1
PARAMETRY SYGNAŁÓW
Wartość maksymalna sygnału
m
X
jest to największa wartość chwilowa jaką sygnał osiąga w
okresie zmienności.
Wartość średnia - średnia arytmetyczna tego sygnału obliczona za jeden okres.
dt
t
x
T
x
T
śr
∫
=
0
)
(
1
Wartość skuteczna
[ ]
dt
t
x
T
x
T
k
s
∫
=
0
2
)
(
1
Współczynnik szczytu
sk
m
s
x
x
k
=
Współczynnik kształtu
śr
sk
k
x
x
k
=
Współczynnik wypełnienia
m
śr
w
x
x
k
=
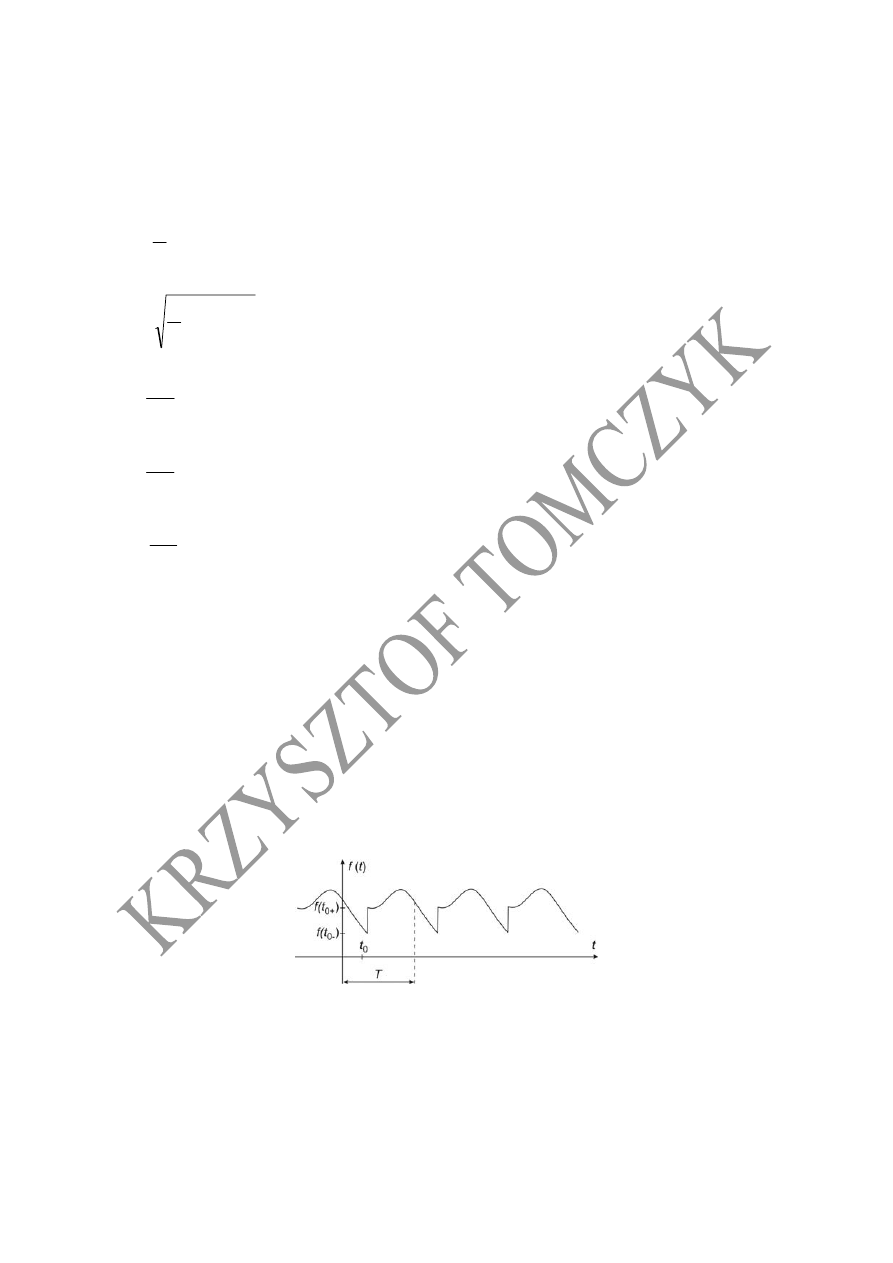
Częstotliwościowa analiza sygnałów odkształconych
Każdą funkcję okresową
),
(t
f
która spełnia warunki Dirichleta można przedstawić w
postaci szeregu Fouriera, składającego się ze składowej stałej i sumy funkcji
trygonometrycznych o pulsacjach
.
...,
,
3
,
2
,
1
1
1
1
ω
ω
ω
ω
n
Z warunków Dirichleta wynika, że każdy przedział o czasie trwania T można podzielić na
określoną liczbę podprzedziałów, w których funkcja
)
(t
f
jest monotoniczna i ciągła, a w
każdym punkcie nieciągłości istnieją granice: lewostronna
)
(
0
−
t
f
i prawostronna
)
(
0
+
t
f
o
skończonych wartościach.
Przykład funkcji okresowej spełniającej warunki Dirichleta
2
Trygonometryczny szereg Fouriera
Szereg Fouriera w postaci trygonometrycznej wyraża się wzorem
[
]
∑
+
+
=
∞
=1
1
1
)
sin(
)
cos(
2
)
(
n
n
n
t
n
b
t
n
a
A
t
f
ω
ω
gdzie:
,
)
cos(
)
(
2
0
1
∫
=
T
n
dt
t
n
t
f
T
M
a
ω
∫
=
T
n
dt
t
n
t
f
T
M
b
0
1
)
sin(
)
(
2
ω
2
A
- składowa stała
n
a i
n
b - amplitudy członów cosinusoidalnych i sinusoidalnych,
T
π
ω
2
1
=
- pulsacja
podstawowa,
1
ω
n
- pulsacje harmoniczne,
n
- liczba naturalna,
T - okres funkcji,
M
-
.
|
)
(
|
max
t
f
Składowa stała
2
A
określona dla
0
=
n
przedstawia wartość średnią funkcji
)
(t
f
za okres
.
T
W zależności od kształtu funkcji okresowej
)
(
t
f
szereg zawiera tylko określone składowe:
1. Jeśli funkcja ta jest parzysta, czyli
),
(
)
(
t
f
t
f
−
=
szereg Fouriera zawiera nieparzyste
cosinusoidy i składową stałą.
2. Jeśli funkcja jest nieparzysta, czyli
),
(
)
(
t
f
t
f
−
=
−
szereg Fouriera zawiera tylko sinusoidy.
3. W przypadku funkcji antysymetrycznej, czyli
),
2
(
)
(
T
t
f
t
f
+
−
=
szereg składa się z
nieparzystych sinusoid i cosinusoid.
Poniższy wzór przedstawia szereg Fouriera dla przykładowej parzystej funkcji
).
(
t
f
⎥⎦
⎤
⎢⎣
⎡
+
+
+
+
=
...
)
5
cos(
5
1
)
3
cos(
3
1
)
cos(
2
2
)
(
1
1
1
t
t
t
A
A
t
f
ω
ω
ω
π
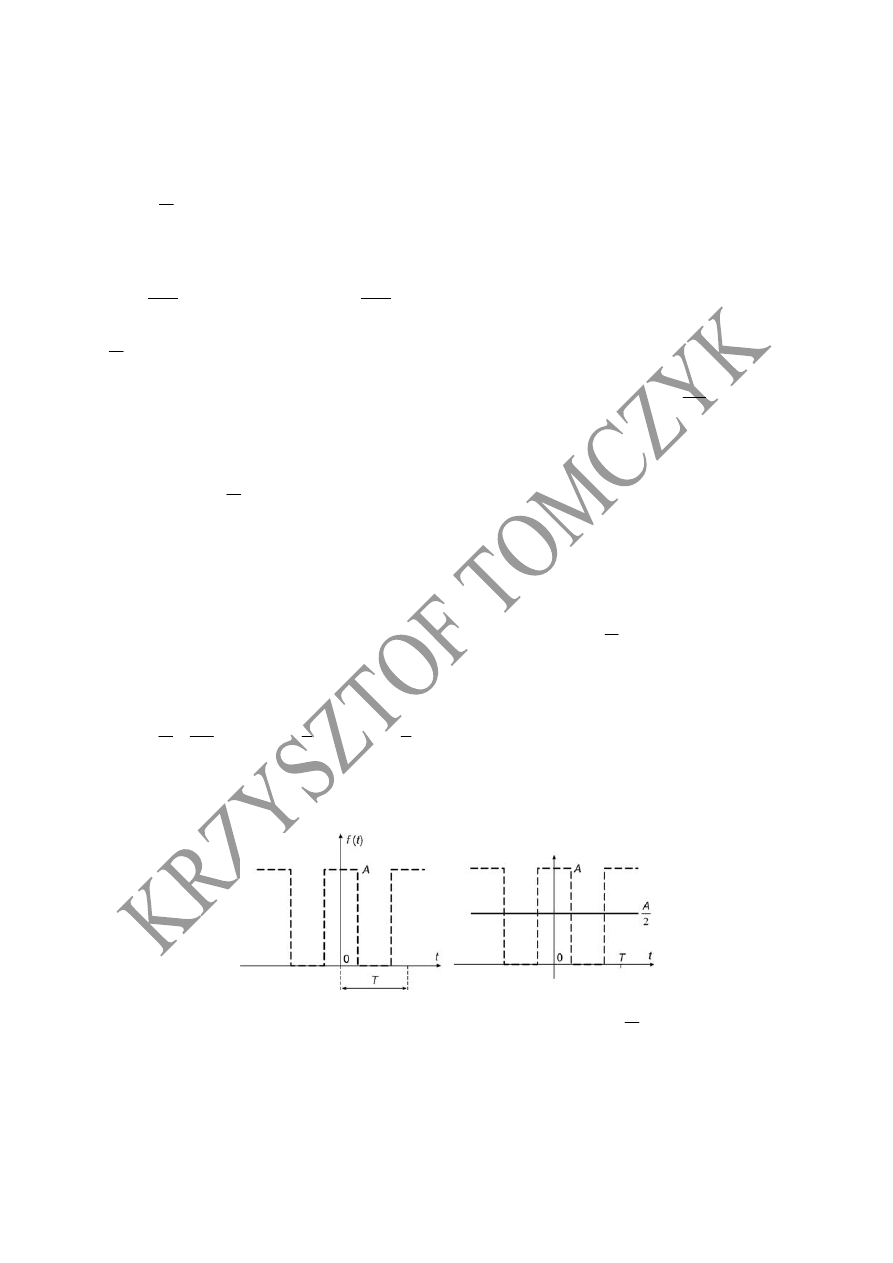
Poniższe rysunki przedstawiają parzystą funkcję
)
(t
f
i jej poszczególne składowe
harmoniczne: 1, 3, 5 oraz składową stałą.
