszenia. Dla układu wielowymiarowego o n wejściach
i m wyjściach można określić m x n transmitancji wiążących każde wyjście z każdym
wejściem. Transmitancji używa się często dla uproszczenia obliczeń związanych z
projektowaniem układu złożonego z wielu elementów, głównie w cyfrowym przetwarzaniu
sygnałów, elektronice i automatyce.
Wygnał na wejściu
,
Sygnały na wyjściu
,
Ad4.
Podział regulatorów: 1. Bezpośredniego działania(energia potrzebna do
zasilania/uruchomienia organu wykonawczego pobierana jest z obiektu regulacji).
2.pośredniego działania(z energią pomocniczą, gdzie energia niezbędna do uruchomienia
organu porównawczego pobierana jest ze źródła zewnętrznego, poza układem regulacji).
W zależności od rodzaju nośnika zużytego do zasilania znajdującego się w regulatorze :-
pneumatyczne, -hydrauliczne ,-elektryczne ,-mieszane.
Inny podział: -regulatory ciągłe ,-o działaniu nieciągłym.
Ze względu na rodzaj wyjścia:1.regulatory o wyjściu całkowicie ciągłym ( wzmacniacz
regulatora działa w sposób ciągły tzn. na wyjściu wzmacniacza regulatora wielkość
wyjściowa przyjmuje wszystkie wartości z przedziału zmian). 2.regulatory
trójpołożeniowe i krokowe (w których wzmacniacz regulatora jest nieciągły, a ciągłość
zmian jest uzyskiwana dzięki własnościom całkującym silnika wykonawczego.
Regulatory nieciągłe dzielimy na:- regulatory impulsowe , w których istnieje
narzucony przebieg działania w czasie, - regulatory dwupołożeniowe w zależności od
charakterystyki obiektu i występujących zakłóceń.
Regulatory bezpośredniego działania: -reg. Ciśnienia i różnicy ciśnień, -natężenia
przepływu, -poziomu, -temperatury.
Ze względu na rodzaj elementu pomiarowego wyróżniamy regulatory: -mieszkowe, -
membranowe, -manometryczne, -ciecze, -parowe i gazowe, -pływakowe, -
dylatometryczne, -bimetaliczne.
Regulator proporcjonalny typu P . G
P
(s)=K
P
.Składa się z jednego członu typu P (
proporcjonalnego) , którego transmitancję określa wzmocnienie. Układy regulacji z
regulatorem typu P charakteryzują się niezerowym uchybem ustalonym w przypadku gdy
transmitancja zastępcza układu posiada jedynie bieguny niezerowe – tym większym im
większe jest wzmocnienie regulatora .
Regulatory P wzmacniają odchyłkę regulacji ze współczynnikiem proporcjonalności K
P
. Im
większa zostanie wybrana wartość współczynnika , tym dokładniej pracuje układ
regulacji, ale tym bardziej skłonny jest do pracy niestabilnej.
Regulator typu I- umożliwia realizację regulacji astatycznej . Z obiektami astatycznymi
może tworzyć niestabilne układy regulacji. Może być stosowany głównie w obiektach
statycznych charakteryzujących się powolnymi zmianami obciążenia.
Regulator PI składa się z członu proporcjonalnego P oraz wzmocnienia K
P
z członu
całkującego I o czasie całkowania T
i
. G
PI
(s)=K
P
(1+1/T
i
*s) – transmitancja regulatora PI.
Kp1i kp2- nastawcze współczynniki proporcjonalności
Współczynniki k
p1
i k
p2
dobieramy tak , aby regulacja była najodpowiedniejsza.
