5.2.1. Tor, prędkość i przyśpieszenie punktu
Rozpatrzmy ruch punktu materialnego względem przyjętego układu odniesienia
uważanego za nieruchomy. Aby poznać ruch tego punktu, w każdej chwili musimy
mieć możliwość wyznaczenia miejsca, w którym się ten punkt znajduje. Do okre-
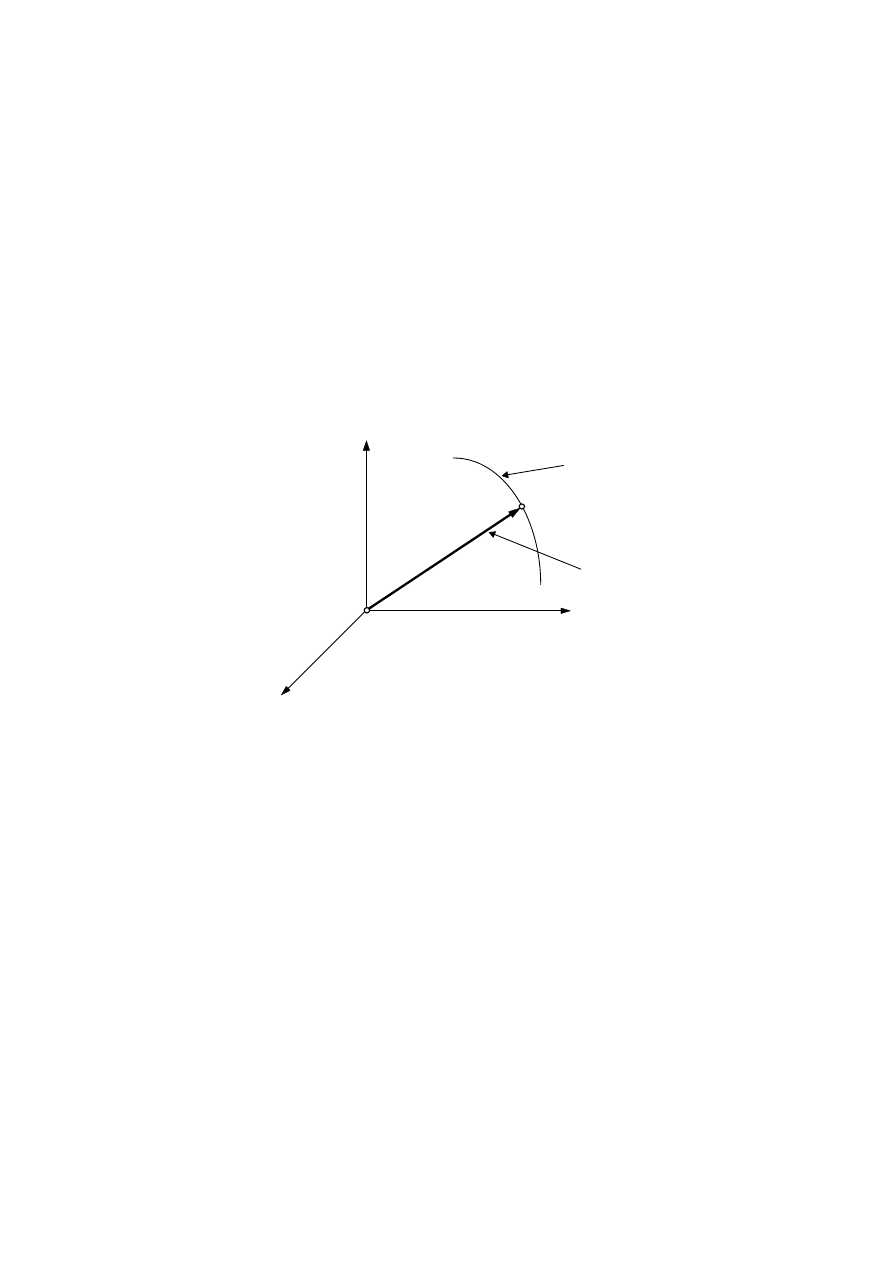
ślenia położenia dowolnego punktu M (rys. 5.1) w każdej chwili względem nieru-
chomego punktu O wystarczy podanie wektora r o początku w punkcie O i końcu
w rozważanym punkcie M.
z
L
y
x
O
r
M
hodograf wektora
wodzącego
wektor
wodzący
Rys. 5.1. Opis położenia punktu za pomocą wektora wodzącego
Wektorową funkcję czasu
( )
r r
= t (5.1)
nazywamy wektorem wodzącym. Wektor ten możemy zapisać analitycznie
w prostokątnym układzie współrzędnych x, y, z za pomocą jego współrzędnych
w postaci funkcji wektorowej:
( ) ( ) ( ) ( )
r r
i
j
k
=
=
+
+
t
x t
y t
z t
(5.2)
lub równoważnych trzech równań skalarnych
( )
( )
( )
x x t
y y t
z z t
=
=
=
,
,
. (5.3)
Równanie (5.1) lub (5.2) nazywamy wektorowym równaniem ruchu, a trzy
równania (5.3), równoważne wektorowemu, skalarnymi lub algebraicznymi rów-
naniami ruchu.
91
Gdy punkt M będzie się poruszał, wektor r będzie zmieniał z upływem czasu
swoją wartość i kierunek, a koniec tego wektora zakreśli krzywą L, którą będziemy
nazywać torem punktu lub hodografem wektora wodzącego r. Jak już powiedziano
w p. 2.3.7, hodograf rozpatrywanej funkcji wektorowej to linia zakreślona przez
końce wektorów, których początki znajdują się w jednym punkcie.
