Egzamin z Automatyki i Robotyki
24.02.2011
1. Narysować charakterystyki elementu z podaniem współrzędnych punktów
charakterystycznych o transmitancji 𝐺(𝑠) =
5
2𝑠+1
a) Charakterystyka skokowa
b) Charakterystyka impulsowa
c) Charakterystyka Nyguista
d) Charakterystyka Bodego
2. Co to jest transmitancja operatorowa, podać własności i parametry elementu o równaniu
ruchu 3𝑦̇ + 𝑦 = 0.5𝑥̇
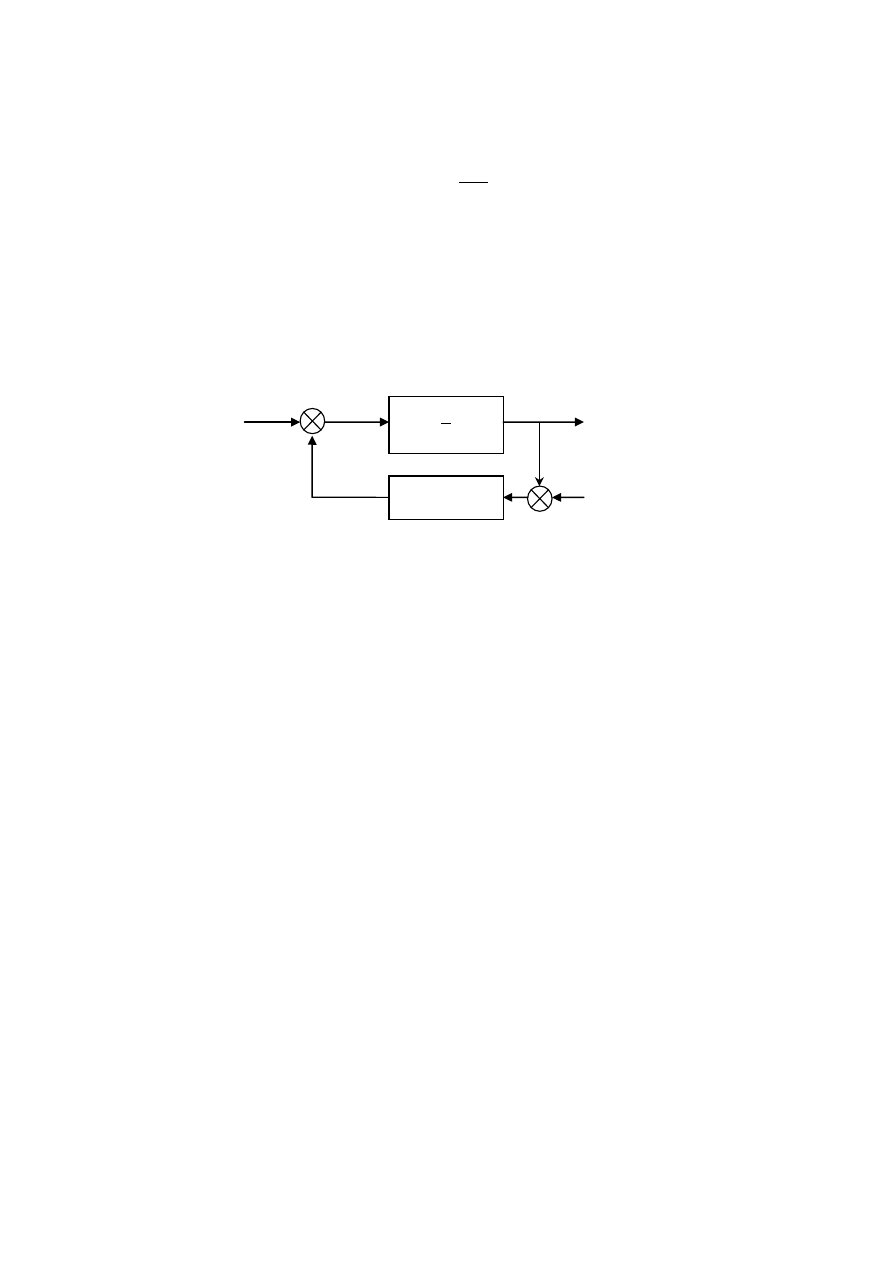
3. Wyznaczyć transmitancję układu zamknietego i określić własności tego układu względem
sygnału Y
0
:
Z(s)
Y(s)
-
Y
1
(s)
E(s) -
Y
0
(s)
4. Podać różnice między obiektami statycznymi i astatycznymi, różnice zinterpretować
graficznie.
