
Sławomir Kulesza
Cyfrowe przetwarzanie sygnałów (4)
Wykład dla studentów I roku (N)SMU WMiI
Specjalność: Techniki multimedialne

Układy czasu dyskretnego – filtry cyfrowe
Zadaniem układów czasu dyskretnego (Discrete-Time Systems – DTS) jest
przetworzenie danego ciągu wejściowego x[n] na odpowiedni ciąg wyjściowy y[n].
Układ realizujący taką operację (przekształcenie T) może być zarówno układem
sprzętowym, jak i algorytmem programowym:
y [n]≡T x [n]
W praktyce DSP wszystkie sygnały są cyfrowe, więc operacje na nich również
dają sygnały cyfrowe. Układy realizujące operacje na sygnałach cyfrowych
nazywa się filtrami cyfrowymi.
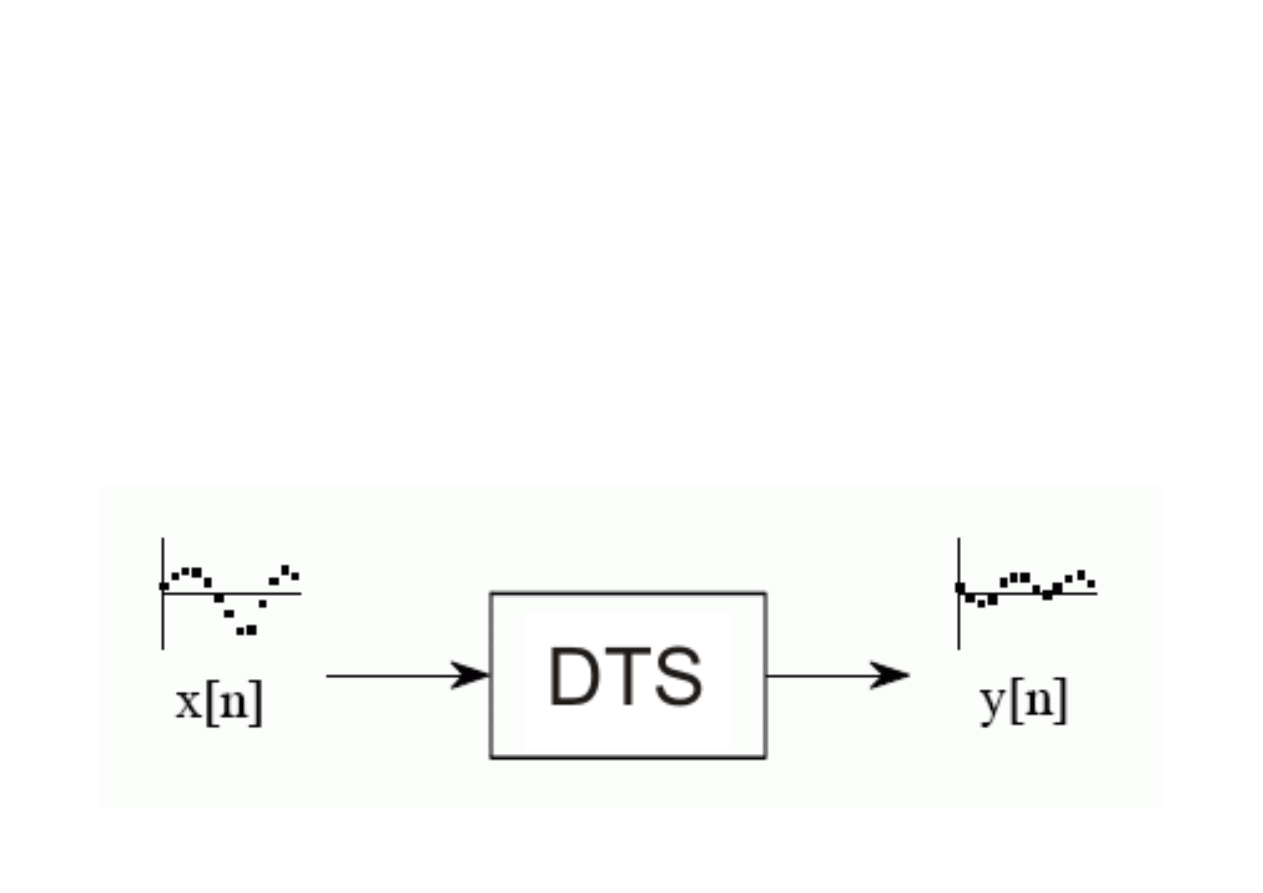
Charakterystyka wejściowo-wyjściowa DTS
Charakterystyka wejściowo-wyjściowa układów czasu dyskretnego zawiera jawną
matematyczną definicję zależności pomiędzy ciągiem wejściowym (pobudzeniem
układu) a wyjściowym (odpowiedzią układu). Pomija się przy tym całkowicie
wewnętrzną strukturę układu, co powoduje, że stanowi on dla użytkownika
'czarną skrzynkę'.

Przykłady charakterystyk I/O układów czasu dyskretnego
Znając pobudzenie x[n] postaci:
x [n]=
{
∣
n∣⇔∣n∣≤3
0⇔∣n∣3
}
Wyznacz odpowiedź następujących układów czasu dyskretnego:
–
y[n] = x[n] – układ tożsamościowy,
–
y[n] = x[n-1] – układ opóźniający,
–
y[n] = x[n+1] – układ przyspieszający,
–
y[n] = (x[n-1] + x[n] + x[n+1])/3 – układ uśredniający,
–
y[n] = max(x[n-1], x[n], x[n+1]) – dyskryminator (selektor),
–
y [n]=
∑
k =−∞
n
x [n]=x [n]x [n−1]x [n−2]... – akumulator.

