2013-05-28
1
Mechanika i mechatronika
• Bibliografia:
1. Schmid D., Mechatronika, tłum. z niem. oprac. wersji
pol. Olszewski M., Wyd. REA, Warszawa 2002.
2. Bishop R. H., The Mechatronics Handbook, Austin,
Texas, CRC Press 2002.
3. Turowski J., Podstawy Mechatroniki, Wyd. WSHE,
Łód
ź
2008.
4. Heimann
B.,
Gerth W.,
Popp
K.,
Mechatronika.
Komponenty, metody, przykłady. PWN, Warszawa
2001.
5. Gad-el-Hak M. The MEMS Handbook, CRC Press
2006.
Czym jest mechatronika?
mechanics + electronics = mechatronics
mechanika + elektronika = mechatronika
Definicje, cel i zakres mechatroniki
Okre
ś
lenie mechatronika zostało wprowadzone do terminologii technicznej
przez japo
ń
sk
ą
firm
ę
Yaskawa Elektric Corporation (f-ma zało
ż
ona w
1915 r.) i od 1971 r. było chronione jako nazwa handlowa.
W 1982 roku Yaskawa Elektric Co. zrezygnowała z ochrony patentowej
swojego znaku handlowego i od tej pory wszyscy mog
ą
u
ż
ywa
ć
tego
okre
ś
lenia.
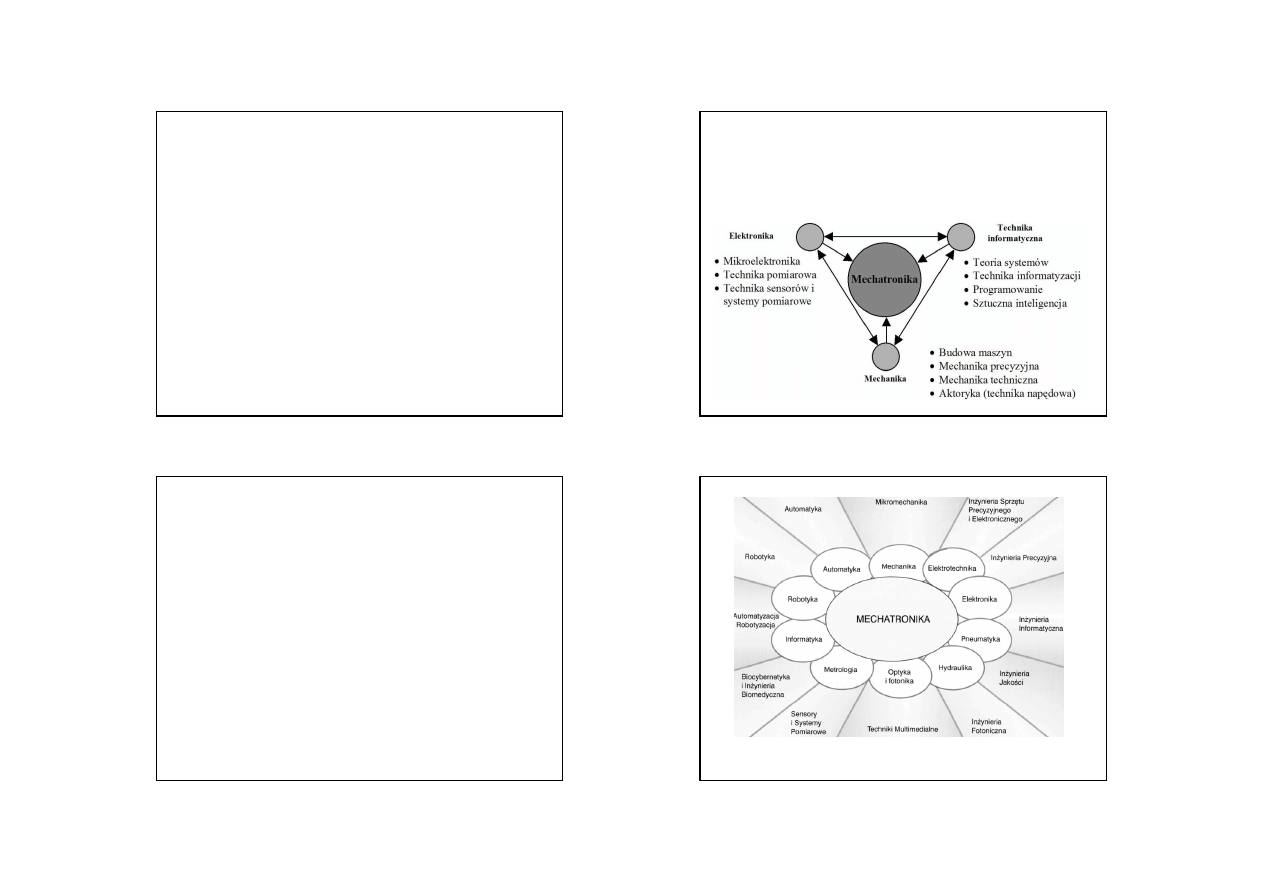
Mechatronika jest dziedzin
ą
interdyscyplinarn
ą
, ł
ą
cz
ą
c
ą
w
sposób synergiczny wiedz
ę
z klasycznej budowy maszyn,
hydrauliki, pneumatyki, elektrotechniki elektroniki, optyki i
informatyki.
Intergracja różnych dziedzin techniki i nauki
2013-05-28
2
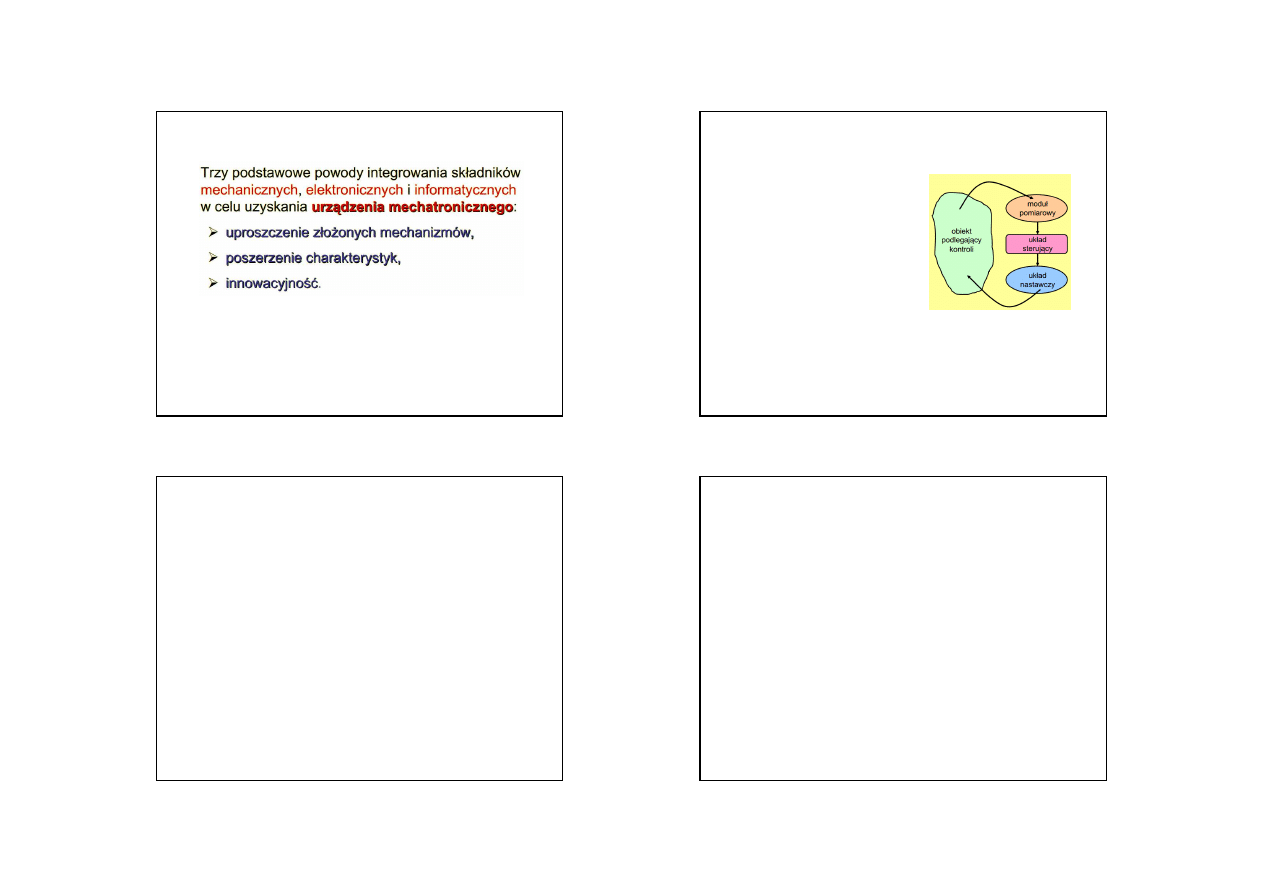
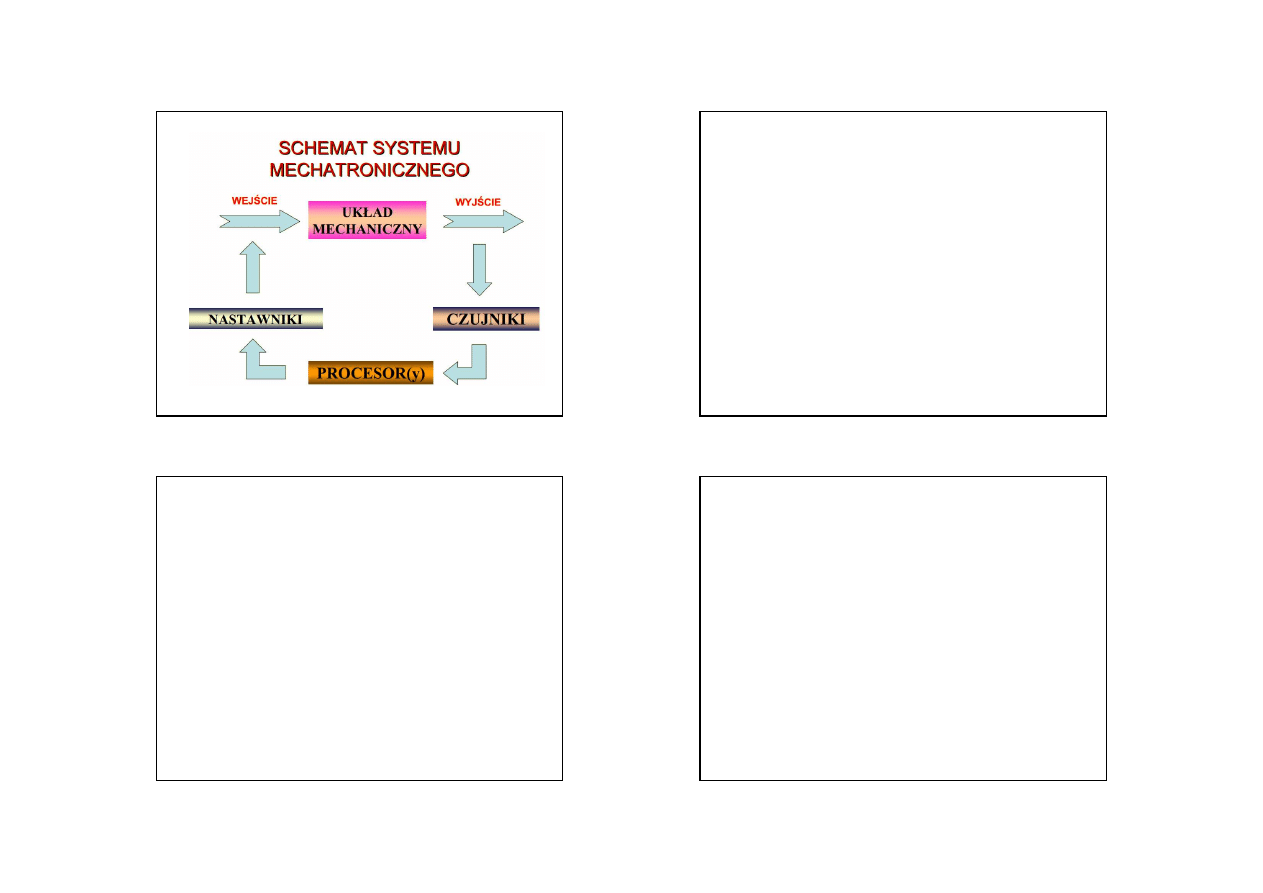
Architektura systemu mechatronicznego
System mechatroniczny jest to zamkni
ę
ty układ
sterowania zbudowany z nast
ę
puj
ą
cych jednostek
funkcjonalnych
:
-
obiektu podlegaj
ą
cego kontroli
- moduł pomiarowy
-
układ steruj
ą
cego
- modułu nastawczego
System mechatroniczny jest zintegrowany na poziomie
sprz
ę
towym i programowym.
Systemowe podej
ś
cie przy projektowaniu urz
ą
dze
ń
i
systemów mechatronicznych
Interdyscyplinarno
ść
mechatroniki wymusza inne podej
ś
cie
do projektowania urz
ą
dze
ń
, maszyn i systemów, ni
ż
to ma
miejsce w przypadku rozwi
ą
za
ń
konwencjonalnych.
W mechatronice ju
ż
od fazy wst
ę
pnej koncepcji projektu
uwzgl
ę
dnia
si
ę
cele
funkcjonalne
i
u
ż
ytkowe
danego
rozwi
ą
zania.
Jest to podej
ś
cie systemowe, a nie proste doł
ą
czanie do
układów
ju
ż
funkcjonuj
ą
cych
elementów
sterowania
automatycznego.
Klasyfikacja systemów mechatronicznych
W zale
ż
no
ś
ci od technologii produkcji oraz wielko
ś
ci bloków
funkcjonalnych wchodz
ą
cych w skład systemu mechatronicznego
wyró
ż
niamy trzy rodzaje systemów:
- systemy mechatroniczne
- systemy mikroelektromechaniczne (MEMS –
MicroElectroMechanical Systems)
- systemy nanooelektromechaniczne (NEMS –
NanoElectroMechanical Systems)
2013-05-28
3
Klasyfikacja czujników
Czujnik
przetwornik
wielko
ś
ci
fizycznej
(odległo
ść
,
siła
temperatura itd.) na sygnał elektryczny.
