
Sławomir Kulesza
Cyfrowe przetwarzanie sygnałów (3)
Wykład dla studentów I roku (N)SMU WMiI
Specjalność: Techniki multimedialne
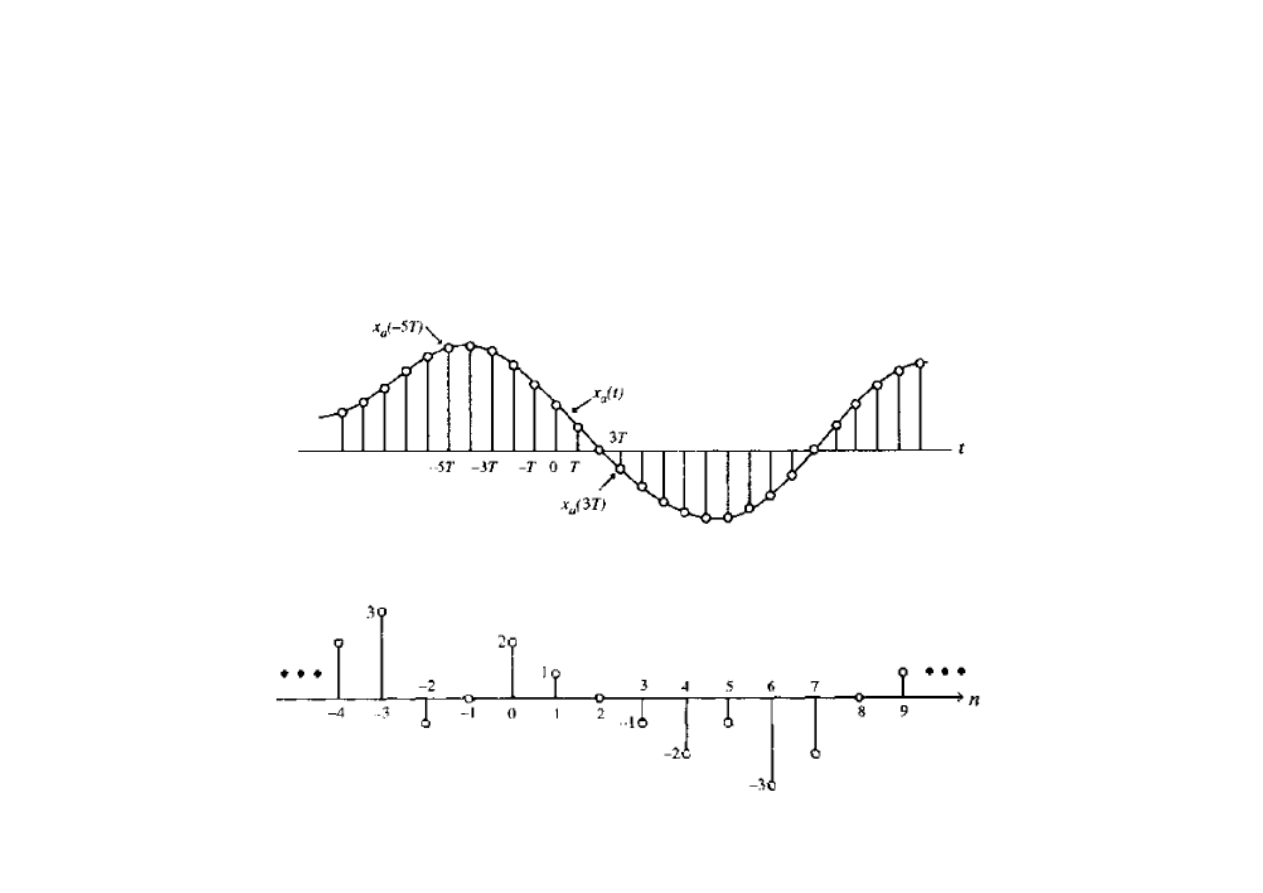
Sygnały dyskretne w czasie (Discrete-Time Signals)
Sygnałem dyskretnym w czasie określa się ponumerowany ciąg liczb
rzeczywistych lub zespolonych – jest to funkcja x[n], której argumentami są liczby
całkowite n. Do tej grupy należą sygnały próbkowane i sygnały cyfrowe:
Zmienna niezależna n nie musi reprezentować wyłącznie czasu (może np.
opisywać współrzędne przestrzenne) – ważne, iż ciąg x [n] jest zdefiniowany
wyłącznie dla całkowitych wartości n (nie znamy jego wartości między próbkami).
Wygodnie jest założyć, że ciąg x[n] jest zdefiniowany dla wszystkich liczb
całkowitych n
∈
(-
∞
,
∞
) oraz nazywać n-ty jego wyraz 'n-tą próbką', nawet jeśli
sygnał x[n] nie powstał przez próbkowanie sygnału analogowego.
Jeśli x(n) jest zbiorem próbek sygnału analogowego x
a
(t), wówczas zachodzi:
x [n]= x
a
t∣
t=n⋅T
=
x
a
n⋅T
;
T =
1
F
s
gdzie: T [s] – jest okresem próbkowania (odstępem czasowym pomiędzy
kolejnymi próbkami sygnału – próbkowanie równomierne), zaś F
s
[Hz] – jest
częstotliwością próbkowania.
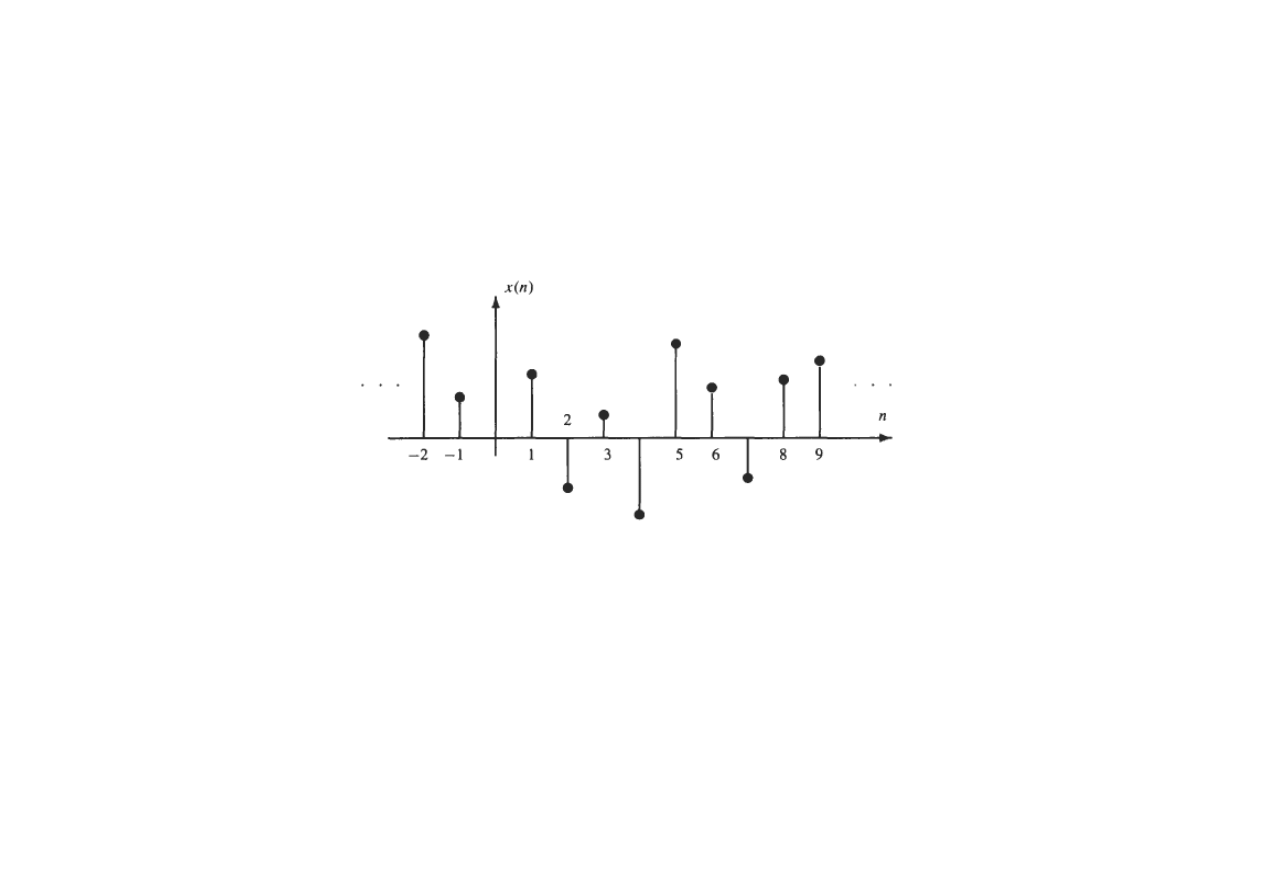
Reprezentacje czasowe sygnałów dyskretnych w czasie
1) Reprezentacja graficzna:
2) Reprezentacja funkcyjna:
x [n]=
{
1⇔n=−1,0,1
2⇔n=2, 3
0 dla pozostałych n
}
3) Reprezentacja tabelaryczna:
n
...
-2
-1
0
1
2
3
4
...
x[n]
...
0
1
1
1
2
2
0
...
4) Reprezentacja ciągowa:
–
ciąg nieskończony:
x [n]=
{
... 1 1 1 2 2 ...
}
–
ciąg skończony:
x [n]=
{
1 1 1 2 2
}
Długość sygnału dyskretnego w czasie
Sygnały dyskretne w czasie mogą być ciągami skończonymi lub nieskończonymi.
Ciąg skończony zdefiniowany jest dla liczb n z pewnego skończonego zakresu:
−∞
N
1
≤
n≤N
2
∞
Długość N tego ciągu wynosi:
N = N
2
−
N
1
1
Ciąg taki określa się jako N-punktowy. Każdy ciąg skończony można wydłużyć
przypisując próbkom o numerach spoza powyższego zakresu wartości zerowe.
Wydłużanie ciągu przez uzupełnianie próbkami zerowymi to tzw. zero-padding.
