METODY PORÓWNANIA WIELKOSCI MIERZONEJ
Z WZORCEM
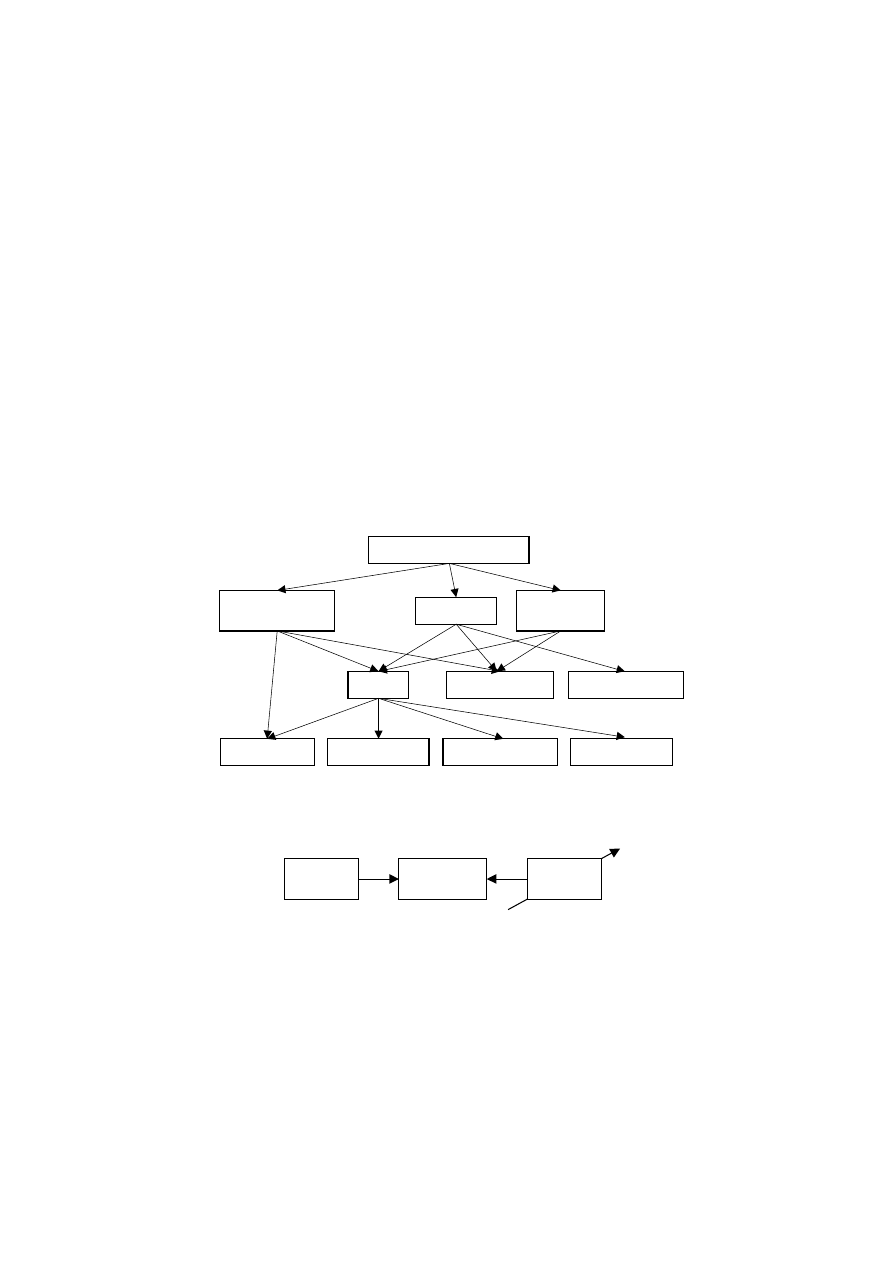
Klasyfikacja ze względu na zasadę pomiaru (rys. 2.1)
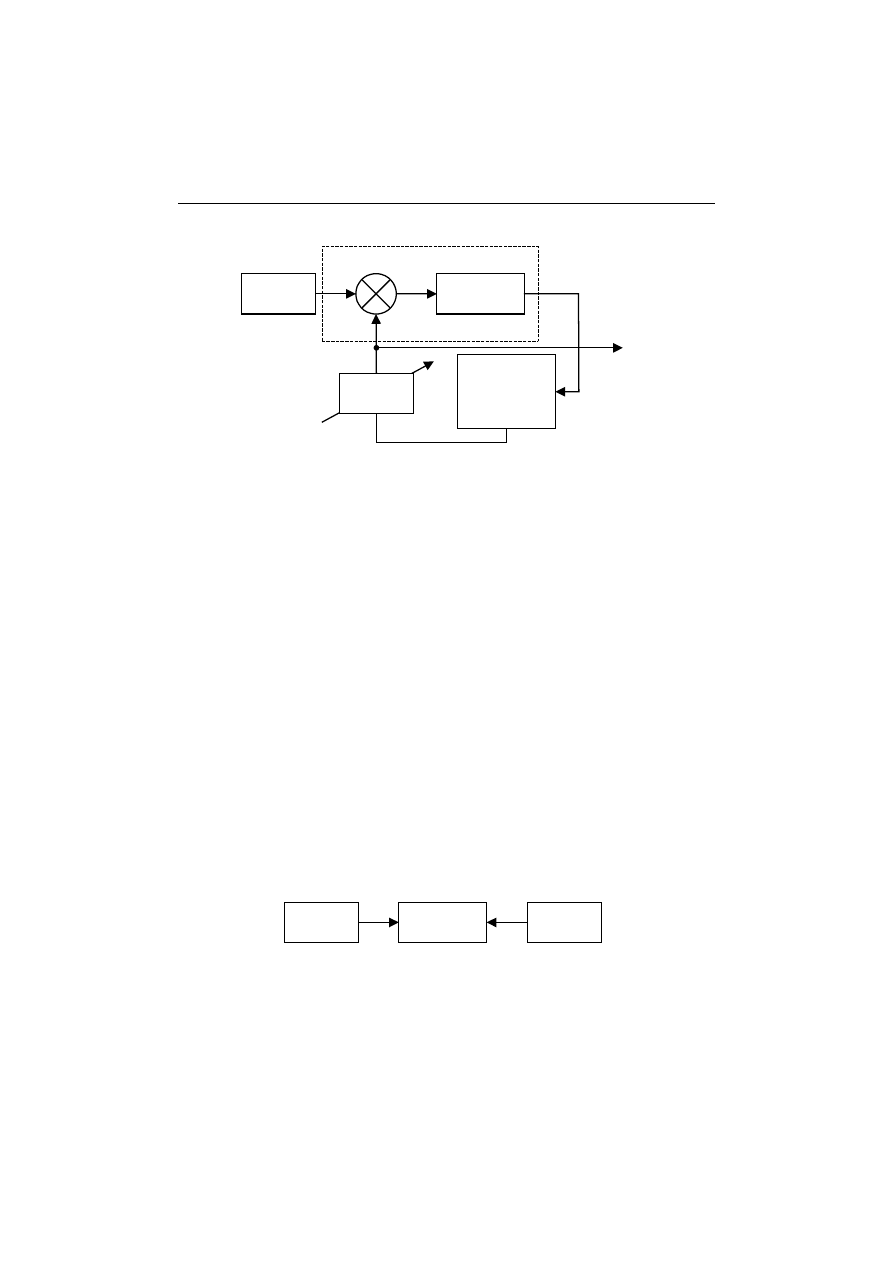
Metoda pomiarowa bezpośredniego porównania
Metoda pomiarowa bezpośredniego porównania polega na porówna-
niu wartości wielkości mierzonej z wartością znaną tej samej wielkości,
która w postaci wzorca wchodzi bezpośrednio do pomiaru. Zasadę tę
przedstawiono na rys.2.2.
Podstawienia
Przestawienia
Kompensacyjna
Komparacyjna
Zerowa
Wychyleniowa
Koincydencyjna
Bezpośredniego
porównania
Różnicowa
Pośredniego
porównania
Metody porównawcze
Rys.2.1. Klasyfikacja metod pomiarowych
Wielkość
mierzona
Układ
porównania
Wzorzec
nastawny
X
m
X
W
Rys.2.2. Zasada porównania bezpośredniego
Nastawę wartości wzorca prowadzi się do momentu, w którym układ po-
równania wskaże równość wartości mierzonej i wzorcowej, czyli

2
X
m
= X
WO
(2.1)
gdzie:
X
WO
- wartość wzorca X
W
, dla której układ porównania wskaże
równość X
m
i X
WO
.