Klasyfikacja czujników ze wzgl
ę
du na zasad
ę
działania:
-potencjometryczne
-pojemno
ś
ciowe
-indukcyjne
-ultrad
ź
wi
ę
kowe
-tensometryczne
-piezoelektryczne
-piezorezystywne
-
ś
wiatłowodowe
Sensory
Klasyfikacja czujników ze wzgl
ę
du na mierzon
ą
wielko
ść
:
- poło
ż
enia, odległo
ś
ci i k
ą
ta obrotu
- przyspieszenia
- siły, ci
ś
nienia i momentu obrotowego
- przepływu
- temperatury
- nat
ęż
enia
ś
wiatła
Klasyfikacja czujników ze wzgl
ę
du na
ź
ródło energii
sygnału pomiarowego:
- pasywne - energia potrzebna do wytworzenia sygnału
wyj
ś
ciowego jest czerpana ze zjawiska fizycznego (pomiar
temperatury z wykorzystaniem termopary)
- aktywne - wymagaj
ą
zewn
ę
trznego
ź
ródła energii do
wytworzenia sygnału wyj
ś
ciowego (pomiar napr
ęż
enia z
wykorzystaniem tensometru)
Czujniki poło
ż
enia, odległo
ść
i, k
ą
ta obrotu
1. Czujniki dotykowe (inwazyjne)
•
LVDT – Linear Voltage Differential Transformer
•
Potencjometry
2. Czujniki zbli
ż
eniowe bezdotykowe (bezinwazyjne)
•
indukcyjne
•
pojemno
ś
ciowe
•
ultrad
ź
wi
ę
kowe
•
resolver (bezdotykowy transformator poło
ż
enia k
ą
towego)
3. Enkodery
2013-05-28
4
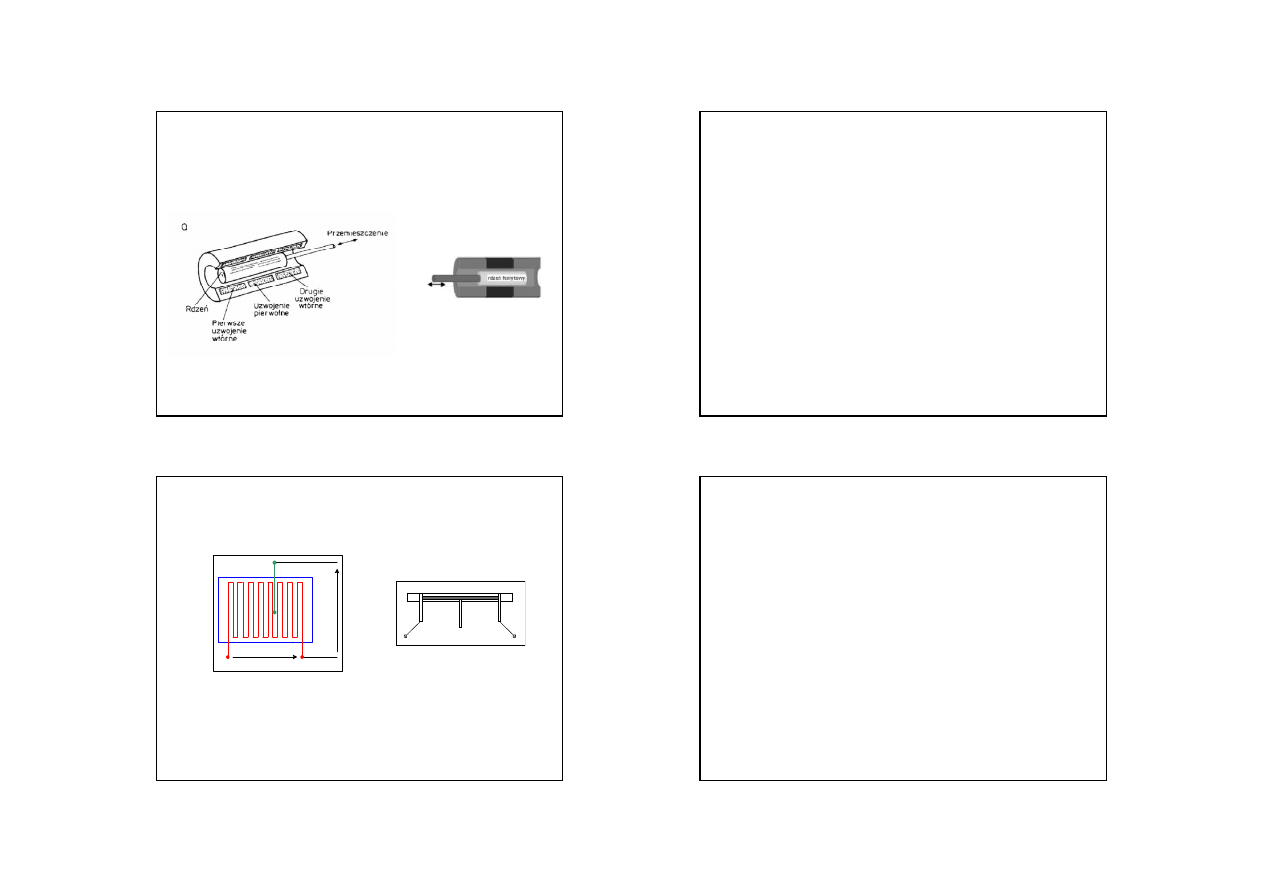
Czujnik LVDT/RVDT (Linear/Rotational Voltage Differential
Transformer)
różnicowy
przetwornik
przemieszczeń
liniowych/kątowych wykorzystuje zjawisko zmiany natężenia pola
magnetycznego wewnątrz uzwojenia spowodowane zmianą położenia
rdzenia ferrytowego.
Przesunięcie rdzenia powoduje zmianę
indukcyjności wzajemnej
obwodu pierwotnego
i
wtórnego.
Przy
stałym
napięciu
pierwotnym, zmienia się więc napięcie wtórne.
LVDT
* Odporne na trudne warunki otoczenia
* Duża trwałość, brak tarcia
* Dotykowe pomiary niewielkich odległości i przemieszczeń (poniżej 1 m)
•Pomiary przemieszczeń do ok. 1m
Transformatorowy przetwornik przemieszczenia liniowego
(LVDT) - Jest to popularny przetwornik przemieszczenia, jest
transformatorem z ruchomym rdzeniem. Do uzwojenia
pierwotnego doprowadza się napięcie zmienne i mierzy się
napięcie indukowane w uzwojeniu wtórnym.
Zalety i wady
* Niski koszt
* Minimalna obróbka (przygotowanie) sygnału
* Niska trwałość
Uz
Uw
Element oporowy – zwój drutu (lepsza liniowość), lub plastyk (lepsza rozdzielczość)
Potencjometry
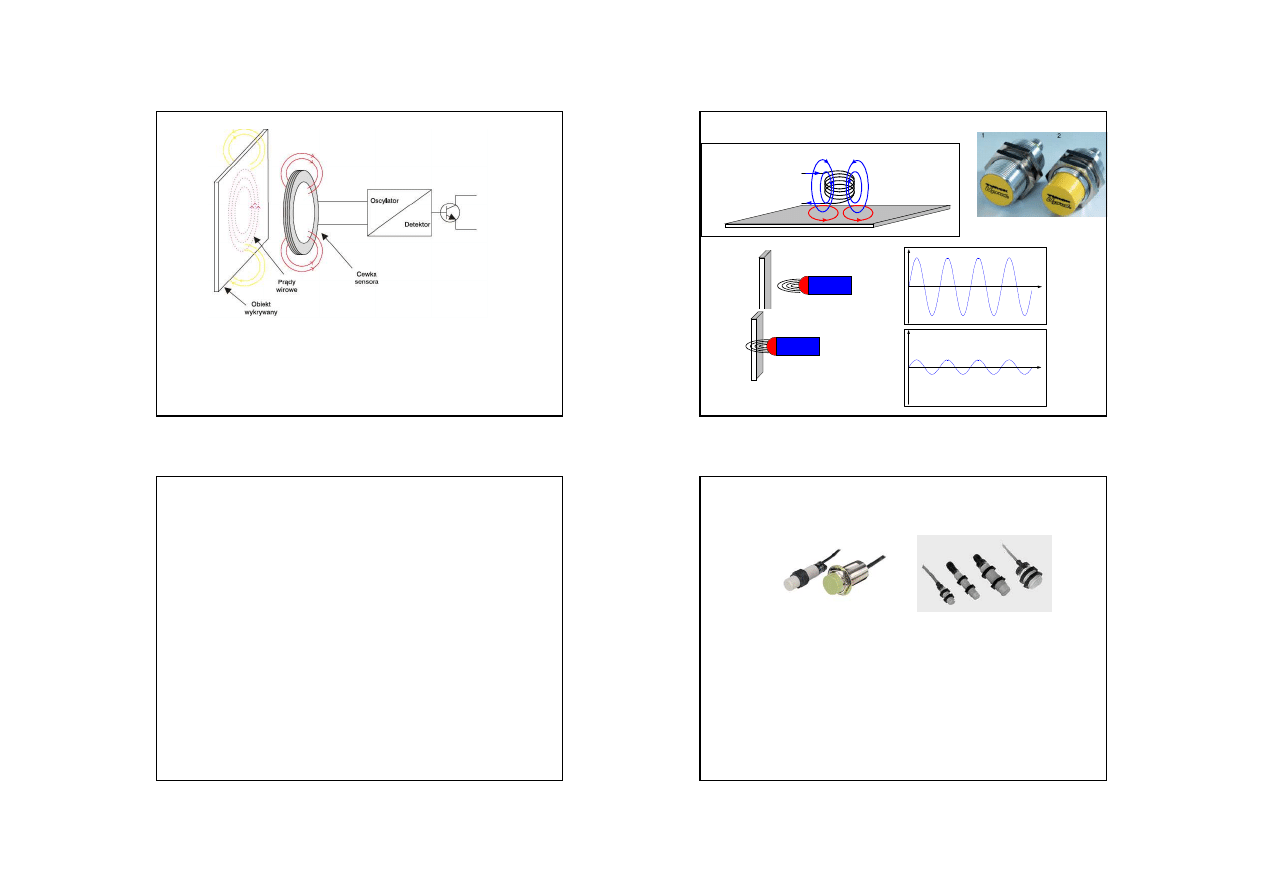
Indukcyjny czujnik zbliżeniowy działa na zasadzie zmiany swojego
pola elektromagnetycznego wskutek przemieszczania przewodnika
metalicznego.
W przewodniku indukowane są prądy wirowe, które pobierają energię z
pola, zmniejszając w ten sposób wysokość amplitudy drgań. Prądy
wirowe indukowane w ekranie metalowym wytwarzają własne pole
osłabiające pole główne. Zbliżanie ekranu zmniejsza strumień
magnetyczny.
Reakcją na zbliżany metal jest zamknięcie lub rozwarcie obwodu
elektrycznego.
indukcyjny czujnik zbliżeniowy posiada cztery główne komponenty
cewkę, oscylator, obwody detekcji i obwody wyjściowe
Czujniki indukcyjne - zasada działania
2013-05-28
5
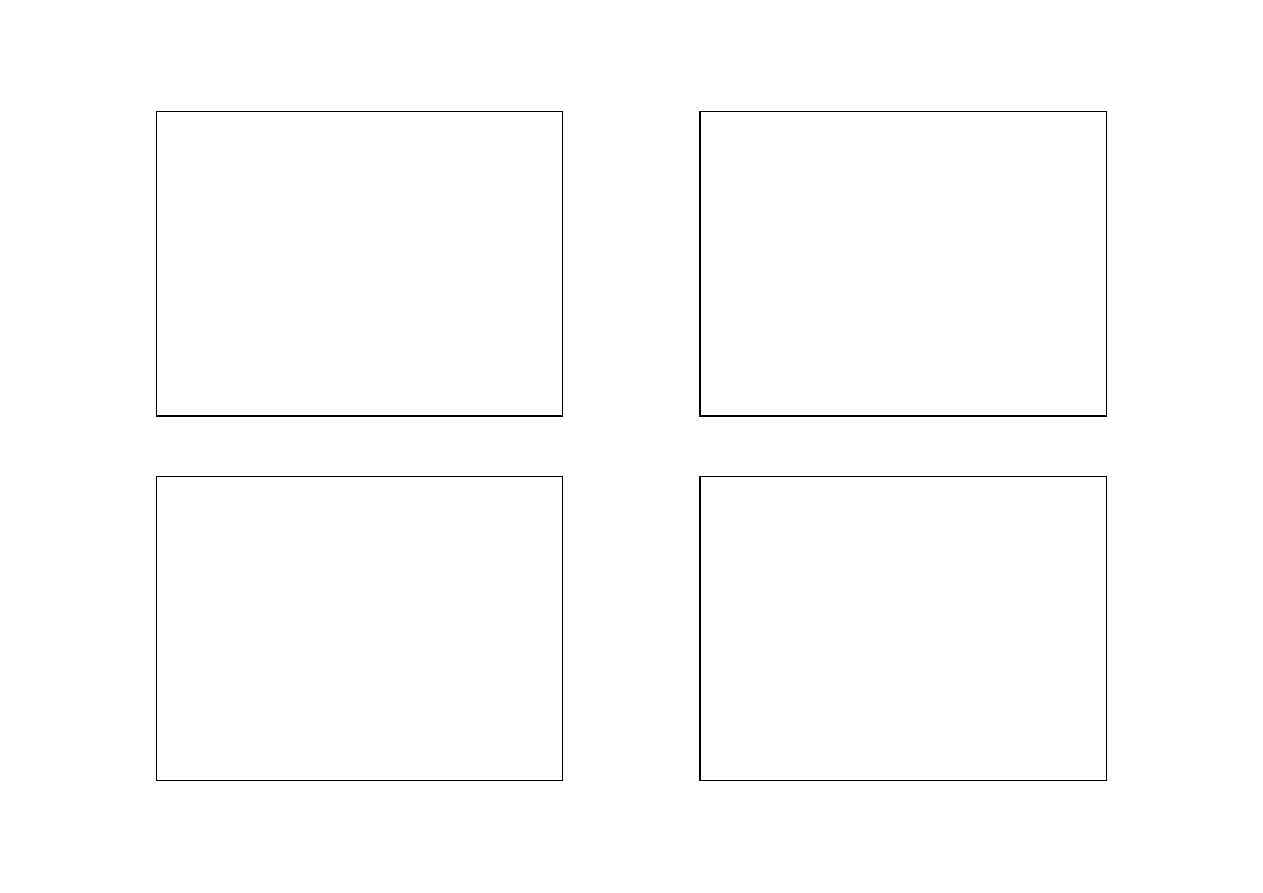
Dzi
ę
ki interakcji pól amplituda oscylacji zmniejsza si
ę
. Jest ona
monitorowana przez obwody detekcji sensora, które poni
ż
ej
pewnej warto
ś
ci amplitudy powoduj
ą
aktywacj
ę
obwodów
wyj
ś
ciowych.
Zasada działania indukcyjnego czujnika zbli
ż
eniowego
Czujniki indukcyjne
t [s]
i(t)
t [s]
i(t)
Czujniki indukcyjne
Zalety
Wady
* Eliminują potrzebę kontaktu
* Wykrywają jedynie metal
* Wykrywają metal przez barierę
niemetaliczną
* Wymiar powinien być większy niż
1,5 średnicy cewki
* Odporne na trudne warunki
ś
rodowiskowe
* Stosunkowo mały zakres
pomiarowy, zwykle 30-50%
ś
rednicy cewki
* Mały czas odpowiedzi
* Zakłócenia pomiarów przez wiórki
metalowe
* Duża trwałość, praktycznie
nieskończona liczba cykli pracy
Czujniki pojemnościowe
Służą głównie do kontroli poziomu cieczy w zbiornikach, wykrywania
materiałów ziarnistych i proszkowych, elementów z tworzyw sztucznych,
szkła, drewna i metalu.
Czujniki pojemnościowe mierzą odległość między czujnikiem a przedmiotem
wykrywając zmiany pojemności szczeliny powietrznej.
2013-05-28
6
Czujniki pojemnościowe
Zalety
Wady
* Mogą wykryć praktycznie wszystko
* Zwykle mały zakres pomiarowy
(mniej niż 15 mm)
* Mogą wykryć ciecz przez barierę
niemetaliczną
* Wrażliwe na zanieczyszczenia,
zmiany temperatury, wilgotności
* Dokładne w czystym środowisku
* Czułość jest funkcją kształtu i
rodzaju materiału
* Krótki czas odpowiedzi
* Detekcja odległości i rodzaju
materiału
* Duża trwałość, praktycznie
nieskończona liczba cykli pracy
Czujniki ultradźwiękowe
Zalety
Wady
* Wykrywają więcej rodzajów
obiektów, niż pozostałe
* „Martwa strefa” blisko czujnika –
nie mogą wykrywać bliskich
obiektów
* Duży zakres pomiarowy, większy
niż dla czujników indukcyjnych i
pojemnościowych
* Nie mogą wykrywać małych
obiektów
* Duża trwałość, praktycznie
nieskończona liczba cykli pracy
* Gładkie powierzchnie muszą być
umieszczone prostopadle do
czujnika
* Niska cena
* Niezbyt duża dokładność
Sensory cyfrowe – enkodery
1) Inkrementalne sensory położenia (impulsowe)
-
optyczne sensory położenia liniowego i kątowego
-
magnetyczne sensory położenia liniowego i kątowego
2) Absolutne sensory położenia (kodowe)
Inkrementalne sensory przemieszczenia wyposażone są w
liniał z podziałką kreskową. Odczytywanie położenia kresek
dokonywane jest metodami optycznymi lub magnetycznymi
Przetworniki
obrotowo-impulsowe
są
urządzeniami
obrotowymi. Na wyjściu generują podwójny ciąg impulsów
przesuniętych względem siebie o 90°. Pozwala to rozróżnić
kierunek obrotu wałka. Na każdy obrót osi enkodera na wyjściu
pojawia się określona ilość impulsów.
