
Sławomir Kulesza
Cyfrowe przetwarzanie sygnałów (7)
Wykład dla studentów I roku (N)SMU WMiI
Specjalność: Techniki multimedialne
1 (37)
Definicja z- transformaty
z-transformatą sygnału czasu dyskretnego x[n] nazywa się szereg potęgowy X[z]:
X z=
∑
n=−∞
∞
x [n]⋅z
−
n
, z∈ℂ
Powyższy wzór definiuje tzw. prostą z-transformatę, zamieniającą sygnał x[n]
w jego reprezentację w dziedzinie liczb zespolonych X[z]. Procedura odwrotna,
tj. przekształcenie ciągu X[z] w x[n] nazywa się odwrotną z-transformatą.
Przyjmijmy następujące oznaczenia:
X z =Z x [n]
x [n]
z
X z
Ponieważ z-transformata jest nieskończonym szeregiem potęgowym, jest istnienie
jest uwarunkowane zbieżnością z uwagi na z. Obszarem zbieżności (ROC –
Region of Convergence) jest zbiór wszystkich z, dla których X[z] jest skończona.
2 (37)
Ex.: Wyznaczyć z-transformatę następujących sygnałów:
(1) x[n] = [1, 2, 4, 5]
X z =
∑
−∞
∞
x [n]⋅z
−
n
=
∑
0
3
x [n]⋅z
−
n
=
1⋅z
0
2⋅z
−
1
4⋅z
−
2
5⋅z
−
3
=
...
...=12⋅z
−
1
4⋅z
−
2
5⋅z
−
3
ROC =ℂ/{0}
(2) x[n] = [2, 4, 5, 7, 0, 1]
X z =2⋅z
2
4⋅z57⋅z
−
1
z
−
3
; ROC=ℂ/{0,±∞}
(3) x[n] = δ[n]
X z =1 ; ROC=ℂ
(4) x
1
[n] = δ[n - k], x
2
[n] = δ[n + k]; k>0
X
1
z =z
−
k
; ROC =ℂ/{0}; X
2
z = z
k
; ROC =ℂ/{±∞}
3 (37)

–
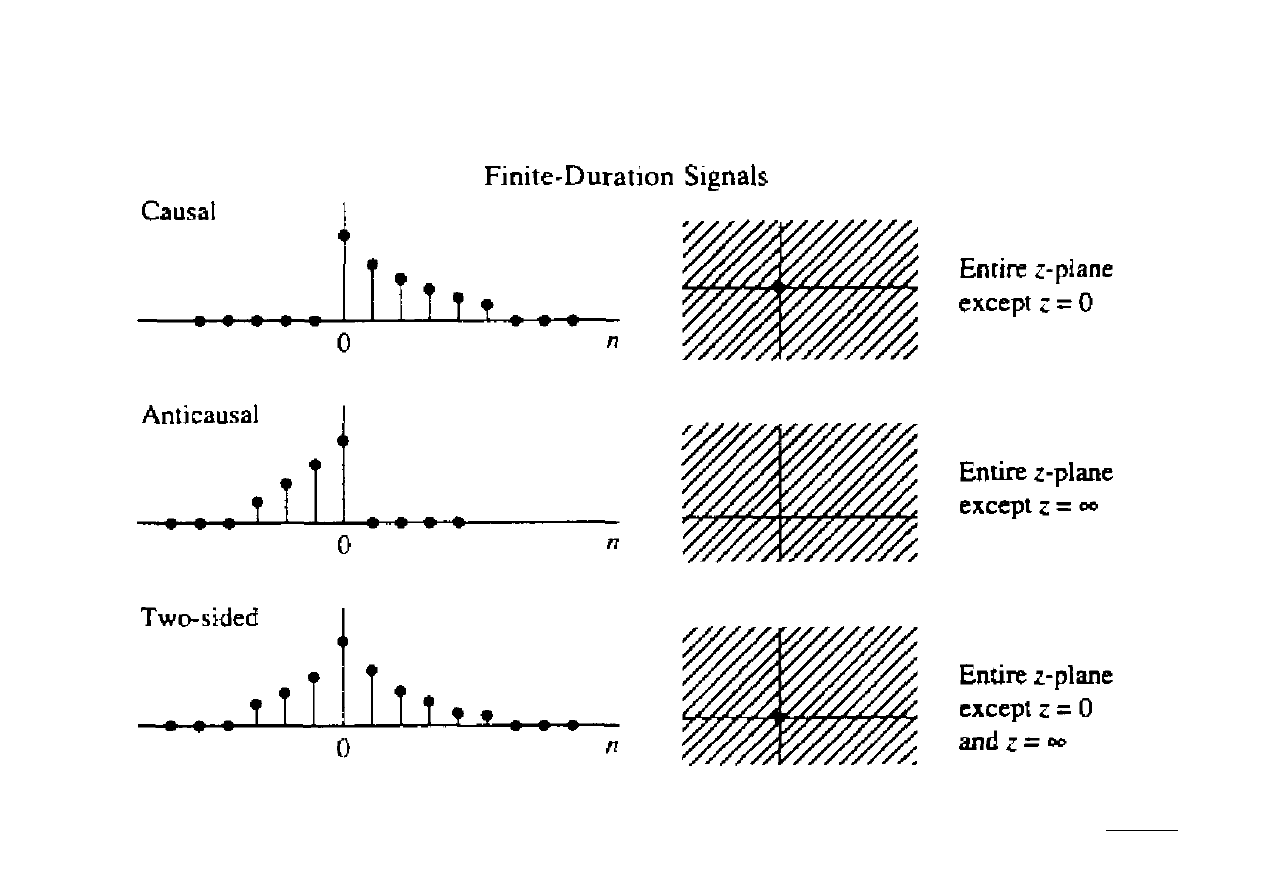
Z powyższych przykładów wynika, iż ROC sygnałów skończonych
(o skończonym czasie trwania) jest cała płaszczyzną liczb zespolonych za
wyjątkiem biegunów transformaty, w których jest ona rozbieżna.
–
Z matematycznego punktu widzenia z-transformata jest alternatywną
reprezentacją sygnału, w której współczynnik stojący przy z
-n
jest próbką
sygnału z chwili n.
–
W wielu przypadkach możemy wyrazić sumę skończonego lub nieskończonego
szeregu z-transformaty w postaci zamkniętego wyrażenia, co pozwala
w kompaktowy sposób reprezentować informację o sygnale.
4 (37)
Ex.: Wyznaczyć z-transformatę sygnału:
x [n]=
1
2
n
⋅
u [n]
Przedstawmy sygnał x[n] w postaci jawnej:
x [n]=
[
1 ,
1
2
,
1
4
,...
]
Stąd jego z-transformata jest szeregiem:
X z =1
1
2
z
−
1
1
4
z
−
2
...=
∑
n=0
∞
1
2
n
⋅
z
−
n
=
∑
n=0
∞
1
2
⋅
z
−
1
n
Granicą tego szeregu jest:
X z =
1
1−
1
2
z
−
1
⇔
∣
1
2
z
−
1
∣
1 ; ROC :∣z∣1
5 (37)

Wyznaczanie ROC
Przedstawmy z-transformatę jako funkcję zmiennej z w postaci biegunowej:
z=r⋅e
i
Wówczas:
X z =
∑
n=−∞
∞
x [n]⋅r
−
n
⋅
e
−
i n
W obszarze ROC X[z] jest zbieżna, tak więc:
∣
X z ∣=
∣
∑
−∞
∞
x [ n]⋅r
−
n
⋅
e
−
i n
∣
≤
∑
n=−∞
∞
∣
x [n]∣⋅∣r
−
n
∣⋅∣
e
−
i n
∣=
∑
n=−∞
∞
∣
x [n]∣⋅∣r
−
n
∣
Zatem z-transformata jest ograniczona wtedy, gdy ciąg x[n]·r
-n
jest bezwględnie
sumowalny. Problem znajdowania ROC redukuje się zatem do problemu
wyznaczenia zakresu wartości r, dla których x[n]·r
-n
jest bezwględnie sumowalny.
