1/25/2012
1
dr inż. Piotr Wężyk
Wykład: 5b_G
Globalne Systemy
Pozycjonowania
GNSS
HISTORIA
Kurs: Podstawy geomatyki w leśnictwie
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
2
Nawigacja - historia (1)
Nawigacja - nauka techniczna obejmująca całokształt wiadomości
niezbędnych do prowadzenia statku wodnego (hydronawigacja) lub
powietrznego (nawigacja lotnicza - aeronawigacja) i wyznaczania jego
położenia.
Rozróżnia się: nawigację
podstawową (wg mapy, busoli
i chronometru), uproszczoną
(wzrokową), bezwładnościową,
astronawigację, meteonawigację
i radionawigację oraz nawigacje
GPS.
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
3
Nawigacja - historia (2)
Określanie własnego położenia tj. szerokości i długości geograficznej
Istota obliczania długości geograficznej polega na dokładnym
zaznaczeniu chwili, w której zachodzi jakieś zjawisko.
Ptolemeusz w
Geografii
(I w n.e) zaleca metodę obserwacji zaćmień
Księżyca na podstawie przykładów stosowania w 330 roku p.n.e. !!!
Nie wyjaśniono jednak jak określać czas lokalny podczas zaćmień gdy słońce
jest za horyzontem. W 1415 roku dzieło
Geografiia
trafia do Wenecji.
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
4
Zaćmienie księżyca można obserwować prawie jednocześnie na całej
półkuli Ziemi (cztery fazy U1-U4). W momencie fazy U4 obserwator
wyszukiwał gwiazdę przecinającą lokalny południk i potem porównywano
to z momentem kiedy tą samą gwiazdę przecinał południk nad Pekinem.
Ziemia obraca się 360 stopni / 24godz, stąd jeśli różnica czasu wynosiła 6
godzin to znaczy, że obserwator był 90 stopni długości od Pekinu.
Wszyscy obserwatorzy wyposażeni byli w zegary wodne synchronizowane
w Pekinie przed jego upuszczeniem
Nawigacja - historia (3)
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
5
Chińczycy już w 1300 roku n.e zbudowali słynne
obserwatorium, wieżę Zhou Gong, w którym znajdował się
zegar wodny mierzący upływ czasu oraz 12 metrowy pręt
(gnomon) służący do obserwacji gwiazd i cienia. Chińczycy
mierzyli długość cienia w południe (pomiar z dokładnością
0,025cm –
camera obscura).
W dniu zrównania dnia z nocą, na równiku słońce wschodzi
dokładnie na E i zachodzi na W, a długość cienia pomiędzy tymi
punktami określa dokładny czas w tym konkretnym miejscu.
Nawigacja - historia (4)
Elementy wyposażenia obserwatorium:
Huntian xiang – globus nieba (pierwszy instrument Ricciego);Yangyi – zegar słoneczny
Gaobiao - gnomon wysokości 12 m, jak w Jang Zheng; Liyun yi – teodolit
Zhengli – przyrząd weryfikacyjny do określania dokładnej pozycji Słońca i Księżyca przed
zbliżającym się zaćmieniem; Jingfu – przyrząd do wzmocnienia kontrastu cienia; Riyueshi yi –
przyrząd do prowadzenia obserwacji zaćmień Słońca i Księżyca; Xinggui – instrument do
namierzania gwiazd Dingshi – przyrząd do pomiaru czasu; Houji – przyrząd do obserwacji
gwiazdy biegunowej Jiubiao xuan – piony ołowiane; Zhengyi – przyrząd do przeprowadzania
rektyfikacji innych instrumentów
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
6
Nawigacja - historia (5)
W roku 721 n.e. Chińczycy dokonywali określenia
szerokości geograficznej na podstawie pomiaru
długości cienia 2,5 metrowymi gnomami pomiędzy
Pekinem a Wietnamem.
Obliczyli, że na każde 640 km różnicy w szerokości
geograficznej długość cienia zmienia się dokładnie
o 8,9 cm.
Po długości cienia byli w stanie określać szerokość
geograficzną oraz kolejny dzień w roku.
1/25/2012
2
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
7
Jan Heweliusz - Sextans
Sekstant, Sextans,
niepozorny gwiazdozbiór leżący
w pobliżu równika niebieskiego, pomiędzy
Lwem,
Hydrą i Pucharem.
Opisał go J. Heweliusz
w
Prodromus astronomiae
. Sekstans instrument do
określania pozycji wg słońca czy gwiazd wynalazł
Brahe lub Newton / Hadley – zastosował
w żeglarstwie
Jan Heweliusz (1611-1687), w 1640 założył
w Gdańsku obserwatorium astronomiczne
(z instrumentami przeważnie własnoręcznie
wykonanymi), w którym dokonywał obserwacji
położeń planet, komet i gwiazd (podał współrzędne
600 nowych, opisał ich 1500), powierzchni
Księżyca, księżyców Saturna i Jowisza, zmian blasku
gwiazd zmiennych.