Jeżeli mamy enkoder o impulsacji 1000 imp/obr to na wyjściu
pojawi
się
impuls
przy
obrocie
osi
wałka
o
każde
360/1000=0,36°.
Przetworniki obrotowo-impulsowe stosowane są w układach
gdzie występuje określona zależność między jednym obrotem a
inną wielkością fizyczną.
Podłączając na wyjściu standardowe liczniki impulsów możemy
tworzyć układy pomiarowe długości, prędkości obrotowej przy
jednostronnym kierunku obrotów. Stosując liczniki z wejściem
kwadraturowym możemy liczyć długość z rozróżnieniem
kierunku obrotu.
Enkodery inkrementalne (obrotowo-impulsowe)
2013-05-28
7
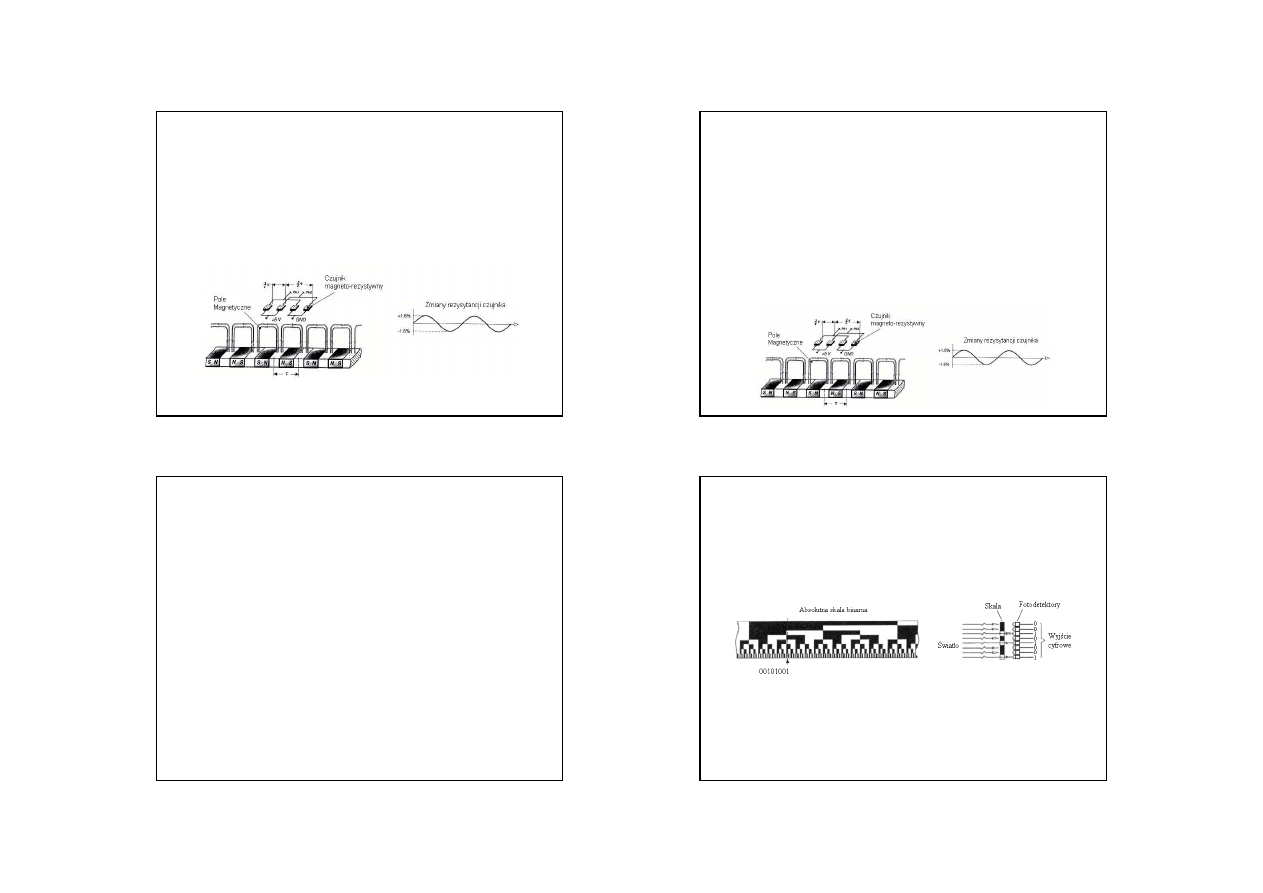
Enkodery inkrementalne - magnetyczne
Enkodery magnetyczne składają się z czujników, zmieniających
swój opór magnetyczny pod wpływem zewnętrznego strumienia
magnetycznego. Strumień magnetyczny natomiast jest wytwarzany
przez namagnesowany liniał z magnesami trwałymi.
Reluktancja czujników zmienia się w przybliżeniu 1,6%, gdy pole
magnetyczne wzniecone przez liniał zmienia swoją biegunowość.
Czujniki są połączone elektrycznie mostkiem i zasilane stałym
napięciem 5V. Sygnał na wyjściu mostka zmienia się sinusoidalnie,
reagując na zmiany rezystancji czujnika. Przesunięcie się
namagnesowanego liniału o jedną podziałkę biegunową odpowiada
jednemu okresowi sygnału wyjściowego.
Enkodery inkrementalne – magnetyczne
Zasada działania
Enkodery optyczne posiadają klasę dokładności o wiele wyższą niż
enkodery magnetyczne. Technologia optyczna jest najszerzej
stosowana w przemyśle
Enkodery magnetyczne
charakteryzują
się prostotą,
solidną
budową
i
niskim
kosztem,
ale
ograniczoną
czułością
na
zanieczyszczenia. Mogą natomiast pracować w obecności ciężkich
cieczy. Wykonywane są z metalu i dlatego mogą stawiać opór
silniejszym drganiom. Uznawane są za bardziej niezawodne i
pobierają mniej energii.
Enkodery inkrementalne – porównanie
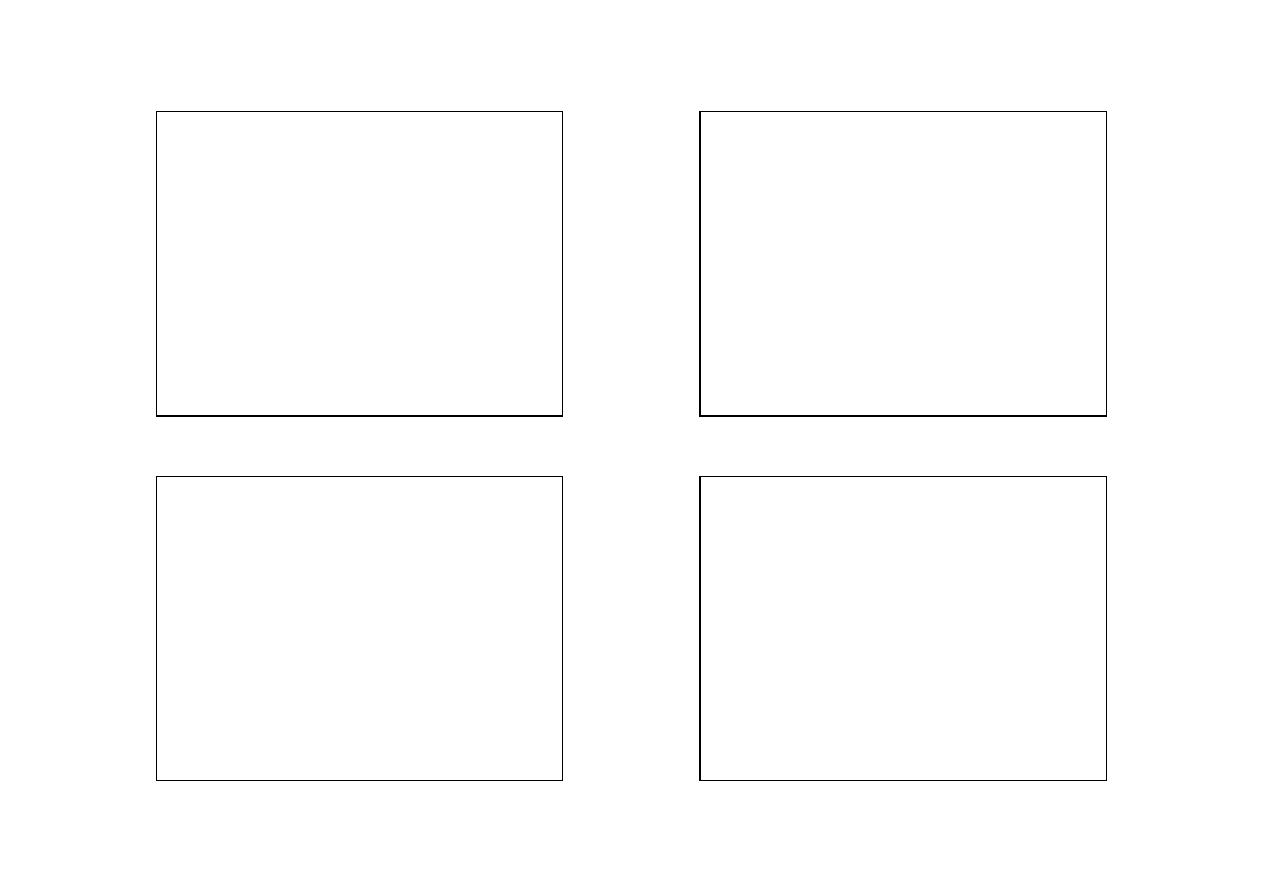
Enkodery absolutne
Enkodery absolutne mogą mieć liniały lub tarcze kodowe
Najbardziej rozpowszechnionymi kodami wykorzystywanymi w
tego typu urządzeniach to naturalny kod dwójkowy (ang. natural
binary code – NBC), kod Gray’a lub kod dwójkowo-dziesiętny
(ang. binary code decimal – BCD).
Zasada działania enkodera absolutnego: absolutna skala liniowa, detekcja bitów
Obrotowe tarcze kodowe stosowane są w sensorach absolutnego
położenia kątowego, a w połączeniu z przekładnią śrubową lub
przekładnią zębatkową - do pomiarów absolutnych położeń
liniowych.
2013-05-28
8
Enkodery absolutne
Przetworniki obrotowo-kodowe wykonywane są jako urządzenia
jedno- i wieloobrotowe (ograniczona ilość impulsów). Na wyjściu w
zależności od położenia kątowego wałka generują sygnał kodowy.
Pozwala to dokładnie określić kąt obrotu i ilość wykonanych
obrotów (dla enkoderów wieloobrotowych). Można powiedzieć, że
enkodery absolutne dokładnie “pamiętają” położenie kątowe osi.
Jeżeli mamy enkoder wieloobrotowy o rozdzielczości określonej
jako 25 bitów (z czego 13 bitów przypada na każdy obrót i 12 na
ilość obrotów) to możemy określić położenie kątowe z dokładnością
do 1/8192=0,0012° na 4096 obrotów.
Enkodery absolutne stosowane są w układach pozycjonowania,
kalibracji maszyn, robotyce itp.
Zjawisko fizyczne
Zjawisko fizyczne
– przemiana, na skutek której zmieniaj
ą
si
ę
tylko
wła
ś
ciwo
ś
ci fizyczne ciała lub obiektu fizycznego,
natomiast wła
ś
ciwo
ś
ci chemiczne pozostaj
ą
bez zmian.
Zjawisko fizyczne to zmiany i procesy zachodz
ą
ce dookoła
nas w przyrodzie, np. topnienie lodu.
Aby zjawiska fizyczne mogły zaj
ść
, potrzebna jest siła.
Siłami s
ą
ró
ż
ne oddziaływania, np. oddziaływania
podstawowe jak oddziaływanie elektryczne, magnetyczne,
grawitacyjne lub oddziaływania pochodne, np.
mi
ę
dzycz
ą
steczkowe czy tarcie.
Zjawiska fizyczne wykorzystywane w
czujnikach i aktuatorach urz
ą
dze
ń
mechatronicznych
Indukcja elektromagnetyczna
Indukcja elektromagnetyczna - zjawisko powstawania siły
elektromotorycznej w przewodniku na skutek zmian
strumienia pola magnetycznego.
Zmiana ta mo
ż
e by
ć
spowodowana zmianami pola
magnetycznego lub wzgl
ę
dnym ruchem przewodnika i
ź
ródła pola magnetycznego.
Zjawisko
to
zostało
odkryte
w
1831
roku
przez
angielskiego fizyka Michała Faradaya.
Zjawisko piezoelektryczne
Zjawisko piezoelektryczne lub efekt piezoelektryczny–
zjawisko fizyczne polegaj
ą
ce na:
• mechanicznej
deformacji
kryształu
pod
wpływem
zewn
ę
trznego
pola
elektrycznego
(zjawisko
piezoelektryczne odwrotne),
• powstawaniu na przeciwległych
ś
cianach kryształów
ładunków elektrycznych przeciwnego znaku w wyniku
deformacji kryształu (zjawisko piezoelektryczne proste).
Zjawisko piezoelektryczno
ś
ci zostało odkryte w 1880 r.
przez francuskich fizyków noblist
ę
Piotra i jego brata
Jacquesa Curie.
2013-05-28
9
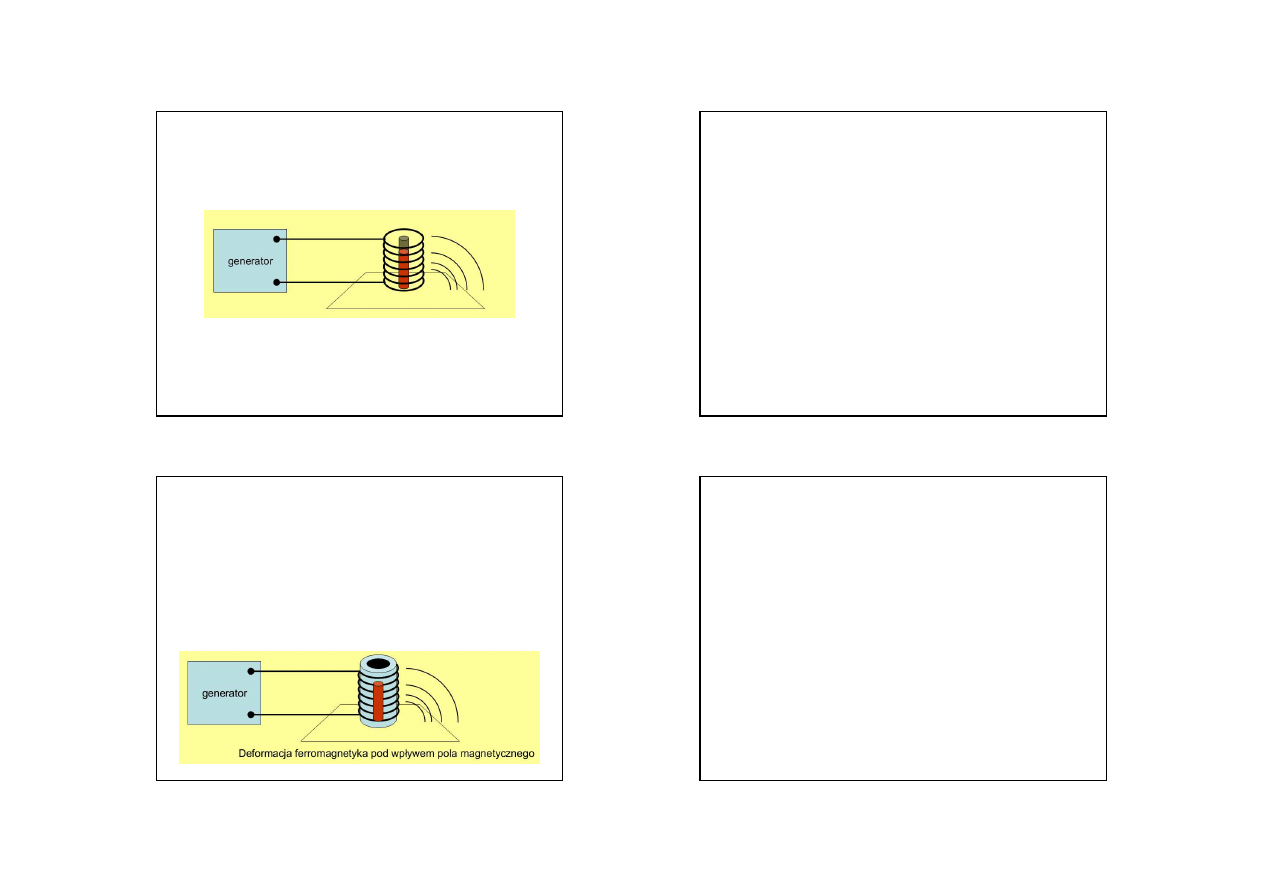
Zjawisko elektrostrykcji
Elektrostrykcja jest zjawiskiem polegaj
ą
cym na zmianie
wymiarów materiału pod wpływem pola elektrycznego
(napi
ę
cia).
