Elementy liniowe układów automatyki
Elementy inercyjne wy szych rz dów
ELEMENTY INERCYJNE WY SZYCH RZ DÓW
W układach sterowania bardzo cz sto wyst puj elementy proporcjonalne
opisywane równaniami ró niczkowymi wy szego rz du.
t
k
0
X
t
k
0
1
2
3
Y
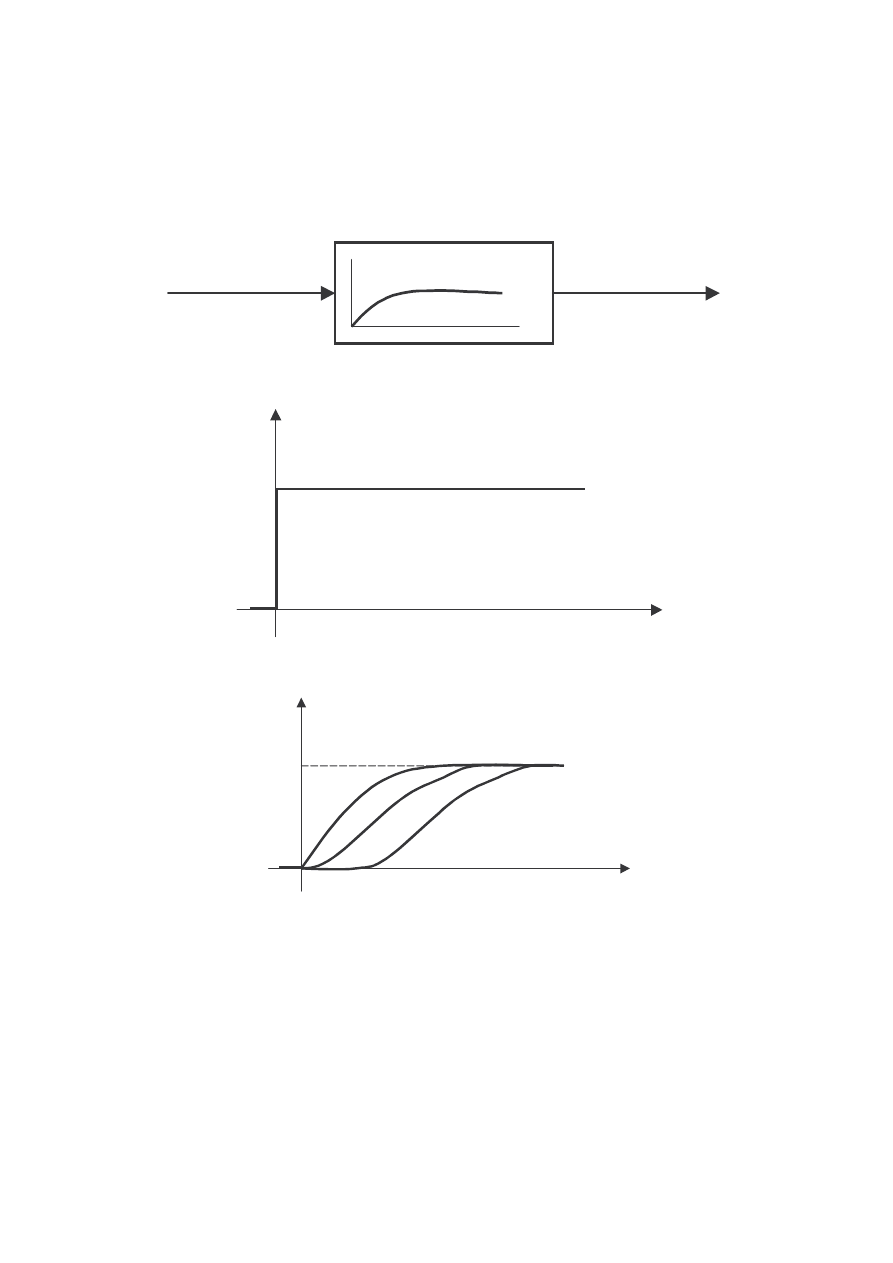
Odpowied skokowa elementu wieloinercyjnego:
a) symbol elementu wieloinercyjnego; b) wymuszenie skokowe;
c) odpowied na wymuszenie skokowe elementu: 1 - jednoinercyjnego, 2 -
oscylacyjnego tłumionego krytycznie, 3 - wieloinercyjnego
Elementy liniowe układów automatyki
Elementy inercyjne wy szych rz dów
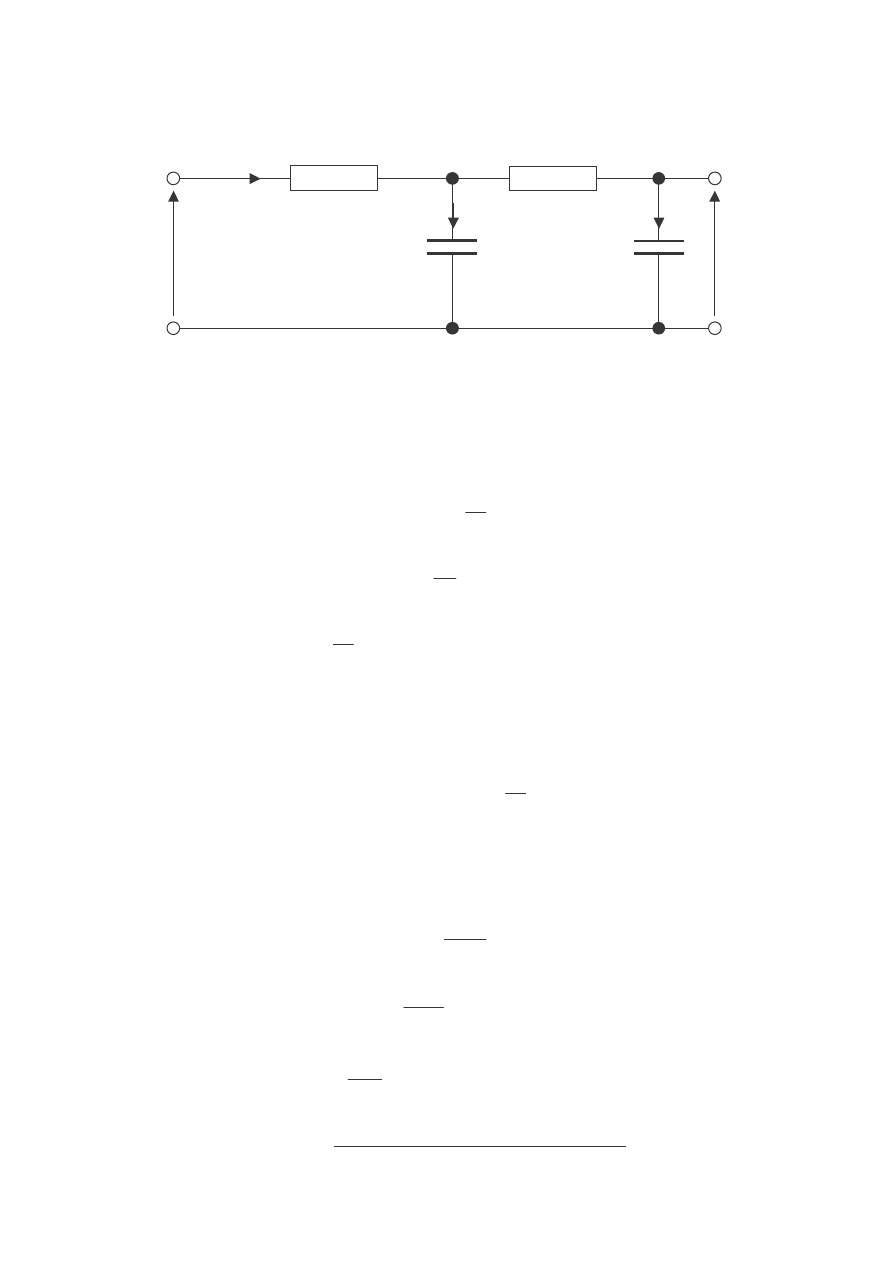
Czwórnik RC
C
1
U
we
(t)
U
wy
(t)
C
2