5. Jak wzmocnienie regulatora k
p
wpływa na przeregulowanie w układzie regulacji, odpowiedź
zinterpretować graficznie.
6. Przedstawić kryterium stabilności Nyquista, ocenić je w porównaniu do kryterium Hurwitza,
odpowiedź przedstawić graficznie na wykresie Bodego.
7. Opisać parametry oceny jakości regulacji na charakterystyce Bodego.
8. Przedstawić równania kryterialne oraz wykres Nyquista i Bodego, które uwzględniają podane
parametry:
a) ΔM=0.35 ,
b) Δϕ=30 ̊
2
𝑠
3
Egzamin poprawkowy z Automatyki i Robotyki
07.02.2011
1. Narysować charakterystyki elementu z podaniem współrzędnych punktów
charakterystycznych o transmitancji 𝐺(𝑠) =
5
𝑠
2
+2𝑠+4
e) Charakterystyka skokowa
f) Charakterystyka impulsowa
g) Charakterystyka Nyguista
h) Charakterystyka Bodego
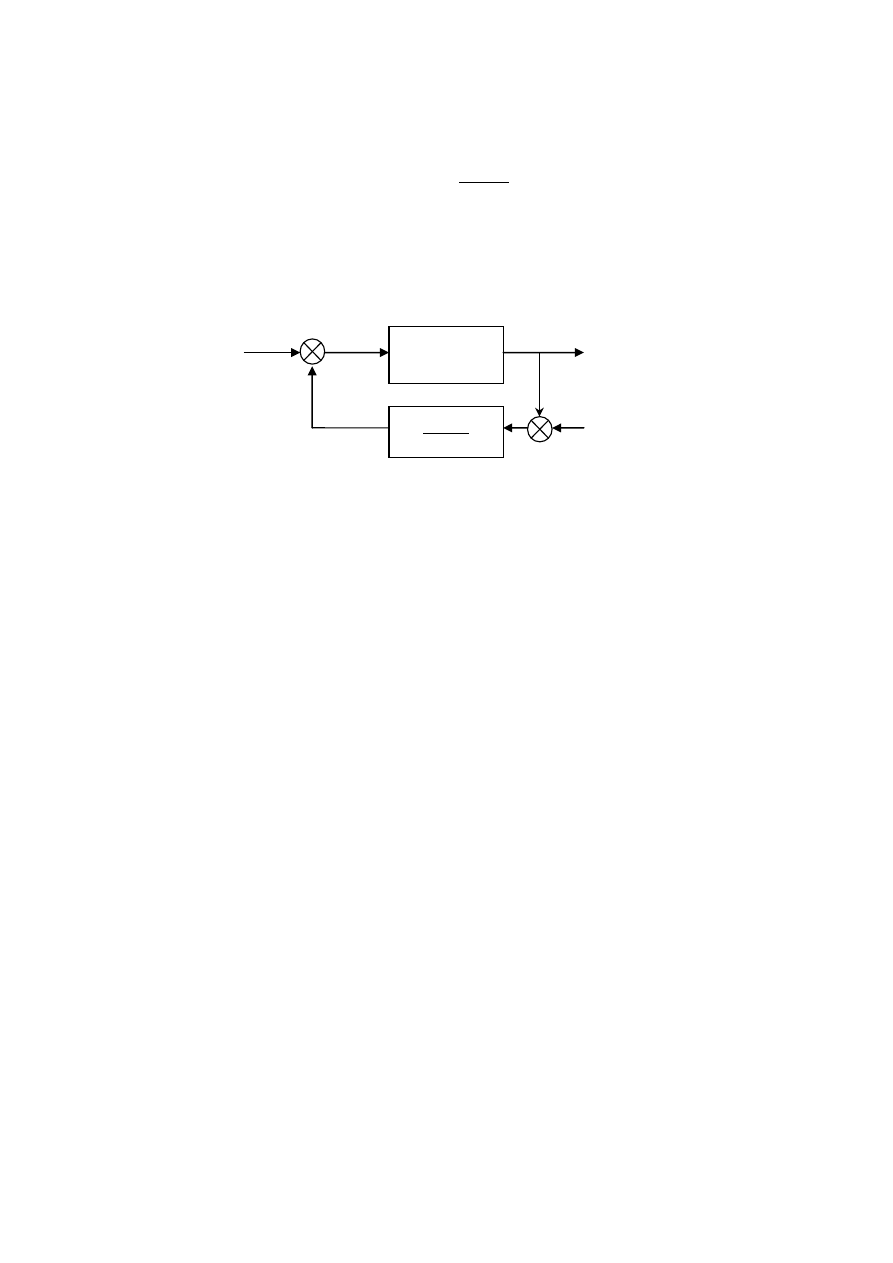
2. Wyznaczyć transmitancję zastępczą i określić własności układu względem sygnału Z:
Z(s)
Y(s)
-
Y
1
(s)
E(s) -
Y
0
(s)
3. Co to jest transmitancja widmowa, jak jest wyznaczana i jakie parametry ją opisują, podać
przykład.
