
DROGI SZYNOWE cz. 5

KSZTAŁTOWANIE UKŁADÓW GEOMETRYCZNYCH TORU KOLEJOWEGO
Układ geometryczny toru kolejowego ma charakter przestrzenny i dlatego
należy go rozpatrywać w trzech płaszczyznach:
•
poziomej,
•
pionowej i
•
poprzecznej do osi toru.
W płaszczyźnie poziomej (in. w planie) podstawowymi elementami
W płaszczyźnie poziomej (in. w planie) podstawowymi elementami
układu są:
•
odcinki proste toru,
•
odcinki ułożone w łuku kołowym oraz
•
odcinki w łukach o zmiennej krzywiźnie (tzw. krzywe przejściowe).
Ponadto wyró
ż
nia si
ę
tzw. wstawki proste, czyli krótkie odcinki proste toru
uło
ż
one mi
ę
dzy dwiema krzywymi przej
ś
ciowymi lub dwoma łukami
kołowymi.
W płaszczyźnie pionowej (in. w profilu podłużnym) wyróżnia się:
•
odcinki toru o jednostajnym pochyleniu oraz
•
kołowe łuki wyokrąglające tzw. załomy profilu podłużnego.
W płaszczyźnie poprzecznej do osi toru (in. w przekroju poprzecznym)
występuje :
•
szerokość toru oraz
•
różnica wysokości toków szynowych (która na długości łuku
•
różnica wysokości toków szynowych (która na długości łuku
kołowego jest stała i nosi nazwę przechyłki).
Najkorzystniejszym rozwiązaniem geometrycznym trasy kolejowej w
płaszczyźnie poziomej byłaby prosta.
Ponieważ na skutek istniejących uwarunkowań terenowych nie jest to
możliwe, występuje konieczność zmiany kierunku trasy i zastosowania
w tym rejonie łuku kołowego w celu zapewnienia płynnego przejazdu
pojazdu szynowego.
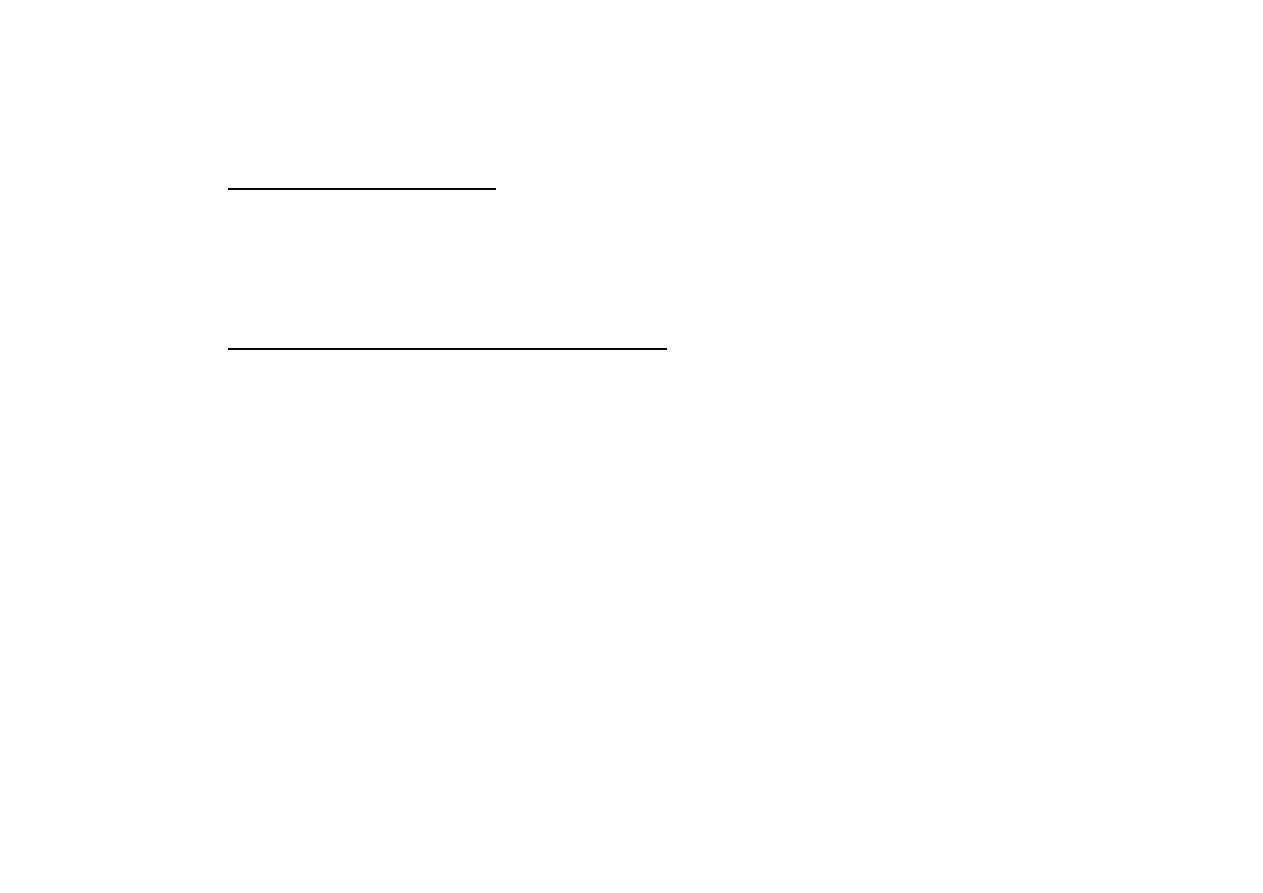
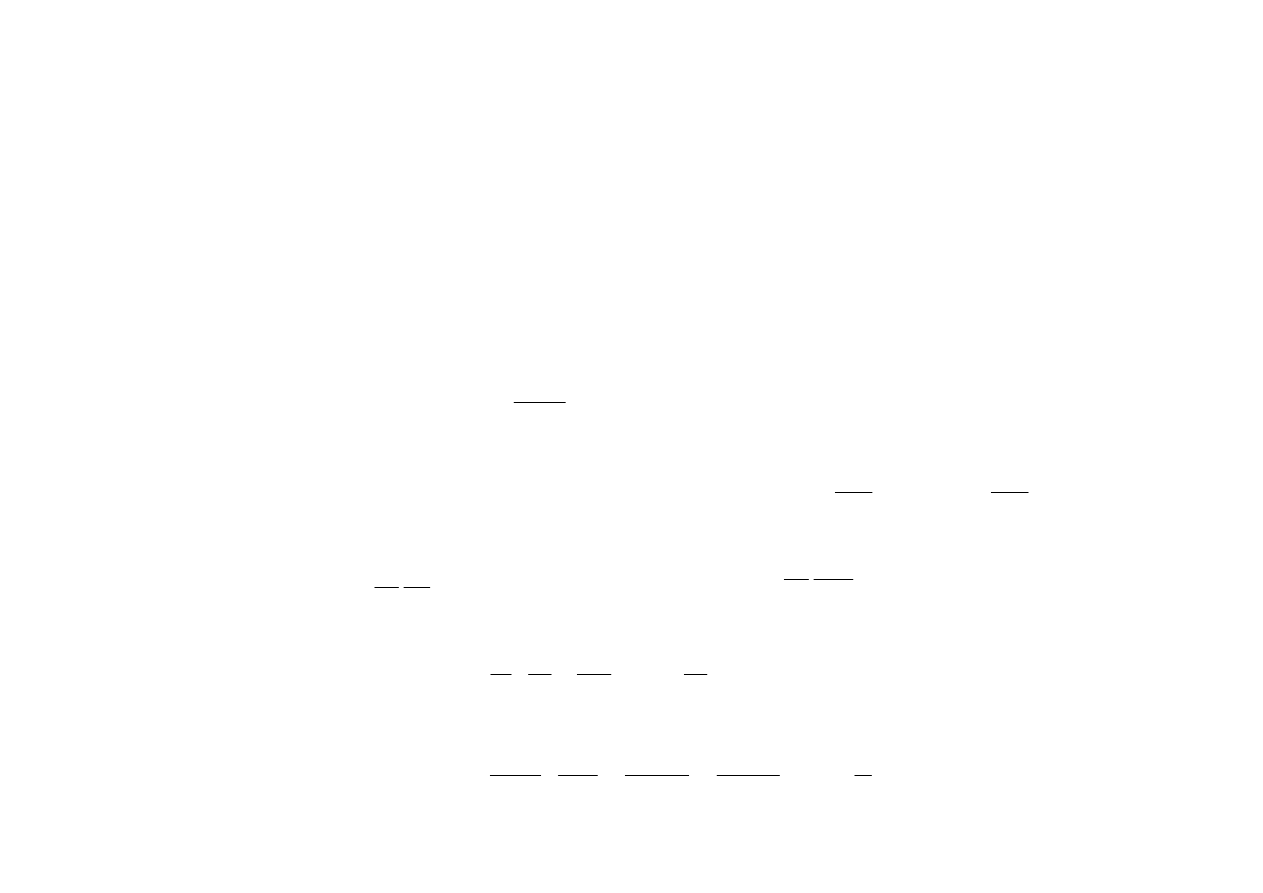
t
P
S'
K
S
α
h
Schemat połączenia kierunków głównych trasy za pomocą łuku kołowego
Długość połączenia kierunków głównych trasy zależy od kąta zwrotu
α
i zastosowanego promienia łuku kołowego R. Wartości stycznych t
wynikają z zależności
2
α
tg
R
t
⋅
=
Projektowanie łuku kołowego