Przyjmując, że wzorzec X
W
jest regulowany w sposób ciągły oraz, że
układ porównania wskaże dokładnie równość X
m
i X
WO
, błąd pomiaru
jest wówczas równy
∆X
m
=
∆X
W
+
∆X
S
(2.2)
gdzie:
∆X
W
- błąd wykonania wzorca,
∆X
s
- błąd niesymetrii układu porównania wyznaczony w metodzie
przestawienia.
Zależność (2.2) jest słuszna dla idealnego układu pomiarowego. W
rzeczywistym układzie pomiarowym wzorzec jest nastawiany w sposób
skokowy. Minimalną zmianę
∆Z wartości nastawianego wzorca nazywa
się rozdzielczością wzorca. Rozdzielczość wzorca
∆Z powoduje, że w
zasadzie nie jest możliwe otrzymanie dokładnej równości X
m
= X
WO
. Za
wartość mierzoną X
m
przyjmuje się więc te wartość X
WO
, dla której war-
tość bezwzględna różnicy |X
m
- X
W
| przyjmuje wartość najmniejszą ze
wszystkich możliwych nastawień wzorca X
W
. Przyjęcie, że X
m
= X
WO
mimo, że X
m
≠ X
WO
jest przyczyną powstawania błędu systematycznego
granicznego rozdzielczości, który jest równy
2
Z
X
Wr
∆
=
∆
(2.3)
W rzeczywistym układzie pomiarowym układ porównania może
wskazać zero już przy pewnej różnicy X
m
- X
WO
≠ 0. Maksymalna war-
tość tej różnicy, dla której układ porównania wskaże zero, jest nazywana
błędem pobudliwości (