Deformacja ferromagnetyka pod wpływem pola
elektrycznego
Zjawisko to charakteryzuje si
ę
tym,
ż
e zmiana wymiarów
zachodzi w jednym kierunku, niezale
ż
nie od kierunku
przyło
ż
onego pola elektrycznego (zjawisko proste).
Dipole w materiałach elektrostrykcyjnych uło
ż
one s
ą
w
sposób przypadkowy.
Wpływa to przy znacznej liczbie dipoli na u
ś
rednienie
wypadkowej warto
ś
ci polaryzacji do zera.
Z
powy
ż
szego
powodu
zachodzi
konieczno
ść
polaryzowania materiałów elektrostrykcyjnych.
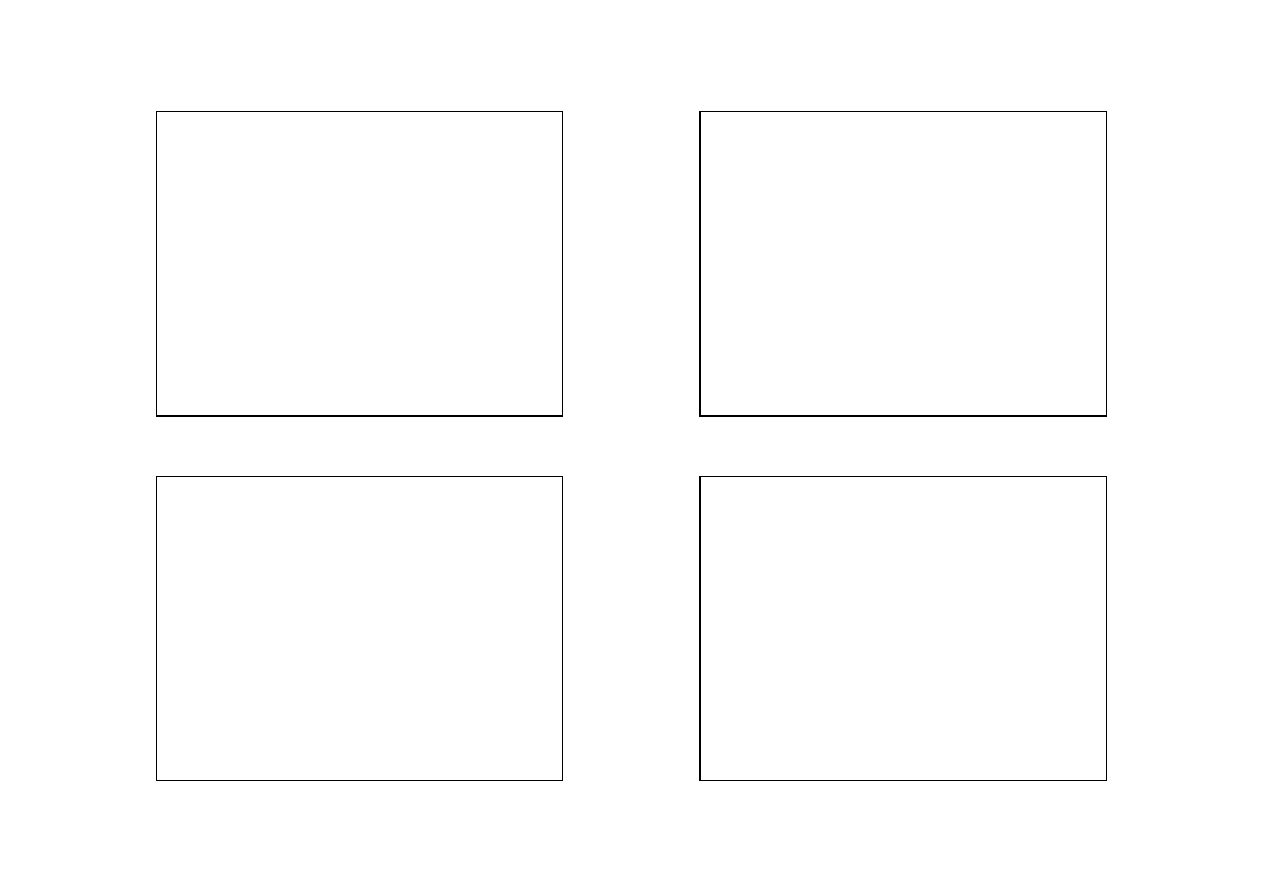
Zjawisko magnetostrykcji
Magnetostrykcja - zjawisko zmiany kształtu i rozmiarów
materiałów magnetycznych pod wpływem pola
magnetycznego
lub
przeciwnie
–
zjawisko
zmiany
własno
ś
ci magnetycznych pod wpływem przyło
ż
onej z
zewn
ą
trz
siły
wynika
z
samorzutnej
deformacji
prowadz
ą
cej do zmniejszenia energii anizotropii.
Zjawisko magnetostrykcji zostało odkryte przez Jamesa
Joula w 1842.
Efekt odwrotny nazywa si
ę
zjawiskiem Villari’ego, od
nazwiska jego odkrywcy.
Zmiana rozmiarów pod wpływem pola magnetycznego
mo
ż
e mie
ć
charakter liniowy lub obj
ę
to
ś
ciowy.
Efekt magnetostrykcji jest wykorzystywany m.in. w
generatorach ultrad
ź
wi
ę
ków.
Zjawisko odwrotne do magnetostrykcji wykorzystuje si
ę
w
precyzyjnych czujnikach ci
ś
nienia i napr
ęż
enia.
2013-05-28
10
Efekt Halla
Efekt Halla to zjawisko fizyczne, odkryte w 1879 roku
przez Edwina H. Halla.
Polega on na wyst
ą
pieniu ró
ż
nicy potencjałów w
przewodniku, w którym płynie pr
ą
d elektryczny, gdy
przewodnik znajduje si
ę
w poprzecznym do płyn
ą
cego
pr
ą
du polu magnetycznym.
Napi
ę
cie to, zwane napi
ę
ciem Halla, pojawia si
ę
mi
ę
dzy płaszczyznami ograniczaj
ą
cymi przewodnik
prostopadle
do
płaszczyzny
wyznaczanej
przez
kierunek pr
ą
du i wektor indukcji pola magnetycznego.
Jest ono spowodowane działaniem siły Lorentza na
ładunki poruszaj
ą
ce si
ę
w polu magnetycznym.
Zjawisko Gaussa (magnetorezystancja)
Magnetoopór,
tak
ż
e
zjawisko
Gaussa
-
zjawisko
polegaj
ą
ce na zmianie oporu metali i półprzewodników
pod wpływem pola magnetycznego.
W polu magnetycznym tor cz
ą
stki naładowanej zakrzywia
si
ę
, wi
ę
c droga, jak
ą
pokonuje cz
ą
stka ulega wydłu
ż
eniu.
Objawia si
ę
t o zmniejszeniem nat
ęż
enia pr
ą
du (wzrostem
oporu).
Zjawisko
Gaussa
wykorzystywane
jest
do
pomiaru
nat
ęż
enia pola magnetycznego.
Efekt Wieganda
Efekt Wieganda– to zjawisko fizyczne odkryte przez
Johna R. Wieganda.
Specjalny drut z rdzeniem z materiału magnetycznie
mi
ę
kkiego
oraz
otulinie
z
materiału
magnetycznie
mi
ę
kkiego, nazwany drutem Wieganda, posiada dzi
ę
ki
swojej
budowie
bistabiln
ą
charakterystyk
ę
magnesowania.
W skład czujnika wchodzi tak
ż
e cewka, a w trakcie
przemagnesowywania drutu zachodzi skok Barkhausena.
Zjawisko to znalazło zastosowanie w wielu czujnikach
pomiarowych, a zalet
ą
jego jest m.in. brak napi
ę
cia
zasilaj
ą
cego czujnik oraz zakres pracy od -70°C do
+200°C.
Zjawisko termoelektryczne
Zjawisko
termoelektryczne
-
efekt
bezpo
ś
redniej
transformacji
napi
ę
cia
elektrycznego wyst
ę
puj
ą
cego mi
ę
dzy dwoma punktami układu ciał na ró
ż
nic
ę
temperatur mi
ę
dzy tymi punktami, lub odwrotnie: ró
ż
nicy temperatur na napi
ę
cie
elektryczne.
W zale
ż
no
ś
ci od kierunku transformacji
zjawisko termoelektryczne
dzieli si
ę
na:
zjawisko Seebecka
- powstanie siły termoelektrycznej w
zamkni
ę
tym obwodzie składaj
ą
cym si
ę
z dwóch ró
ż
nych
metali, o ile miejsca styku tych metali znajduj
ą
si
ę
w
ró
ż
nych temperaturach,
efekt Peltiera
- gdy pr
ą
d elektryczny przepływa, przez
miejsce zł
ą
czenia dwóch ró
ż
nych metali, to zale
ż
nie od
kierunku przepływu zł
ą
cze to nagrzewa si
ę
lub ozi
ę
bia,
zjawisko Thomsona
- nagrzewanie lub ozi
ę
bianie pod
wpływem przepływu pr
ą
du wyst
ę
puj
ą
ce równie
ż
w
jednorodnym przewodniku, którego ko
ń
ce znajduj
ą
si
ę
w
ró
ż
nych temperaturach.
2013-05-28
11
Zjawisko termooptyczne
Zjawisko termooptyczne polega na zmianie koloru
odbijanego
ś
wiatła przez materiał w zale
ż
no
ś
ci od jego
temperatury.
Zastosowania własno
ś
ci termooptycznych - indykatory
temperatury (zmieniaj
ą
ce kolor przy
ś
ci
ś
le okre
ś
lonej
temperaturze).
Efekt Pockelsa (fotospr
ęż
ysto
ść
)
Efektem Pockelsa nazywa si
ę
liniowy efekt elektrooptyczny,
czyli inaczej mówi
ą
c dwójłomno
ść
wymuszon
ą
.
Zjawisko polega na zmianie współczynnika załamania
ś
wiatła
proporcjonalnie do zewn
ę
trznego pola elektrycznego.
Wyst
ę
puje tylko w kryształach, które nie wykazuj
ą
symetrii
inwersji (a wi
ę
c wykazuj
ą
efekt piezoelektryczny).
Aby zaobserwowa
ć
efekt Pockelsa nale
ż
y przyło
ż
y
ć
pole
elektryczne do kryształu równolegle do propaguj
ą
cego si
ę
promienia
ś
wiatła.
Efekt został odkryty przez Friedricha Carla Alwina Pockelsaw
1893 roku.
Zjawisko fotowoltaiczne
Zjawisko fotowoltaiczne (efekt fotowoltaiczny) - zjawisko
polegaj
ą
ce na powstaniu siły elektromotorycznej w ciele
stałym pod wpływem promieniowania
ś
wietlnego.
W zwi
ą
zku z tym nale
ż
y do zjawisk fotoelektrycznych
wewn
ę
trznych.
Zjawisko fotowoltaiczne jako pierwszy zauwa
ż
ył w roku
1839 Aleksander Edmund Becquerel.
Zjawisko to jest wykorzystywane w ogniwach
fotowoltaicznych, które coraz cz
ęś
ciej zast
ę
puj
ą
inne
rodzaje
ź
ródeł energii.
Zjawisko Faradaya
Zjawisko Faradaya(zjawisko magnetooptyczne) – polega na
obrocie (o pewien k
ą
t) płaszczyzny polaryzacji
ś
wiatła
spolaryzowanego liniowo w czasie przechodzenia
ś
wiatła
przez o
ś
rodek, w którym istnieje pole magnetyczne.
Zjawisko zostało odkryte przez Michaela Faradaya w 1845 r. i
było pierwszym eksperymentem ujawniaj
ą
cym zwi
ą
zek
ś
wiatła
z magnetyzmem.
2013-05-28
12
Efekt fotoelektryczny
Efekt fotoelektryczny(zjawisko fotoelektryczne, fotoefekt) –
zjawisko fizyczne polegaj
ą
ce na
• emisji elektronów z powierzchni przedmiotu (zjawisko
fotoelektryczne zwane równie
ż
zjawiskiem fotoelektrycznym
zewn
ę
trznym dla odró
ż
nienia od wewn
ę
trznego);
• przeniesieniu no
ś
ników ładunku elektrycznego pomi
ę
dzy
pasmami energetycznymi (tzw. zjawisko fotoelektryczne
wewn
ę
trzne), w wyniku na
ś
wietlania promieniowaniem
elektromagnetycznym (na przykład
ś
wiatłem widzialnym) o
odpowiedniej
cz
ę
stotliwo
ś
ci,
zale
ż
nej
od
rodzaju
przedmiotu.
Emitowane w zjawisku fotoelektrycznym elektrony nazywa
si
ę
czasem fotoelektronami.
Energia kinetyczna fotoelektronów nie zale
ż
y od nat
ęż
enia
ś
wiatła a jedynie od jego cz
ę
stotliwo
ś
ci.
Gdy o
ś
wietlanym o
ś
rodkiem jest gaz, zachodzi zjawisko
fotojonizacji, gdy zachodzi zjawisko fotoelektryczne
wewn
ę
trzne mówi si
ę
o fotoprzewodnictwie.
Efekt fotoelektryczny jest powszechnie wykorzystywany w
fotokomórkach, bateriach słonecznych, fotopowielaczach,
noktowizorach, elementach CCD w aparatach cyfrowych,
fotodiodach, itd.
Zjawisko fotoprzewodnictwa
Fotoprzewodnictwo jest to zmiana przewodnictwa
elektrycznego materiału pod wpływem promieniowania
ś
wietlnego.
Ma ono miejsce gdy energia fotonów promieniowania
ś
wietlnego padaj
ą
cego na półprzewodnik jest wi
ę
ksza ni
ż
Szeroko
ść
pasma zabronionego nast
ę
puje przechodzenie
elektronów do pasma przewodnictwa i zwi
ę
kszenie si
ę
konduktywno
ś
ci półprzewodnika.
Najwi
ę
ksza długo
ść
fali promieniowania wywołuj
ą
cego
efekt fotoprzewodnictwa nazywa si
ę
długo
ść
progow
ą
fali
i
jest
zale
ż
na
od
szeroko
ś
ci
pasma
zabronionego
półprzewodnika.
Efekt Dopplera
Efekt Dopplera-zjawisko obserwowane dla fal, polegaj
ą
ce na
powstawaniu ró
ż
nicy cz
ę
stotliwo
ś
ci wysyłanej przez
ź
ródło
fali oraz zarejestrowanej przez obserwatora, który porusza si
ę
wzgl
ę
dem
ź
ródła fali.
Dla fal rozprzestrzeniaj
ą
cych si
ę
w o
ś
rodku, takich jak na
przykład
fale
d
ź
wi
ę
kowe,
efekt
zale
ż
y
od
pr
ę
dko
ś
ci
obserwatora oraz
ź
ródła wzgl
ę
dem o
ś
rodka, w którym te fale
si
ę
rozchodz
ą
.
W przypadku fal propaguj
ą
cych si
ę
bez udziału o
ś
rodka
materialnego, jak na przykład
ś
wiatło w pró
ż
ni (w ogólno
ś
ci
fale elektromagnetyczne), znaczenie ma jedynie ró
ż
nica
pr
ę
dko
ś
ci
ź
ródła oraz obserwatora.