Nawigacja - historia (6)
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
8
Systemy nawigacji satelitarnej – historia (1)
1940 – LORAN – (USA) – National Defense Research Council
Washington D.C. sugeruje utworzenie nowego systemu nawigacji,
łączącego wykorzystanie sygnałów radiowych z nową technologią
pomiaru odstępów czasu docierania sygnału
Północny Atlantyk – WW II, prowadzenie konwojów alianckich
1953 – (ZSRR) pierwszy test rakiety balistycznej SS-1B SCUD,
wystrzelonej ze zmodyfikowanej łodzi podwodnej klasy ZULU
1957 – (USA) pierwszy udany lot pocisku balistycznego średniego zasięgu
U.S. Thor. Był on później wykorzystywany jako rakieta Delta, do
wynoszenia satelitów NAVSTAR
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
9
Systemy nawigacji satelitarnej – historia (2)
1957 – Sputnik – (ZSRR) „towarzysz podróży”, pierwszy sztuczny satelita Ziemi
Charakterystyka misji:
Rakieta nośna / miejsce startu: 8K71PS (s/n M1-1PS) / kosmodrom
Bajkonur (LC1)
Parametry orbity: 214 x 938 km; 96,19 m; 65,1°; e = 0,05201
Czas trwania: 4.X.1957 (09:12:00 UTC) - 25.X.1957 (wejście w atmosferę:
4.I.1958)
Ładunek: Dwa nadajniki radiowe: 20,005 MHz (15 m); 40,002 MHz (7,5 m)
Pierwsze badania propagacji fal radiowych przez jonosferę
Sputnik 1 – sygnał radiowy na falach 7,5 i 15 m; trzy razy w ciągu sekundy.
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
10
1958 – Explorer I – (USA) pierwszy amerykański satelita w kosmosie
Charakterystyka misji:
Rakieta nośna/miejsce startu: Jupiter C (s/n RS-29) / Przylądek Canaveral,
USA
Parametry orbity: 359 x 2542 km; 114,89 m; 33,1°
Czas trwania: 1.II.1958 (03:47:56 UTC) - 31.III.1970 (wejście w atmosferę)
Wymiary, masa: 203,2 cm x 15,24 cm; 13,97 kg
Ładunek:
Amerykański eksperyment Międzynarodowego Roku Geofizycznego
Eksperyment promieni kosmicznych (licznik GM)
Detektor mikrometeorytów
Systemy nawigacji satelitarnej – historia (3)
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
11
1958 – MINITRACK – (USA) śledzenie orbit radzieckich satelitów;
w 1961 r. przemianowany na NAVSPASUR; działa do dzisiaj
Naziemny pasywny system, wykorzystujący sygnały radiowe
emitowane przez satelity VANGUARD
Kontrola przestrzeni nad Stanami Zjednoczonymi
Systemy nawigacji satelitarnej – historia (4)
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
12
Systemy nawigacji satelitarnej – historia (5)
1960 – TRANSIT 1B – (USA) pierwszy satelita nawigacyjny – określenie
pozycji łodzi podwodnych, rakiet balistycznych w 2D, wykorzystanie
efektu Dopplera
Rakieta nośna/miejsce startu: Thor Able-Star (s/n 257)/Przylądek
Canaveral, USA
Parametry orbity: nie osiągnął orbity
Czas trwania: 13.IV.1960 (12:02 UTC) - 5.X.1967 (wejście w atmosferę)
Masa: 121 kg (600 kg, NSSDC Master Catalog)
1/25/2012
3
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
13
Systemy nawigacji satelitarnej – historia (6)
1964 – SECOR – (USA) (ang. Sequential Collation of Range) system
geodezyjny
4 przenośne stacje naziemne: 3 w miejscach o znanych
współrzędnych, 1 pomiarowa
Sygnały z 3 stacji naziemnych pozwalały określić pozycję satelity
Odległość satelity od stacji pomiarowej pozwalała określić jej
położenie
Punkt wyjścia dla systemów Timation i Navstar GPS
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
14
Systemy nawigacji satelitarnej – historia (7)
1967 – CYKLON – (ZSRR) pierwszy radziecki satelita geodezyjny
1967 – TIMATION – (USA) (ang. Time Navigation) system US Navy
Określenie pozycji 2D – propagacja czasu
Sygnał o bardzo stabilnej częstotliwości – oscylator kwarcowy
1974 r. pierwsze generatory kwarcowe, rubidowe i cezowe
Docelowo konstelacja 21 – 27 satelitów
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
15
Systemy nawigacji satelitarnej – historia (8)
1967 – 621B – (USA) odpowiednik TIMATION, realizowany przez US
Air Force, docelowo konstelacja 20 satelitów
Określenie pozycji 3D
PRN – Pseudo Random Noise – sygnał pseudolosowy –
wiadomości przypominające szum
1971 – Omega – (USA) cywilny system radionawigacyjny,
wykorzystanie niskich częstotliwości
8 stacji bazowych, większy zasięg niż LORAN, mała dokładność
(4 mile)
Zakończony w 1997 z powodu konkurencji ze strony GPS
1974 – CYKADA – (ZSRR) system drugiej generacji na bazie
CYKLONA
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
16
Systemy nawigacji satelitarnej – historia (9)
1973 – NAVSTAR GPS – (USA) Departament obrony podejmuje
decyzje o połączeniu programów militarnych US Navy – TIMATION
oraz US Air Force – 621B w celu stworzenia NAVSTAR GPS
1978 – NAVSTAR GPS – (USA) wystrzelenie pierwszego satelity
bloku I
NAVSTAR GPS obecnie, to:
24 h, ogólnoświatowy zasięg;
duża dokładność, określenie pozycji 3D;
określenie prędkości poruszania się obiektu ;
Propagacja precyzyjnego czasu;
jednolity układ współrzędnych dla całego świata WGS 84;
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
17
Systemy nawigacji satelitarnej – historia (10)
1994 – NAVSTAR GPS – (USA) osiągnięcie pełnej zdolności operacyjnej
2000 – NAVSTAR GPS – (USA) wyłączenie zakłócania SA sygnałów GPS
„ (...) Początkowo zbudowany przez Departament Obrony jako system
wojskowy, GPS stał się narzędziem w skali globalnej. Przynosi on korzyści
użytkownikom na całym świecie (...). Cywilni użytkownicy GPS stwierdzą
znaczne podniesienie dokładności systemu GPS po zniesieniu SA (Selective
Availability). (...)”
