
Cyfrowe przetwarzanie sygnałów
Transformata Fouriera
z dyskretnym czasem (04)
Sławomir Kulesza
Wykład fakultatywny dla studentów
III r. spec. Informatyka ogólna
Rok akademicki 2012/2013

Transformata Fouriera
z dyskretnym czasem
●
Transformata Fouriera z dyskretnym czasem
(DTFT – Discrete-Time Fourier Transform) –
reprezentacja sygnału z dyskretnym czasem
postaci:
x [n] →
DTFT
X
(
e
j ω
)
=
∑
n=−∞
∞
x [n]e
−
j ω n
●
DTFT impulsu jednostkowego:
δ[
n] →
DTFT
X
(
e
j ω
)
=
∑
n=−∞
∞
δ[
n]e
−
j ω n
=
1

Odwrotna transformata Fouriera
z dyskretnym czasem
●
Odwrotna transformata Fouriera z dyskretnym
czasem (iDTFT – inverse Discrete-Time
Fourier Transform):
X
(
e
j ω
)
→
iDTFT
x [n]=
1
2 π
∫
−π
π
X
(
e
j ω
)
e
j ω n
d ω
●
Wzajemna równoważność transformat:
x [n]⇔
F
X
(
e
j ω
)

Własności DTFT
●
Okresowość:
●
Powyższa relacja opisuje zjawisko aliasingu w
dziedzinie częstości.
X
(
e
j (ω+2 π k )
)
=
X
(
e
j ω
)
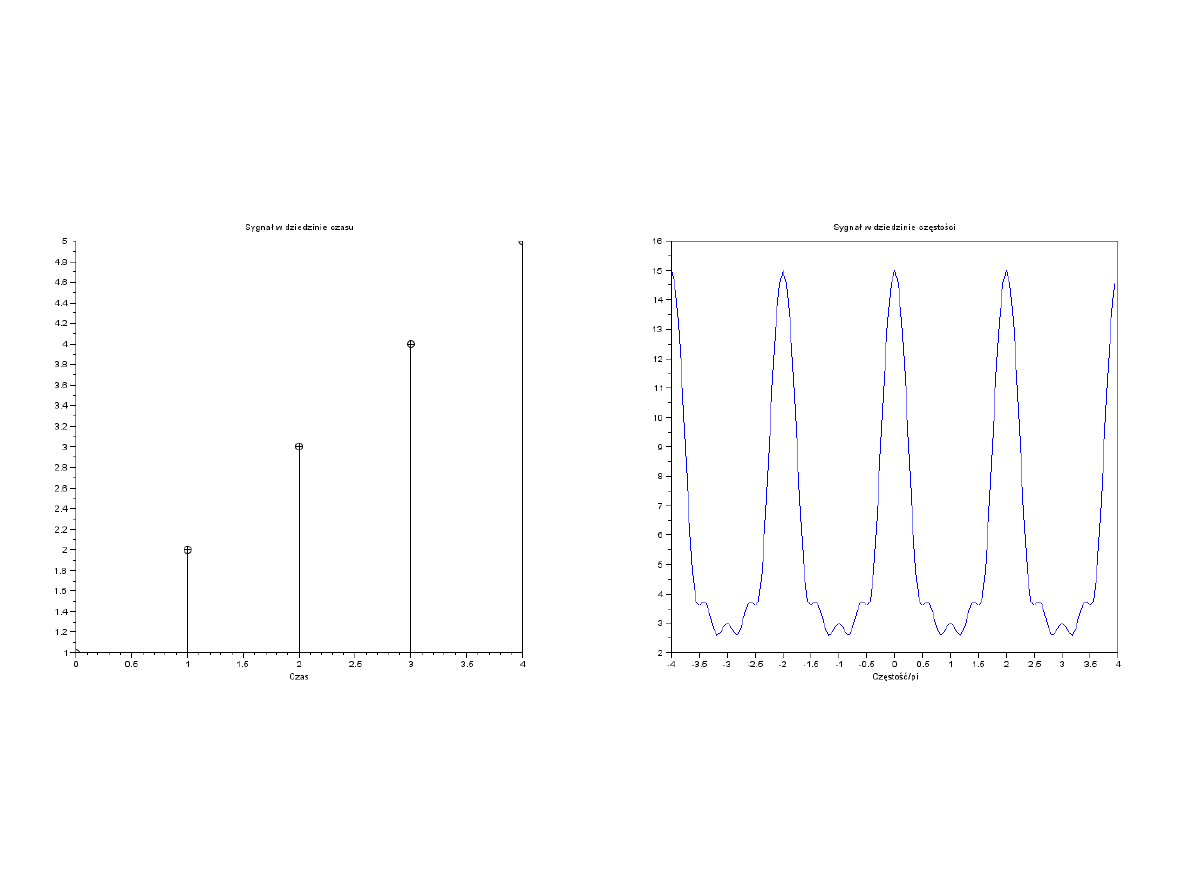
Aliasing w dziedzinie częstości
Widmo fourierowskie
●
DTFT w postaci wykładniczej:
X
(
e
j ω
)
=
∣
X
(
e
j ω
)
∣
e
j θ(ω)
Widmo amplitudowe
Widmo fazowe