2013-05-28
13
Nastawnikiem (aktuatorem - ang. actuator)
nazywa się
urządzenie, które umożliwia wykonanie pewnej pracy poprzez
przetworzenie
sygnału
sterującego
w
postaci
wielkości
elektrycznej
na
proporcjonalną
wielkość
nieelektryczną(przemieszczenie, temperatura, siła).
Nastawniki są przeciwieństwem czujników, gdzie poddawana
jest
konwersji
określona
wielkość
fizyczna
na
wielkość
elektryczną.
Zamiana energii elektrycznej na inny rodzaj energii,
np. na energię mechaniczną, którą można wykorzystać np. do
napędzania różnego rodzaju elementów.
2013-05-28
14
Aktuatory hydrauliczne i pneumatyczne
Siłowniki liniowe (ruch posuwisto-zwrotny)
Siłowniki o ruchu wahadłowym (
obrotowe o ograniczonym zakresie obrotu
)
Silniki (o nieograniczonym zakresie obrotu)
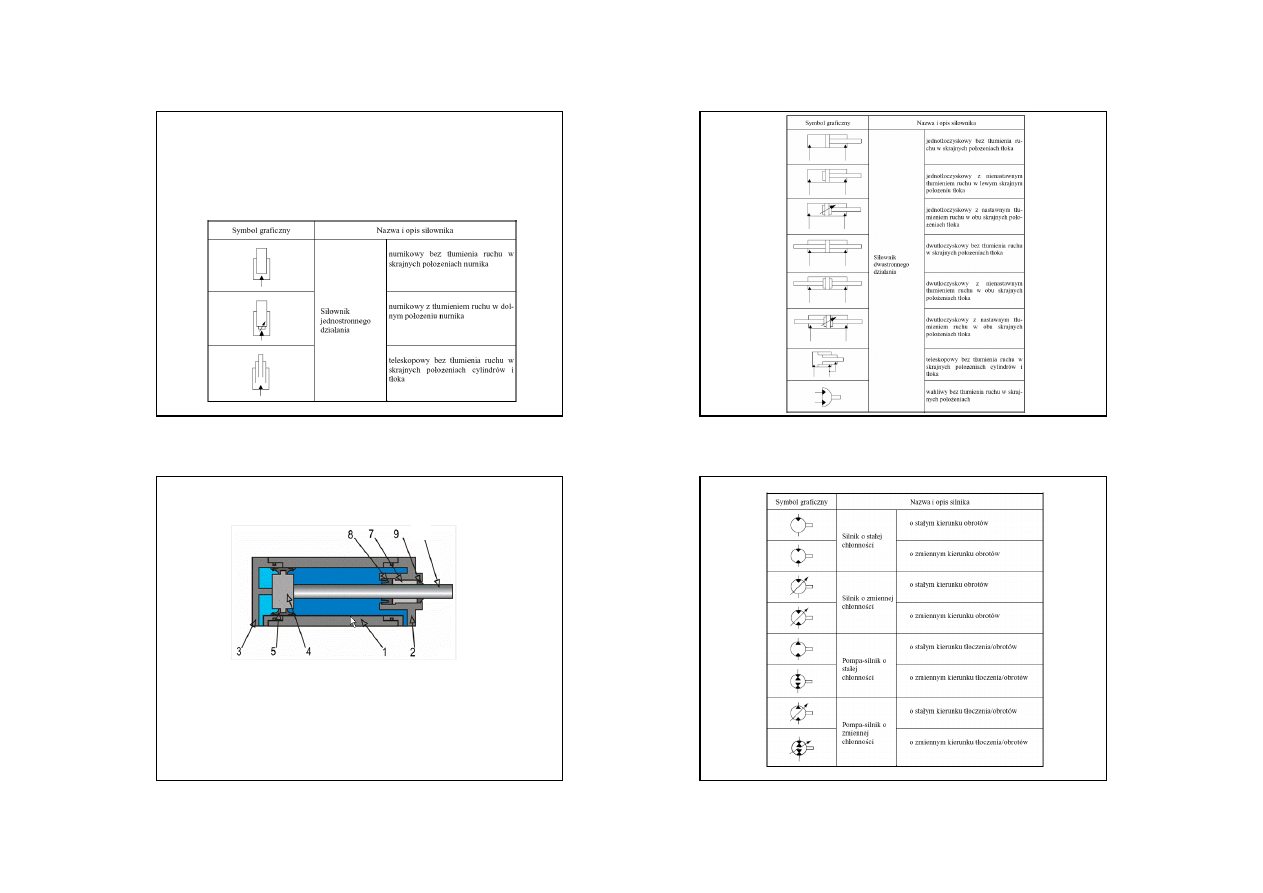
Podstawowe części siłownika tłokowego
1- tuleja cylindryczna, 2 – pokrywa przednia, 3 – pokrywa tylna, 4- tłok,
5- pierścień uszczelniający połączenie ruchowe tłoka, 6 –tłoczysko, 7 – tuleja
prowadząca tłoczysko, 8 pierścień uszczelniający umieszczony w pokrywie
przedniej, 9 – pierścień zgarniający
6
Chłonność – ilość cieczy roboczej pobranej z przewodu tłocznego w jednostce czasu
Symbole graficzne silników obrotowych
2013-05-28
15
Między pompą a silnikiem hydraulicznym lub siłownikiem
występują różnorodne elementy sterujące. Elementy te - nazywane
inaczej
zaworami
- przeznaczone są. do spełniania bardzo
zróżnicowanych funkcji.
Przykładowo można wymienić następujące funkcje (zadania):
•
uruchomienie, zatrzymanie i zmiana kierunku ruchu silnika lub
siłownika.
• sterowanie natężeniem przepływu. a więc najczęściej sterowanie
prędkością rozwijaną przez silnik lub siłownik.
• sterowanie ciśnieniem, a więc najczęściej sterowanie rozwijanym
momentem obrotowym lub siłą.
• zabezpieczenie układu przed przeciążeniem technologicznym lub
bezwładnościowym.
• blokada położenia obciążonego silnika lub siłownika.
•
synchronizacja
ruchów
kilku
silników
obciążonych
w
zróżnicowany sposób i zasilanych z jednego źródła.
Elementy sterujące - ze względu na spełniane funkcje – można
podzielić na następujące grupy:
1. Elementy sterujące kierunkiem przepływu.
2. Elementy sterujące ciśnieniem.
3. Elementy sterujące natężeniem przepływu.
4. Elementy wielofunkcyjne.
5. Elementy sterujące kierunkiem i natężeniem przepływu.
ROZDZIELACZE
Zadaniem
rozdzielaczy
-
nazywanych
niekiedy
zaworami
rozdzielczymi - jest doprowadzenie i odprowadzenie cieczy z gałęzi
układu
hydrostatycznego,
sterowane
sygnałem
zewnętrznym.
Najczęściej rozdzielacz służy do połączenia silnika hydraulicznego
lub siłownika z pompą, i zbiornikiem, a więc do sterowania pracą
silnika lub siłownika.
Najbardziej
rozpowszechnione
są
rozdzielacze
suwakowe
sterowane
elektrycznie,
przy
czym
stosowane
w
nich
elektromagnesy klasyfikujemy w następujący sposób:
Ze względu na rodzaj prądu rozróżniamy
1. Elektromagnesy prądu stałego.
2. Elektromagnesy prądu zmiennego.
Ze względu na kontakt elektromagnesów z olejem rozróżniamy
1. Elektromagnesy suche.
2. Elektromagnesy mokre.
• piezoelektryczne & elektrostrykcyjne
• magnetostrykcyjne
• z pamięcią kształtu
(SMA - Shape Memory Alloy)
• elektroreologiczne
przy przyłożeniu pola elektrycznego niektóre ciecze wykazują zwiększenie lepkości
• magnetoreologiczne
przy przyłożeniu pola magnetycznego niektóre ciecze wykazują zwiększenie lepkości
•magnetyczne materiały adaptacyjne
Materiały inteligentne
Smart Material SM
Aktuatory nowego rodzaju
2013-05-28
16
Aktuatory
piezoelektryczne
wykorzystują
zjawisko
odkształcenia kryształu pod wpływem przyłożonego napięcia.
Wartość odkształcenia piezoelektrycznego zależy liniowo od
natężenia pola elektrycznego.
Materiały piezoelektryczne
-Kwarc–budowa
heksagonalna,
materiał
jednorodny,
anizotropowe właściwości mechaniczne i elektryczne, mała
higroskopijność. Tc=576st.C, stały efekt piezo do temp=200 st.C.
-Turmalin – kamień szlachetny, wysoka cena, wykorzystywany
w specjalistycznych aparaturach.
-Sól Rochelle – dobre własności piezo, mała odporność na
wilgoć,
konieczność
stosowania
smarów
i
lakierów
do
zabezpieczenia przez co zmniejsza się efekt
-fosforan amonu, siarczan litu oraz niobian litu ale ich
wykorzystanie w praktyce ogranicza się jedynie do zastosowań w
wyspecjalizowanych badaniach fizycznych
Materiały piezoelektryczne –ceramika piezoelektryczna
-tytanian baru BaTiO3 Powstaje przez spiekanie w temperaturze
140°C tlenków metali z grupy tytanowców –tytanu i cyrkonu z
tlenkami baru, ołowiu, litu + dodatki. Tc=120 st. C; tania w
otrzymaniu.
-PZT -spiek cyrkonianu ołowiu z tytanianem baru; najszerzej
stosowana, miękka i twardza, Tc=350 st.C, dużą dobrocią
mechaniczna Qm, wysokim oporem właściwym, wysoką i stabilną
przenikalność
dielektryczną,
wykorzystywana
w
wielu
urządzeniach technicznych.
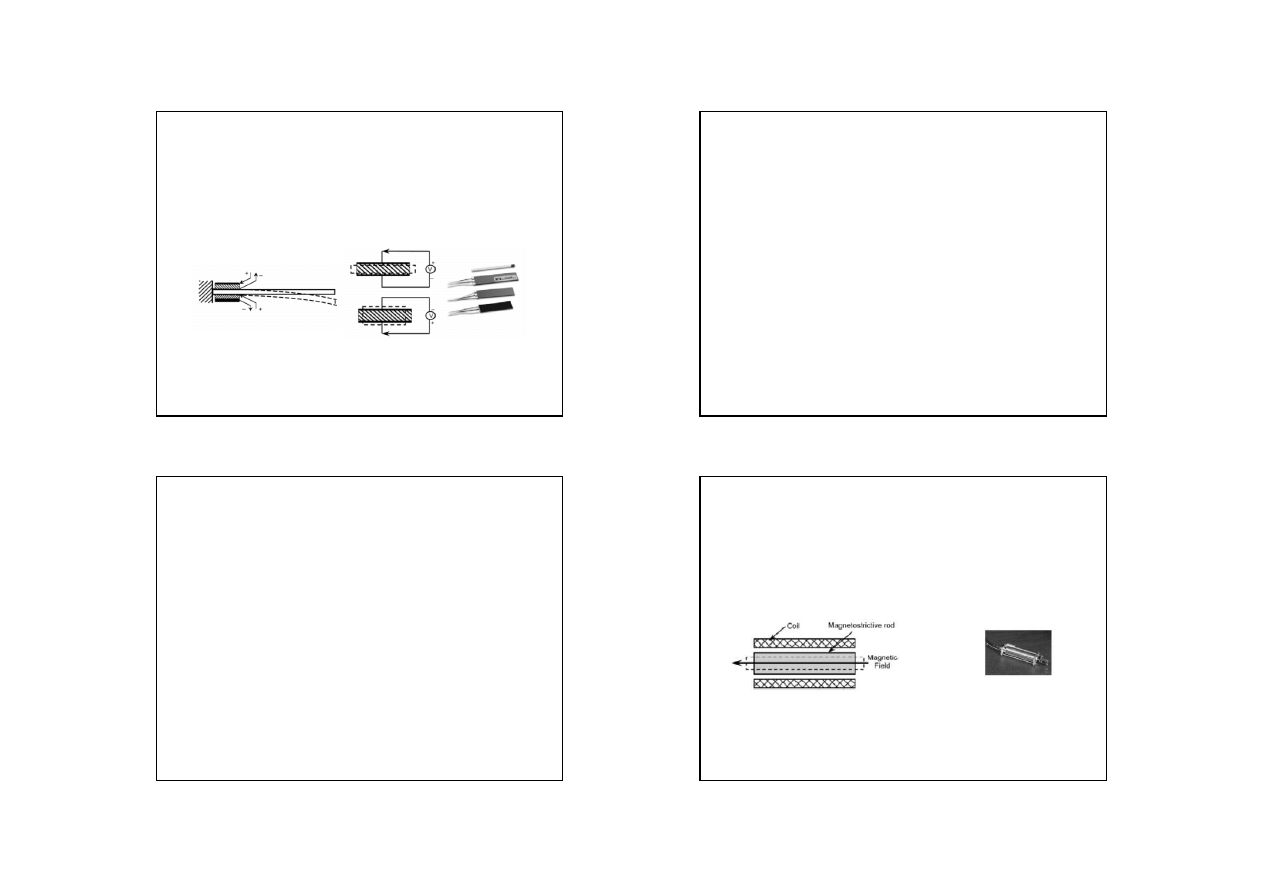
Aktuatory
magnetostrykcyjne
wykorzystują
zjawisko
magnetostrykcji polegające na zmianie wymiarów materiału
ferromagnetycznego pod wpływem pola magnetycznego
2013-05-28
17
Aktuatory
wykorzystujące materiały z pamięcią kształtu
(SMA
- Shape Memory Alloy)
Materiały z pamięcią kształtu (gł. stopy metali) charakteryzują
się tym, że przedmioty z nich wykonane, o określonym kształcie
pierwotnym, odkształcone plastycznie, powracają do stanu
(kształtu) wyjściowego pod wpływem temperatury.
Najczęściej są stosowane stopy Ni-Ti oraz stopy na bazie miedzi
Cu-Al-Zn oraz Cu-Al-Ni.
Aktuatory elektroreologiczne
przy przyłożeniu pola elektrycznego niektóre ciecze wykazują
zwiększenie lepkości
Aktuatory magnetoreologiczne
przy przyłożeniu pola magnetycznego
niektóre
ciecze
wykazują zwiększenie lepkości
zastosowanie
sprzęgła przełączające, zawory, łożyska silników, tłumiki uderzeń
aktuatory ruchu:
-ruchu obrotowego (silniki elektryczne),
-przemieszczenia liniowego
W mechatronice stosowane s
ą
tzw. mikrosilniki elektryczne.
Wyst
ę
puj
ą
w trzech głównych odmianach:
• silniki pr
ą
du stałego,
• silniki skokowe,
• miniaturowe silniki pr
ą
du przemiennego.
Silniki pr
ą
du stałego mog
ą
by
ć
komutowane mechanicznie
(szczotkowo) lub elektronicznie.
Silniki pr
ą
du przemiennego mog
ą
by
ć
równie
ż
komutowane
szczotkowo. Cz
ęść
z nich nie posiada komutatora wykorzystuj
ą
c
wiruj
ą
ce pole magnetyczne.
Silniki skokowe z reguły komutowane s
ą
elektronicznie.