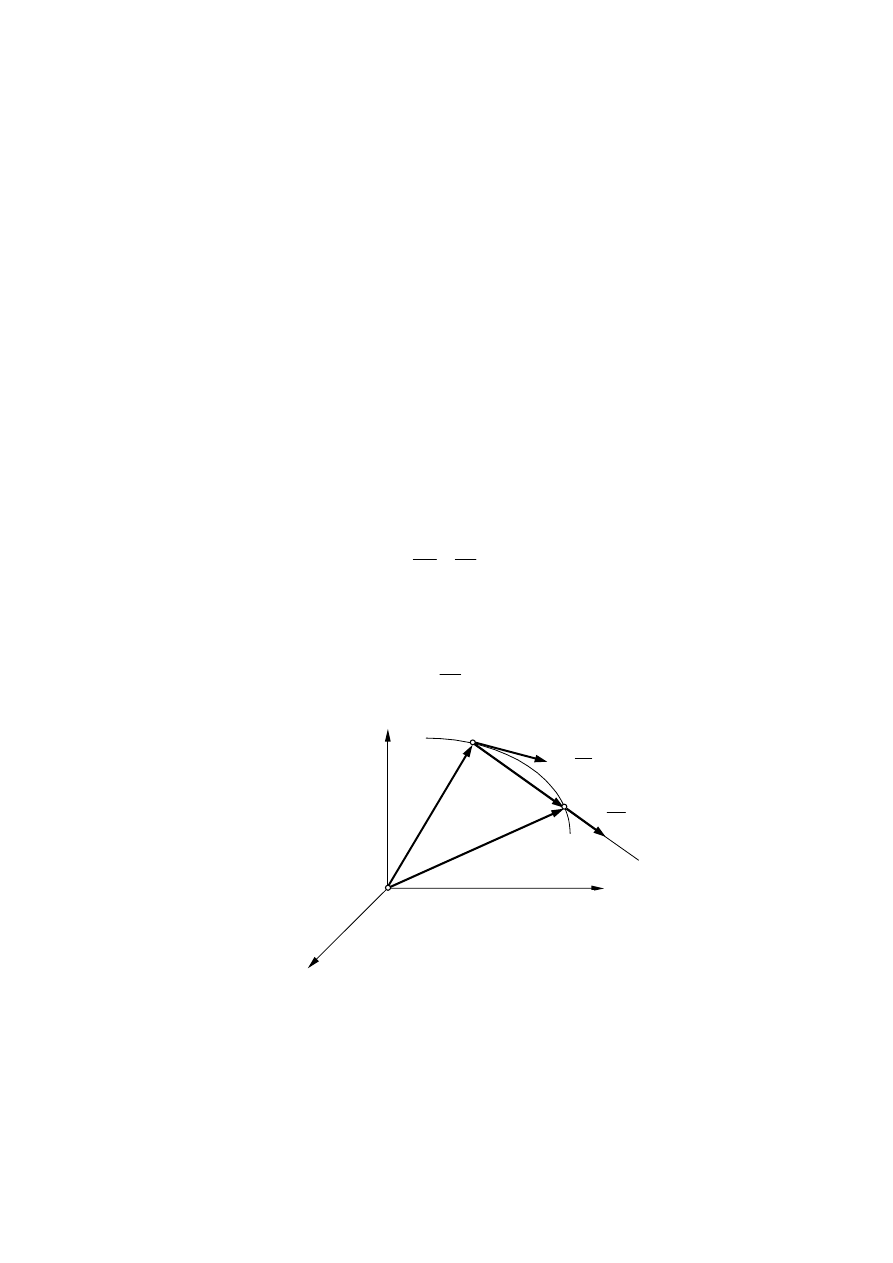
W czasie ruchu punktu M wektor wodzący r tego punktu będzie zmieniał swoją
wartość i kierunek. Załóżmy, że w chwili czasu t
1
położenie punktu M
1
wyznacza
wektor wodzący r
1
= r(t
1
), a w chwili t
2
= t
1
+
∆t punkt zajmuje położenie M
2
wy-
znaczone przez wektor wodzący r
2
= r(t
2
), jak na rys. 5.2. Widzimy, że po upływie
czasu
∆t = t
2
– t
1
wektor wodzący uzyskał przyrost
∆r = r
2
– r
1
. Iloraz
∆r/∆t jest
wektorem współliniowym z wektorem
∆r, czyli jest skierowany wzdłuż cięciwy
M
1
M
2
. Jeżeli przyrost czasu
∆t będzie dążył do zera, to w granicy otrzymamy po-
chodną wektora r względem czasu:
lim
t 0
∆
∆
∆
→
=
=
r
r
v
t
d
dt
,
nazywaną prędkością punktu. Oznacza to, że prędkością punktu nazywamy
pochodną względem czasu wektora wodzącego tego punktu:
v
r
=
d
dt
. (5.4)
O
z
y
x
r
1
r
2
M
1
L
M
2
∆r
∆
∆
r
t
v
r
=
d
dt
Rys. 5.2. Prędkość punktu
Łatwo zauważyć, że jeżeli punkt M
2
dąży do punktu M
1
, to cięciwa M
1
M
2
dąży
do stycznej do toru w punkcie M
1
. Wynika stąd, że prędkość punktu jest styczna do
toru punktu M, czyli styczna do hodografu wektora wodzącego r.