6 (37)
Przypomnijmy, że:
∣
X z ∣=
∑
n=−∞
∞
∣
x [n]∣⋅∣r
−
n
∣=
∑
n=−∞
−
1
∣
x [n] r
−
n
∣
∑
n=0
∞
∣
x [n]
r
n
∣
=
...
...=
∑
n=1
∞
∣
x [−n] r
n
∣
∑
n=0
∞
∣
x [n]
r
n
∣
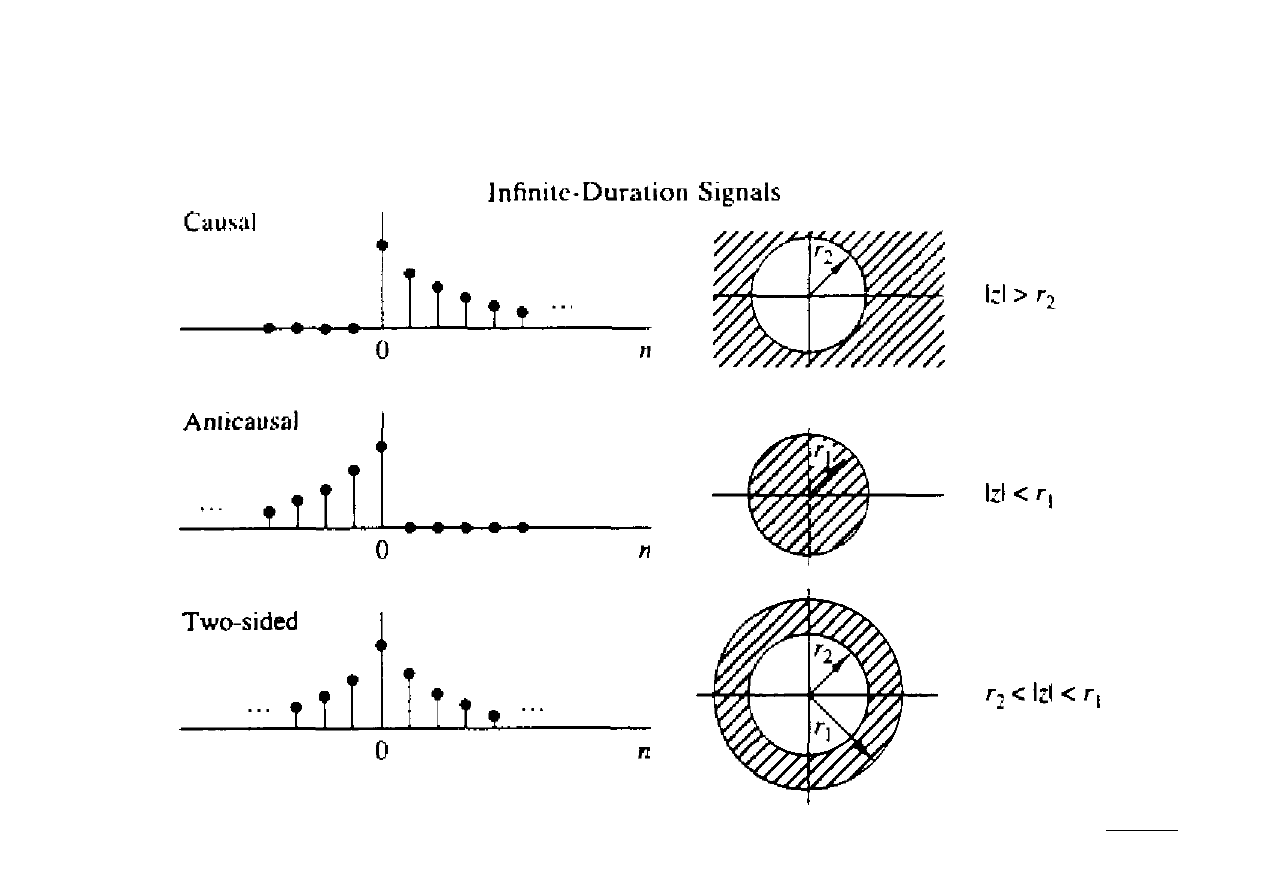
Z powyższego wzoru wynika, że ROC z-transformaty jest iloczynem dwóch
zbiorów z płaszczyzny liczb zespolonych:
–
punktów należących do wnętrza koła o promieniu r
1
na tyle małych, że pierwszy
szereg jest bezwzględnie sumowalny,
–
punktów leżących poza kołem o promieniu r
2
na tyle dużych, że drugi szereg
jest bezwzględnie sumowalny.
7 (37)
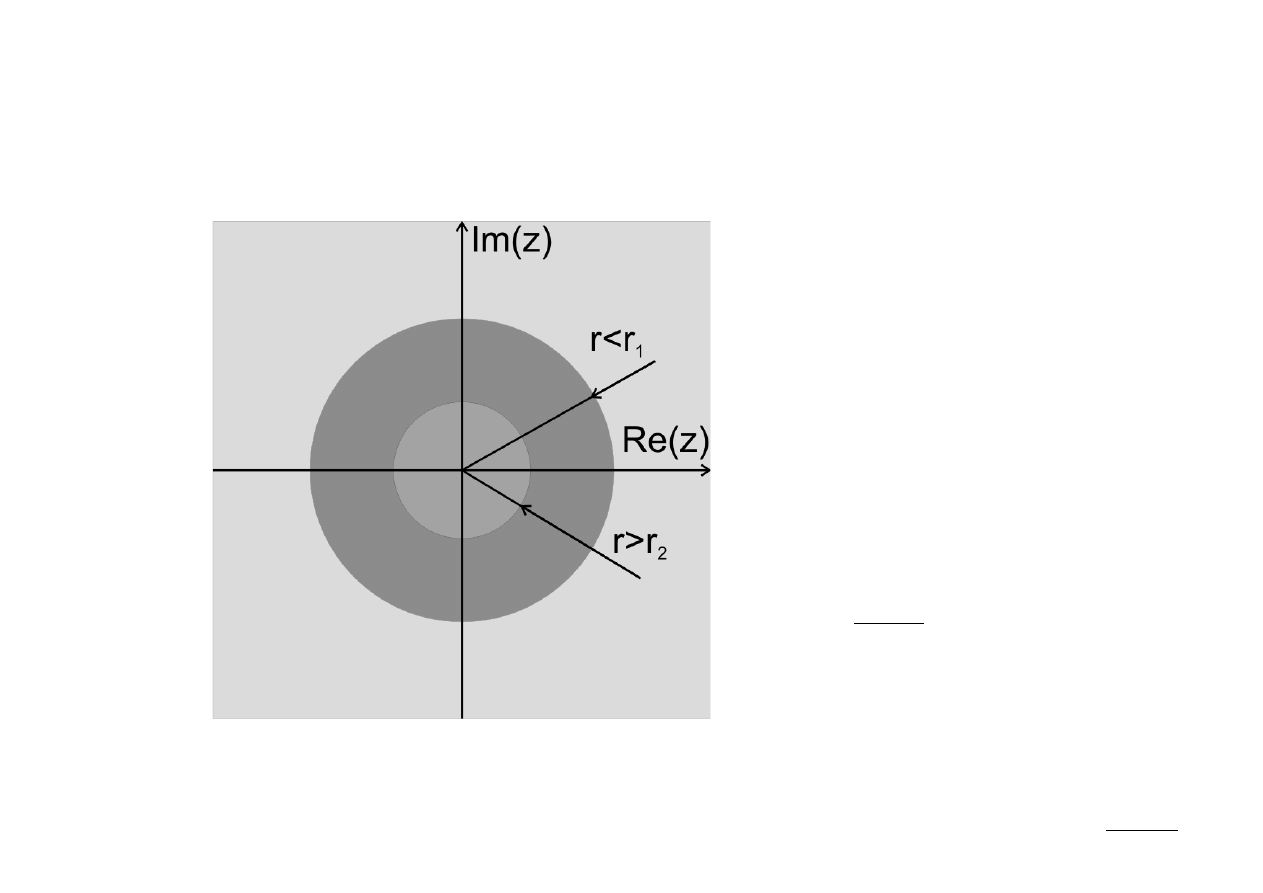
Ponieważ z-transformata ma być jednocześnie bezwzględnie sumowalna, ROC
musi być iloczynem (częścią wspólną) obu powyższych zbiorów:
8 (37)
Zbieżność
∑
n=0
∞
∣
x [n]
r
n
∣
Zbieżność
∑
n=1
∞
∣
x [−n]⋅r
n
∣
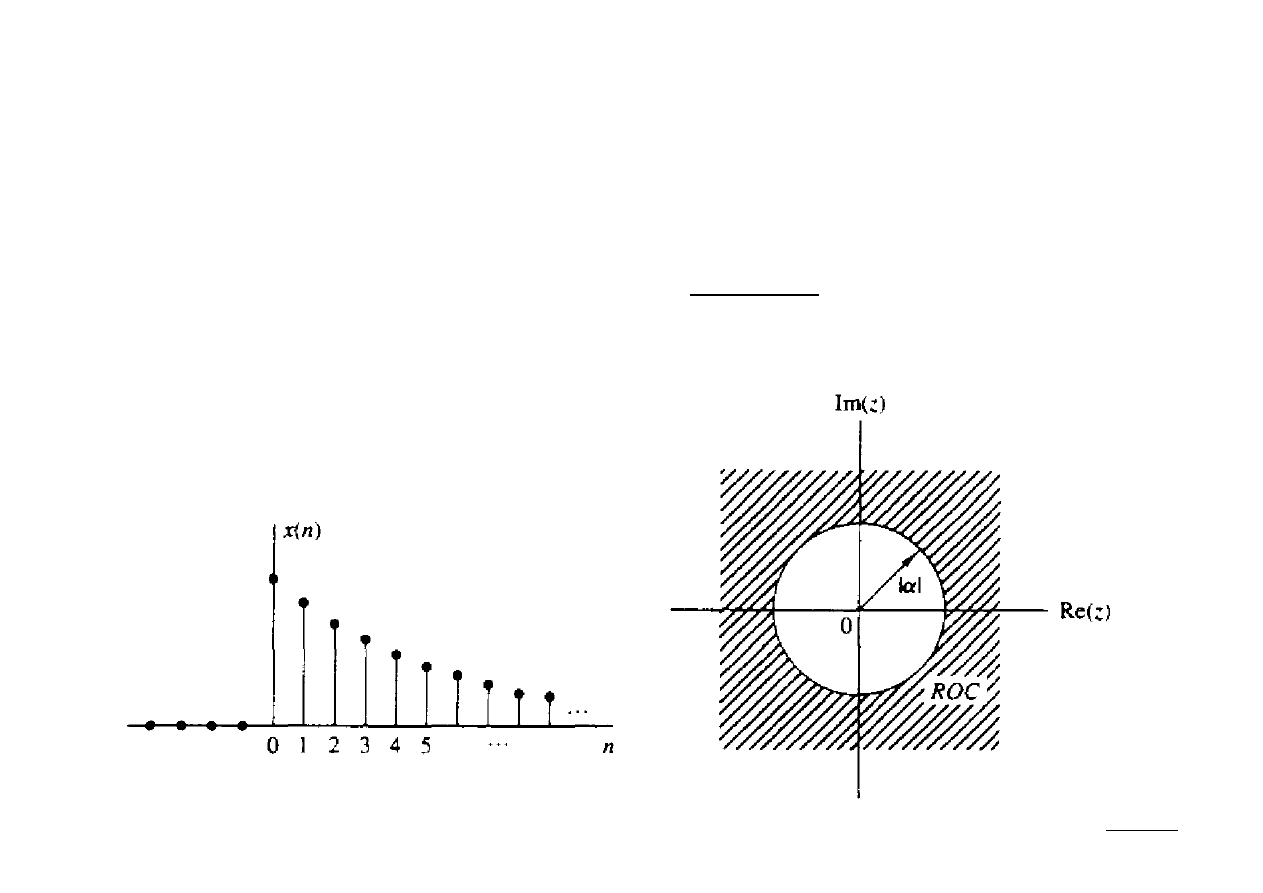
Ex.: Wyznaczyć z-transformatę sygnału:
x [n]=a
n
⋅
u[n]
Z definicji z-transformaty wynika, że:
X z =
∑
n=0
∞
a
n
⋅
z
−
n
=
∑
n=0
∞
a⋅z
−
1
n
=
1
1−a⋅z
−
1
; ROC :∣z∣∣a∣
9 (37)
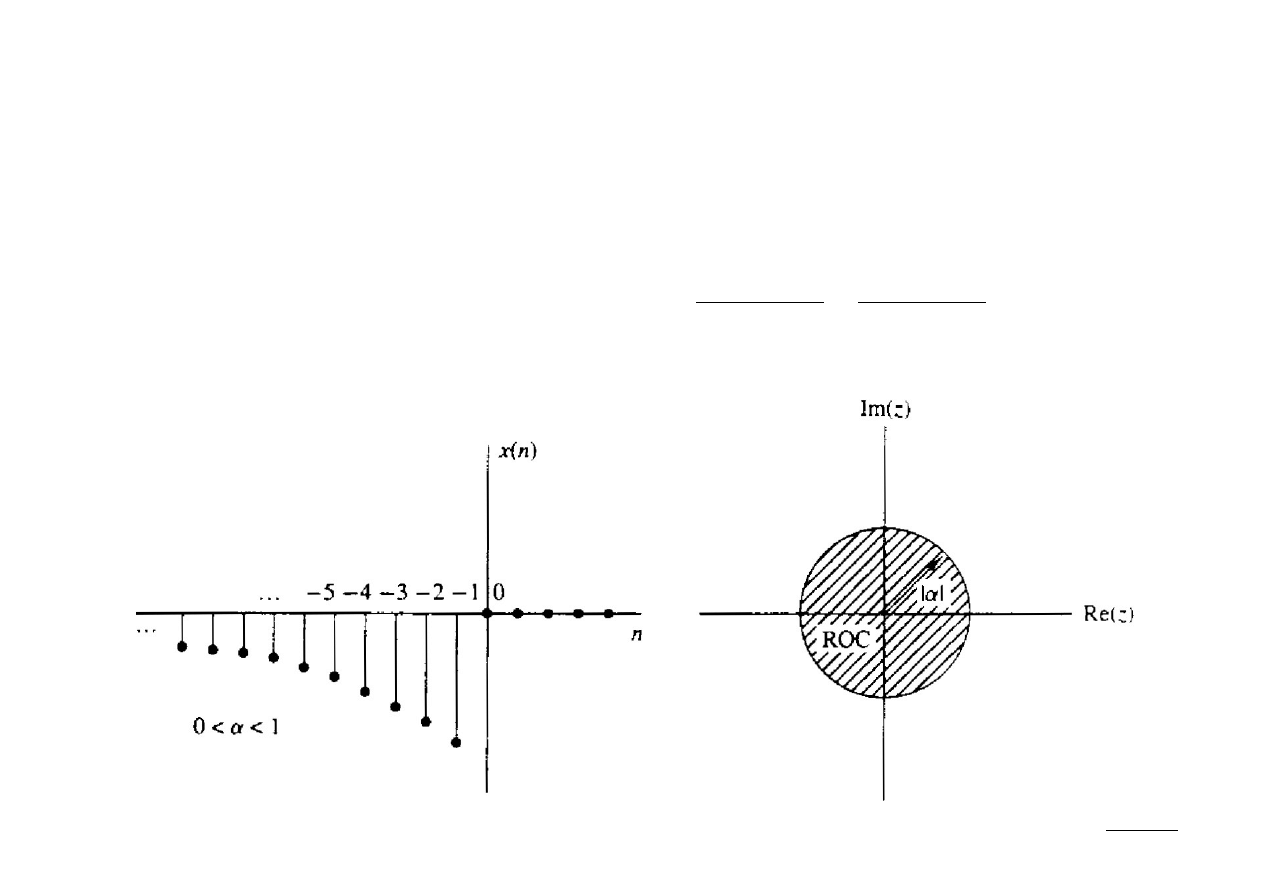
Ex.: Wyznaczyć z-transformatę sygnału:
x [n]=−a
n
⋅
u[−n−1]