Własności DTFT
●
DTFT sygnału zawiniętego:
●
DTFT sygnału sprzężonego:
F {x [−n]}= X
(
e
−
j ω
)
F {x ' [−n]}= X '
(
e
j ω
)
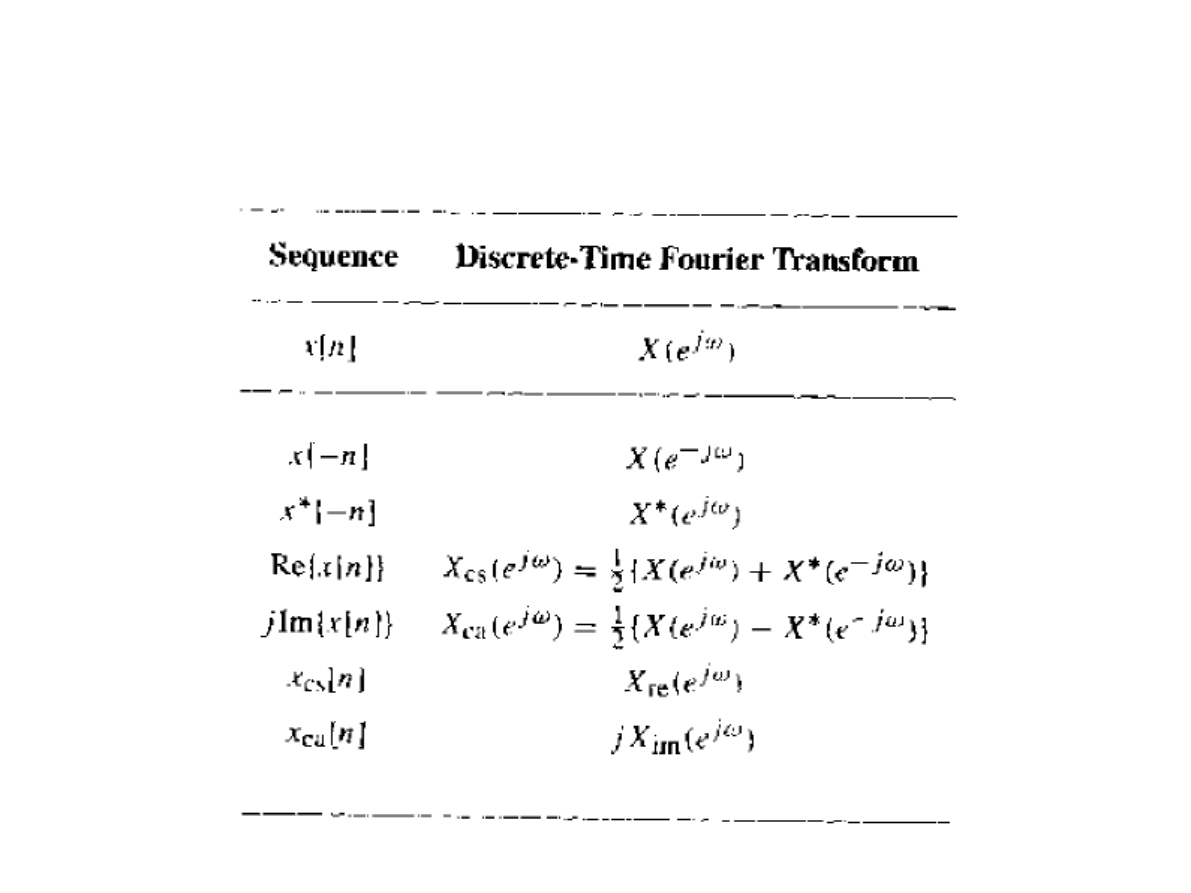
Symetria DTFT

