13. WSTĘP DO TEORII PLASTYCZNOŚCI
1
13.
13. WSTĘP DO TEORII PLASTYCZNOŚCI
13.1. TEORIA PLASTYCZNOŚCI
Teoria plastyczności zajmuje się analizą stanów naprężeń ciał, w których w wyniku działania
obciążeń powstają trwałe odkształcenia - DEFORMACJE.
CECHA PLASTYCZNOŚCI – trwałe deformacje po usunięciu przyczyn. Przykładem może być
rozciąganie próbki w jednoosiowym stanie naprężeń.
13.2. MODELE CIAŁA SPRĘŻYSTO PLASTYCZNEGO
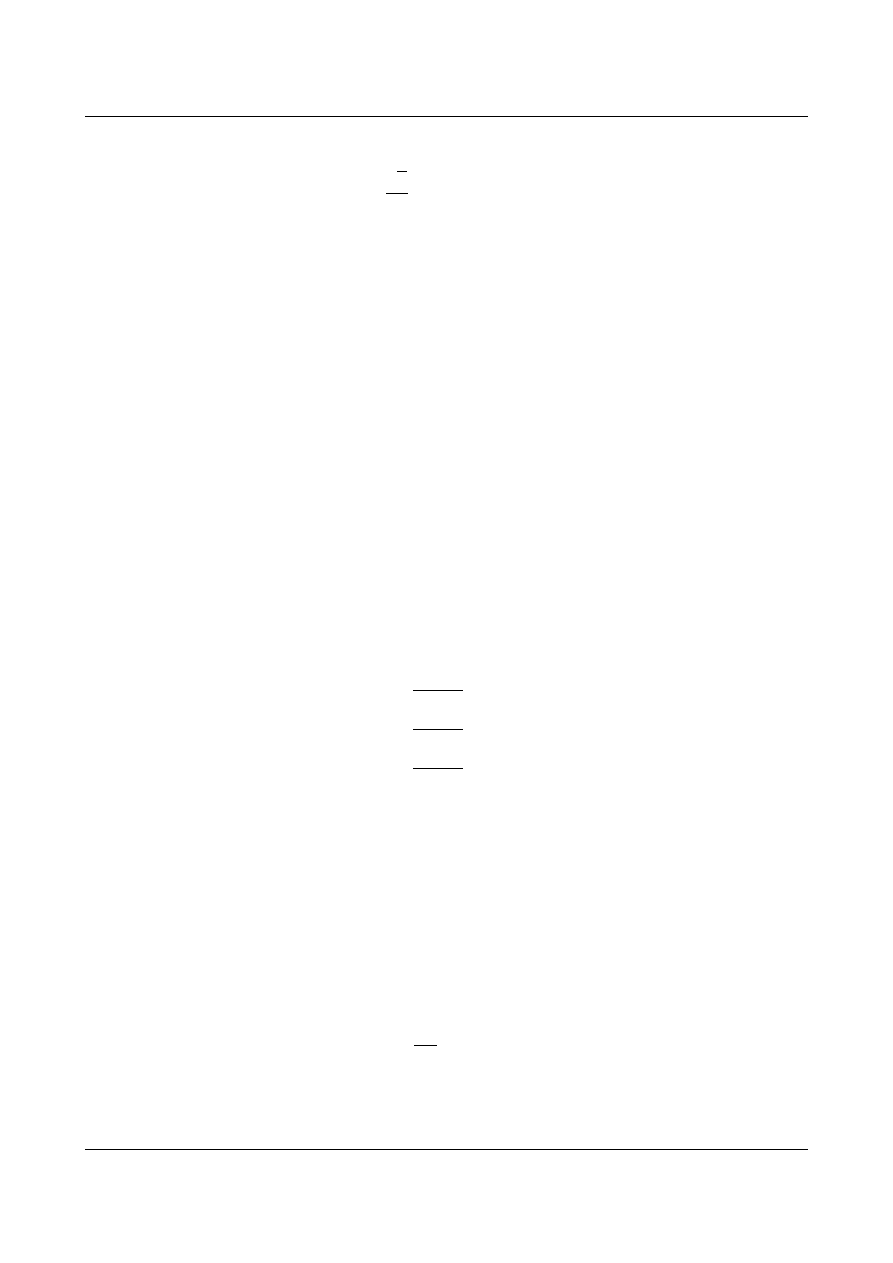
CIAŁO SPRĘŻYSTO – PLASTYCZNE to ciało, dla którego zależność odkształceń od naprężeń jest
zgodna z jednym z poniższych wykresów.