Z definicji z-transformaty wynika, że:
X z =
∑
n=−∞
−
1
−
a
n
⋅
z
−
n
=−
∑
n=1
∞
a
−
1
⋅
z
n
=−
a
−
1
⋅
z
1−a
−
1
⋅
z
=
1
1−a⋅z
−
1
; ROC :∣z∣∣a∣
10 (37)

Jednoznaczność z-transformaty
Powyższe przykłady pokazały, że w ogólności istnieją sygnały posiadające
identyczną z-transformatę, np. przyczynowy sygnał u[n] oraz antyprzyczynowy
u[-n-1]:
Z u[ n]=Z u[−n−1]=
1
1−z
−
1
Oznacza to, że zamknięta postać z-transformaty nie pozwala jednoznacznie
odtworzyć sygnału w dziedzinie czasu. Powyższej niejednoznaczności można
uniknąć wtedy, gdy oprócz z-transformaty wyspecyfikujemy także jej ROC.
11 (37)

Jednoznaczność z-transformaty
(1) Sygnały czasu dyskretnego x[n] są określone jednoznacznie poprzez podanie
ich z-transformaty X(z) oraz obszaru zbieżności ROC,
(2) ROC sygnałów antyprzyczynowych leży wewnątrz okręgu o promieniu r
1
, zaś
ROC sygnałów przyczynowych leży poza okręgiem o promieniu r
2
.
12 (37)
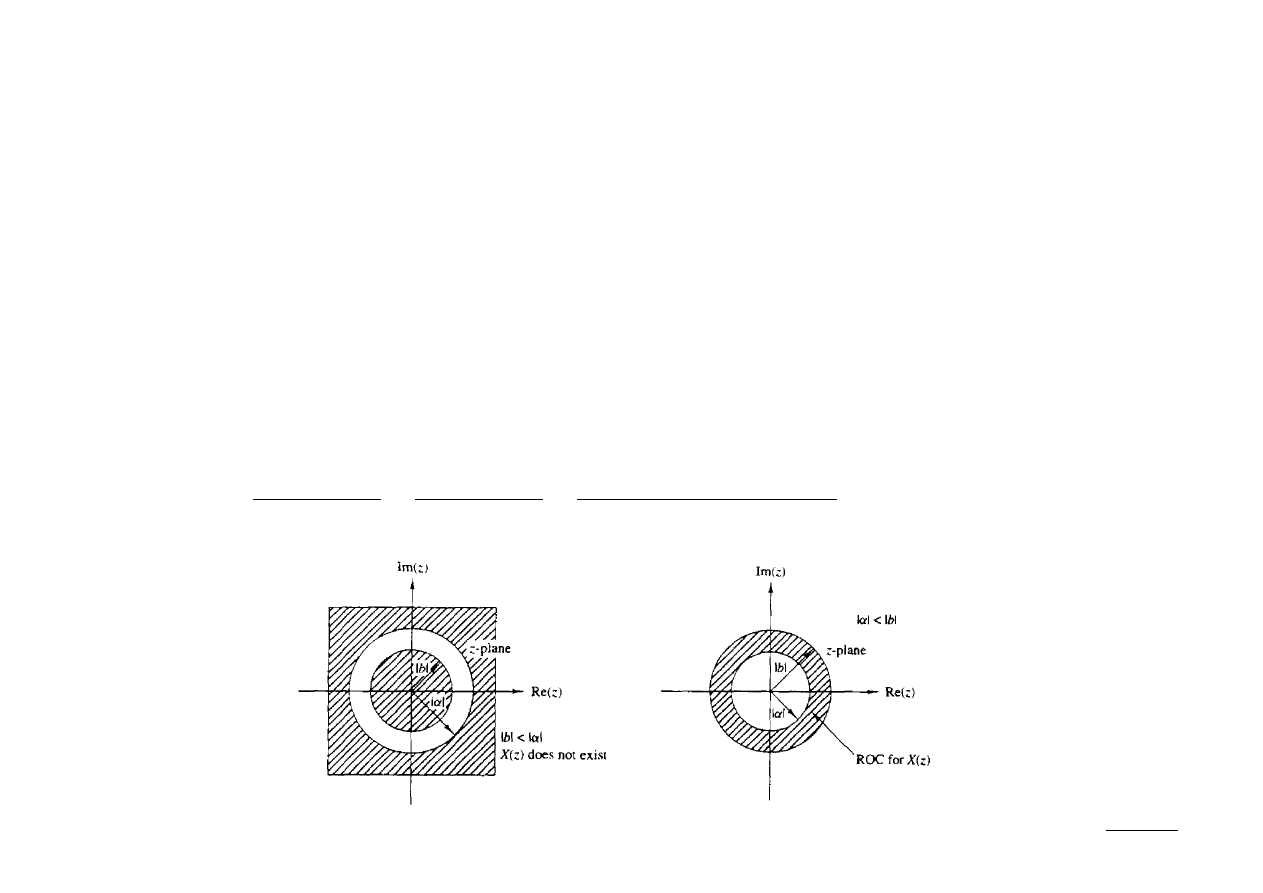
Ex.: Wyznaczyć z-transformatę sygnału:
x [n]=a
n
u[n]b
n
u[−n−1]
X z =
∑
n=0
∞
a⋅z
−
1
n
∑
n=1
∞
b
−
1
⋅
z
n
; ROC :∣z∣∣a∣,∣z∣∣b∣
Rozpatrzmy 2 przypadki:
(1) |b| < |a|: obszary nie przekrywają się, więc X[z] nie istnieje,
(2) |b| > |a|:
X [ z ]=
1
1−a⋅z
−
1
−
1
1−b⋅z
−
1
=
b−a
ab−z−a⋅b⋅z
−
1
; ROC :∣a∣∣z∣∣b∣
13 (37)
Rodziny charakterystycznych sygnałów i ich ROC
14 (37)
Rodziny charakterystycznych sygnałów i ich ROC
15 (37)
Odwrotna z-transformata
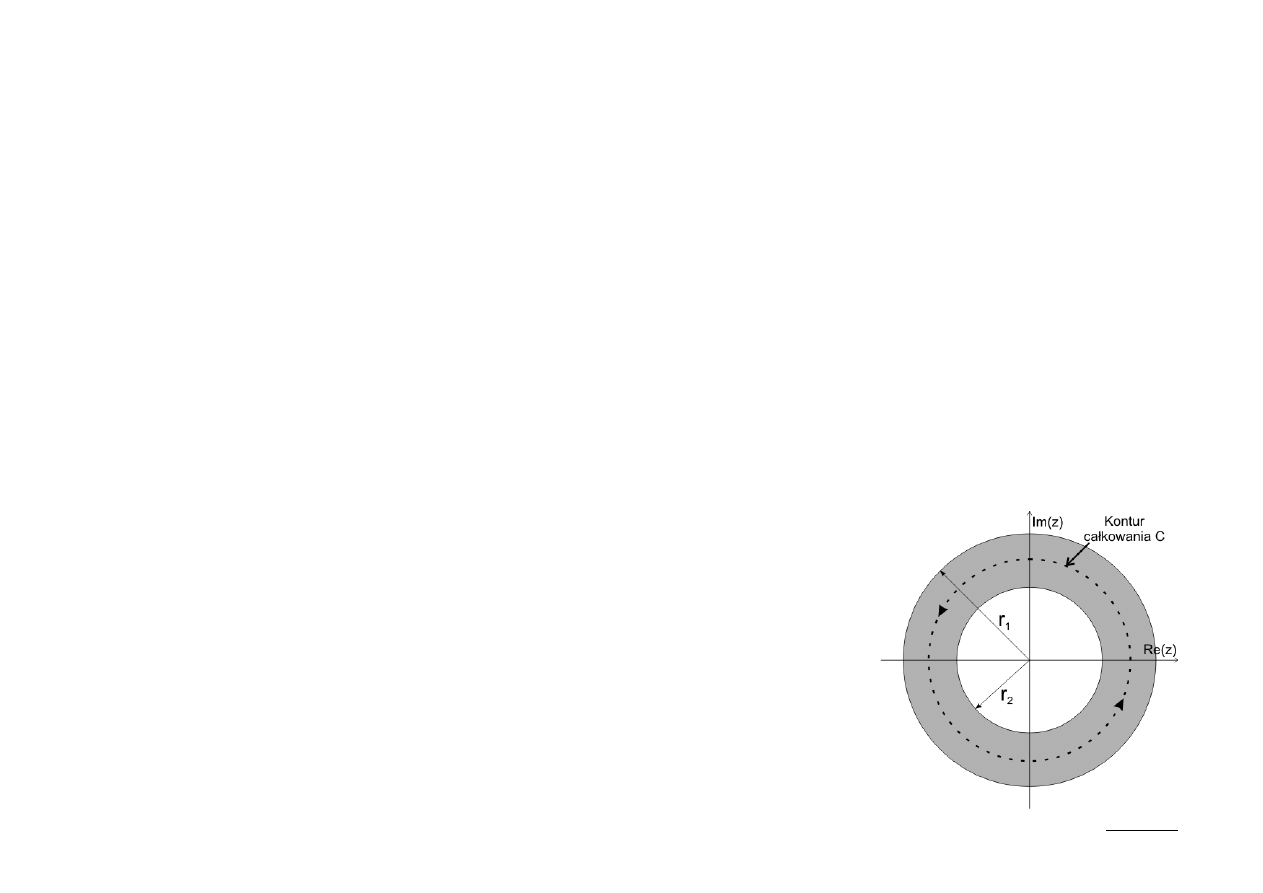
Proces obliczania odwrotnej z-transformaty pozwala z wyrażenia X(z) uzyskać
ciąg sygnałowy x[n], korzystając z teorii całek Cauchy'ego.
Przyjmijmy, że dana jest z-transformata (o znanym ROC) postaci:
X z =
∑
k =−∞
∞
x [ k ]⋅z
−
k
Przemnóżmy obie strony powyższego wyrażenia przez z
n-1
i scałkujmy je po
dowolnym zamkniętym konturze C zawartym całkowicie wewnątrz ROC:
∮
C
X z⋅z
n−1
dz=
∮
C
∑
k =−∞
∞
x [k ]⋅z
n−1−k
dz
Ponieważ szereg jest w ROC zbieżny, więc można
zamienić kolejność sumowania i całkowania:
∮
C
X z ⋅z
n−1
dz=
∑
k =−∞
∞
x [ k ]
∮
C
z
n−1−k
dz
16 (37)
W teorii całek Cauchy'ego istnieje tożsamość:
∮
C
z
n−1−k
dz=2⋅⋅i⋅n−k
Stąd mamy, że:
∮
C
X z ⋅z
n−1
dz=
∑
k =−∞
∞
x [ k ]⋅2⋅⋅i⋅n−k =2⋅⋅i⋅x [ n]
Ostatecznie, poszukiwana odwrotna z-transformata ma postać:
x [n]=
1
2⋅⋅i
