
2008-11-19
1
Mechanika i Wytrzymałość
Materiałów
Imię, nazwisko i tytuł prowadzącego:
Mieczysław Łuźniak, dr inż.
pok. 236B, bud. D – 2,
tel. (071) 320 39 41,
e-mail: mieczyslaw.luzniak@pwr,wroc.pl
Materiały do pobrania na stronie:
http://www.iios.pwr.wroc.pl/tablica_ogl/luzniak_m/ogloszenia/pobierz.php
2008-11-19
2
Zaliczenie kursu
KOLOKWIUM
Data: ??

2008-11-19
3
Literatura
•Mechanika ogólna
– Jerzy Leyko
•Statyka i wytrzymałość materiałów
– Jerzy Rżysko
oraz każda inna książka do statyki
i wytrzymałości materiałów dowolnego
autora

2008-11-19
4
Mechanika jako nauka ścisła powstała w Grecji i Egipcie w IV wieku p.n.e. Jej twórcami byli Arystoteles (384 - 322 p.n.e.) i
Archytas z Tarentu (IV wiek p.n.e.). Prace ich dotyczyły maszyn prostych, stosowanych w technice uzbrojenia i budownictwie.
Punktem zwrotnym w rozwoju mechaniki były prace Archimedesa (287 - 212 p.n.e.). Ustanowił on prawa składania i rozkładania
sił równoległych, teorię dźwigni oraz określił środki ciężkości różnych figur geometrycznych i brył. Od Ptolemeusza - Klaudiusza (II
wiek n.e.) aż do czasów Leonarda da Vinci (1452 - 1519) wystąpił pewien zastój w rozwoju mechaniki. Leonardo da Vinci
zajmował się zagadnieniami dotyczącymi równi pochyłej, tarcia i bloków. Jemu należy przypisywać sformułowanie prawa
równoległoboku i wprowadzenie pojęcia momentu siły.
Nowe problemy układów odniesienia w mechanice postawił polski astronom Mikołaj Kopernik (1473 - 1543), autor słynnego
dzieła "De Revolutionibus Orbitum Coelestium" i twórca zasady równoważności ruchów względnych w układzie heliocentrycznym.
Dalszy postęp w rozwoju mechaniki jest związany z Galileuszem (1564 - 1642), który wprowadził pojęcie przyspieszenia,
opracował prawo bezwładności, prawa ruchu w polu ciężkości, zasady zachowania prac w maszynach prostych, rozwiązał
problem wahadła etc.
Trwałe miejsce w historii mechaniki mają również: Johan Kepler (1571 - 1630), który sformułował trzy prawa ruchu
planetarnego i Kartezjusz (1596 - 1650), który wprowadził prostokątny układ osi współrzędnych, zasadę prac wirtualnych i
rozwiązania rachunkowe zagadnień statycznych. Natomiast zasługą Christiana Huygensa (1629 - 1695) jest określenie pojęcia
reakcji, opracowanie teorii wahadła fizycznego i rewersyjnego, przyspieszenia w ruchu krzywoliniowym oraz uderzenia
sprężystego.
Wielką postacią mechaniki jest Isaac Newton (1642 - 1727), który zebrał i uporządkował naukę mechaniki w epokowym dziele
pt. "Philosophiae naturalis principia mathematica", dając podstawy mechaniki klasycznej, opartej ściśle na faktach
doświadczalnych. Odkrył prawa powszechnego ciążenia i klasycznej dynamiki. Jego rozwiązania dotyczą mechaniki punktu i
układu swobodnego.
Uczonym, który w zasadzie zakończył opracowanie praw statyki, był Pierre Varignon (1654 - 1722). Pojęcie energii kinetycznej
i metody jej zastosowania wprowadził Jan Bernoulli (1667 - 1748). Inni wybitni uczeni to: Michał Łomonosow (1711 - 1765) -
twórca zasady zachowania masy, Leonard Euler (1707 - 1783) - wprowadził analityczne metody rozwiązywania zagadnień ruchu,
mechaniki ciała sztywnego, obrotu ciała sztywnego wokół punktu nieruchomego etc., Jean D'Alembert (1717 - 1783) - odniósł
prawa statyki do dynamiki, Ludwig Lagrange (1737 - 1813) - twórca mechaniki analitycznej, Pierre Laplace (1743 - 1827) -
zajmował się mechaniką ciał niebieskich, Michał Ostrogradski (1801 - 1861) i William Hamilton (1805 - 1865) - twórcy zasad
wariacyjnych.
Uzupełnieniem mechaniki jest mechanika kwantowa, którą zapoczątkowali: Max Planck (1858 - 1947), Erwin Schrödinger
(1887 - 1961) i Paul Dirac (ur. 1902). Twórcą mechaniki relatywistycznej, opartej na teorii względności, jest Albert Einstein
(1879 - 1955).
Spośród polskich uczonych szczególnie zasłużonych w rozwoju mechaniki należy wymienić: Maksymiliana Tytusa Hubera i
Stefana Banacha.

2008-11-19
5
Zakres wykładu
• zasady statyki, siła, moment, więzy.
• układy sił, redukcja, warunki równowagi.
• siły zewnętrzne i wewnętrzne: kratownice, belki,
ramy, obliczanie cięgien.
• geometria mas, momenty bezwładności
powierzchni płaskich.
• tarcie.
• określanie własności mechanicznych materiałów.
• analiza
jednoosiowego
i
płaskiego
stanu
naprężenia, rozciągania i ściskania.

2008-11-19
6
Zakres wykładu
• obliczenia wytrzymałościowe prętów prostych,
rozciąganych i ściskanych.
• zginanie proste, ukośne i z uwzględnieniem
naprężeń stycznych.
• wytrzymałość złożona, hipotezy
wytrzymałościowe.
• zbiorniki cienkościenne.
• wyboczenie, ścinanie, skręcanie.
• zmęczenie materiału.

2008-11-19
7
Zakres wykładu
• energia odkształcania sprężystego
• ruch punktu na płaszczyźnie, ruch obrotowy
i płaski, ruch złożony punktu. .
• doświadczalna analiza naprężeń.
• podstawy dynamiki.

2008-11-19
8
Efekty kształcenia
• rozumienia ogólnych praw ruchu i
równowagi ciał materialnych oraz zjawisk
fizycznych, którym podlegają odkształcane
ciała stałe poddane działaniu obciążeń
zewnętrznych;
• stosowania wiedzy z zakresu mechaniki i
wytrzymałości materiałów w projektowaniu
urządzeń dla potrzeb inżynierii środowiska.

2008-11-19
9
Podstawowe pojęcia i założenia
• Punkt materialny
• Ciało doskonale sztywne
• Siła skupiona
• Siła powierzchniowa
• Siła objętościowa

2008-11-19
10
Podstawowe pojęcia i założenia
Zasady Newtona
• Punkt materialny, na który nie działa żadna siła, pozostaje
w spoczynku lub porusza się ruchem jednostajnym po linii
prostej.
• Przyspieszenie punktu materialnego jest proporcjonalne do
siły działającej na ten punkt i ma kierunek siły.
• Siły wzajemnego oddziaływania dwóch punktów
materialnych są równe co do wartości i są przeciwnie
skierowane wzdłuż prostej łączącej oba punkty.

2008-11-19
11
Jednostki masy i siły
• Od 30.12.1966 w Polsce obowiązuje
międzynarodowy układ jednostek SI
Długość
– [m]
Czas
– [s]
Masa
– [kg]
Siła
– [N]
2
1
1
1
s
m
kg
N

2008-11-19
12
Aksjomaty statyki (1)
• Dwie siły mające jedną linię działania,
jednakowe moduły i przeciwne zwroty
stanowię układ równoważny zeru lub
inaczej układ zerowy