92
Gdy wektor wodzący zapiszemy w postaci (5.2), to zgodnie z podanymi
w p. 2.3.7 zasadami różniczkowania jego pochodna
v
r
i
j
=
=
+
+
d
dt
dx
dt
dy
dt
dz
dt
k
k
. (5.5)
Po zapisaniu prędkości v w układzie współrzędnych x, y, z
v
i
j
=
+
+
v
v
v
x
y
z
(5.6)
i podstawieniu do równania (5.5) oraz po porównaniu wyrazów przy tych samych
wersorach otrzymamy wzory na współrzędne prędkości:
v
dx
dt
v
dy
dt
v
dz
dt
x
y
z
=
=
,
,
=
.
(5.7)
Widzimy, że współrzędne prędkości są równe pochodnym względem czasu odpo-
wiednich współrzędnych wektora wodzącego.
Wartość prędkości określa wzór:
v
v
v
v
x
y
z
=
+
+
2
2
2
. (5.8)
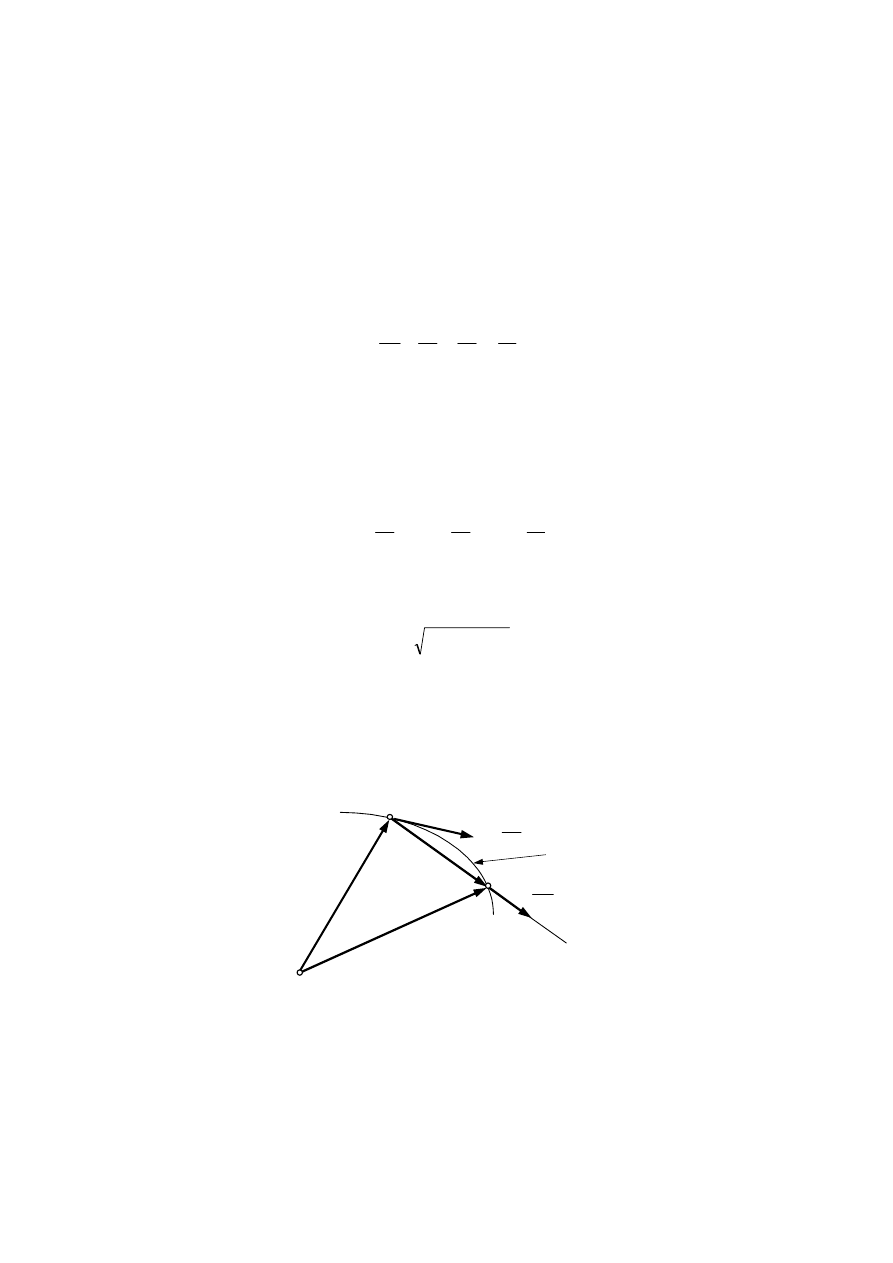
W czasie ruchu punktu M jego prędkość
v w ogólnym przypadku ruchu zmienia
zarówno swoją wartość, jak i kierunek. Jeżeli dla dwóch położeń punktu M, odpo-
wiadających chwilom t
1
i t
2
= t
1
+
∆t, wektory prędkości oznaczymy odpowiednio
przez
v
1
i
v
2
i przesuniemy je tak, aby ich początki znalazły się w jednym punkcie
O
1
(rys. 5.3), to widzimy, że prędkość w czasie
∆t = t
2
– t
1
uzyskała przyrost
∆v = v
2
–
v
1
. Końce tych wektorów leżą na linii, którą nazywamy hodografem
prędkości
.
v
1
O
1
∆v
∆
∆
v
t
v
2
a
v
=
d
dt
hodograf prędkości
Rys. 5.3. Przyśpieszenie punktu
Wielkością charakteryzującą zmianę prędkości w czasie jest wektor
∆v/∆t
o kierunku przyrostu prędkości
∆v. Jeżeli przyrost czasu ∆t będzie dążył do zera, to
93
w granicy otrzymamy pochodną prędkości
v względem czasu, nazywaną przyśpie-
szeniem
a punktu M:
lim
t 0
∆
∆
∆
→
=
=
v
v
a
t
d
dt
.