Dla nowo projektowanej linii kolejowej ustala się jej podstawowe
wymagane parametry eksploatacyjne:
•
maksymalną prędkość pociągów pasażerskich v
p
[km/h],
•
prędkość pociągów towarowych v
t
[km/h],
•
natężenie przewozów q [Tg/rok].
Promień łuku kołowego o prędkości jazdy pociągów. Występuje na
nim bowiem przyspieszenie poprzeczne (odśrodkowe), którego
nim bowiem przyspieszenie poprzeczne (odśrodkowe), którego
wartość nie może przekroczyć określonej wartości dopuszczalnej.
Aby można było zmniejszyć wartość tego przyspieszenia i zastosować
jak największą prędkość, najczęściej podnosi się na łuku tok
zewnętrzny toru (poprzez odpowiednie przechylenie podkładów),
tworząc tzw. przechyłkę.
Pierwszym zadaniem projektanta jest określenie minimalnej
wartości promienia łuku kołowego R. Wyznacza się ją na podstawie
odpowiednich warunków, łączących parametry kinematyczne i
geometryczne.
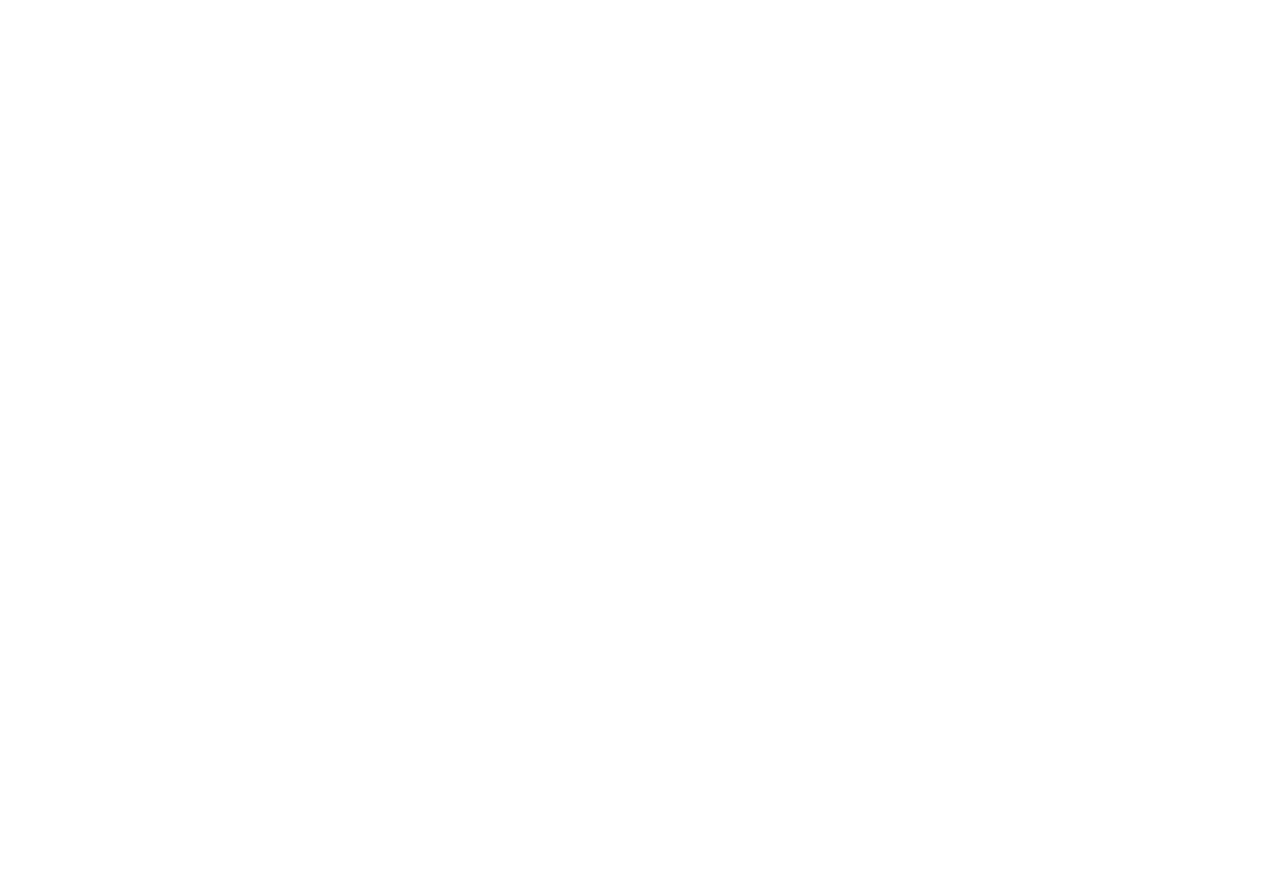
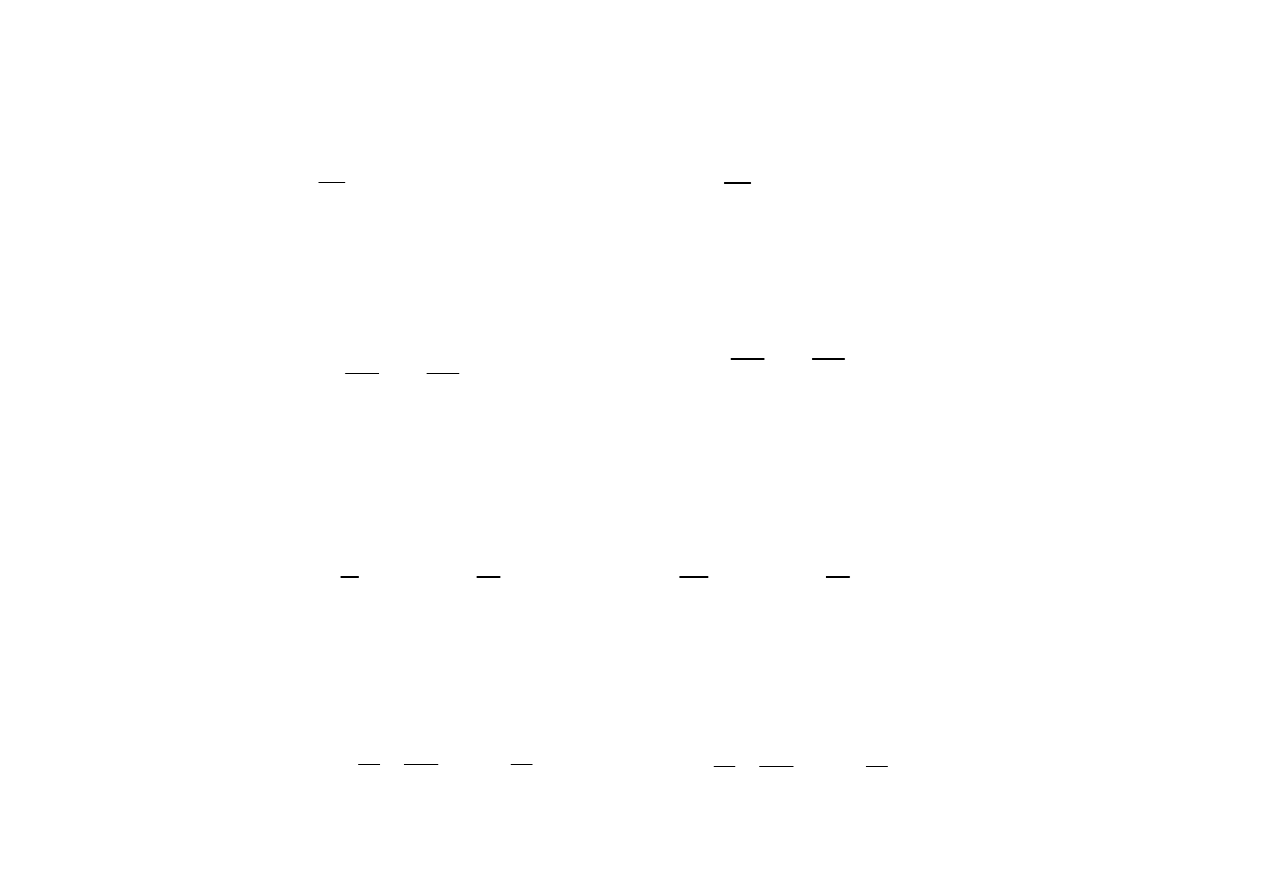
Ponieważ, zgodnie z wieloletnią tradycją, jako model pojazdu szynowego
przyjmuje się punkt materialny, na łuku kołowym powstaje sytuacja
przedstawiona na rysunku poniżej.
0
ϕ
a
W
a
Z
a
R
ϕ
h
s
ϕ
g
Płaszczyzna to ru
0
Przyspieszenia poprzeczne działające na pojazd szynowy
poruszający się po łuku kołowym
Przyspieszenia poprzeczne są one opisywane następującymi wzorami:
ϕ
cos
)
6
,
3
(
2
2
⋅
=
R
v
a
p
z
ϕ
sin
⋅
=
g
a
w
Występujący w tych wzorach kąt
ϕ
jest bezpośrednio związany z
wartością przechyłki h
0
. Sinus tego kąta (przy obowiązującym rozstawie
toków szynowych s) wynosi
s
h
0
sin
=
ϕ
Obowiązują zatem następujące zależności:
2
0
2
2
1
)
6
,
3
(
−
⋅
=
s
h
R
v
a
p
z
s
h
g
a
w
0
⋅
=
s
Ponieważ relacja h
0
/s nie przekracza 0,1, przyjmuje się, że
występujący we wzorze na a
z
pierwiastek kwadratowy jest równy 1.