Przykładowa funkcja parzysta
)
(t
f
oraz składowa stała
2
A
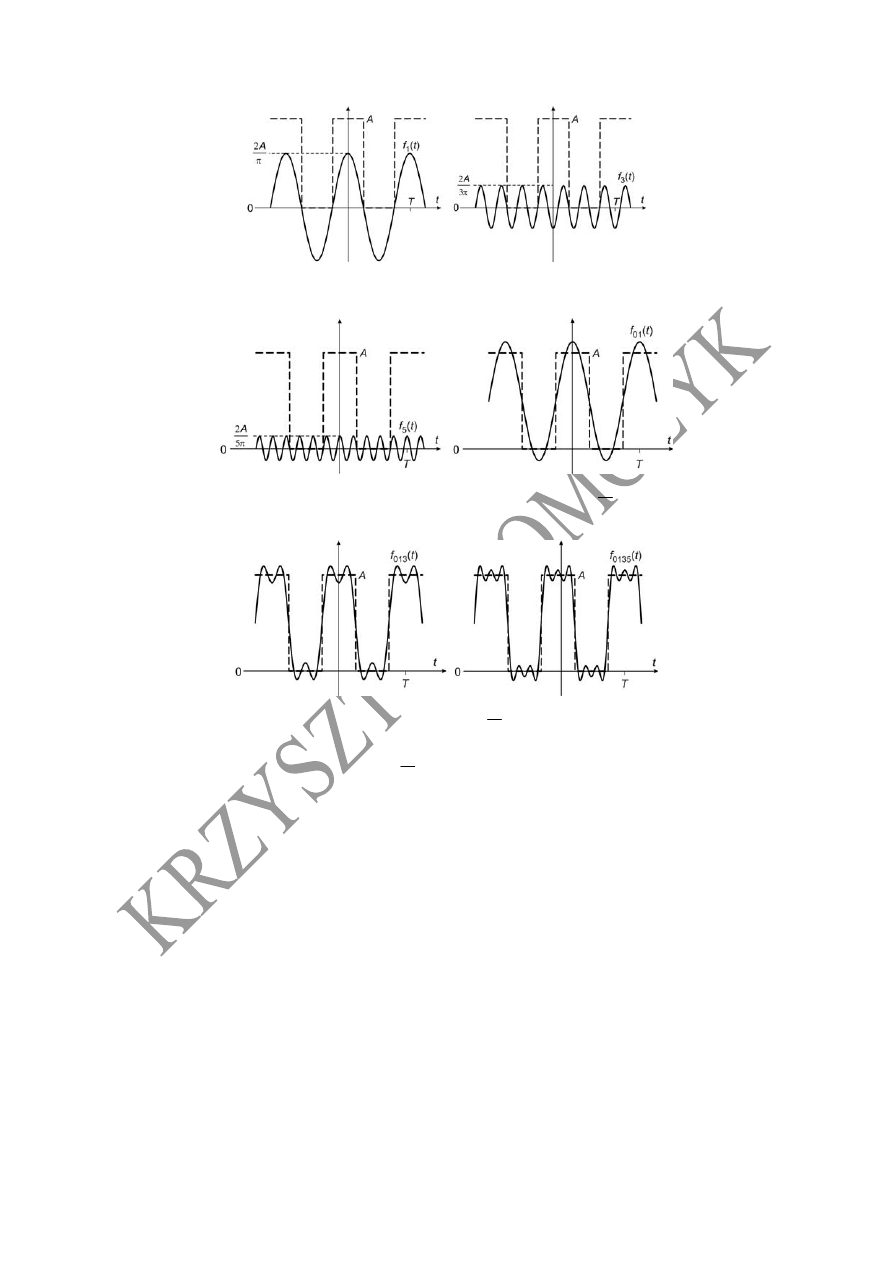
3
Funkcja
)
(t
f
oraz pierwsza i trzecia harmoniczna
)
(
1
t
f
i
)
(
3
t
f
Funkcja
)
(t
f
oraz piąta harmoniczna
)
(
5
t
f
i
)
(
2
)
(
1
01
t
f
A
t
f
+
=
Funkcja
)
(t
f
oraz
)
(
)
(
2
)
(
3
1
013
t
f
t
f
A
t
f
+
+
=
i
)
(
)
(
)
(
2
)
(
5
3
1
0135
t
f
t
f
t
f
A
t
f
+
+
+
=
4
KLASYFIKACJA SYGNAŁÓW
Sygnały harmoniczne
Są to sygnały typu
)
sin(
)
(
0
ϕ
ω
+
⋅
=
t
U
t
u
gdzie U jest amplitudą a
ϕ
początkową fazą sygnału.
Widmem sygnału harmonicznego jest jeden prążek, który na osi
ω znajduje się w punkcie
.
0
ω
Sygnały okresowe
Sygnały okresowe powtarzają swoje wartości w jednakowych przedziałach czasu
p
T
, czyli
spełniają warunek
)
(
)
(
p
T
n
t
u
t
u
⋅
±
=
dla
..
.
,
3
,
2
,
1
±
±
±
=
n
Sygnały poliharmoniczne
Są to sygnały składające się z nieskończonej liczby składowych sinusoidalnych o amplitudach
n
U i fazach
n
ϕ
∑
+
⋅
=
∞
=
1
)
sin(
)
(
n
n
n
n
t
U
t
u
ϕ
ω
Widmem sygnału poliharmonicznego jest n prążków o amplitudach
n
U , które na osi
ω
znajdują się w punktach
n
ω
.
Sygnał poliharmoniczny jest sygnałem okresowym jeżeli stosunki wszystkich zawartych w
nim par pulsacji wyrażają się liczbami wymiernymi
wymierna
liczba
m
n
⇒
ω
ω
Sygnały prawie okresowe
Jeżeli nie wszystkie stosunki par pulsacji w sygnale poliharmonicznym wyrażają się liczbami
wymiernymi
a
niewymiern
liczba
m
n
⇒
ω
ω
to sygnał jest sygnałem prawie okresowym.
Nieustalone sygnały przejściowe
Do sygnałów nieustalonych zaliczamy sygnały, które mogą być opisane funkcjami czasu, a
które nie należą do sygnałów okresowych i lub sygnałów prawie okresowych. Przejściowe
sygnały nieustalone w przeciwieństwie do sygnałów okresowych i prawie okresowych nie
mają widma dyskretnego. Mają natomiast widmo ciągłe określane za pomocą transformaty
Fouriera.
∫
⋅
=
∞
∞
−
−
dt
e
t
u
U
t
j
ω
ω
)
(
)
(
przy czym z założenia dla tych sygnałów zachodzi
5
∞
±
→
=
t
dla
t
u
0
)
(
CHARAKTERYSTYKA SYGNAŁÓW
Sygnały charakteryzuje się za pomocą dokonywanych na nich określonych relacji
matematycznych do których najczęściej zaliczamy: wartość średnią, średnią kwadratową,
wariancję, odchylenie standardowe oraz funkcję korelacji własnej nazywanej autokorelacji i
korelacji wzajemnej.
wartość średnia
∫
=
∞
→
−
T
T
u
dt
t
u
T
t
0
)
(
1
lim
)
(
μ
a gdy sygnał jest próbkowany z szerokością próbki
Δ sekund wtedy
Δ
⋅
∑
Δ
Δ
⋅
=
=
−
N
n
u
n
u
N
1
)
(
1
μ
czyli
∑
Δ
=
=
−
N
n
u
n
u
N
1
)
(
1
μ
wartość średnia kwadratowa
∫
=
Ψ
→∞
T
T
u
dt
t
u
T
t
0
2
2
)
(
1
lim
)
(
oraz
∑
Δ
=
Ψ
=
N
n
u
n
u
N
1
2
2
)
(
1
wariancja
∫
−
=
−
∞
→
T
u
T
u
dt
t
u
T
t
0
2
2
]
)
(
[
1
lim
)
(
μ
σ
oraz
2
1
2
]
)
(
[
1
−
=
−
∑
Δ
=
u
N
n
u
n
u
N
μ
σ
odchylenie standardowe jako pierwiastek kwadratowy z wariancji
∫
−
=
−
∞
→
T
u
T
u
dt
t
u
T
0
2
]
)
(
[
1
lim
μ
σ
i
2
1
]
)
(
[
1
−
=
−
∑
Δ
=
u
N
n
u
n
u
N
μ
σ
6
autokorelacja
∫
+
=
∞
→
T
T
uu
dt
t
u
t
u
T
R
0
)
(
)
(
1
lim
)
(
τ
τ
oraz
⎥⎦
⎤
⎢⎣
⎡ ∑
+
Δ
Δ
=
=
∞
→
N
n
N
uu
n
u
n
u
N
R
1
)
(
)
(
1
lim
)
(
τ
τ
Funkcja autokorelacji
)
(
τ
uu
R
charakteryzuje zależność sygnału )
(t
u
poprzez uśrednianie w
przedziale T jego iloczynu chwilach t i
.
τ
+
t
Autokorelacja )
(
τ
uu
R
jest funkcją rzeczywistą i parzystą z maksimum dla
0
=
τ
)
(
)
(
τ
τ
uu
uu
R
R
=
−
Łatwo zauważyć, że dla zerowego przesunięcia
τ autokorelacja
)
0
(
uu
R
jest równa
2
u
Ψ
)
0
(
2
uu
u
R
=
Ψ
natomiast dla
∞
→
T
jej kwadratowy pierwiastek przedstawia wartość średnią
u
μ
)
(
∞
=
uu
u
R
μ
Przykład
)
sin(
)
(
θ
ω
+
=
t
U
t
u
)
cos(
2
]
2
2
cos(
)
[cos(
2
1
2
lim
)
sin(
)
sin(
2
1
lim
)
(
)
(
2
1
lim
)
(
)
(
1
lim
)
(
2
2
2
0
ωτ
θ
ωτ
ω
ωτ
θ
ωτ
ω
θ
ω
τ
τ
τ
U
dt
t
T
U
dt
t
t
U
T
dt
t
u
t
u
T
dt
t
u
t
u
T
R
T
T
T
T
T
T
T
T
T
T
T
uu
=
∫
+
+
−
=
∫
+
+
⋅
+
⋅
∫
+
⋅
=
∫
+
⋅
=
−
∞
→
−
∞
→
−
∞
→
∞
→
korelacja wzajemna
)
(
τ
uy
R
charakteryzuje wzajemność zależność jednego sygnału )
(
t
u
od
wartości drugiego sygnału )
(
t
y
∫
+
=
∞
→
T
T
uy
dt
t
y
t
u
T
R
0
)
(
)
(
1
lim
)
(
τ
τ
Jeżeli
0
)
(
=
τ
uy
R
to mówimy, że sygnały
)
(t
u
i
)
(t
y
są nie są skorelowane.
Korelacja wzajemna
)
(
τ
uy
R
może być zarówno dodatnia jak i ujemna, nie musi mieć
maksimum dla
0
=
τ
i nie musi być funkcją parzystą.