Przyśpieszenie punktu jest pochodną prędkości względem czasu albo drugą
pochodną wektora wodzącego względem czasu
.
a
v
=
=
d
dt
d
dt
2
2
r
k
. (5.9)
Kierunek przyśpieszenia jest styczny do hodografu prędkości v.
W
prostokątnym układzie współrzędnych x, y, z przyśpieszenie a możemy za-
pisać w następujący sposób:
a
i
j
=
+
+
a
a
a
x
y
z
. (5.10)
W celu wyznaczenia współrzędnych przyśpieszenia zróżniczkujemy względem
czasu prędkość wyrażoną wzorem (5.6):
a
v
i
j
=
=
+
+
d
dt
dv
dt
dv
dt
dv
dt
x
y
z
k . (5.11)
Po uwzględnieniu zależności (5.7) współrzędne przyśpieszenia będą opisane zależ-
nościami:
a
dv
dt
d x
dt
a
dv
dt
d y
dt
a
dv
dt
d z
dt
x
x
y
y
z
z
=
=
=
=
=
=
2
2
2
2
2
2
,
,
. (5.12)
Z
powyższych wzorów wynika, że współrzędne przyśpieszenia punktu w nieru-
chomym prostokątnym układzie współrzędnych są pierwszymi pochodnymi wzglę-
dem czasu współrzędnych prędkości lub drugimi pochodnymi względem czasu
odpowiednich współrzędnych tego punktu.
Znając współrzędne przyśpieszenia, jego moduł obliczymy ze wzoru:
a
a
a
a
x
y
=
+
+
2
2
z
2
. (5.13)
5.2.2. Prędkość i przyśpieszenie punktu w naturalnym układzie współrzędnych
W poprzednim punkcie wyznaczyliśmy współrzędne prędkości
v i przyśpiesze-
nia
a w prostokątnym układzie współrzędnych x, y, z. Na podstawie takiego postę-
94
powania nie można ustalić, jak porusza się punkt względem toru L i jak zmieniają
się moduły i kierunki wektorów prędkości
v i przyśpieszenia a w funkcji przebytej
drogi l. W celu udzielenia odpowiedzi na postawione pytanie przyjmijmy w punk-
cie M lokalny układ współrzędnych prostokątnych o osiach s, n, b o kierunkach
odpowiednio stycznym s, normalnym n i binormalnym b do krzywej
w rozważanym punkcie M (rys. 5.4). Kierunki osi s, n, b takiego układu współ-
rzędnych będą określone odpowiednio wersorami
e
s
,
e
n
i
e
b
. Tak zdefiniowane
wersory
e
s
,
e
n
i
e
b
wyznaczają w każdym punkcie linii (toru) L prawoskrętny układ
współrzędnych, który nazywamy układem naturalnym.
z
y
x
r(l)
M
O
s
b
e
s
e
n
e
b
L
n
Rys. 5.4. Ruch punktu w naturalnym układzie współrzędnych
Wykażemy, że jeżeli dane jest wektorowe równanie toru w funkcji drogi l mie-
rzonej wzdłuż toru:
( )
r r
= l , (5.14)
to wersory te są opisane wzorami:
e
r
e
r
e
e
e
s
s
n
b
d
dl
d
dl
=
=
=
,
,
ρ
2
2
n
×
,
(5.15)
gdzie
ρ jest promieniem krzywizny w punkcie M.