Łuk powinien zostać tak zaprojektowany, aby wypadkowa przyspieszeń
nie przekroczyła odpowiedniej wartości dopuszczalnej, przy czym
obowiązują następujące warunki:
•
jeżeli a
z
> a
w
dop
p
a
g
s
h
R
v
≤
−
0
2
2
)
6
,
3
(
s
R
)
6
,
3
(
•
jeżeli a
z
< a
w
t
t
a
R
v
g
s
h
≤
−
2
2
0
)
6
,
3
(

Stosowane oznaczenia:
R
−
promień łuku kołowego [m],
h
0
−
wartość przechyłki na łuku [mm],
g
−
przyspieszenie ziemskie [m/s
2
],
s
−
rozstaw osi toków szynowych [mm],
a
dop
−
dopuszczalna wartość niezrównoważonego
przyspieszenia [m/s
2
],
a
−
dopuszczalna wartość przyspieszenia skierowanego do
a
t
−
dopuszczalna wartość przyspieszenia skierowanego do
wewnątrz łuku (zależna od natężenia przewozów q) [m/s
2
].
Wartości dopuszczalne przyspieszeń są określone przez obowiązujące
przepisy projektowania.
Wartości a
dop
zależą od rodzaju układu geometrycznego, natomiast
a
t
- od obciążenia linii przewozami.