Zbieżność DTFT
●
Transformata DTFT jest zbieżna (istnieje), gdy
sygnał x[n] jest bezwzględnie sumowalny:
∑
n=−∞
∞
∣
x [n]∣<∞
∣
X
(
e
j ω
)
∣
=
∣
∑
n=−∞
∞
x [n]e
−
j ω n
∣
≤
...
...≤
∑
n=−∞
∞
∣
x [n]∣
∣
e
−
j ω n
∣
≤
∑
n=−∞
∞
∣
x [n]∣<∞
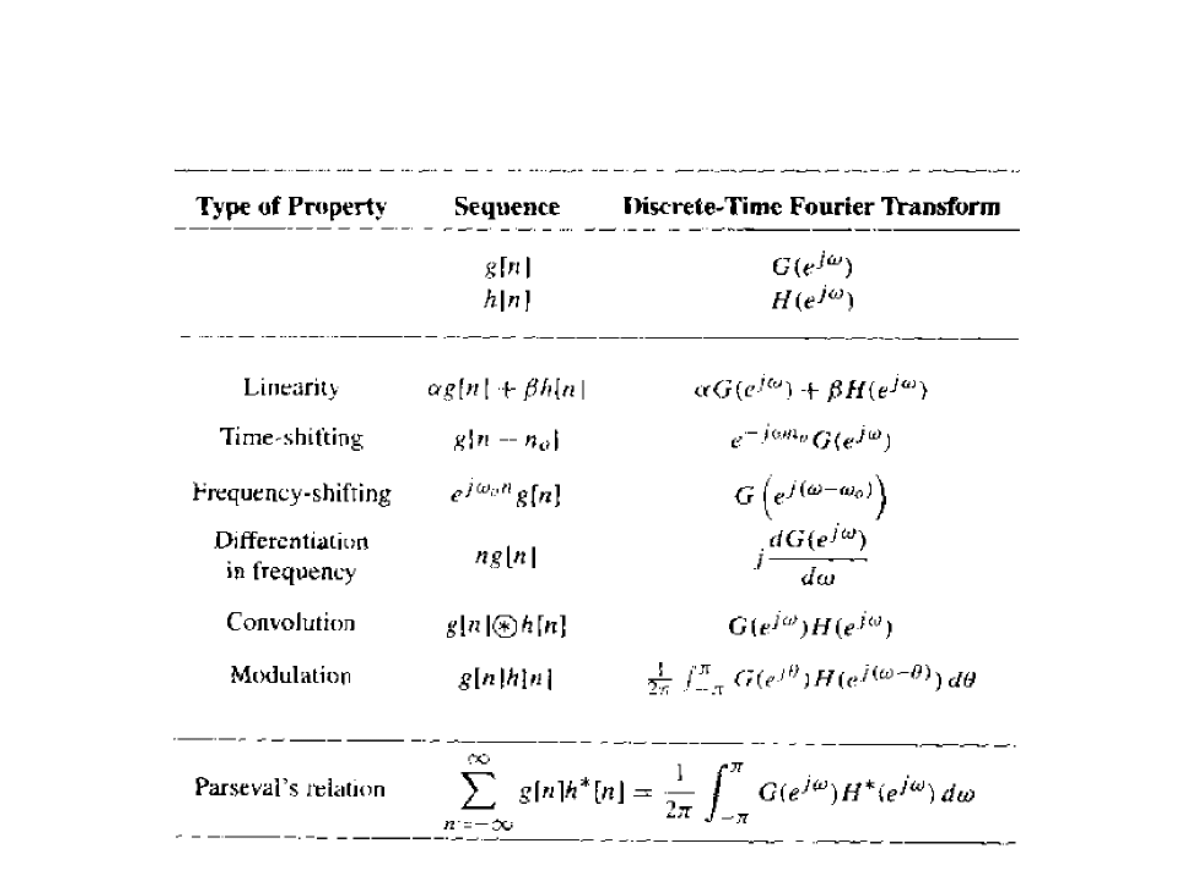
Własności DTFT

Odpowiedź częstotliwościowa
układów LTI z dyskretnym czasem
●
Wiele sygnałów można przedstawić jako
superpozycję sygnałów sinusoidalnych z
nieciągłym czasem. Odpowiedź dowolnego
układu LTI można zatem określić znając jego
odpowiedź na pojedynczy sygnał sinusoidalny.
●
Sygnał sinusoidalny można uogólnić jako
zespolony sygnał wykładniczy, stąd
zainteresowanie odpowiedzią układów LTI na
pobudzenie wykładnicze.