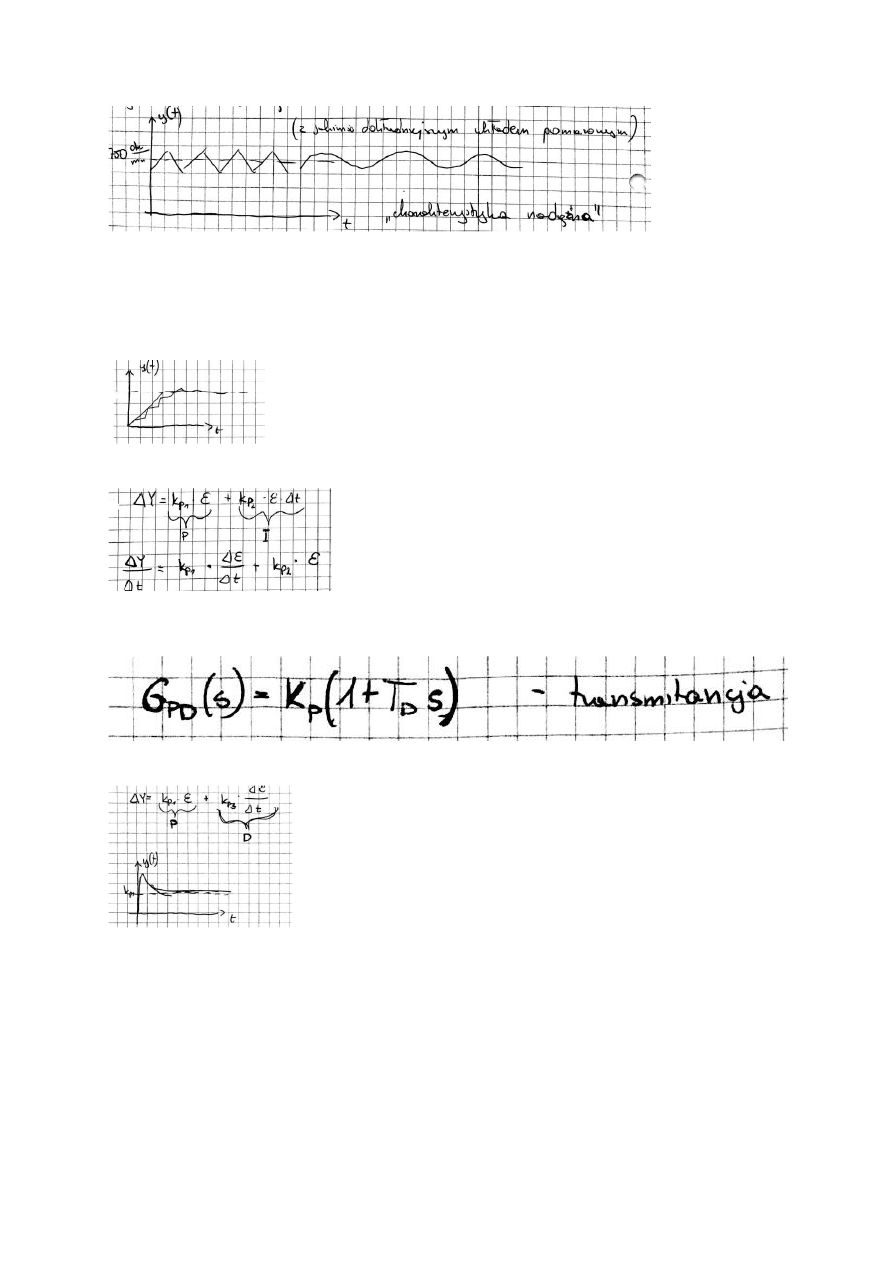
Regulator proporcjonalno różniczkujący PD.
Regulator składa się z dwóch członów , Proporcjonalnego P i wzmocnieniu K
p
oraz
różniczkującego D o czasie różniczkowania T
d
.
Kp3- nastawczy współczynnik proporcjonalności
E=x0-x
Człon PD pozwala na zwiększenie intensywności działania pozostałych parametrów
regulatora. Człon przeciwdziała szybkim zmianom sygnału błędu , co wpływa
stabilizująco.
Regulator PID składa się z członu proporcjonalnego P i wzmocnienia K
P1
, członu
całkującego I o czasie zdwojenia T
I
oraz różniczkującego D o czasie … T
d
. Celem jest
utrzymanie wartości wyjściowej na określonym poziomie znanym wartością zadaną.