Dopuszczalne wartości przyspieszenia niezrównoważonego a
dop
dla pociągów pasażerskich:
•
łuki i pojedyncze krzywe przejściowe dla torów, po których odbywa się
ruch z v < 160 km/h
a
dop
= 0,8 m/s
2
•
łuki i pojedyncze krzywe przejściowe dla torów, po których odbywa się
ruch z v
≥
160 km/h
a
dop
= 0,6 m/s
2
•
tory zwrotne rozjazdów zwyczajnych
a
dop
= 0,65 m/s
2
•
poszerzenia międzytorzy w dogodnych warunkach terenowych
a
dop
= 0,3 m/s
2
•
tory zwrotne rozjazdów zwyczajnych
a
dop
= 0,65 m/s
2
•
tory boczne na stacjach (v
≤
40 km/h)
a
dop
= 0,65 m/s
2
•
łuki o promieniach: 200 m < R
≤
250 m
a
dop
= 0,5 m/s
2
•
łuki o promieniach: R
≤
200 m
a
dop
= 0,45 m/s
2
•
poszerzenia międzytorzy w trudnych warunkach terenowych
a
dop
= 0,45 m/s
2

Dopuszczalne warto
ś
ci przyspieszenia niezrównowa
ż
onego a
t
dla
poci
ą
gów towarowych przy obci
ąż
eniu przewozami q [Tg/rok]:
• dla 0
≤
T < 5
a
t
= 0,6 m/s
2
• dla 5
≤
T < 10
a
t
= 0,5 m/s
2
• dla 10
≤
T < 15
a = 0,4 m/s
2
• dla 10
≤
T < 15
a
t
= 0,4 m/s
2
• dla 15
≤
T < 20
a
t
= 0,3 m/s
2
• dla T
≥
20
a
t
= 0,2 m/s
2
Jeśli założymy, że g = 9,81 m/s
2
i s = 1500 mm, otrzymujemy:
•
z warunku
dop
p
a
g
s
h
R
v
≤
−
0
2
2
)
6
,
3
(
dop
p
a
R
v
h
153
8
,
11
2
0
−
≥
•
z warunku
t
t
dop
p
a
R
v
h
a
R
v
153
8
,
11
153
8
,
11
2
0
2
+
≤
≤
−
t
t
a
R
v
g
s
h
≤
−
2
2
0
)
6
,
3
(
t
t
a
R
v
h
153
8
,
11
2
0
+
≤
stąd
t
t
dop
p
a
R
v
h
a
R
v
153
8
,
11
153
8
,
11
2
0
2
+
≤
≤
−
Wynika stąd przedział, z którego możemy przyjmować wartość
przechyłki h
0
dla różnych wartości promienia R.
W myśl obowiązujących przepisów wartość przechyłki powinna
mieścić się w granicach 20 mm
≤
h
0
≤
150 mm.
Przepisy określają też minimalne promienie łuku, uzależniając je od
kategorii linii kolejowych i ukształtowania terenu.

Minimalne promienie łuku R[m]
Linia magistralna
• w terenie nizinnym
1400
• w terenie podgórskim
1200
• w terenie górskim
600
Linia pierwszorz
ę
dna
• w terenie nizinnym
1200
• w terenie podgórskim
600
• w terenie górskim
400
• w terenie górskim
400
Linia drugorz
ę
dna
• w terenie nizinnym
600
• w terenie podgórskim
400
• w terenie górskim
300
Linia znaczenia miejscowego
• w terenie nizinnym
400
• w terenie podgórskim
250
• w terenie górskim
200

Minimalna długość toru w łuku kołowym powinna wynosić:
•
w torach głównych linii magistralnych i pierwszorzędnych
5
,
2
max
min
v
l
=
lecz nie mniej niż 30 m,
lecz nie mniej niż 30 m,
•
w torach głównych linii drugorzędnych – 30 m,
•
w pozostałych torach – 10 m.