R
1
R
2
I(t)
I
1
(t)
I
2
(t)
Czwórnik RC
Dla nieobci onego czwórnika RC (przy zerowych warunkach pocz tkowych)
otrzymuje si równanie:
τ
τ
+
=
t
0
1
1
1
we
d
)
(
I
C
1
R
)
t
(
I
)
t
(
U
;
τ
τ
=
t
0
2
2
wy
d
)
(
I
C
1
)
t
(
U
;
)
t
(
I
R
)
t
(
U
d
)
(
I
C
1
2
2
wy
t
0
1
1
+
=
τ
τ
;
)
t
(
I
)
t
(
I
)
t
(
I
2
1
+
=
Po wyeliminowaniu pr du I(t) znajdujemy:
+
+
=
t
0
1
1
1
2
1
1
we
dt
)
t
(
I
C
1
R
)
t
(
I
R
)
t
(
I
)
t
(
U
;
W celu wyznaczenia transmitancji rozwa anego czwórnika wykonujemy
transformacj Laplace'a równa - przy zerowych warunkach pocz tkowych:
0
sC
)
s
(
I
)
t
(
U
2
2
wy
=
−
;
0
)
s
(
I
R
sC
)
s
(
I
)
s
(
U
2
2
1
1
wy
=
+
−
;
)
s
(
U
)
s
(
I
R
)
s
(
I
sC