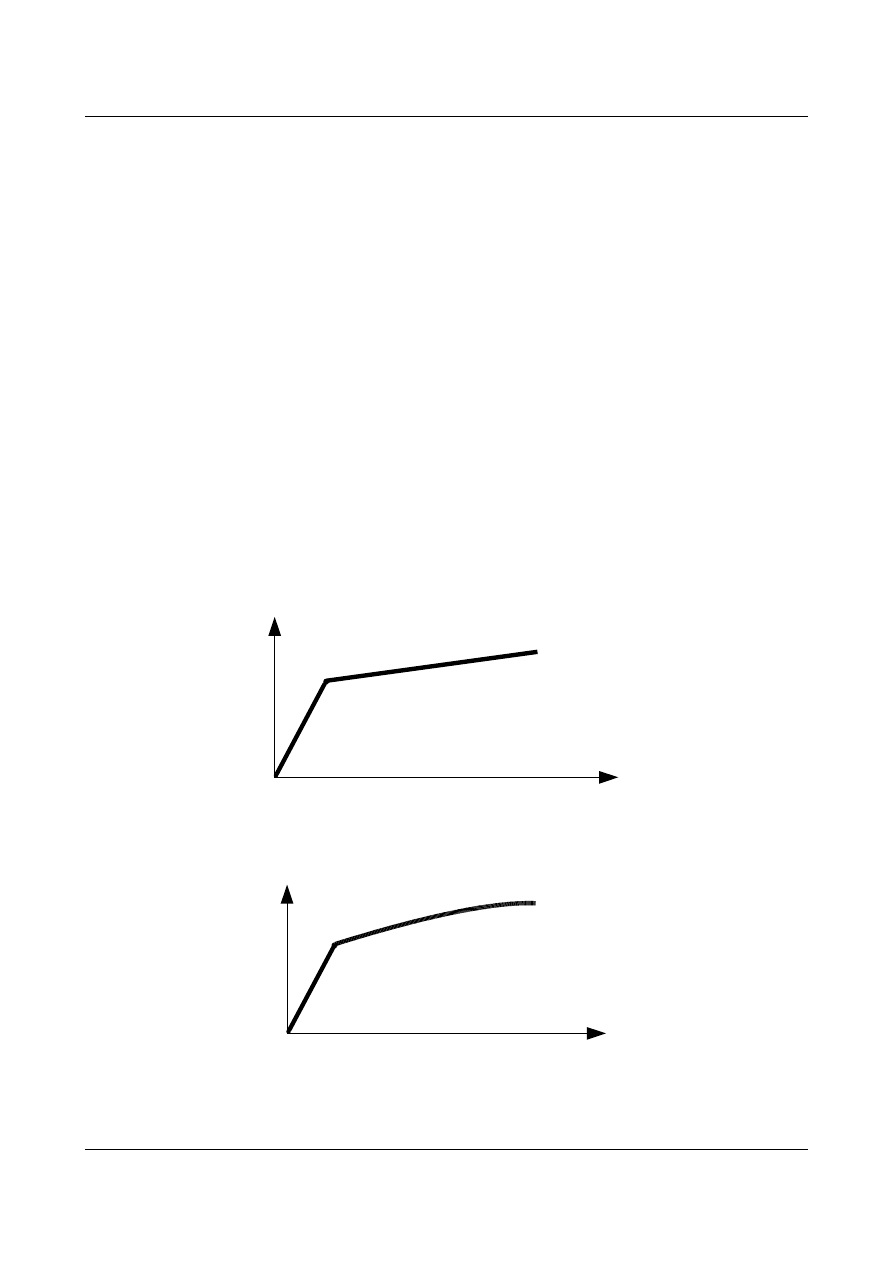
a) model ciała sprężysto - plastycznego ze wzmocnieniem liniowym (Rys. 13.1.)
i nieliniowym (Rys. 13.2.)
Rys. 13.1. Model ciała sprężysto - plastycznego ze wzmocnieniem liniowym
Rys. 13.2. Model ciała sprężysto - plastycznego ze wzmocnieniem liniowym
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
E
E
13. WSTĘP DO TEORII PLASTYCZNOŚCI
2
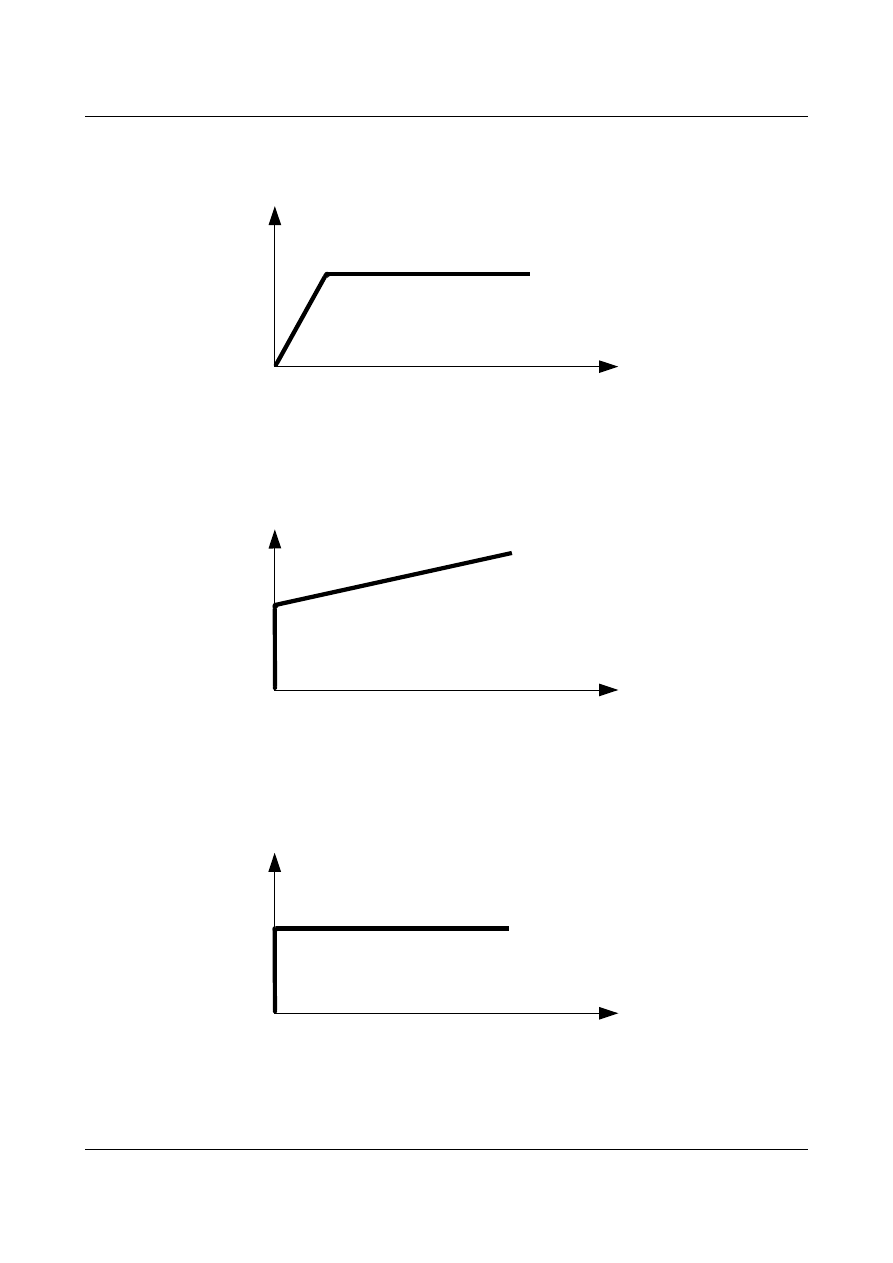
b) model ciała sprężysto – idealnie – plastycznego (Rys. 13.3.)