Pomiędzy odcinkiem prostym toru i zaprojektowanym łukiem poziomym o
promieniu R powinna zostać wykonana tzw. krzywa przejściowa, na długości
której będzie występowała ciągła zmiana krzywizny toru.
Takie rozwiązanie zapewnia płynny przyrost niezrównoważonego
przyspieszenia od wartości zerowej na prostej do wartości am na łuku
kołowym.
Projektowanie krzywej przejściowej
Wartość przyspieszenia a
m
wynika z zależności
:
R
v
a
p
m
2
2
)
6
,
3
(
=
•
w przypadku braku przechyłki na łuku
s
h
g
R
v
a
p
m
0
2
2
)
6
,
3
(
−
=
•
w przypadku występowania na łuku przechyłki h
0
y
n
O
2
O
1
R
R
R
R
α
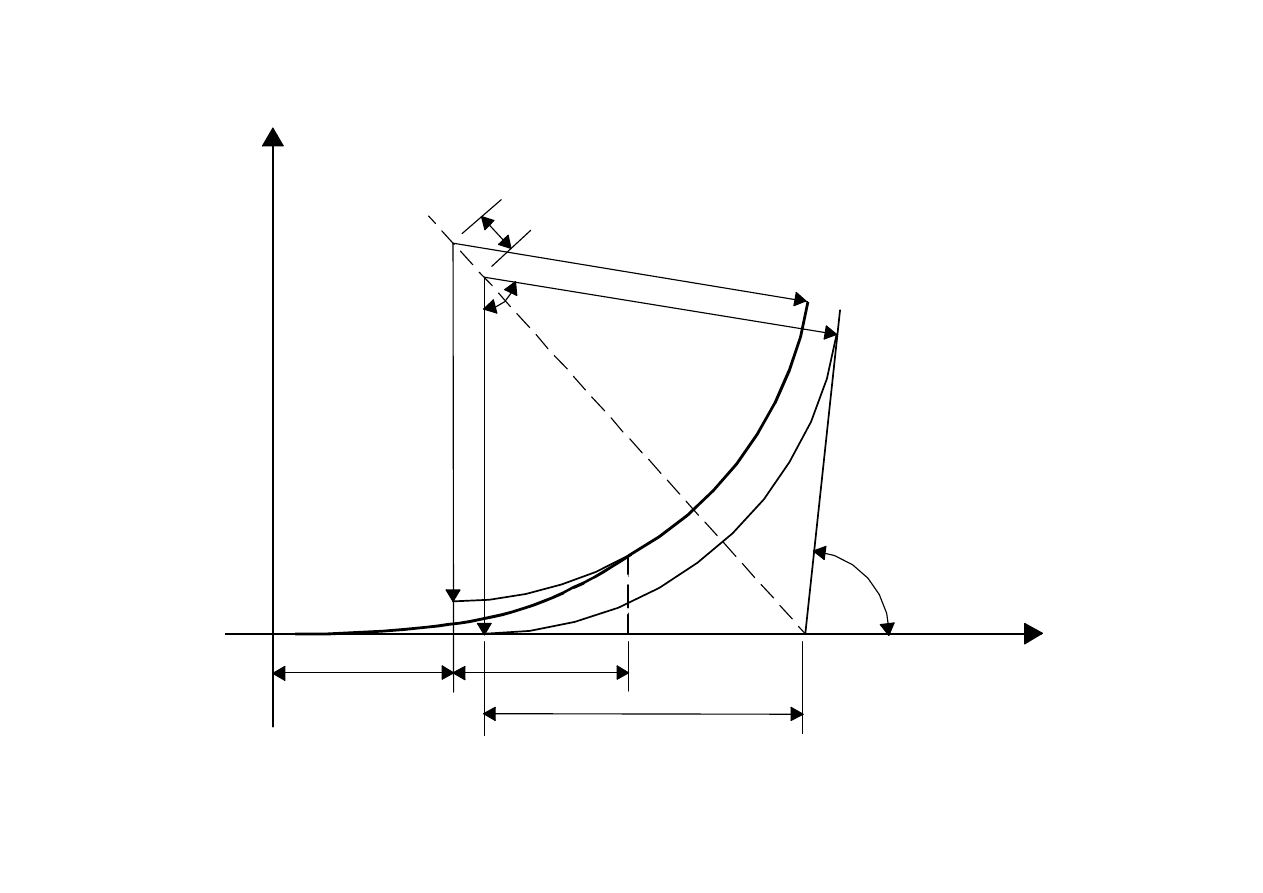
Ścisły sposób kształtowania krzywej przejściowej
x
0
t
α
R
R
K
K’
S
2
S
1
l/2
l/2
Z
T
R
K
ξ
R
S
y
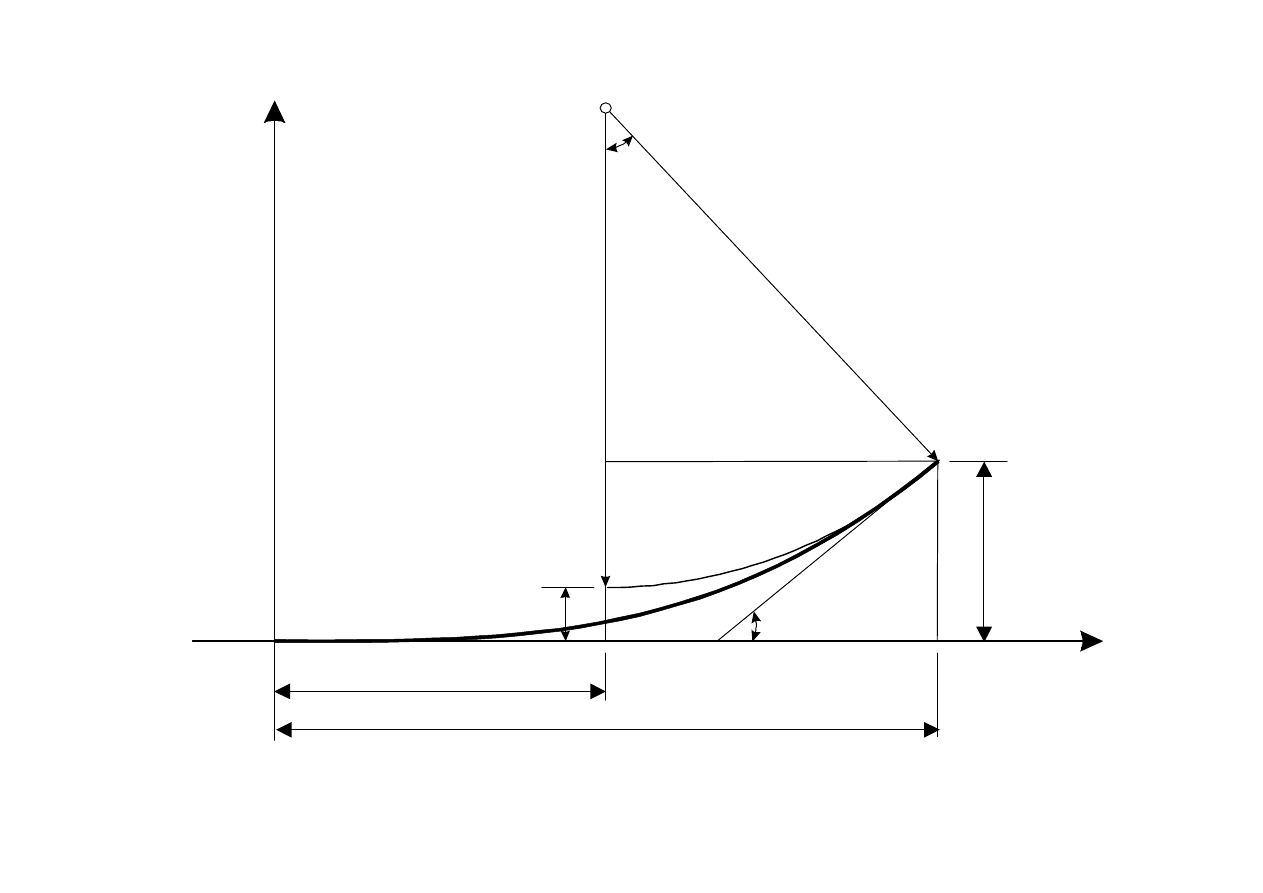
Stosowany sposób kształtowania krzywej przejściowej
l/2
l
n
y
k
K
’
x
T
E
F
K
ξ
H
0