1
R
we
2
1
1
2
1
=
+
+
;
1
s
)]
R
R
(
C
R
C
[
s
R
R
C
C
)
s
(
U
)
s
(
U
2
1
2
1
1
2
2
1
2
1
we
wy
+
+
+
+
=
Elementy liniowe układów automatyki
Elementy inercyjne wy szych rz dów
Po wprowadzeniu oznacze :
1
1
1
C
R
T
=
;
1
1
1
C
R
T
=
otrzymujemy
1
s
T
R
R
R
T
s
T
T
1
)
s
(
U
)
s
(
U
)
s
(
G
2
2
2
1
1
2
2
1
we
wy
+
+
+
+
=
=
Pierwiastki równania s rzeczywiste, poniewa :
=
−
+
+
=
−
+
+
2
1
2
2
2
1
2
1
2
1
2
2
2
2
1
1
T
T
4
T
R
R
T
T
T
T
4
T
R
R
R
T
=
−
+
+
+
+
=
2
1
2
2
2
1
2
1
2
2
1
2
2
1
T
T
4
T
R
R
R
R
T
)
T
T
(
2
)
T
T
(
0
T
R
R
R
R
T
)
T
T
(
2
)
T
T
(
2
2
2
1
2
1
2
2
1
2
2
1
>
+
+
+
+
=
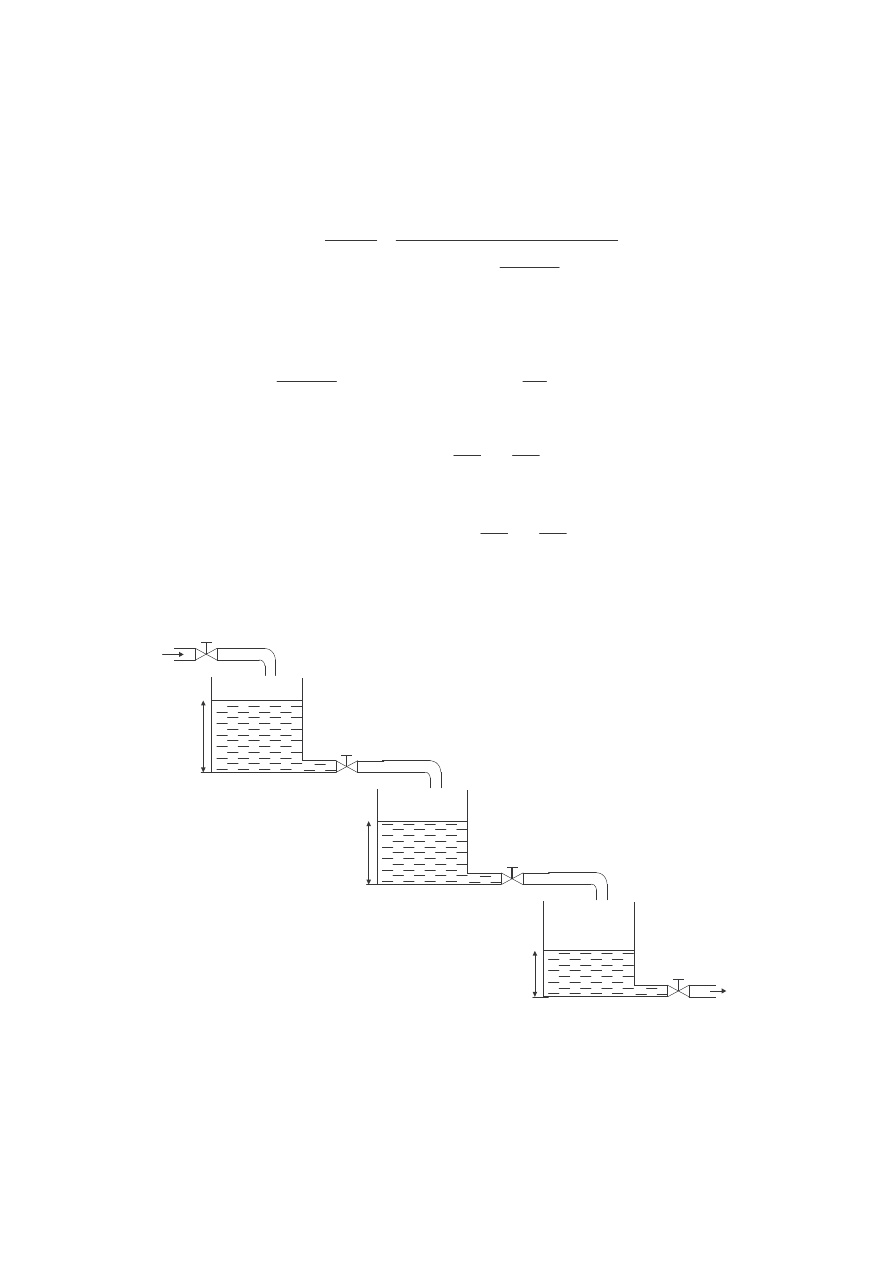
Układ trzech zbiorników poł czonych szeregowo
h
1
Q
1
Q
x
h
2
Q
2
h
3
Q
3
Układ trzech zbiorników poł czonych szeregowo
Wyszukiwarka
Podobne podstrony:
05 2 inercyjny
06-05 PAM- Dostęp do żywego światła w świetlnych miastach w wyższych wymiarach, CAŁE MNÓSTWO TEKSTU
05 El inercyjne, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Automatyka,
podrecznik 2 18 03 05
regul praw stan wyjątk 05
05 Badanie diagnostyczneid 5649 ppt
Podstawy zarządzania wykład rozdział 05
05 Odwzorowanie podstawowych obiektów rysunkowych
05 Instrukcje warunkoweid 5533 ppt
05 K5Z7
05 GEOLOGIA jezior iatr morza
05 IG 4id 5703 ppt
05 xml domid 5979 ppt
Świecie 14 05 2005
Wykł 05 Ruch drgający
więcej podobnych podstron