2008-11-19
13
Aksjomaty statyki (2)
• Ruch swobodnego ciała sztywnego nie
ulegnie zmianie, jeśli do działającego
układu sił dodamy lub od niego odejmiemy
układ sił równoważny zeru
2008-11-19
14
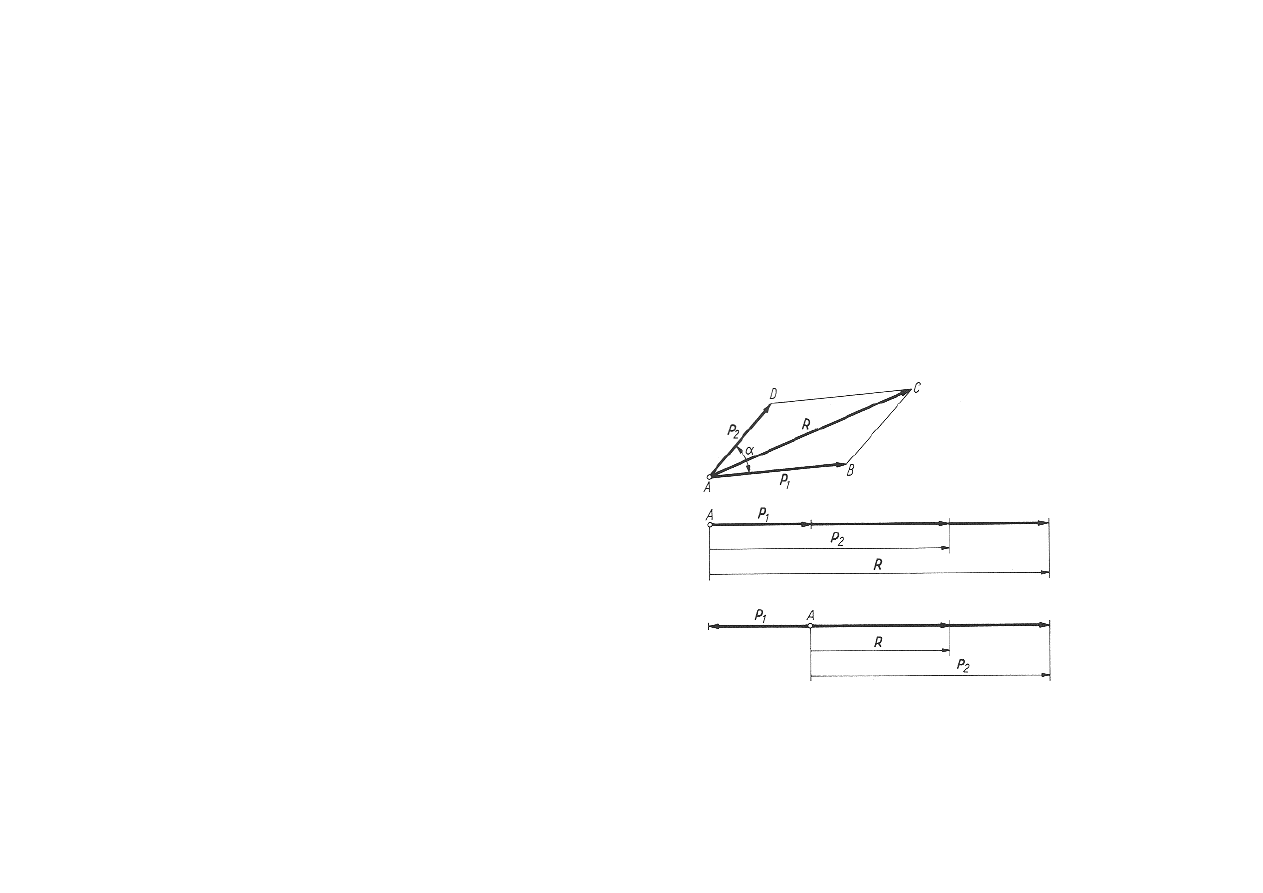
Aksjomaty statyki (3)
• Wypadkowa dwóch sił
działających w jednym
punkcie ciała sztywnego
przyłożona jest w tym
punkcie i jest siłą o
module równym
odpowiedniej przekątnej
równoległoboku i leży
na tej przekątnej

2008-11-19
15
Aksjomaty statyki (4)
• Siły, którymi działają na siebie wzajemnie
dwa ciała, mają równe moduły, są
skierowane wzdłuż jednej prostej i
zwrócone są w przeciwne strony

2008-11-19
16
Aksjomaty statyki (5)
• Jeśli ciało odkształcalne znajduje się w
równowadze pod działaniem pewnego
układu sił, to również zostanie w
równowadze ciało nieodkształcalne
identyczne z poprzednim, pod działaniem
tego samego układu sił
Aksjomat nie działa w drugą stronę

2008-11-19
17
Aksjomaty statyki (6)
• Każde ciało nieswobodne można
rozpatrywać jako ciało swobodne, jeśli
oswobodzimy je myślowo z więzów,
zastępując ich działanie siłami reakcji

2008-11-19
18
Stopnie swobody
• Stopniem swobody nazywa się możliwość
wykonania ruchu ciała niezależnego od innych
ruchów.
• Punkt materialny ma na płaszczyźnie dwa, a w
przestrzeni trzy stopnie swobody.
• Ciało doskonale sztywne ma na płaszczyźnie trzy,
a w przestrzeni sześć stopni swobody.