Reprezentacja blokowa układów czasu dyskretnego
Diagram blokowy układu czasu dyskretnego zawiera elementarne bloki
funkcjonalne połączone siecią zależności odpowiednio do wykonywanej operacji.
Do bloków elementarnych zalicza się:
–
sumator,
–
wzmacniacz,
–
układ mnożący (modulator),
–
układ opóźniający,
–
układ przyspieszający,
–
rozdzielacz.
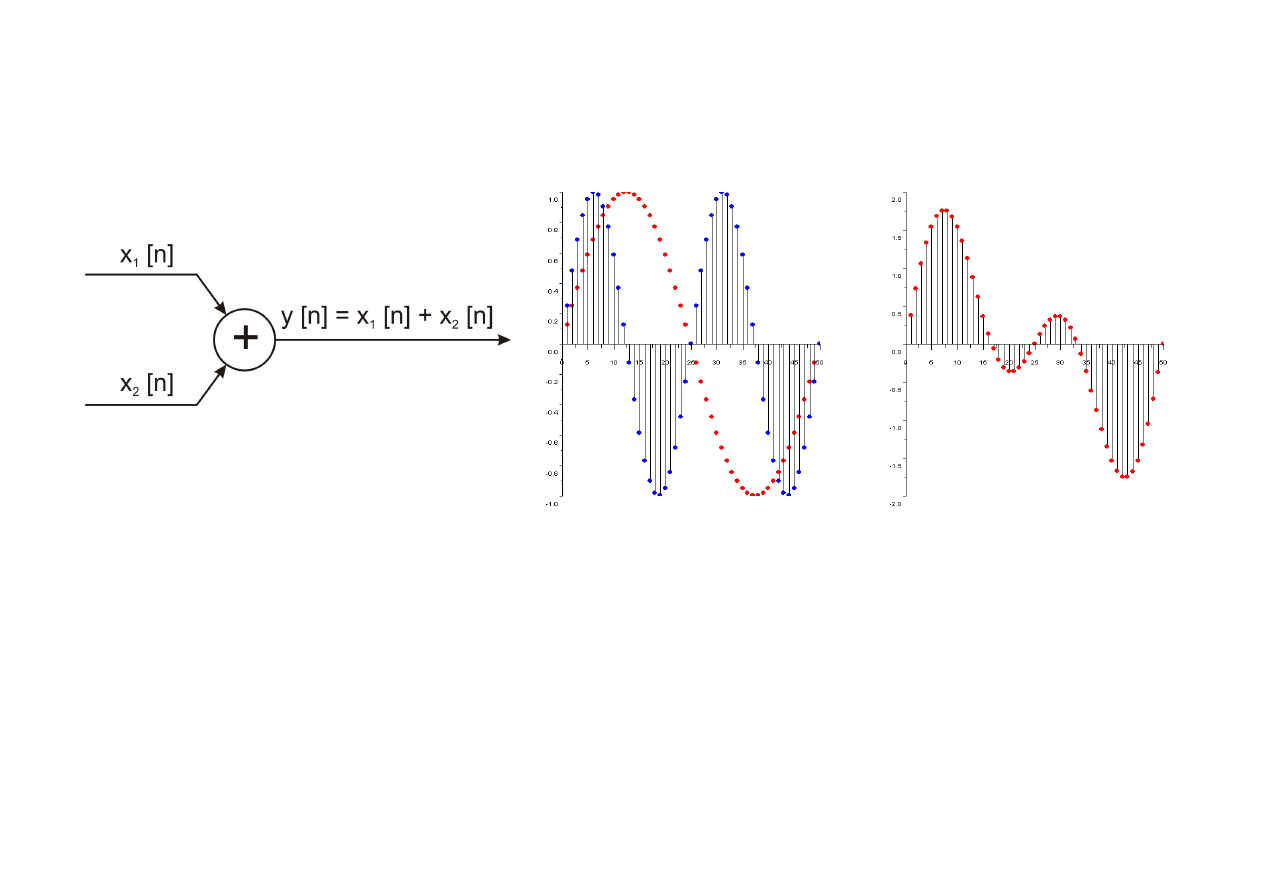
Sumator
Sumator realizuje operację dodawania dwóch ciągów:
y [n]= x
1
[
n]x
2
[
n]
Ponieważ do przeprowadzenia tej operacji wymagane są wyłącznie bieżące
próbki ciągów, układ jest bezpamięciowy.
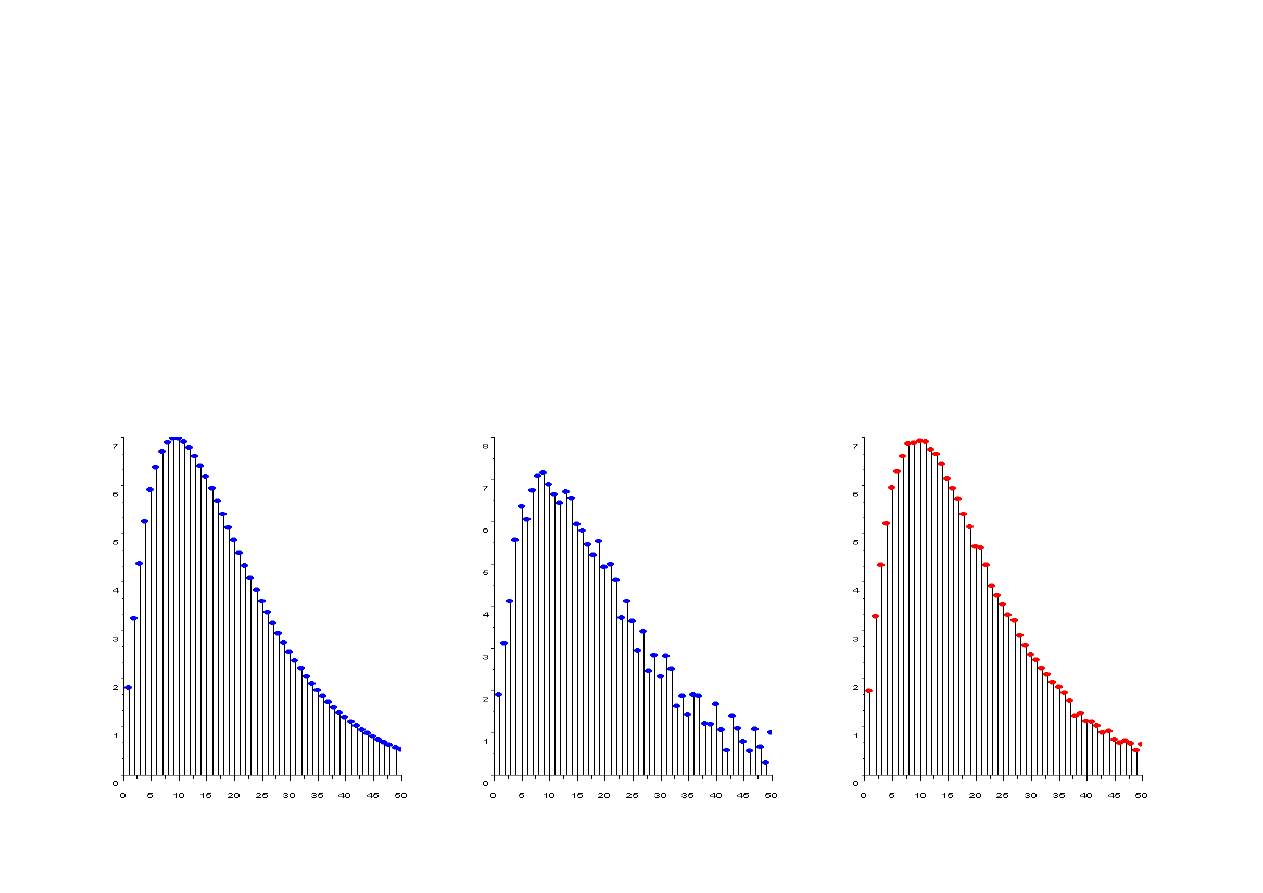
Zastosowania sumatora – odszumianie sygnału
Jednym z najprostszych zastosowań sumatora jest odszumianie sygnału metodą
wielokrotnego uśredniania. Wykorzystuje się przy tym fakt, iż przy wielokrotnych
pomiarach tego samego sygnału, sygnał użyteczny nie zmienia się w czasie,
podczas gdy sygnał szumu ulega losowym fluktuacjom i jego średnia wartość
w długim czasie wynosi 0.
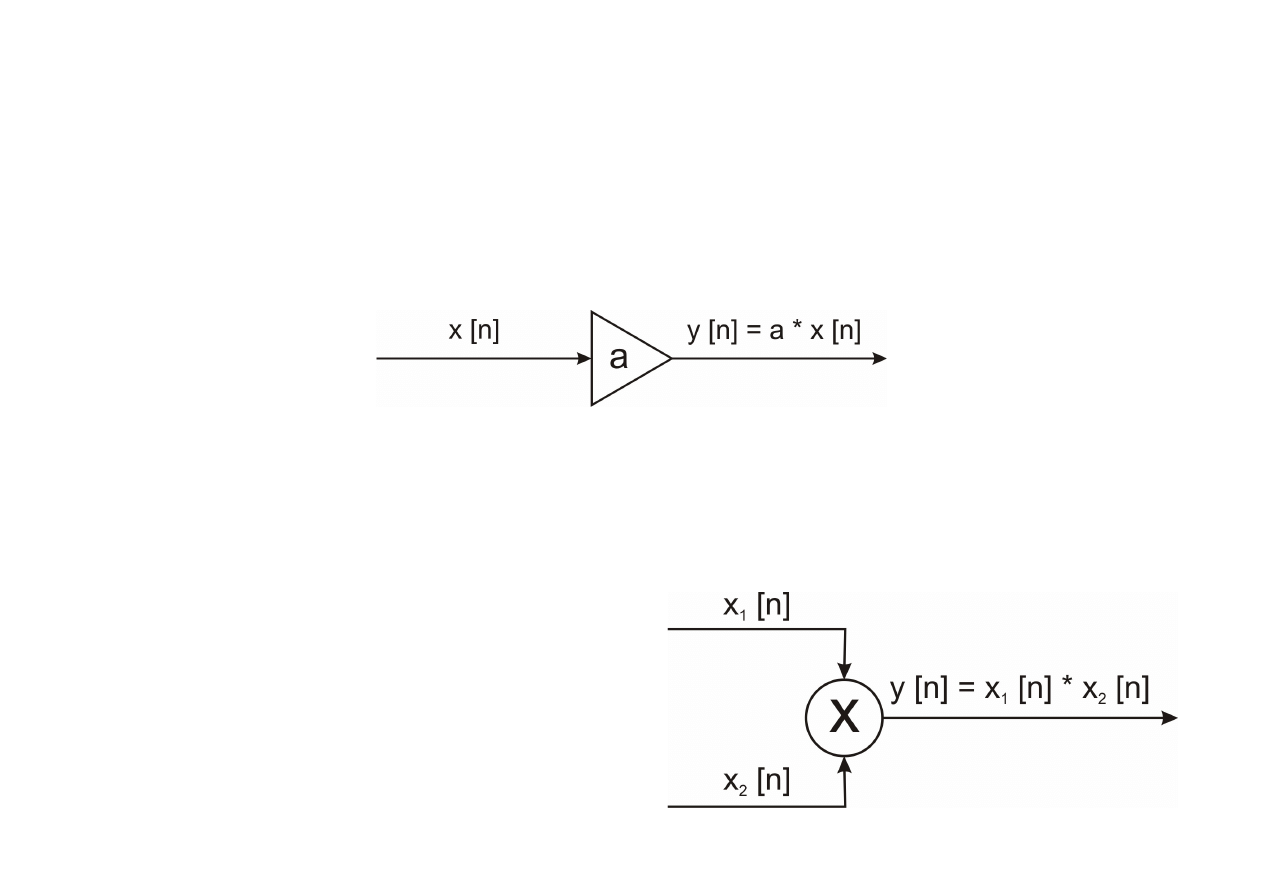
Wzmacniacz
Wzmacniacz jest bezpamięciowym układem realizującym operację skalowania
wartości próbek o stały czynnik a:
y [n]=a⋅x [n]
Układ mnożący (modulator)
Bezpamięciowy układ realizujący operację mnożenia wartości próbek ciągów
wejściowych:
y [n]=x
1
[
n]⋅x
2
[
n]
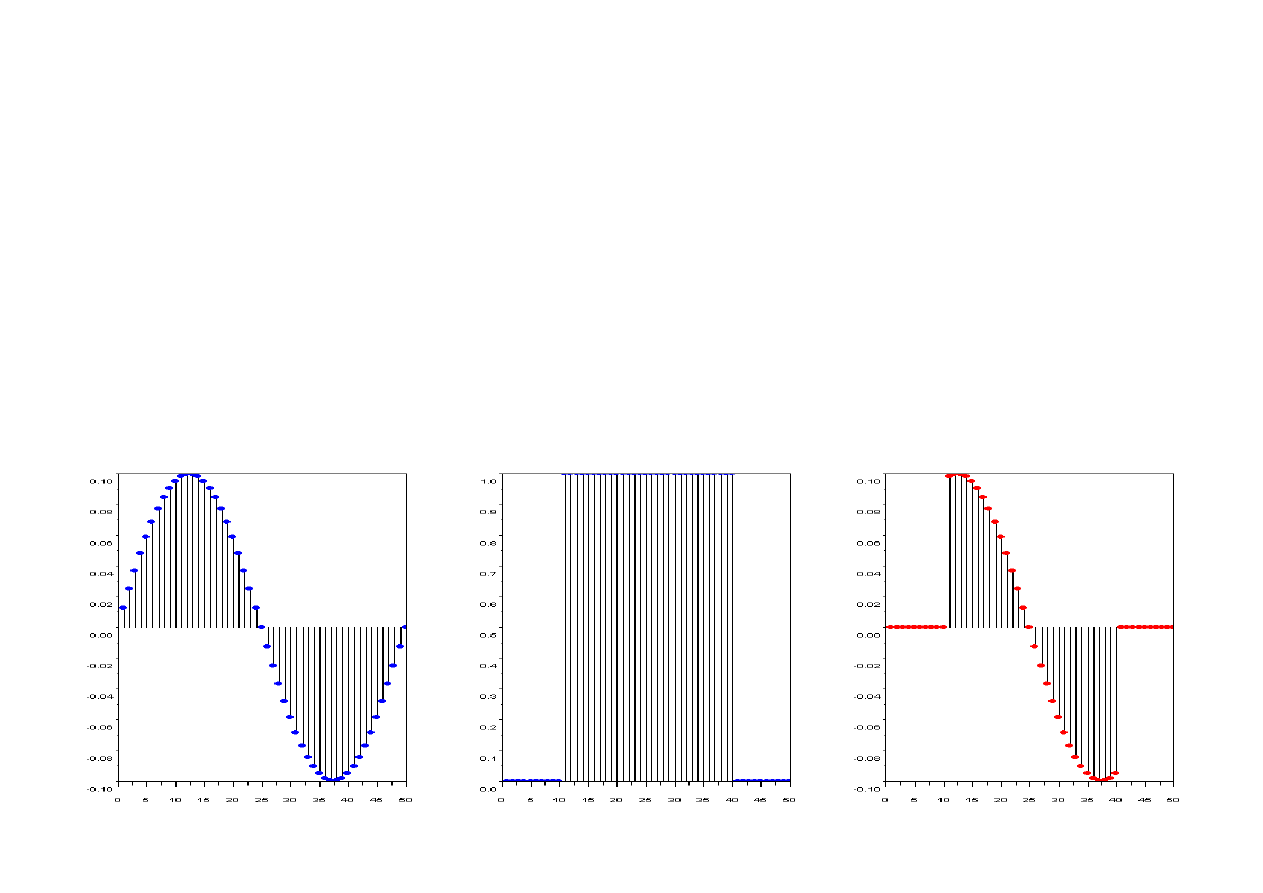
Zastosowania układu mnożącego – okienkowanie sygnału
Układy mnożące wykorzystuje się m.in. do tworzenia skończonych ciągów