∆X
pob
) (dawniej błędem nieczułości). Stąd całkowi-
ty błąd pomiaru w rzeczywistym układzie pomiarowym jest równy
∆X
m
=
∆X
W
+
∆X
S
+
∆X
Wr
+
∆X
pob
(2.4)
W większości przypadków dla żadnej wartości X
W
wzorca nastawne-
go układ porównania nie wskaże zero. Można wówczas przyjąć za war-
tość mierzoną X
m
taką wartość wzorca X
WO
, dla której różnica |X
m
- X
WO
|
3
jest najmniejsza. Błąd pomiaru X
m
oblicza się wówczas z zależności
(2.4).
Występujący w metodzie pomiarowej bezpośredniego porówna-
nia błąd niesymetrii układu porównania (
∆X
S
) można zmniejszyć
stosując metodę przestawienia lub metodę podstawienia.
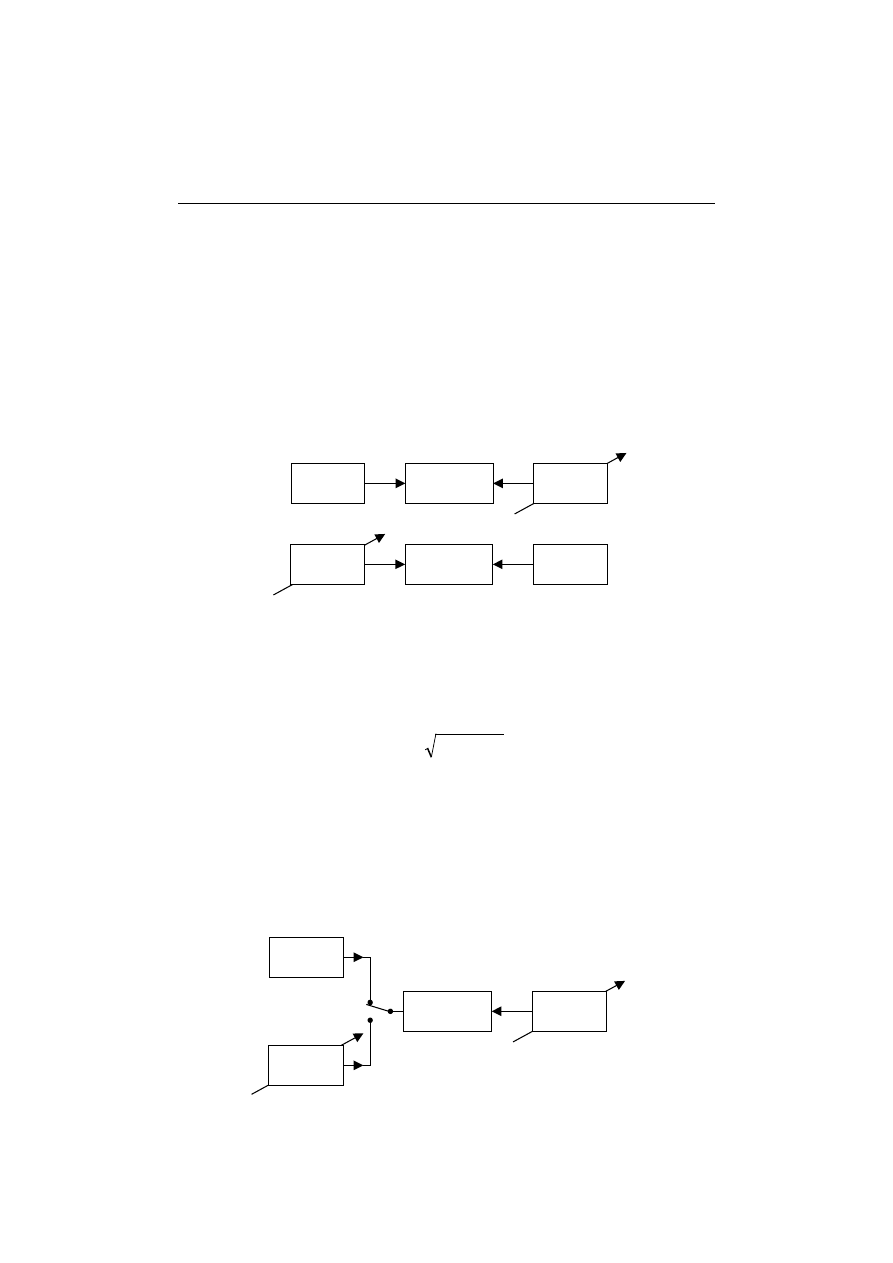
Metoda przestawienia (rys.2.3) polega na zrównoważeniu wartości
wielkości mierzonej najpierw za pomocą znanej wartości X
W1
tej wielko-
ści, następnie na przestawieniu wielkości mierzonej X
m
w miejsce wzor-
ca X
W
i ponownym zrównoważeniu jej znaną wartością X
W2
tej samej
wielkości.
Wielkość
mierzona
Układ
porównania
Wzorzec
nastawny
X
m
X
W
Wielkość
mierzona
Układ
porównania
Wzorzec
nastawny
X
W
X
m
Rys.2.3. Zasada pomiaru metodą przestawienia
Jeżeli układ porównania jest symetryczny (
∆X
S
= 0) to X
m
= X
W1
= X
W2
.