Fragment wystąpienia prezydenta USA W. J. Clintona w dniu 1 maja 2000
2000 – WAAS –Wide Area Augmentation System – uruchomienie systemu
satelitów geostacjonarnych (USA)
EGNOS – sygnał korekcyjny dla Europy (2 satelity InMarsat)
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
18
Globalny System Pozycjonowania NAVSTAR-GPS
17.04.1973 Departament obrony USA podejmuje decyzje o połączeniu
programów militarnych US Navy - Timation oraz US Air Force - 621B
w celu stworzenia NAVSTAR GPS
NAVSTAR GPS Joint Program Office (GPS JPO) - baza sił powietrznych
w Los Angeles skupia nastepujących członków:
US Air Force, US Navy, US Army, US Marine Corps, US Coast Guard, US
Defence Mapping Agency, NATO, Australia
NAVSTAR (1)
1/25/2012
4
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
19
Nawigacja - DGPS (2)
Globalny System Pozycjonowania NAVSTAR-GPS
Globalny System Pozycjonowania składa się z trzech modułów:
1) segmentu kosmicznego - 27 satelitów okrążających Ziemię;
2) segmentu kontroli - stacji kontrolujących i monitorujących
Departament Obrony USA,
3) segmentu użytkownika - odbiorników GPS, cywilni użytkownicy,
wojsko
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
20
NAVSTAR (1)
Segment kosmiczny GPS :
24 satelity, w tym 3 aktywne zapasowe
6 orbit kołowych, po cztery satelity na orbicie
odległość orbity od Ziemi około 20.200 km
kąt nachylenia płaszczyzny orbity 55 stopni do równika
czas obiegu połowa doby gwiazdowej (różnica ok. 4 minut w stosunku
do słonecznej)
konstelacja satelitów : minimum 5 powinno być widocznych z każdego
punktu Ziemi z prawdopodobieństwem 0.9996.
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
21
NAVSTAR (2)
Segment kontrolny:
Główna Stacja Nadzoru (MCS - Master Control Station) w Bazie Sił
Powietrznych Falcon w Colorado Springs
stacje monitorujące na Hawajach, w Kwajalein, Diego Garcia
i Ascesion - wyposażone są w anteny do łączności dwustronnej
z satelitami
dane ze stacji monitorujących przesyłane są do MCS gdzie
wyznaczane są efemerydy
satelitów i parametry ich zegarów
MCS okresowo przesyła satelitom efemerydy i poprawki zegara w celu
ich retransmisji w depeszy nawigacyjnej.
Satellite-tracking-station on Hawaii (Source: Schriever Air Force Base
Satellite Flyer Vol. 6; No.12)
www.kowoma.de/en/gps/control_segment.htm
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
22
NAVSTAR (3)
Segment użytkowników:
wojskowe i cywilne odbiorniki GPS do odbioru, dekodowania
i przetwarzania sygnału GPS
nawigacja (powietrzna, morska, lądowa),
wyznaczanie pozycji,
transfer czasu,
pomiary geodezyjne
cywilne odbiorniki do nawigacji wykorzystują jedynie kod C/A na
częstotliwości L1 jednak niektóre cywilne odbiorniki geodezyjne
mogą przetwarzać sygnał o częstotliwości L2 w celu uzyskania
dokładnych pomiarów
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
23
NAVSTAR - jak to działa ?
Satelita NAVSTAR
transmituje sygnały: L1 (1575.42 MHz) i L2 (1227.60 MHz).
Sygnał L1 jest przetwarzany dwoma pseudo-przypadkowymi
sygnałami zagłuszającymi: chronionymi kodem P (wojsko)
oraz kodem C/A .