7
Warto zaznaczyć, że dla sygnałów przejściowych funkcje korelacji
)
(
τ
uu
R
i
)
(
τ
uy
R
nie są
dzielone przez T i oblicza się je z następujących wzorów
∫
+
=
T
uu
dt
t
u
t
u
R
0
)
(
)
(
)
(
τ
τ
∫
+
=
T
uy
dt
t
y
t
u
R
0
)
(
)
(
)
(
τ
τ
METODY POMIAROWE
Techniczne metody pomiaru rezystancji
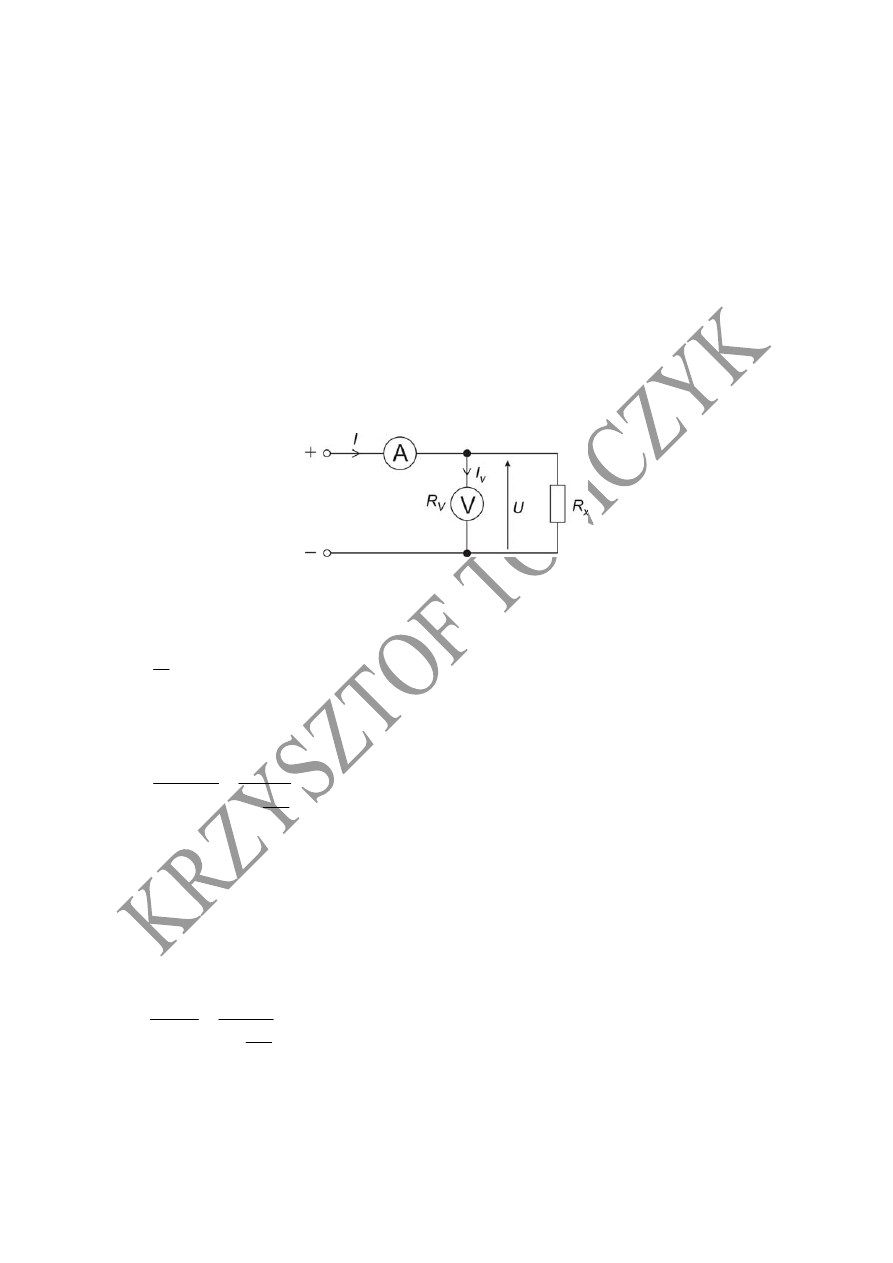
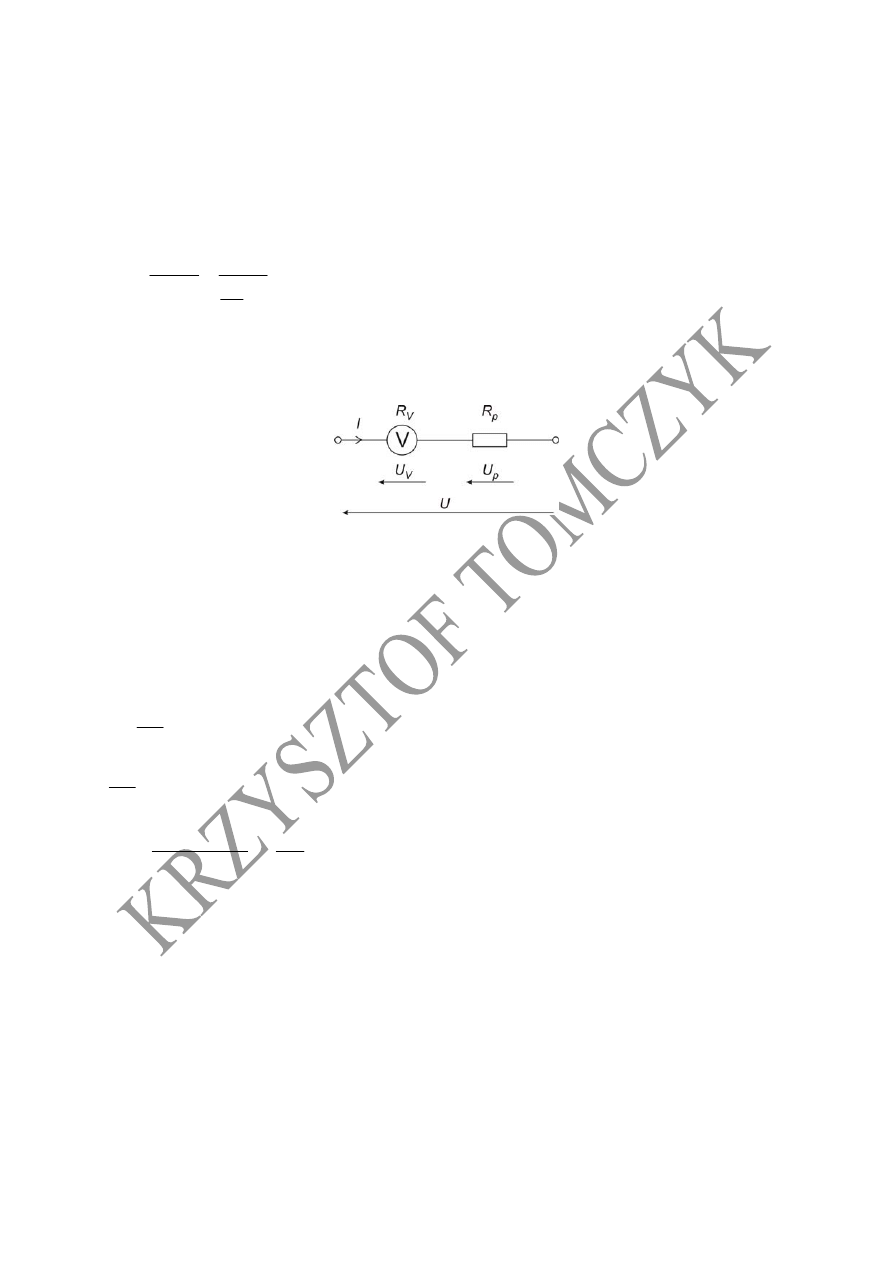
1. Metoda poprawnie mierzonego napięcia - pomiar małych rezystancji
Schemat układu
poprawnie mierzonego
napięcia
Wartość rezystancji mierzonej, wynikająca ze wskazań woltomierza i amperomierza
I
U
R
m
=
odpowiada rezystancji wypadkowej równoległego połączenia rezystancji wewnętrznej
woltomierza
V
R i rezystancji
x
R
x
V
V
V
x
v
x
m
R
R
R
R
R
R
R
R
+
=
+
=
1
W powyższej metodzie występuje błąd spowodowany prądem
V
I pobieranym przez
woltomierz.
Różnica pomiędzy wartością mierzoną
m
R i rzeczywistą
x
R stanowi systematyczny błąd
metody.
Chcąc wyznaczyć wartość
x
R w sposób prawidłowy należy skorygować wartości
wskazywane przez przyrządy
V
V
x
R
U
I
U
I
I
U
R
−
=
−
=
Bezwzględny błąd metody pomiarowej wynosi
8
x
x
V
V
x
m
x
R
R
R
R
R
R
R
−
+
=
−
=
1
Δ
Błąd względny pomiaru
%
100
1
1
%
100
1
%
100
x
V
x
x
x
V
V
x
x
Rx
R
R
R
R
R
R
R
R
R
+
−
=
−
+
=
=
Δ
δ
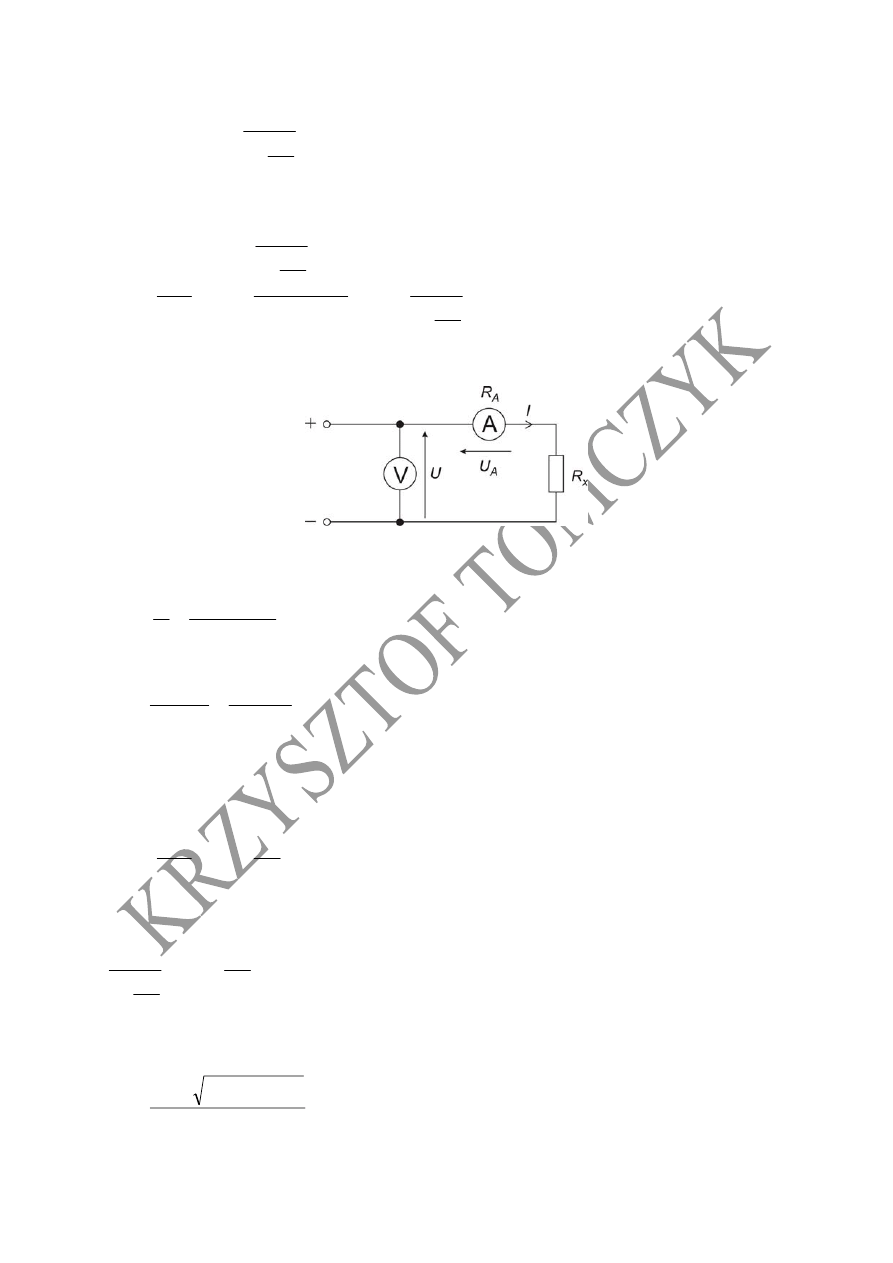
2. Metoda poprawnie mierzonego prądu - pomiar dużych rezystancji
Schemat układu
poprawnie mierzonego prądu
Wartość rezystancji wynikająca ze wskazań przyrządów wynosi
A
x
A
x
m
R
R
I
R
R
I
I
U
R
+
=
+
=
=
)
(
Korygując wskazania przyrządów pomiarowych mamy
I
IR
U
I
U
U
R
A
A
x
−
=
−
=
Błąd bezwzględny metody
A
x
A
x
x
m
x
R
R
R
R
R
R
R
=
−
+
=
−
=
Δ
Błąd względny pomiaru
%
100
%
100
x
A
x
x
Rx
R
R
R
R
=
=
Δ
δ
W szczególnym przypadku błąd metody w obu układach może mieć tę samą wartość
bezwzględną
%
100
1
1
x
V
R
R
+
=
%
100
x
A
R
R
0
2
=
−
−
V
A
x
A
x
R
R
R
R
R
2
4
2
V
A
A
A
x
R
R
R
R
R
+
+
=
9
Dla
V
A
R
R
<<
V
A
x
R
R
R
≈
metody poprawnie mierzonego napięcia i prądu są równoważne.