2008-11-19
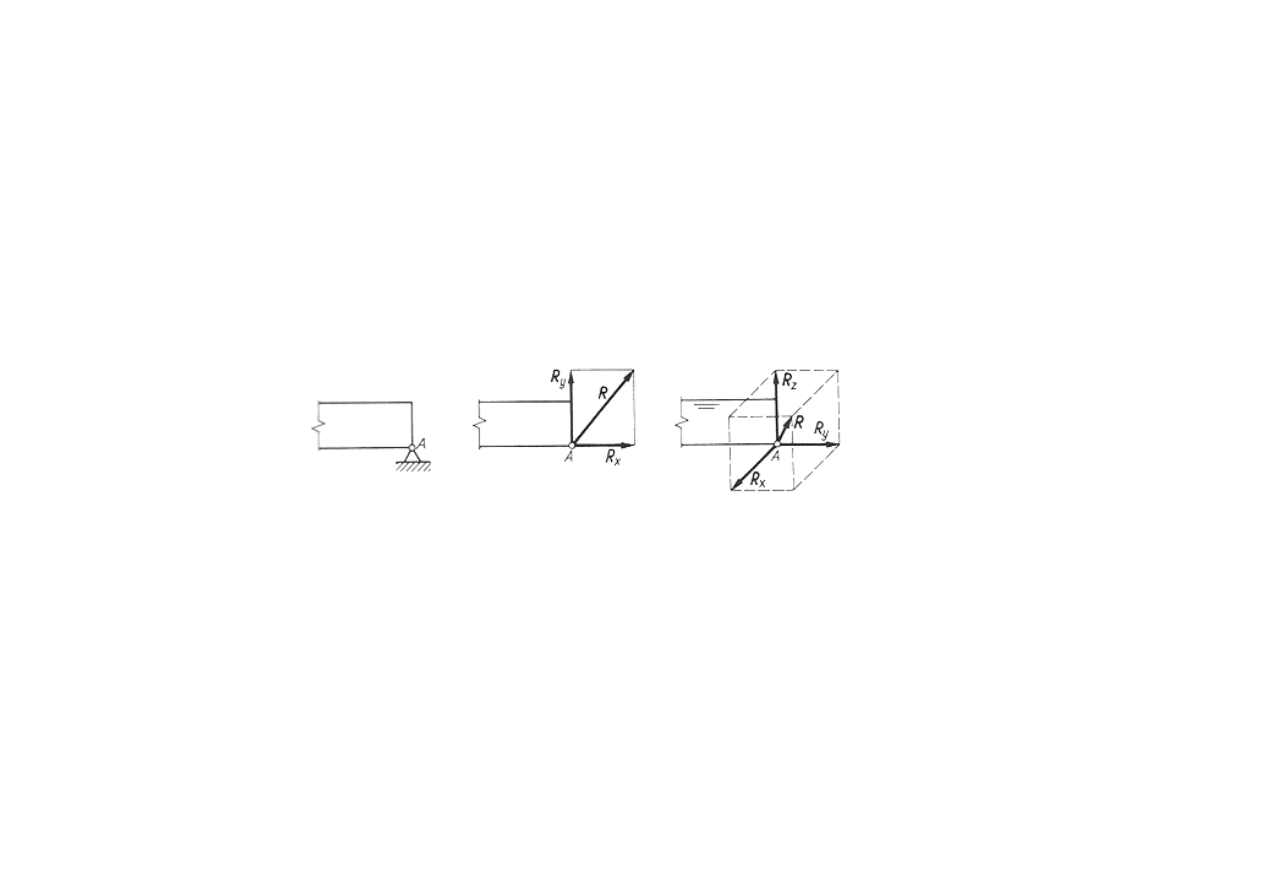
19
Więzy
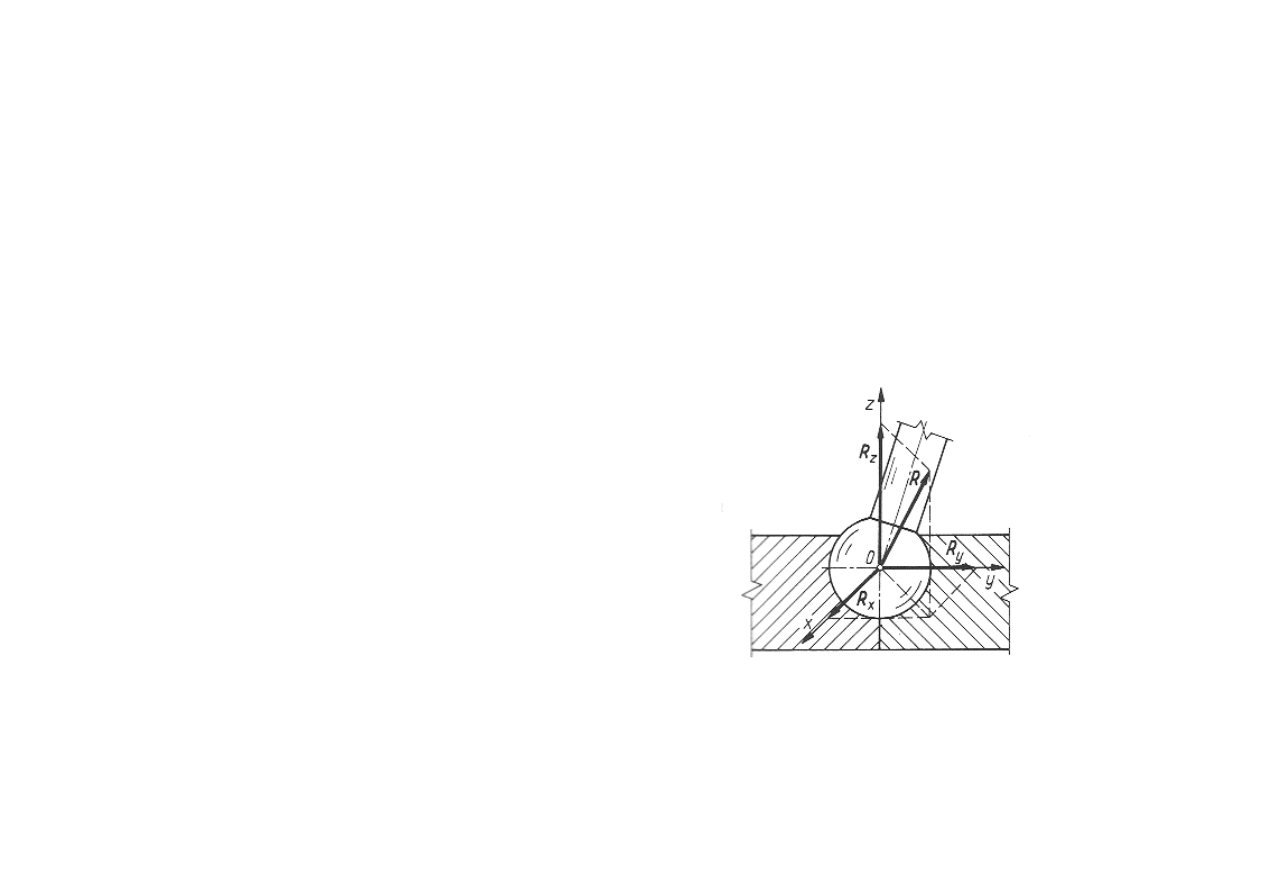
Przegub walcowy.
Ciało sztywne jest osadzone na
walcowym sworzniu przechodzącym przez
kołowy otwór wykonany w tym ciele. Po
pominięciu siły tarcia jako małej w
porównaniu z siłą normalną R do
powierzchni styku linia działania tej reakcji
będzie przechodziła przez oś sworznia.
Występujące dwie reakcje R
x
i R
y
stanowią
dwie niewiadome i umożliwiają
wyznaczenie wartości reakcji R i jej
kierunku.
2008-11-19
20
Więzy
Przegub kulisty
W celu unieruchomienia punktu podparcia
w przestrzeni stosuje się przeguby kuliste,
które krępują swobodę przesunięć, ale
umożliwiają obrót wokół dowolnej osi. Ich
zakończenie jest wykonane w kształcie
kuli, która jest osadzona w łożysku
kulistym. W wyniku pominięcia sił tarcia w
przegubie kulistym powstaje reakcja R o
dowolnym kierunku w przestrzeni,
przechodząca przez środek kuli i mająca
trzy niezależne składowe R
x
, R
y
i R
z
.
2008-11-19
21
Więzy
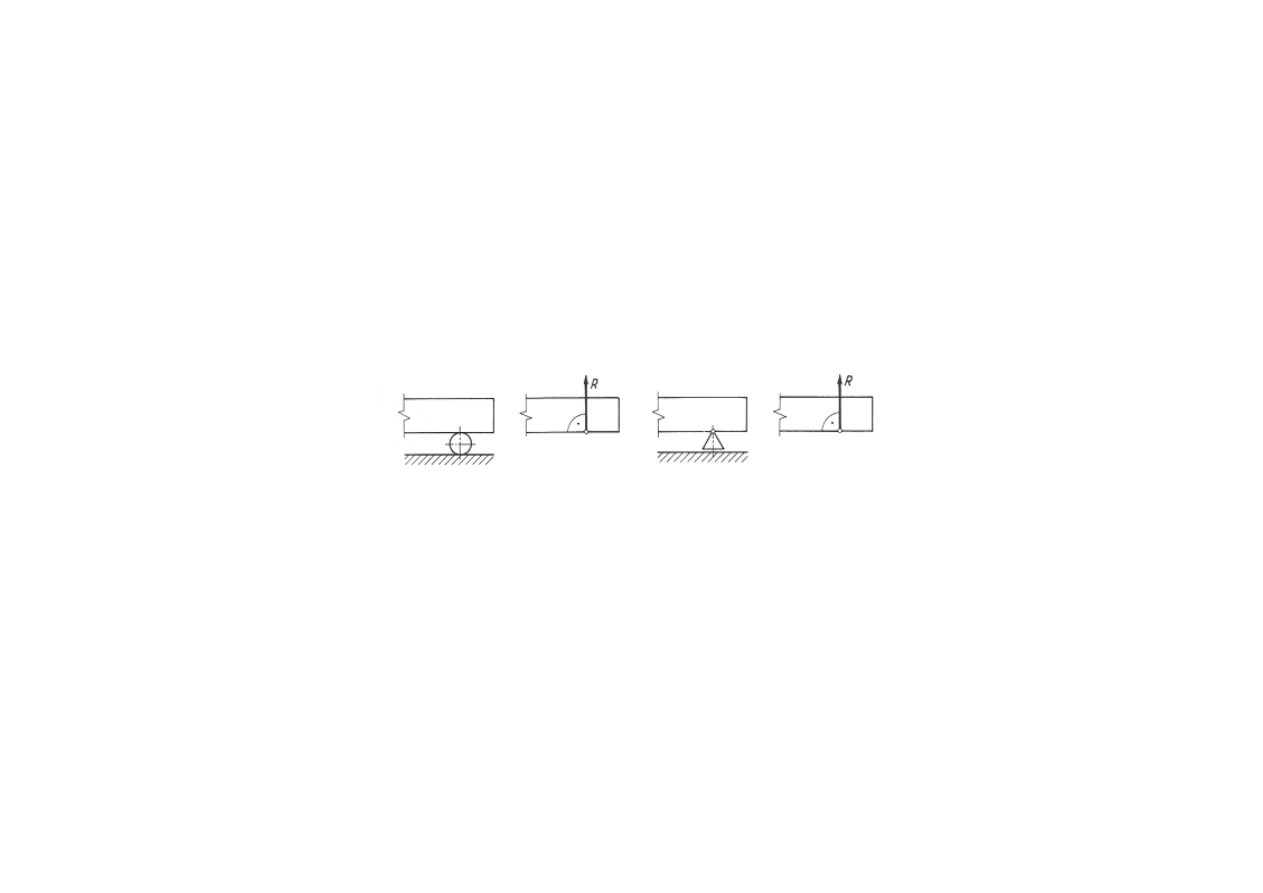
Podpora przegubowa przesuwna (rolkowa).
W przypadku zastosowania podpory przegubowej stałej koniec podparcia
ciała sztywnego może się obracać dookoła osi przegubu, ale nie może
się przemieszczać w dwóch kierunkach. Przy założeniu, że w przegubie
nie ma tarcia, linia działania reakcji R przechodzi przez punkt A. Powstają
dwie niezależne od siebie składowe reakcje R
x
iR
y
. Rozważając podporę