Funkcje własne układu LTI
●
Ważną cechą układów LTI jest istnienie
funkcji własnych (eigenfunctions).
Odpowiedź układu na pobudzenie funkcją
własną jest tożsama przemnożeniu tejże
funkcji przez pewną stałą (w ogólności:
zespoloną):
y [n]= ̃C⋅x [n]

Funkcje własne układów LTI
●
Niech pobudzenie układu jest zespolonym
sygnałem wykładniczym postaci:
●
Odpowiedź układu jest splotem pobudzenia i
odpowiedzi impulsowej:
x [n]=e
j ω n
, n∈ℤ
y [n]=
∑
k=−∞
∞
h[ k ] x [n−k ]=
∑
k=−∞
∞
h[ k ]e
j ω(n−k)
y [n]=
(
∑
k=−∞
∞
h[k ]e
−
j ω k
)
e
j ω n

Funkcje własne układów LTI
●
Ostatecznie:
●
Wykładniczy sygnał zespolony jest więc
funkcją własną układu LTI.
y [n]=H
(
e
j ω
)
e
j ω n

Odpowiedź częstotliwościowa
układu LTI
●
Odpowiedzią częstotliwościową (
frequency
response
) układu LTI jest wielkość:
●
Odpowiedź częstotliwościowa układu LTI jest
tożsama transformacie jego odpowiedzi
impulsowej i opisuje układ w domenie
częstotliwości.
H
(
e
j ω
)
=
∑
k=−∞
∞
h[k ]e
−
j ω k

Odpowiedź częstotliwościowa
●
Odpowiedź częstotliwościowa jest w ogólności
zespoloną funkcją częstości ω, zatem:
●
Lub w postaci wykładniczej:
H
(
e
j ω
)
=
H
ℜ
(
e
j ω
)
+
j H
ℑ
(
e
j ω
)
H
(
e
j ω
)
=
∣
H
(
e
j ω
)
∣
e
j θ(ω)
Odpowiedź amplitudowa i fazowa
●
Odpowiedź amplitudowa (magnitude
response) układu LTI to moduł odpowiedzi
częstotliwościowej:
●
Odpowiedź fazowa (phase response) to kąt
fazowy odpowiedzi częstotliwościowej:
∣
H
(
e
j ω
)
∣
=
√
H
ℜ
2
(
e
j ω
)+
H
ℑ
2
(
e
j ω
)
θ(ω)=
atan
(
H
ℑ
(
e
j ω
)
H
ℜ
(
e
j ω
)
)

Wzmocnienie układu
●
Do celów projektowych często łatwiej
posługiwać się odpowiedzią amplitudową
układu wyrażoną w [dB]:
●
Funkcja G opisuje wzmocnienie układu (gain
function).
●
Funkcja: A = -G opisuje tłumienie układu
(attenuation function)
G
(
ω
)
=
20 log
10
∣
H (e
j ω
)
∣

Opis układów LTI w dziedzinie
częstości
●
Niech dane są sygnały z nieciągłym czasem:
x[n] (pobudzenie) oraz y[n] (odpowiedź układu
LTI), oraz ich transformaty dtft.
●
Ponieważ odpowiedź układu w dziedzinie
czasu jest splotem:
y [n]= x [n]⊗h[n]
●
Odpowiedź układu w dziedzinie częstości jest
iloczynem transformat dtft
:
Y
(
e
j ω
)
=
F
(
y [n]
)
=
X
(
e
j ω
)
⋅
H
(
e
j ω
)

Opis układów LTI w dziedzinie
częstości
●
Wynika stąd, że:
●
Odpowiedź częstotliwościowa wynosi więc:
Y
(
e
j ω
)
=
X
(
e
j ω
)
⋅
H
(
e
j ω
)
H
(
e
j ω
)
=
Y
(
e
j ω
)
X
(
e
j ω
)

Odpowiedź częstotliwościowa
układu FIR
●
Odpowiedź układów FIR w dziedzinie czasu
ma postać:
●
Odpowiedź częstotliwościowa ma wówczas
postać:
y [n]=
∑
k=N
1
N
2
h[k ] x [n−k ]
H
(
e
j ω
)
=
∑
k=N
1
N
2
h[ k ]e
−
j ω k