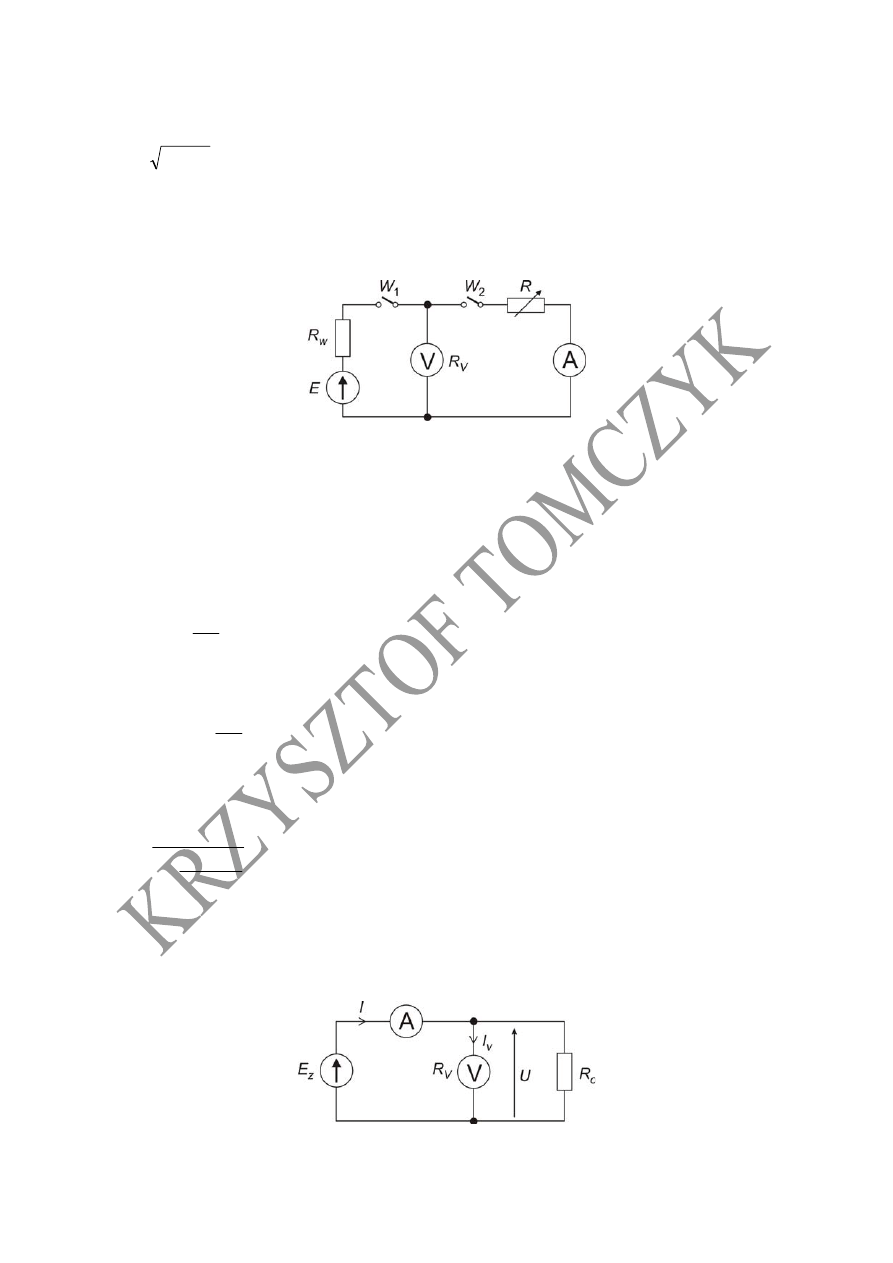
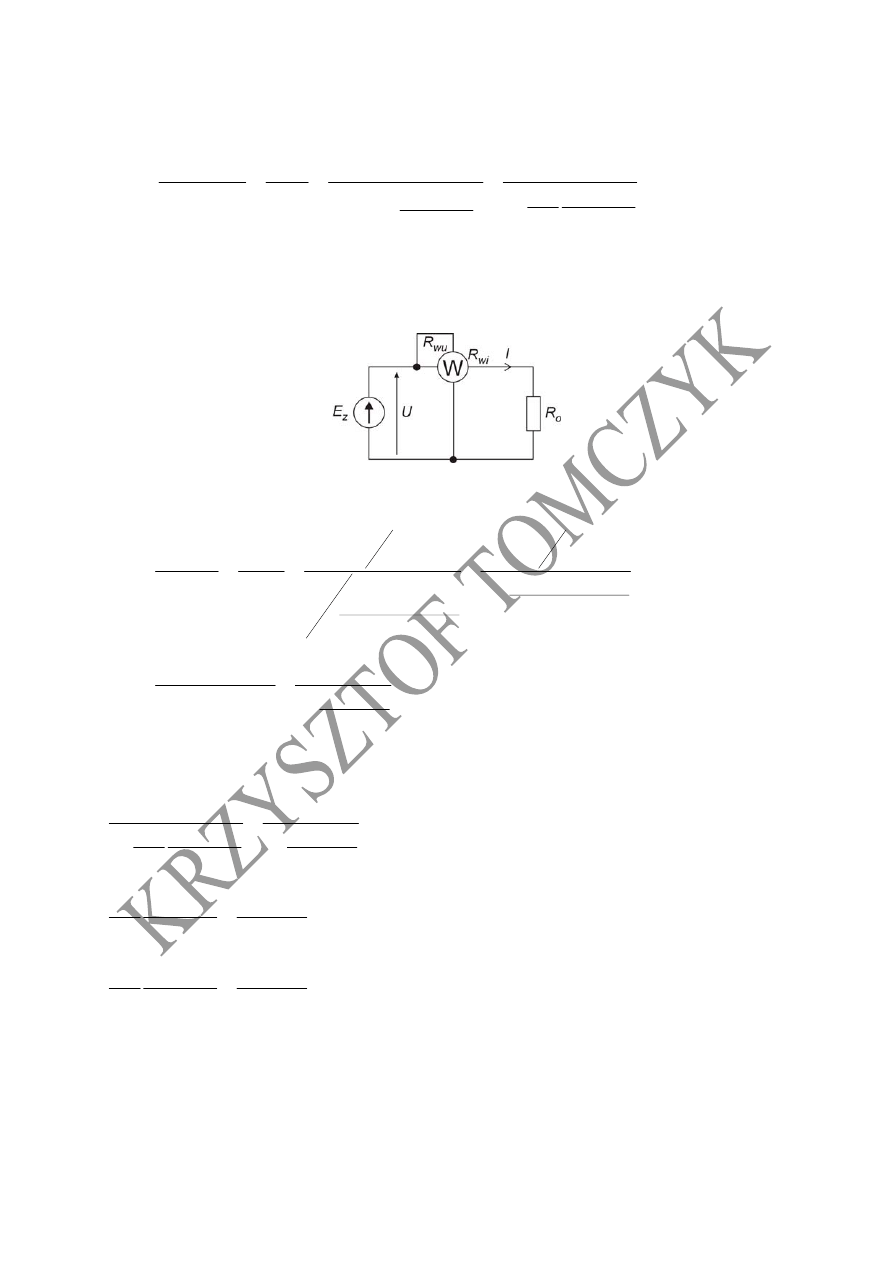
Pomiar rezystancji wewnętrznej źródła napięcia stałego
Schemat układu do pomiaru rezystancji wewnętrznej źródła napięcia stałego
Rezystancję
w
R wyznacza się poprzez dwukrotny pomiar napięcia na zaciskach źródła:
1
U
- w przypadku, gdy źródło nie jest obciążone ( zamknięty
,
1
W
otwarty
2
W
)
2
U
- w przypadku, gdy źródło obciążone jest rezystancją R ( zamknięty
1
W
i
2
W
)
Rezystancja R powinna być tak dobrana, aby uzyskać wyraźną różnicę pomiędzy
1
U
i
.
2
U
W przypadku pomiaru
1
U
obowiązuje następujące równanie
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
V
w
R
R
U
E
1
1
natomiast na podstawie pomiaru
2
U
i I
w
V
R
R
U
I
U
E
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
=
2
2
Rozwiązując powyższy układ równań uzyskuje się wzór określający wartość rezystancji
wewnętrznej źródła
V
w
R
U
U
I
U
U
R
2
1
2
1
−
−
−
=
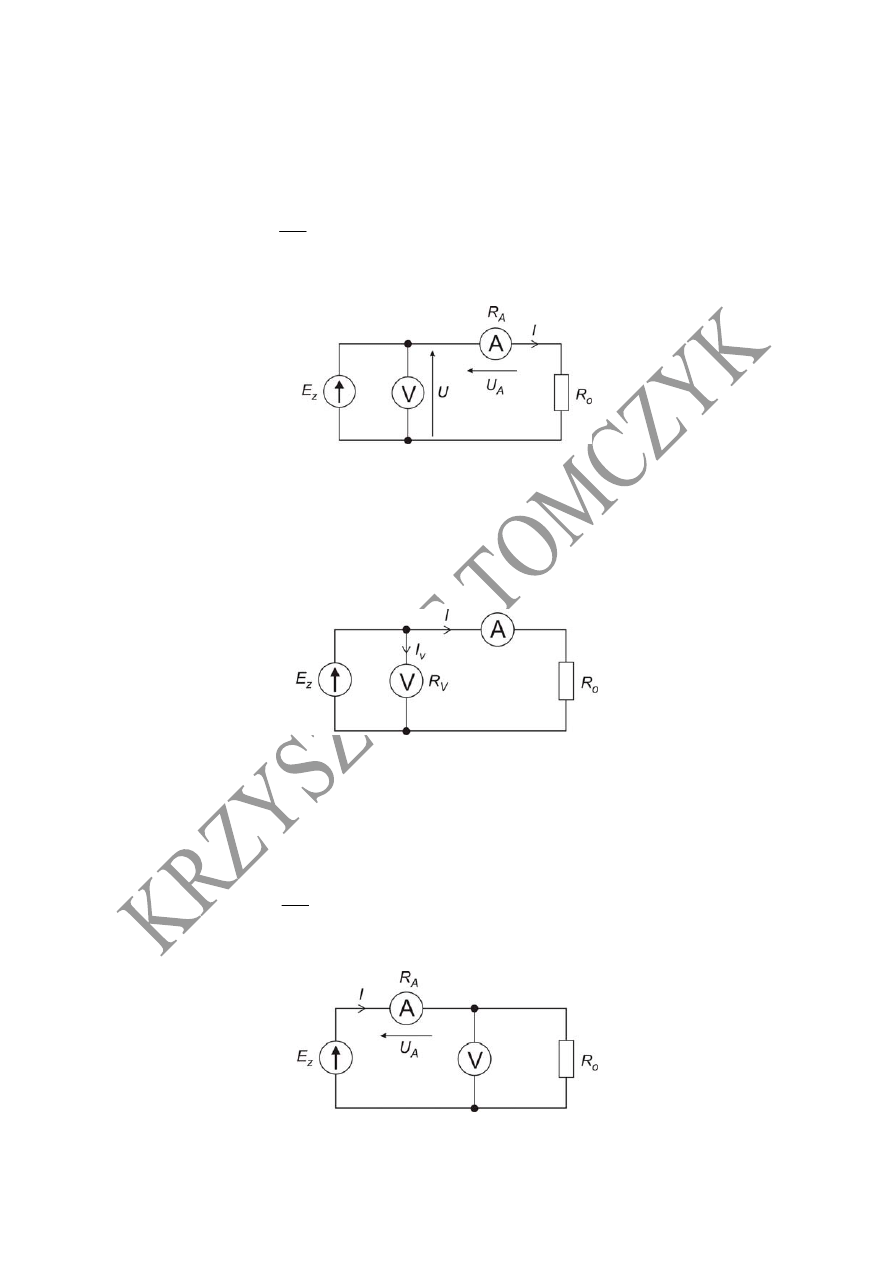
Pomiar mocy w obwodach stałoprądowych
1. Pomiar mocy odbiornika w układzie poprawnie mierzonego napięcia
Schemat układu do pomiar mocy odbiornika w układzie poprawnie mierzonego
napięcia
10
Moc wyznaczona na podstawie wskazań przyrządów
I
U
P
m
=
Korygując wskazania przyrządów mamy
(
)
V
m
V
V
o
P
P
R
U
I
U
I
I
U
P
−
=
−
=
−
=
2
2. Pomiar mocy odbiornika w układzie poprawnie mierzonego prądu
Schemat układu do pomiar mocy odbiornika w układzie poprawnie mierzonego
prądu
Po korekcie wskazań przyrządów mamy
(
)
A
m
A
A
o
P
P
R
I
I
U
I
U
U
P
−
=
−
=
−
=
2
3. Pomiar mocy źródła w układzie poprawnie mierzonego napięcia
Schemat układu do pomiar mocy źródła w układzie poprawnie mierzonego napięcia
Moc wyznaczona na podstawie wskazań przyrządów
I
U
P
m
=
Korygując wskazania przyrządów mamy
(
)
V
m
V
V
z
P
P
R
U
I
U
I
I
U
P
+
=
+
=
+
=
2
4. Pomiar mocy źródła w układzie poprawnie mierzonego prądu
Schemat układu do pomiar mocy źródła w układzie poprawnie mierzonego prądu
11
Po korekcie wskazań przyrządów mamy
(
)
A
m
A
A
z
P
P
R
I
I
U
I
U
U
P
+
=
+
=
+
=
2
Analizując błędy wyznaczenia mocy odbiornika i źródła w układzie poprawnie mierzonego
napięcia mamy:
V
o
m
o
P
P
P
P
=
−
=
Δ
V
o
m
z
P
P
P
P
−
=
−
=
Δ
V
o
V
o
V
o
o
o
R
R
Ro
U
R
U
P
P
P
P
P
=
=
=
Δ
=
2
2
δ
V
o
z
V
z
z
z
R
R
P
P
P
P
P
−
=
−
=
Δ
=
δ
Analogicznie dla układów do pomiaru mocy odbiornika i źródła w układzie poprawnie
mierzonego prądu mamy:
A
o
P
P
=
Δ
A
z
P
P
−
=
Δ
o
A
o
A
o
R
R
R
I
R
I
P
=
=
2
2
δ
o
A
z
R
R
P
−
=
δ
Analogicznie jak w przypadku technicznych pomiarów rezystancji istnieje graniczna wartość
rezystancji odbiornika (źródła) przy której błąd metody jest identyczny dla układu poprawnie
mierzonego napięcia i prądu.