przegubową stałą w przestrzeni należy zauważyć, że koniec podparcia B
nie może się przemieszczać w trzech kierunkach i dlatego występują trzy
niezależne składowe reakcje R
x
, R
y
iR
z
.
2008-11-19
22
Więzy
Podpora przegubowa stała.
W przypadku zastosowania podpory przegubowej stałej koniec podparcia
ciała sztywnego może się obracać dookoła osi przegubu, ale nie może
się przemieszczać w dwóch kierunkach. Przy założeniu, że w przegubie
nie ma tarcia, linia działania reakcji R przechodzi przez punkt A. Powstają
dwie niezależne od siebie składowe reakcje R
x
i R
y
. Rozważając podporę
przegubową stałą w przestrzeni należy zauważyć, że koniec podparcia B
nie może się przemieszczać w trzech kierunkach i dlatego występują trzy
niezależne składowe reakcje R
x
, R
y
i R
z
.
2008-11-19
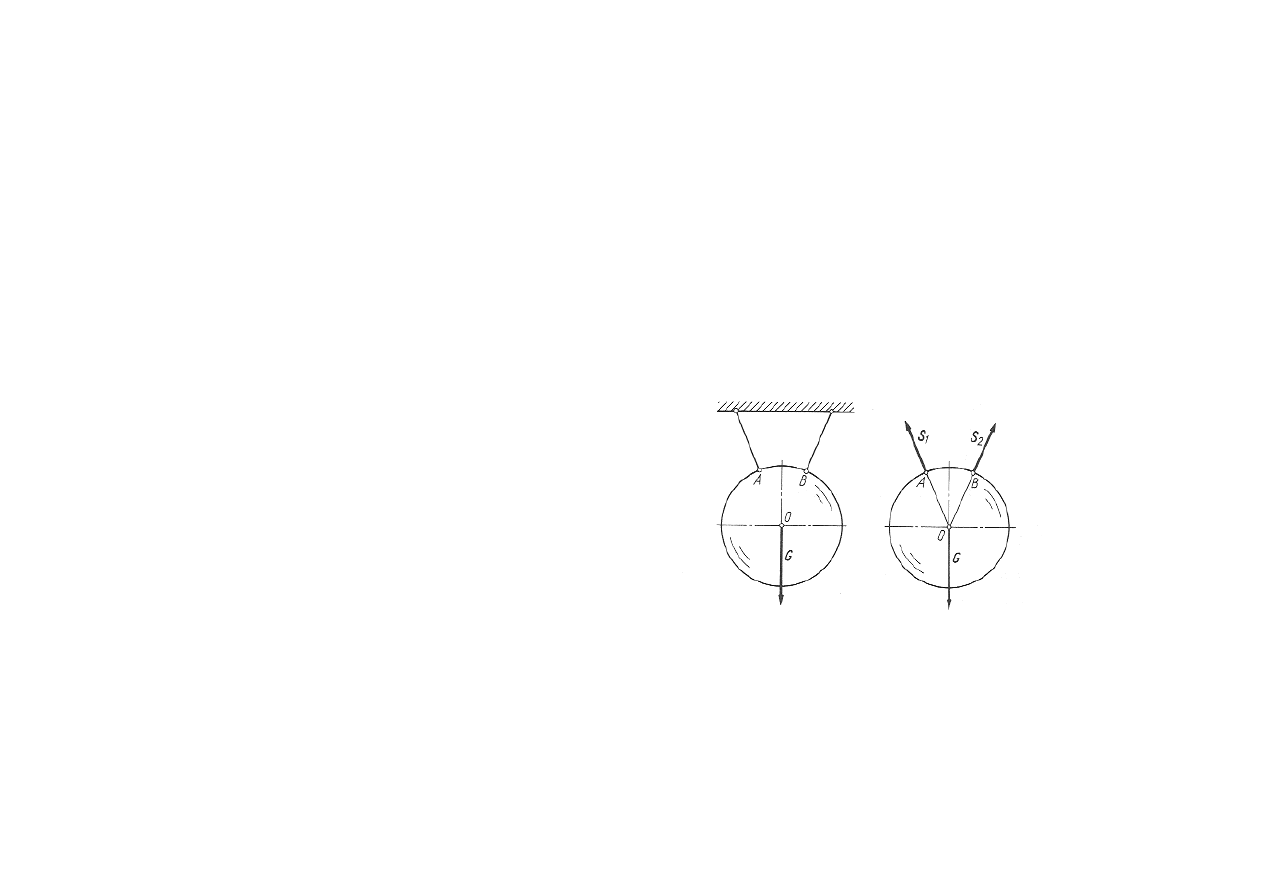
23
Więzy
Zawieszenie na cięgnach wiotkich.
Podwieszenie ciała za pomocą wiotkich
cięgien stwarza tzw. podpory kierunkowe
jednostronne, bo cięgna mogą być tylko
rozciągane. Reakcje S
1
i S
2
działają na ciało
wzdłuż tych cięgien, zgodnie z rysunkiem.
2008-11-19
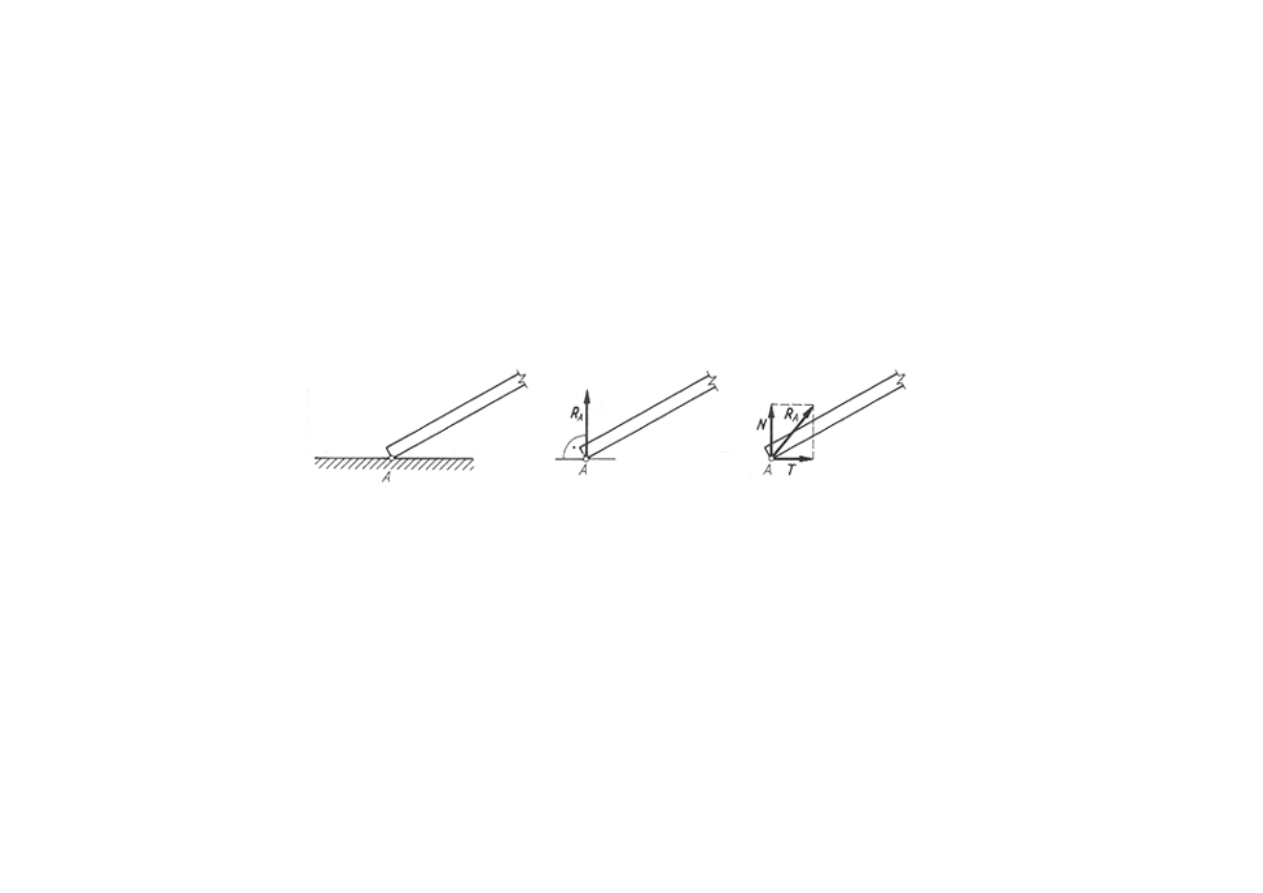
24
Więzy
Oparcie o gładką i chropowatą powierzchnię.
W przypadku oparcia ciała o gładką powierzchnię (styk punktowy) występuje
jedna reakcja R
A
, prostopadła do powierzchni styku. Jeżeli powierzchnia
będzie chropowata, to wystąpią dwie składowe reakcji R
A
: normalna do