sygnałów z ciągów nieskończonych na drodze mnożenia tych ostatnich przez ciąg
nazywany funkcją okna. Proces ten, zwany okienkowaniem (windowing),
odgrywa istotną rolę przy projektowaniu pewnych typów filtrów cyfrowych.
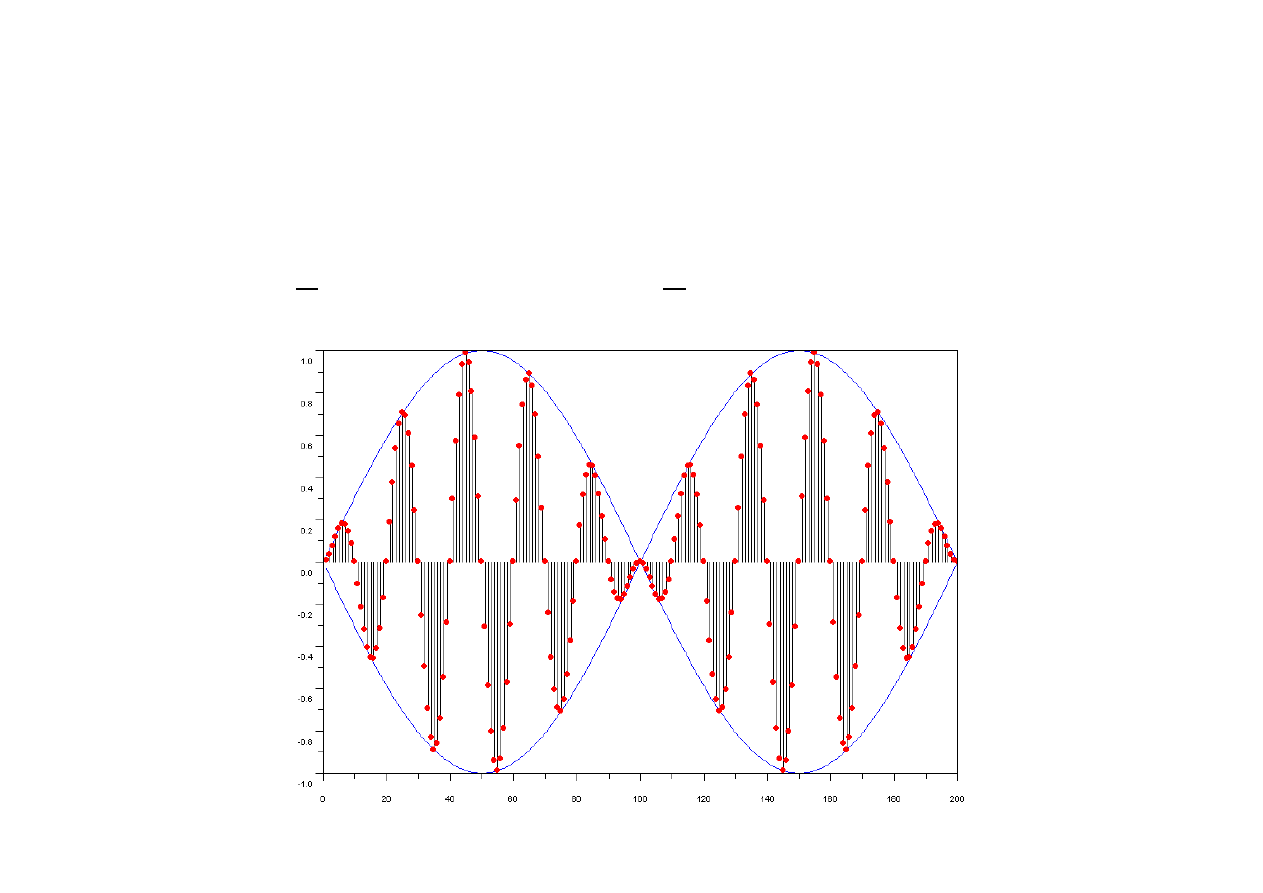
Zastosowania układu mnożącego – modulacja AM
Układ mnożący dwa wejściowe ciągi sinusoidalne wytwarza ciąg y[n] taki, że:
y [n]= x
1
[
n]⋅x
2
[
n]=cos2⋅⋅f
1
⋅
n⋅cos2⋅⋅f
2
⋅
n=...
...
1
2
cos2⋅⋅ f
1
f
2
⋅
n
1
2
cos2⋅⋅ f
1
−
f
2
⋅
n
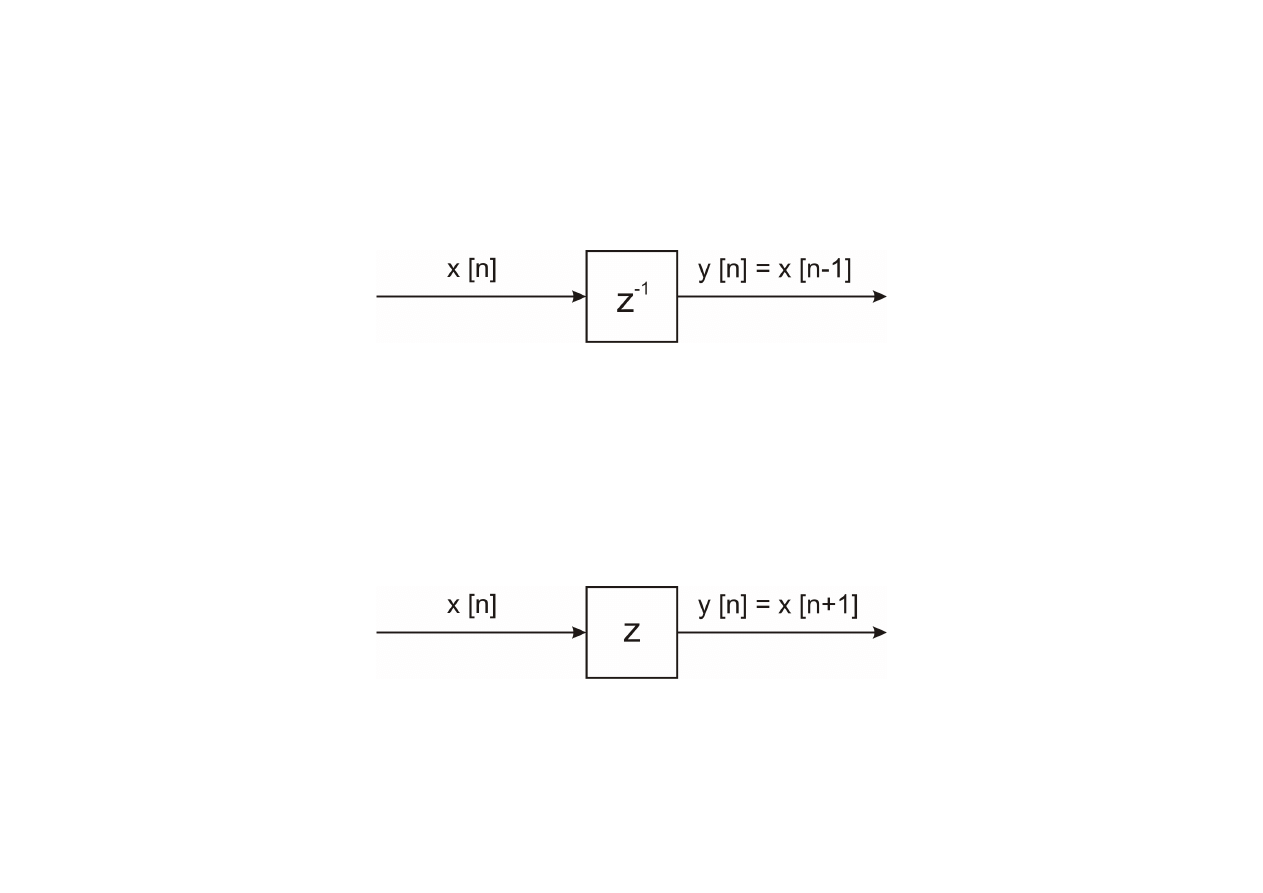
Układ opóźniający
Układ z pamięcią (rejestrem przesuwającym), który opóźnia ciąg wejściowy
o jedną próbkę, tzn.: y [n] = x [n-1].
Układ przyspieszający
Układ z pamięcią (rejestrem przesuwającym), który przyspiesza ciąg wejściowy
o jedną próbkę, tzn.: y [n] = x [n+1].
Przyspieszenie sygnału w czasie oznacza w istocie wcześniejsze zapisanie go
w całości i przywoływanie z pamięci w celu wykonania operacji.
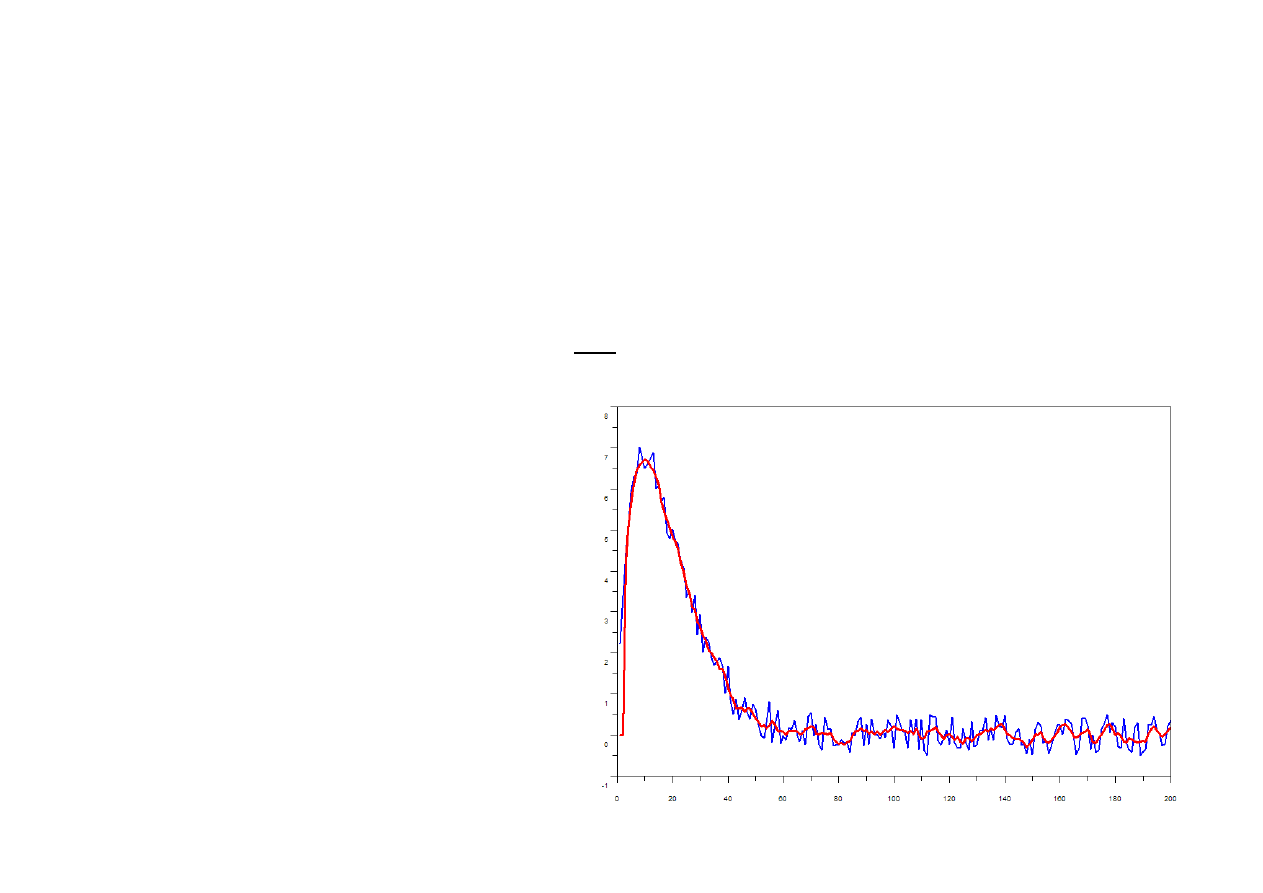
Zastosowania układów przesuwających – filtry biegnące
W przypadkach, gdy w celu wyeliminowania szumów nie można wielokrotnie
powtarzać pomiarów, do wygładzania przebiegów stosuje się filtry biegnące,
których zadaniem jest uśrednianie wartości M-sąsiednich próbek sygnału:
y [n]=
1
M
∑
k=0
M
x [n−k ]
Wygładzenie przebiegu zaszumionego
po zastosowaniu 5-punktowego filtru
biegnącego z układami
przesuwającymi.
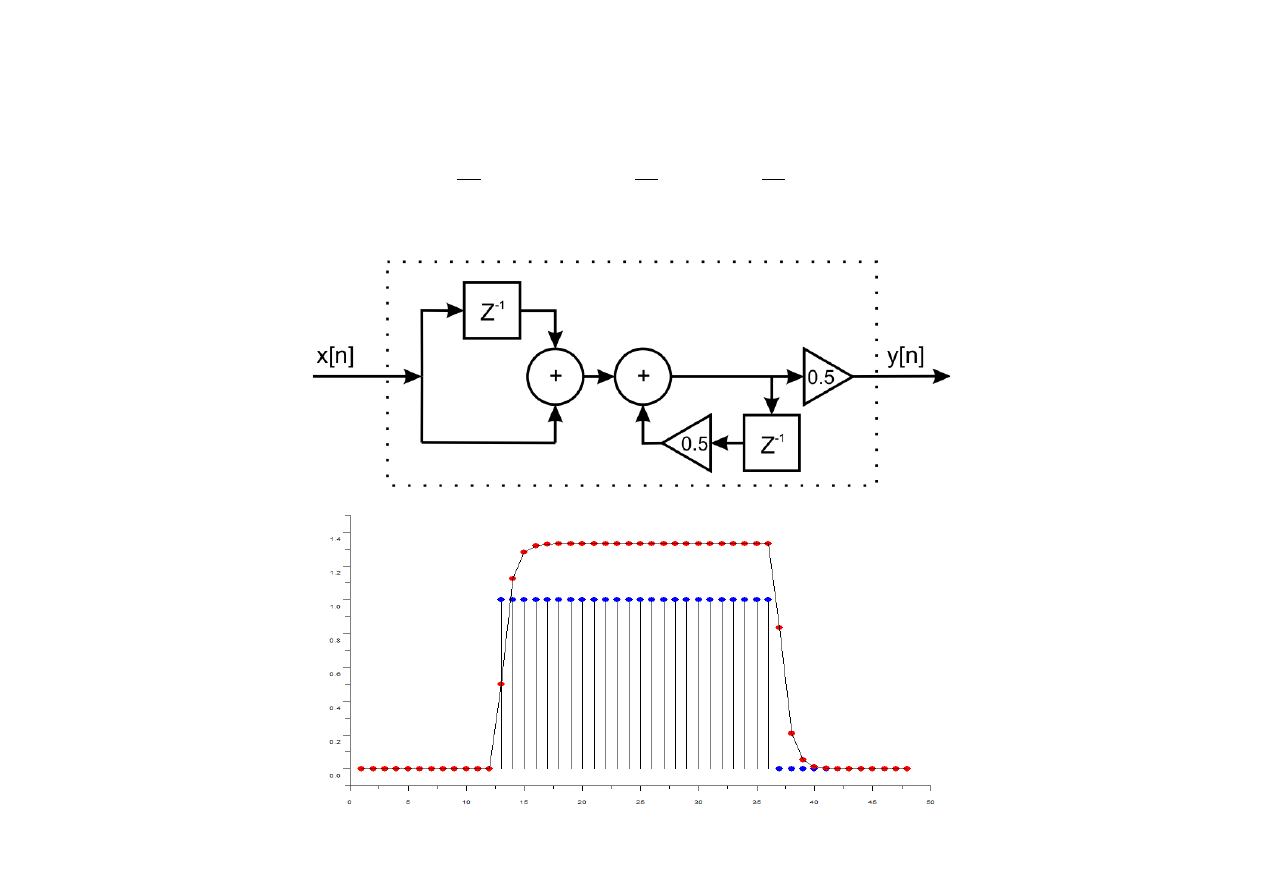
Ex.: Zbudować diagram blokowy układu czasu dyskretnego opisanego relacją:
y [n]=
1
4
y [n−1]
1
2
x [n]
1
2
x [n−1]