Rys. 13.3. Model ciała sprężysto – idealnie – plastycznego
c) model ciała sztywno - plastycznego ze wzmocnieniem (Rys. 13.4.)
Rys. 13.4. Model ciała sztywno - plastycznego ze wzmocnieniem
d) model ciała sztywno – idealnie – plastycznego (Rys. 13.5.)
Rys. 13.5. Model ciała sztywno – idealnie – plastycznego
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
E
E
E
13. WSTĘP DO TEORII PLASTYCZNOŚCI
3
13.3. HIPOTEZY WYTRZYMAŁOŚCIOWE
13.3.1. HIPOTEZA HMH (HUBERA – MISESA – HENCKY'EGO)
Huber
–
zaobserwował, że nie jest możliwe przejście w stan plastyczny ciał z odkształceniami
objętościowymi.
–
musi nastąpić zmiana postaciowa a nie objętościowa, co świadczy o tym, że decyduje
energia typu postaciowego
“Materiał przechodzi w stan plastyczny wtedy gdy energia odkształcenia postaciowego osiąga
wartość krytyczną właściwą danemu materiałowi lecz niezależną od rodzaju stanu naprężeń”
=
1
6 ⋅G
⋅
0
(13.1)
s
o -
intensywność dewiatora naprężeń
G – moduł Kirchoff'a
s
i
=
3
2
⋅
s
jk
⋅s
jk
s
i
=
0
(13.2)
s
jk
– elementy dewiatora naprężeń
Wzór na naprężenia zredukowane w punkcie:
0
=
1
2
⋅
11
−
22
2
22
−
33
2
33
−
11
2
6
12
2
23
2
31
2
(13.3)
Naprężenia w punkcie w głównym stanie naprężeń:
0
=
1
2
⋅
I
−
II
2
II
−
III
2
III
−
I
2
(13.4)
Naprężenia w punkcie w jednoosiowym stanie naprężeń:
0
=
1
2
⋅
2
I
2
=
I
(13.5)
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
13. WSTĘP DO TEORII PLASTYCZNOŚCI
4
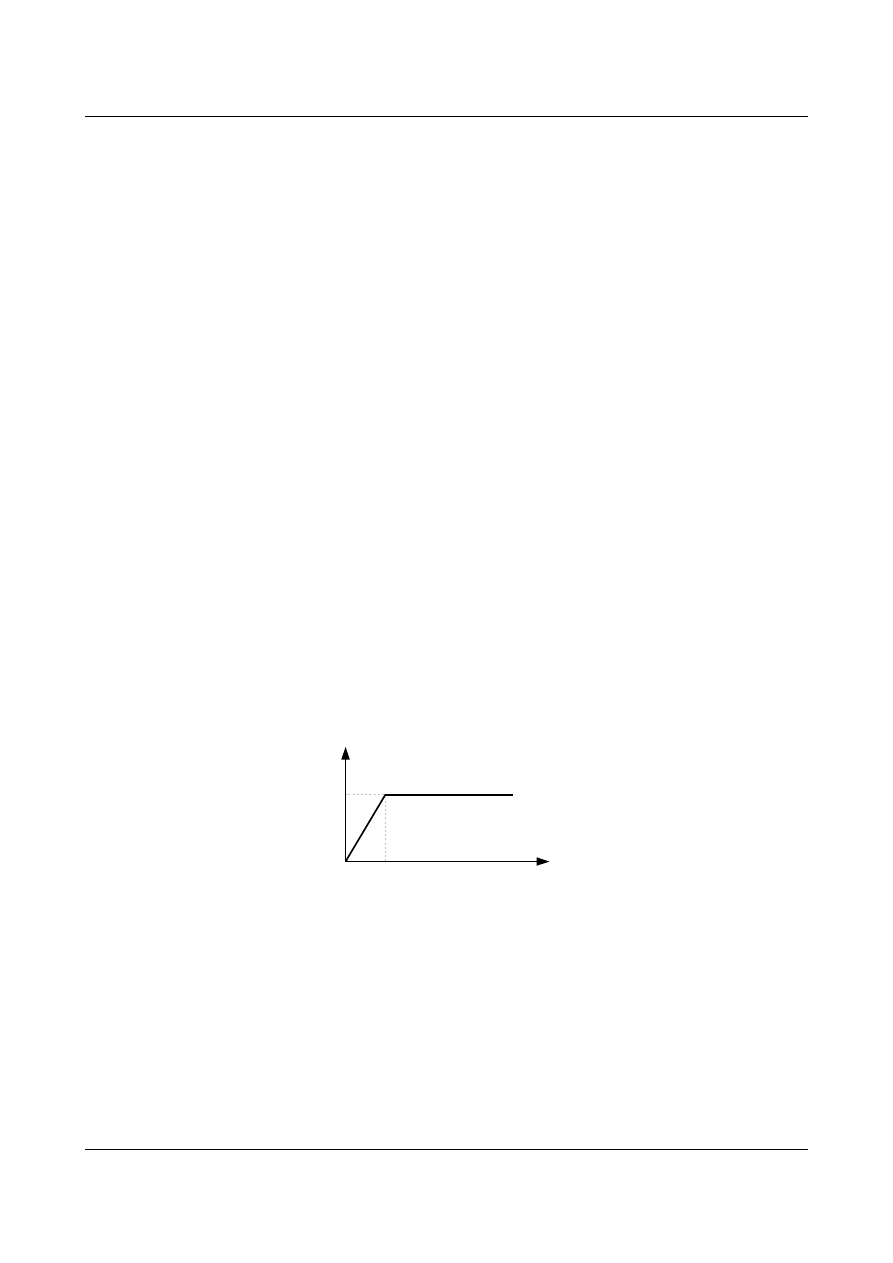
Wartość tensora, dla którego energia sprężysta osiągnie taką wartość, dla której ciało przejdzie w
stan plastyczny można przedstawić wykorzystując stan naprężenia.