Ciągi przyczynowe i antyprzyczynowe
Zasadniczo wyróżnia się 3 typy ciągów nieskończonych:
–
ciągi prawostronne, dla których x [n < N
1
] = 0, w tym także ciągi przyczynowe
(causal sequences), dla których N
1
≥ 0.
–
ciągi lewostronne, dla których x [n > N
2
] = 0, w tym także ciągi
antyprzyczynowe (anti-causal sequences), dla których N
2
≤ 0.
–
ciągi obustronne, ograniczone próbkami o wartości zero z obu stron.
Wielkość sygnału dyskretnego w czasie
Zdefiniujmy L
p
- normę ciągu x[n] jako liczbę:
∥
x∥
p
=
∑
n=−∞
∞
∣
x [n]∣
p
1
p
, p∈ℤ
Zwykle używa się wartości p = 1, 2 lub ∞.
Z powyższej definicji wynika, że:
–
L
1
– norma (|| x ||
1
) jest równa średniej z wartości bezwzględnych ciągu x [n],
–
L
2
– norma (|| x ||
2
) jest równa pierwiastkowi średniej kwadratowej wartości ciągu
x [n] (tzw. wartość skuteczna, rms – root mean squared),
–
L
∞
– norma (|| x ||
∞
= | x |
max
) jest równa szczytowej wartości bezwzględnej ciągu
x [n].
Zastosowania L
p
– normy:
oszacowanie błędu aproksymacji sygnału
Zdefiniowana powyżej norma może służyć jako estymata wielkości sygnału.
Jeśli np. N-punktowy ciąg y[n] jest przybliżeniem N-próbkowego ciągu x[n]
(0 ≤ n ≤ N-1), to względny błąd tej aproksymacji jest równy stosunkowi L
2
– normy
sygnału różnicowego do L
2
– normy sygnału oryginalnego:
rel
=
∑
n=0
N −1
∣
y [ n]− x [n]∣
2
∑
n=0
N −1
∣
x [n]∣
2
1
2

Klasyfikacja sygnałów dyskretnych w czasie
Sygnały czasu dyskretnego mogą być klasyfikowane na wiele sposobów.
Wcześniej omówiony został podział ze względu na liczbę próbek definiujących
ciąg (ciągi skończone i nieskończone), ale możliwe są także podziały z uwagi na:
–
symetrię ciągu,
–
okresowość,
–
sumowalność,
–
wartość energii i mocy.
Podział sygnałów z uwagi na symetrię
Ciąg zespolony x[n] jest ciągiem sprzężonym symetrycznie (conjugate-
symmetric) wtedy, gdy: x[n] = x
*
[-n]. Ciąg rzeczywisty o takiej własności określa
się mianem ciągu parzystego (even sequence).
Ciąg zespolony x[n] jest ciągiem sprzężonym antysymetrycznie (conjugate-
antisymmetric) wtedy, gdy: x[n] = -x
*
[-n]. Ciąg rzeczywisty o takiej własności jest
ciągiem nieparzystym (odd sequence). W tym przypadku Re(x [0]) = 0.
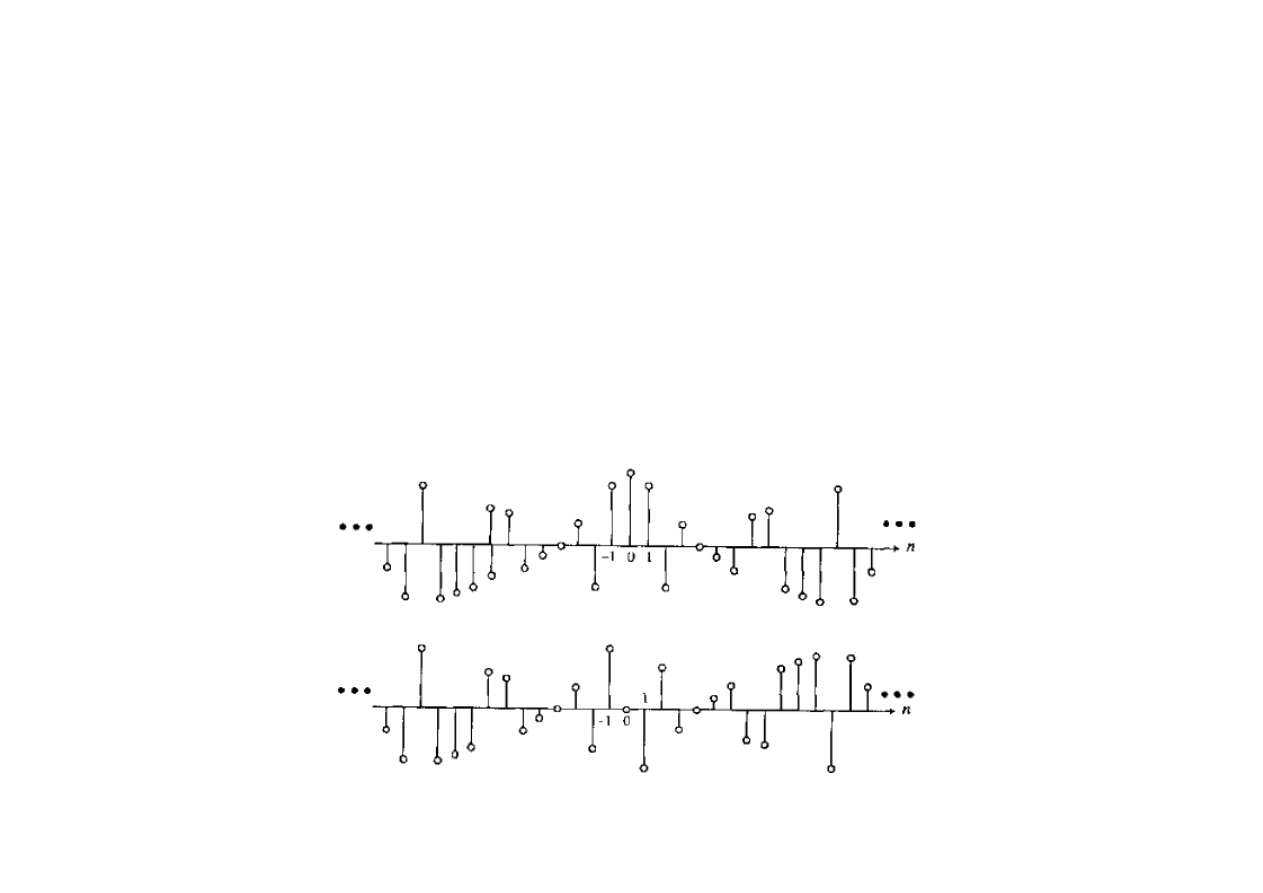
Rozwijanie ciągów rzeczywistych
Dowolny rzeczywisty ciąg x[n] można wyrazić jako sumę jego części parzystej
x
parz
[n]
i nieparzystej x
np
[n]:
x [n]= x
parz
[
n] x
np
[
n]
x
parz
[
n]=
1
2
x [n] x [−n]
x
np
[
n]=
1
2
x [n]− x [−n]
Możliwość wydzielenia składowej parzystej i nieparzystej ciągu x[n] jest istotna
z punktu widzenia własności transformat (np. transformaty Fouriera).
Sygnały periodyczne i aperiodyczne
Ciąg x[n] jest periodyczny z okresem N > 0 wtedy i tylko wtedy, gdy:
∀
N
x [ nN ]= x [n]
Najmniejszą wartość N, dla której powyższy warunek jest spełniony, nazywamy
okresem podstawowym sygnału periodycznego.
Sygnał, który nie spełnia powyższego warunku dla dowolnego N jest sygnałem
aperiodycznym (nieokresowym).
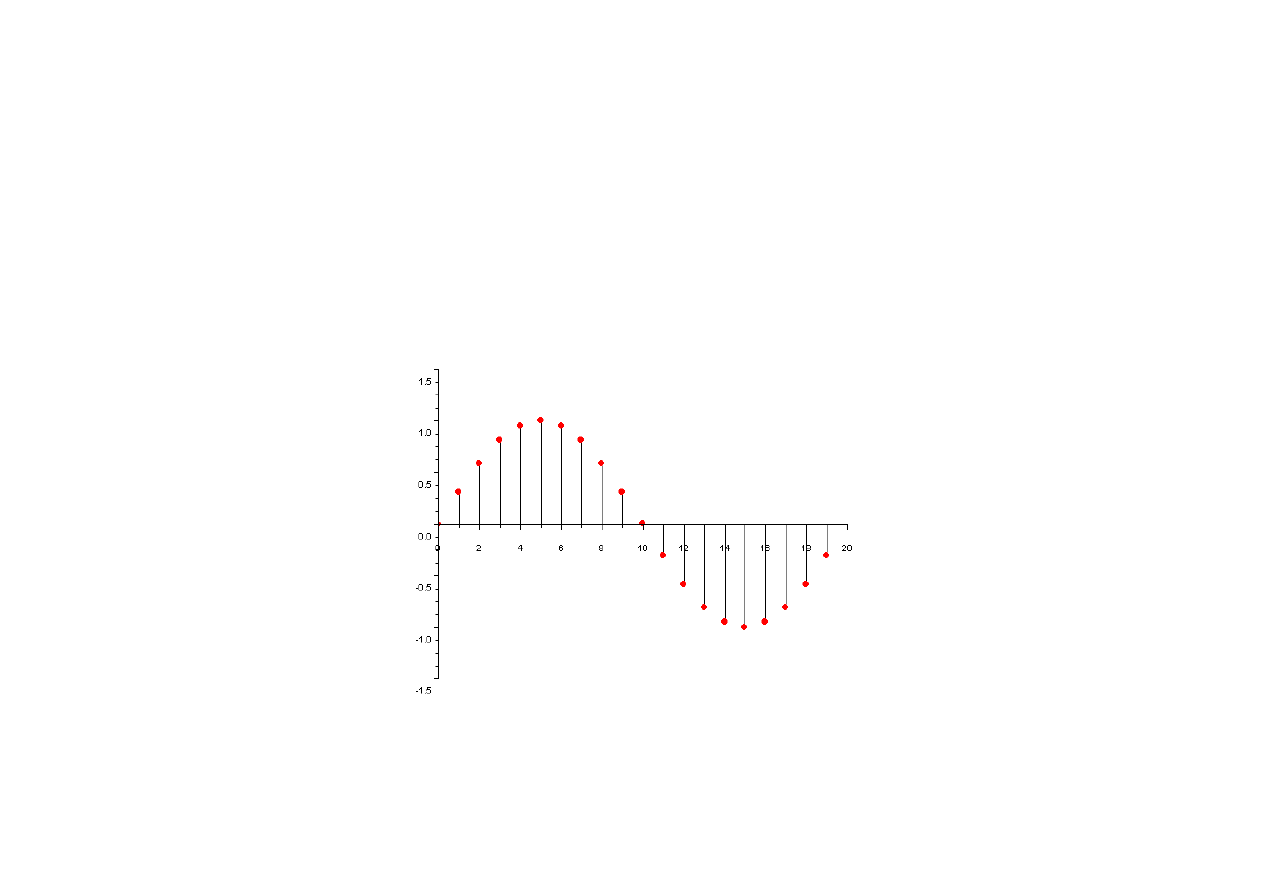
Sygnały sinusoidalne czasu dyskretnego
Dyskretny w czasie ciąg sinusoidalny można wyrazić w postaci:
x [n]= A⋅sin ⋅n=A⋅sin 2⋅⋅f ⋅n; n∈−∞ ,∞
gdzie: A – jest amplitudą ciągu, ω – jego częstością [rad/sample],
f - częstotliwością [cykli/sample] zaś φ – fazą początkową.