Klasyfikacja układów czasu dyskretnego
Do analizy i projektowania układów przetwarzania sygnału przydatny jest wstępny
podział według ogólnych własności, jakie te układy wykazują, bowiem silnie
rzutuje to na metody ich modelowania matematycznego.
W dalszym ciągu analizowane będą wyłącznie układu, których charakterystyki nie
zależą od wyboru sygnału wejściowego. Wystarczy zatem, że dana własność
układu nie jest spełniona dla pewnego sygnału, aby twierdzić, że układ ten nie
posiada tejże własności.

Układy statyczne i dynamiczne
Układ czasu dyskretnego nazywany jest statycznym (bezpamięciowym), jeśli
wartość dowolnej próbki n sygnału wyjściowego zależy wyłącznie od wartości
próbki sygnału wejściowego o tym samym indeksie:
y [n]=T n , x [n]
Układy statyczne nie wymagają zatem elementów opóźniających.
Z drugiej strony, układ jest dynamiczny (z pamięcią), jeśli stan jego wyjścia
w chwili n jest całkowicie opisany przez próbki sygnału wejściowego z przedziału
(n-N, n):
y [n]=T n , x n−N , x n−N 1 ,... x n , N ≥0
Wartość N określa wielkość pamięci:
–
jeśli
0≤ N ∞
, to układ posiada skończoną pamięć o rozmiarze N,
–
jeśli
N =∞
, to układ posiada pamięć nieskończoną.