∮
C
X z ⋅z
n−1
dz
17 (37)

Własności z-transformaty
(1) Liniowość z-transformaty:
Jeśli Z(x
1
[n]) = X
1
(z) oraz Z(x
2
[n]) = X
2
(z), to:
Z a
1
⋅
x
1
[
n]a
2
⋅
x
2
[
n]=a
1
⋅
X
1
a
2
⋅
X
2
Dowód:
Z a
1
⋅
x
1
a
2
⋅
x
2
=
∑
k =−∞
∞
a
1
⋅
x
1
a
2
⋅
x
2
⋅
z
−
n
=
...
...=a
1
∑
k =−∞
∞
x
1
⋅
z
−
n
a
2
∑
k =−∞
∞
x
2
⋅
z
−
n
=
a
1
⋅
X
1
z a
2
⋅
X
2
z
z-transformata dowolnego sygnału wyrażonego kombinacją liniową sygnałów
elementarnych jest kombinacją liniową z-transformat tychże sygnałów
elementarnych.
18 (37)
Ex.: Wyznaczyć z-transformatę sygnału:
x [n]=cos2 f n⋅u[n]
Skorzystajmy z tożsamości:
x [n]=cos2 f n⋅u[n]=
1
2
e
i 2 f n
u[n]
1
2
e
−
i 2 f n
u[n]=...
Korzystając z liniowości z-transformaty oraz wiedząc, że:
Z a
n
u[n]=
1
1−a⋅z
−
1
; ROC :∣z∣∣a∣
Otrzymamy:
Z x [ n]=
1
2
⋅
1
1−e
i 2 f
⋅
z
−
1
1
2
⋅
1
1−e
−
i 2 f
⋅
z
−
1
; ROC :∣z∣∣e
±
i 2 f
∣=
1
Ostatecznie:
Z cos2 f n⋅u[ n]=
1−z
−
1
cos2 f n
1−2z
−
1
cos2 f nz
−
2
; ROC :∣z∣1
19 (37)

(2) Przesunięcie z-transformaty w czasie:
Jeśli Z(x[n]) = X(z), to:
Z x [ n−k ]=z
−
k
X z
Dowód:
Z x [ n−k ]=
∑
n=−∞
∞
x [n−k ] z
−
n
=
∑
m=−∞
∞
x [m] z
−
mk
=
...