Projektowanie układu geometrycznego ma na celu uzyskanie takiego
rozwiązania, które zapewni korzystny rozkład przyspieszeń, działających na
przejeżdżający tabor w kierunku poprzecznym do osi toru.
O wielkości tych przyspieszeń decyduje krzywizna toków szynowych w
płaszczyźnie poziomej i właściwe kształtowanie krzywizny stanowi
podstawowe zadanie procesu projektowego.
Miarą zakrzywienia łuku toru kolejowego jest stosunek kąta, o jaki zmienia
się kierunek osi podłużnej wagonu po przebyciu pewnego łuku, do długości
tegoż łuku.
∆α
∆α
M
∆
l
y
M
1
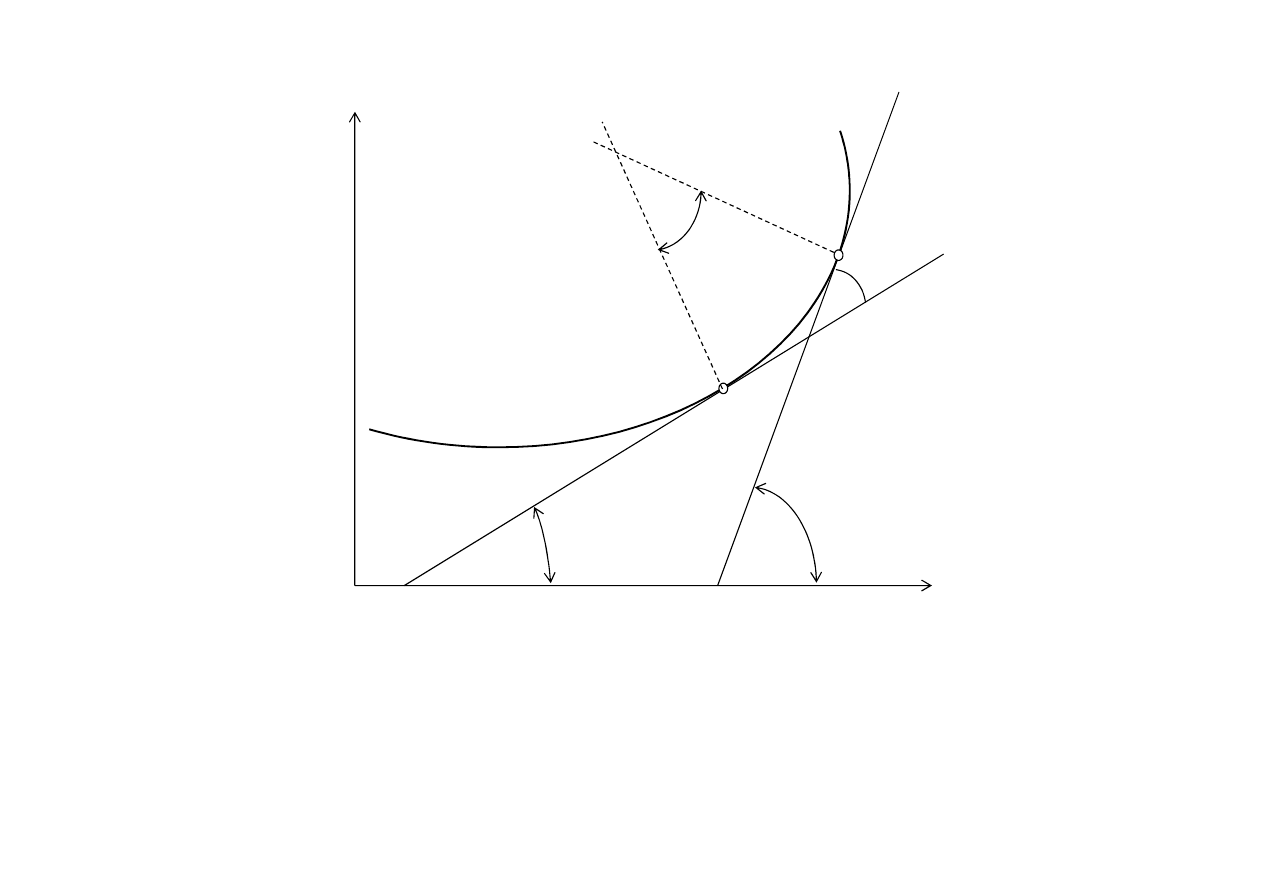
Schemat ideowy do wyjaśnienia pojęcia krzywizny toru
Krzywizną krzywej K w punkcie M nazywamy granicę, do której dąży stosunek
kata ostrego Δα zawartego między stycznymi do krzywej K w punktach M i M
1
do długości Δl łuku MM
1
, gdy punkt M
1
dąży po krzywej K do punktu M.
α
α
1
x
l
k
l
∆
∆
=
→
∆
α
lim
0
Dla łuku kołowego (tj. okręgu) o promieniu R kąt Δα jest równy kątowi
między promieniami dochodzącymi do punktów styczności i posiada
miarę łukową
R
l
∆
=
∆
α
R
R
l
1
=
∆
∆
α
Tak więc
stąd dla łuku kołowego
R
k
1
=
Znacznie bardziej złożona jest kwestia określania krzywizny na innych krzywych.
Generalnie mówiąc, jest ona zmienna na długości krzywej; pokażemy sposób jej
wyznaczania dla krzywej danej równaniem jawnym y = y(x).
Niech α oznacza skierowany kąt nachylenia stycznej do krzywej w punkcie M
o odciętej x do osi Ox .
Przy przejściu od M do M
1
: Δα = α
1
– α , Δx = x
1
– x , Δl = l
1
– l (mierzone po
krzywej K od punktu M
0
).
Granica stosunku
l
∆
∆
α
gdy
1
M
M
→
Granica stosunku
l
∆
gdy
1
M
M
→
x
l
x
x
l
x
l
k
l
l
l
l
∆
∆
∆
∆
=
∆
∆
∆
∆
=
∆
∆
=
→
∆
→
∆
→
∆
→
∆
lim
lim
lim
lim
0
0
0
0
α
α
α
czyli ostatecznie
dx
dl
dx
d
k
α
=
Żeby wyznaczyć
dx
d
α
należy określić kąt α .
Wykorzystujemy związek y’(x) = tg α
α(x) = arc tg y’(x). Tak więc
[
]
2
)
(
1
)
(
x
y
x
y
dx
d
′
+
′′
=
α
Do określenia pochodnej
dx
dl
wykorzystujemy wzór na długość krzywej
[
]
∫
′
+
=
dx
x
y
l
2
)
(
1
stąd
[
]
2
)
(
1
x
y
dx
dl
′
+
=
Po podstawieniu otrzymujemy
[
]
[
]
[
]
{
}
[
]
2
2
2
2
)
(
1
)
(
1
)
(
)
(
1
)
(
1
)
(
)
(
x
y
x
y
x
y
x
y
x
y
x
y
x
k
′
+
′
+
′′
=
′
+
′
+
′′
=

i ostatecznie
[
]
{
}
2
3
2
)
(
1
)
(
)
(
x
y
x
y
x
k
′
+
′′
=
Jak widać, struktura wzoru na krzywiznę jest więc dość złożona. Nie ma też
podstaw, żeby traktować dowolną krzywą jako ciąg łuków kołowych o
zmieniającym się promieniu (co uzasadniałoby wykorzystywanie wzoru na
krzywiznę łuku kołowego i jest niekiedy praktykowane).
krzywiznę łuku kołowego i jest niekiedy praktykowane).
Należy również zaznaczyć, że wzór opisuje krzywiznę odniesioną do osi
odciętych, nie zaś do długości samej krzywej. Tymczasem ruch pojazdów
szynowych odbywa się po krzywej i właśnie na długości krzywej należy
formować rozkład krzywizny.