Układy niezmiennicze względem czasu
Układ jest niezmienniczy względem czasu (time-invariant TI) wtedy i tylko
wtedy, gdy jego charakterystyka I/O nie zmienia się w czasie, tzn. odpowiedź
układu na określone pobudzenie nie zależy od przesunięcia sygnału wejściowego
w czasie:
∀
k ∈ℤ
∀
{
x [n]}
y [n]=T x [n]
⇒
y [n−k ]=T x [n−k ]
Powyższa definicja specyfikuje test na niezmienniczość układu w czasie:
obliczamy odpowiedź układu y[n,k] na pobudzenie przesunięte w czasie x[n-k],
obliczamy przesuniętą odpowiedź y[n-k] i sprawdzamy, czy y[n,k] = y[n-k] dla
wszystkich możliwych wartości k. Jeśli tak, układ jest niezmienniczy w czasie, jeśli
nie – układ nie jest niezmienniczy (Time-Variant TV).
Przykłady układów TI oraz TV
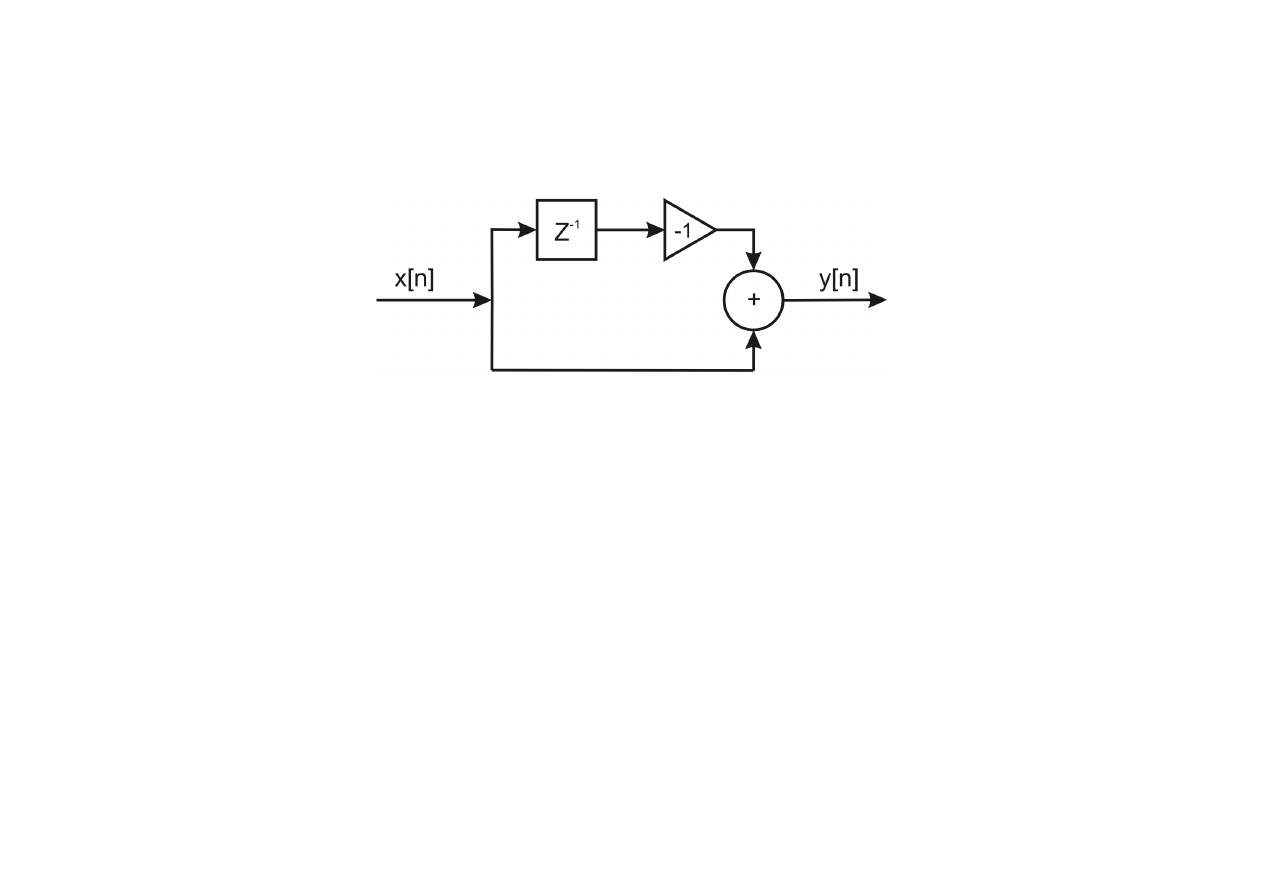
(1) Układ różniczkujący:
Układ opisany jest równaniem:
y [n]=x [n]− x [n−1]
Jeśli sygnał wejściowy zostanie opóźniony o k-próbek, wówczas:
y [n , k ]=T x [n−k ]=x [n−k ]−x [ n−k −1]
Z drugiej strony:
y [n−k ]=x [n−k ]− x [n−1−k ]=x [ n−k ]− x [n−k −1]= y [n , k ]
Układ jest więc niezmienniczy w czasie.
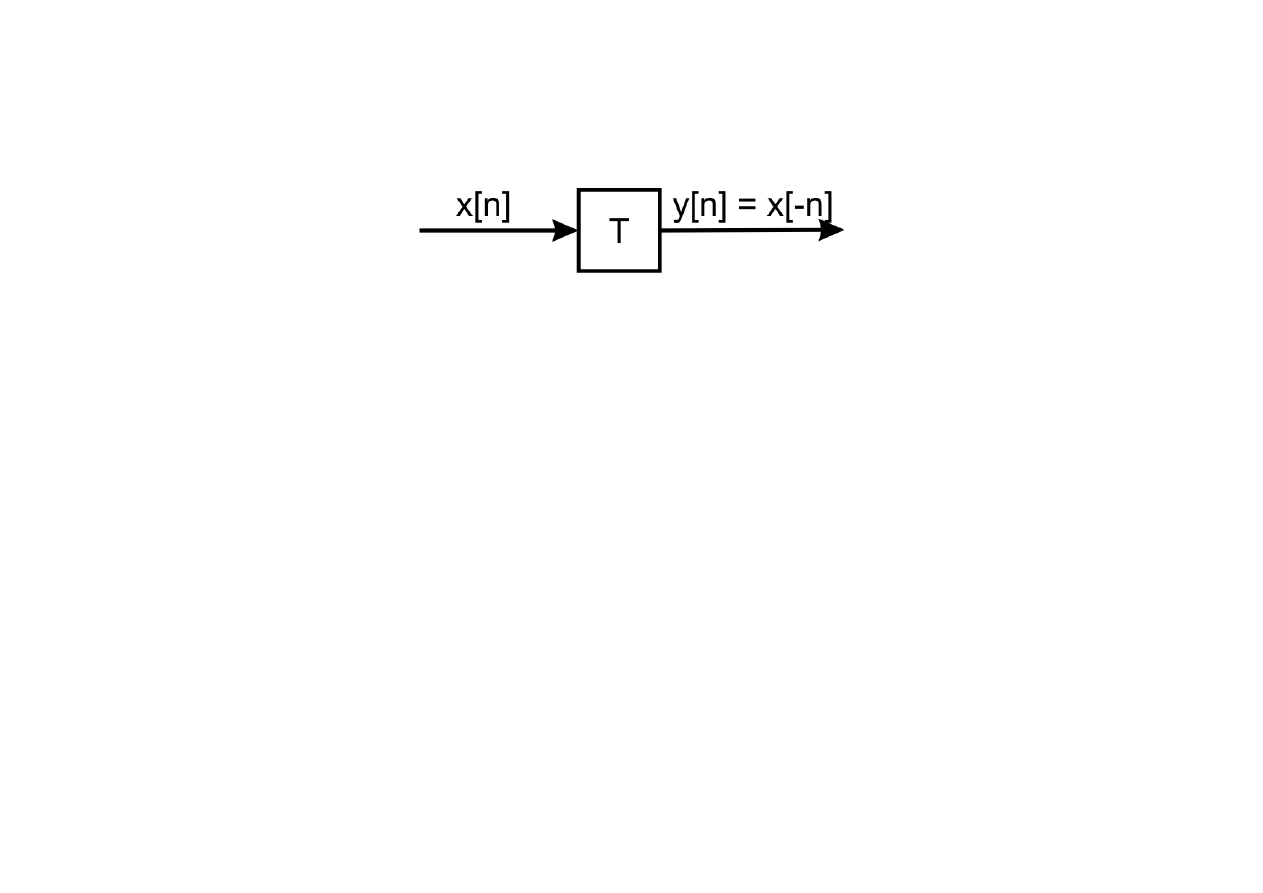
(2) Układ zawijający:
Układ opisany jest następującą relacją:
y [n]=T
x [n]
=
x [−n]
Odpowiedź układu na opóźnione pobudzenie x[n-k] wynosi:
y [n , k ]=T
x [n−k ]
=
x [−nk ]
Z drugiej strony, przesunięta odpowiedź ma postać:
y [n−k ]=x [−n−k ]≠ y [n , k ]
Układ nie jest więc niezmienniczy w czasie.
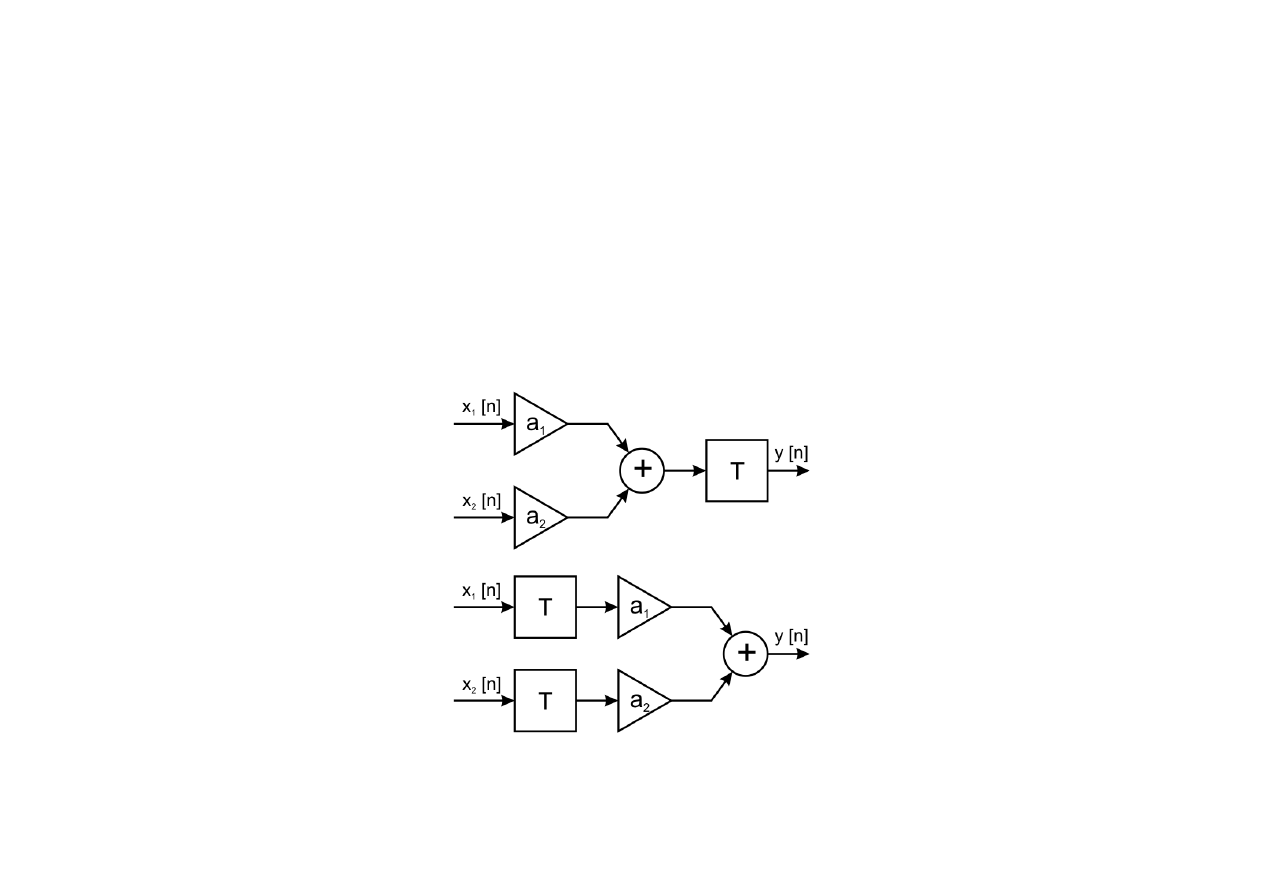
Układy liniowe i nieliniowe
Układy liniowe (Linear Systems – LS) stanowią grupę układów spełniających
zasadę superpozycji: kombinacja liniowa pobudzeń daje identyczną kombinację
liniową odpowiedzi:
∀
a
1,
a
2
∈ℂ
∀
{
x
1
[
n]}, {x
2
[
n]}
T a
1
⋅
x
1
[
n]a
2
⋅
x
2
[
n]=a
1
⋅
T x
1
[
n]a
2
⋅
T x
2
[
n]
Układy nie spełniające powyższego warunku są układami nieliniowymi.