Poniższa tabela przedstawia sposób wyboru układu pomiarowego w zależności od stosunku
rezystancji odbiornika (źródła) do rezystancji przyrządów pomiarowych.
Poprawny pomiar napięcia Poprawny
pomiar
prądu
Realizowany układ
pomiaru mocy
Warunek
V
A
o
R
R
R
>
V
A
o
R
R
R
<
Pomiar mocy odbiornika
V
A
o
R
R
R
=
V
A
z
R
R
R
<
V
A
z
R
R
R
>
Pomiar mocy źródła
V
A
z
R
R
R
=
12
5. Pomiar mocy odbiornika przy użyciu watomierza w układzie poprawnie mierzonego
napięcia
(
)
U
I
I
I
U
P
o
wu
+
=
⋅
=
wu
o
o
wu
R
wu
R
R
R
wu
R
R
wu
wu
R
R
R
U
R
U
P
P
P
P
P
P
P
P
P
=
=
=
−
+
=
−
=
2
2
δ
6. Pomiar mocy odbiornika przy użyciu watomierza w układzie poprawnie mierzonego prądu
(
)
o
A
R
R
I
P
+
=
2
o
wi
o
wi
R
R
wi
R
R
R
I
R
I
P
P
P
=
=
−
=
2
2
δ
Jeśli
wi
wu
δ
δ
=
to
wi
wu
o
o
wi
wu
o
R
R
R
R
R
R
R
=
⇒
=
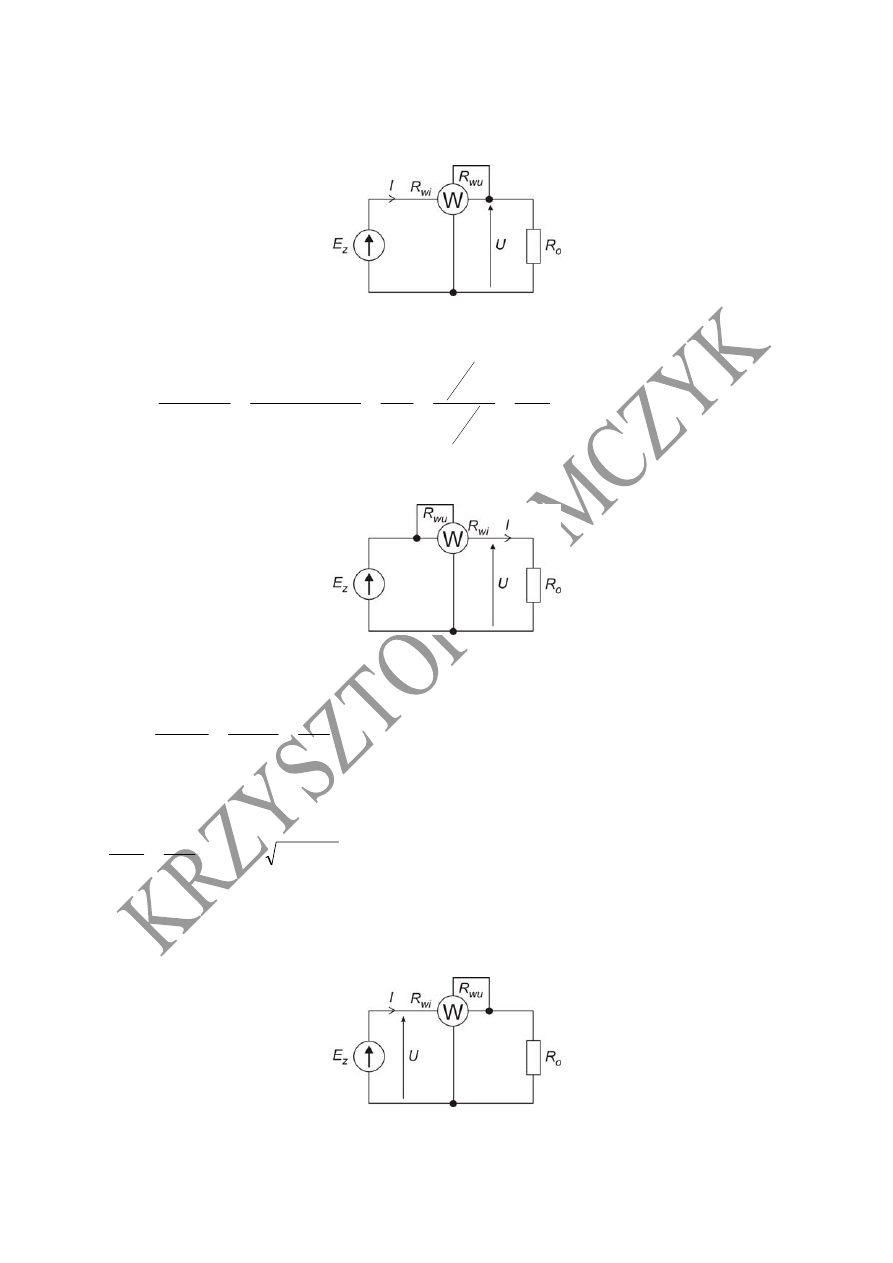
7. Pomiar mocy źródła przy użyciu watomierza w układzie poprawnie mierzonego napięcia
13
wi
R
P
P
P
+
=
wu
o
wu
o
wi
wu
o
wu
o
A
wi
R
wi
R
wi
wu
R
R
R
R
R
R
R
R
R
R
I
R
I
P
P
P
P
P
P
+
⋅
+
−
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
⋅
+
−
=
−
=
−
−
=
1
1
1
2
2
δ
8. Pomiar mocy źródła przy użyciu watomierza w układzie poprawnie mierzonego prądu
wi
R
P
P
P
+
=
)
(
)
(
2
2
2
2
wi
o
wu
wi
o
wu
wu
wi
o
wu
wi
o
wu
wu
o
R
wu
o
R
o
R
wi
R
R
R
R
R
R
U
R
U
R
R
R
R
R
R
U
R
U
P
P
P
P
P
+
+
+
=
+
+
+
=
−
=
−
=
δ
wi
o
wu
wi
o
wu
wi
o
wi
R
R
R
R
R
R
R
R
+
+
−
=
+
+
+
=
1
1
δ
Jeśli
wi
wu
δ
δ
=
to
wi
o
wu
wu
o
wu
o
wi
R
R
R
R
R
R
R
R
+
+
−
=
+
⋅
+
−
1
1
1
1
1
wi
o
wu
wu
wu
wi
R
R
R
R
R
R
R
R
+
=
+
⋅
0
0
1
wi
o
wu
wi
R
R
R
R
R
R
+
=
+
1
1
0
0
wi
wu
wi
wi
R
R
R
R
R
R
R
⋅
+
⋅
=
⋅
+
0
0
2
0
wi
wu
R
R
R
⋅
=
2
0
14
wi
wu
R
R
R
⋅
=
0
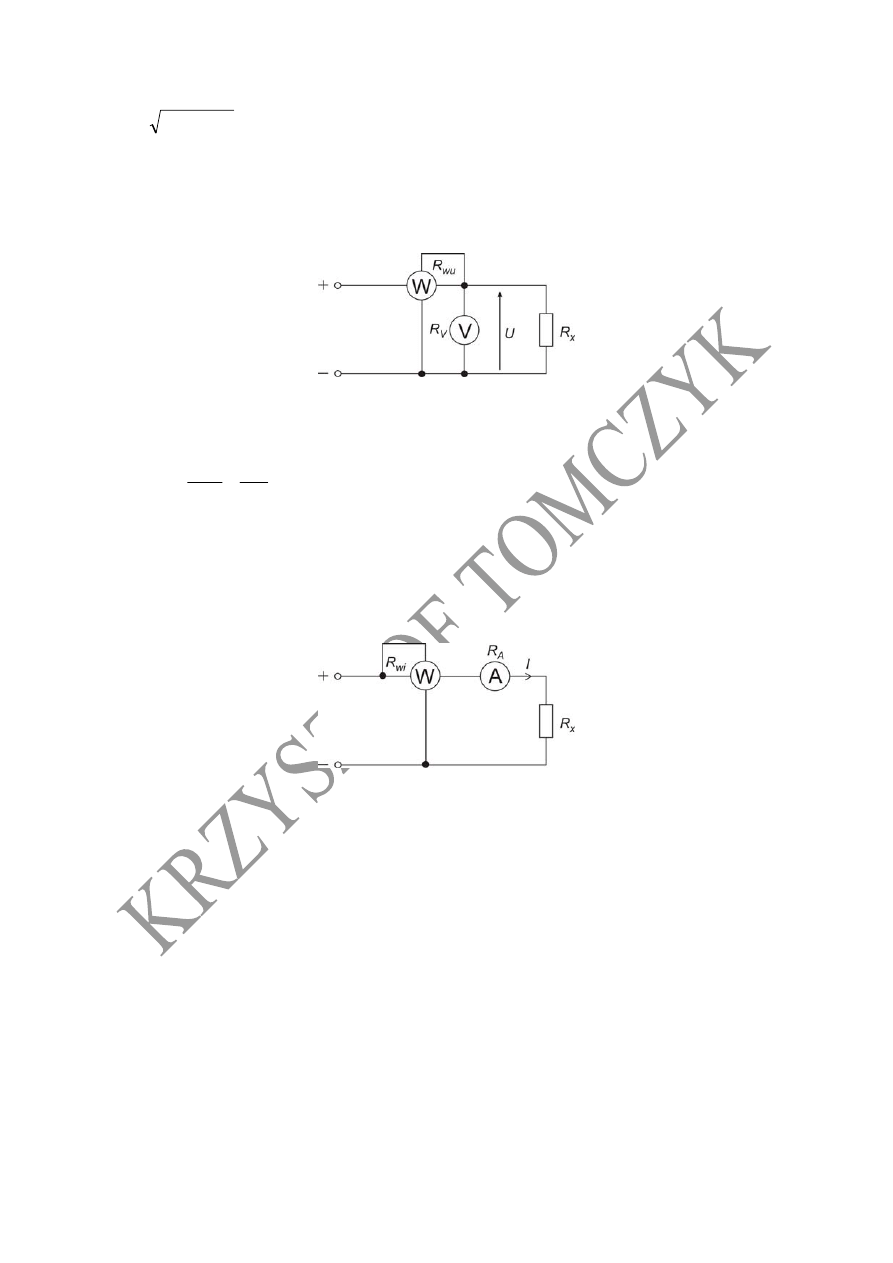
9. Pomiar mocy odbiornika
w układzie poprawnie mierzonego napięcia przy użyciu
watomierza i woltomierza
Schemat układu do pomiaru mocy w układzie poprawnie mierzonego napięcia
Moc wyznaczona na podstawie korekty wskazania watomierza
V
wu
m
x
R
U
R
U
P
P
2
2
−
−
=
m
P - moc wskazywana przez watomierz
10. Pomiar mocy odbiornika w układzie poprawnie mierzonego prądu przy użyciu
watomierza i amperomierza
Schemat układu do pomiaru mocy w układzie poprawnie mierzonego prądu
Moc wyznaczona na podstawie korekty wskazania watomierza
A
wi
m
x
R
I
R
I
P
P
2
2
−
−
=
15
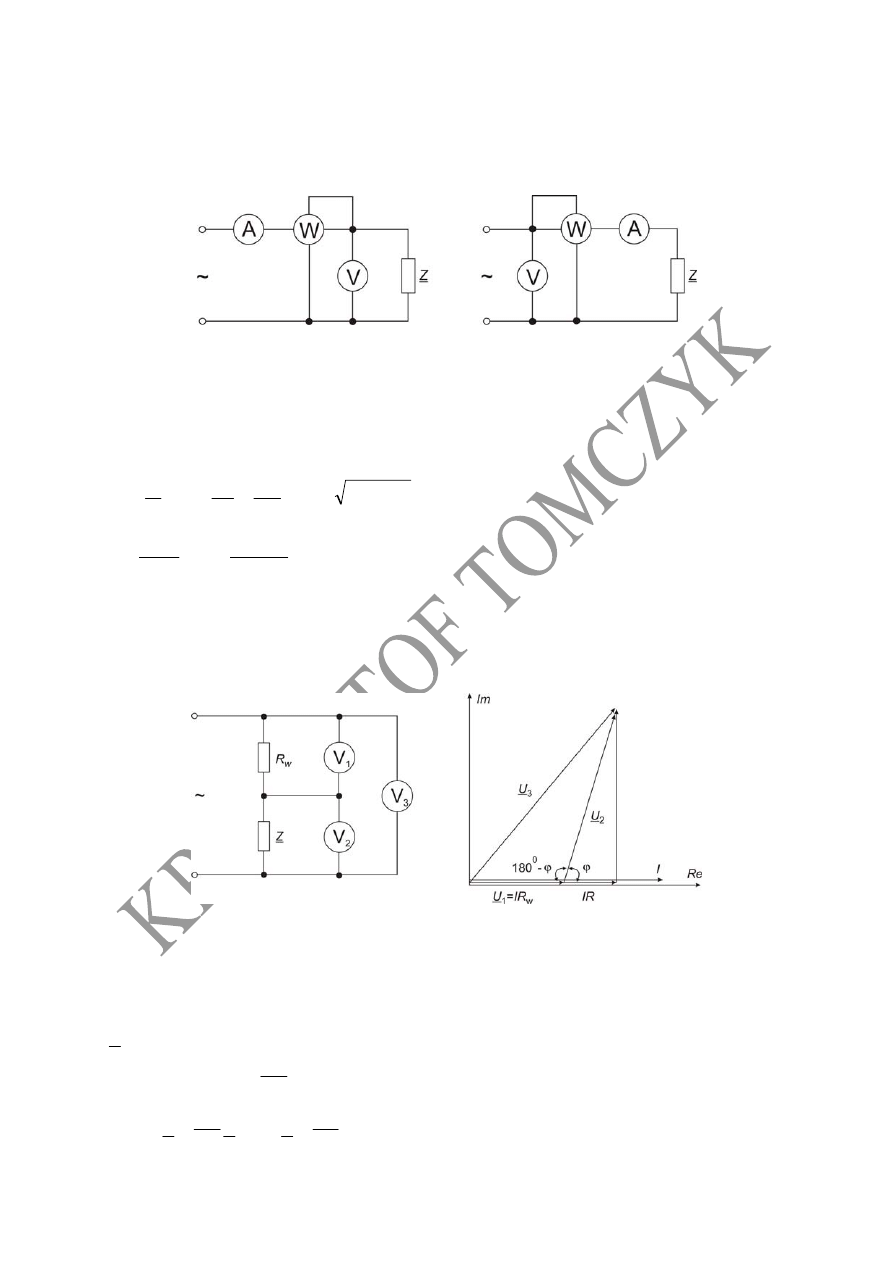
Pomiary impedancji i jej parametrów
1. Pomiar składowych impedancji za pomocą watomierza, woltomierza i amperomierza
a) b)