Wyznaczanie krzywizny na krzywych przejściowych
Spróbujmy skupić się na samej krzywiźnie i zająć się jej rozkładem na długości
krzywej.
Nie będziemy więc wyznaczać krzywizny k(x), zależnej od przyjętego układu
współrzędnych, lecz krzywiznę k(l), dla której wymagania jesteśmy w stanie
określić jednoznacznie.
określić jednoznacznie.
Krzywizna k(l) powinna być opisana funkcją odpowiedniej klasy, żeby
wywoływała mniejsze (a więc korzystniejsze) oddziaływania dynamiczne.
Funkcji k(l) należy poszukiwać wśród rozwiązań równania różniczkowego
[
]
)
1
(
)
(
,...,
,
,
)
(
−
′
=
m
m
k
k
k
l
f
l
k
z warunkami na początku (dla l = 0) i na końcu (dla l = l
k
) krzywej przejściowej
1
)
(
,...,
2
,
1
,
0
0
)
0
(
n
i
dla
k
i
=
=
+
)
(
0
1
)
(
j
dla
R
l
k
j
=
=
−
Przedstawiony zapis matematyczny stanowi identyfikacje kształtu krzywych
przejściowych równaniami różniczkowymi i określa sposób na znalezienie rozwiązań
spełniających dowolną liczbę założonych warunków, przy czym dla danych
warunków mogą to być rozwiązania zupełnie różnej postaci.
2
,...,
2
,
1
0
)
(
n
j
dla
R
l
k
k
=
=
Otrzymana funkcja k(l) jest funkcja klasy C
n
w przedziale , gdzie
n = min (n
1
, n
2
).

Ze względów praktycznych korzystne będzie zapisywanie k(l) w postaci
)
(
1
)
(
l
g
R
l
k
=
gdzie g(l) – funkcja zmiennej l , zależna od rodzaju krzywej przejściowej,
przy czym
g(0) = 0,
g(l
k
) = 1.
Możemy wówczas łatwo określić rzędne rampy przechyłkowej (jeśli taka
występuje)
)
(
)
(
0
l
g
h
l
h
⋅
=
oraz przyspieszenie
)
(
)
(
l
g
a
l
a
m
⋅
=

Identyfikacja znanych rozwiązań
k(0
+)
= 0
k(l
k
−
) = 1/R
0
)
(
=
′′
l
k
1
1
l
c
c
l
k
2
1
)
(
+
=
k
l
l
R
l
k
1
)
(
=
k
l
l
l
g
=
)
(
0
1
=
c
k
l
R
c
1
1
2
=
W stosownych w kolejnictwie krzywych przejściowych – gdy
przyjmujemy układ współrzędnych, w którym początek krzywej jest
styczny do osi odciętych – wartość stycznej na długości jest niewielka.
Dlatego też możemy zastosować pewne przybliżenie. Standardowo
przyjmujemy, że zamodelowana krzywizna k(l) odnosi się do swego
rzutu na oś x , czyli że l = x .
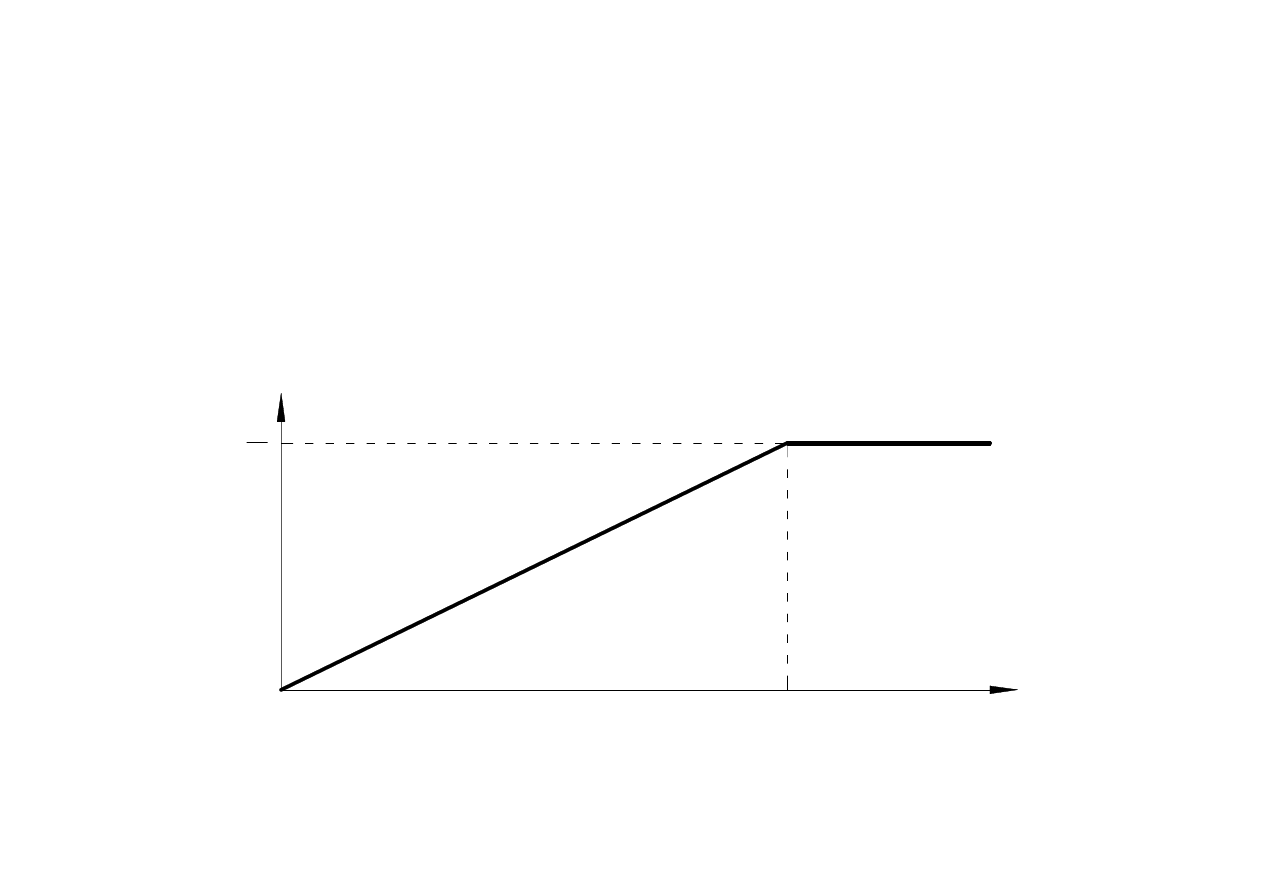
k
1
R
Wykres krzywizny liniowej
R
0
l
x