powierzchni N i styczna siła tarcia T.
2008-11-19
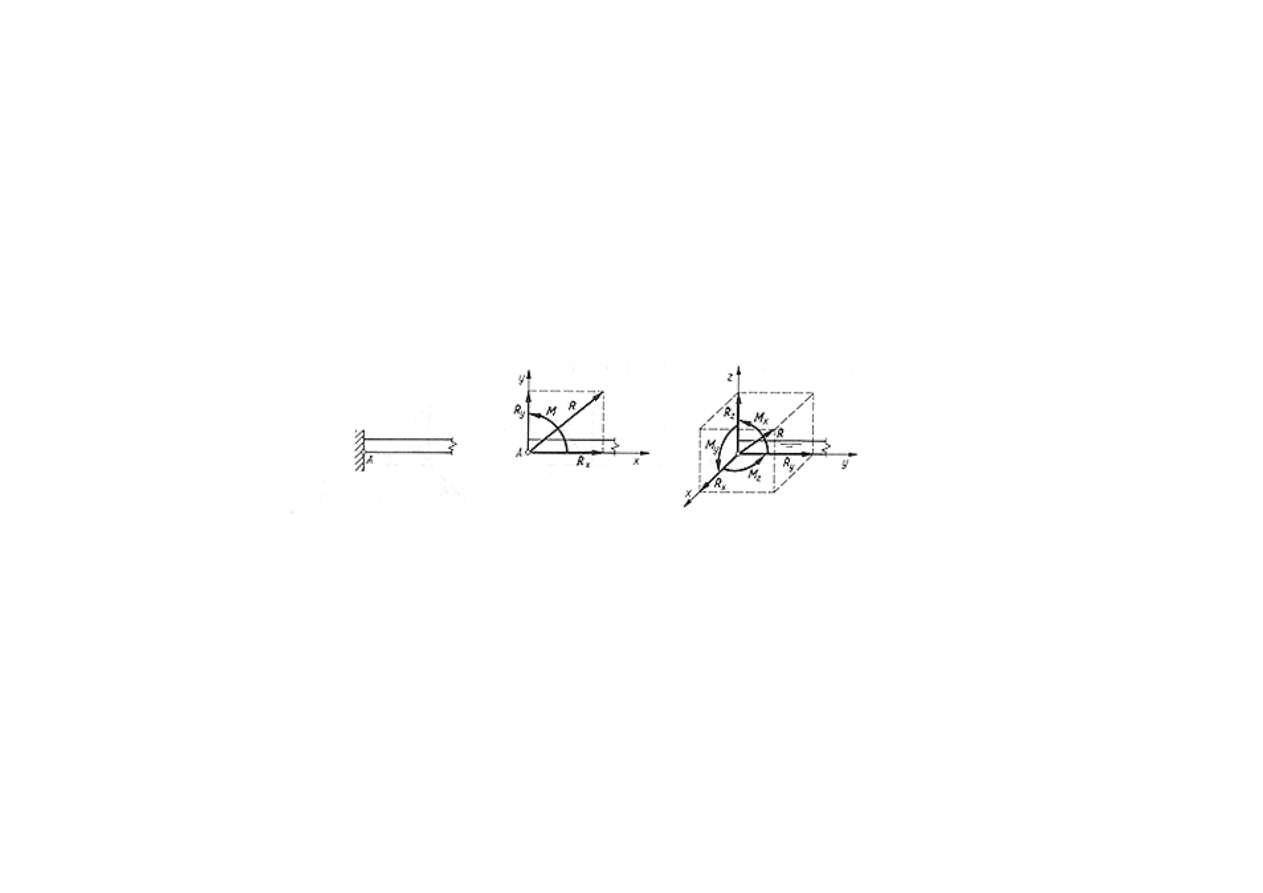
25
Więzy
Utwierdzenie całkowite.
Gdy chodzi o zupełne unieruchomienie ciała, wtedy stosuje się utwierdzenie
całkowite. Ciało sztywne na płaszczyźnie ma trzy stopnie swobody, a więc
wystąpi reakcja R o dwóch składowych R
x
i R
y
oraz moment utwierdzenia M.
Rozważając całkowite unieruchomienie ciała w przestrzeni, należy zastosować
takie utwierdzenie, które przedstawia sześć więzów. Wystąpi wtedy reakcja R o
trzech składowych R
x
, R
y
i R
z
oraz moment utwierdzenia M o trzech składowych
M
x
, M
y
i M
z
.
2008-11-19
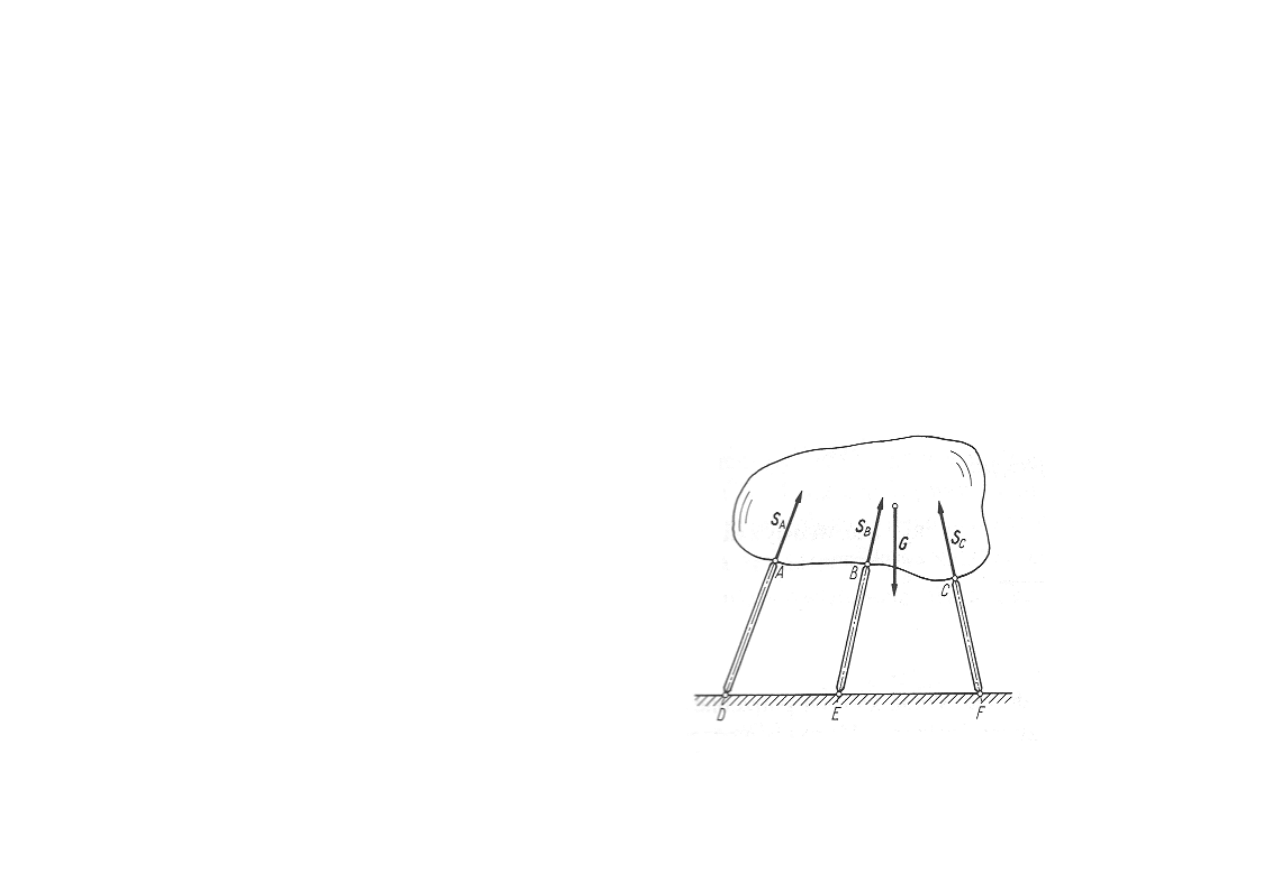
26
Więzy
Ciało podparte na prętach zamocowanych przegubowo na
obu końcach (prętach przegubowych).
Ciało sztywne można także unieruchomić
przez podparcie na prętach zakończonych
przegubami. Jeżeli pominiemy ciężary
własne prętów i tarcie w przegubach, to
reakcje na ciało będą działać wzdłuż tych
prętów S
A
, S
B
i S
C
, zgodnie z rysunkiem.
2008-11-19
27
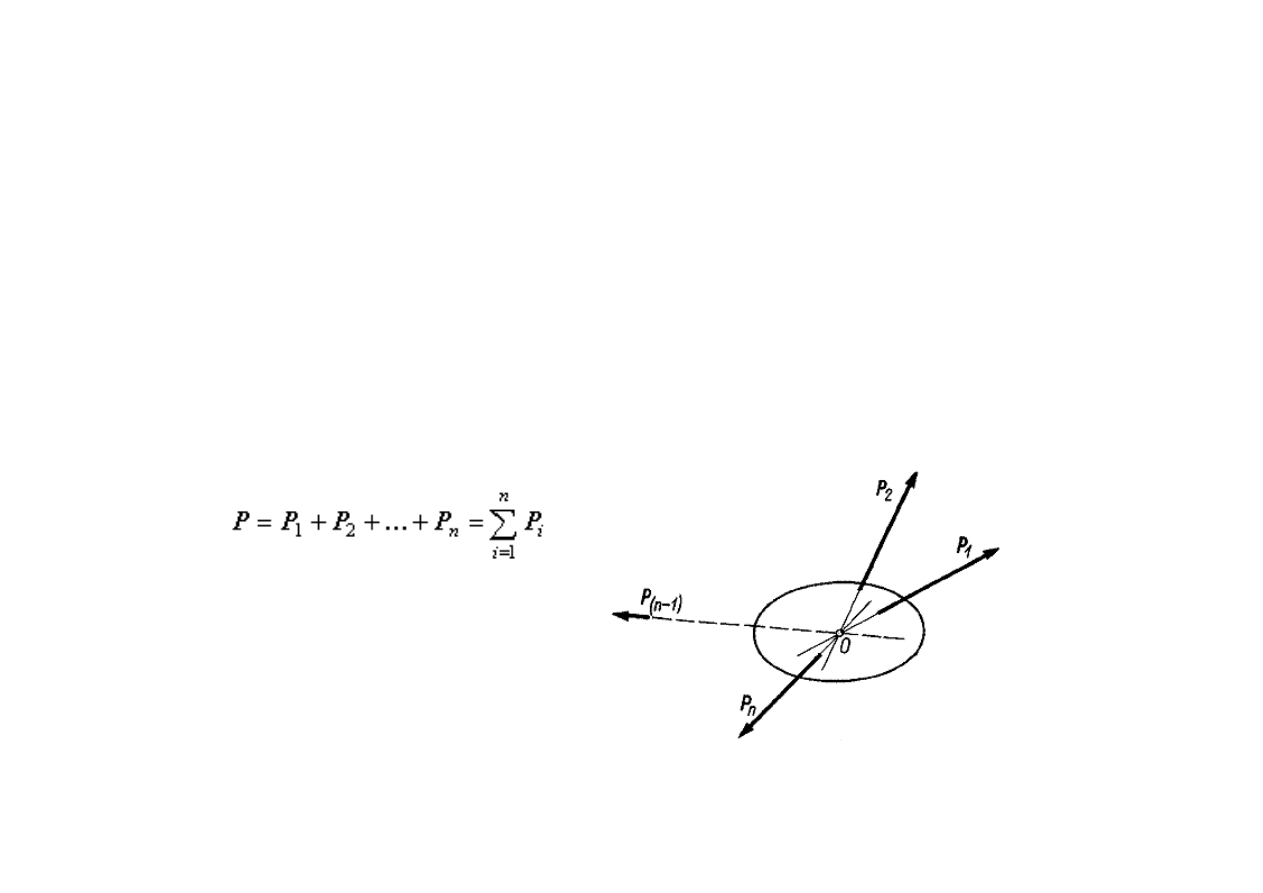
Płaski układ sił zbieżnych
Płaski układ sił zbieżnych P
1
, P
2
,..., P
n
przyłożonych do punktu O można zastąpić
siłą wypadkową P równą sumie
geometrycznej tych sił i przyłożoną również
w punkcie O.
2008-11-19
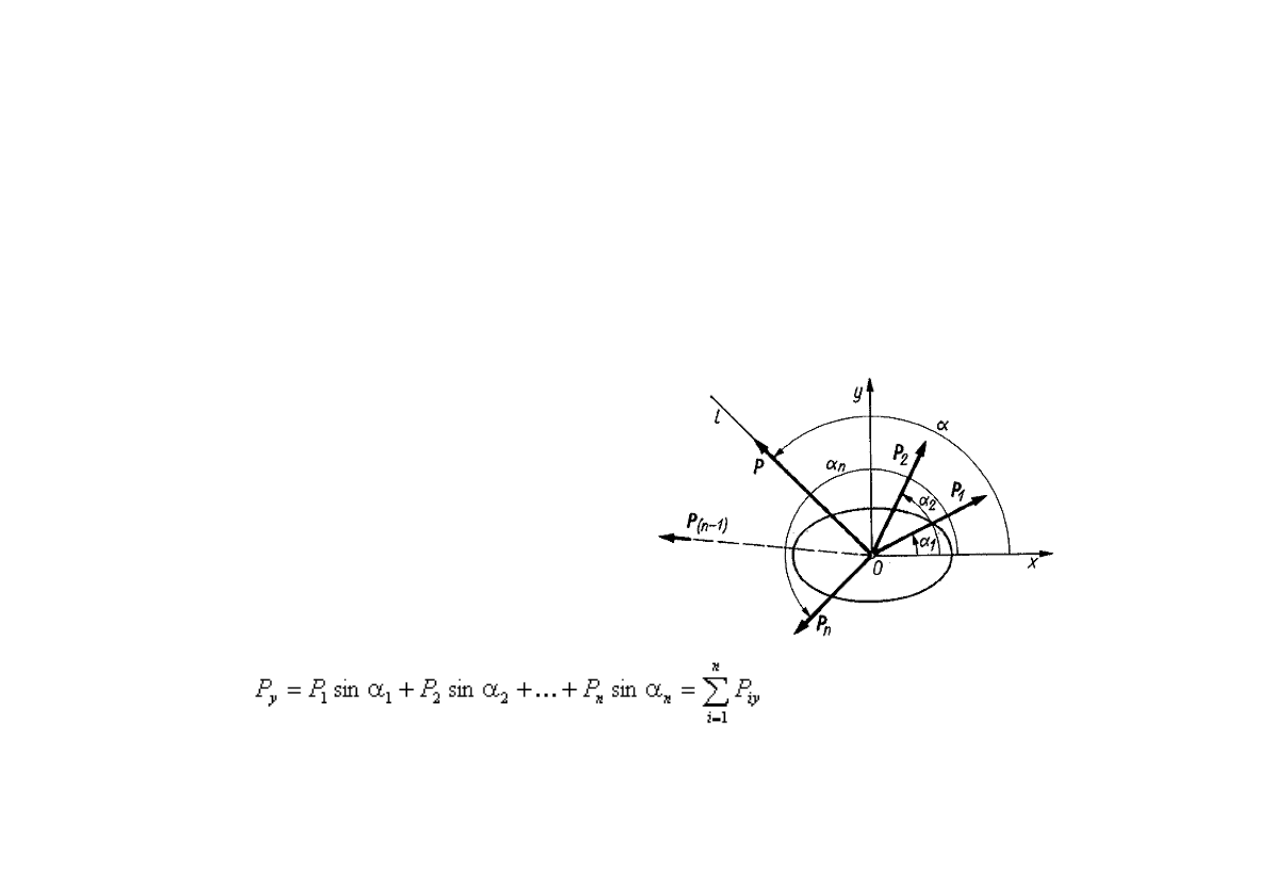
28
Płaski układ sił zbieżnych
W analitycznym sposobie wyznaczania
wypadkowej korzystamy z twierdzenia o
rzucie sumy wektorów, według którego