Konsekwencje liniowości układów
(1) Układy liniowe są skalowalne:
Jeśli a
2
= 0, wówczas:
T a
1
⋅
x
1
[
n]=a
1
⋅
T x
1
[
n]=a
1
⋅
y
1
[
n]
Wynika stąd, że dowolne przeskalowanie pobudzenia powoduje proporcjonalną
zmianę odpowiedzi układu.
(2) Układy liniowe są addytywne:
Jeśli a
1
= a
2
= 1, wówczas:
T x
1
[
n] x
2
[
n]=T x
1
[
n]T x
2
[
n]= y
1
[
n] y
2
[
n]
Liniowość układów sprawia, że odpowiedź na dowolne pobudzenie może
Liniowość układów sprawia, że odpowiedź na dowolne pobudzenie może
być wyznaczona na podstawie odpowiedzi na pewne sygnały standardowe
być wyznaczona na podstawie odpowiedzi na pewne sygnały standardowe
(impuls jednostkowy, skok itp.)
(impuls jednostkowy, skok itp.)

Przykłady układów liniowych i nieliniowych
(1) Dany jest układ opisany relacją:
y [n]= x [n
2
]
Dla dwóch dowolnych ciągów wejściowych x
1
[n] oraz x
2
[n], jak też dowolnych
współczynników a
1
, a
2
zachodzi:
T a
1
⋅
x
1
[
n]a
2
⋅
x
2
[
n]=a
1
⋅
x
1
[
n
2
]
a
2
⋅
x
2
[
n
2
]=
...
a
1
⋅
T x
1
[
n]a
2
⋅
T x
2
[
n]
Układ jest więc liniowy.
(2) Dany jest układ opisany relacją:
y [n]= x
2
[
n]
Zachodzi dla niego:
T a
1
⋅
x
1
[
n]a
2
⋅
x
2
[
n]=a
1
2
⋅
x
1
2
[
n]a
2
2
⋅
x
2
2
[
n]
a
1
⋅
T x
1
[
n]a
2
⋅
T x
2
[
n]=a
1
⋅
x
1
2
[
n]a
2
⋅
x
2
2
[
n]
Układ jest zatem nieliniowy.

Układy przyczynowe i nieprzyczynowe
Układ nazywa się przyczynowym (causal system) jeśli jego odpowiedź
w dowolnej chwili czasu zależy wyłącznie od aktualnego i poprzednich stanów
wejścia:
∀
{
x [n]}
y [n]=T x n , x n−1 , x n−2 ,...
Ukłądy nie spełanijące powyższego warunku są układami nieprzyczynowymi
(noncausal systems), których odpowiedź zależy nie tylko od aktualnego i
przeszłego, ale również od przyszłego stanu wejścia.
Układów nieprzyczynowych nie można zrealizować jako układów czasu
rzeczywistego – do przetwarzania przyszłych próbek sygnału należy
zarejestrować uprzednio cały sygnał.