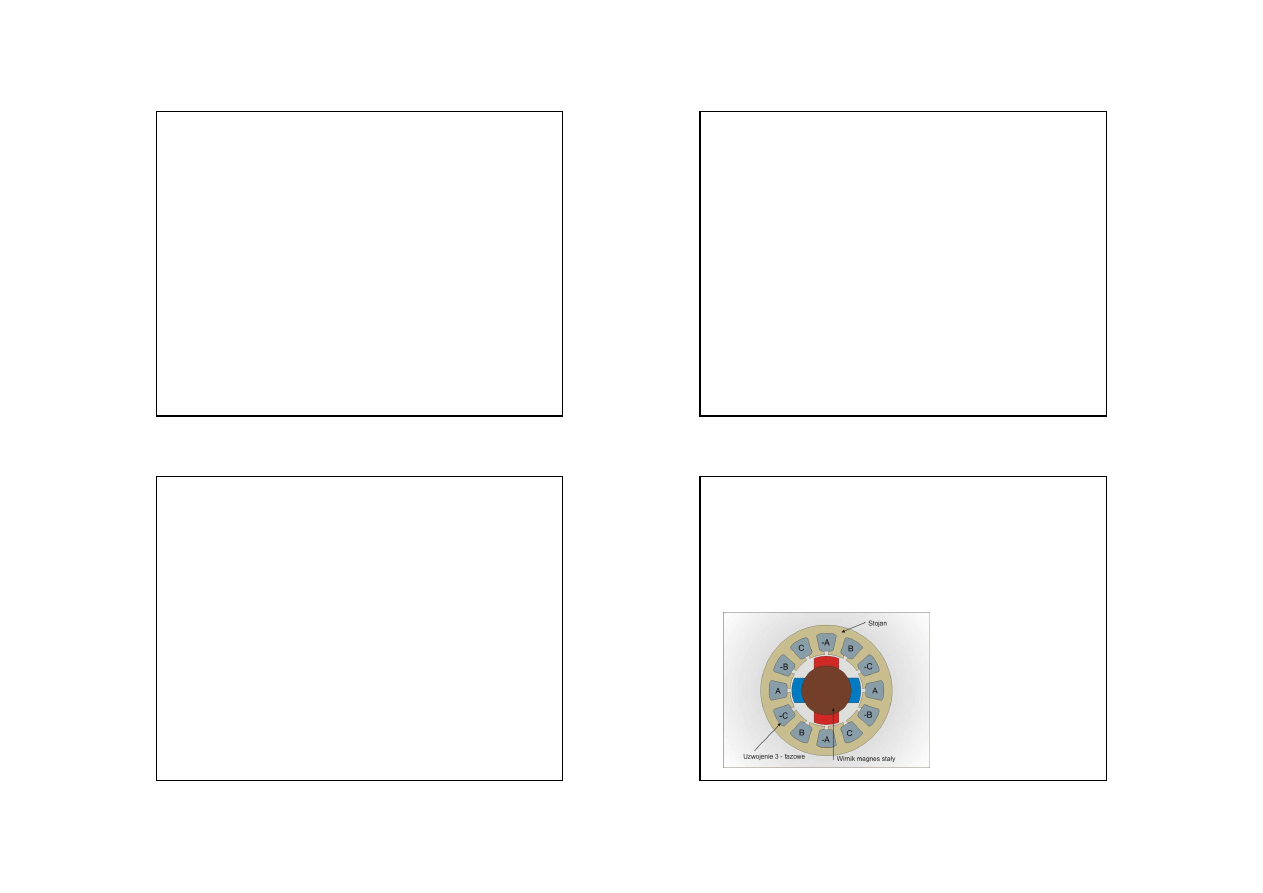
Budowa silnika BLDC jest odwróceniem budowy klasycznego silnika
prądu stałego z magnesami trwałymi, w którym uzwojony jest wirnik a
pole magnetyczne wzbudza magnes trwały w stojanie. Za przełączanie
pomiędzy fazami odpowiedzialny jest mechaniczny komutator. W silniku
BLDC uzwojony jest stojan, pole magnetyczne wymusza umieszczony
w wirniku magnes trwały. Komutator jest zastąpiony elektronicznym
przełącznikiem, którego stan jest określony funkcją położenia wirnika
BLDC
Ideowa budowa BLDC

2013-05-28
18
Rodzaje silników BLDC
1. Silniki z wirnikiem wewnętrznym
Silniki z wirnikiem wewnętrznym z pośród silników BLDC mają najbardziej
zbliżoną konstrukcję do silników indukcyjnych prądu zmiennego.
Zaleta - duża wartość stosunek momentu obrotowego do momentu
bezwładności.
Wada jest potrzeba bardzo dokładnego umocowania magnesów w
procesie produkcji. Trzeba zadbać by wirnik nie uległ uszkodzeniu
w wyniku działania dużej siły odśrodkowej. Wirnik często jest
owijany Kevlarową przędzą utrzymującą magnesy. Dotyczy to
głównie silników wysokoobrotowych.
2. Silniki z wirnikiem zewnętrznym
wykorzystują magnesy ferrytowe, w produkcji są najmniej kosztochłonne.
Stojan, podobnie jak wirnik, w silnikach komutatorowych prądu stałego,
jest wykonany z pakietów blach. Wirnik zbudowany jest z miękkiego żelaza i
kształtem przypomina kubek.
Przekrój
Wirnik
przypomina
kubek
Najbardziej znaną odmianą silników BLDC z wirnikiem
zewnętrznym, są wentylatory używane do chłodzenia, głównie
komponentów elektronicznych, takich jak procesory, płyty
główne itp.
3. Silnik bezżłobkowy
Stojan silników bezżłobkowych BLDC zbudowany jest z pakietowanych
blach o kształcie pierścienia (stojan kształtem przypomina pusty w środku
walec). Uzwojenie jest nawijane spiralnie dzięki czemu, ze względu na brak
żłobków, miejsca jest praktycznie dwa razy więcej. Takie rozwiązanie
pozwala zmniejszyć straty w miedzi. Niestety przez dużą szczelinę
powietrzną, redukcji ulega również gęstość strumienia magnetycznego co
powoduje zwiększenie poboru prądu i większą temperaturę. Brak
dodatkowych przewodników cieplnych, którymi w normalnych silnikach, są
żłobki wymusza potrzebę dodatkowego chłodzenia, najczęściej cieczą.
Silniki prądu stałego z magnesami trwałymi są zasilane prądem zmiennym o
przebiegu sinusoidalnym lub prostokątnym. Układ sterujący silnikiem w obu
przypadkach jest praktycznie taki sam, zmienia się tylko algorytm sterowania
poszczególnych tranzystorów.
Aby uzyskać sinusoidalny przebieg prądu stosuje się sterowanie szerokością
impulsów „PWM”.
Układ sterujący odpowiednio włącza i wyłącza źródło napięcia stałego, w zależności
od sygnału z regulatora prądowego, tak żeby przez uzwojenie płynął prąd o kształcie
przypominającym sinusoidę.
W przypadku sterowania przebiegiem prostokątnym, przepływ prądu sterowany jest
tranzystorem załączanym co 60 stopni elektrycznych. Napięcie na uzwojeniu
zmienia się skokowo
2013-05-28
19
MEMS
Dorota Stachowiak 2008
Nowe technologie w mechatronice
MEMS'y
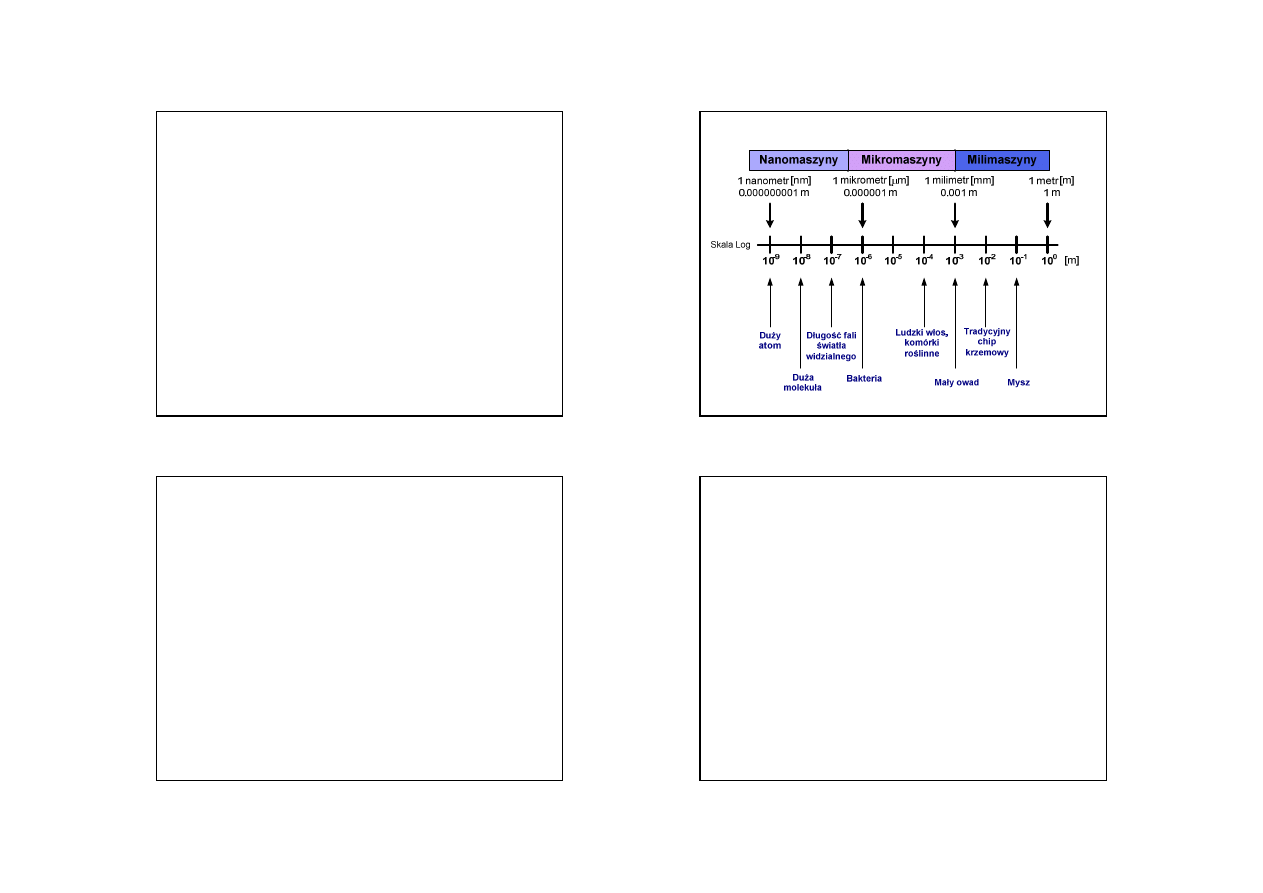
- Mikro Elektro-Mechaniczne Systemy
zintegrowane urządzenia elektryczno-elektroniczno-mechaniczne, o
wielkości od kilku do kilkuset mikronów (mikrometrów mm) tzn.
rzędu średnicy ludzkiego włosa lub ziarnka piasku, mogące
przetwarzać różne wielkości mechaniczne (np. ciśnienia,
przyspieszenia)
na wielkości elektryczne (np. napięcia, natężenia prądu)
i odwrotnie.
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Mikrosystemy w otoczeniu geometrycznym
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Przykłady aktualnych i przyszłych zastosowań MEMS'ów
Zastosowania cywilne
Inwazyjne i nieinwazyjne czujniki w biologii i medycynie
Miniaturowe przyrządy analityczne w biochemii
Sprzęt kardiologiczny
Urządzenia do wstrzykiwania leków (np. insuliny)
Sprzęt neurologiczny
Diagnostyka i sterowanie silników
Zautomatyzowane układy bezpieczeństwa, hamowania i zawieszenia w
samochodach
Elementy sieci światłowodowych
Pamięci komputerów
Przetwarzanie sygnałów elektromechanicznych
Urządzenia do monitorowania i diagnozowania konstrukcji
Układy sterowania stosowane w aerodynamice i hydrodynamice
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Przykłady aktualnych i przyszłych zastosowań MEMS'ów
Zastosowania wojskowe
Systemy nawigacyjne
Układy obserwacyjno-celownicze
Zapalniki
Układy rozpoznania swój-obcy
Noktowizory
Układy diagnostyczne
Układy sterowania i rozpoznania w miniaturowych samolotach bezzałogowych
Przetwarzanie sygnałów w urządzeniach łączności
Aktywne sterowanie kształtem powierzchni aerodynamicznych
2013-05-28
20
Półprzewodnikowe układy mechaniczne (MEMS) -
Skrót od ang. Micro-Electro-Mechanical Systems
Integracja w skali mikro:
•
elementów mechanicznych
•
sensorów
•
elementów wykonawczych
•
elementów elektronicznych na wspólnym np. krzemowym
podłożu
(dający
możliwość
realizacji
pełnego
układu
elektroniczno-mechanicznego)
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Mikrosystem krzemowo – szklany
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Schemat blokowy mikrosystemu
2013-05-28
21
Dorota Stachowiak 2008
Nowe technologie w mechatronice
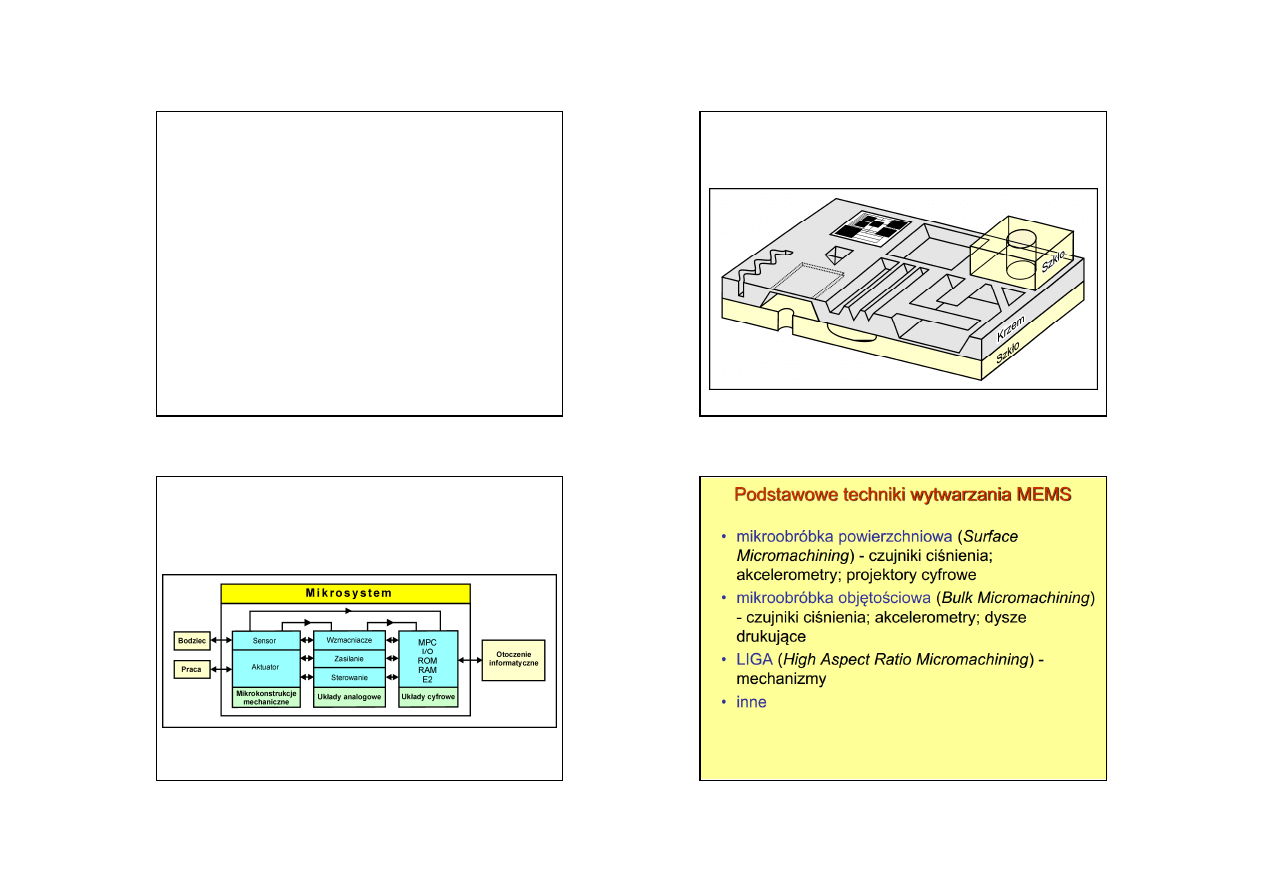
Mikromechanika powierzchniowa, zasada procesu
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Procesy
fotolitograficzne
pozwalają
na
nadawanie
obszarom
domieszkowanym, dielektrycznym i przewodzącym wymaganych
położeń, kształtów i wymiarów.
Wykorzystywana
jest
tu
wrażliwość
niektórych
związków
chemicznych na promieniowanie elektromagnetyczne.