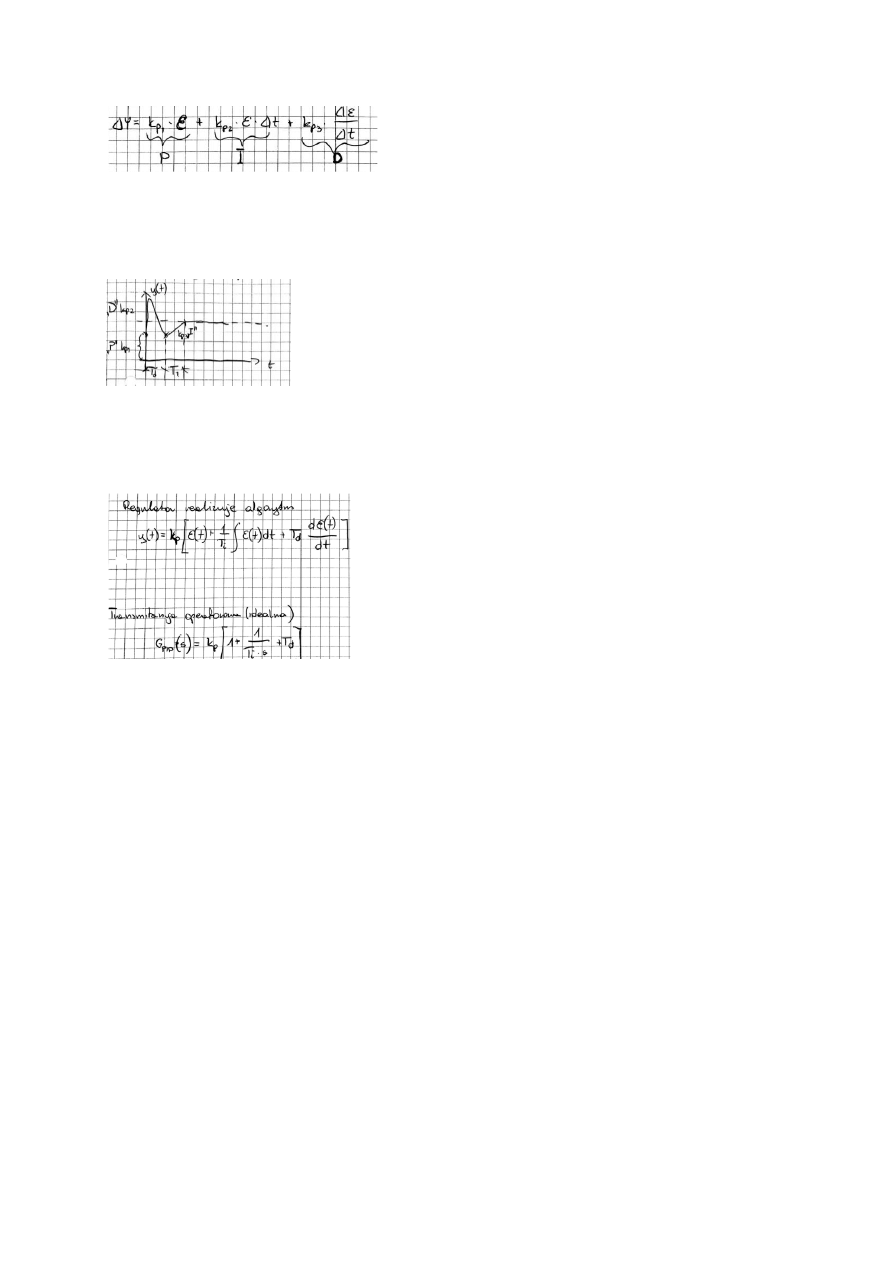
Po pojawieniu się uchybu E=x0-x załącza się człon proporcjonalny do wielkości uchybu i
prędkości jego nastawy (PD). Nastepnie uchyb się nie zmienia deltaE/delta t=0, organ
wykonawczy cofa się do położenia jakie by w tym czasie zajął gdyby był regulatorem
typu PI
Czas różniczkowania Td- czas, w którym wielkość wykonawcza osiągnie podwójna
wartość w stosunku do wartości początkowej powstałej w wyniku działania części
różniczkującej D w regulatorze PD zakłóceniem narastającym liniowo na wejściu
regulatora.