Układy stabilne i niestabilne
Stabilność układów jest cechą niezwykle ważną z punktu widzenia ich praktycznej
przydatności. Układy niestabilne wykazują zachowania niepożądane, jak np.
generują znaczące błędy, gwałtownie reagują na niewielkie zmiany pobudzenia,
czy też powodują przepełnienie zakresu przetwarzanych próbek.
Układ nazywa się stabilnym w sensie BIBO (Bounded Input – Bounded Output
Stable System), wtedy i tylko wtedy, gdy skończone pobudzenie generuje
skończoną odpowiedź:
∀
n
∃
M
x
, M
y
{
x [n]}≤M
x
∞
⇒
{
y [n]}≤M
y
∞
Jeśli powyższy warunek nie jest spełniony, układ jest niestabilny (unstable
system).

Ex.: Sprawdźmy stabilność układu nieliniowego opisanego zależnością:
y [n]= y
2
[
n−1] x [n]
Jako sygnał ograniczony wybierzmy:
x [n]=C⋅[n] ,C ∈ℤ ,∣C∣∞
Załóżmy ponadto, że:
y [−1]=0
Wówczas odpowiedź układu ma postać:
y [0]=C ,
y [1]=C
2,
y [2]=C
4,
y [n]=C
2⋅n
Układ jest stabilny w sensie BIBO, gdy
∣
C∣≤1
, jeśli jednak
∣
C∣1
układ staje
się niestabilny.
Łączenie układów
Układy czasu dyskretnego można łączyć w większe bloki. Istnieją dwa
podstawowe sposoby połączeń: kaskadowe (szeregowe) oraz równoległe,
z których każdy daje w wyniku inną charakterystykę wypadkową układu.
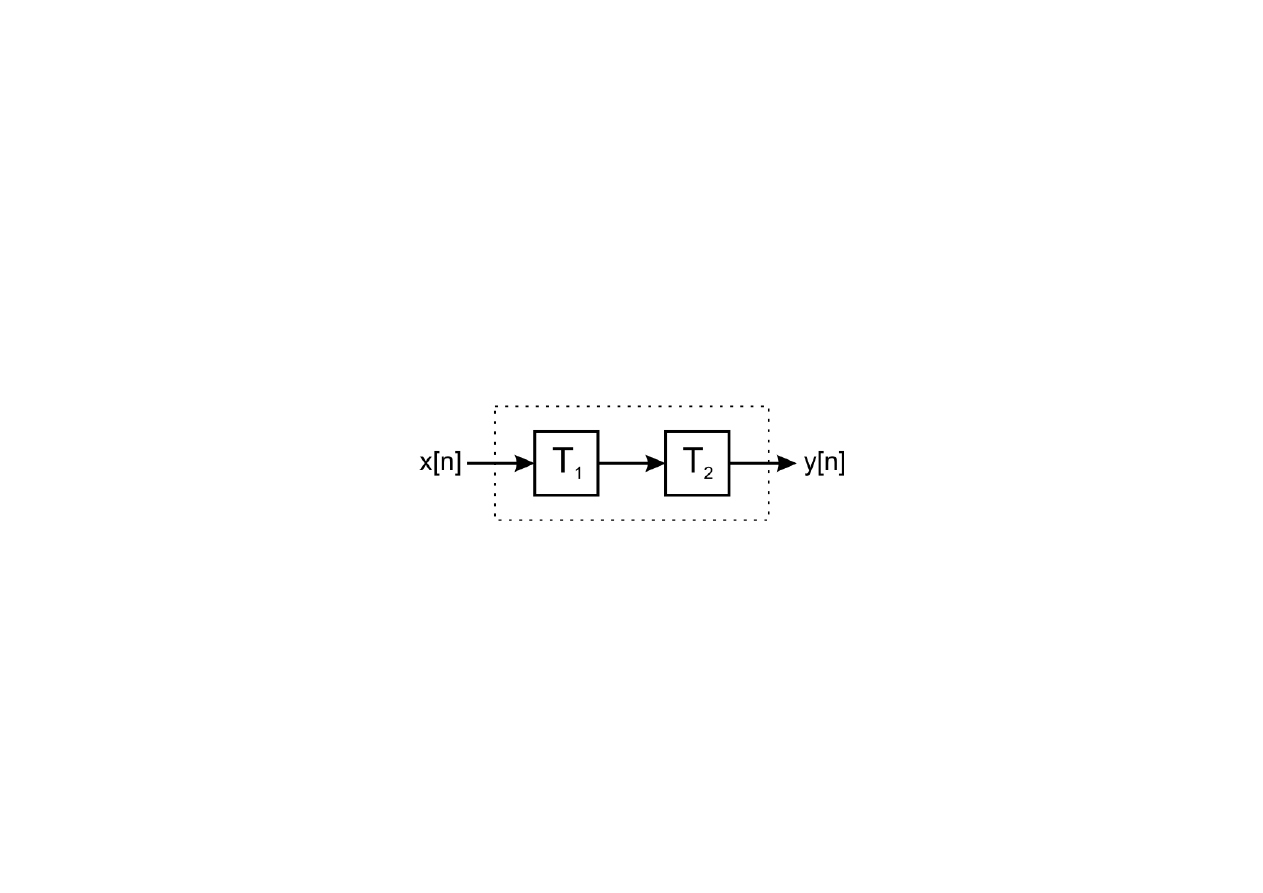
(1) Połączenie szeregowe (kaskadowe):
Wypadkowa odpowiedź układów na pobudzenie x[n] wynosi:
y [n]=T
2
T
1
x [n]
Układy T
2
oraz T
1
mogą być zatem połączone w jeden układ T
s
:
T
s
=
T
2
⋅
T
1

Przemienność operacji kaskadowych
W ogólności, istotna jest kolejność kaskadowego łączenia układów, bowiem:
T
2
⋅
T
1
≠
T
1
⋅
T
2
Twierdzenie
Jeśli układy T
1
oraz T
2
są liniowe i niezmiennicze w czasie (Linear Time-Invariant
– LTI), wówczas układ T
C
jest niezmienniczy w czasie i przemienny:
T
2
T
1
x [ n−k ]=T
2
y
1
[
n−k ]= y [n−k ]
Przemienność układów LTI wynika z definicji ich odpowiedzi jako splotu
pobudzenia i charakterystyki I/O.
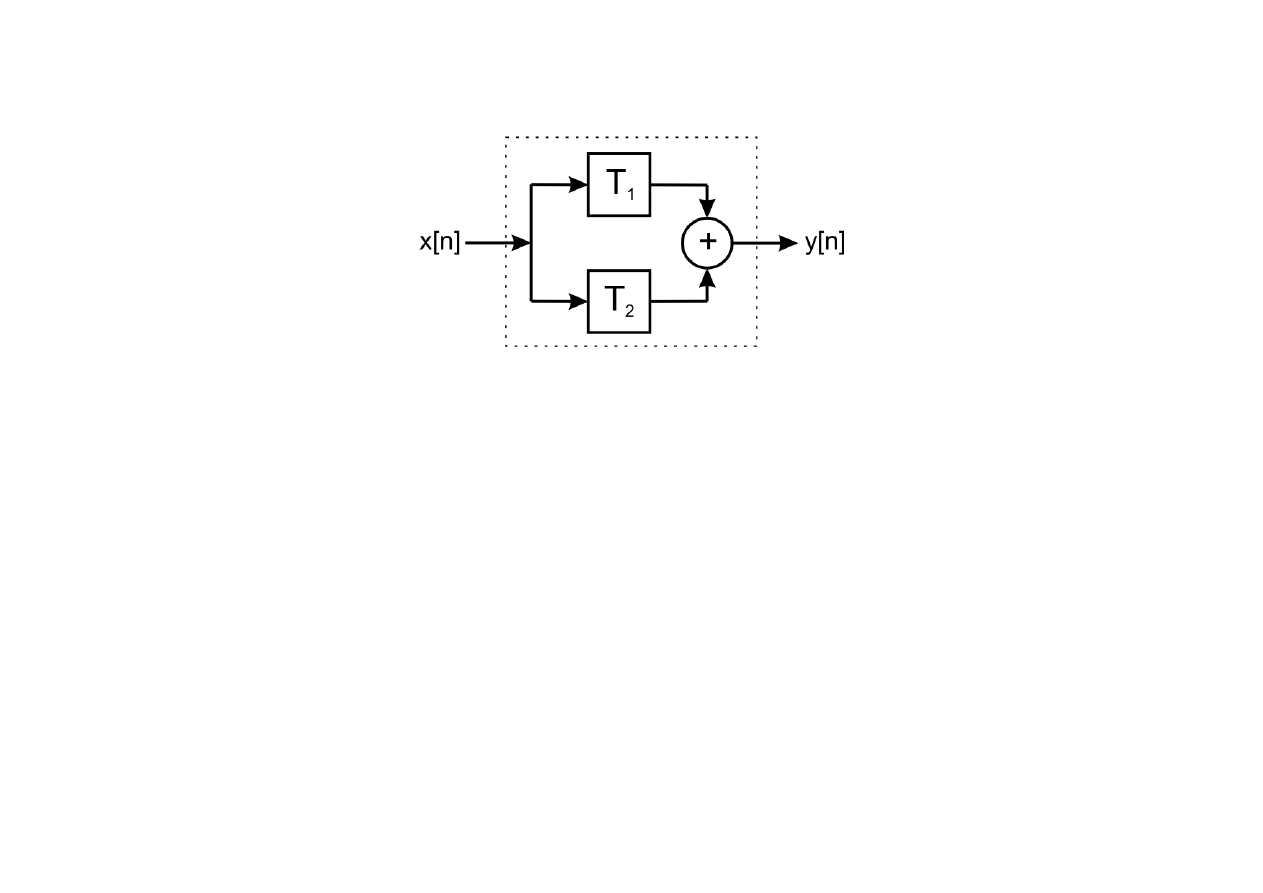
(2) Połączenie równoległe:
Odpowiedź układu na pobudzenie x[n] ma postać:
y [n]=T
1
x [n]T
2
x [n]= y
1
[
n] y
2
[
n]=T
1
T
2
x [n]=T
p
x [n]
Możliwość łączenia układów pozwala konstruować układy złożone z bloków
podstawowych, ale z drugiej strony – pozwala także dzielić układy złożone na
prostsze funkcjonalnie bloki w celu ich późniejszej analizy.