rzut sumy geometrycznej wektorów na
dowolną oś jest równy sumie rzutów tych
wektorów na tę samą oś. Przyjmując
układ współrzędnych 0xy, oznaczamy
odpowiednio przez
1
,
2
,...,
n
kąty
nachylenia poszczególnych sił do osi 0x.
Wypadkowa tych sił działa wzdłuż
prostej l przechodzącej przez punkt o i
nachylonej do osi 0x pod kątem
.
2008-11-19
29
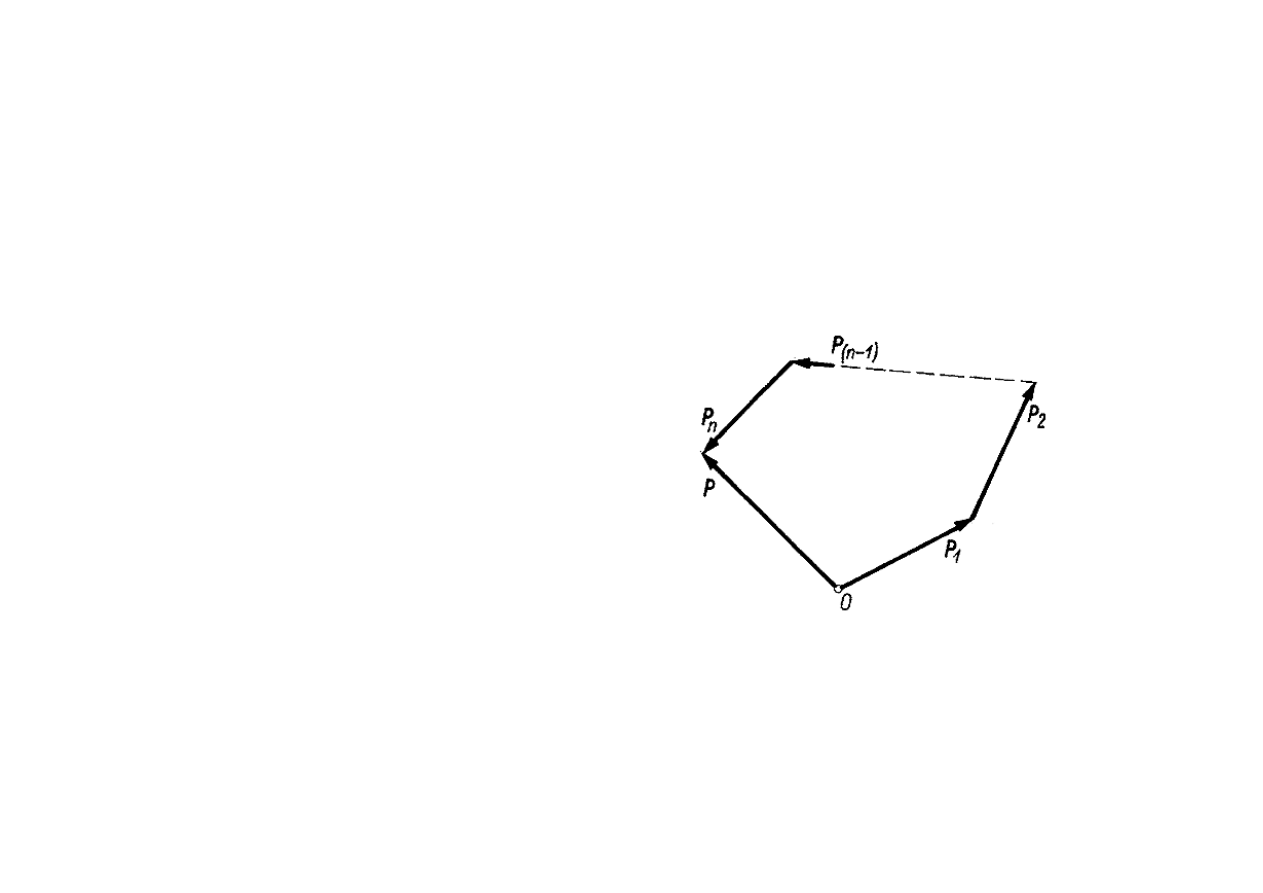
Płaski układ sił zbieżnych
W geometrycznym sposobie
wyznaczania wypadkowej należy
zbudować wielobok sił, w którym wektory
sił odkładamy równolegle do ich linii
działania. Z punktu O odkładamy wektor
P
1
, a z jego końca wektor P
2
i tak kolejne
wektory aż do P
n
.
2008-11-19
30
Płaski układ sił zbieżnych
Warunki równowagi
Płaski dowolny układ sił znajduje się w równowadze, jeżeli sumy rzutów
wszystkich sił na osie układu są równe zeru i moment wszystkich sił
względem dowolnego punktu 0 płaszczyzny działania sił jest równy zeru.
2008-11-19
31
Wektor główny
Dowolny układ sił, działających na
ciało sztywne, o liniach działania
leżących w jednej płaszczyźnie
możemy zastąpić wektorem głównym
R, przyłożonym do dowolnie
wybranego środka redukcji O oraz
momentem głównym M
o
względem
środka redukcji O. Wektor główny R
jest równy sumie geometrycznej
wszystkich sił układu
Wartość wektora głównego oraz
kąt , jaki wektor ten tworzy z osią Ox,
wyznaczamy ze wzorów
2008-11-19
32
Moment główny
Moment główny M
o