Ti- czas zdwajania
Td- czas wyprzedzania
E- wartość uchybu
Kp- współczynnik wzmocnienia
Ad2
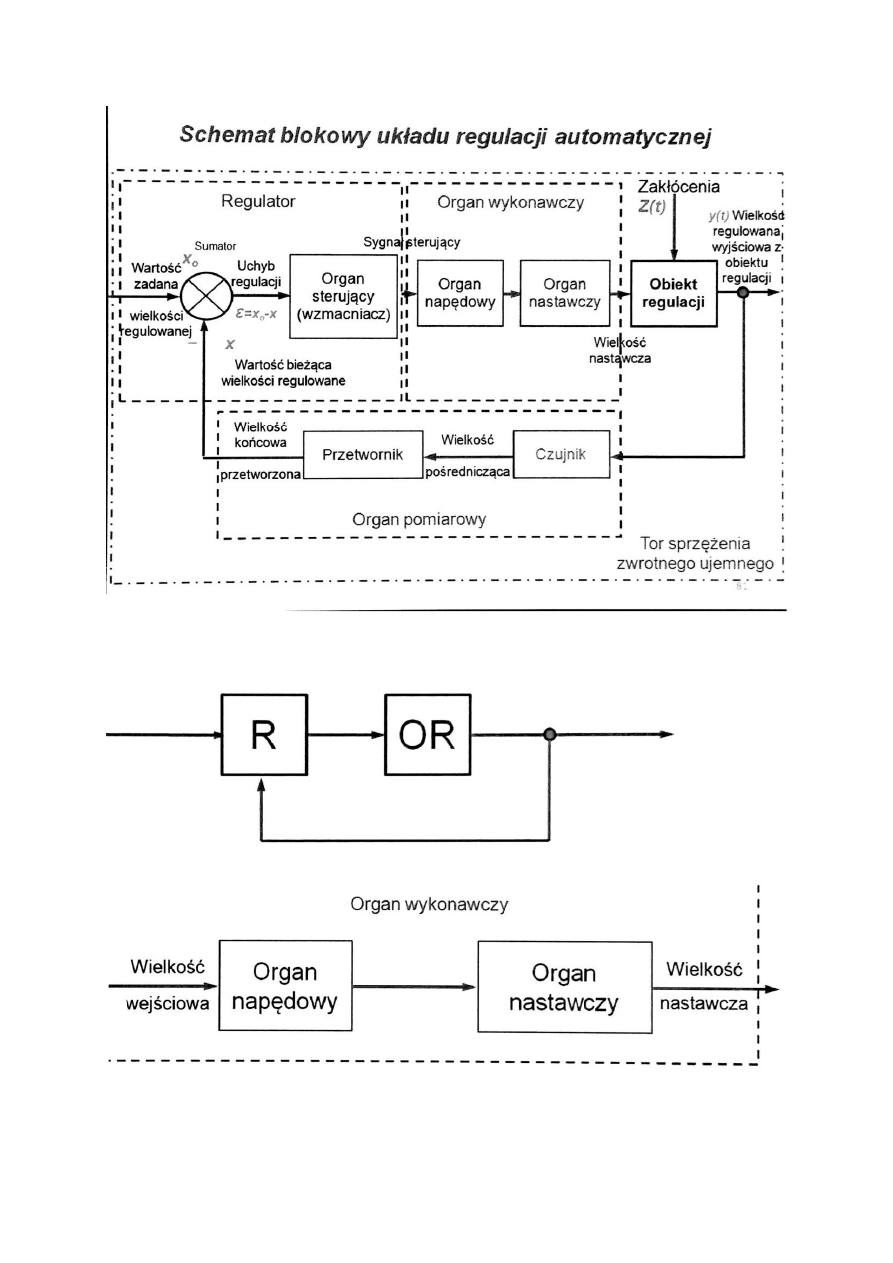
W układzie uproszczonym rysuje się tylko dwa regulacji i regulator. Zakłada się że obiekt regulacji w
rzeczywisto
ści zawiera
organ
wykonawcz
y oraz organ
pomiarowy.