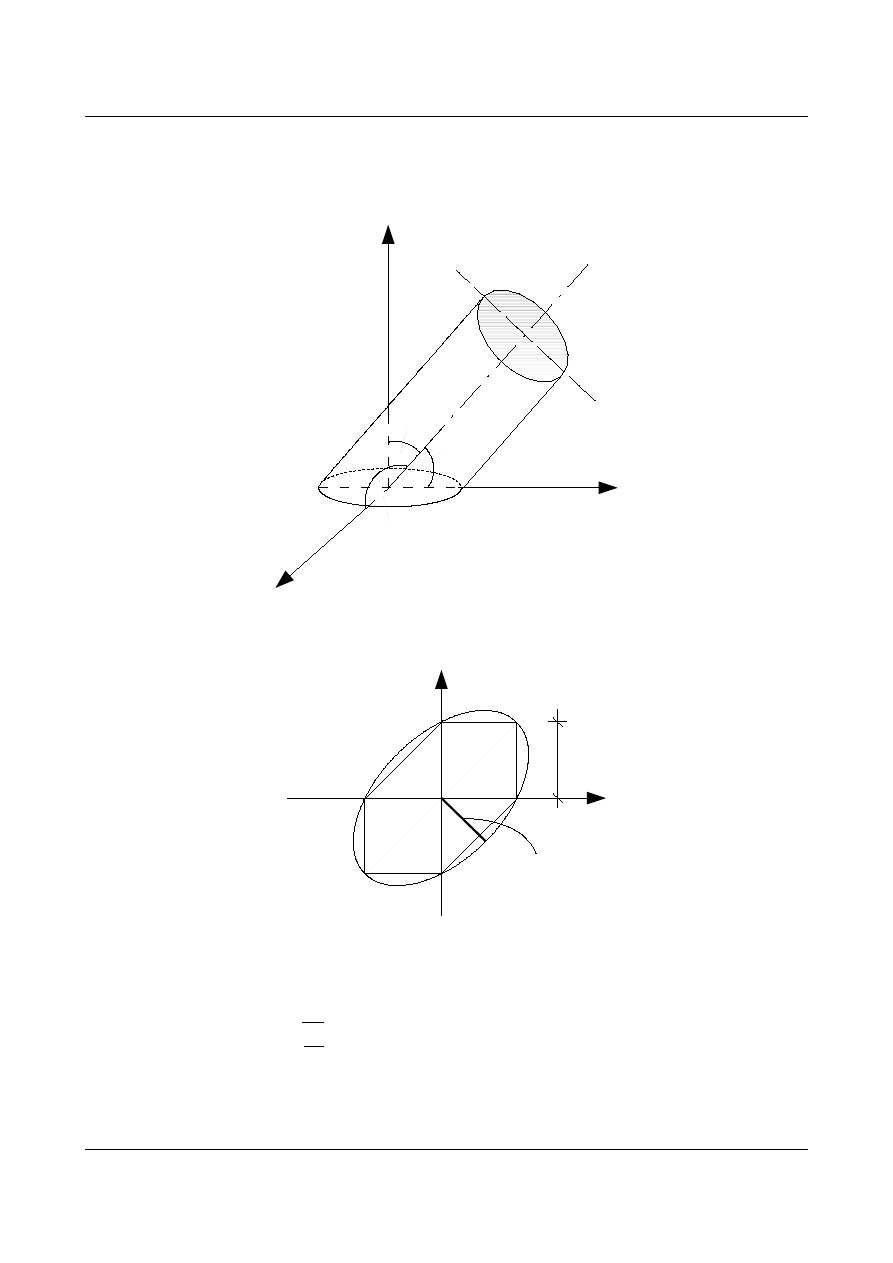
Rys. 13.6. Walec
Rys. 13.7. Płaski stan naprężeń
Naprężenie w głównym stanie naprężeń, gdzie występują tylko trzy zmienne można przedstawić w
trójosiowej przestrzeni naprężeń głównych. Obrazem geometrycznym tego równania jest walec kołowy
(Rys. 13.6.) o promieniu
r
=
2
3
⋅
0
. Oś walca tworzy ten sam kąt z każdą osią układu współrzędnych
I
,
II
,
III
. Jest to tzw. oś aksjatorów.
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
I
III
II
max
s
2
s
1
13. WSTĘP DO TEORII PLASTYCZNOŚCI
5
3 cos
2
=1
arccos
3
3
=54,74
A
(13.6)
Walec jest geometrycznym obrazem naprężeń:
–
współrzędne punktów wypełniających wnętrze walca odpowiadają sprężystym stanom
naprężenia.
–
Uplastycznienie zachodzi dla każdego stanu naprężenia odpowiadającego punktom
leżącym na pobocznice walca.