względem środka redukcji 0 jako początku układu
współrzędnych 0xy jest równy sumie momentów danych sił układu
względem punktu 0.
2008-11-19
33
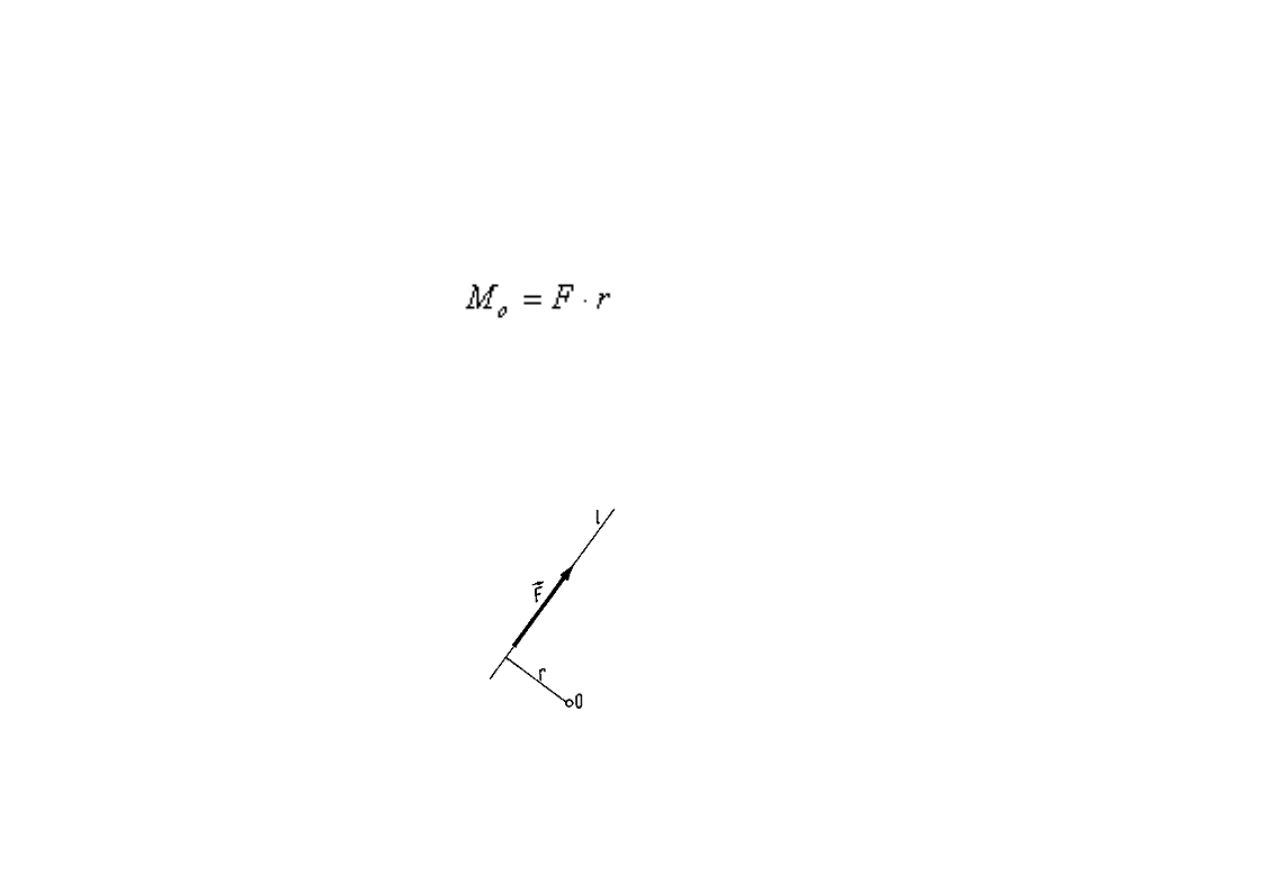
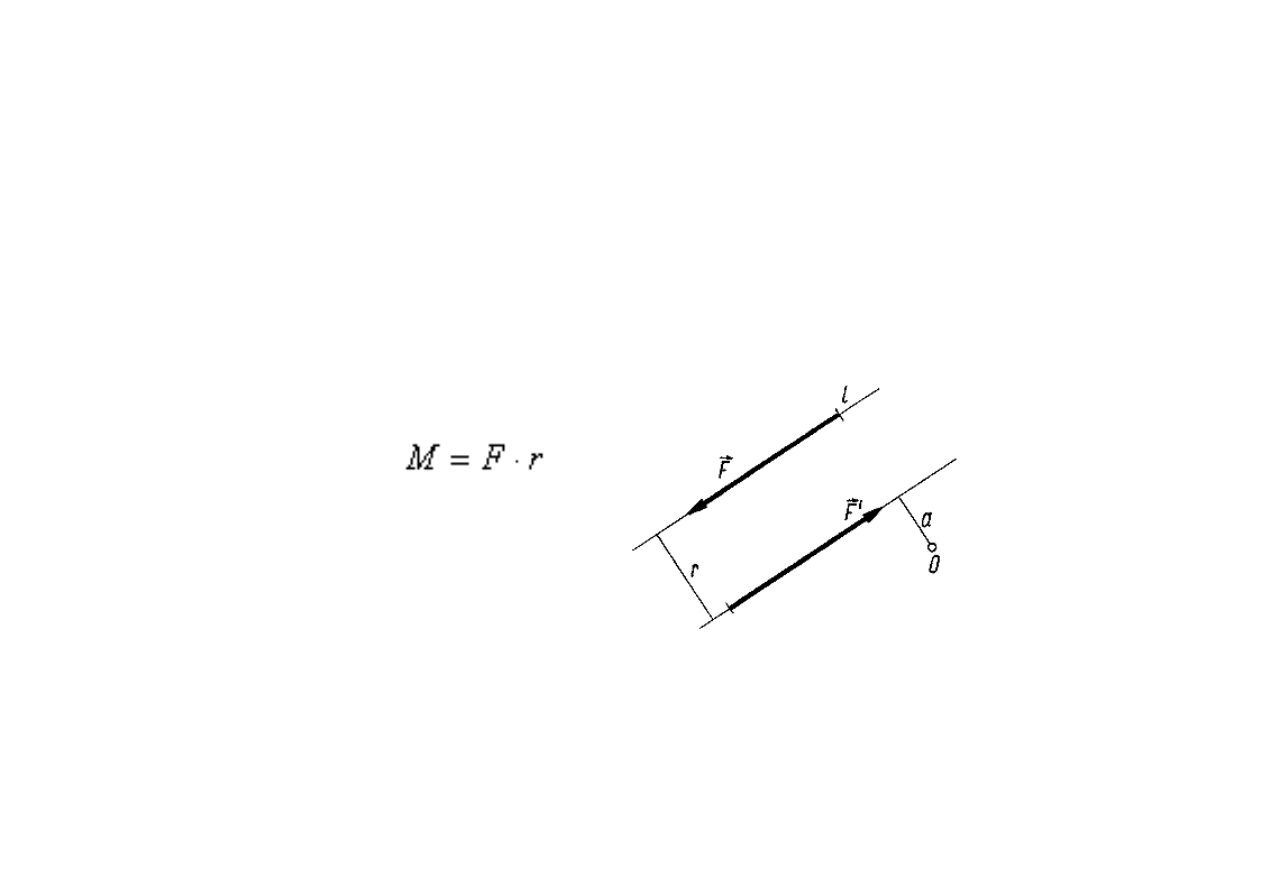
Co to jest moment?
Wyrażenie
gdzie: F jest siłą działającą wzdłuż prostej l, a r jej ramieniem
nazywamy momentem siły względem dowolnego punktu 0.
2008-11-19
34
Co to jest moment cd
Jest to wektor mający następujące cechy:
•wartość liczbową równą iloczynowi (F · r) wartości siły F i jej ramienia r
•kierunek prostopadły do płaszczyzny wyznaczonej przez linię działania
siły oraz biegun
•zwrot momentu przyjmujemy zgodnie z regułą śruby prawoskrętnej
2008-11-19
35
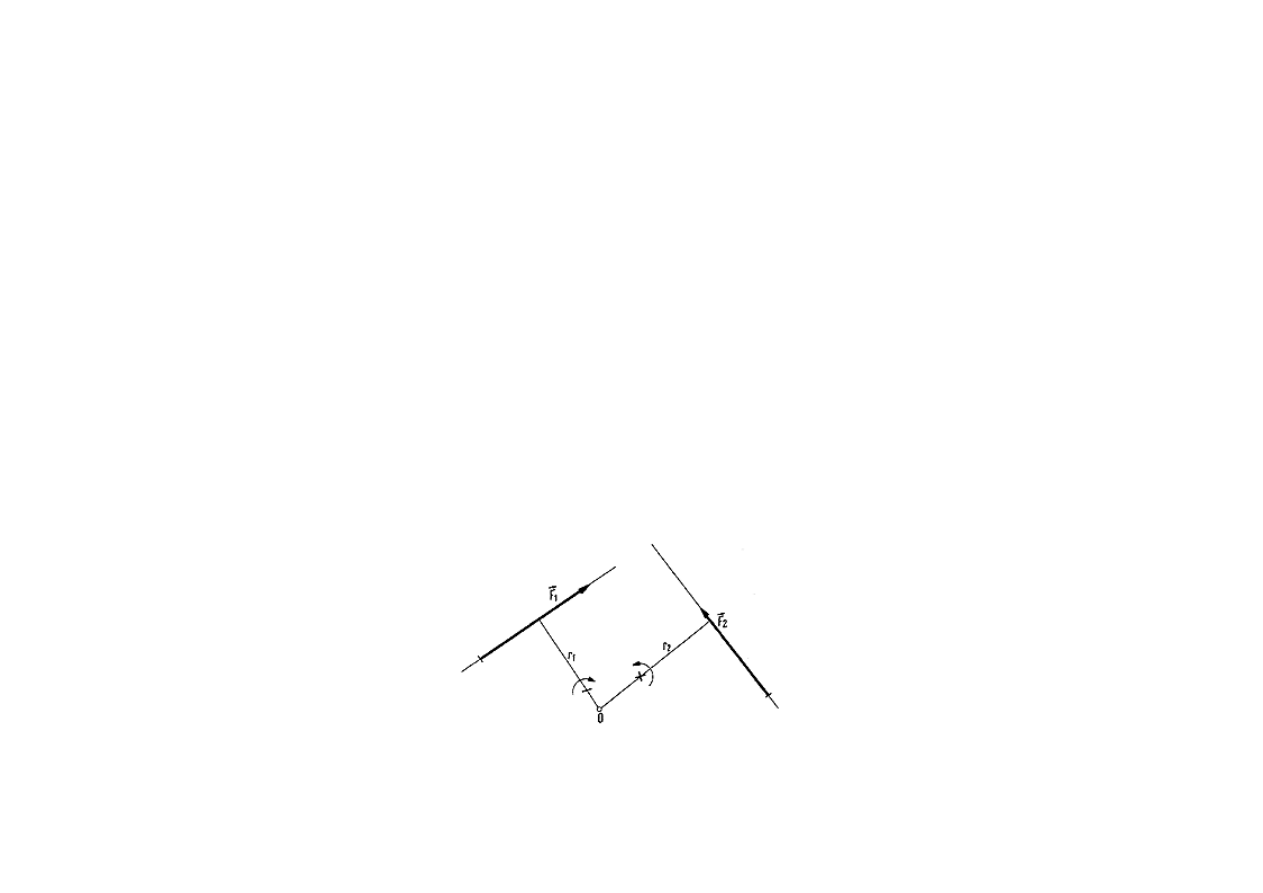
Co to jest moment cd
Parą sił nazywamy układ dwóch sił równej wartości i równoległych
(o jednakowych kierunkach), lecz o przeciwnych zwrotach.
Iloczyn wartości jednej z sił i ramienia pary nazywamy momentem pary sił.
2008-11-19
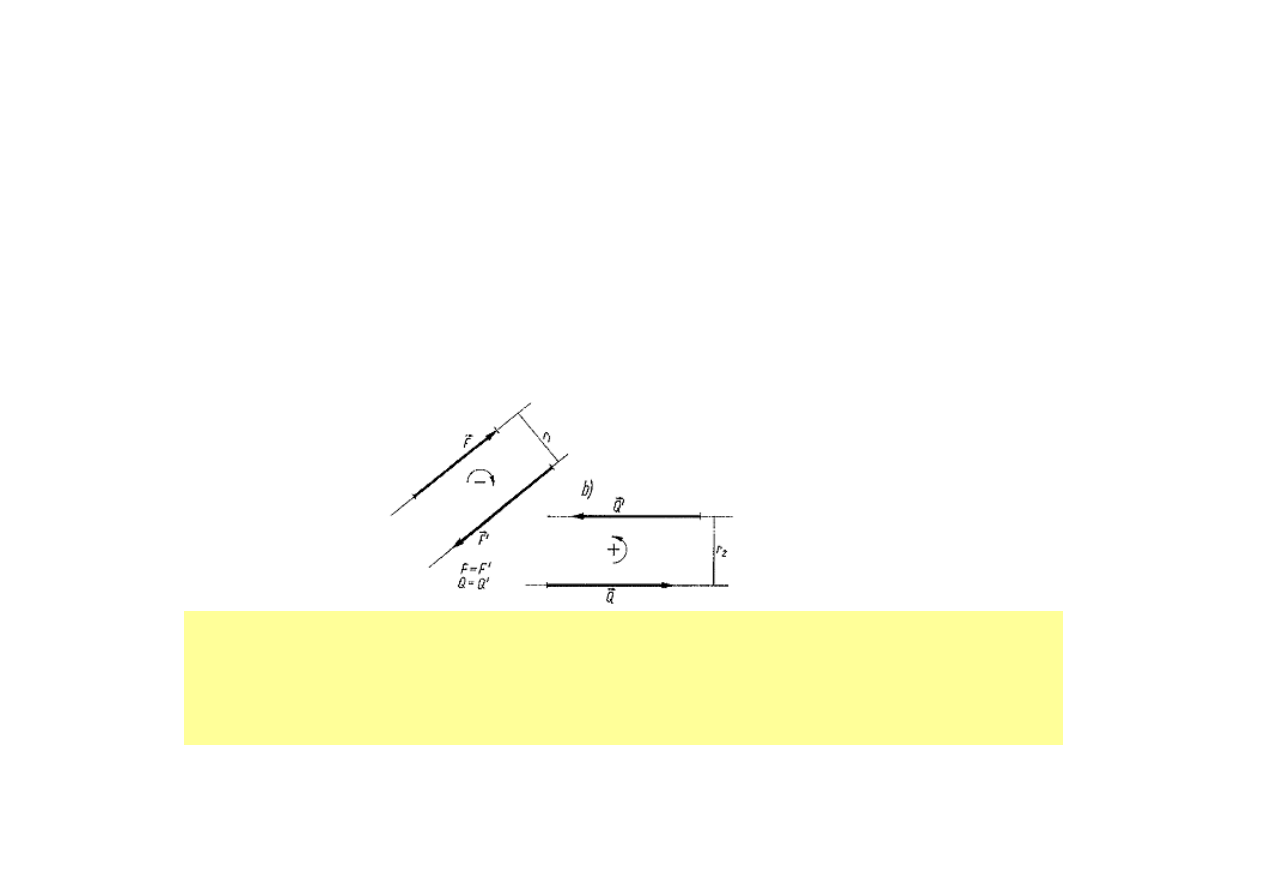
36
Co to jest moment cd
Każdą parę sił możemy zastąpić wektorem momentu sił i odwrotnie każdy
wektor momentu sił możemy zastąpić parą sił, jeśli tylko iloczyn wartości siły i
odległości między siłami wynosi M
Moment pary sił uważamy za dodatni, jeżeli para dąży do obrócenia
swego ramienia w stronę przeciwną do ruchu wskazówek zegara. Jeżeli
para dąży do obrócenia swego ramienia w stronę zgodną z ruchem
wskazówek zegara, to jej moment uważamy za ujemny.