...=z
−
k
∑
m=−∞
∞
x [m] z
−
m
=
z
−
k
X z
ROC z-transformaty przesuniętej jest takie samo jak z-transformaty
nieprzesuniętej, oprócz z = 0, gdy k > 0 oraz z = ∞, gdy k < 0.
Skoro więc przy wyrazie z
-n
stoi wartośc n-tej próbki sygnału x[n], to opóźnienie
sygnału o k-próbek (k>0) oznacza przemnożenie z-transformaty przez z
-k
.
20 (37)

Ex.: Wyznaczyć z-transformatę sygnału:
x [n]=u[n]−u[n− N ]
Korzystając z przesuwalności z-transformaty w czasie:
Z u[ n]−u[n−N ]=Z u[n]−Z u[n− N ]=1−z
−
N
⋅
Z u[n]=...
...=
1− z
−
N
⋅
1
1−z
−
1
=
1−z
−
N
1−z
−
1
; ROC :∣z∣1
Z powyższego przykładu wypływa wniosek, iż jeśli kombinacja liniowa sygnałów
ma skończony czas trwania, wówczas ROC jej z-transformaty jest uwarunkowana
wyłącznie skończonym czasem trwania sygnału, a nie ROC poszczególnych
z-transformat.
21 (37)

(3) Skalowanie w domenie z-transformaty:
Jeśli Z(x[n]) = X(z) oraz ROC: r
1
< |z| < r
2
, to:
Z a
n
x [n]= X a
−
1
z; ROC :∣a∣r
1
∣
z∣∣a∣r
2
Dowód:
Z a
n
x [n]=
∑
n=−∞
∞
a
n
x [n] z
−
n
=
∑
n=−∞
∞
x [ n]a
−
1
z
−
n
=
X a
−
1
z
Ponieważ ROC z-transformaty wynosi r
1
< |z| < r
2
, zatem ROC z-transformaty
przeskalowanej:
ROC : r
1
∣
a
−
1
z∣r
2
ROC :∣a∣r
1
∣
z∣∣a∣r
2
22 (37)
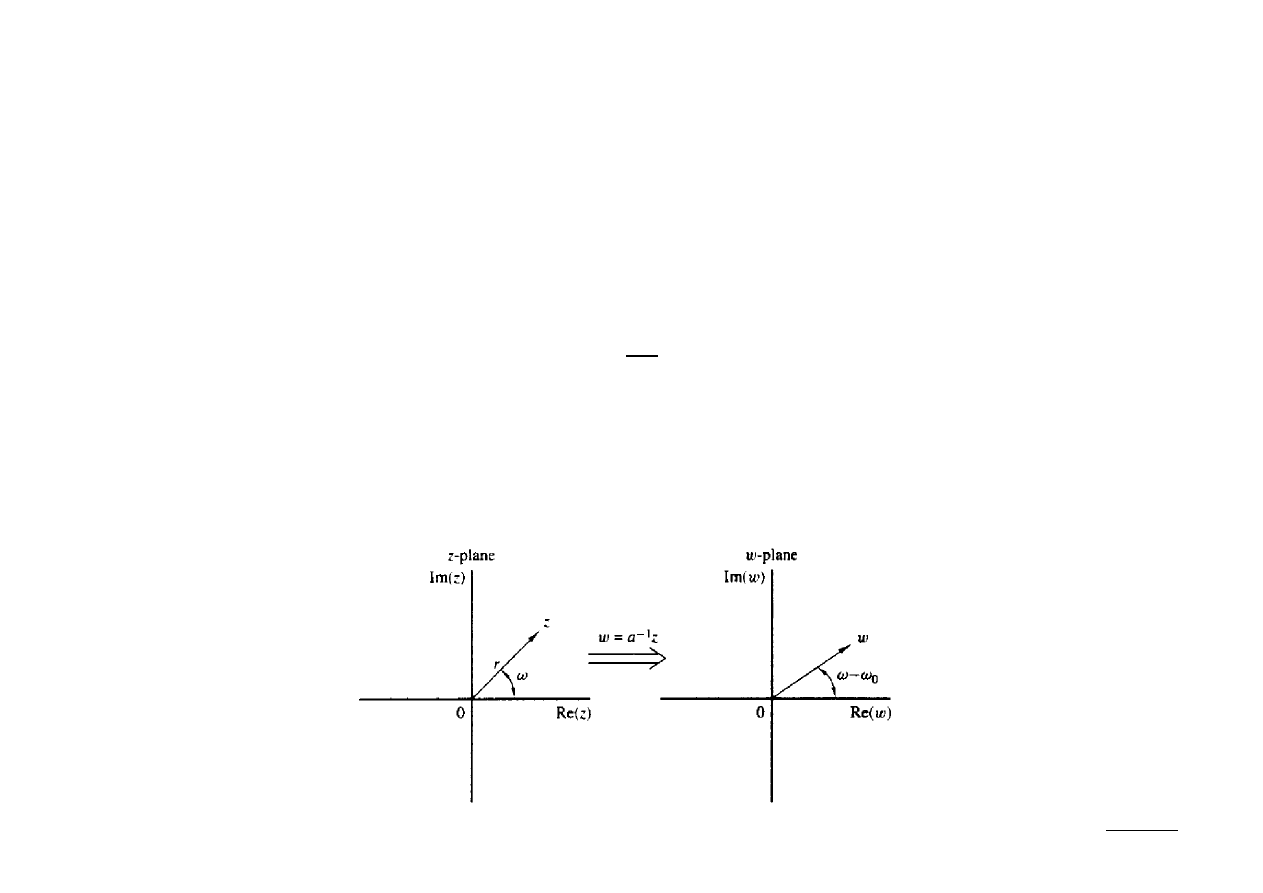
Aby lepiej zrozumieć powyższy wynik wyraźmy zmienne a oraz z we
współrzędnych biegunowych:
a=r
0
e
i 2 f
0
; z=r e
i 2 f
; w=a
−
1
⋅
z
Wówczas:
w=a
−
1
z=
r
r
0
e
i 2 f − f
0
Zamiana zmiennych prowadzi w efekcie do zwężenia bądź poszerzenia
płaszczyzny z w połączeniu z obrotem jej osi (jeśli f
0
≠ 2kπ).
23 (37)
Ex.: Wyznaczyć z-transformatę sygnału:
x [n]=a
n
cos2 f nu[n]
Korzystając ze skalowalności z-transformaty i wiedząc, że:
Z cos2 f n⋅u[ n]=
1−z
−
1
cos2 f n
1−2z
−
1
cos2 f nz
−
2
; ROC :∣z∣1
Otrzymujemy, że poszukiwana z-transformata ma postać:
Z a
n
cos2 f n⋅u[n]=
1−a⋅z
−
1
cos2 f n
1−2az
−
1
cos2 f na
2
z
−
2
; ROC :∣z∣a
24 (37)
(4) z-transformata zawinięcia sygnału:
Jeśli Z(x[n]) = X(z) oraz ROC: r
1
< |z| < r
2
, to:
Z x [−n]= X z
−
1
; ROC :
1
r
2
∣
z∣
1
r
1
Dowód:
Z x [−n]=
∑
n=−∞
∞
x [−n] z
−
n
=
∑
k =−∞
∞
x [ k ] z
k
=
∑
k =−∞
∞
x [k ] z
−
1
−
k
ROC z-transformaty zawiniętej:
ROC : r
1
∣
z
−
1
∣
r
2
ROC :
1
r
2
∣
z∣
1
r
1
Powyższa własność wynika z faktu, iż zawinięcie sygnału powoduje zamianę
współczynników z → z
-1
w z-transformacie, a więc zawinięcie w dziedzinie czasu
wiąże się z odwrotnością w dziedzinie z-transformaty.