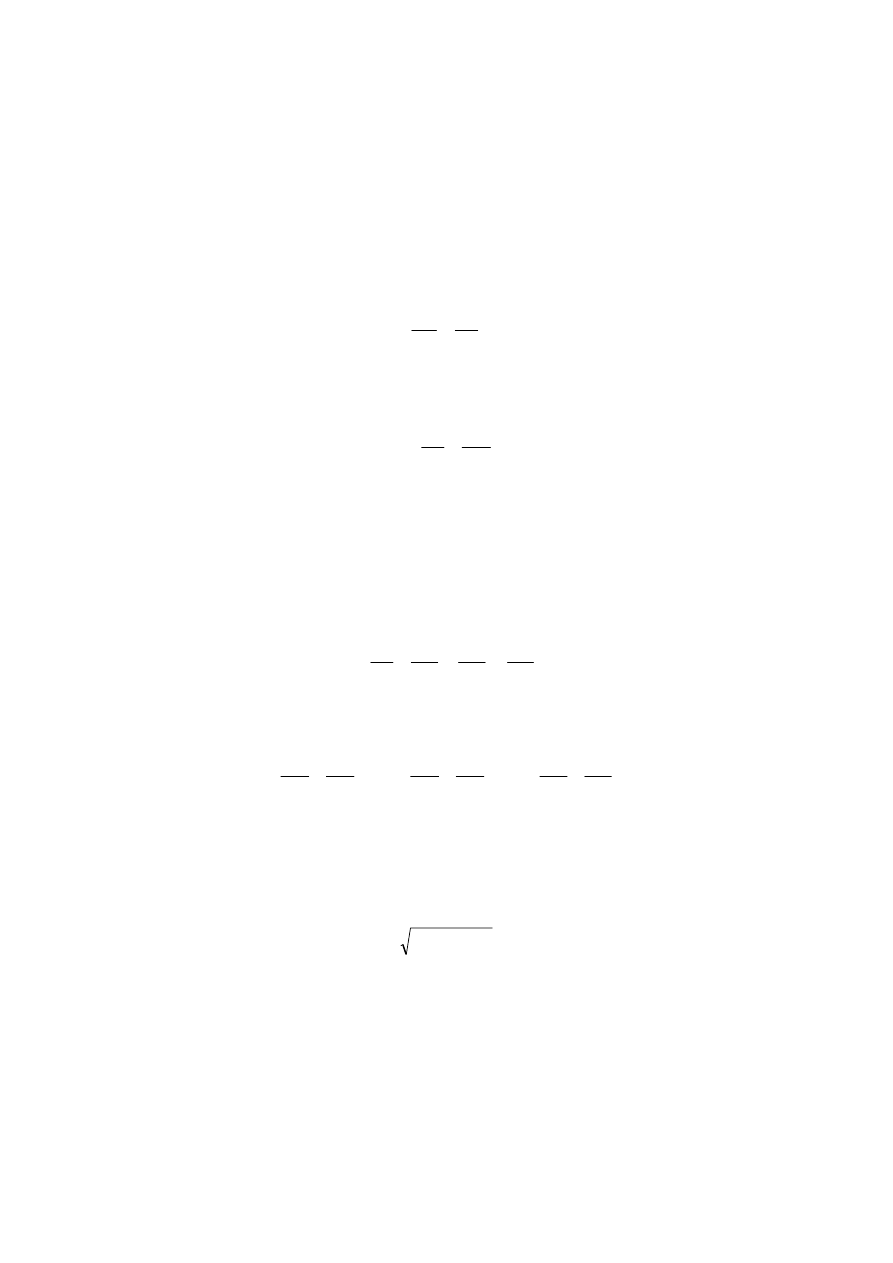
W tym celu przedstawmy fragment linii L w płaszczyźnie ściśle stycznej sn
widzianej od strony strzałki osi binormalnej b (rys. 5.5). Na torze (linii) obierzmy
punkt M i drugi M
′ tak, aby długość ∆l drogi mierzona po łuku MM′ była niewiel-
ka. Jeżeli weźmiemy granicę ilorazu przyrostu wektora wodzącego
∆r i przyrostu
drogi
∆l
95
lim
,
∆
∆
∆
→
=
0
r
r
l
d
dl
to otrzymamy pochodną wektora wodzącego r względem drogi l. Moduł tej po-
chodnej jest równy jedności, ponieważ gdy
∆l będzie dążyć do zera, to długość
cięciwy MM
′ = ∆r będzie dążyć do długości łuku ∆l:
lim
l 0
∆
∆
∆
→
=
=
r
r
l
d
dl
1 .
Zatem pochodna wyrażona wzorem:
e
r
s
=
d
dl
jest równa wersorowi stycznej e
s
do toru w punkcie M.
r(l+
∆l)
O
M
M
N
∆e
s
e
s
s
e
s
∆r
r(l)
n
n
′
e
n
ρ
L
′
e
s
Rys. 5.5. Ruch punktu w płaszczyźnie ściśle stycznej
Aby
udowodnić słuszność wzoru na wersor normalnej e
n
w punkcie M, wykre-
ślamy styczną s oraz jej wersor e
s
i normalną n, a w punkcie M
′ wersor stycznej
i normalną n
′. Punkt przecięcia osi n′ i n oznaczymy przez N. Widzimy, że wersor
e
′
e
s
s
podczas przemieszczania się z punktu M do M
′ doznał przyrostu ∆e
s
. Jeżeli zbu-
dujemy wektor będący ilorazem przyrostu
∆e
s
i długości łuku
∆l i wyznaczymy
granicę tej wielkości przy
∆l dążącym do zera, to otrzymamy drugą pochodną wek-
tora wodzącego r względem drogi l:
lim
l 0
∆
∆
∆
→
=
=
e
e
s
s
l
d
dl
d
dl
2
2
r
. (a)
96
Kierunek tego wektora będzie normalny do krzywej w punkcie M, ponieważ jeżeli
punkt M
′ będzie się zbliżał do punktu M, to kąt między przyrostem ∆e
s
i wersorem
e
s
będzie dążył do kąta prostego. Można to też wykazać analitycznie. Wiadomo, że
iloczyn wersora pomnożonego skalarnie przez siebie będzie równy jedności:
e e
s
s
⋅ = 1.
Po zróżniczkowaniu tej zależności względem czasu mamy:
e
e
s
s
d
dt
⋅
= 0 lub e
e
s
s
⋅
=
d
dl
dl
dt
0 ,
a po podzieleniu przez dl/dt
e
e
e
r
s
s
s
⋅
= ⋅
=
d
dl
d
dl
2
2
0 .
Z
powyższego wynika, że druga pochodna wektora wodzącego względem drogi
jest wektorem prostopadłym do osi stycznej s.
Wyznaczymy obecnie moduł drugiej pochodnej wektora wodzącego r wzglę-
dem drogi l. Z rysunku 5.5 można zauważyć, że dla małych przyrostów
∆r trójkąt
e
s
∆e
s
i trójkąt N M M
′ są podobne. Możemy zatem napisać:
′
e
s
∆
∆
e
r
e
s
s
=
MN
.