Sinusoida o f = 0.05 ckl/sam, ω = 0.1π rad/sam, φ = 0 rad.

Własności sygnałów sinusoidalnych czasu dyskretnego
Sygnały sinusoidalne czasu dyskretnego posiadają własności istotnie
odróżniające je od podobnych sygnałów czasu ciągłego.
(1) Sygnały sinusoidalne czasu dyskretnego są okresowe wtedy i tylko
wtedy, gdy ich częstotliwości f są ułamkami właściwymi:
Z definicji, sygnał czasu dyskretnego jest okresowy z okresem N > 0 wtedy i tylko
wtedy, gdy dla każdego n:
x [n + N] = x [n]
Najmniejsza wartość N spełniająca powyższy warunek to okres podstawowy.

Dowód:
Aby sinusoida o częstotliwości f była periodyczna, musi zachodzić:
sin 2⋅⋅f ⋅nN =sin 2⋅⋅ f ⋅n
Powyższy warunek jest prawdziwy, gdy istnieje taka liczba całkowita k, że:
2⋅⋅f ⋅N =2⋅k⋅
Skąd mamy, że:
f =
k
N
Aby wyznaczyć okres podstawowy N ciągu sinusoidalnego należy wyrazić jego
częstotliwość w postaci ułamka, w którym k i N są względnie pierwsze. Wówczas
okres podstawowy równy jest wartości N.
Uwaga! Niewielka zmiana częstotliwości może powodować silne zmiany okresu
podstawowego: por.: f
1
= 31/60 (N = 60) oraz f
2
= 30/60 (N = 2).
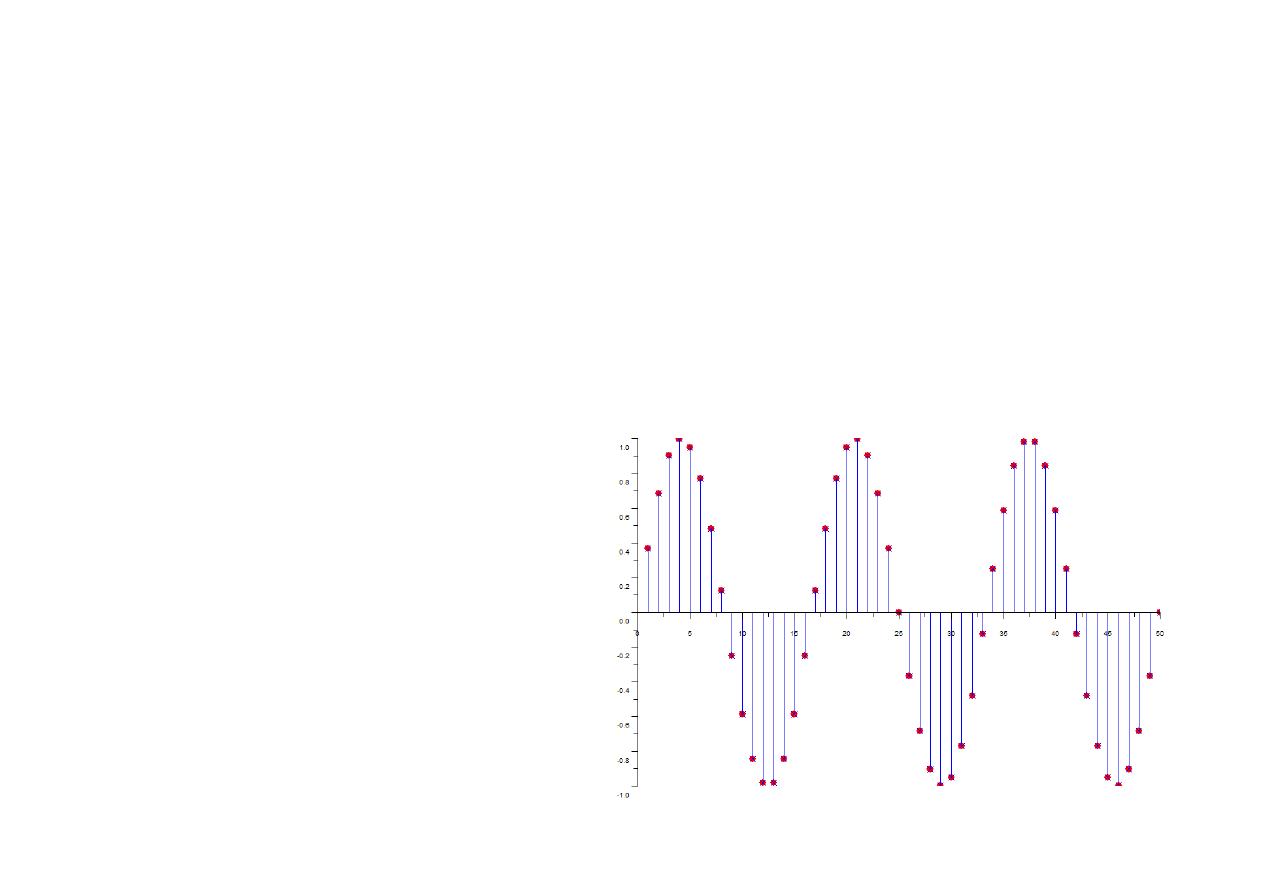
(2) Ciągi sinusoidalne czasu dyskretnego, których częstotliwości różnią się
pełną wielokrotnością 2π są identyczne:
Sprawdźmy identyczność dwóch ciągów sinusoidalnych:
sin
2⋅⋅n
=
sin
⋅
n2⋅⋅n
=
sin
⋅
n
Wynika stąd, że wszystkie ciągi sinusoidalne postaci:
x
k
[
n]=sin
k
⋅
n
; k =0,1, 2,...
gdzie:
k
=
02⋅k⋅ ,
0
∈[−
,]
są nierozróżnialne (identyczne).
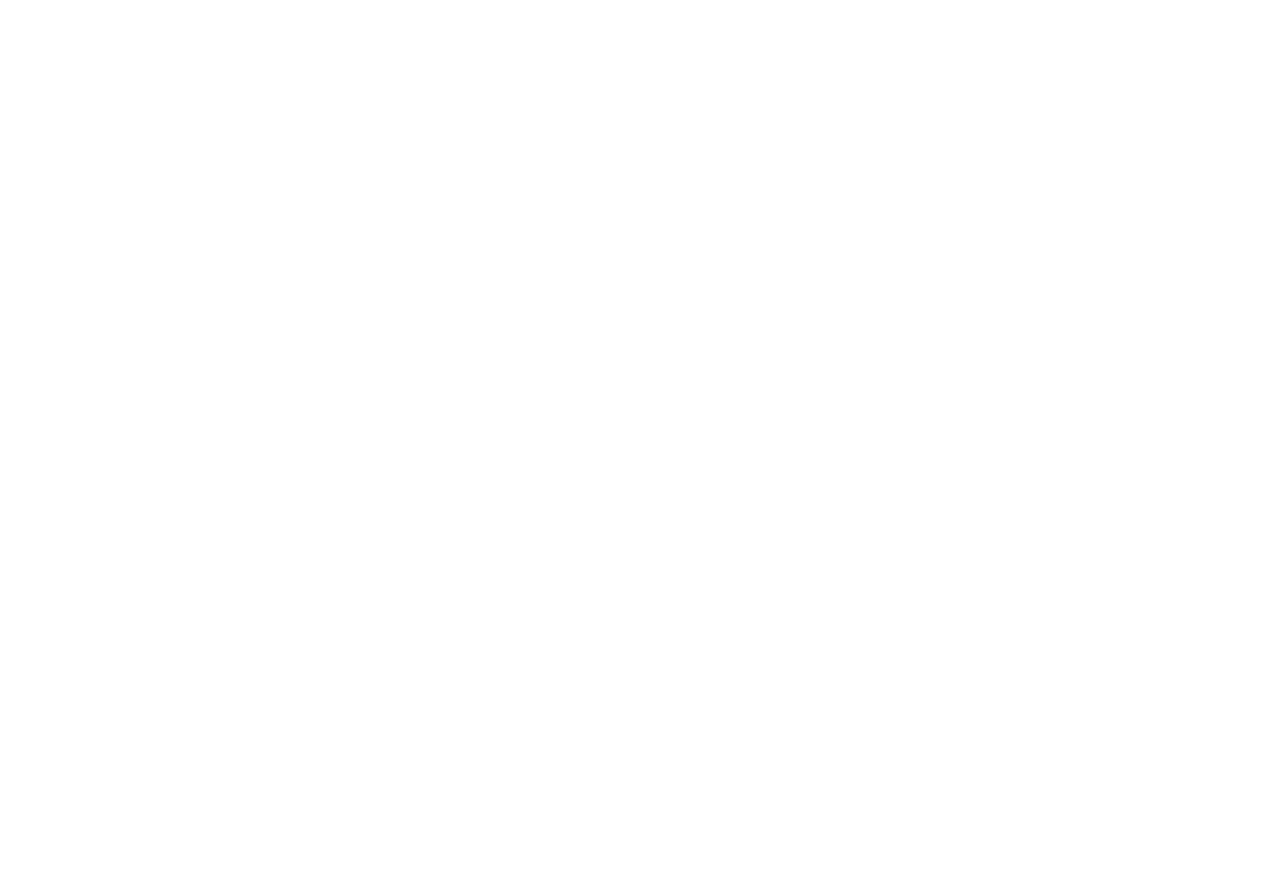
Rys. Ciągi sinusoidalne o N = 50,
f
1
= 3/50, f
2
= 1 + 3/50.