Istnieją substancje, które pod wpływem tego promieniowania ulegają
utwardzeniu – tzw. emulsje fotolitograficzne (zwane też potocznie
fotorezystami) negatywowe.
Inne substancje z kolei pod wpływem promieniowania stają się łatwo
rozpuszczalne. Można ich użyć jako fotorezystów pozytywowych.
Dorota Stachowiak 2008
Nowe technologie w mechatronice
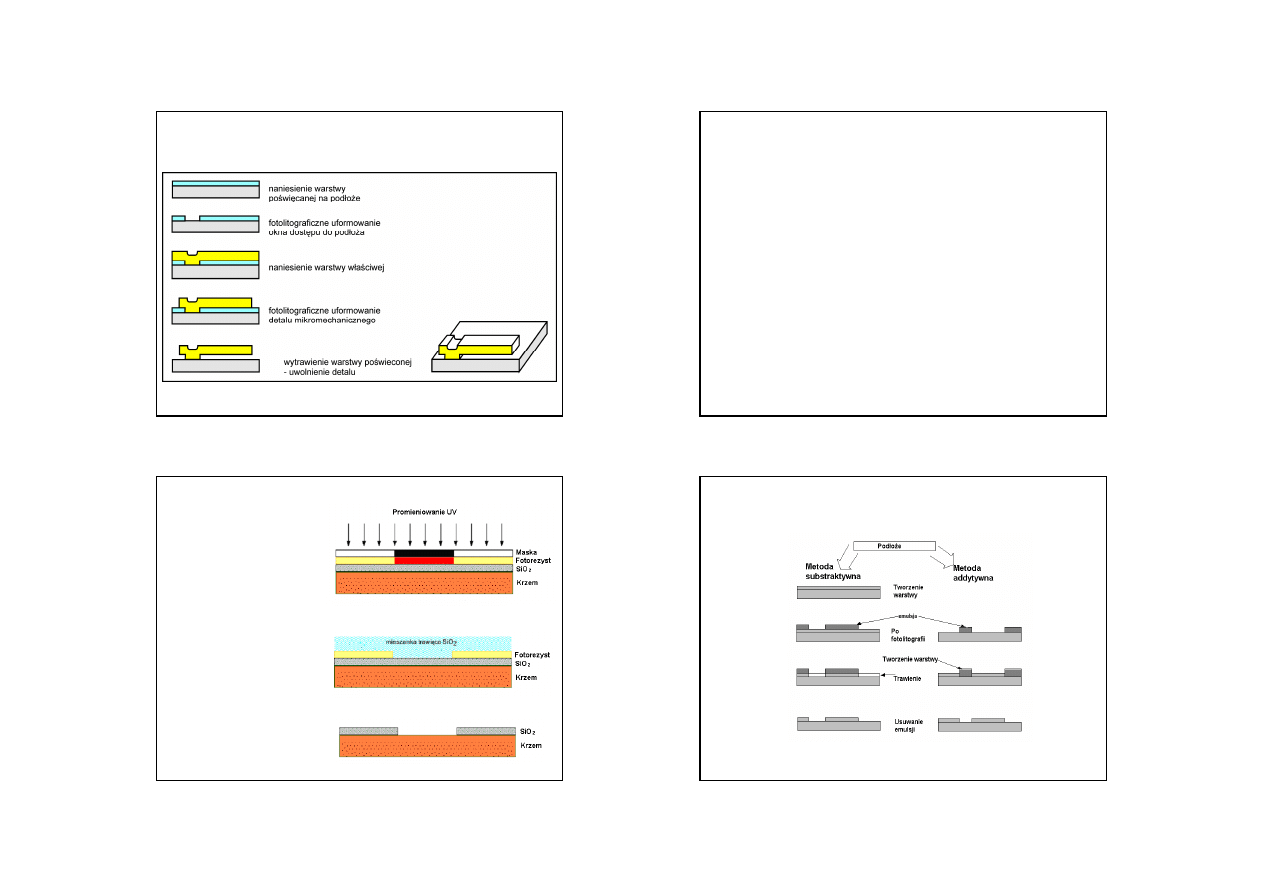
Zasada fotolitografii
a) Naświetlanie
fotorezystu
negatywowego przez
maskę:
b) Wytrawianie SiO
2
przez okno w fotorezyście
(po wywołaniu):
c) Wytrawione okno w SiO
2
:
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Metody odwzorowania kształtu w fotolitografii
2013-05-28
22
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Metoda LIGA
Technologia ta pozwala na „rzeźbienie” mikrostruktur za pomocą
intensywnej wiązki światła. LIGA jest dość kosztowna, ze względu
na konieczność wykorzystania synchrotronu.
Synchrotron
jest
akceleratorem
kołowym
cząstek
naładowanych,
z polem magnetycznym wzrastającym wraz z energią cząstek. Użycie synchrotronu
pozwala jednak na uzyskanie wysokiej precyzji tworzenia płaszczyzn struktury
przy jednoczesnej dużej powtarzalności kształtów poszczególnych elementów.
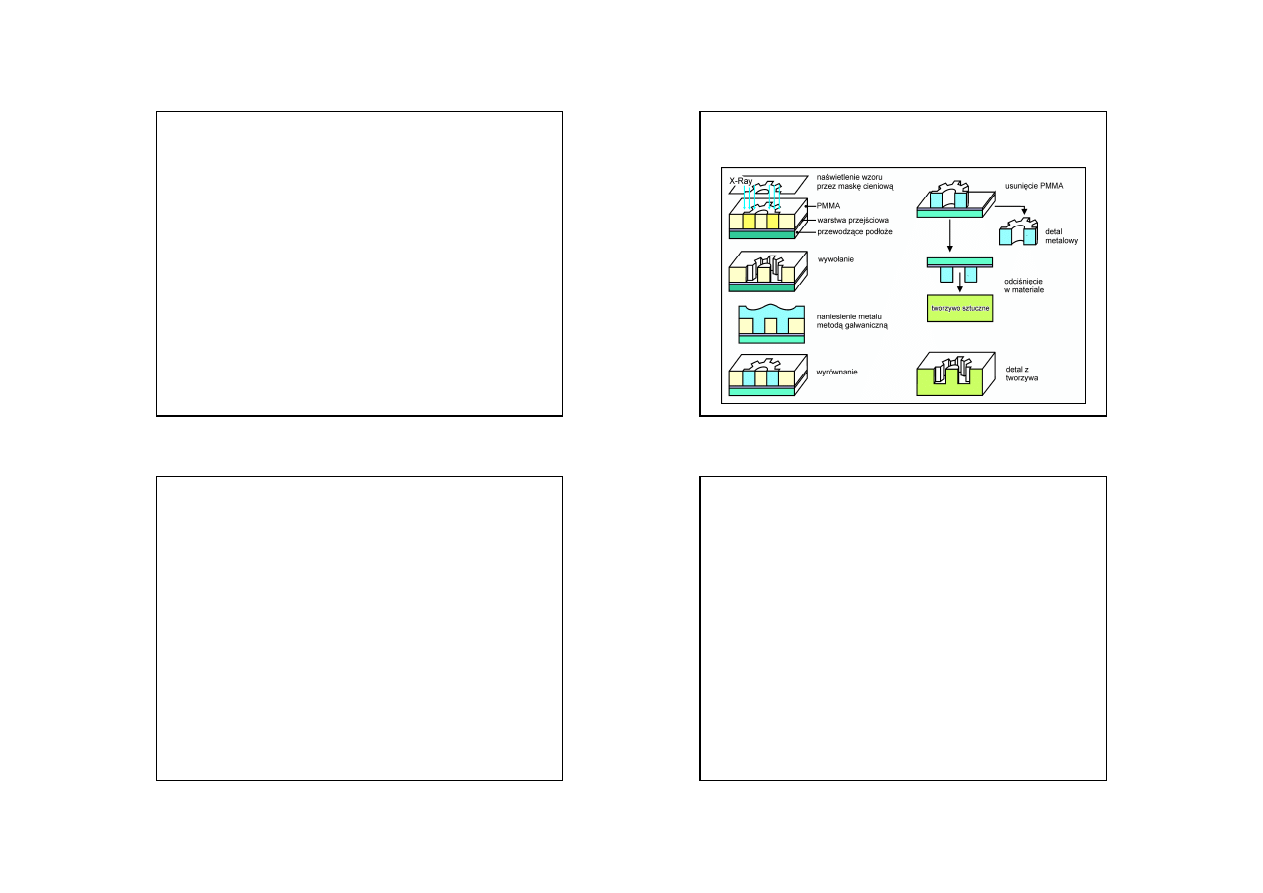
LIGA polega na wykorzystaniu trzech kolejno stosowanych
procesów – litograficznego przygotowania formy, galwanicznego
wypełnienia metalem w celu przygotowania trwałej formy, która
ostatecznie jest wykorzystywana do wielokrotnego wytwarzania
danej mikrostruktury
Dorota Stachowiak 2008
Nowe technologie w mechatronice
LIGA, zasada procesu
Li
tographie (litografia),
G
alvanoformung (galwanoformowanie),
A
bformung (formowanie) –
LIGA
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Do tworzenia mikromechanizmów krzemowych wykorzystuje się
następujące technologii:
• fotolitografia
• nakładanie cienkich warstw
• wytrawianie chemiczne
• wytrawianie plazmowe
• metoda LIGA i jej odmiany
• metody specjalistyczne będące kombinacją technik
podstawowych
Proces wytwarzania mikromechanizmów czy mikrosilników
obejmuje zazwyczaj kilka z powyższych technologii.
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Typowy proces wytwarzania mikrosilnika krzemowego
Etap pierwszy
Następuje naniesienie na „grube” w stosunku do całości silnika
krzemowe (silikonowe) podłoże warstwy 1 µm dwutlenku krzemu i
warstwy 1 µm azotku krzemu. Powstała w ten sposób struktura ma za
zadanie zapewnić izolację elementów mikrosilnika od podłoża.
Etap drugi
Nałożenie warstwy polisilikonu o grubości 350 nm. Warstwa ta jest
domieszkowana i kształtowana za pomocą pionowego trawienia w
taki sposób aby utworzyła tarczę pod wirnikiem.
Etap trzeci
Następuje naniesienie warstwy dwutlenku krzemu o grubości 2,3 µm i
ukształtowanie z niej przez trawienie przestrzeni pomiędzy tarczą a
wirnikiem.
2013-05-28
23
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Etap czwarty
Utworzenie, przez trawienie głównej warstwy polisilikonu, kształtu
wirnika i biegunów stojana.
Etap piąty
Następuje formowanie przestrzeni pomiędzy wirnikiem a piastą, która
pełni rolę łożyska ślizgowego, na którym obraca się wirnik, przy
pomocy następnej warstwy dwutlenku krzemu o grubości 300 nm.
Etap szósty
Ukształtowanie piasty z warstwy polisilikonu o grubości 1 µm.
Etap siódmy
Następuje „uwolnienie” wirnika za pomocą trawienia anizotropowego
warstwy dwutlenku krzemu.
Typowy proces wytwarzania mikrosilnika krzemowego
Dorota Stachowiak 2008
Nowe technologie w mechatronice
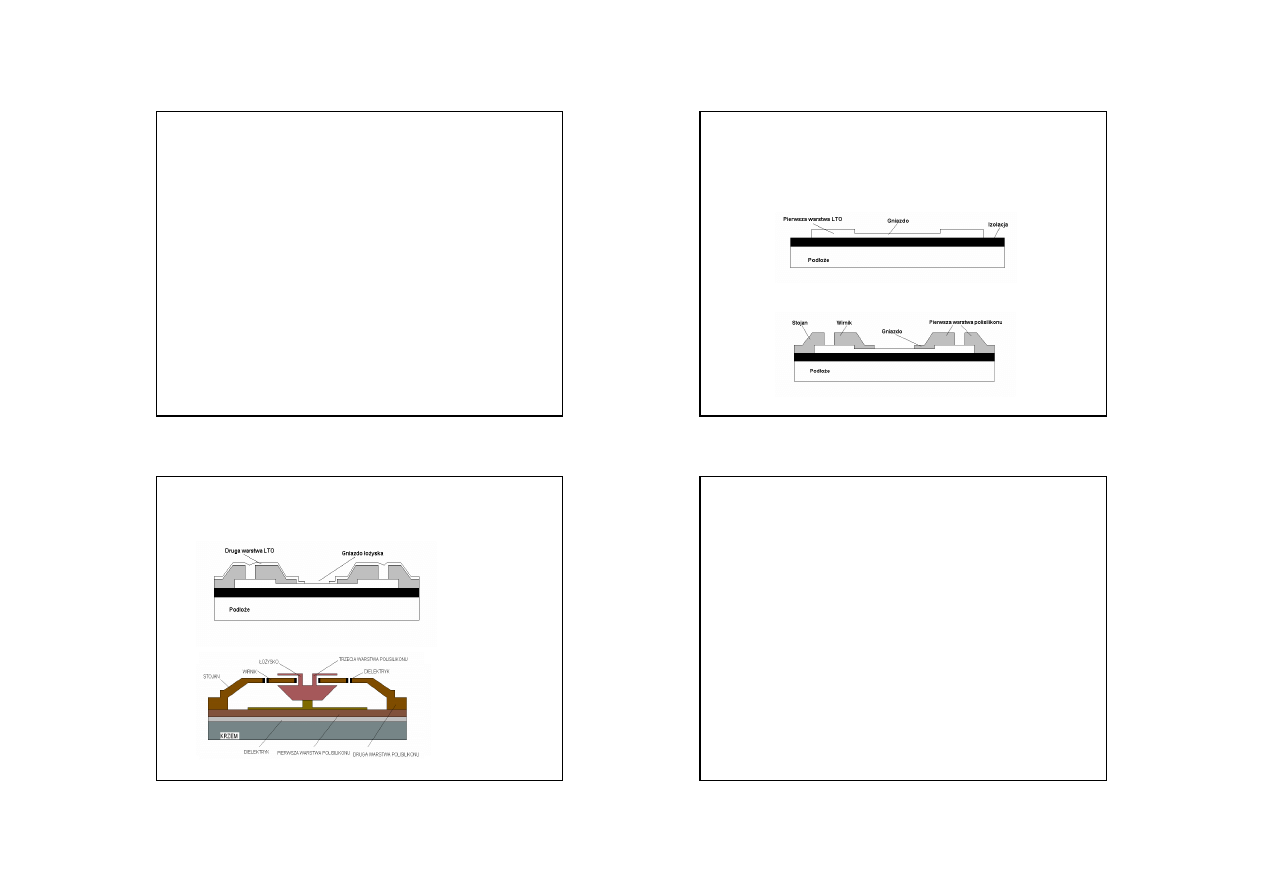
Schemat etapów wytwarzania mikrosilnika krzemowego
a) Nałożenie pierwszej warstwy:
b) Ukształtowanie stojana i wirnika:
Cały proces opiera się na wykorzystaniu warstw niskotemperaturowego tlenu (Low
Temperture Oxide – LTO), które są usuwane na końcu procesu.