Wiadomo także, że gdy
∆l będzie dążyć do zera, to długość przyrostu ∆r będzie
dążyć do długości łuku
∆l, czyli ⏐∆r⏐ = ∆l. Powyższą równość zapiszemy zatem
w postaci:
∆
∆
e
e
s
s
l
MN
=
,
a po obliczeniu granicy tej równości mamy:
lim
l 0
∆
∆
∆
→
=
=
=
=
=
e
e
r
e
s
s
s
l
d
dl
d
dl
MN
MN
2
2
1
1
ρ
,
ponieważ z geometrii analitycznej wiadomo, że granica:
lim
M
M
′→
′ =
M N
ρ
jest promieniem krzywizny, czyli promieniem koła ściśle stycznego w rozpatrywa-
nym punkcie.
97
Ostatecznie
moduł drugiej pochodnej wektora wodzącego r względem drogi l
jest równy odwrotności promienia krzywizny, nazywanej krzywizną
w rozważanym punkcie:
d
dl
2
2
1
r =
ρ
. (5.16)
Wersor osi normalnej e
n
otrzymamy przez podzielenie wektora (a) o kierunku
normalnej przez jego moduł (5.16):
e
r
r
r
r
n
d
dl
d
dl
d
dl
d
dl
=
=
=
2
2
2
2
2
2
2
2
1
ρ
ρ
.
Dla wyprowadzenia wzorów na prędkość v i przyśpieszenie a punktu M przed-
stawimy wektor wodzący r(t) w postaci funkcji złożonej: r(t) = r[l(t)].
Z definicji prędkości i ze wzoru (2.51) na obliczanie pochodnej funkcji złożonej
mamy:
v
r
r
=
=
d
dt
d
dl
dl
dt
.
W powyższym wzorze pierwsza pochodna jest wyliczonym wersorem e
s
osi stycz-
nej s, a druga modułem prędkości równym pochodnej drogi względem czasu:
v
dl
dt
=
. (5.17)
Zatem prędkość przedstawia wzór:
v
e
= v
s
. (5.18)
Otrzymaliśmy zatem potwierdzenie, że prędkość punktu jest styczna do toru.
Przyśpieszenie obliczymy, licząc pochodną prędkości względem czasu. Korzy-
stając ze wzoru na pochodną iloczynu, otrzymamy:
2
2
2
dl
d
v
dt
dv
dt
dl
dl
d
v
dt
dv
dt
d
v
dt
dv
r
e
e
e
e
e
a
s
s
s
s
s
+
=
+
=
+
=
.
Po podstawieniu do tego wzoru zależności na wersor normalnej:
d
dl
2
2
r
e
n
=
ρ
98
otrzymujemy wzór na przyśpieszenie punktu M w naturalnym układzie współrzęd-
nych:
a
e
s
=
+
dv
dt
v
2
ρ
e
n
n
(5.19)
lub
a a
a
s
= +
. (5.20)
Z otrzymanego wzoru wynika, że przyśpieszenie w rozważanym układzie
współrzędnych s, n, b ma dwie składowe: styczną a
s
i normalną a
n
(skierowaną do
środka krzywizny) i leży w płaszczyźnie ściśle stycznej sn. Moduły tych składo-
wych są następujące:
a
dv
dt
a
v
s
n
=
=
,
2
ρ
, (5.21)
a wartość przyśpieszenia całkowitego obliczymy ze wzoru:
a
a
a
s
=
+
2
n
2
t
. (22)
Ze wzorów (5.21) widać, że przyśpieszenie styczne a
s
jest miarą zmiany pręd-
kości i jest równe zeru, gdy moduł prędkości będzie stały, z kolei przyśpieszenie
normalne a
n
jest miarą zakrzywienia toru. W ruchu prostoliniowym przyśpieszenie
normalne jest równe zeru.
W ruchu punktu po krzywej płaskiej znane są kierunki składowych przyśpie-
szenia albo ich wyznaczenie nie nastręcza większych trudności, ponieważ wektory
obu składowych przyśpieszenia będą leżały w płaszczyźnie ruchu. W przypadku
ruchu przestrzennego punktu przy obliczaniu omawianych składowych przyśpie-
szenia mogą się pojawić trudności natury matematycznej.
Przykład 5.1. Punkt porusza się w płaszczyźnie xy zgodnie z równaniami ru-
chu:
x
t
= −
+
−
4
1
3
2
, y =
.
Wyznaczyć równanie toru, prędkość, przyśpieszenie styczne normalne i całkowite
oraz promień krzywizny dla czasu t
1
= 0,5 s. Przyjąć wymiary w metrach, a czas
w sekundach.
Rozwiązanie. W celu wyznaczenia równania toru punktu należy z równań ruchu
wyeliminować parametr t (czas). Po wyznaczeniu z drugiego równania ruchu czasu
i podstawieniu do pierwszego otrzymujemy:
99
(
)
y
x
2
9
4
1
= −
− .
Równanie to przedstawia parabolę.
Współrzędne prędkości punktu wyznaczymy ze wzorów (5.7), a jej moduł ze
wzoru (5.8).
v
dx
dt
t
dy
dt
x
=
= −
=
= −
8
3
, v
y
,
( )
s
m
5
25
9
2
1
64
t
v
a
,
9
t
64
v
v
v
2
1
2
2
y
2
x
/
=
=
+
⎟
⎠
⎞
⎜
⎝
⎛
=
+
=
+
=
.
Współrzędne przyśpieszenia i jego wartość wyliczymy ze wzorów (5.12) i (5.13):
a
dv
dt
dv
dt
x
x
y
=
= −
=
=
8
0
, a
y
,
a
a
a
m s
x
y
=
+
=
+ =
2
2
64 0
8
/
2
.