Natomiast jeżeli układ porównania jest niesymetryczny (X
W1
≠ X
W2
), to
wynik pomiaru wielkości X
m
jest średnią geometryczną z obu pomiarów
2
1
W
W
m
X
X
X
=
(2.7)
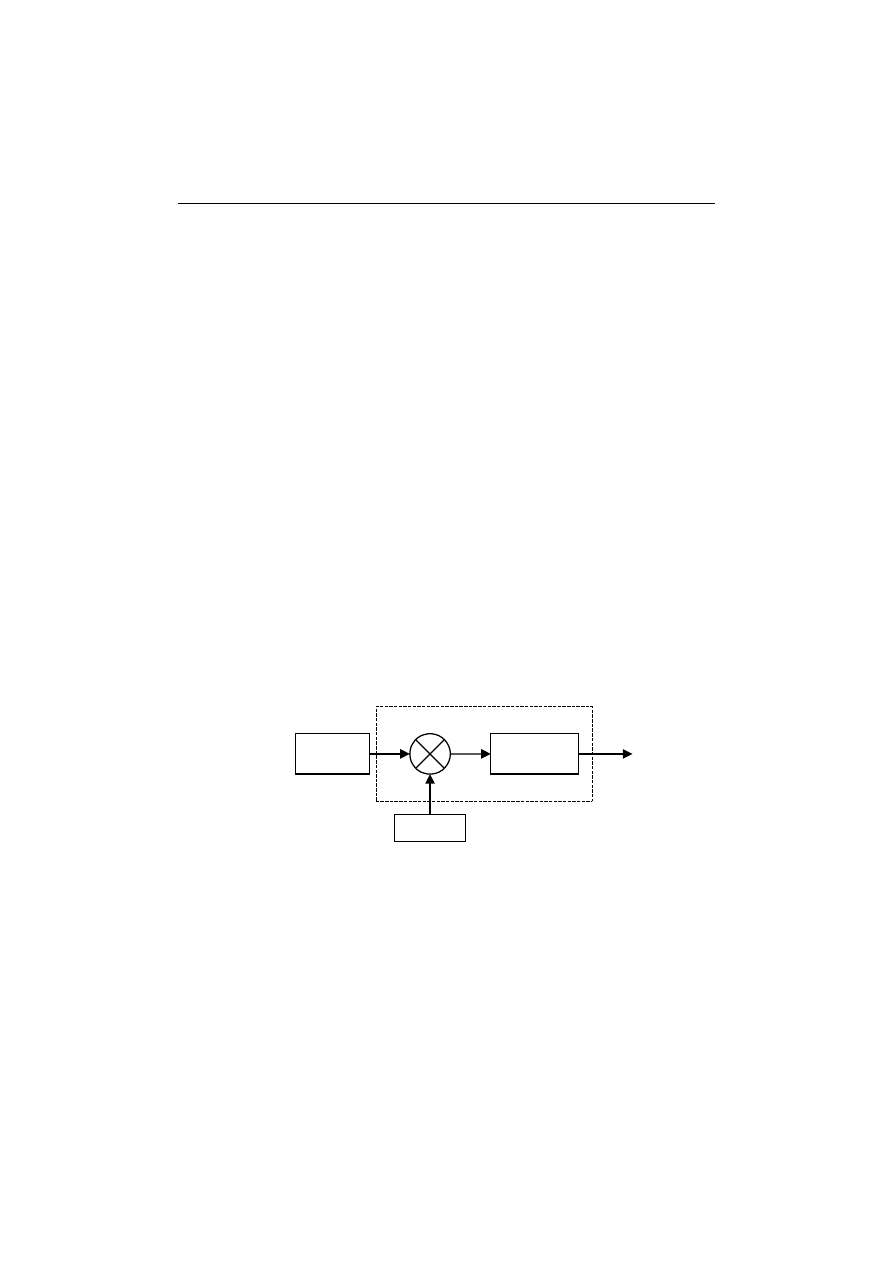
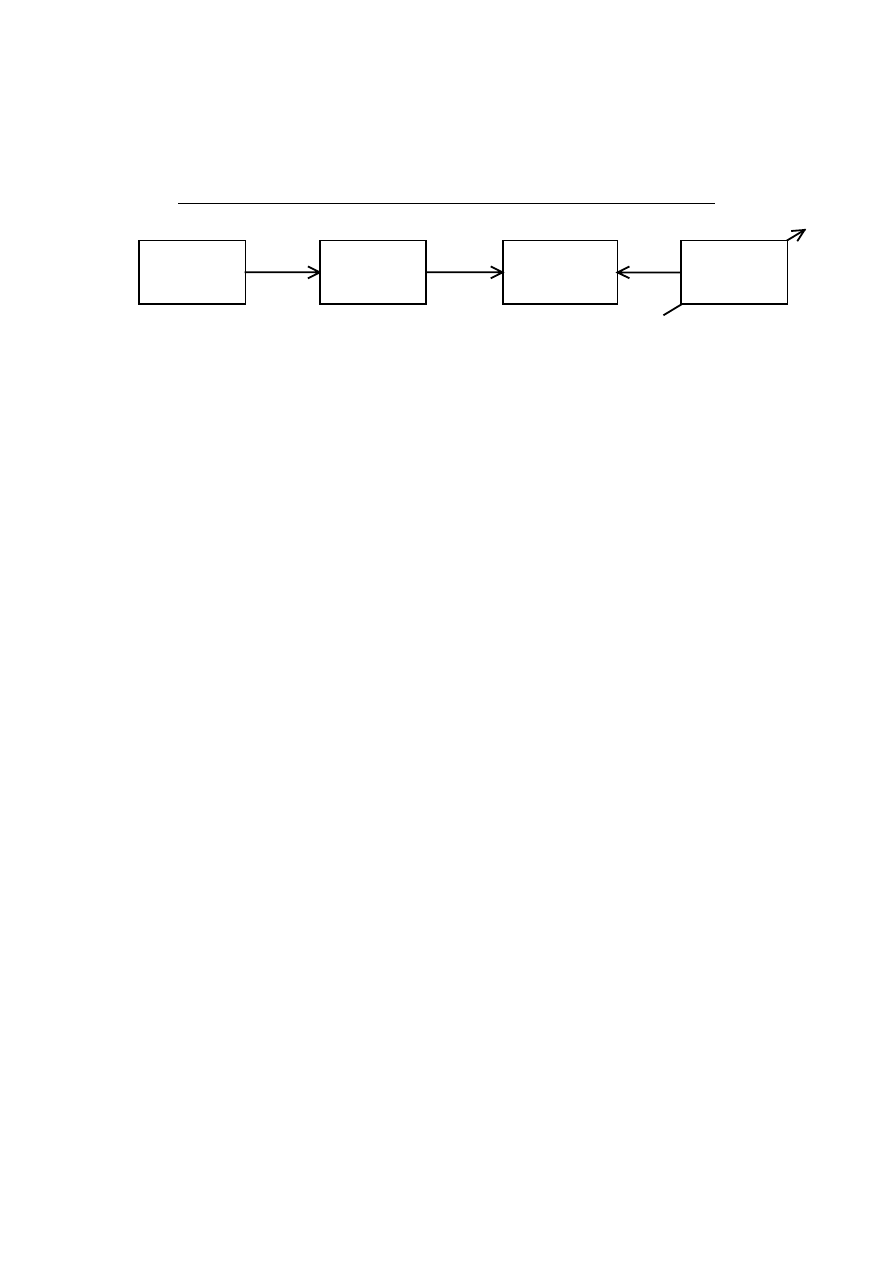
Metoda podstawienia polega na zastąpieniu wartości wielkości mie-
rzonej wartością znaną tej samej wielkości, wybraną w ten sposób, aby
skutki wywołane przez te dwie wartości były takie same. Na rys.2.4
przedstawiono zasadę pomiaru metodą podstawienia z wzorcem taro-
wym. W pierwszym etapie pomiaru do wejścia układu porównania
Wielkość
mierzona
Układ
porównania
Wzorzec
tarowy
X
m
X
T
Wzorzec
nastawny X
W
P
1
2
4
Rys.2.4. Zasada pomiaru metodą podstawienia z wzorcem tarowym
przyłącza się wielkość mierzoną X
m
(przełącznik P w pozycji 1). Wzo-
rzec tarowy nastawia się tak, aby otrzymać równowagę układu porów-
nania (X
m
= X
T1
). W drugim etapie pomiaru do wejścia układu porówna-
nia przyłącza się wzorzec nastawny X
W
(przełącznik P w pozycji 2) i na-
stawia się go na wartość X
WO
, dla której układ porównania wskazuje
stan równowagi. Wtedy X
WO
= X
T1
.
Jeżeli w obu fazach pomiaru wartość wzorca tarowego była stała, to
wartość zmierzona X
m
jest równa
X
m
= X
T1
= X
WO
(2.11)
a jej błąd pomiaru można wyznaczyć z zależności
∆X
m
=
∆X
W
+
∆X
Tr
+
∆X
Wr
+ 2
∆X
pob
(2.12)
gdzie
∆X
Tr
jest błędem rozdzielczości wzorca tarowego.
Metoda różnicowa
Metoda pomiarowa różnicowa polega na porównaniu wartości wielko-
ści mierzonej X
m
z niewiele różniąca się od niej znaną wartością tej sa-
mej wielkości X
W
i pomiarze różnicy r tych wartości (najczęściej metodą
wychyleniową). Zasadę tej metody przedstawiono na rys.2.5.