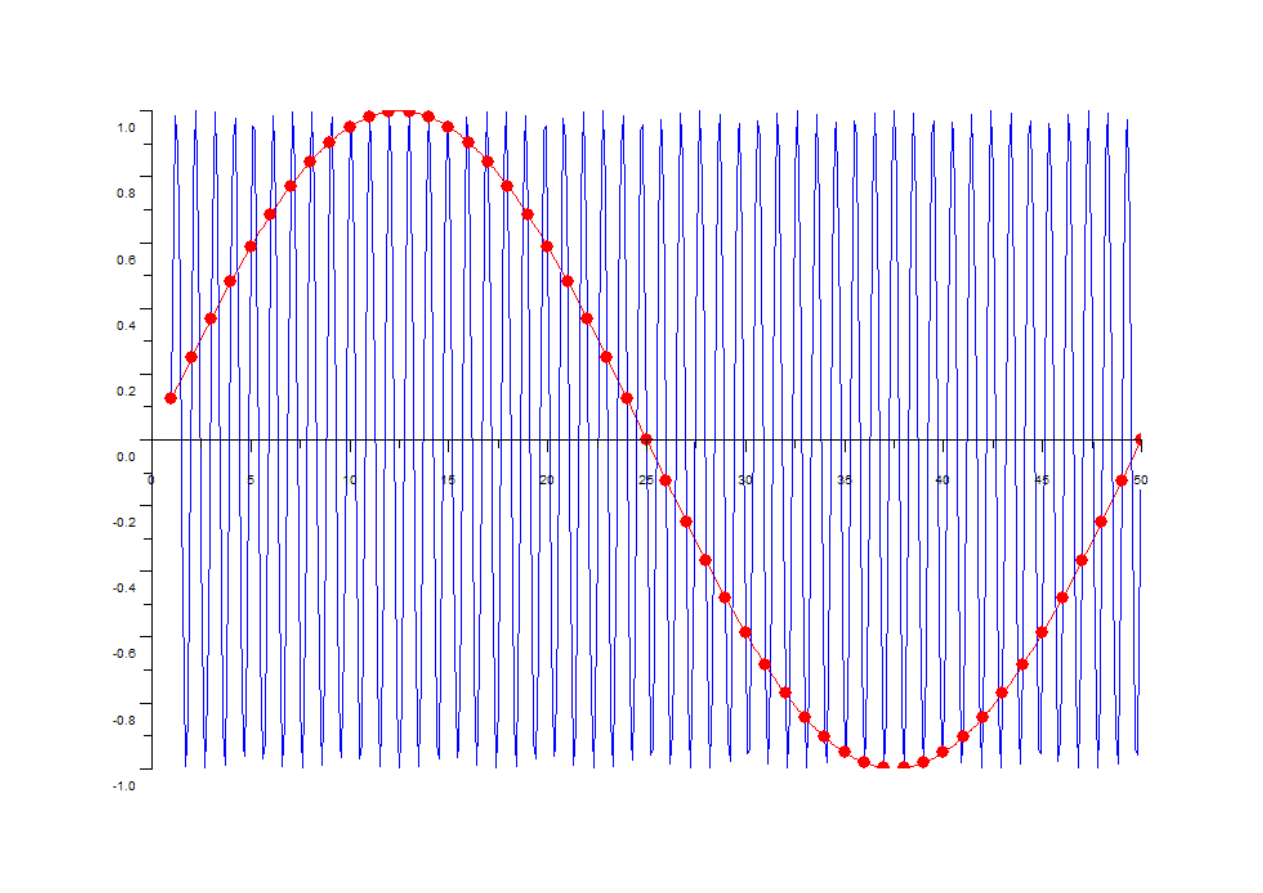

Aliasing
Z powyższej własności wynika, iż dwa ciągi sinusoidalne o częstościach
z przedziału: (- π ≤ ω ≤ π) lub (- 0.5 ≤ f ≤ 0.5) są rozróżnialne.
Wynika stąd, iż dla każdego ciąg sinusoidalnego o częstotliwości | f | ≥ 0.5 istnieje
ciąg o częstotliwości | f | ≤ 0.5. Z uwagi na opisywaną identyczność, ciąg
o częstotliwości | f | ≥ 0.5 jest nazywany aliasem odpowiadającego mu ciągu
o częstotliwości | f | ≤ 0.5. Jest to cecha istotnie odróżniająca sygnały sinusoidalne
czasu dyskretnego od sygnałów czasu ciągłego.
Oznacza to m.in., że próbkowanie sygnału nie jest procesem odwracalnym,
a więc nie zawsze jest możliwe odtworzenie oryginalnego sygnału analogowego
na podstawie jego próbek – próbkowanie powoduje w pewnych warunkach
częściową lub nawet całkowitą utratę informacji.
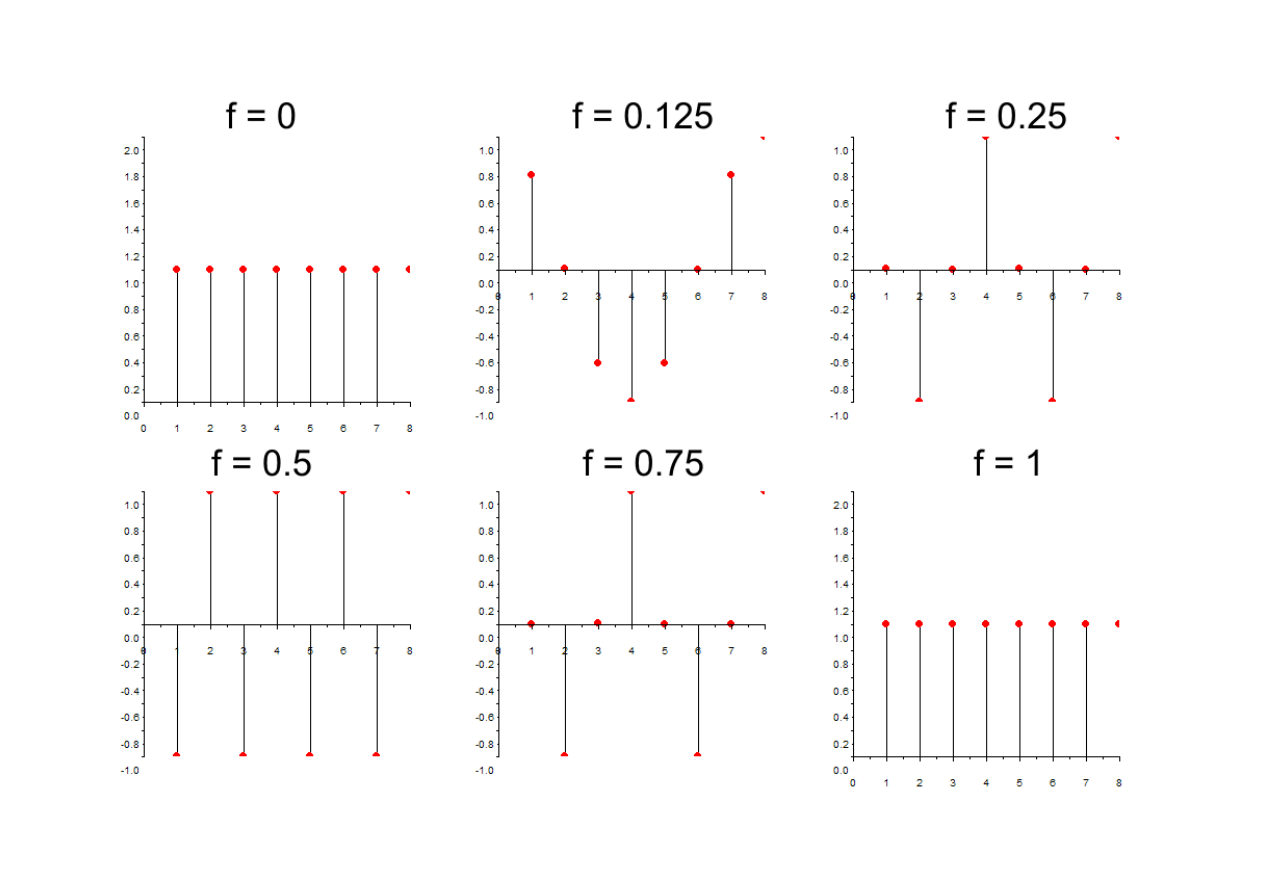
(3) Największa szybkość zmian sygnału sinusoidalnego czasu dyskretnego
odpowiada wartości | f | = 0.5:
Zbadajmy własności ciągu sinusoidalnego postaci:
x [n]=sin
2⋅⋅f ⋅n
gdzie:
f =0,
1
8,
1
4,
1
2,
3
4,
1
Aby sprawdzić zachowanie ciągu sinusoidalnego dla częstotliwości 0.5 ≤ f ≤ 1,
rozważmy dwie częstotliwości: f
0
oraz f
1
= (1 – f
0
) (| f
0
| ≤ 0.5):
x
0
[
n]=sin
2⋅⋅f
0
⋅
n
x
1
[
n]=sin
2⋅⋅f
1
⋅
n
=
sin
2⋅⋅1− f
0
⋅
n
=
sin
−
2⋅⋅f
0
⋅
n
=−
x
0
[
n]

Zespolone ciągi wykładnicze czasu dyskretnego
Podobnie jak ciągi sinusoidalne, zespolone ciągi wykładnicze czasu dyskretnego
są okresowe, gdy ich częstotliwość wyraża się ułamkiem właściwym. Wybierzmy
zatem częstotliwość podstawową f
0
= 1/N (N – liczba próbek ciągu) i zdefiniujmy
zbiór harmonicznych, zespolonych ciągów wykładniczych:
s
k
[
n]=e
i⋅2⋅⋅k⋅f
0
⋅
n
; k ∈ℤ
Zauważmy, że:
s
k N
[
n]=e
i⋅2⋅⋅k N ⋅f
0
⋅
n
=
e
i⋅2⋅⋅k⋅f
0
⋅
n
⋅
e
i⋅2⋅⋅N⋅f
0
⋅
n
=
e
i⋅2⋅⋅k⋅f
0
⋅
n
⋅
s
k
[
n]=s
k
[
n]
Oznacza to, że w zbiorze {s
k
[n]} istnieje dokładnie N-różnych zespolonych ciągów
eksponencjalnych, z których każdy posiada okres równy N.