Odpowiedź impulsowa i skokowa filtrów cyfrowych
Odpowiedzią impulsową filtru cyfrowego (impulse response) jest odpowiedź
tego filtru na pobudzenie impulsem jednostkowym:
h[n]=T [n]
Analogicznie, odpowiedzią skokową (step response) filtru cyfrowego jest ciąg
będący odpowiedzią na pobudzenie skokiem jednostkowym:
s[n]=T [n]
Ex.: Znaleźć odpowiedź impulsową układu:
y [n]=a
1
⋅
x [n−1]a
2
⋅
x [n]
Odpowiedź impulsowa h[n] jest odpowiedzią na pobudzenie impulsem
jednostkowym, tak więc:
h[n]=a
1
⋅[
n−1]a
2
⋅[
n]={a
1,
a
2
}

Analiza układów LTI czasu dyskretnego w dziedzinie czasu
Istnieją dwie podstawowe metody analizy układów LTI czasu dyskretnego
w dziedzinie czasu:
–
poprzez rozwiązanie równania różnicowego opisującego zależność
wejściowo-wyjściową,
–
określenie wypadkowej odpowiedzi układu (splotu) na pobudzenie będące
kombinacją liniową sygnałów elementarnych
Konsekwencją liniowości i niezmienniczości w czasie układów LTI czasu
Konsekwencją liniowości i niezmienniczości w czasie układów LTI czasu
dyskretnego jest fakt, iż układy takie są w pełni opisywane poprzez podanie
dyskretnego jest fakt, iż układy takie są w pełni opisywane poprzez podanie
ich odpowiedzi impulsowej h[n].
ich odpowiedzi impulsowej h[n].
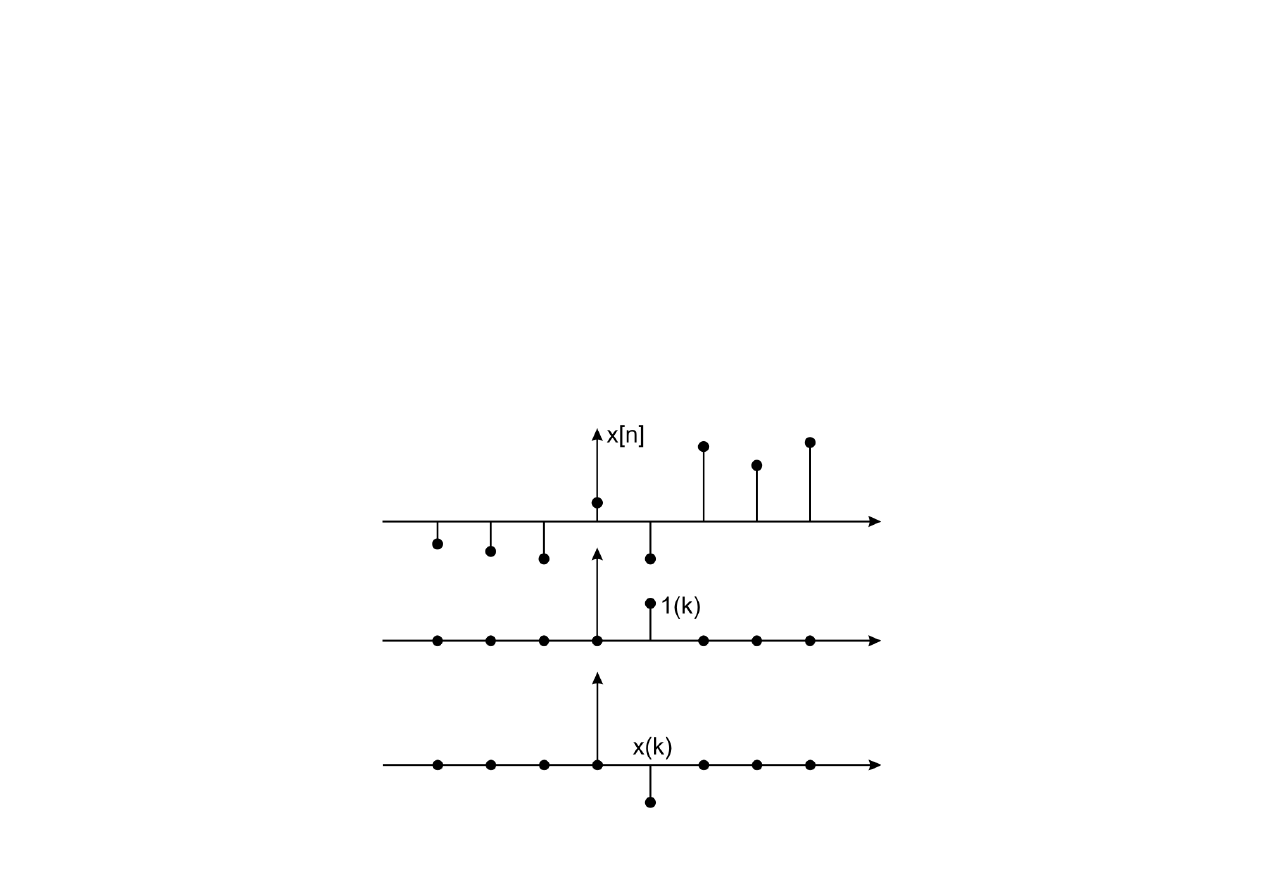
Dekompozycja sygnału
Niech x[n] będzie dowolnym ciągiem w przestrzeni H, zaś
{
k
[
n]}={[ n−k ]}
-
bazą tej przestrzeni. Sygnał x[n] daje się wówczas rozwinąć w bazie w postaci:
x [n]=
∑
k =−∞
∞
x [k ]⋅[n−k ]
gdzie wartości x[k] stanowią wagi próbek ciągu.

Odpowiedź układu liniowego na dowolne pobudzenie
Oznaczmy odpowiedź układu liniowego na pobudzenie impulsem jednostkowym
jako:
y [n , k ]=T [n−k ]≡h[n , k ]
Odpowiedź tego samego układu na dowolne pobudzenie będące kombinacją
liniową impulsów jednostkowych wynosi:
y [n]=T
∑
k =−∞
∞
x [ k ]⋅[n−k ]
=
∑
k =−∞
∞
x [k ]⋅T
[
n−k ]
=
∑
k =−∞
∞
x [k ]⋅h[n , k ]
Powyższe wyrażenie jest prawdziwe dla dowolnego układu liniowego (zarówno
TI, jak i TV).

Splot sygnałów
W przypadku układów LTI, odpowiedź na pobudzenie będące kombinacją
przesuniętych impulsów jednostkowych upraszcza się do postaci:
y [n]=T
∑
k =−∞
∞
x [k ]⋅[n−k ]=
∑
k =−∞
∞
x [ k ]⋅h[n−k ]= x [n]°h[n]
Powyższe wyrażenie określa się mianem splotu sygnałów (convolution sum).
Kolejność działań w przypadku obliczania splotu:
–
Zawijanie (folding) ciągu h[n] → h[-n],
–
Przesunięcie ciągu h[-n] o k-próbek → h[k-n],
–
Wymnożenie odpowiednich próbek ciągów x[n] oraz h[k-n] → x[n]∙h[k-n],
–
Wysumowanie wszystkich iloczynów x[n]∙h[k-n], aby otrzymać wartość splotu
dla n
0
= k → y[n
0
] = x[n]∙h[n
0
–
n].
Wyszukiwarka
Podobne podstrony:
DSP Wyk%b3ad 02 UWM
DSP Wyk%b3ad 08 UWM
DSP Wyk%b3ad 07 UWM
DSP Wyk%b3ad 11 UWM
DSP Wyk%b3ad 10 UWM
DSP Wyk%b3ad 05 UWM
DSP Wyk%b3ad 09 UWM
DSP Wyk%B3ad 01 UWM
DSP Wyk%b3ad 03 UWM
DSP Wyk%b3ad 13 UWM
DSP Wyk%b3ad 06 UWM
więcej podobnych podstron