Odpowiedź częstotliwościowa
układu IIR
●
Odpowiedź układów IIR w dziedzinie czasu
ma postać:
●
W dziedzinie częstości otrzymujemy wówczas:
∑
k=0
N
a
k
y [n−k ]=
∑
k=0
M
b
k
x [n−k ]
∑
k=0
N
a
k
e
−
j ω k
Y (e
j ω
)=
∑
k=0
M
b
k
e
−
j ω k
X (e
j ω
)
Odpowiedź częstotliwościowa
układu IIR
●
Ostatecznie odpowiedź układów IIR w
dziedzinie częstości jest funkcją wymierną:
H (e
j ω
)=
Y (e
j ω
)
X (e
j ω
)
=
∑
k=0
M
b
k
e
−
j ω k
∑
k=0
N
a
k
e
−
j ω k

Odpowiedź przejściowa układów LTI
●
Odpowiedź układu LTI opisywanego LCCDE
składa się z dwóch części: rozwiązania
jednorodnego y
c
[n] oraz szczególnego y
p
[n].
●
Odpowiedź jednorodna jest wielomianem
postaci:
gdzie: λ
k
są pierwiastkami wielomianu
charakterystycznego
y
c
[
n]=
∑
k=1
N
α
k
λ
k
n

Odpowiedź przejściowa układu LTI
●
Aby układ był stabilny, wszystkie pierwiastki
wielomianu charakterystycznego muszą
spełniać warunek:
Sprawia on, że y
c
[n] zanika z czasem do zera.
●
Rozwiązanie jednorodne jest także nazywane
odpowiedzią przejściową (transient
response) układu LTI.
∣
λ
k
∣
<
1, k =1, 2, ... N

Odpowiedź przejściowa a
stacjonarna układów LTI
●
Odpowiedź układu LTI na pobudzenie sygnałem
przyczynowym (n > n
0
) w postaci sygnału
sinusoidalnego z czasem dyskretnym o stałej
amplitudzie będzie składać się z dwóch części:
●
Odpowiedzi stacjonarnej (steady-state
response), będącej sygnałem sinusoidalnym o
stałej amplitudzie i tej samej częstości, co
pobudzenie
●
Odpowiedzi przejściowej (transient response),
będącej sygnałem zanikającym do zera po
czasie n
1
> n
0
.

Odpowiedź stacjonarna
●
Niech układ LTI jest pobudzany sygnałem
obustronnym:
●
Wówczas odpowiedź układu ma postać:
x [n]= A cos(ω
0
n)
y [n]= A
∣
H (e
j ω
0
)
∣
cos(ω
0
n+θ(ω
0
))
y [n]= A
∣
H (e
j 0
)
∣
●
Stąd, odpowiedź stacjonarna ma postać:

Odpowiedź stacjonarna
●
Niech układ jest pobudzany sygnałem
przyczynowym, wykładniczym postaci:
●
Odpowiedź stacjonarna ma wówczas postać:
●
Odpowiedź przejściowa ma z kolei postać:
x [n]=e
j ω n
μ [
n]
y
st
[
n]=H (e
j ω
)
e
j ω n
y
tr
[
n]=−
(
∑
k =n+1
∞
h[k ]e
−
j ω k
)
e
j ω n
Filtrowanie sygnałów
●
Podstawowym zadaniem układów LTI jest
filtrowanie sygnałów, czyli selektywne
przenoszenie różnych składowych
częstotliwościowych sygnału pobudzającego.
●
Idea filtracji zasadza się na doborze
współczynników odpowiedzi amplitudowej,
odpowiadających składowym sinusoidalnym
występującym w sygnale wejściowym.

Idealny filtr LTI
●
Rozważmy idealny filtr LTI z dyskretnym
czasem opisywany odpowiedzią amplitudową
postaci:
●
Niech pobudzenie ma postać:
∣
H (e
j ω
)
∣
=
{
1⇔0≤∣ω∣≤ω
c
0⇔ω
c
≤∣ω∣≤π
x [n]= A cos(ω
1
n)+ B cos(ω
2
n)

Idealny filtr LTI
●
Z uwagi na liniowość, odpowiedź układu ma
postać:
●
Korzystając ze znajomości odpowiedzi
amplitudowej, dostajemy ostatecznie:
Układ zachowuje się jak filtr dolnoprzepustowy
y [n]= A
∣
H (e
j ω
1
)
∣
cos(ω
1
n+θ(ω
1
))+
...
B
∣
H (e
j ω
2
)
∣
cos(ω
2
n+θ(ω
2
))
y [n]≈ A
∣
H (e
j ω
1
)
∣
cos(ω
1
n+θ(ω
1
))
Filtrowanie sygnałów