13.3.2. HIPOTEZA TRESKI
Podstawą do sformułowania tego warunku była obserwacja linii Lüdersa, które powstają w
początkowej fazie uplastyczniania próbki rozciąganej. Ponieważ kąt nachylenia tych linii do osi próbki jest
bliski 45
°
i odpowiada płaszczyznom maksymalnych naprężeń stycznych co oznacza, że:
–
tam musi nastąpić zerwanie więzi w wyniku działania sił stycznych
–
tam będzie poślizg kryształów
„Materiał przechodzi w danym punkcie w stan plastyczny wówczas, gdy maksymalne naprężenie
styczne osiągnie pewną graniczną wartość, charakterystyczną dla tego materiału”
ekst
=
{
1
=
∣
2
−
3
∣
2
2
=
∣
1
−
3
∣
2
3
=
∣
1
−
2
∣
2
(13.7)
Podobnie jak w przypadku teorii HMH także i tutaj można skorzystać z jednoosiowego stanu
naprężenia:
2
=
3
=0
1
≠0
ekst
=
0
2
(13.8)
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
13. WSTĘP DO TEORII PLASTYCZNOŚCI
6
W przypadku teorii Treski geometrycznym obrazem będzie graniastosłup foremny 0 podstawie
sześciokąta, który jest wpisany w walec Hubera. Opisują go zależności:
∣
2
−
3
∣∧
0
∣
1
−
3
∣∧
0
∣
1
−
2
∣∧
0
(13.9)
Graniastosłup jest geometrycznym obrazem naprężeń:
–
współrzędne punktów wypełniających wnętrze graniastosłupa odpowiadają sprężystym
stanom naprężenia
–
uplastycznienie zachodzi dla każdego stanu naprężenia odpowiadającego punktom
leżącym na pobocznicy graniastosłupa
13.4. SPRĘŻYSTO PLASTYCZNE ZGINANIE BELKI
Założenia:
–
belka jest swobodnie podparta
–
rozpatrujemy przypadek czystego zginania
–
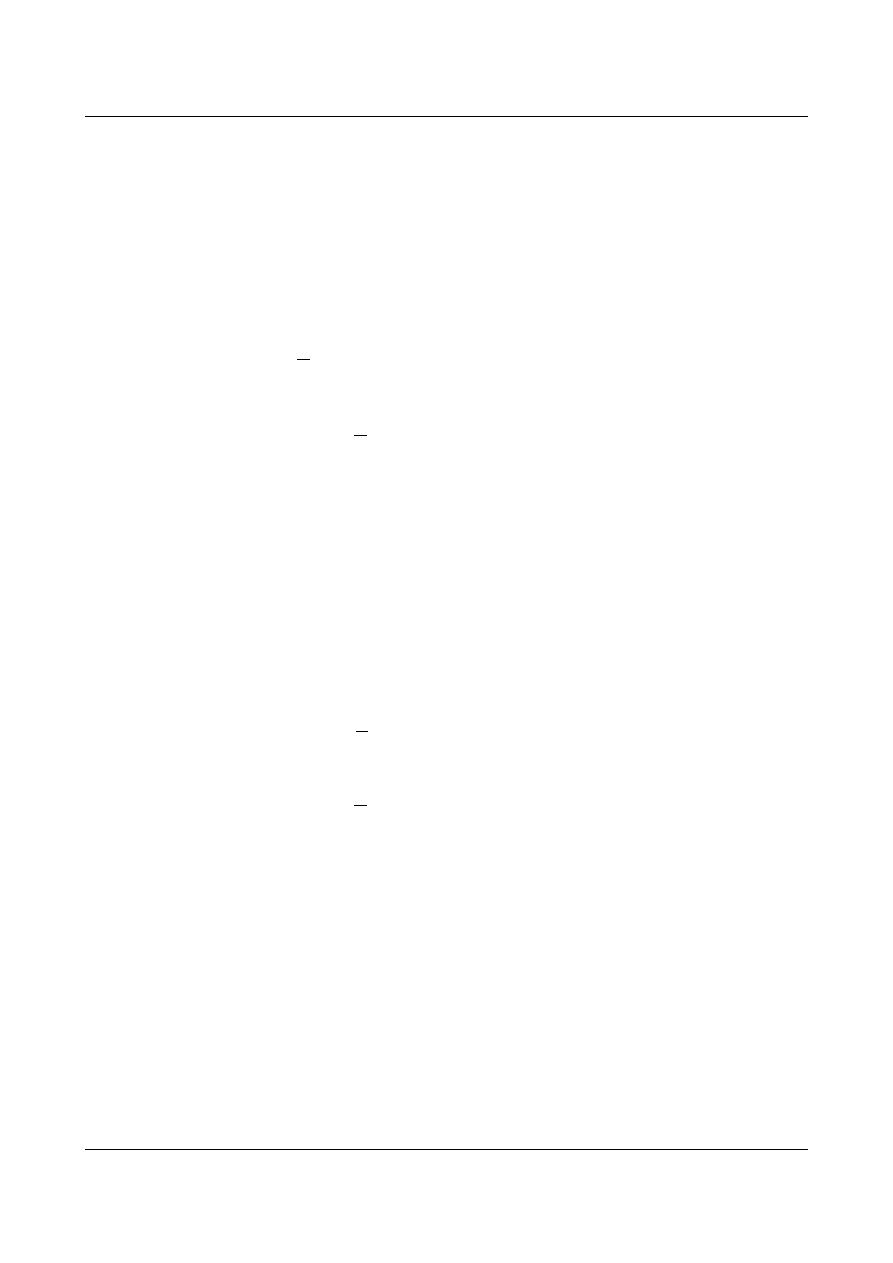
model ciała: sprężysto – idealnie – plastyczny (Rys. 13.8.)
–
Przekrój belki: dowolny przekrój pryzmatyczny (Rys. 13.9.)