4. Podać różnice między obiektami statycznymi i astatycznymi, różnice zinterpretować
graficznie na wykresie Nyquista.
5. Narysować charakterystyki regulatora z podaniem współrzędnych punktów
charakterystycznych o parametrach k
p
=3, T
i
=3
a) Charakterystyka skokowa
b) Charakterystyka Nyguista
c) Charakterystyka Bodego
6. Przedstawić kryterium stabilności Nyquista, ocenić je w porównaniu do kryterium Hurwitza,
odpowiedź przedstawić graficznie na wykresie Bodego.
7. Jak wzmocnienie k
p
regulatora wpływa na czas regulacji t
r
układu regulacji.
8. Przedstawić równania kryterialne oraz wykres Bodego, które uwzględniają podane
parametry:
a) ΔM=0.65 ,
b) Δϕ=45 ̊
1200
3𝑠
5𝑠 + 1
Egzamin poprawkowy 2 z Automatyki i Robotyki
16.02.2011
1. Narysować charakterystyki elementu z podaniem współrzędnych punktów
charakterystycznych o transmitancji 𝐺(𝑠) =
5
𝑠(𝑠+3)
a) Charakterystyka skokowa
b) Charakterystyka impulsowa
c) Charakterystyka Nyguista
d) Charakterystyka Bodego
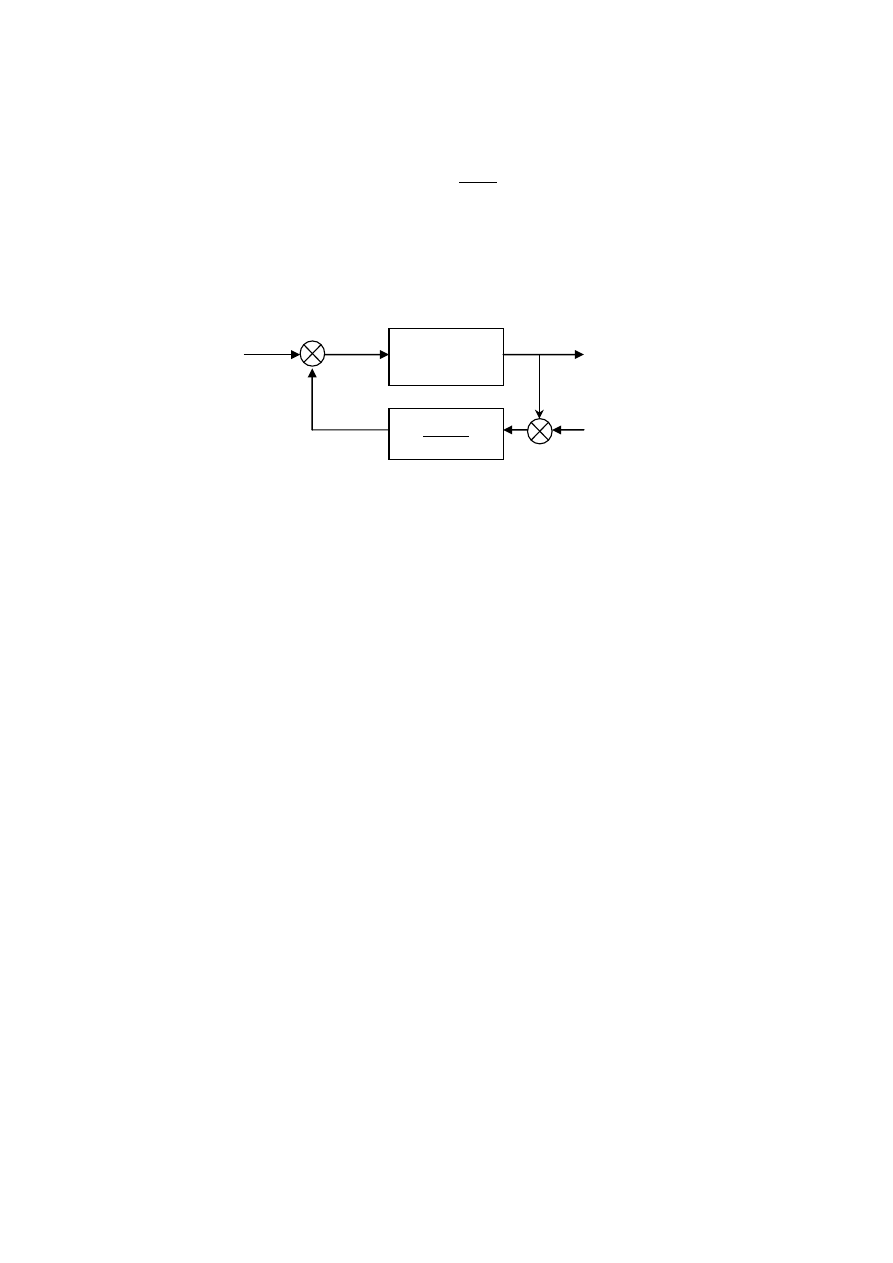
2. Wyznaczyć transmitancję zastępczą i określić własności układu względem sygnału Z:
Z(s)
Y(s)
-
Y
1
(s)
E(s) -
Y
0
(s)
3. Przedstawić różnice w odpowiedzi skokowej elementu inercyjnego pierwszego rzędu i
różniczkującego rzeczywistego.
4. Podać aproksymację obiektu statycznego i astatycznego wyższego rzędu oraz transmitancje
zastępcze.
5. Narysować charakterystyki regulatora z podaniem współrzędnych punktów