Jeśli zatem wybierzemy zbiór ciągów:
s
k
[
n]=e
i⋅2⋅⋅k⋅n / N
; k =0,1, 2,... , N −1.
Wówczas kombinacja liniowa:
x [n]=
∑
k=0
N −1
c
k
⋅
s
k
[
n]=
∑
k =0
N −1
c
k
⋅
e
2⋅⋅k⋅n/ N
jest również ciągiem periodycznym o okresie podstawowym N. Ciąg ten jest
identyczny z dyskretnym szeregiem Fouriera o współczynnikach {c
k
}.

Ciągi aperiodyczne czasu dyskretnego
W dalszej części przedstawione zostaną wybrane aperiodyczne ciągi czasu
dyskretnego, które odgrywają istotną rolę w analizie i projektowaniu układów
z dyskretnym czasem. Możliwe jest np. wyrażenie dowolnego sygnału jako
kombinacji tychże sygnałów podstawowych lub poklasyfikowanie układów
z dyskretnym czasem w zależności od ich odpowiedzi na pewne ciągi
podstawowe.
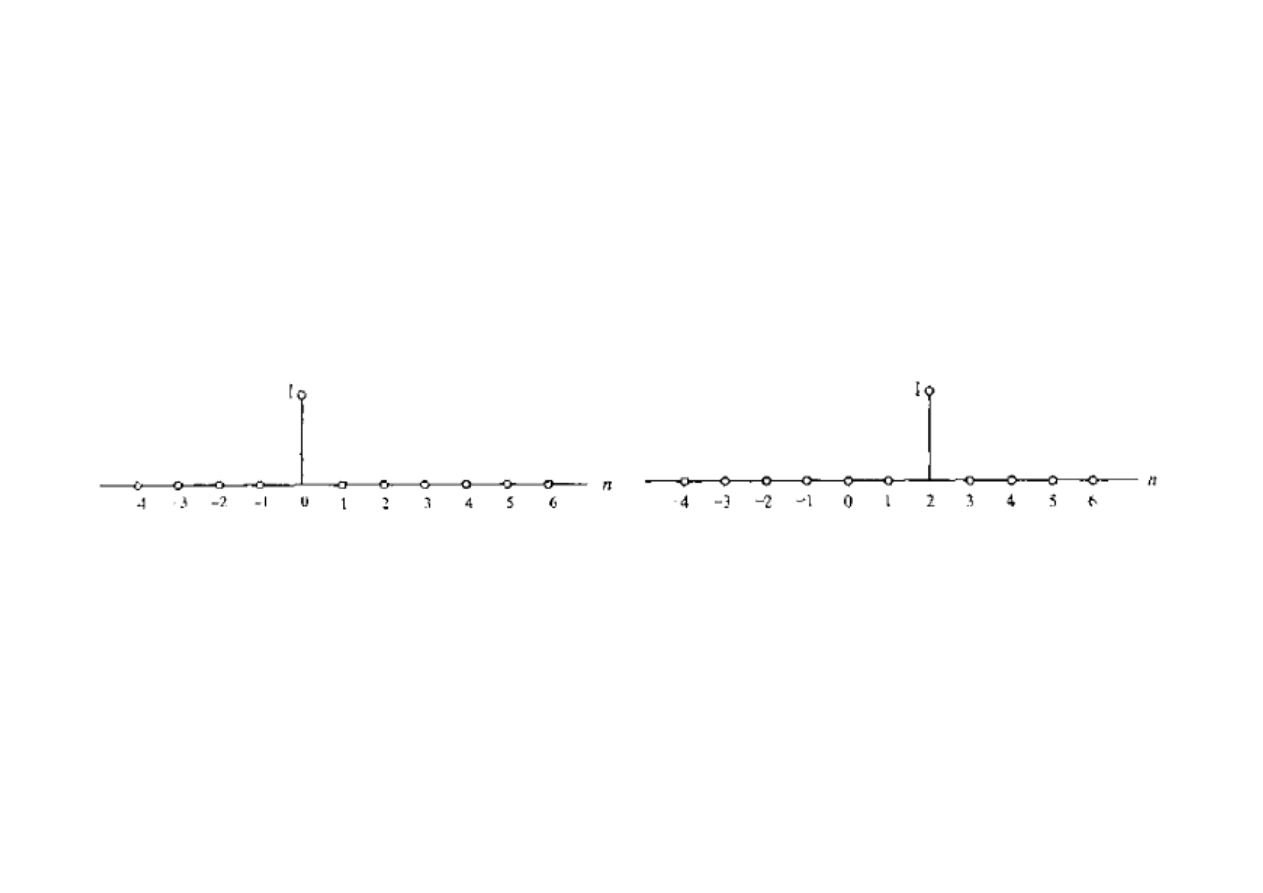
Impuls jednostkowy
Najprostszym i jednym z najbardziej użytecznych jest ciąg zwany impulsem
czasu dyskretnego lub impulsem jednostkowym δ[n]:
[
n]=
{
1⇔ n=0
0⇔ n≠0
}
,
[
n−k ]=
{
1⇔ n=k
0 ⇔n≠k
}
Dowodzi się, że każdy ciąg można przedstawić jako sumę ważoną przesuniętych
impulsów jednostkowych oraz, że istnieją układy całkowicie charakteryzowane w
dziedzinie czasu poprzez ich odpowiedź na pobudzenie impulsem
jednostkowym.Co więcej, na tej podstawie można przewidzieć odpowiedź układu