25 (37)

Ex.: Wyznaczyć z-transformatę sygnału: x[n] = u[-n]
Wiemy, że z-transformata skoku jednostkowego wynosi:
Z u[ n]=
1
1−z
−
1
Korzystając z twierdzenia o zawijalności z-transformaty:
Z u[−n]=
1
1− z
; ROC :∣z∣1
26 (37)
(5) różniczkowalność w dziedzinie z-transformaty:
Jeśli Z(x[n]) = X(z) oraz ROC: r
1
< |z| < r
2
, to:
Z n⋅x [n]=−z⋅
dX z
dz
; ROC : r
1
∣
z∣r
2
Dowód:
d
dz
X z =
∑
k =−∞
∞
x [k ]⋅−n z
−
n−1
=−
z
−
1
∑
k=−∞
∞
n⋅x [ k ] z
−
k
=−
z
−
1
Z n⋅x [n]
Zauważmy, że obie z-transformaty mają identyczne ROC.
27 (37)
Ex.: Wyznaczyć z-transformatę sygnału x[n] = na
n
u[n].
Rozdzielmy sygnał x[n] na 2 części: x
1
[n] = a
n
u[n] oraz x
2
[n] = n x
1
[n].
z-transformata sygnału x
1
[n] ma postać:
Z a
n
⋅
u[n]=
1
1−a⋅z
−
1
; ROC :∣z∣∣a∣
Z twierdzenia o różniczkowalności w dziedzinie z-transformaty otrzymujemy, że:
Z n⋅x
1
[
n]=−z
−
1
d
dz
1
1−az
−
1
=
z
−
1
az
−
1
1−az
−
1
2
; ROC :∣z∣∣a∣
28 (37)
Ex.: Wyznaczyć sygnał x[n], którego z-transformata X(z) = log(1+az
-1
), |z| > |a|
Obliczmy pochodną X(z):
d
dz
ln 1az
−
1
=−
az
−
2
1az
−
1
Skąd otrzymujemy, że:
−
z
d
dz
X z=−az
−
1
1
1az
−
1
=
az
−
1
1
1−−a z
−
1
Odwrotną z-transformatą (1-(-a)z
-1
)
-1
jest (-a)
n
u[n], ponieważ jednak wyrażenie to
jest mnożone przez z
-1
, więc musimy wziąć cofniętą odwrotną z-transformatę:
n⋅x [n]=a⋅−a
n−1
⋅
u[n−1]
Stąd ostatecznie:
x [n]=
a
n
−
a
n−1
⋅
u[n−1]=−1
n−1
a
n
n
⋅
u[n−1]
29 (37)

(6) z-transformata splotu sygnałów:
Jeśli Z(x
1
[n]) = X
1
(z), Z(x
2
[n]) = X
2
(z), to:
Z x [ n]=x
1
[
n]∗x
2
[
n]= X
1
z⋅X
2
z
Dowód:
X z =
∑
k =−∞
∞
x [ k ] z
−
k
=
∑
k=−∞
∞
∑
j=−∞
∞
x
1
[
j ]⋅x
2
[
k− j] z
−
k
=
...
...=
∑
j=−∞
∞
x
1
[
j ]
∑
k =−∞
∞
x
2
[
k − j] z
−
k
=
∑
j=−∞
∞
x
1
[
j]⋅z
−
j
⋅
X
2
z = X
1
z ⋅X
2
z
Transformowalność splotu jest jedną z najważniejszych własności z-transformaty,
ponieważ pozwala zamienić operację obliczania splotu (w dziedzinie czasu) na
operację mnożenia z-transformat (przydatne np. przy filtracji sygnału).
30 (37)

Ex.: Wyznaczyć splot sygnałów:
x
1
[
n]=[1 ,−2,1]
x
2
[
n]=u[n]−u[n−6]
Wyznaczmy z-transformaty obu sygnałów:
X
1
z =1−2z
−
1
z
−
2
X
2
z =1z
−
1
z
−
2
z
−
3
z
−
4
z
−
5
Po wymnożeniu z-transformat otrzymujemy:
X z = X
1
z⋅X
2
z=1−z
−
1
−
z
−
6
z
−
7
Stąd odwrotna z-transformata splotu ma postać:
x [n]=[1 ,−1,0,0 ,0 ,0 ,−1,1]
31 (37)
(6) z-transformata korelacji sygnałów:
Jeśli Z(x
1
[n]) = X
1
(z), Z(x
2
[n]) = X
2
(z), to:
Z r
x
1
x
2
=
X
1
z⋅X
2
z
−
1
Dowód:
Przypomnijmy, że:
r
x
1
x
2
=
x
1
[
n]∗x
2
[−
n]
Stąd:
Z r
x
1
x
2
=
Z x
1
[
n]⋅Z x
2
[−
n]= X
1
z⋅X
2
z
−
1
Podobnie jak w przypadku splotu, obliczenia korelacji są efektywniejsze
w dziedzinie z-transformaty niż w dziedzinie czasu.
32 (37)
Ex.: Wyznaczyć korelację własną sygnału:
x [n]=a
n
u[n] ;∣a∣1
Obliczmy z-transformatę korelacji własnej:
Z r
x x
=
X z ⋅X z
−
1
=
1
1−az
−
1
⋅
1
1−az
; ROC :∣a∣∣z∣
1
∣
a∣
Odwrotną z-transformatę obliczymy korzystając z wcześniejszych wyników, że:
Z
a
n
u[n]
1
a
n
u[−n−1]
=
Z
a
∣
n∣
=
1−a
2
1−az
−
1
⋅
1−az
Stąd otrzymujemy, że:
r
xx
[
n]=
a
∣
n∣
1−a
2
; n∈ℤ
33 (37)

(7) z-transformata iloczynu sygnałów:
Jeśli Z(x
1
[n]) = X
1
(z), Z(x
2
[n]) = X
2
(z), to:
Z x
1
⋅
x
2
=
1
2 i
∮
C
X
1
v⋅X
2
z
v
v
−
1
dv
gdzie: C jest zamkniętym konturem leżącym wewnątrz ROC wspólnego dla X
1
(v)
oraz X
2
(1/v).
Twierdzenie pozostawiam bez dowodu.
Użyteczność tego wzoru wynika z jego stosowalności do sygnałów o skończonym
czasie trwania, których widma modyfikowane są skończonymi (z uwagi na
fizyczne ograniczenia czasu trwania sygnału) funkcjami okien.