Rys. 13.8. Model ciała sprężysto idealnie plastyczny
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
0
0
13. WSTĘP DO TEORII PLASTYCZNOŚCI
7
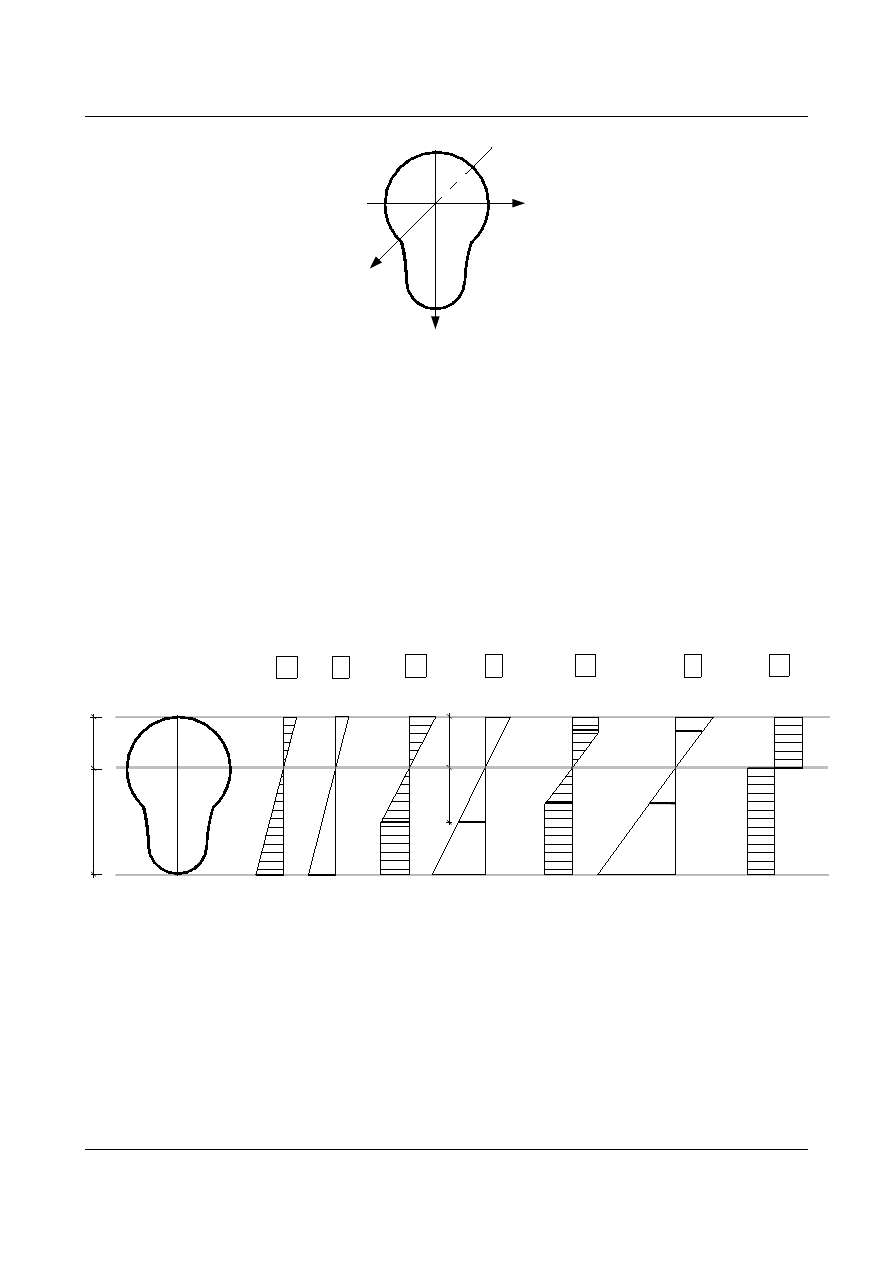
Rys. 13.9. Przekrój pryzmatyczny
Warunki równowagi
1) Siła normalna
N
=
∫
A
x
dA
=0
(13.10)
2) Moment zginający
M
=constans
M
=
∫
A
x
⋅y dA
(13.11)
Rys. 13.10. Rozkład naprężeń i odkształceń
Stan A (patrz Rys. 13.10.)
Naprężenia w dowolnym punkcie:
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
h
g
h
d
A
g
A
d
0
0
0
0
0
0
0
h
g
h
g
0
0
0
0
0
Stan A
Stan B
Stan C
Stan D
x
z
y

13. WSTĘP DO TEORII PLASTYCZNOŚCI
8
x
=
M
I
x
⋅y
(13.12)
Naprężenia w skrajnym włóknie dolnym:
o
=
M
I
x
⋅h
d
(13.13)
Odkształcenia
=⋅
0
E
(13.14)
Stan B (patrz Rys. 13.10.)
Naprężenia w strefie sprężystej:
x
=E⋅=E⋅
1
⋅y
(13.15)
Z 1) warunku równowagi:
∫
−h
g
h
g
x
dA
∫
h
g
h
d
0
dA
=0
(13.16)
Po podstawieniu
s
x
, dA i wyciągnięciu przed całkę wielkości stałych otrzymamy:
E
⋅
1
∫
−h
g
h
g
y
⋅b ydy
0
⋅
∫
h
g
h
d
b
ydy=0
(13.17)
E
S
s
0
⋅A
p
=0
(13.18)
Gdzie:
S
s
– moment statyczny części przekroju w zakresie naprężeń sprężystych
A
p
– pole części przekroju w zakresie naprężeń plastycznych
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
13. WSTĘP DO TEORII PLASTYCZNOŚCI
9
Z 2) warunku równowagi:
∫
−h
g
h
g
x
⋅y dA
∫
h
g
h
d
0
⋅ydA=M
(13.19)
Po podstawieniu
s
x
, dA i wyciągnięciu przed całkę wielkości stałych otrzymamy:
E
⋅
1
∫
−h
g
h
g
y
2
⋅b ydy
0
⋅
∫
h
g
h
d
y
⋅b ydy=M
(13.20)
E
I
s
0
⋅S
p
=M
(13.21)
Gdzie:
I
s
– moment bezwładności części przekroju w zakresie naprężeń sprężystych
S
p
– moment statyczny części przekroju w zakresie naprężeń plastycznych
Stan C (patrz Rys. 13.10.)