Sygnał L2 zawiera jedynie kod P (dla użytkowników wojskowych)
Każdy satelita wysyła inny sygnał, co ułatwia odbiornikom
rozpoznanie, z którego satelity pochodzi dany sygnał.
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
24
NAVSTAR - jak to działa ?
Odbiornik GPS na podstawie opóźnienia sygnału - czasu jaki upływa od
wysłania sygnału przez satelitę do momentu jego dotarcia do odbiornika,
oblicza czas potrzebny na pokonanie tej drogi. Odbiornik nic nie mierzy
(!!!) a jedynie rozwiązuje układ 4 równań z 4 niewiadomymi.
Pomiar z jednego satelity określa pozycję na powierzchni sfery (promień
20.200 km), której środkiem jest miejsce położenia danego satelity. W
związku z błędem zegara cztery sfery satelitów wykorzystywanych do
pomiaru mogą nie przecinać się w jednym punkcie. Odbiornik dostosowuje
odczyty czasu z poszczególnych zegarów i w ten sposób podaje dokładną
informację o czasie i pozycji.
1/25/2012
5
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
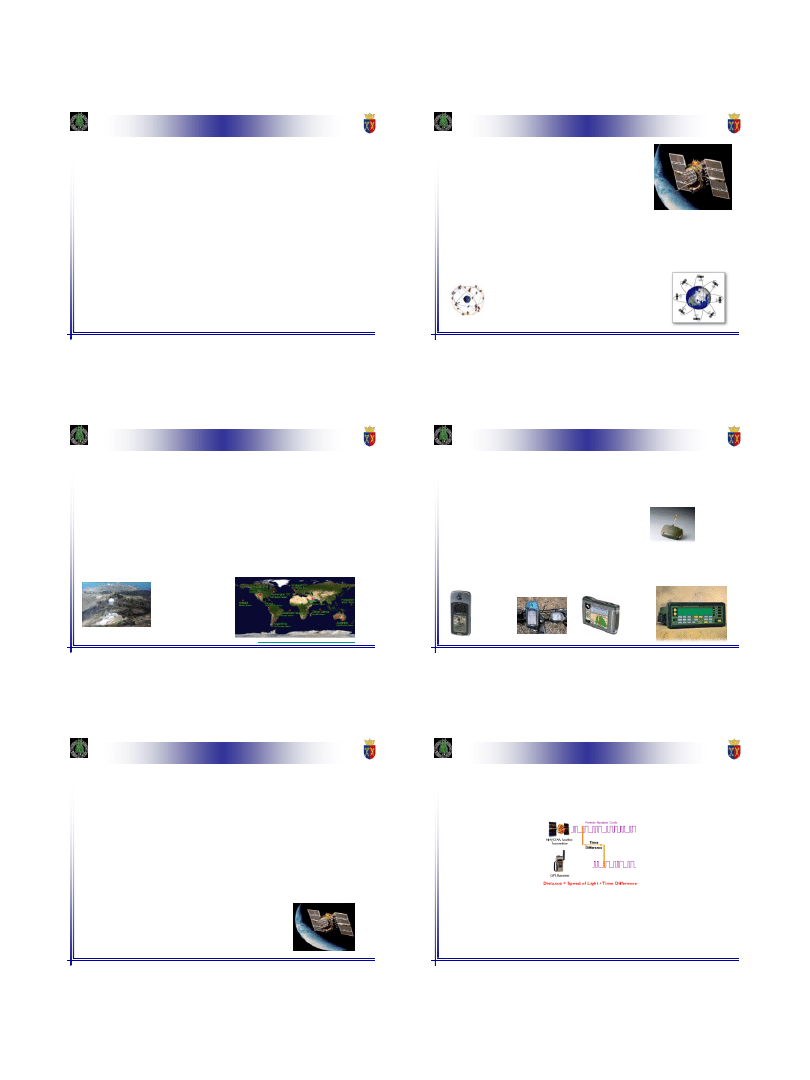
25
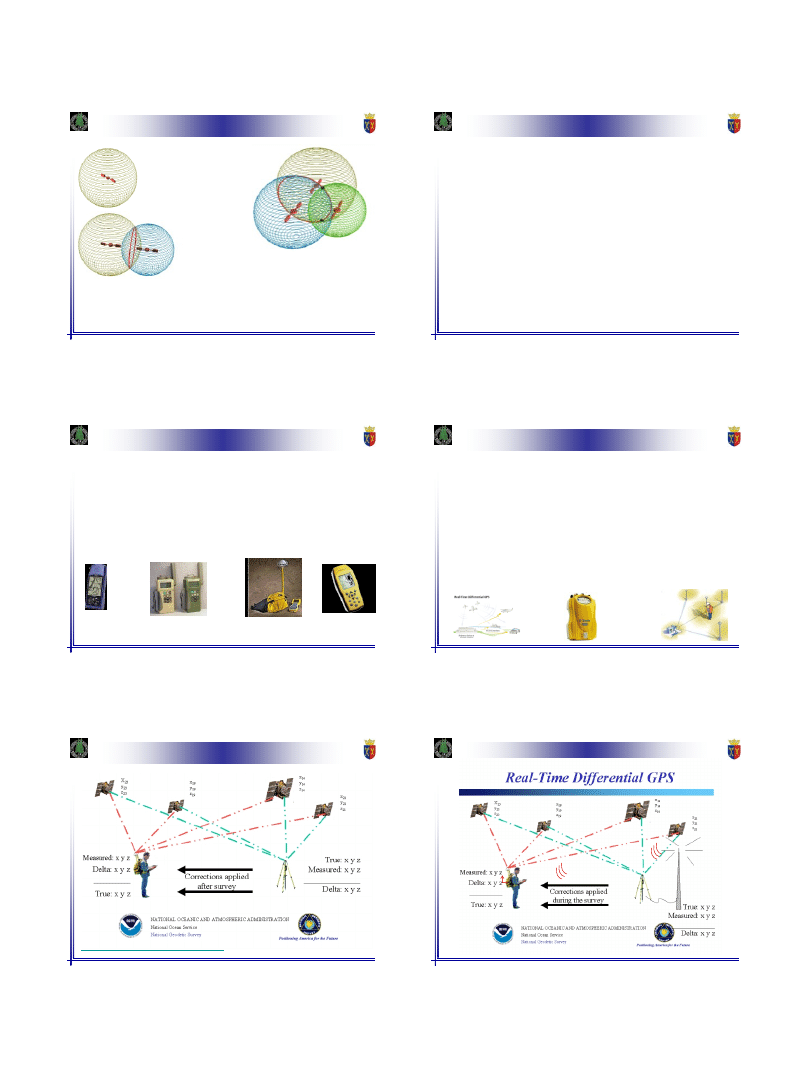
NAVSTAR - jak to działa ?
http://blog.xuite.net/lwkntu/blog/18689761