Wyszukiwarka
Podobne podstrony:
Mechanika i Wytrzymałość Materiałów zestaw2
POMIAR TWARDOŚCI SPOSOBEM BRINELLA, POLITECHNIKA POZNAŃSKA, LOGISTYKA, semestr I, mechanika i wytrzy
Mechanika - 3cie kolokwium, POLITECHNIKA POZNAŃSKA, LOGISTYKA, semestr I, mechanika i wytrzymałość m
MECHANIKA KOLOS, Elektrotechnika PŁ, Mechanika i wytrzymałość materiałów
mechanika - teoria, POLITECHNIKA POZNAŃSKA, LOGISTYKA, semestr I, mechanika i wytrzymałość materiałó
Mechanika i Wytrzymałość Materiałów W 4
6.Tensometria(3), POLITECHNIKA POZNAŃSKA, LOGISTYKA, semestr I, mechanika i wytrzymałość materiałów,
Mechanika i Wytrzymałość Materiałów zestaw3
Mechanika i Wytrzymałość Materiałów W 5
mechanika o wytrzymalosc materialow
Zagadnienia- mechanika, Politechnika Wrocławska Energetyka, 3 semestr, Mechanika i wytrzymałość mate
Wykłady i ćwiczenia mechanika, POLITECHNIKA POZNAŃSKA, LOGISTYKA, semestr I, mechanika i wytrzymałoś
WYZNACZANIE MOMENTU BEZWŁADNOŚCI I SPRAWDZANIE TWIERDZENIA STEINERA 12, Nauka, MECHANIKA I WYTRZYMAŁ
badania twardosci metoda vickersa, POLITECHNIKA POZNAŃSKA, LOGISTYKA, semestr I, mechanika i wytrzym
zagadnienia egzamin mechanika, Wytrzymałość materiałów i mechanika budowli (WMiMB)
MECHANIKATECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁOW STATYKA
MiWM (1), Polibuda, semestr 3, Mechanika i wytrzymałość materiałów, Mech. i wytrzymał. materiałów -
więcej podobnych podstron