Stan ten jest podobny do stanu B, zwiększa się tylko zakres strefy plastycznej.
Analizując warunki równowagi otrzymamy takie same zależności:
E
S
s
0
⋅A
p
=0
(13.22)
E
I
s
0
⋅S
p
=M
(#.23)
Stan D (patrz Rys. 13.10.)
Z 1) warunku równowagi:
∫
h
g
h
d
0
dA
=0
(13.24)
Po podstawieniu dA i wyciągnięciu przed całkę wielkości stałych otrzymamy:
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater

13. WSTĘP DO TEORII PLASTYCZNOŚCI
10
0
⋅
∫
h
g
h
d
b
ydy=0
(13.25)
0
⋅A
p
=0
(13.26)
Z 2) warunku równowagi:
∫
h
g
h
d
0
⋅ydA=M
(13.27)
Po podstawieniu dA i wyciągnięciu przed całkę wielkości stałych otrzymamy:
0
⋅
∫
h
g
h
d
y
⋅b ydy=M
(13.28)
0
⋅S
p
=M
(13.29)
Środek ciężkości dzieli przekrój na dwie części o takiej samej wartości momentu statycznego. Pola
powierzchni tych dwóch części nie muszą być takie same (A
g
≠ A
d
)
, zatem warunek 1)
0
⋅A
p
=0
nie
będzie spełniony.
Nastąpi przesunięcie osi ciężkości przekroju.
S
p
z drugiego warunku musi być policzone względem nowego położenia osi.
Wiemy, że
0
=
M
S
p
(13.30)
Oraz, że
max
=
M
W
(13.31)
Dla przekroju idealnie plastycznego (Rys. 13.10. - stan D)
0
=W
pl
(13.32)
Gdzie: W
pl
– wskaźnik oporu plastycznego
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
13. WSTĘP DO TEORII PLASTYCZNOŚCI
11
Dla przekroju prostokątnego:
Rys. 13.11. Przekrój prostokątny
W
pl
=2 ⋅[b⋅h⋅0,5⋅
h
4
]=
b
⋅h