Odbiór sygnału jednego
satelity NAVSTAR odległego o
20200km daje każde miejsce
na sferze o tym promieniu
Odbiór sygnału od dwóch satelitów
NAVSTAR wyznacza czerwoną elipsę
teoretycznego położenia odległą o
20200 km od każdego
Odbiór sygnału od trzech
satelitów NAVSTAR wyznacza
dwa teoretyczne punkty.
Kolejne sygnały satelitów (PRN)
NAVSTAR potwierdzają
lokalizację tylko jednego z nich.
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
26
NAVSTAR - jak to działa ?
W przypadku wyznaczania pozycji istotną rolę odgrywa :
sposób rozmieszczenia satelitów na nieboskłonie (wartość
współczynnika PDOP),
Rozmycie dokładności (DOP) określane jest w stosunku do:
pozycji (PDOP) - dotyczy pomiarów poziomych i pionowych
(długość
geograficzna, szerokość i wysokość),
pomiarów poziomych (horyzontalnych, HDOP) – długość
i szerokość geograficzna,
pomiarów pionowych (wertykalnych, VDOP) - wysokość
czasu (TDOP) - dotyczy błędu zegara
dokładność efemeryd zawartych w depeszach kodu
siła docierającego sygnału (wartość SNR).
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
27
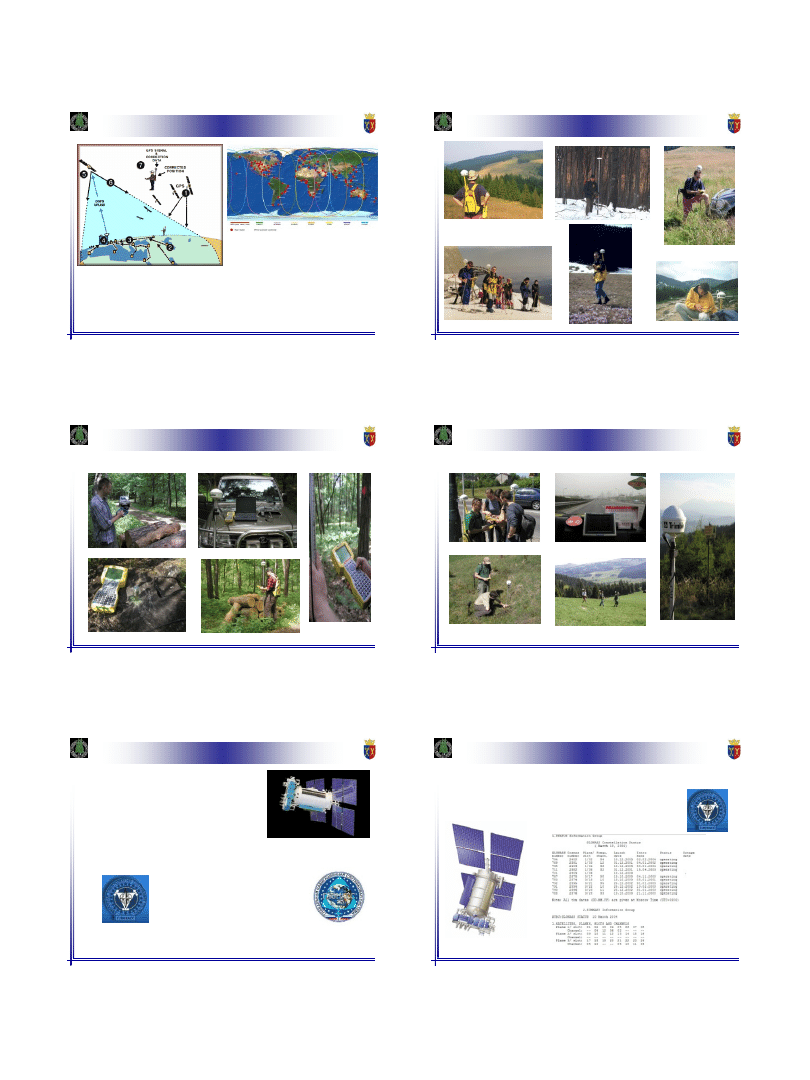
NAVSTAR - jak to działa ?