charakterystycznych o parametrach k
p
=3, T
i
=3, T
d
=0.5 , T=0.1
d) Charakterystyka skokowa
e) Charakterystyka Nyguista
f) Charakterystyka Bodego
6. Opisać parametry oceny jakości regulacji związane z charakterystyką częstotliwościową
Nyquista i Bodego.
7. Jak stała całkowania T
i
regulatora wpływa na czas regulacji t
r
układu regulacji oraz stabilność.
8. Przedstawić równania kryterialne oraz wykres Bodego, które uwzględniają podane
parametry:
c) ΔL=6dB ,
d) Δϕ=60 ̊
800
5
3𝑠 + 1
Wyszukiwarka
Podobne podstrony:
Automatyka i Robotyka EGZ dla EIP
Automatyka i Robotyka EGZ
Automatyka i Robotyka EGZ
Automatyka i Robotyka EGZ
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
tematy do egzaminu tmm, Automatyka i Robotyka studia, 2rok, Teoria mech i masz, Ćwiczenia + egzamin,
Deklaracja wyboru specjalności dla kierunku Automatyka i Robotyka, Uniwersytety - Nauka
automatyka i robotyka 12 12 1
Pomiary Automatyka Robotyka 12 Nieznany
Maszynoznawstwo ogolne, Automatyka i Robotyka, Semestr 1, Maszynoznastwo, kolos, ściągi
Zagad NE09, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elekt
opracowanie2, Automatyka i robotyka
automat tokarski, Automatyka i Robotyka, Semestr 5, ZMiSW, kolos lab
ZAGADNIENIA DO EGZ. Dla Stomatologów, III rok, pediatria
CLAB 1 2010-2011, Automatyka i Robotyka, Język programowania
sprawozdanie automatyka2, studia, V semestr, Automatyka i robotyka, sprawko automaty stabilność
więcej podobnych podstron