Schemat układów do pomiaru składowych impedancji za pomocą watomierza, woltomierza
i amperomierza
a) układ poprawnie mierzonego napięcia
b) układ poprawnie mierzonego prądu
Pomijając wpływ rezystancji wewnętrznych przyrządów parametry impedancji można
wyznaczyć w oparciu o wzory:
2
2
2
2
,
,
R
Z
X
P
U
I
P
R
I
U
Z
−
=
=
=
=
X
f
C
f
X
L
π
π
2
1
,
2
=
=
2. Pomiar składowych impedancji metodą trzech woltomierzy
a) b)
Układ do pomiaru składowych impedancji metodą trzech woltomierzy
a) Schemat układu
b) Wykres wskazowy
w
R - rezystancja wzorcowa
jX
R
Z
+
=
w
w
R
U
I
R
I
U
1
1
=
⇒
=
w
w
R
U
U
Z
Z
R
U
Z
I
U
1
2
1
2
=
⇒
=
=
16
)
180
cos(
2
0
2
1
2
2
2
1
2
3
ϕ
−
−
+
=
U
U
U
U
U
ϕ
=
−
−
cos
2
2
1
2
2
2
1
2
3
U
U
U
U
U
2
1
2
2
2
1
2
3
2
cos
U
U
U
U
U
−
−
=
ϕ
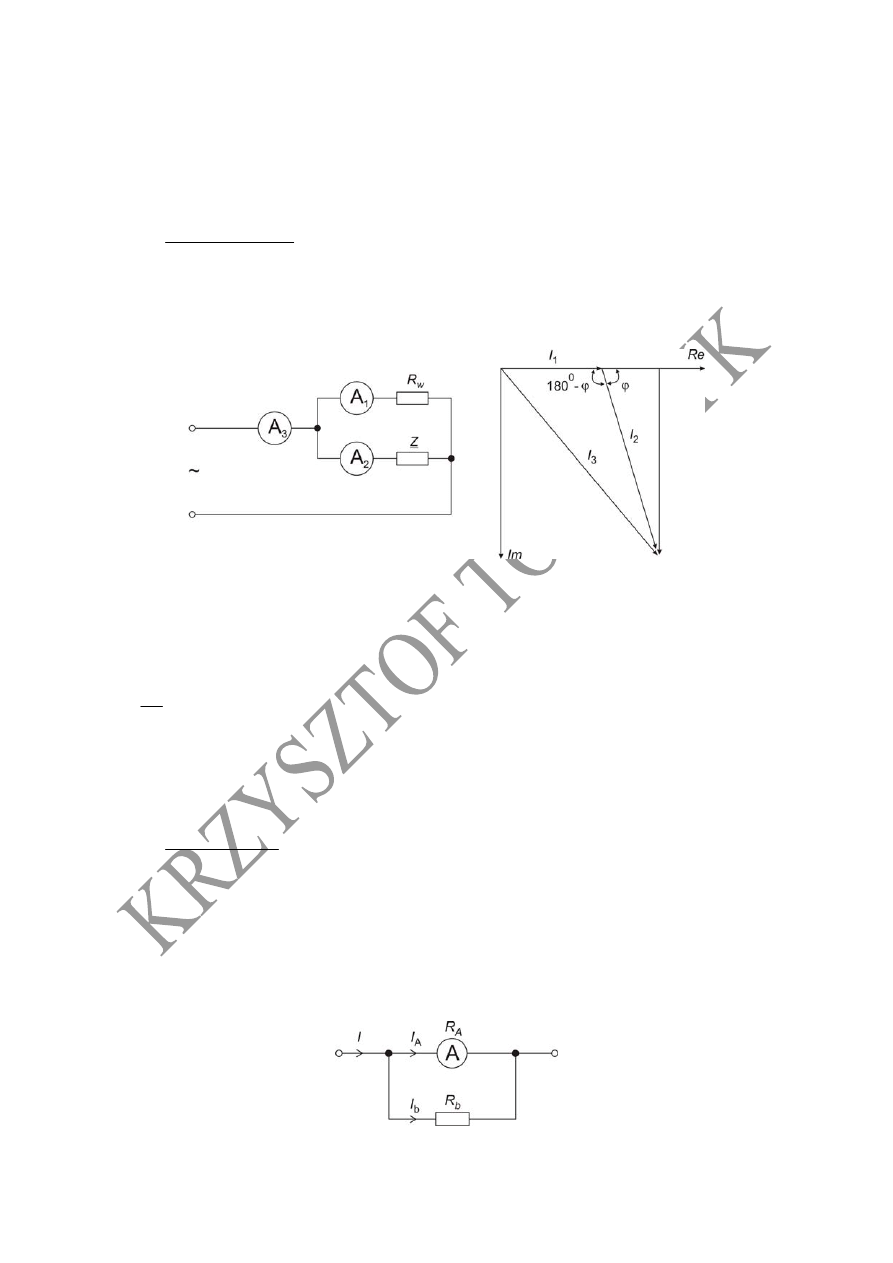
3. Pomiar składowych impedancji metodą trzech amperomierzy
a) b)
Układ do pomiaru składowych impedancji metodą trzech amperomierzy
c) Schemat układu
d) Wykres wskazowy
Z
I
R
I
w
2
1
=
w
R
I
I
Z
2
1
=
)
180
cos(
2
0
2
1
2
2
2
1
2
3
ϕ
−
−
+
=
I
I
I
I
I
ϕ
cos
2
2
1
2
2
2
1
2
3
I
I
I
I
I
=
−
−
2
1
2
2
2
1
2
3
2
cos
I
I
I
I
I
−
−
=
ϕ
Rozszerzanie zakresów pomiarowych przyrządów magnetoelektrycznych
1. Rozszerzanie zakresu pomiarowego amperomierzy magnetoelektrycznych
Schemat układu do rozszerzania zakresu pomiarowego amperomierzy magnetoelektrycznych
17
b
R
- rezystancja bocznika
b
b
A
A
R
I
R
I
=
A
b
I
I
I
−
=
(
)
b
A
A
A
R
I
I
R
I
−
=
1
−
=
−
=
A
A
A
A
A
b
I
I
R
I
I
R
I
R
2. Rozszerzanie zakresu pomiarowego woltomierzy magnetoelektrycznych
p
R
- rezystancja posobnika
p
V
U
U
U
+
=
p
V
R
I
U
U
+
=
V
p
U
U
R
I
−
=
V
R
U
I
=
V
p
V
U
U
R
R
U
−
=
V
V
V
V
V
p
R
U
U
U
R
U
U
R
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
=
−
=
1
)
(
18
KOMPENSATORY NAPIĘCIA STAŁEGO
Pomiar napięcia metodą kompensacyjną realizowany jest poprzez porównanie napięcia
mierzonego
x
E
ze znaną wartością napięcia wzorcowego
w
E
bez poboru prądu z obwodu
kontrolowanego.
Podział metod kompensacyjnych:
1. Kompensacja pojedyncza
2. Kompensacja podwójna
Podział kompensatorów ze względu na dokładność:
1. Laboratoryjne o klasach 0.005, 0,01, 0.02, 0.05
2. Techniczne o klasach dokładności 0,1, 0.2, 0.5 (aktualnie zastąpione woltomierzami
cyfrowymi o dużej dokładności i rezystancji wejściowej)
Podział ze względu na wartości mierzonych napięć:
1. Kompensatory o dużej rezystancji wewnętrznej (wysoko-omowe) do pomiaru napięć
powyżej 100mV (mają prąd pomocniczy w granicach
mA)
1
1
.