od 1,0 do 3,0 metra dla kodu C/A (kod ogólnie dostępny dla cywilnych
użytkowników przy sygnale WAAS, EGNOS)
Błędy pomiaru pseudoodległości zależne są od typu
odbiornika i wahają się w przedziałach :
od 10 do 30 cm dla kodu P (ograniczony dostęp dla użytkowników
cywilnych)
eMap Garmin
Odbiornik klasy
Turystycznej. Dokładność
5-10m
GLONASS
Pathfinder TRIMBLE
Odbiornik kartograficzny
GIS (dokłądność 1.0 - 0.3m)
Geo3 TRIMBLE –
Segment GIS; dokł.
ok. 1.0m
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
28
NAVSTAR – DGPS (1)
Pomiar różnicowy GPS (dGPS - ang.
differential
) to sposób usuwania błędów
pozycji ruchomego odbiornika GPS („rover”) przy wykorzystaniu wartości (błędów)
określonych w miejscu o znanej lokalizacji czyli na tzw. stacji bazowej
(korekcyjnej, referencyjnej). Dokładność odbiorników geodezyjnych 1 cm XYZ
Stacja referencyjna (bazowa) posiada precyzyjnie określoną pozycję X, Y i Z
przez co dla każdej sekundy pomiaru można określić różnicę (błąd; delta
xyz)
pomiędzy jej rzeczywistą lokalizacją (określoną geodezyjnie) a aktualnym
odczytem odbiornika GPS.
Wartość błędu (poprawka różnicowa) może być przesyłana do ruchomego
odbiornika (tryb RTK Real Time Kinematic – radio modem UKF, moduł GSM -
GPRS, RDS lub drogą satelitarną: OmniStar FUGRO, LandStar), dzięki czemu „on-
line” uzyskuje się poprawną pozycję na odbiorniku GPS typu „rover”.
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
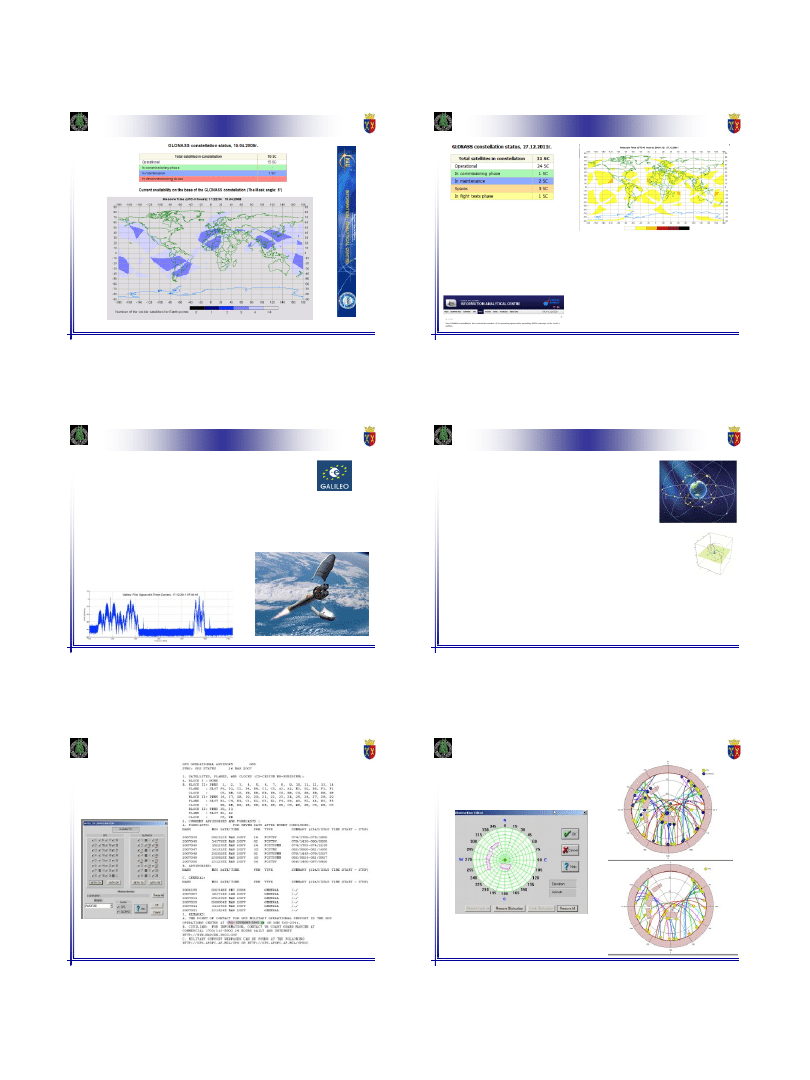
29
Differential GPS (dGPS) – post porcessing
http://www.ngs.noaa.gov/CORS/CorsPP/WA-SlideShow/index.htm
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
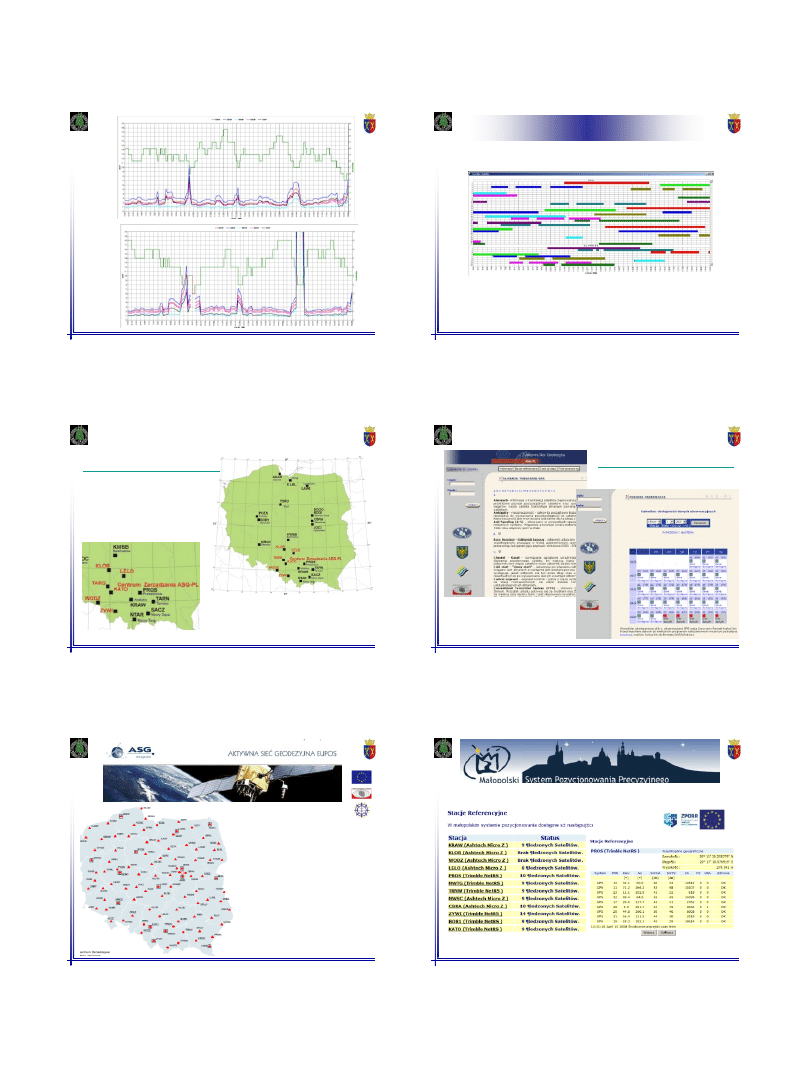
30
Differential GPS (dGPS) – RTK
1/25/2012
6
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
31
NAVSTAR – DGPS (2)
Zasada działania DGPS z poprawką
OmniStar drogą satelitarną (FUGRO)
Pokrycie sygnałem korekcyjnym z