Projekt prostego filtra FIR (HP)
●
Załóżmy, że dany jest sygnał sinusoidalny
postaci:
●
Szukamy współczynników odpowiedzi
impulsowej symetrycznego, 3-punktowego
filtra FIR o charakterystyce
dolnoprzepustowej:
x [n]=cos(0.1 n)+cos(0.4 n)
h[n]=[α
↑ 1
,α
2,
α
1
]

Projekt prostego filtra FIR (HP)
●
Należy wybrać takie współczynniki odpowiedzi
impulsowej h[n], aby odpowiedź układu na
zadane pobudzenie zawierała wyłącznie
składową o częstości ω
2
=0.4
●
Odpowiedź częstotliwościową można wyrazić
jako:
●
Odpowiedź amplitudowa ma postać:
H (e
j ω
)=
(
2 α
1
cos(ω)+α
2
)
e
−
j ω
∣
H (e
j ω
)
∣
=
2 α
1
cos(ω)+α
2
Projekt prostego filtra FIR (HP)
●
Znając współczynniki odpowiedzi
amplitudowej:
●
Rozwiązujemy układ równań:
●
Którego rozwiązaniem jest:
∣
H (e
j ω
)
∣
=
{
0⇔ω=0.1
1⇔ω=0.4
{
2α
1
cos(0.1)+α
2
=
0
2 α
1
cos(0.4)+α
2
=
1
α
1
≈−
6.762 , α
2
≈
13.456
Projekt prostego filtra FIR (HP)
●
Ostatecznie, odpowiedź impulsowa ma
postać:
h[n]=[−6.762
↑
,13.456 ,−6.762]
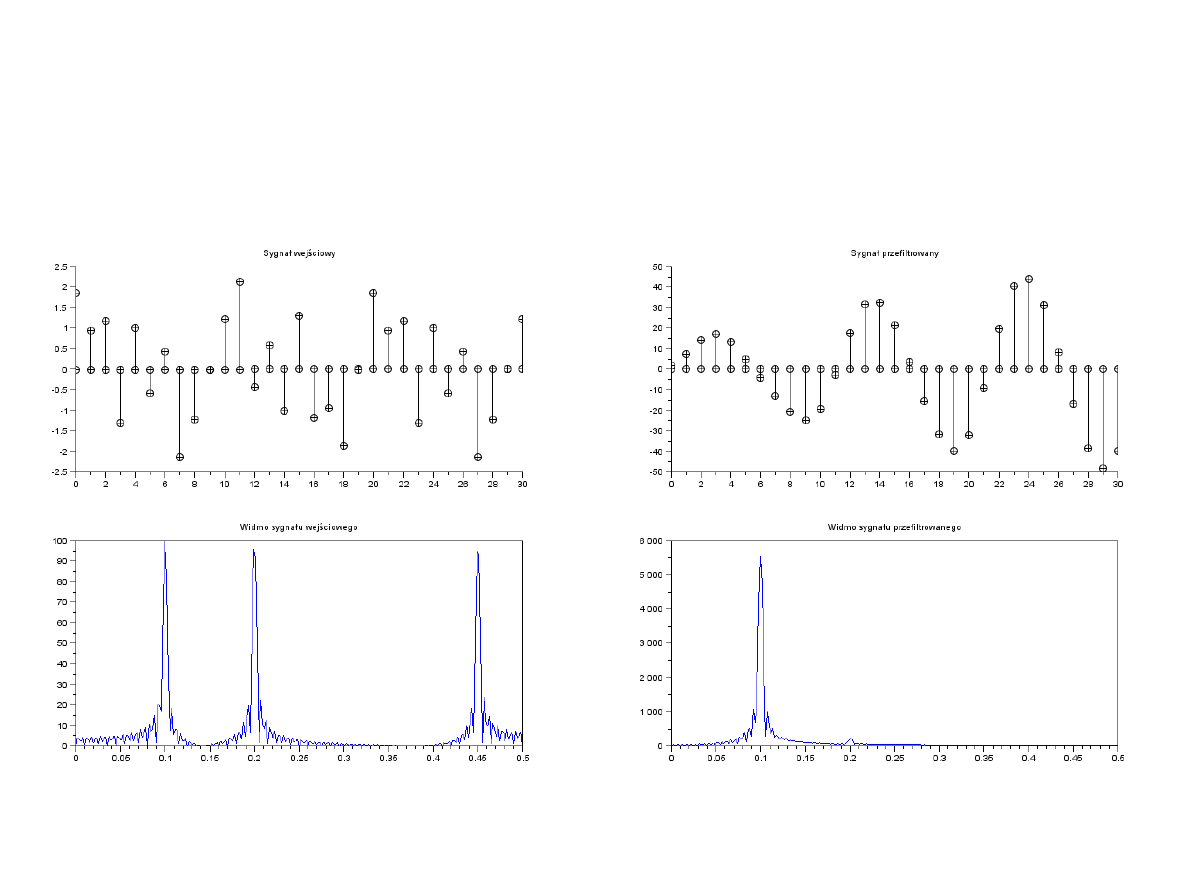
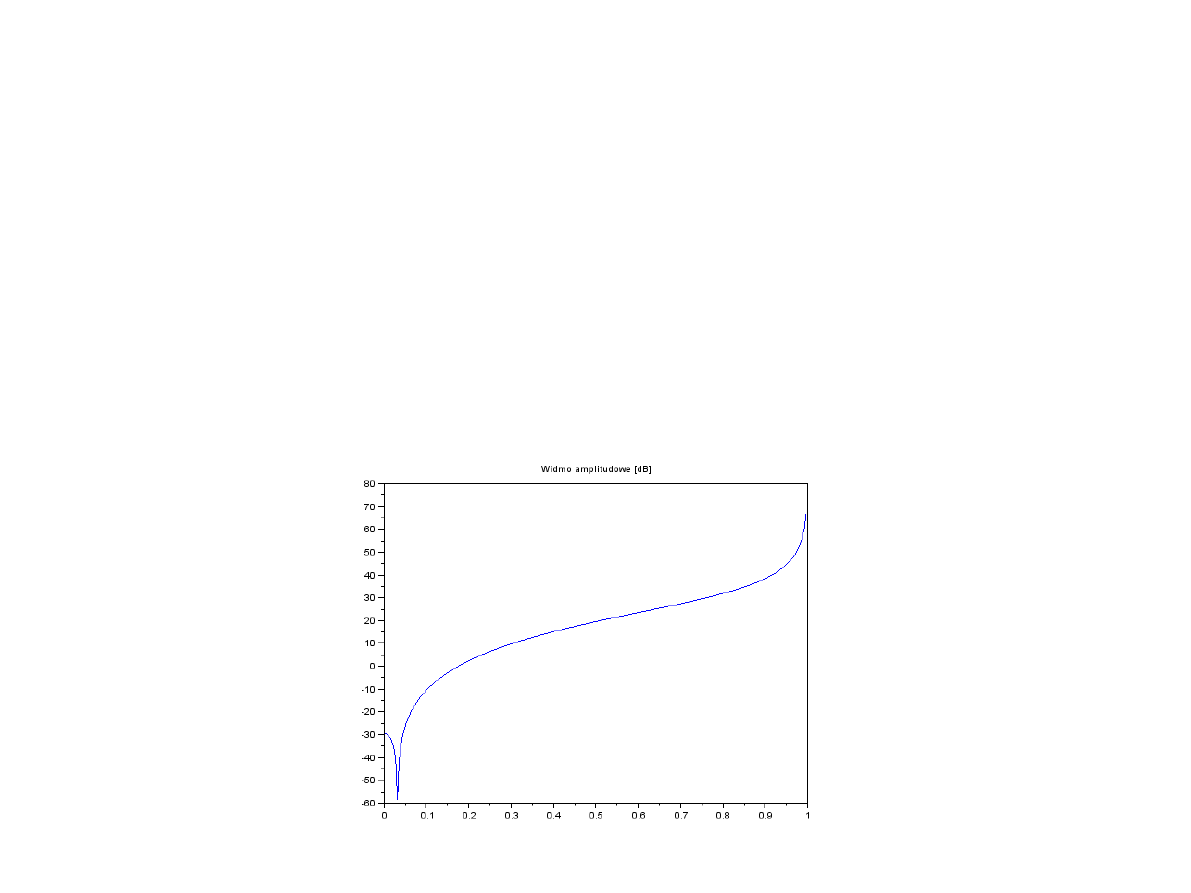
Filtracja HP sygnału