na dowolne inne pobudzenie.
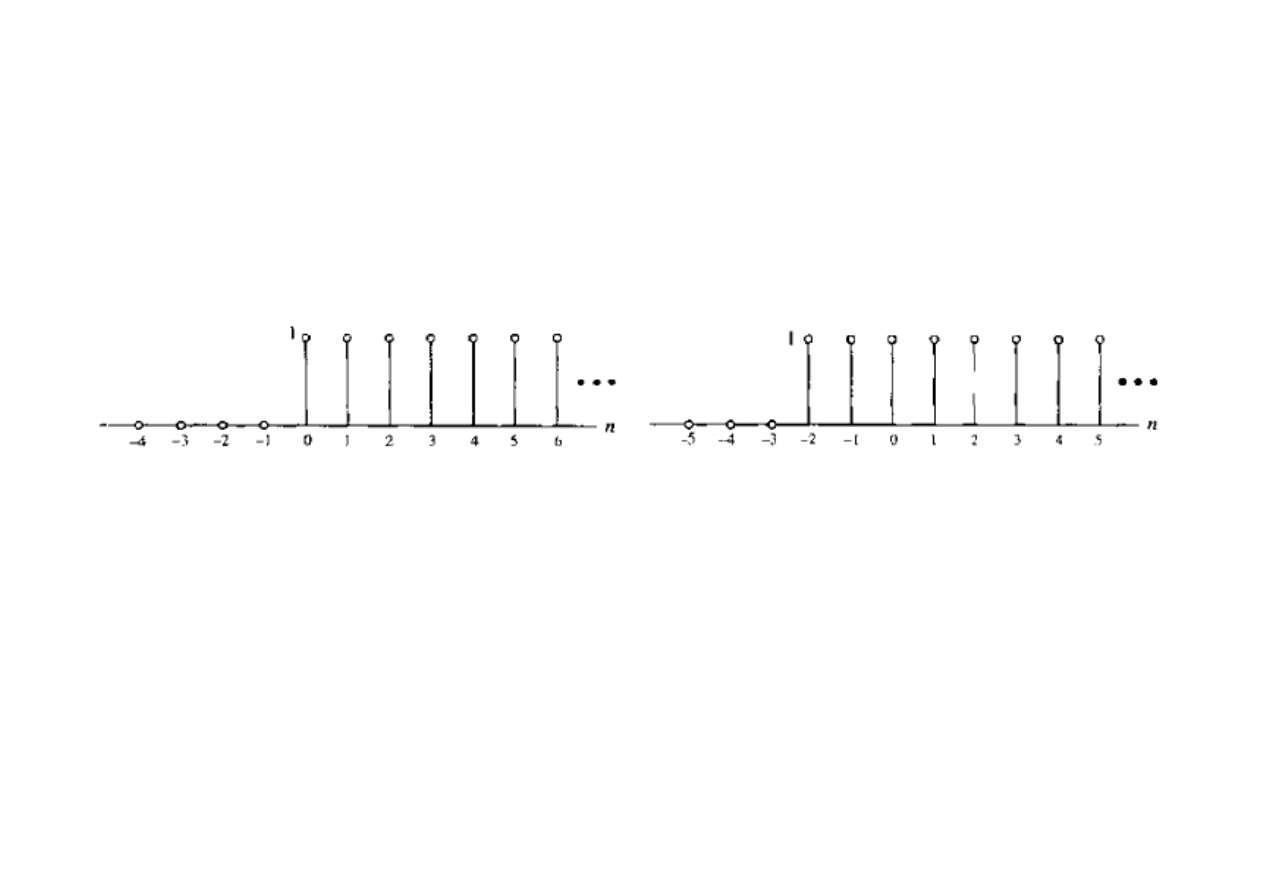
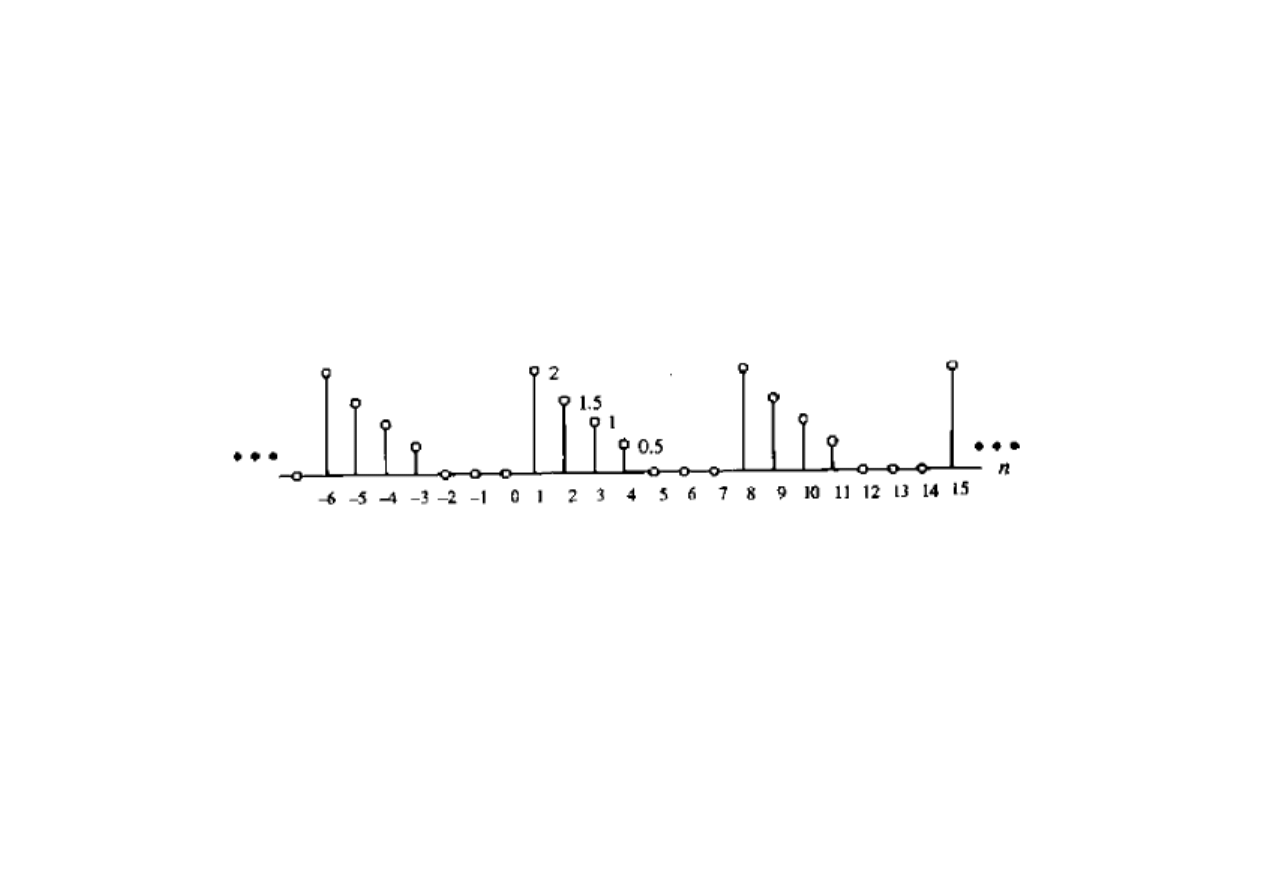
Skok jednostkowy
Skok jednostkowy μ[n] jest zdefiniowany jako:
[
n]=
{
1⇔ n≥0
0⇔ n0
}
,
[
n−k ]=
{
1⇔ n≥k
0⇔nk
}
Pomiędzy impulsem jednostkowym a skokiem jednostkowym istnieją następujące
zależności:
[
n]=
∑
m=0
∞
[
n−m]=
∑
k=−∞
n
[
k ]
[
n]=[n]−[ n−1]

Ciągi eksponencjalne czasu dyskretnego
Ciągi tego typu powstają po podniesieniu wartości n-tej próbki do n-tej potęgi
liczby rzeczywistej lub zespolonej:
x [n]= A⋅
n
; n∈−∞ ,∞ , A , ∈ℂ
W przypadku, gdy współczynniki α są liczbami zespolonymi postaci:
=
e
i⋅2⋅⋅k / N
ciągi eksponencjalne są wersjami ciągów sinusoidalnych czasu dyskretnego
uogólnionymi na przestrzeń liczb zespolonych.
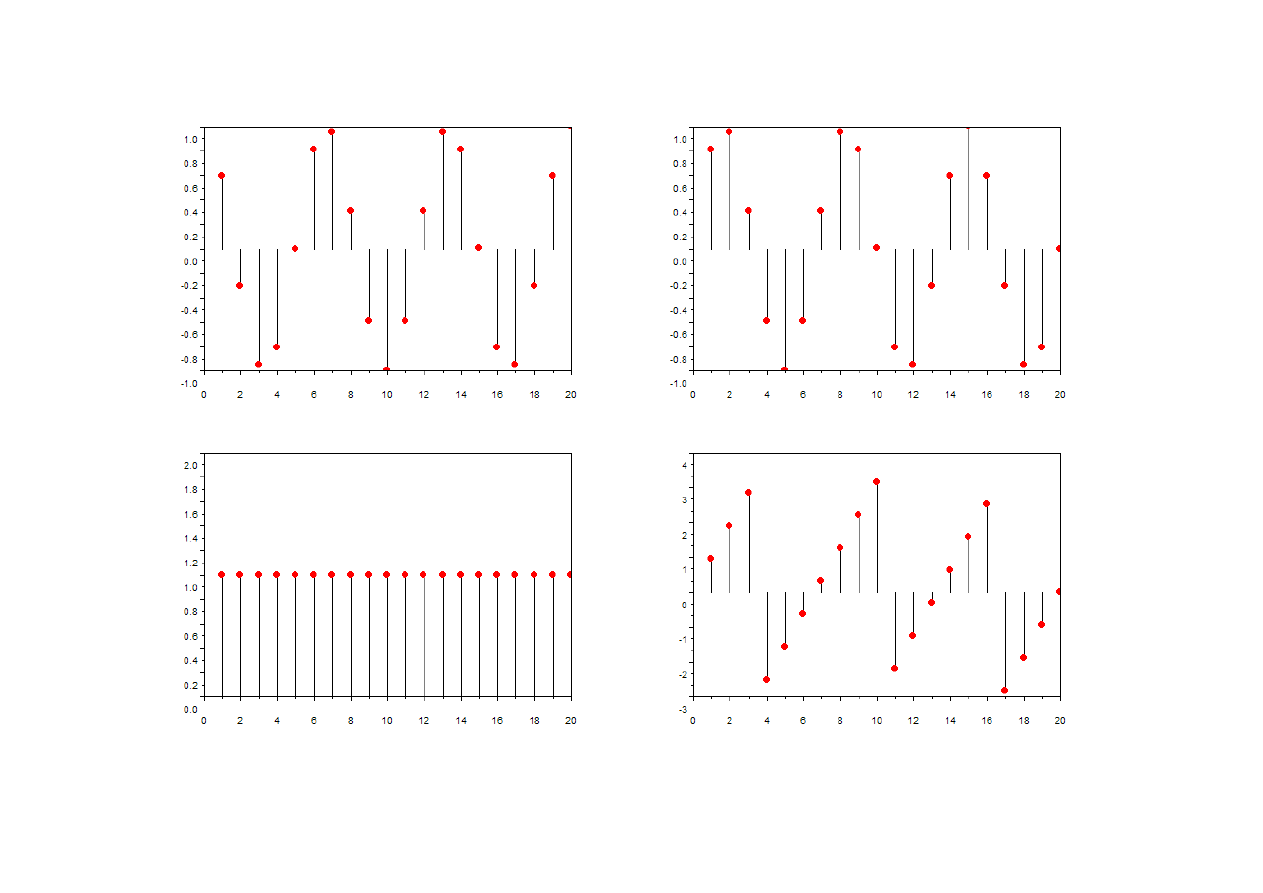
Wykresy Re(x), Im(x), Abs(x), φ(x) ciągu x[n] = exp(i·2·π·3·n/20)
Podstawowe operacje na sygnałach czasu dyskretnego:
transformacje zmiennej niezależnej (t. czasu)
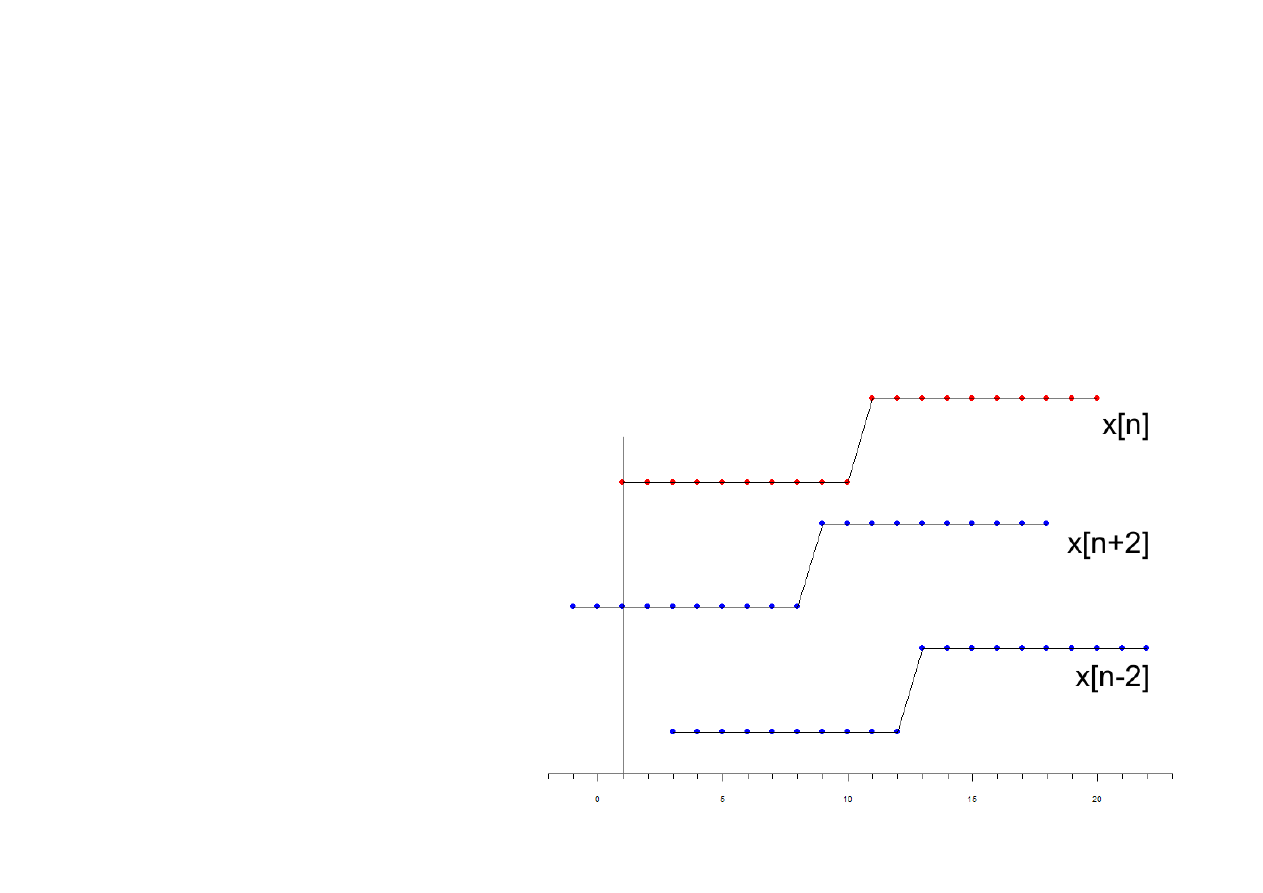
(1) Przesunięcie próbek w czasie:
Sygnał x[n] może zostać przesunięty w czasie po zamianie wartości zmiennej
n na (n-k), gdzie k jest liczbą całkowitą. Jeśli k>0, przesunięcie powoduje
opóźnienie sygnału o k-próbek,
jeśli zaś k<0 – sygnał ulega
przyspieszeniu o k-próbek.