poziomu satelitarnego komercyjną
poprawką firmy FUGRO.
OmniSTAR to jedyny komercycyjny system wspomagania SBAS (dla GPS i
GLONASS). Oferuje on poprawki GNSS prawie dla całej kuli ziemskiej w ramach
usług: VBS, XP, HP i G2, które pozwalają na pomiar pozycji z dokładnością do 10
cm. Firma TRIMBLE w 2011 roku wykupiła sporą część akcji właściciela FUGRO.
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
32
DGPS – zastosowania (1)
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
33
DGPS – zastosowania (2)
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
34
DGPS – zastosowania (3)
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
35
GNSS – konkurencja (1)
GLONASS - Rosja
24 satelity docelowo
rozmieszczenie na trzech orbitach
3 kołowe płaszczyzny orbitalne
nachylenie orbity 64.8
o
odległość od Ziemi około 19.100 km.
czas obiegu wynosi 11 godzin 15 minut
pełna zdolność operacyjna przewidywana na 1987 potem przesunięta na
2010 rok
1982 – GLONASS (Globalnaja Nawigacjonnaja Satelitarnaja Sistiema) –
(ZSRR) wystrzelenie pierwszych trzech satelitów
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
36
GLONASS – status konstelacji, 10 marzec 2004 - 10 sprawnych
satelitów na dwóch orbitach
GNSS – GLONASS (2)
1/25/2012
7
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
37
GNSS – GLONASS (3)
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
38
GNSS – GLONASS (4)
http://www.glonass-center.ru/en/
Administrator rosyjskiego systemu GLONASS poinformował 8 grudnia 2011, że
sygnały nawigacyjne tego rozwiązania oferują już pełne pokrycie dla całej kuli
ziemskiej. Osiągnięcie pełnego pokrycia możliwe było dzięki włączeniu na
początku grudnia br. 24. satelity generacji M. Wcześniej pewność wyznaczenia
pozycji z wykorzystaniem GLONASS można było mieć tylko na wyższych
szerokościach geograficznych, w tym na terytorium Rosji.