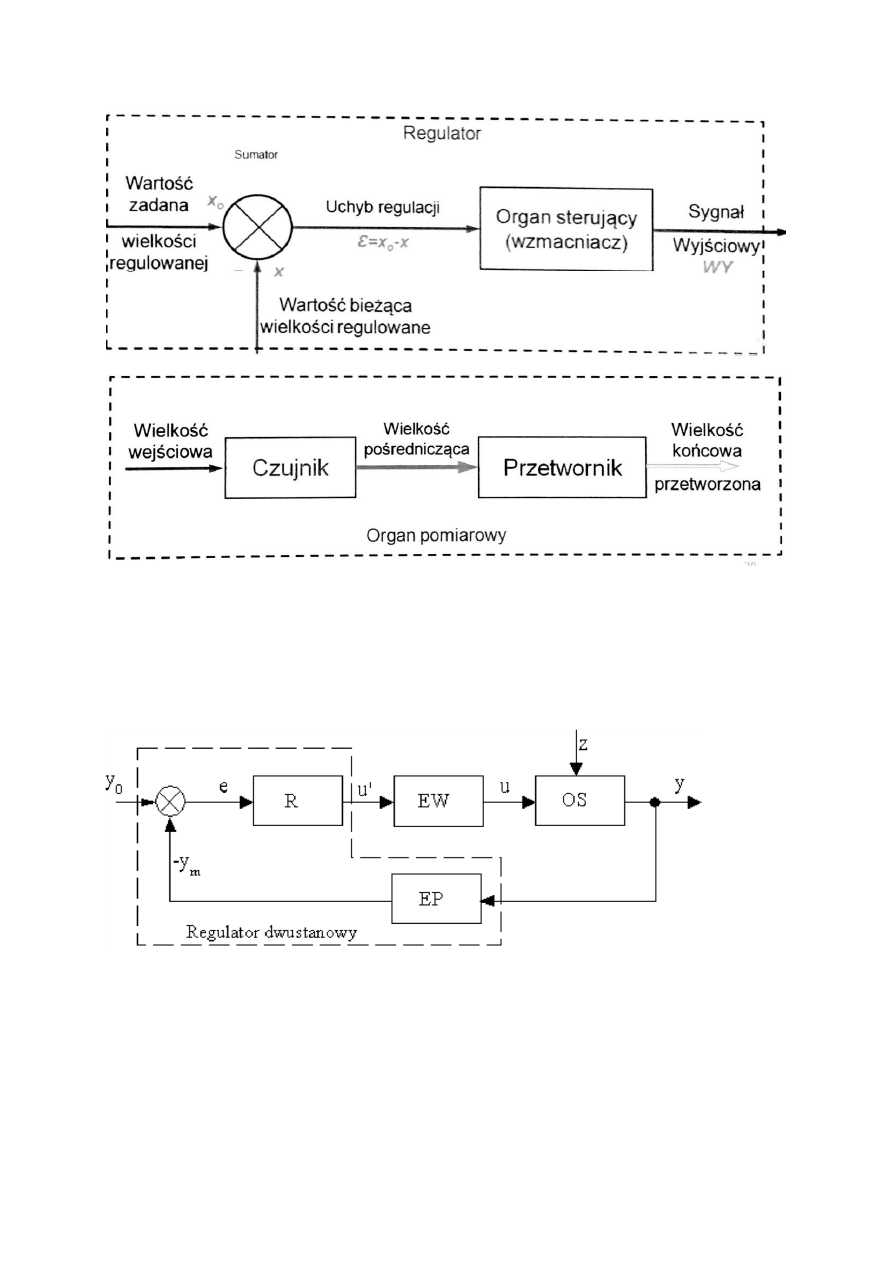
Schemat blokowy układu regulacji dwupołożeniowej
Wyszukiwarka
Podobne podstrony:
Automatyka zaliczenie
Automatyka zaliczenie
Automatyka zaliczenie
Automatyka zaliczenie
Automatyka do druku ZALICZENIE
Zaliczenie z Automatyki Okretowej2
zaliczenie-automaty1, SGGW Technika Rolnicza i Leśna, Automatyka
TEST2, Studia - Automatyka, Inżynieria oprogramowania, zaliczenie
Zestaw C++-zaliczenie wcześniejsze 2010-2011, Automatyka i Robotyka, Język programowania
TEST4, Studia - Automatyka, Inżynieria oprogramowania, zaliczenie
Zaliczenie wykładów automaty duze, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szk
mems w skrocie, Automatyka i Robotyka, SEMESTR 6, PMEMS, zaliczenie
Automatyka, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, zaliczenie 2014
Zestaw C++-zaliczenie wcze, Automatyka i Robotyka, Semestr III, Języki programowania
SCIAGA3, Studia - Automatyka, Inżynieria oprogramowania, zaliczenie
Poprawkowe kolokwium zaliczeniowe z ćwiczeń Automatyka 03 02 2012 P
więcej podobnych podstron