Wielkość
mierzona
Przyrząd
pomiarowy
X
m
X
W
Wzorzec
r=X
m
-X
W
y=f(r)
Układ porównania
Rys.2.5. Zasada pomiaru metodą różnicową
Wartość mierzona X
m
jest wówczas równa
X
m
= X
W
+ r (2.13)
a błąd bezwzględny jej pomiaru jest określony zależnością
∆X
m
=
∆X
W
+
∆r + ∆X
S
(2.14)
5
gdzie:
∆r - błąd pomiaru różnicy r.
Przyjmując, że błąd niesymetrii układu porównania jest równy zero, a
wartość wielkości mierzonej X
m
jest bliska wartości wielkości wzorcowej
X
W
(czyli IrI << X
W
) oraz wartość różnicy r jest mierzona przyrządem
wskazówkowym to błąd systematyczny pomiaru wielkości X
m
jest równy
r
m
Xw
Xm
X
r
δ
δ
δ
+
=
(2.15)
gdzie:
δ
Xw
- błąd względny wzorca,
δ
r
- błąd przyrządu do pomiaru różnicy r
Z zależności (2.15) wynika, że błąd przyrządu pomiarowego będzie
nieznacznie wpływał na błąd pomiaru X
m
, jeżeli stosunek.
1
〈〈
m
X
r
. Przy
spełnieniu tego warunku przyrząd pomiarowy może być znacznie mniej
dokładny niż wzorzec.
Metody różnicowe, umożliwiające uzyskanie dokładnych wyników,
znajdują zastosowanie w różnych gałęziach techniki, zwłaszcza w po-
miarach wielkości nieelektrycznych sposobami elektrycznymi. Przyrzą-
dami mierzącymi metodą różnicowa mogą być: waga odważnikowo-
uchylna, mostki niezrównoważone itp.
Metoda zerowa.
Metoda zerowa stanowi przypadek szczególny metody różnicowej.
Polega ona na sprowadzeniu do zera różnicy r między wartością wielko-
ści mierzonej X
m
, a znaną, nastawianą wartością wzorca X
W
tej samej
wielkości z nią porównywanej (rys.2.6). Nastawy wzorca X
W
ustalane są
ręcznie przez obserwatora lub automatycznie przez urządzenie wyko-
nawcze na podstawie wskazań wskaźnika zera. W chwili, gdy wskaźnik
zera wskaże zero (r = 0) wówczas wartość wielkości mierzonej X
m
jest
równa nastawionej wartości wzorca X
W.
6
Wielkość
mierzona
Wskaźnik
zera
X
m
X
W
r=X
m
-X
W
y=X
W
Obserwator
lub
urządzenie
wykonawcze
r
Wzorzec
nastawny
Układ porównania
Rys.2.6. Zasada pomiaru metodą zerową
Czynności związane ze sprowadzeniem do zera różnicy r = X
m
- X
W
nazywane są równoważeniem układu. Dokładność pomiaru wykonanego
metodą zerową zależy głównie od dokładności wielkości wzorcowej i od
właściwości układu pomiarowego.
Metoda zerowa jest metodą najczęściej stosowaną w metodach bez-
pośredniego porównania. Stąd przedstawione w pkt.2.2 rozważania od-
nośnie dokładności pomiaru dotyczą również metody zerowej. Metody
zerowe należą do tej grupy metod pomiarowych, w których można osią-
gnąć największe dokładności pomiaru wielkości mierzonej X
m
. W mier-
nictwie elektrycznym typowym przykładem metody zerowej są mostki
zrównoważone. Metoda zerowa oraz przedstawiona wcześniej metoda
różnicowa są przykładami porównania jednoczesnego wielkości mierzo-
nej z wzorcem.
Metoda kompensacyjna
Kompensacyjna metoda pomiaru wielkości fizycznych należy do me-
tod zerowych i polega na skompensowaniu skutków działania wielkości
mierzonej X
m
wielkością wzorcowa X
W
równą co do wartości i przeciwną
co do znaku; X
m
= X
W
(rys.2.7).
Wielkość
mierzona
Wskaźnik
zera
Wielkość
wzorcowa
X
m
X
W
Rys.2.7. Zasada pomiaru metodą kompensacyjną.