Koszt modernizacji GLONASS – 8 mld EUR,
wymiana satelitów na serię: K1, K2, KM.
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
39
GNSS – konkurencja (1)
GALILEO - UE
orbita ok. 23.000 km
docelowo 30 satelitów, dokładności ok. 4 m, gotowość 2019/20
2 satelity operacyjne na orbicie 21.10.2011 (wcześniej testowe GIOVE_A
2005 r oraz B 2008 rok) .
17.12.2011 – pierwsze testy nadawania na trzech częstotliwościach E1, E5
oraz E6 zakończone sukcesem
koszt dokończenia systemu 7 mld EUR
koszty obecne 6.4 mld EUR
planowane zyski 90 mld EUR
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
40
GNSS – konkurencja (2)
COMPASS (Beidou-2) 北斗导航系统 - Chiny
stan na grudzień 2011r. : 10 satelitów na orbitach
geostacjonarnych oraz okołobiegunowych. Planowane jest
wystrzelenie aż 30 satelitów okołobiegunowych i 5
geostacjonarnych. Dzięki 6 nowym satelitom jeszcze w
2012 roku system ma osiągnąć operacyjność w regionie
Azji i Pacyfiku. Do 2002 roku, po wystrzeleniu 35 aparatów,
sygnały Compass mają być dostępne na całym świecie.
Chiny zachęcają producentów odbiorników GPS do
zapoznania się ze specyfikacją Interface Control Document
(ICD) sygnału Beidou-2.
QZSS (Quasi-Zenith Satellite System; Juntencho (準天頂) – Japonia
• 3 satelity o eliptycznych orbitach do propagacji czasu i wspomagania określania
pozycji ( w tej chwili 3cm dokładności a bez RTK kilka metrów)
• korekcja sygnału podobnie jak WASS czy EGNOS
• 11.09.2010 wystrzelony pierwszy satelita, transmisja L1 C/A, L1C, L2C oraz L5
IRNSS – Indie (planowane do 2012). 7 satelitów (3 geostacjonarne)
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
41
Planowanie misji
pomiarowej
ALMANACH
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
42
NAVSTAR
+
GLONASS
NAVSTAR
Planowanie misji pomiarowej
Maskowanie horyzontu (H/V)
1/25/2012
8
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
43
NAVSTAR
+
GLONASS
NAVSTAR
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
44
Planowanie misji pomiarowej
Dostępność satelitów
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
45
Inicjatywa ASG-PL
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
46
Inicjatywa ASG-PL
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
47
84 stacji z modułem GPS,
14 stacji z modułem
GPS/GLONASS,
do 30 stacji zagranicznych
Stacje do 70 km odległe od siebie
Serwisy:
KodGIS ok. 25cm dokładności
NawGEO 3-5 cm
NawGIS ok. 1,0m
PozGEO 1 cm
PozGEO D 1 cm
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
48
http://www.gps.malopolska.pl/
1/25/2012
9
2012-01-25
5b_G Piotr Wężyk © 2012 Lab. GIS & RS WL UR
49
DGPS - słowa kluczowe
Słowa kluczowe:
GPS
DGPS
RTK
Kod P
Kod C/A
PDOP
Stacja bazowa GPS
Nawigacja GPS i DGPS
Rodzaje korekcji różnicowej
ASG-PL; ASG-EUPOS
GLONASS, COMPASS, GALILEO
WAAS, EGNOS
Wyszukiwarka
Podobne podstrony:
doWydruku 4 G Bazy danych 2012
doWydruku 5a G Topografia 2012
doWydruku 1 G Wprowadzenie geomatyki 2012
doWydruku 7 F CIR 2012
5b - lista lektur, matura 2012, maturzysci
Fizyka 0 wyklad organizacyjny Informatyka Wrzesien 30 2012
pmp wykład podmioty 2011 2012
Cukrzyca ciężarnych 2012 spec anestetyczki
KOMPLEKSY POLAKOW wykl 29 03 2012
Biotechnologia zamkniete użycie (2012 13)
Alergeny ukryte Sytuacja prawna w Polsce i na Świecie E Gawrońska Ukleja 2012
NIEDOKRWISTOŚCI SEM 2011 2012
ANALIZA RYNKU NIERUCHOMOŚCI KOMERCYJNYCH W KRAKOWIE W LATACH 2008 2012
WYKL 5b zmiana kształtu odlewu
więcej podobnych podstron