W wyniku takich założeń otrzymujemy równanie krzywizny
)
(
1
)
(
0
x
g
R
x
k
=
k
l
x
x
g
=
)
(
Znamy też równanie rampy przechyłowej
Znamy też równanie rampy przechyłowej
)
(
)
(
0
x
g
h
x
h
⋅
=
Traktujemy k
0
(x) jako krzywiznę wyjściową, będącą przybliżeniem
krzywizny docelowej k(x); pozwala nam to na znalezienie szukanej funkcji
y(x), jako rozwiązania równania różniczkowego
k
l
x
R
x
y
1
)
(
=
′′
Równanie to następnie dwukrotnie całkujemy, uwzględniając warunki:
y(0) = 0 i y’(0) = 0 . Otrzymujemy w ten sposób równanie krzywej
przejściowej w postaci paraboli trzeciego stopnia.
Rzędna końcowa krzywej przejściowej wynosi
k
l
R
x
x
y
⋅
⋅
=
6
)
(
3
R
l
l
x
y
k
k
⋅
=
=
6
)
(
2
a nachylenie stycznej na końcu
R
l
l
x
y
k
k
⋅
=
=
′
2
)
(

Powszechnie uznaje się, że liniową krzywiznę posiada krzywa przejściowa
w postaci paraboli trzeciego stopnia. Jest to tradycyjnie podstawowy
rodzaj krzywej przejściowej stosowany na drogach kolejowych.
Należy jeszcze wspomnieć o pewnej nieprawidłowości, która dotyczyć
będzie również innych rozpatrywanych krzywych przejściowych.
Równanie paraboli trzeciego stopnia nie spełnia warunku styczności
krzywej przejściowej z łukiem kołowym, tj.
)
(
)
(
+
−
′
=
′
k
k
l
y
l
y
Powiększamy dalej liczbę warunków
( ) ( )
0
0
0
=
′
=
+
+
k
k
( )
R
l
k
k
/
1
=
−
( )
0
=
′
−
k
l
k
i przyjmujemy równanie różniczkowe
0
)
(
)
4
(
=
x
k
3
4
2
3
2
1
)
(
x
c
x
c
x
c
c
x
k
+
+
+
=
c
1
= 0
c
2
= 0
2
3
3
1
k
l
R
c
=
3
4
2
1
k
l
R
c
−
=
⋅
−
⋅
=
3
5
2
4
10
4
1
)
(
k
k
l
x
l
x
R
x
y
−
=
3
3
2
2
2
3
1
)
(
k
k
l
x
l
x
R
x
k
k
1
R
1
2R
Przykładowa krzywizna o nieliniowym rozkładzie na długości
0
l/2
l
x
Zachowując cztery warunki zidentyfikujmy krzywiznę innym
równaniem różniczkowym
x
l
c
x
l
c
x
c
c
x
k
k
k
π
π
cos
sin
)
(
4
3
2
1
+
+
+
=
R
c
1
2
1
1
=
c
2
= 0
c
3
= 0
R
c
1
2
1
4
−
=
0
)
(
)
(
2
2
)
4
(
=
′′
+
x
k
l
x
k
k
π
R
2
−
⋅
=
k
l
x
R
x
k
π
cos
1
2
1
)
(
−
+
⋅
=
1
cos
2
2
1
)
(
2
2
2
k
k
l
x
l
x
R
x
y
π
π
Zakładamy jeszcze większą liczbę warunków
( ) ( )
0
)
0
(
0
0
=
′′
=
′
=
+
+
+
k
k
k
( )
R
l
k
k
/
1
=
−
( )
0
)
(
=
′′
=
′
−
−
k
k
l
k
l
k
0
)
(
4
)
(
)
4
(
2
2
)
6
(
=
+
x
k
l
x
k
k
π
c
1
= 0
x
l
c
x
l
c
x
c
x
c
x
c
c
x
k
k
k
π
π
2
cos
2
sin
)
(
6
5
3
4
2
3
2
1
+
+
+
+
+
=
k
l
R
c
1
1
2
=
c
3
= c
4
= 0
π
2
1
1
5
R
c
−
=
c
6
= 0
−
=
k
k
l
x
l
x
R
x
k
π
π
2
sin
2
1
1
)
(
⋅
+
⋅
⋅
−
⋅
⋅
=
l
x
l
x
l
l
x
R
x
y
π
π
π
2
sin
4
2
3
2
1
)
(
3
2
2
3
Rampa przechyłkowa
Jeśli na łuku kołowym została zastosowana przechyłka, wówczas na
długości krzywej przejściowej wykonuje się rampę przechyłkową, czyli
łagodne przejście od toru bez przechyłki na prostej do toru na łuku z
podniesionym tokiem zewnętrznym.
Rzędne rampy przechyłkowej h(x) muszą odpowiadać krzywiźnie
k(x) krzywej przejściowej, od której zależy charakter występującego
k(x) krzywej przejściowej, od której zależy charakter występującego
przyspieszenia odśrodkowego.
h(x) = h
0
g(x)
•
dla paraboli trzeciego stopnia
•
dla krzywej Blossa
k
l
x
x
g
=
)
(
k
l
x
h
x
h
⋅
=
0
)
(
3
3
2
2
2
3
)
(
k
k
l
x
l
x
x
g
−
=
−
=
3
3
2
2
0
2
3
)
(
k
k
l
x
l
x
h
x
h
•
dla cosinusoidy
•
dla sinusoidy
−
=
k
l
x
x
g
π
cos
1
2
1
)
(
−
=
k
l
x
h
x
h
π
cos
1
2
)
(
0
k
k
l
x
l
x
x
g
π
π
2
sin
2
1
)
(
−
=
−
=
k
k
l
x
l
x
h
x
h
π
π
2
sin
2
1
)
(
0
Wyszukiwarka
Podobne podstrony:
DROGI SZYNOWE PREZ 5
DROGI SZYNOWE PREZ 9
DROGI SZYNOWE PREZ 2
osiagniecia pl prez id 341234 Nieznany
DROGI SZYNOWE PREZ 8
DROGI SZYNOWE PREZ 4
DROGI SZYNOWE PREZ 6
DROGI SZYNOWE PREZ 1
DROGI SZYNOWE PREZ 3
DROGI SZYNOWE PREZ 7
drogi publ 2011 id 142680 Nieznany
DROGI SZYNOWE PREZ 5
DROGI SZYNOWE PREZ 2
DROGI SZYNOWE PREZ 7
DROGI SZYNOWE PREZ 9
DROGI SZYNOWE PREZ 8
Opis drogi id 336893 Nieznany
więcej podobnych podstron