0
÷
2. Kompensatory o małej rezystancji wewnętrznej do pomiaru napięć poniżej 100mV
(mają prąd pomocniczy w granicach
mA)
100
10
÷
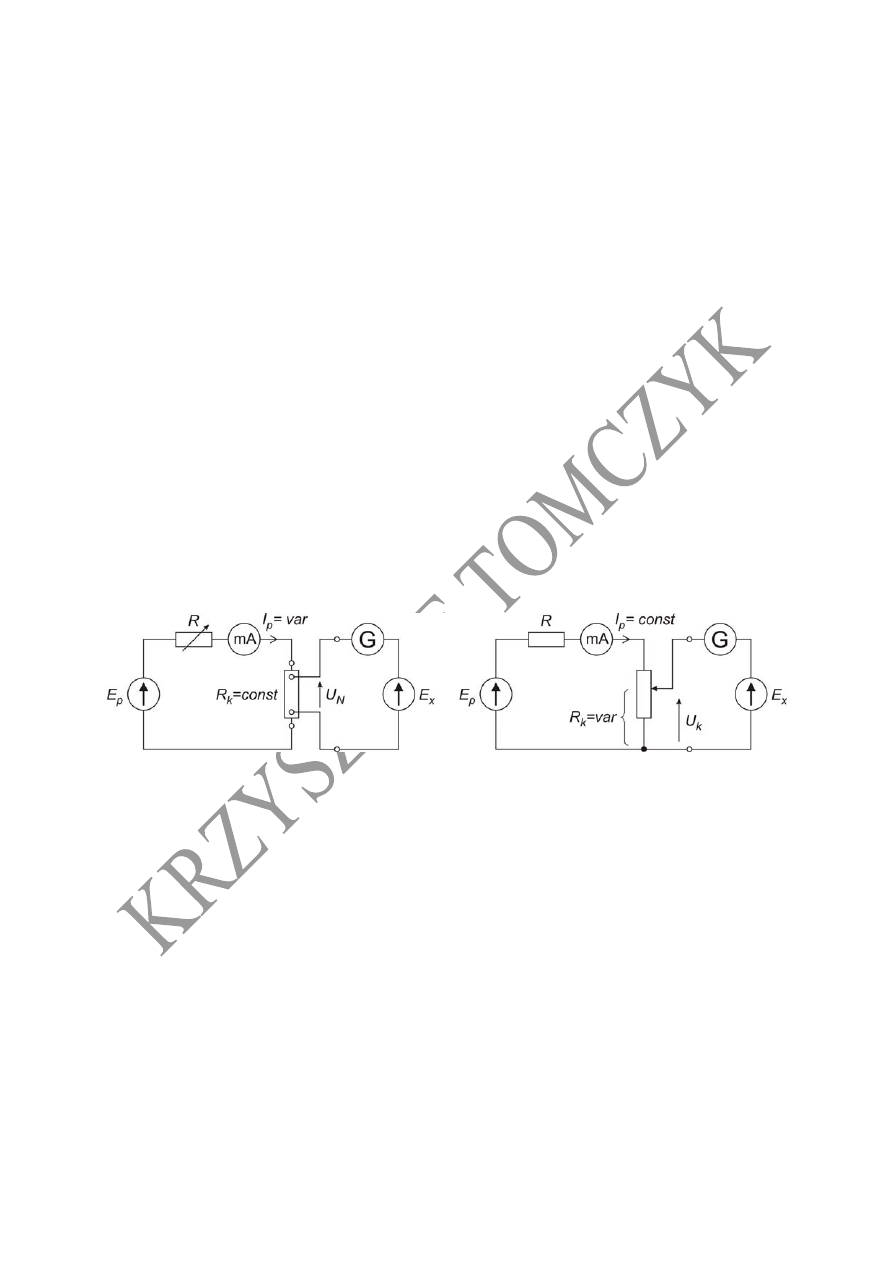
Kompensacja pojedyncza
a) b)
Układy kompensacji pojedynczej
a) o regulowanym prądzie roboczym
b) o stałym prądzie roboczym
W układzie kompensatora o regulowanym prądzie roboczym, wartość prądu roboczego
p
I
regulowana opornikiem
R jest mierzona za pomocą amperomierza. Napięcie mierzone
x
E
porównywane jest ze spadkiem napięcia
N
U
na oporniku wzorcowym
.
N
R
Po uzyskaniu kompensacji (
0
=
G
I
) wartość
x
E
wyznacza się na podstawie wskazania
amperomierza i znanej wartości
N
R
N
p
x
R
I
E
=
W układzie kompensatora o stałym prądzie roboczym, prąd
p
I
o stałej i znanej wartości
wywołuje na oporniku
k
R
(opornik kompensacyjny
)
spadek napięcia, który porównywany
jest z napięciem mierzonym.
Regulując
k
R
doprowadza się układ do stanu kompensacji i wtedy
k
p
x
R
I
E
=
19
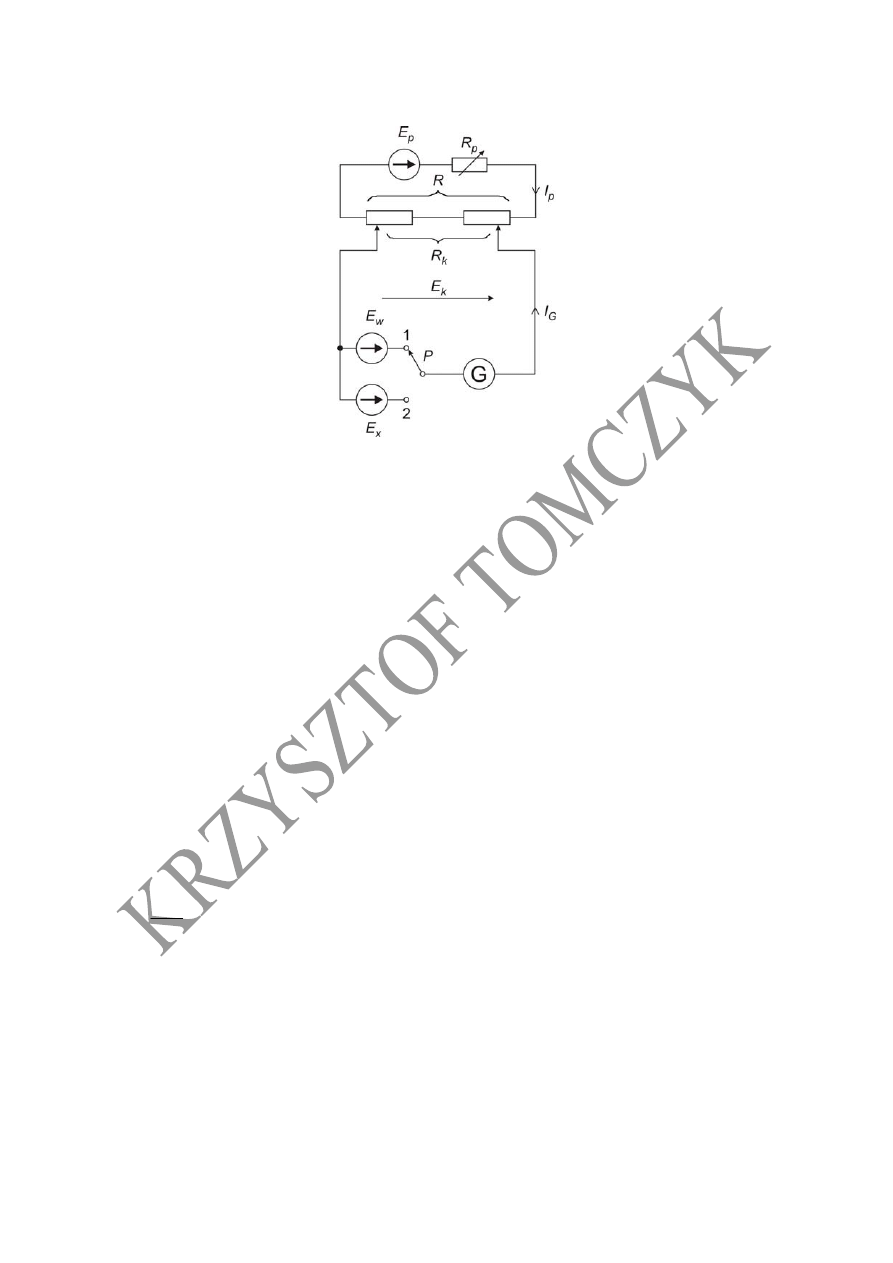
Kompensacja podwójna
Układ kompensacji podwójnej
p
I
- prąd pomocniczy
Zasada kompensacji
Przełączając przełącznik
P w położenie 1 regulujemy
p
R
taki sposób, aby prąd
galwanometru
G
I
był równy zero. Jest to stan kompensacji napięć.
Cały prąd
p
I
płynie przez opornik R, a spadek napięcia
1
k
E
na rezystancji
1
k
R
równy jest
wartości wzorcowej siły elektromotorycznej
w
E
1
k
p
w
R
I
E
=
W analogiczny sposób kompensowane jest napięcie mierzone
,
E
x
poprzez przełączenie
przełącznika
P w położenie 2 i nastawienie na oporniku R takiej rezystancji
2
k
R
dla której
galwanometr będzie w stanie równowagi (
0
=
G
I
).
W stanie kompensacji
2
k
p
x
R
I
E
=
Wstawiając
p
I
ze wzoru na
w
E
do wzoru na
x
E
uzyskuje się
w
k
k
x
E
R
R
E
1
2
=
20
Kompensator Feussnera
W celu zapewnienia dużej dokładności pomiarów kompensacyjnych nie wystarczy precyzyjne
wyznaczenie
.
E
x
Konieczna jest również wysoka dokładność opornika R i duża
rozdzielczość jego regulacji. Takich wymagań nie mogą zapewnić dwie potencjometrycznie
włączone dekady opornika.
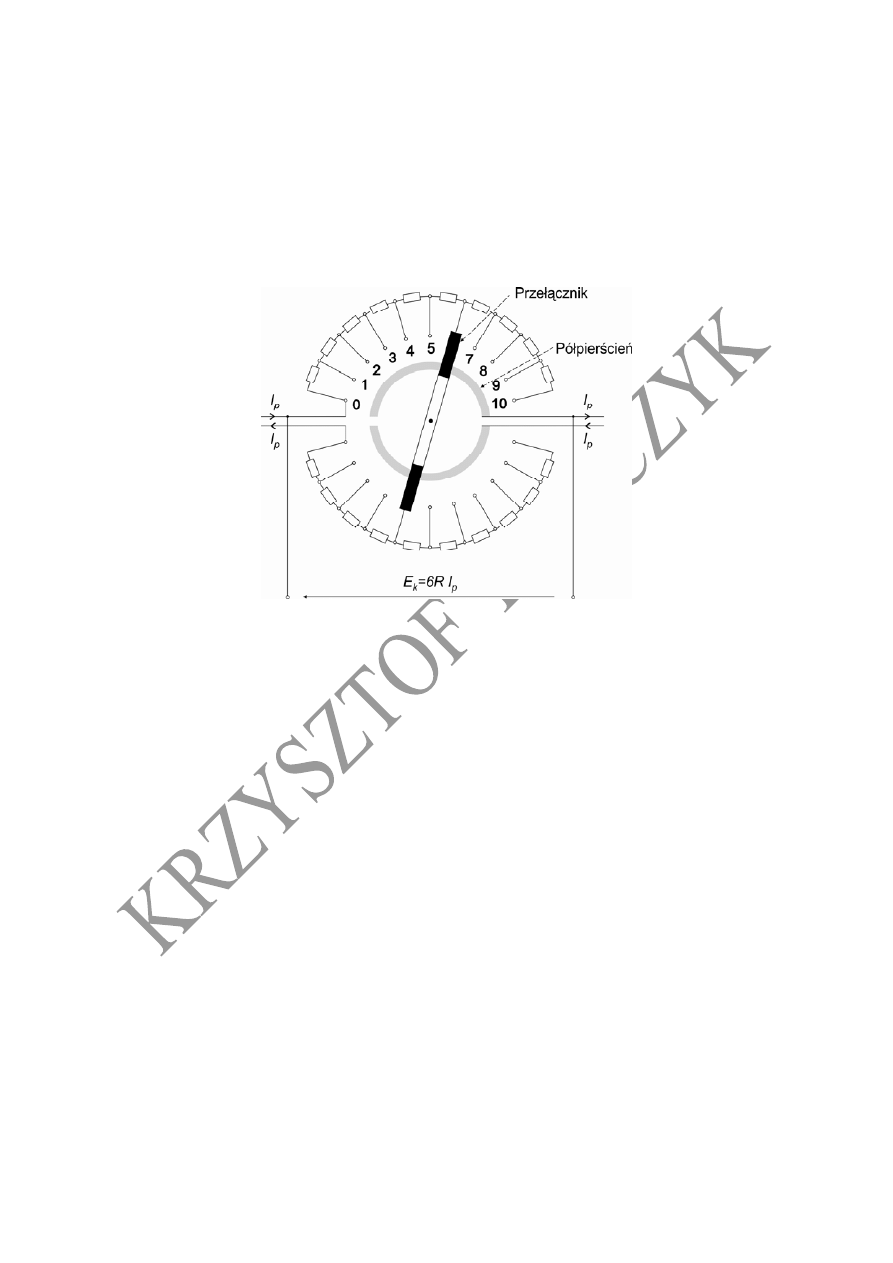
Powyższe wymagania dobrze spełnia dekada Feussnera.
Dekada Feussnera
Prąd pomocniczy
p
I
kompensatora przepływa najpierw przez szereg oporników górnej
gałęzi dekady, a następnie przez górny przełącznik i górną część półpierścienia płynie do
następnych dekad. Wracając trafia do dolnego półpierścienia, a niego przez dolną część
przełącznika płynie przez oporniki dolnej gałęzi dekady.
Konstrukcja dekady Feussnera zapewnia przepływ prądu pomocniczego zawsze przez 10
oporników (przez
n
oporników górnej dekady i przez
n
−
10
oporników dolnej dekady),
niezależnie od ustawienia przełącznika.
Spadek napięcia
k
E
zdejmowanego z górnej gałęzi dekady regulowany jest położeniem
przełącznika.