Przyśpieszenie styczne obliczymy z pierwszego wzoru (5.21):
a
dv
dt
t
t
t
t
s
=
=
⋅
+
=
+
2 64
2 64
9
64
64
9
2
2
,
( )
a t
m s
s
1
2
2
64
1
2
64
1
2
9
32
25
6 4
=
⋅
⎛
⎝⎜
⎞
⎠⎟
+
=
= ,
/
.
W celu wyznaczenia przyśpieszenia normalnego przekształcimy wzór (5.22) do
postaci:
a
a
a
n
s
=
−
2
2
.
Po podstawieniu do tego wzoru wyliczonych wyżej wartości liczbowych otrzyma-
my przyśpieszenie normalne w chwili :
t
1
( )
( )
a t
m s
n
1
2
2
2
8
6 4
4 8
=
−
=
,
,
/
.
Promień krzywizny obliczymy z drugiego wzoru (5.21):
m
,2
5
8
,
4
5
a
v
ρ
2
n
2
=
=
=
.
100
Przykład 5.2. Dane są kinematyczne równania ruchu punktu M w prostokąt-
nym układzie współrzędnych:
x
t
t
t
= − −
−
−
2 3
6
3
2
3
2
2
, y = 3
t
,
gdzie x i y są podane w metrach, a czas w sekundach. Wyznaczyć równanie toru,
promień krzywizny, prędkość, przyśpieszenie styczne, normalne i całkowite. Tor
oraz składowe prędkości i przyśpieszenia dla chwili początkowej t = 0 przedstawić
na rysunku.
Rozwiązanie. Jeżeli drugie równanie ruchu pomnożymy stronami przez
−
i dodamy do pierwszego, to otrzymamy równanie toru w postaci:
2
y
x
=
+
1
2
2 .
x
0
y
x
v
0
a
v
0x
v
0y
a
y
a
x
B
A
O
M
y
0
Rys. 5.6. Prędkość i przyśpieszenie punktu we współrzędnych prostokątnych na płasz-
czyźnie
Jest to równanie prostej, która odcina na osi odciętych odcinek OA = 4 m i na osi
rzędnych odcinek OB = 2 m (rys. 5.6). Położenie punktu M na prostej (torze) dla
chwili początkowej t = 0 wyznaczymy z równań ruchu: x
0
2
= , y = 3
0
. Ponieważ
promień krzywizny jest równy nieskończoności (
∞
=
ρ
), przyśpieszenie normalne
jest równe zeru:
a
v
n
=
=
2
0
ρ
.
Współrzędne prostokątne prędkości i przyśpieszeń oraz ich moduły obliczymy tak
jak w poprzednim przykładzie.
Prędkość:
101
(
)
(
)
v
dx
dt
t
dy
dt
t
x
=
= −
+
=
= −
+
3 1 4
3
2
1 4
, v
y
, (a)
(
)
(
)
(
4t
+
1
5
2
3
=
t
4
1
4
1
t
4
1
3
v
v
v
2
2
2
y
2
x
+
+
+
=
+
=
)
. (b)
Przyśpieszenie:
a
dv
dt
dv
dt
x
x
y
=
= −
=
= −
12
6
, a
y
,
a
a
a
m s
x
y
=
+
=
+
=
2
2
2
2
12
6
6 5
/
2
.
Przyśpieszenie styczne:
a
a
dv
dt
m s
s
= =
=
⋅ =
3
2
5 4 6 5
2
/
.
Z otrzymanych wyników widzimy, że punkt M porusza się po prostej ze stałym
przyśpieszeniem skierowanym tak jak na rysunku.
Prędkości w chwili początkowej otrzymamy po podstawieniu do wzorów (a) i
(b) t = 0.
v
m
x
y
0
0
3
3
2
3
2
5
= −
= −
=
, v
, v