W przypadku przetwarzania
sygnałów w czasie rzeczywis-
tym, operacja przyspieszania
podstawy czasu nie daje się
zrealizować fizycznie.
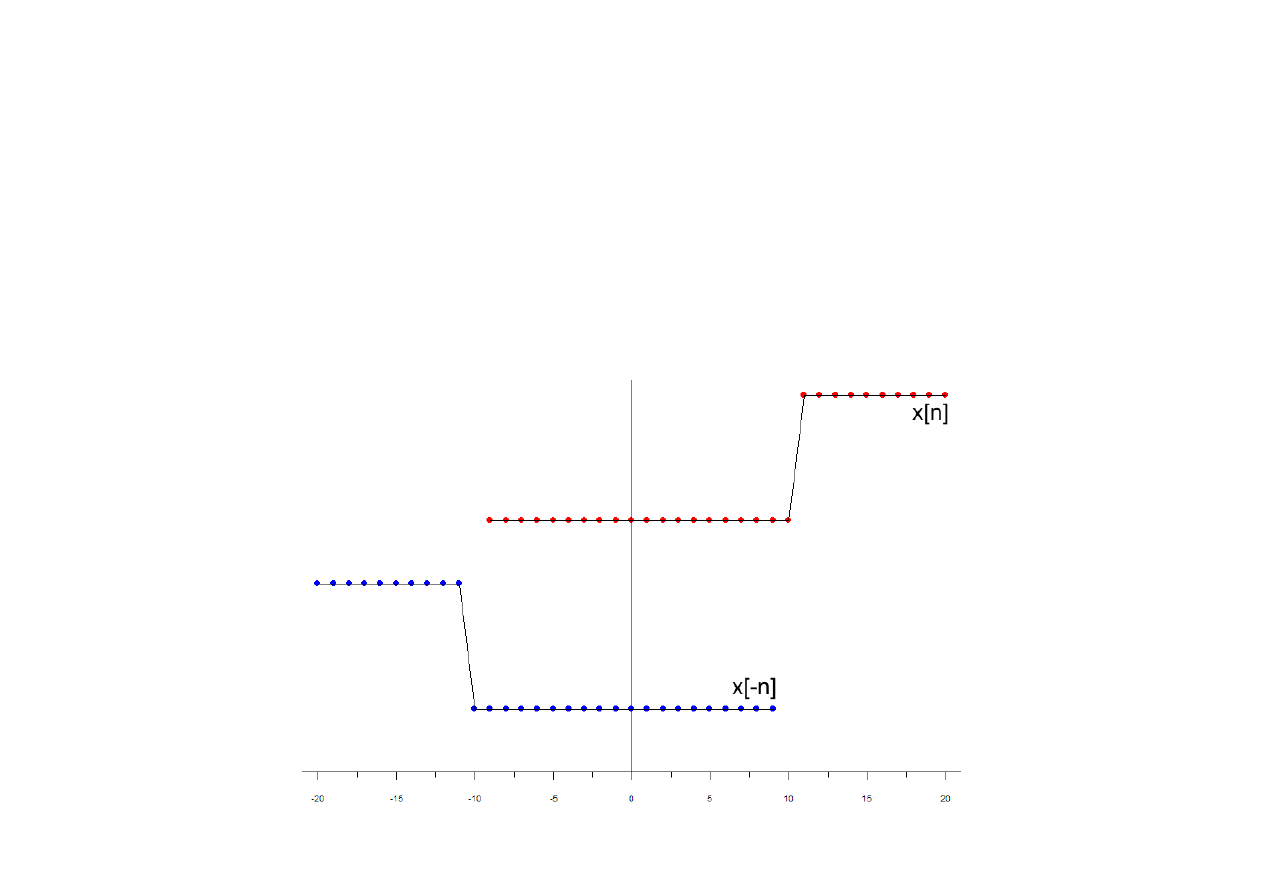
(2) Zawijanie ciągu próbek:
Zawijanie ciągu próbek (folding) polega na zamianie zmiennej n na (-n), skutkiem
czego sygnał ulega symetrycznemu odbiciu względem próbki n=0:
y [−1]= x [1] , y [0]=x [0] , y [1]= x [−1] ,...
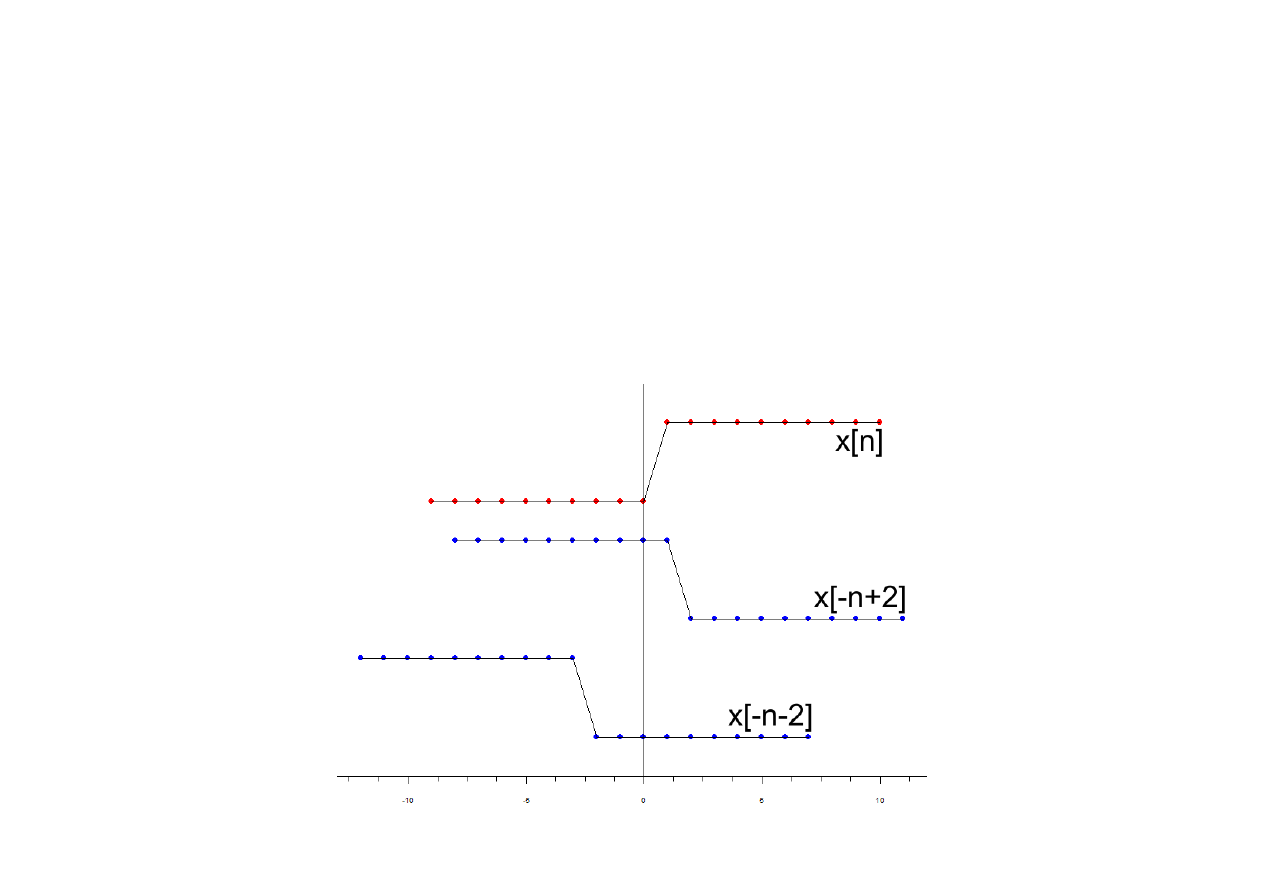
Przemienność operacji na zmiennej niezależnej
Zauważmy, iż operacje przesunięcia próbek sygnału w czasie (TS) oraz zawijania
sygnału (FD) nie są w ogólności przemienne. Zakładając, że k>0:
FDTS
k
x [n]=FD x [n−k ]= x [−nk ]
TS
k
FD x [n]=TS
k
x [−n]= x [−n−k ]

(3) Skalowanie podstawy czasu:
Skalowanie podstawy czasu powoduje zmianę częstotliwości próbkowania
sygnału, gdzie nowa częstotliwość próbkowania F
s
' dana jest jako:
F
s
' =R⋅F
s
, R∈ℤ
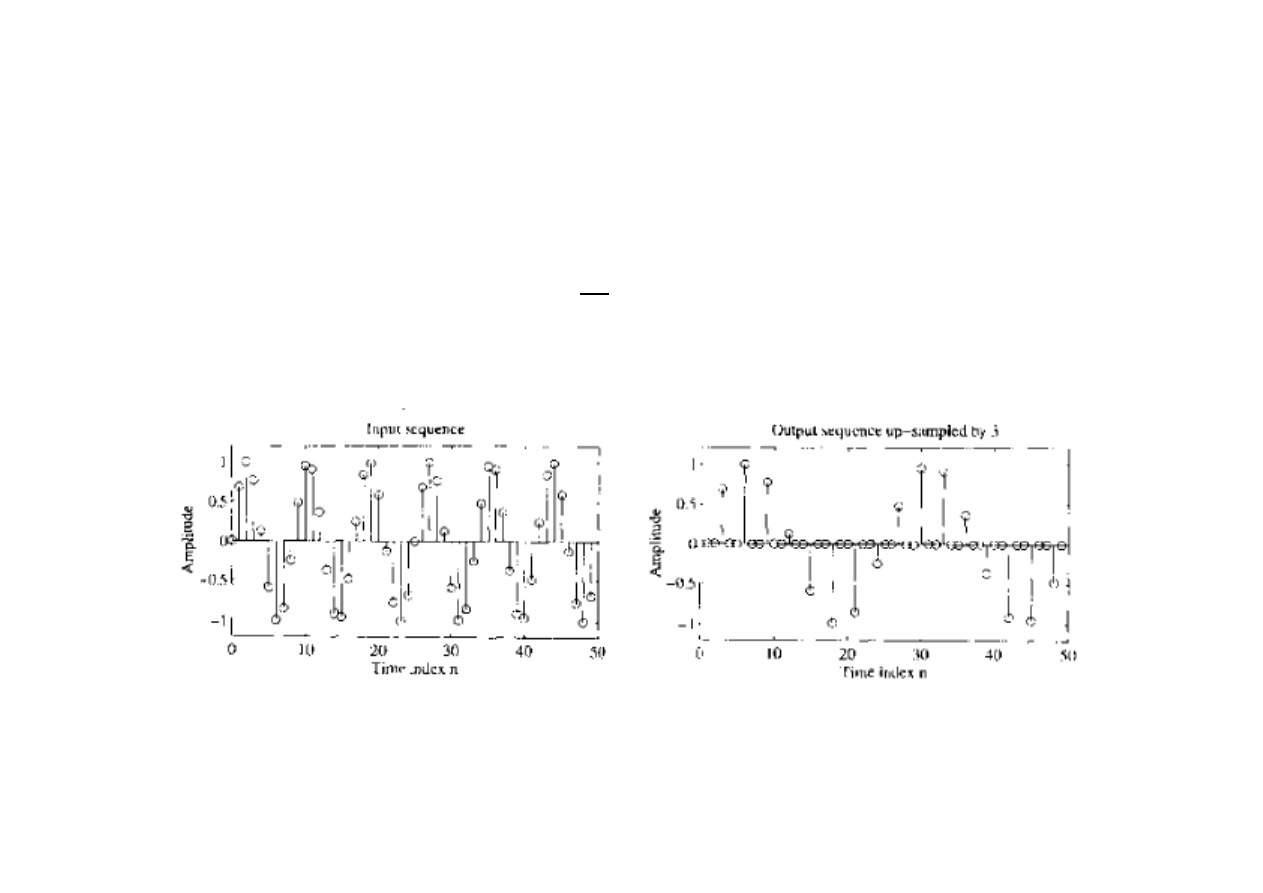
Jeśli R>1, mówimy o nadpróbkowaniu (up-sampling), kiedy to pomiędzy dwie