7
Metodami kompensacyjnymi można mierzyć wielkości fizyczne tego
samego rodzaju, będące nośnikami energii i mające charakter wektoro-
wy, np.: siły, napięcia. W metodzie kompensacyjnej wyróżnia się nastę-
pujące stany:
• X
m
= X
W
lub X
m
- X
W
= 0 - równowaga kompensacyjna, w stanie
kompensacji przyrząd (kompensator) nie pobiera energii z ukła-
du badanego, co jest zaletą tej metody,
• X
m
> X
W
- niedokompensowanie, przyrząd pobiera energię z układu
badanego,
•
X
m
< X
W
- przekompensowanie, przyrząd pobiera energię z układu
wzorcowego.
W
metodzie komparacyjnej porównuje się bezpośrednio wiel-
kość mierzoną X
m
ze znaną krotnością k wielkości wzorcowej X
w
.
Badając różnicę X
m
- kX
w
sprowadza się ją do zera przez regula-
cję współczynnika k. Dla stanu równowagi wartość wielkości mie-
rzonej oblicza się ze wzoru X
m
= kX
w
. Praktyczne znaczenie tej
metody polega na zastosowaniu wzorca odtwarzającego tylko
jedną wartość X
w
( wzorca jednomiarowego), a więc wzorca o
większej dokładności niż wzorce odtwarzające wiele wartości
(wzorce wielomiarowe).
Metoda wychyleniowa - polega na przetworzeniu wielkości mie-
rzonej na przesunięcie wskazówki względem podziałki.
Metoda pośredniego porównania
Dla wielu wielkości fizycznych nie ma układów porównań reagu-
jących na wartość lub różnicę wartości. Przetwarza się wówczas
wielkość mierzoną X
m
i wzorcową X
w
na inną wielkość, dla której
są takie układy.
Np. nie ma układów bezpośrednio reagujących na różnicę mas
(masę). Masa jednak w sposób naturalny jest przetwarzana w polu
grawitacyjnym Ziemi na siłę, którą mierzymy.
8
Wielkość
mierzona
Y=f(X
M
)
Układ
porównania
X
m
Y
m
Y
w
Wzorzec
nastawny
Rys. 2.8. Zasada porównania pośredniego: X
m
, X
w
- takie
same
wielkości, Y = f(X
w
) , Y = f(X
m
) - takie same przetworniki
wielkości
Ponieważ f( ) jest funkcją monotoniczną, z równania Y
m
=Y
w
otrzy-
muje się X
m
=X
w
.
Błąd pomiaru – jak w metodzie porównania bezpośredniego do-
datkowo powiększony o błędy wynikające z przetwarzania wielko-
ści.
Przykład: Pomiar masy za pomocą wagi dwuszalkowej na pod-
stawie zależności M=F
⋅l = m⋅g⋅l (M – moment siły)
Document Outline
Wyszukiwarka
Podobne podstrony:
2 Omów klasyfikacje metod nauczania., Metodyka
klasyfikacja narzedzi pomiarowych wzorce miar
03 Klasyfikacja osrodkow
ladunki 03 klasyfikacja ladunkow
Ogórek Skuza Frączek Przegląd metod pomiaru efektywności
POJĘCIE I KLASYFIKACJA METOD WYCHOWANIA, pedagogika opiekuńczo - wychowawcza
Komunikacja rynkowa zastosowanie jakosciowych metod pomiaru ogl─ůdalno┼Ťci
Podział i klasyfikacja metod nauczania, TPiAON UŚ, dydaktyka
Klasyfikacja metod wych i techniki
metod pomiaru odbiorników telewizyjnych, Anteny
03 Badania ilościowe i pomiar w pedagogice, Pedagogika społeczna, Metodologia badań społecznych, Bad
Bogaczewicz,hydrologia i nauka o ziemi, Przykłady metod pomiaru i obliczania przepływu
Klasyfikacja metod poprawione
Metod Pomiar ParamNadajnika, Elektronika i telekomunikacja-studia, rok III, sem V, teo
KLASYFIKACJA PRZYRZADÓW POMIAROWYCH I WZORCÓW MIAR DO POMIARU DŁUGOŚCI, PWR Politechnika Wrocławska,
klasyfikacje metod projekcyjnych
więcej podobnych podstron