Pomiędzy dwie zwykłe dekady włączone potencjometrycznie można więc włączyć dowolną
liczbę dekad Feussnera i nastawiać z dowolną rozdzielczością napięcie kompensujące
k
E
przy
p
I
= const.
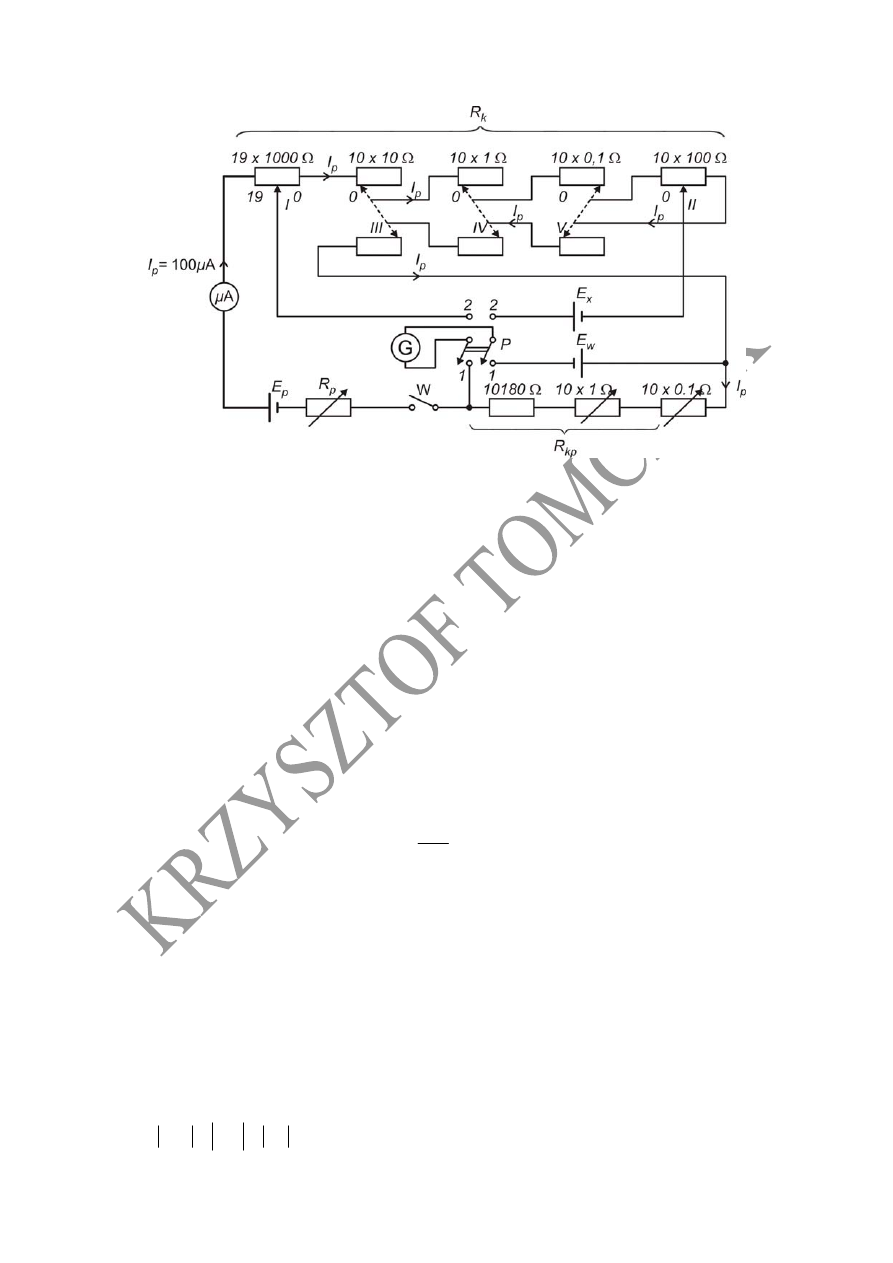
Poniższy rysunek przedstawia układ kompensatora Feussnera o 3 dekadach Feussnera (III-V)
i dwóch zwykłych dekadach (I, II).
Prąd pomocniczy nastawiany jest za pomocą kilkudekadowego opornika
p
R
w taki sposób,
aby jego wartość była stała i wynosiła
.
μA
100
21
Układ kompensatora Feussnera
Zasada kompensacji:
1. Sprawdzić prawidłowość przyłączenia:
x
p
w
E
E
E
,
,
pod względem biegunowości
2. Ze świadectwa legalizacji ogniwa wzorcowego odczytać wartość uwierzytelnioną
SEM i na jej podstawie obliczyć wartość charakterystyczną SEM dla aktualnej
temperatury ogniwa
3. Nastawić
kp
R
na wartość
.
10
4
w
E Dekada
Ω
⋅ 1
.
0
10
służy do uwzględnienia zmiany
w
E
od zmian temperatury
4.
5. Przy otwartym P należy zamknąć W i następnie regulując
p
R
ustawić na μA z
dokładnością wynikającą z jego klasy wartość
p
I
=
.
μA
100
6. Przełączyć P w położenie 1 i regulując
p
R
ustawić
taką dokładną wartość
,
10
4
A
I
p
−
=
dla której wskazanie galwanometru G będzie równe zero,
W takim przypadku zachodzi
kp
w
p
R
E
I
=
7. Przełączyć P w położenie 0
8. Jeżeli znana jest przybliżona wartość
,
x
E
to pokrętłami dekad
k
R
ustawiamy taką
rezystancję
1
k
R
aby iloczyn
1
k
p
R
I
był równy założonej wartości
x
E
9. Stan ten sprawdzamy po przełączeniu P w położenie 2 i doprowadzenie
k
R
do stanu,
dla którego wskazanie galwanometru G będzie równe zero (kontrolujemy stałość
prądu pomocniczego
p
I
przełączając P w położenie 1)
Wtedy
2
k
p
x
R
I
E
=
Po zlogarytmowaniu i zróżniczkowaniu powyższej zależności, otrzymuje się wzór określający
błąd graniczny pomiaru napięcia kompensatorem Feussnera
k
kp
w
x
R
R
E
E
+
+
=
δ
δ
22
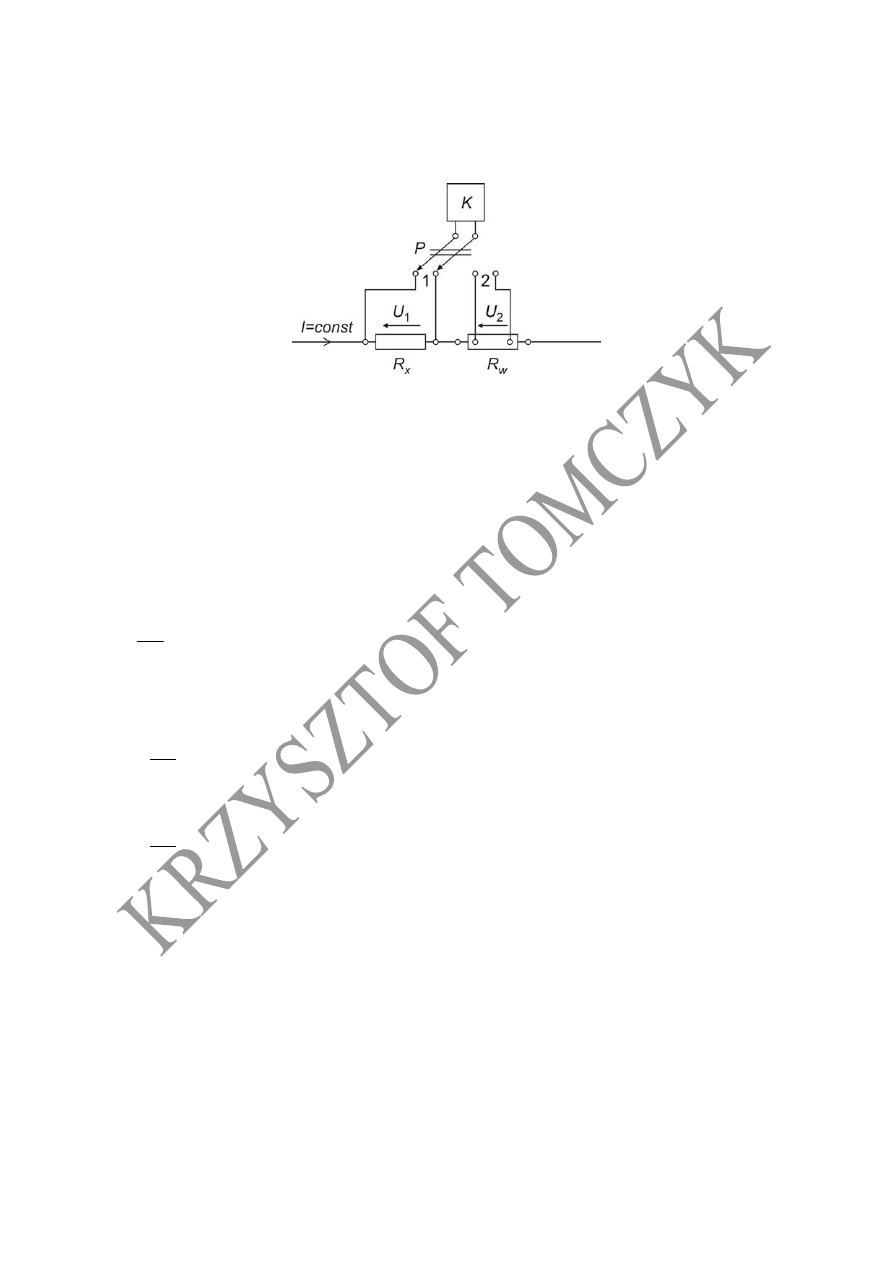
Pomiar rezystancji za pomocą kompensatora
Schemat układu do pomiaru rezystancji za pomocą kompensatora
Rezystancja
x
R
wyznaczana jest poprzez porównanie napięć
1
U
i
,
U
2
wywoływanych tym
samym prądem
.
I
Napięcia te mierzy się dokładnie za pomocą kompensatora.
Jeśli
,
I
const
=
to
Najpierw wyznacza się dokładną wartość prądu mierząc spadek napięcia
1
U
a
w
R
za pomocą
kompensatora.
Wtedy
w
R
U
I
1
=
W drugim pomiarze mierzy się spadek nap.
2
U
na
x
R
powodowany uprzednio
wyznaczonym prądem
I
U
R
x
2
=
więc
w
x
R
U
U
R
1
2
=
Wyszukiwarka
Podobne podstrony:
Wykłady z Metrologii, Wykład 3 - Omomierz Metoda Techniczna Pomiaru Rezystancji
43 Techniki pomiaru sygnałów bioelektrycznych
Wyklad 3 - Omomierz Metoda techniczna pomiaru rezystancji
MW zaliczenie, Politechnika Poznańska ZiIP, IV semestr, IV semestr, Techniki pomiarowe, TechnikiPom,
07.10.12r. - Wykład -Taktyka i technika interwencji policyjnych i samoobrona, Sudia - Bezpieczeństwo
13transplot-ORT, Turystyka i rekreacja wykłady, Metody i techniki obsługi ruchu turystycznego
18obs-imprprzyj-ORT, Turystyka i rekreacja wykłady, Metody i techniki obsługi ruchu turystycznego
27rafting-ORT, Turystyka i rekreacja wykłady, Metody i techniki obsługi ruchu turystycznego
progrwyklORT-sz, Turystyka i rekreacja wykłady, Metody i techniki obsługi ruchu turystycznego
09kp-atnicza-ORT, Turystyka i rekreacja wykłady, Metody i techniki obsługi ruchu turystycznego
Techniki pomiaru procesów psychiznych, oligofrenopedagogika, zachomikowane
24turystkwalif-wstep-ORT, Turystyka i rekreacja wykłady, Metody i techniki obsługi ruchu turystyczne
wykłady procesy i techniki produkcyjne
ZASTOSOWANIE OSCYLOSKOPU W TECHNICE POMIAROWEJ
milczarski,elektroniczna technika pomiarowa, pomiar kątów
Technika pomiarów
Laboratoria z techniki pomiarowej, tech.pom., LABORATORIUM PODSTAW BUDOWY URZĄDZEŃ TRANSPORTOWYCH
17rentacar-ORT, Turystyka i rekreacja wykłady, Metody i techniki obsługi ruchu turystycznego
więcej podobnych podstron