kolejne próbki ciągu x[n] wstawiane są (R-1) równoodległe próbki o wartościach
zero:
x
u
[
n]=
{
x
[
n
R
]
,∣n∣=0,1, 2,...
0∣n∣≠0,1, 2,...
}
Układ nadpróbkujący uzupełniony układem zamieniającym wstawiane próbki
zerowe na liniową kombinację próbek ciągu x[n] nazywa się interpolatorem.
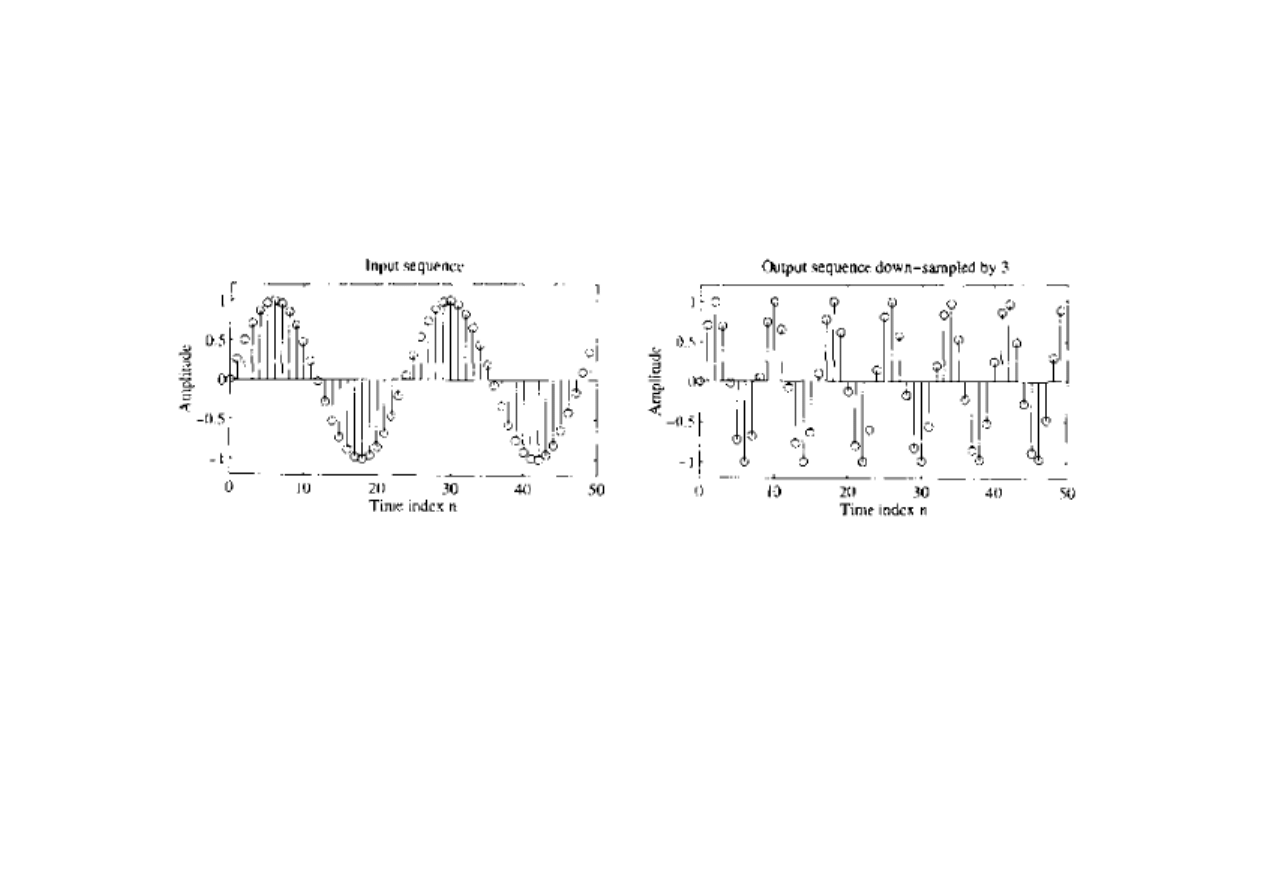
Jeśli R<1, mówimy o podpróbkowaniu (down-sampling), kiedy to z ciągu x[n]
wyjmowane są (R-1) próbki pozostawiając co R-tą próbkę oryginalną:
x
d
[
n]=x
[
n⋅R
]
Układ obniżający częstotliwość próbkowania sygnału nazywa się decymatorem.
Składa się on zwykle z modułu filtrującego, ograniczającego częstotliwość
sygnału podpróbkowanego (antyaliasing), który podaje następnie sygnał do
układu podpróbkującego.
Wyszukiwarka
Podobne podstrony:
DSP Wyk%b3ad 04 UWM
DSP Wyk%b3ad 02 UWM
DSP Wyk%b3ad 08 UWM
DSP Wyk%b3ad 07 UWM
DSP Wyk%b3ad 11 UWM
DSP Wyk%b3ad 10 UWM
DSP Wyk%b3ad 05 UWM
DSP Wyk%b3ad 09 UWM
DSP Wyk%B3ad 01 UWM
DSP Wyk%b3ad 13 UWM
DSP Wyk%b3ad 06 UWM
DSP Wyk%b3ad 04 UWM
więcej podobnych podstron