34 (37)

(8) twierdzenie o wartości początkowej:
Jeśli x[n] jest sygnałem przyczynowym, to:
x [0]= lim
z ∞
X z
Dowód:
Ponieważ x[n] jest sygnałem przyczynowym (x[n<0] = 0), to:
X z =
∑
k =0
∞
x [k ]⋅z
−
k
=
x [0] x [1]⋅z
−
1
x [ 2]⋅z
−
2
...
z ∞
x [0]
35 (37)
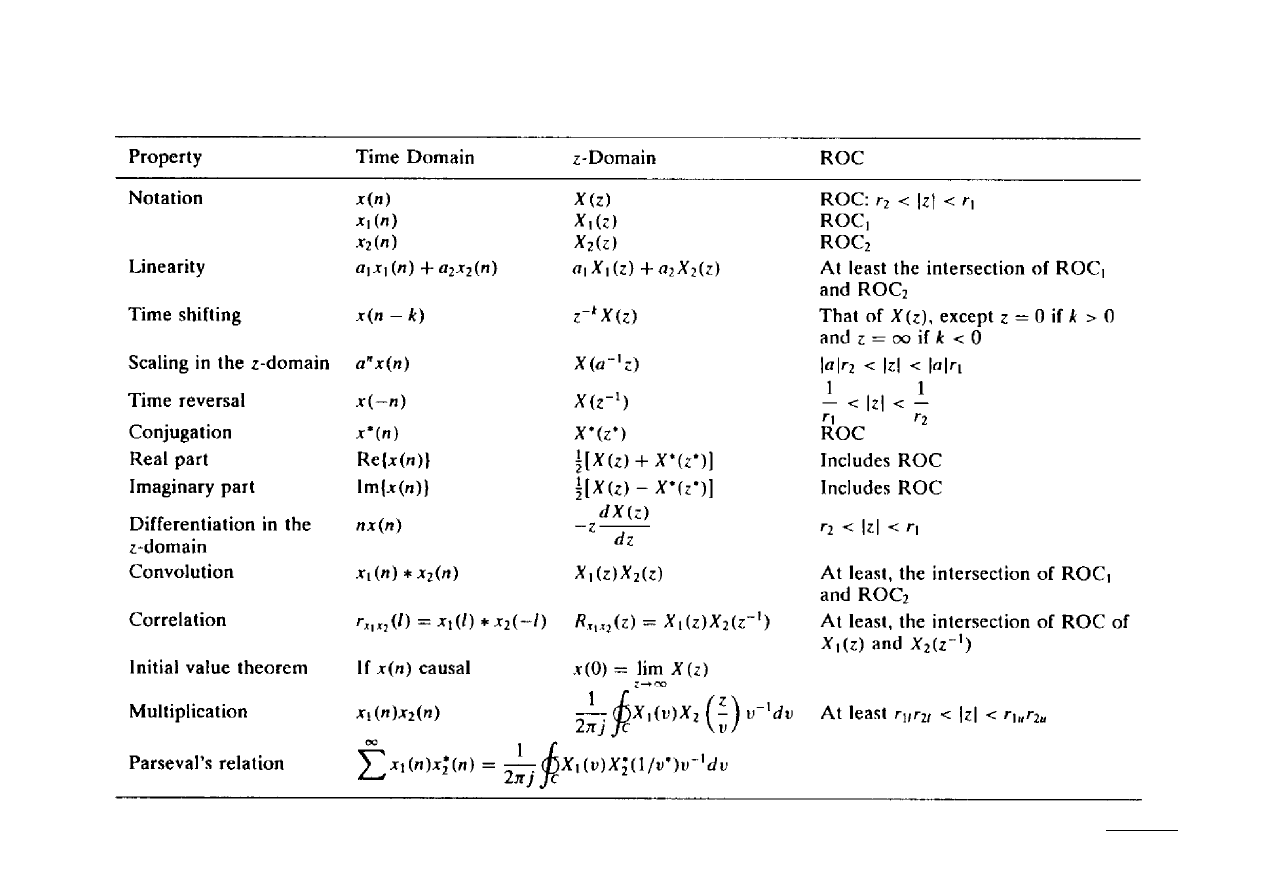
Podsumowanie: własności z-transformaty
36 (37)
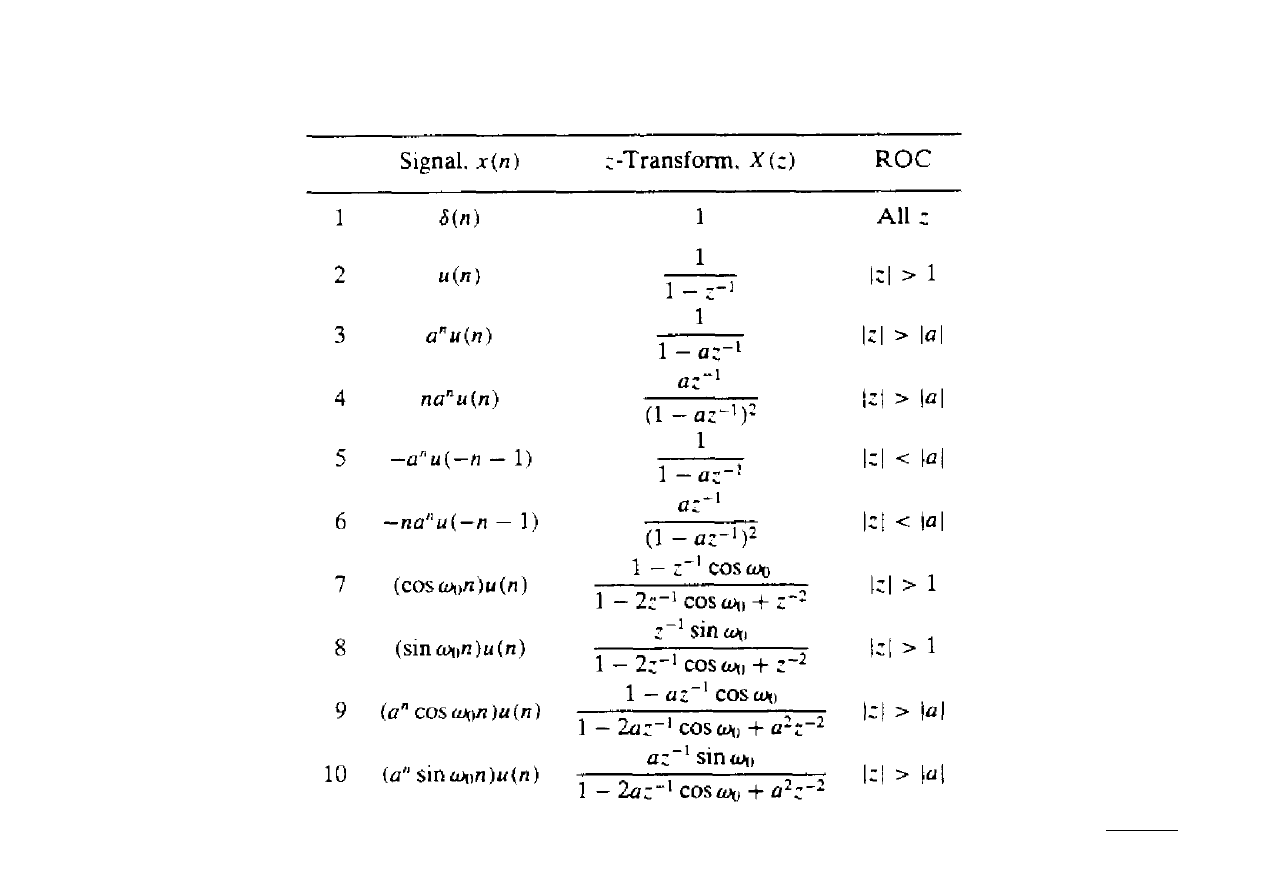
Podsumowanie: wybrane pary z-transformat
37 (37)
Wyszukiwarka
Podobne podstrony:
DSP Wyk%b3ad 04 UWM
DSP Wyk%b3ad 02 UWM
DSP Wyk%b3ad 08 UWM
DSP Wyk%b3ad 11 UWM
DSP Wyk%b3ad 10 UWM
DSP Wyk%b3ad 05 UWM
DSP Wyk%b3ad 09 UWM
DSP Wyk%B3ad 01 UWM
DSP Wyk%b3ad 03 UWM
DSP Wyk%b3ad 13 UWM
DSP Wyk%b3ad 06 UWM
DSP Wyk%b3ad 04 UWM
więcej podobnych podstron