Dorota Stachowiak 2008
Nowe technologie w mechatronice
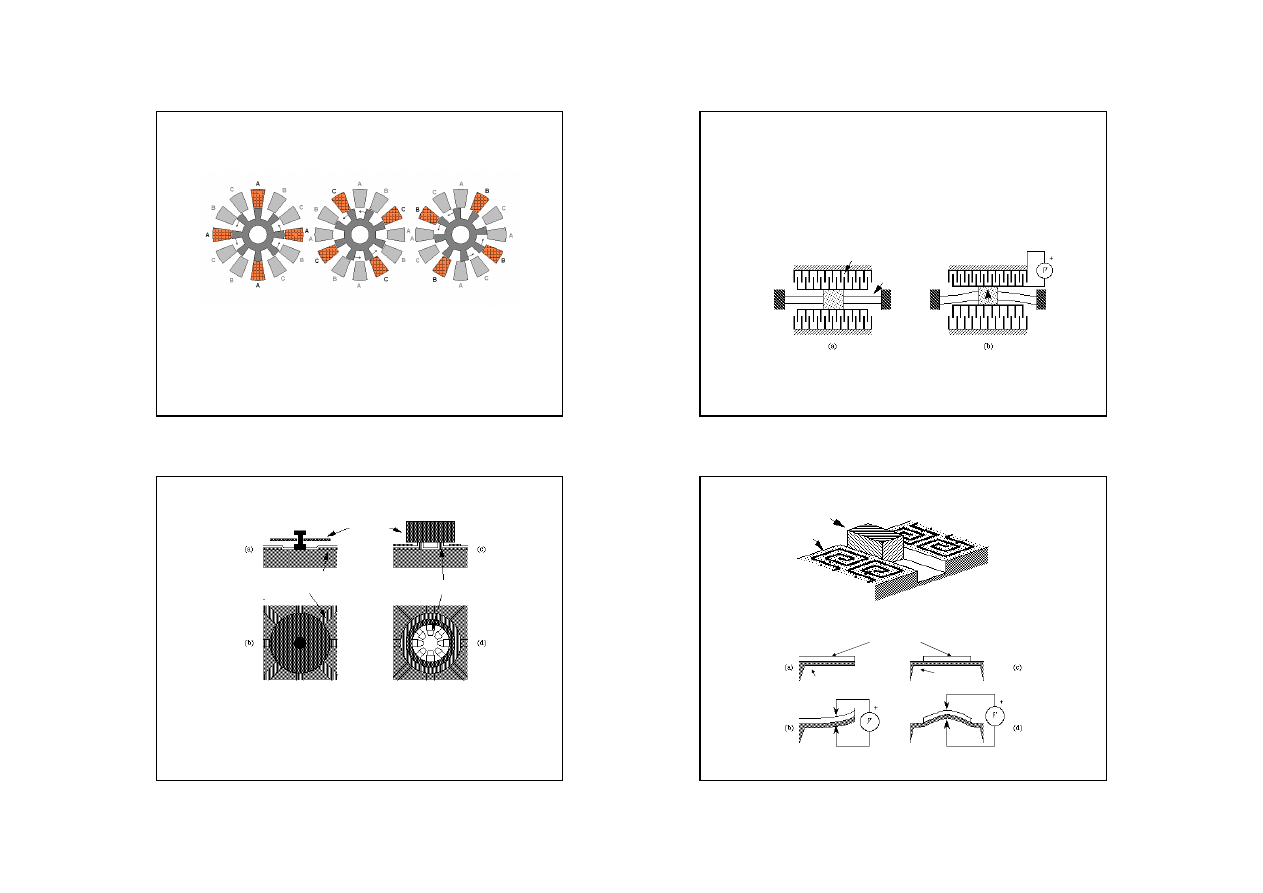
Schemat etapów wytwarzania mikrosilnika krzemowego
c) Nałożenie drugiej warstwy izolacyjnej:
d) Kompletne urządzenie:
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Mikrosilniki – zasada działania
• Zasada działania mikrosilnika elektrostatycznego przypomina
zasadę działania silnika reluktancyjnego.
• Stojan nie posiada uzwojeń, lecz stanowi układ elektrod.
• Uzębiony wirnik nie jest podłączony do zasilania.
• W odpowiedni sposób należy zasilić kolejne elektrody stojana
aby mikrosilnik mógł wykonać serię skoków między swoimi
kolejnymi położeniami stabilnymi
Praca silnika jest możliwa tylko przy zastosowaniu odpowiedniego
elektronicznego układu zasilającego
2013-05-28
24
Dorota Stachowiak 2008
Nowe technologie w mechatronice
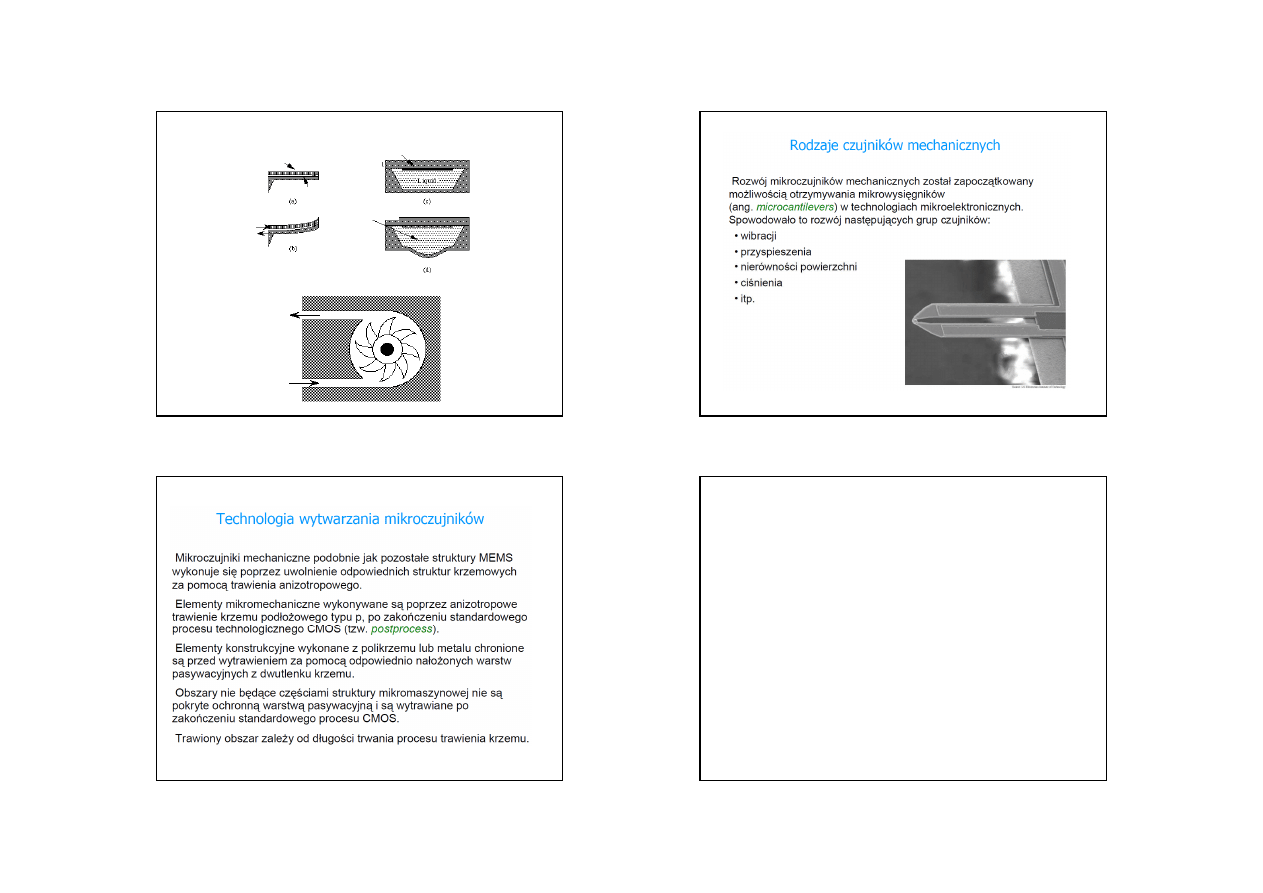
Zasada ruchu mikrosilnika elektrostatycznego
• Silnik o dwunastu elektrodach stojana i ośmiu zębach wirnika.
• Elektrody stojana podzielone są na trzy sekcje po cztery elektrody na
każdą z sekcji.
• Każda z sekcji dołączona jest do jednej fazy układu zasilania
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Mikroaktuatory MEMS
Aktuatory elektrostatyczne
Palce napędu grzebieniowego
Giętka
podpora
Comb Drives
Aktuator grzebieniowy (a) położenie początkowe
(b) położenie po przesunięciu wywołanym siłą F
x
W momencie przyłożenia napięcia między palcami powstaje siła
przyciągająca, która powoduje poruszanie się palców względem
siebie. Palce tworzą elektrody kondensatora, w którym wzrost
pojemności jest proporcjonalny do liczby palców.
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Widok z boku
wirnik
Izolowane elektrody
stojana
Widok z góry
Elektrody stojana
Mikrosilnik wirujący: a) widok z boku b) widok z
góry c) wirnik toczący się, widok z boku d) wirnik
toczący się, widok z góry
Wobble motors
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Aktuator magnetyczny
magnes
cewki
Aktuator piezoelektryczny
materiał piezoelektryczny
belka
mostek
2013-05-28
25
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Aktuator termiczny
metal
izolator
element grzejny
ogrzana ciecz
ogrzewający
prąd
Aktuator hydrauliczny
wyjście
wejście
Woda
www.dbanks.demon.co.uk
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Mikrosensory MEMS
Akcelerometr mikromechaniczny
Przykłady zastosowania akcelerometrów
- Pomiar przyspieszeń
- Pomiar parametrów ruchu postępowego i obrotowego
- Systemy alarmowe
- Pomiar trajektorii ruchu poruszających się obiektów
- W przemyśle samochodowym (poduszki powietrzne, systemy
antypoślizgowe ABS, systemy stabilizacji jazdy)
- Systemy nawigacji satelitarnej GPS
- Pomiary drgań maszyn przemysłowych
- Komputerowe urządzenia peryferyjne: mysz, joystick
2013-05-28
26
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Wybrane mikrosystemy
MEMS
• czujniki przyspieszenia
• czujniki ciśnienia
• tonometry
• czujniki promieniowania elektromagnetycznego i bolometry
• protezy zmysłów (ucho,oko)
• różne czujniki biomedyczne
• urządzenia dla chirurgii nieinwazyjnej
(kolonoskopy, endoskopy, narzędzia,
bioroboty)
• regeneratory nerwów, sondy neurologiczne
• mikrodializatory
• mikroskopy tunelujące i sił atomowych
• mikrosilniki elektryczne i elektromagnetyczne
• twarde dyski - nowe typy pamięci
• drukarki ink-jet, aktywne rozpylacze paliwa
• przepływomierze
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Wybrane mikrosystemy
MEOMS
•
lustra i zwierciadła, modulatory wiązek, przełączniki
• projektory
• struktury optyczne
• siatki dyfrakcyjne i maski fotolitograficzne
• Interferometry, mono-chromatory
• spektrofotometry
• czujniki ciśnienia, różne czujniki mikro-mechaniczne
• dynamiczne soczewki,
• detektory optyczne
µ
TAS, bio-chip, lab-on-chip
•
mikroreaktory, mieszalniki, filtry,
• dozowniki płynów, lekarstw
• chromatografy gazowe i cieczo-we
• czujniki bio, pH, analizatory bio, DNA
• analizatory
• mikropompy, zawory
• manipulatory komórkowe
• dozownik insuliny
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Zastosowania systemów Bio-MEMS
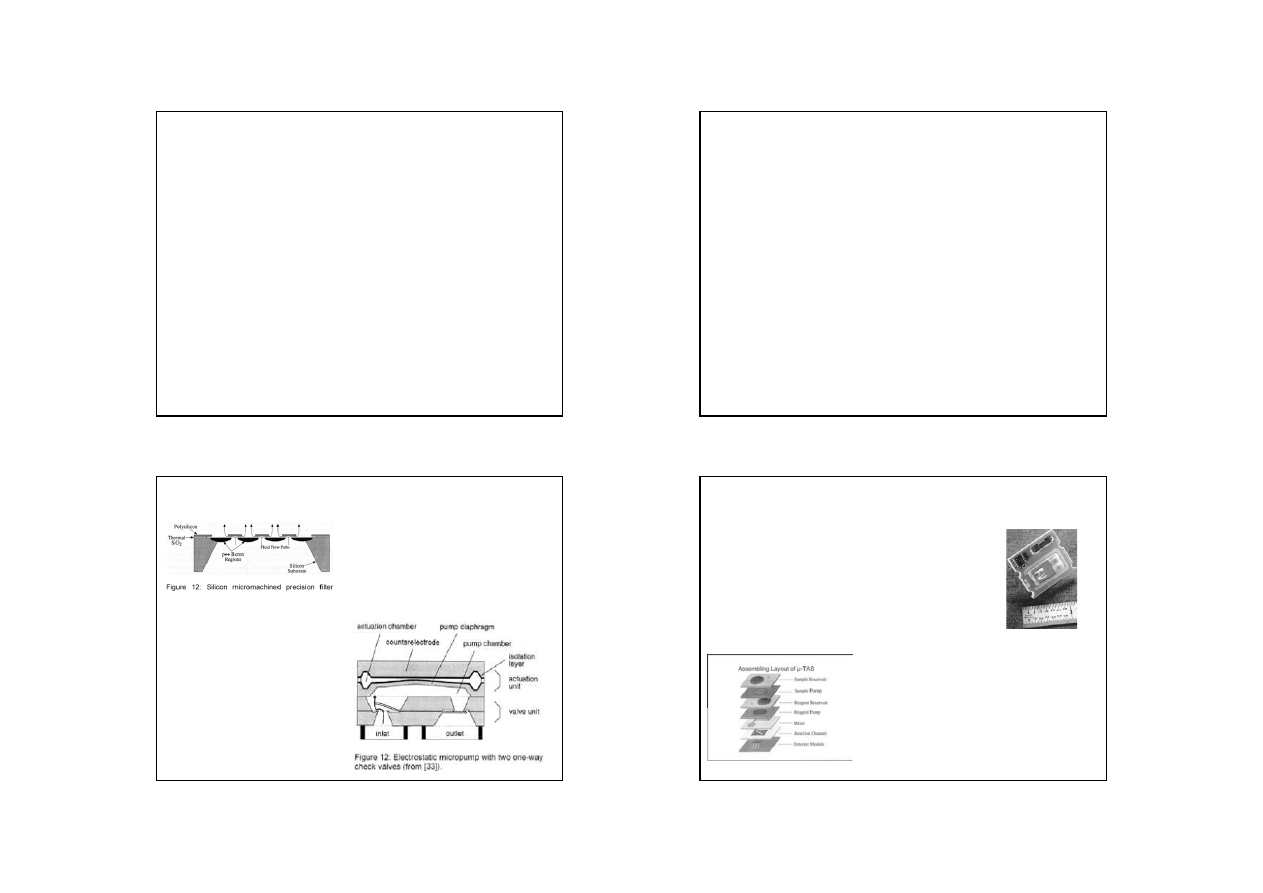
Mikrofiltr umożliwiający przepuszczanie
obiektów o określonych wymiarach.
Precyzyjne wykonanie w technologii MEMS
gwarantuje zmniejszenie wariancji
wielkości przepuszczanych obiektów.
Mikropompa sterowana
elektrostatycznie, wykonana
metodą łączenia warstw krzemu
poddanych procesowi
głębokiego trawienia. Jedna z
elektrod jest umieszczona na
membranie, która zasysa lub
wtłacza ciecz w zależności od
polaryzacji napięć dołączonych
do elektrod.
Dorota Stachowiak 2008
Nowe technologie w mechatronice
Zastosowania systemów Bio-MEMS
Mikrozawory umożliwiają sterowanie
przepływem substancji ciekłych lub
gazowych. Podgrzanie za pomocą
zintegrowanego rezystora niewielkiej porcji
cieczy obojętnej powoduje wystąpienie siły,
która przełącza zawór.
Zintegrowanie w jednym układzie
scalonym wielu mikropomp, mikrofiltrów,
dozowników i mikrozaworów stwarza
możliwość realizacji mikrolaboratorium
(µTAS) do przeprowadzania różnego typu
analiz chemicznych np. analizy DNA.
Wyszukiwarka
Podobne podstrony:
Mechanika i mechatronika zaliczenie SV 2013
Chemia org - Mech. reakcji i izom. opt, Studia WNOŻ SGGW 2008-2013, Inżynierskie, Semestr 2, Chemia
Pytania MECH IZR ESO 2013, AM Gdynia, Sem. I,II, Elektrotechnika - Jankowski, Zaliczenie
mikroekonomia 2013 Wydz Mech, Pwr, Mikroekonomia
GI ZIP i Mech Poznań 2012 2013 lato
wykłady NA TRD (7) 2013 F cz`
Pr UE Zródła prawa (IV 2013)
W WO 2013 technologia
TEORIE 6 2013 R
Wyk ECiUL#1 2013
Leczenie wrzodziejacego zapalenia jelit, wyklad 2013
TEORIE 1 2013 IIR
Wyk ECiUL#9S 2013
Estrogeny 2013
więcej podobnych podstron