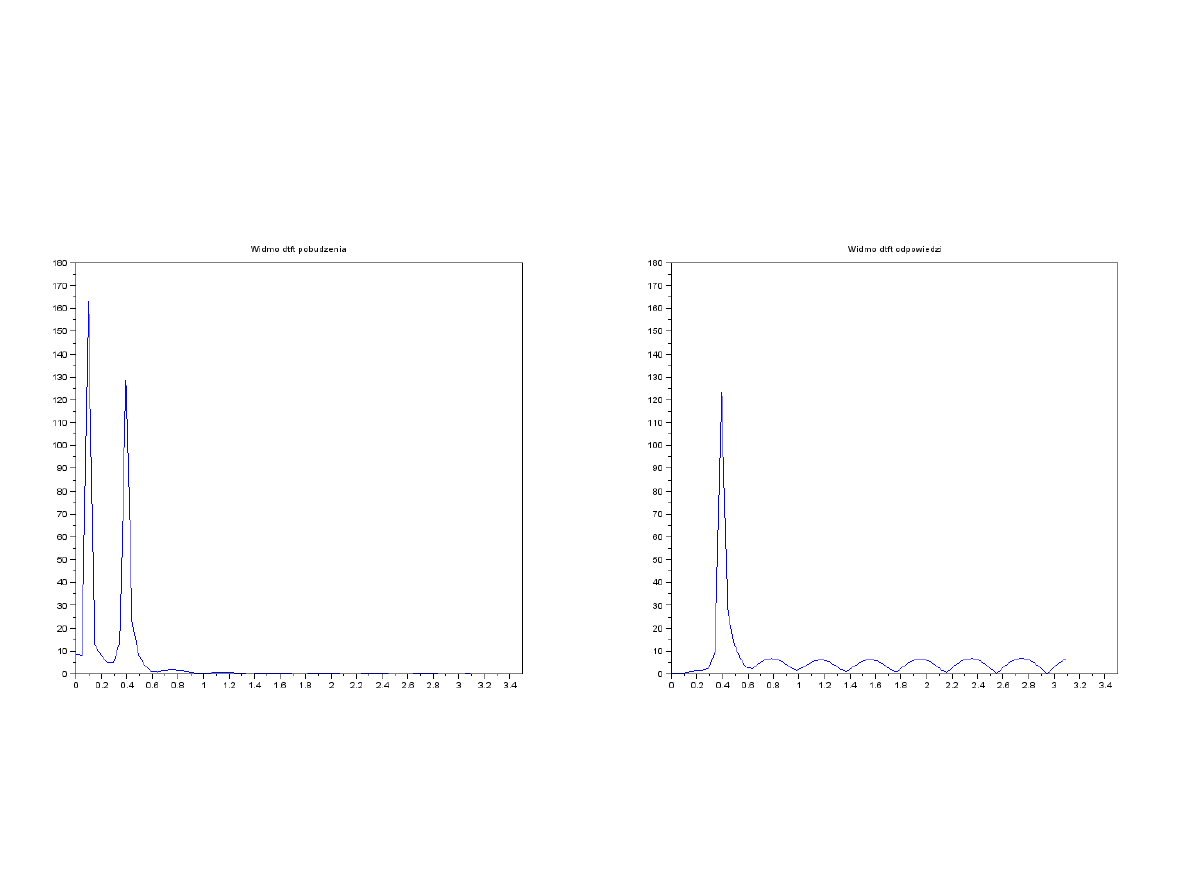
Projekt prostego filtra FIR (LP)
●
Postępując analogicznie zaprojektujmy 3-
punktowy, symetryczny filtr FIR
dolnoprzepustowy LP.
●
Odpowiednie współczynniki odpowiedzi
impulsowej wynoszą:
α
1
≈
6.762 , α
2
≈−
12.456
h[n]=[6.762
↑
,−12.456 , 6.762]
Filtracja LP sygnału
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
- Slajd 33
- Slajd 34
- Slajd 35
- Slajd 36
- Slajd 37
- Slajd 38
- Slajd 39
Wyszukiwarka
Podobne podstrony:
DSP Wyk%b3ad 04 UWM
DSP Wyk%b3ad 04 UWM
Wykład 04
04 22 PAROTITE EPIDEMICA
04 Zabezpieczenia silnikówid 5252 ppt
Wyklad 04
Wyklad 04 2014 2015
04 WdK
04) Kod genetyczny i białka (wykład 4)
2009 04 08 POZ 06id 26791 ppt
2Ca 29 04 2015 WYCENA GARAŻU W KOSZTOWEJ
04 LOG M Informatyzacja log
04 Liczby ujemne i ułamki w systemie binarnym
UE i ochrona srodowiska 3 04 2011
więcej podobnych podstron