2
4
Dla prętów o innych przekrojach geometrycznych W
pl
wynosi:
–
dla przekroju kołowego:
W
pl
=
4 r
3
3
(13.33)
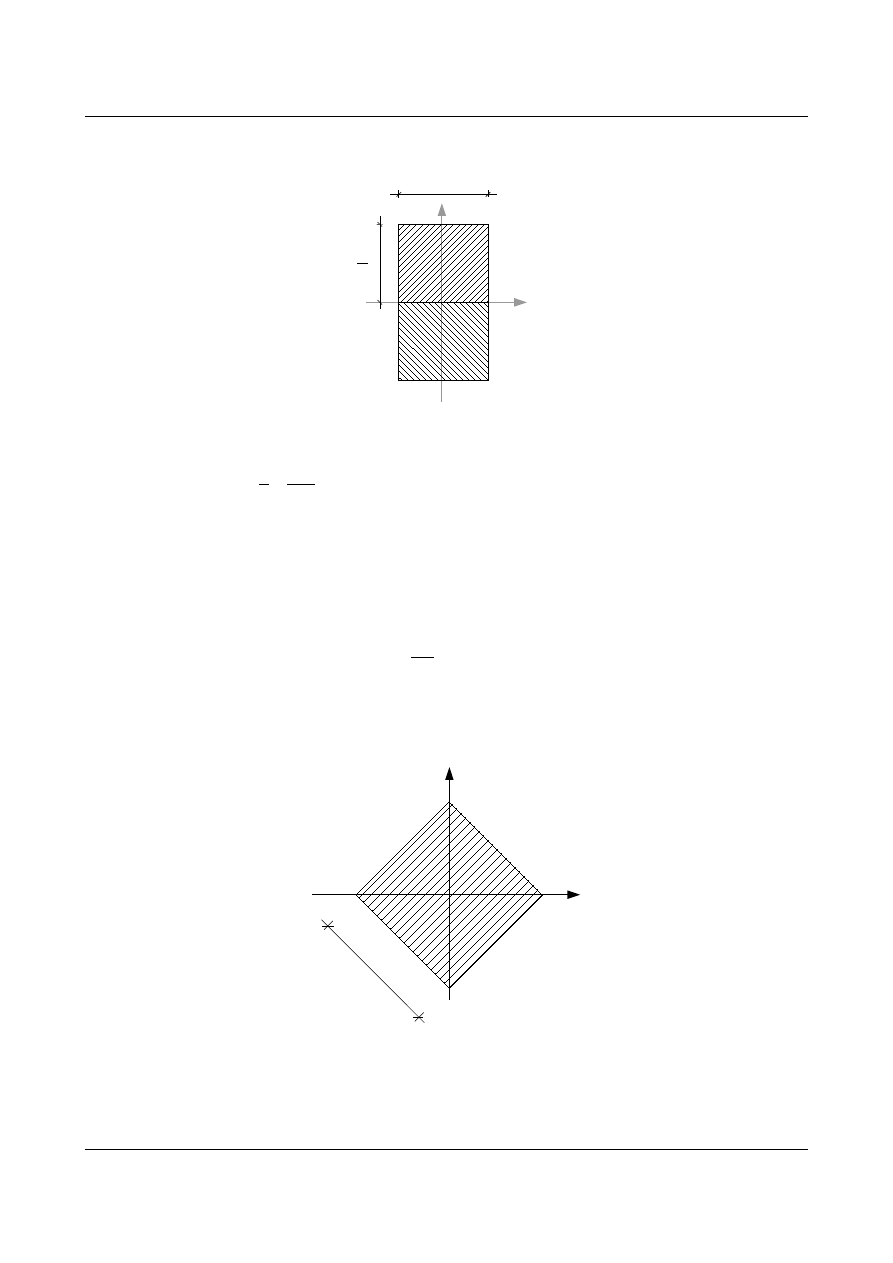
–
dla przekroju w kształcie rombu:
Rys. 13.12. Przekrój w kształcie rombu
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
a
b
h
2
13. WSTĘP DO TEORII PLASTYCZNOŚCI
12
W
pl
=
a
3
3
2
(13.34)
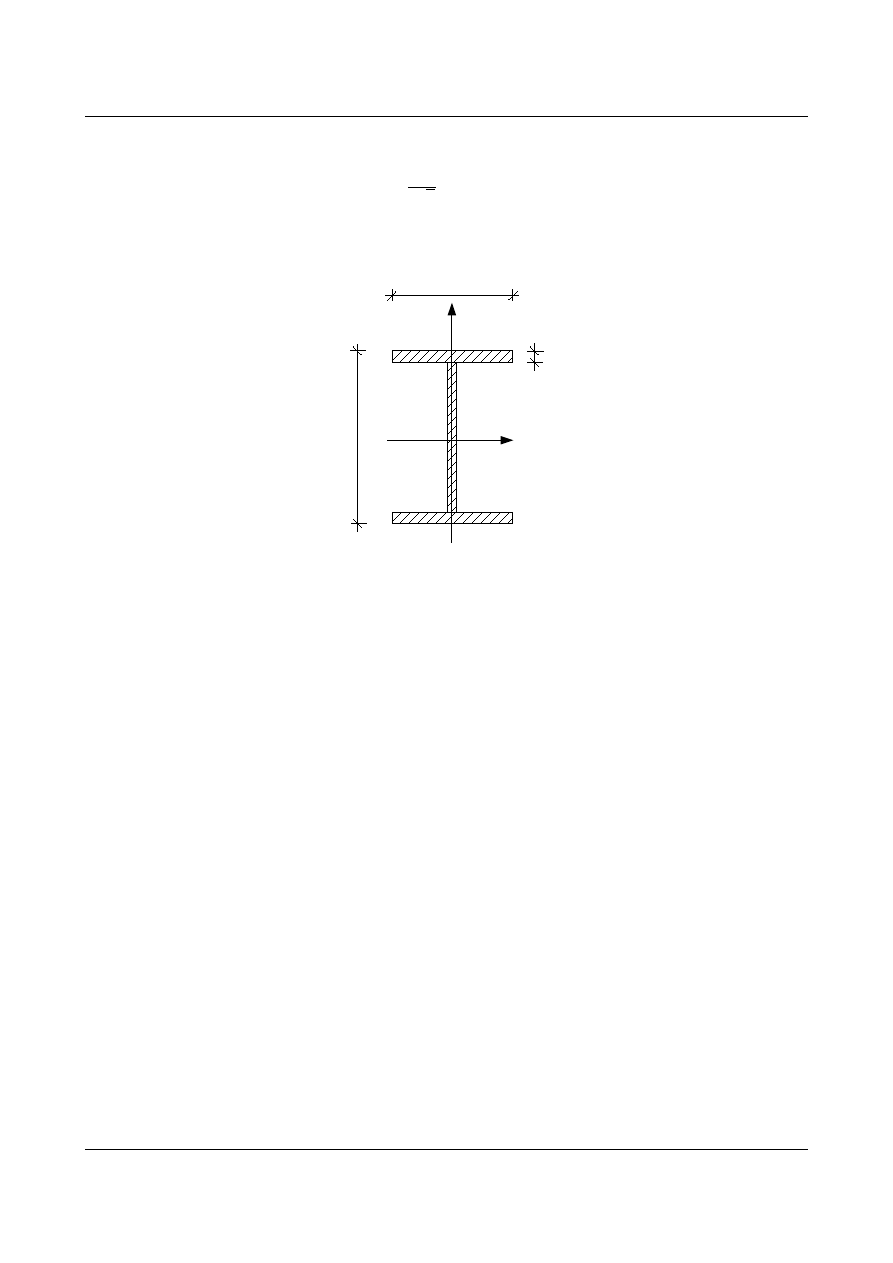
–
dla przekroju teowego:
Rys. 13.13. Przekrój teowy
Pomijamy środnik, co daje nam w rezultacie
W
pl
=t⋅b⋅h
(13.35)
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
b
t
h
Wyszukiwarka
Podobne podstrony:
Wstęp do teorii tłumaczeń 31.05.2010, moczulski
Wstęp do teorii kultury, wykład
Opracowanie 1, nauka - szkola, hasło integracja, rok I, WSTĘP DO TEORII POLITYKI
WSTĘP DO TEORII PAŃSTWA I PRAWA
Wstep do teorii polityki - Chazbijewicz(2)(1), europeistyka
Wstęp do teorii komunikacji cz.1, Wstęp do teorii komunikacji
28.10.11, Wstęp do teorii komunikacji
28.10.11, Wstęp do teorii komunikacji
2009 10 13 Wstep do SI [w 01]id Nieznany
2009-10-13 Wstęp do SI [w 01], Sztuczna inteligencja
4.11.11, Wstęp do teorii komunikacji
02[2]Wstep do teorii sprezystosci
Wstęp do teorii polityki wykłady
Wstęp do teorii tłumaczeń 22.03.2010, moczulski
Wstęp do teorii tłumaczeń 12.04.2010, moczulski
Wstęp do teorii tłumaczeń 19.01.2010, moczulski
więcej podobnych podstron