0
/ s
.
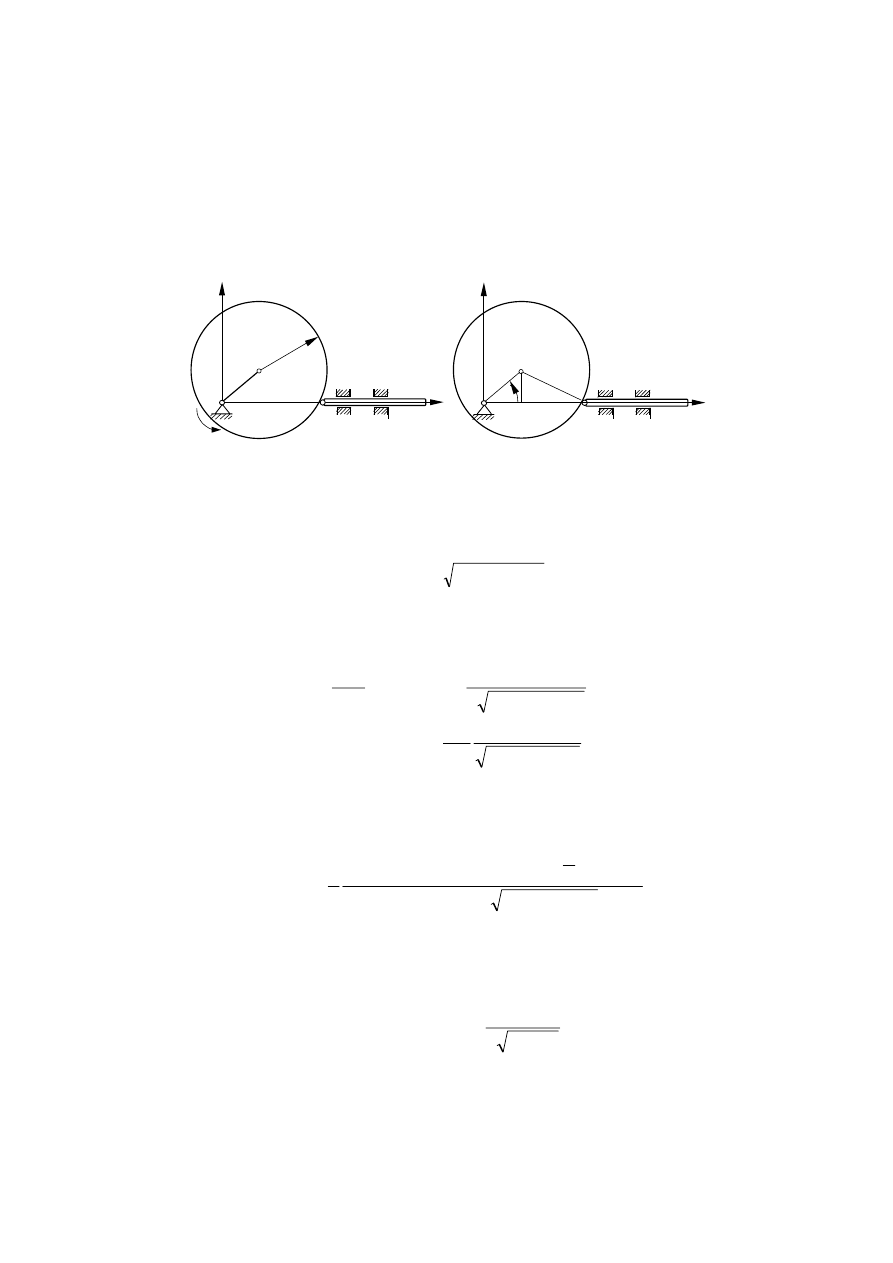
Przykład 5.3. Trzpień AB (rys. 5.7a) jest dociskany do mimośrodu w kształcie
tarczy kołowej o promieniu r tak, że cały czas pozostaje z nim w kontakcie. Oś
obrotu mimośrodu przechodzi przez punkt O oddalony od środka tarczy C o OC =
e. Mimośród obraca się wokół osi obrotu ze stałą prędkością kątową
.
Wyznaczyć prędkość i przyśpieszenie trzpienia dla czasu t
ω π
=
−
s
1
1
= 0,5 s, jeżeli oś
trzpienia pokrywa się z osią x tak jak na rysunku.
Rozwiązanie. Dla obliczenia prędkości i przyśpieszenia trzpienia musimy uło-
żyć jego równanie ruchu, np. równanie punktu A. Na podstawie rys. 5.7b możemy
napisać:
(
)
x
OA OD DA e
CD
e
r
e
e
r
e
A
=
=
+
=
−
=
=
+
−
=
+
−
cos + r
cos
sin
cos
sin
2
2
ϕ
ϕ
ϕ
ϕ
2
2
2
2
2
ϕ
.
102
y
O
A
C
B
r
x
y
O
A
C
B
r
x
D
e
ϕ
a)
b)
Rys. 5.7. Wyznaczenie ruchu trzpienia AB
Po podstawieniu do tej zależności, zgodnie z treścią zadania,
t
t
π
=
ω
=
ϕ
otrzy-
mamy równanie ruchu punktu A:
x
e
r
e
A
=
+
−
cos t
sin
2
π
2
2
t
π . (a)
Prędkość punktu A otrzymamy po obliczeniu pochodnej tego równania względem
czasu:
=
π
−
π
π
π
−
π
π
−
=
=
t
sin
e
r
2
t
cos
t
sin
e
+
t
sin
e
dt
dx
v
2
2
2
2
A
A
( )
.
t
sin
e
r
t
2
sin
4
e
t
sin
e
2
2
2
2
π
−
π
π
−
π
π
−
=
(b)
Po zróżniczkowaniu powyższego wzoru względem czasu i uporządkowaniu wyra-
zów otrzymamy przyśpieszenie:
( )
(
)
( )
(
)
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
π
−
π
−
π
π
+
π
−
π
π
π
π
−
=
t
sin
e
r
t
sin
e
r
t
2
sin
4
e
t
sin
e
r
t
2
cos
2
4
e
+
t
cos
e
a
2
2
2
2
2
2
2
2
2
2
2
A
. (c)
Po podstawieniu do wzorów (b) i (c) t
1
= 0,5 s otrzymamy wartość prędkości
i przyśpieszenia dla tego czasu:
( )
( )
2
2
2
2
1
A
1
A
e
r
2
e
t
a
,
e
t
v
−
π
=
π
−
=
.
Wyszukiwarka
Podobne podstrony:
fizyka 2 KINEMATYKA PUNKTU MATERIALNEGO
4 Kinematyka punktu
2 Kinematyka punktu materialneg Nieznany
kinematyka punktu
3 Kinematyka punktu materialnego, FIZYKA
4. Kinematyka punktu
kinematyka punktu
3 Kinematyka punktu materialnego, AiR, semestr I, Mechanika Techniczna
Kinemat punktu id 234923 Nieznany
fiza, rozdz.3-Kinematyka punktu materialnego, 3
Kinemat, Kinematyka punktu
fizyka 2 KINEMATYKA PUNKTU MATERIALNEGO
Kinematyka punktu 1
2 Kinematyka punktu materialnego[2]
KINEMATYKA PUNKTU
kinematyka punktu
2 KINEMATYKA PUNKTU
więcej podobnych podstron