
Planowanie sieci transportowych
4. Modelowanie w planowaniu
transportu
dr inż. Lech Michalski
Politechnika Gdańska, Wydział Inżynierii Lądowej i Środowiska, Katedra Inżynierii Drogowej
1

Plan wykładu
•
Rola modeli
•
Pożadane cechy modeli i ich klasy
•
Rodzaje modeli w modelowaniu podróży
•
Modele obszaru (przestrzeni)
•
Modele sieci
•
Modele ruchu

1. Rola modeli w procesie planowania
•
Matematyczne modelowanie ruchu (podróży)
służy
•
Opisaniu zachowań transportowych obecnych
i przyszłych
•
Oszacowaniu potrzeb przewozowych
•
Określenie niezbędnych działań
organizacyjnych i inwestycyjnych
•
Ocena skutków proponowanych rozwiązań

2. Pożądane cechy modeli
•
Dopasowanie i precyzja
•
Oszczedność danych i żródeł obliczeniowych
•
Zdolność
do
reprezentowania
procesów
i
oddziaływań
•
Własciwe rozmieszczenie geograficzne
Remenber: „All models are wrong, however, some are useful” (Wszystkie
modele są złe, kilka jest użytecznych)
Joseph Sussman

Klasy modeli możliwych w analizach
transportowych
•
Prosta formuła y=f(x) (np. wypadki jako funkcja pracy
przewozowej)
•
modele szeregów czasowych (np. zmiany wskaźnika
motoryzacji)
•
Uśrednianie i wygładzanie (np średnie prognozy)
•
Analiza regresji (np. w dokładniejszym prognozowaniu)
•
Modele estymacji macierzowej (np. macierz żródło – cel)
•
Modele elastyczności (np. reprezentujące wpływ na
transport publiczny cen paliw lub częstotliwości jazdy)
•
Modelowanie wyboru pomiędzy alternatywami
•
Modele symulacyjne

Klasyfikacja modeli ruchu (1)
•
Statyczne
•
Modele średnich sytuacji
•
Dynamiczne
•
Modele sytuacji zmiennych w czasie
•
Dyskretne
•
Niezależne zmienne wyrażone w liczbach całkowitych
•
Stochastyczne lub deterministyczne
•
Modele zakładają zmienność np. czasu reakcji, każda
symulacja może dać inne rezultaty
•
Kroków czasowych lub zdarzeniowe
•
Co 1 s lub co zdarzenie
6

Klasyfikacja modeli ruchu (2)
•
Bazujace na swoich własnościach
•
Interpretacja fizyczna
•
Dyskretne a ciagłe
•
Deterministyczne a stochastyczne
•
Bazujace na dynamicznym potoku
•
Makroskopowe
•
Mezoskopowe
•
Mikroskopowe
•
Nanoskopowe
7

Podejście mikroskopowe
•
Mapy pojedynczych pojazdów
•
Reprezentują
•
Zintegrowaną sieć
•
Szeroki zakres urządzeń sterowania
•
Różne klasy pojazdów
•
Modelują ruch pojedynczych pojazdów
•
Car following
•
Zmiany pasa
•
Sploty i rozploty
•
Autobusy
•
Uwzględniają zachowania
•
Przed podróżą
•
W trakcie podróży
•
Agresywność i podporządkowanie się
8

Podejście makroskopowe
•
Dyskretyzacja w czasie i przestrzeni
•
Rozległe sieci, ograniczone szczegóły
•
Brak identyfikacji pojedynczych pojazdów w
potoku
•
Charakteryzacja poprzez wartości
makroskopowe jak prędkość, gęstość,
natężenie
•
Potok traktowany jako ciągły płynny potok w
dynamice płynów
9

Podejście mezoskopowe
•
Pojedyńcze pojazdy, zagregowane zachowania
na połączeniach w sieci
•
Typy
•
prędkość = f(gęstości)
•
automaty komórkowe (automata theory)
•
Ogólne zasady
•
zdefiniować zasady dla wszystkich uczestników ruchu
•
zdefiniować punkt początkowy
10

3. Rodzaje modeli w procesie
modelowania ruchu
•
Model obszaru
•
Model sieci transportowej
•
Model ruchu

4. Model obszaru
•
Zasady ustalania granic obszaru i podziału na rejony
•
Zapis struktury modelu obsaru
»
Q=(Z, E)
zbiór elementów obszaru
»
Z=(1,2…..i…..m) zbiór rejonów w obszarze
»
E=(m+1, .j….n) zbiór wlotów do obszaru
»
i=1,2,…m
numery rejonów
»
J=m+1,….n
numery wlotów
•
Charakterystyka obszaru – wartości mające wpływ na
wielkość i kierunek generowanego ruchu np. LM,
LMP,

5. Model sieci
•
Elementy mające wpływ na rozkład ruchu
•
Struktura sieci (graf)
»
G { W, L }
»
W={ 1,2….i….m }
»
i=1,2,...m
»
L={l=<i,j>; i, j ЄW }
•
Sieć jest spójna jeśli pomiędzy każdą parą
węzłów istnieje co najmniej jedna droga

Podstawowe strukturalne własności
grafu
•
Symetria i asymetria
•
Dopasowanie lub niedopasowanie
•
Kompleksowość
•
Łączność/spójność
•
Uzupełnianie
•
Korzenie, drzewa, przesmyk
Podstawowy graf przedstawiający
sieć transportową
1
2
3
4
5
wierzchołek (
węzeł
)
krawędź (
połączenie
)
klamra
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra University.
Graf płaski i niepłaski
Płaski
niepłaski
A
B
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra University.
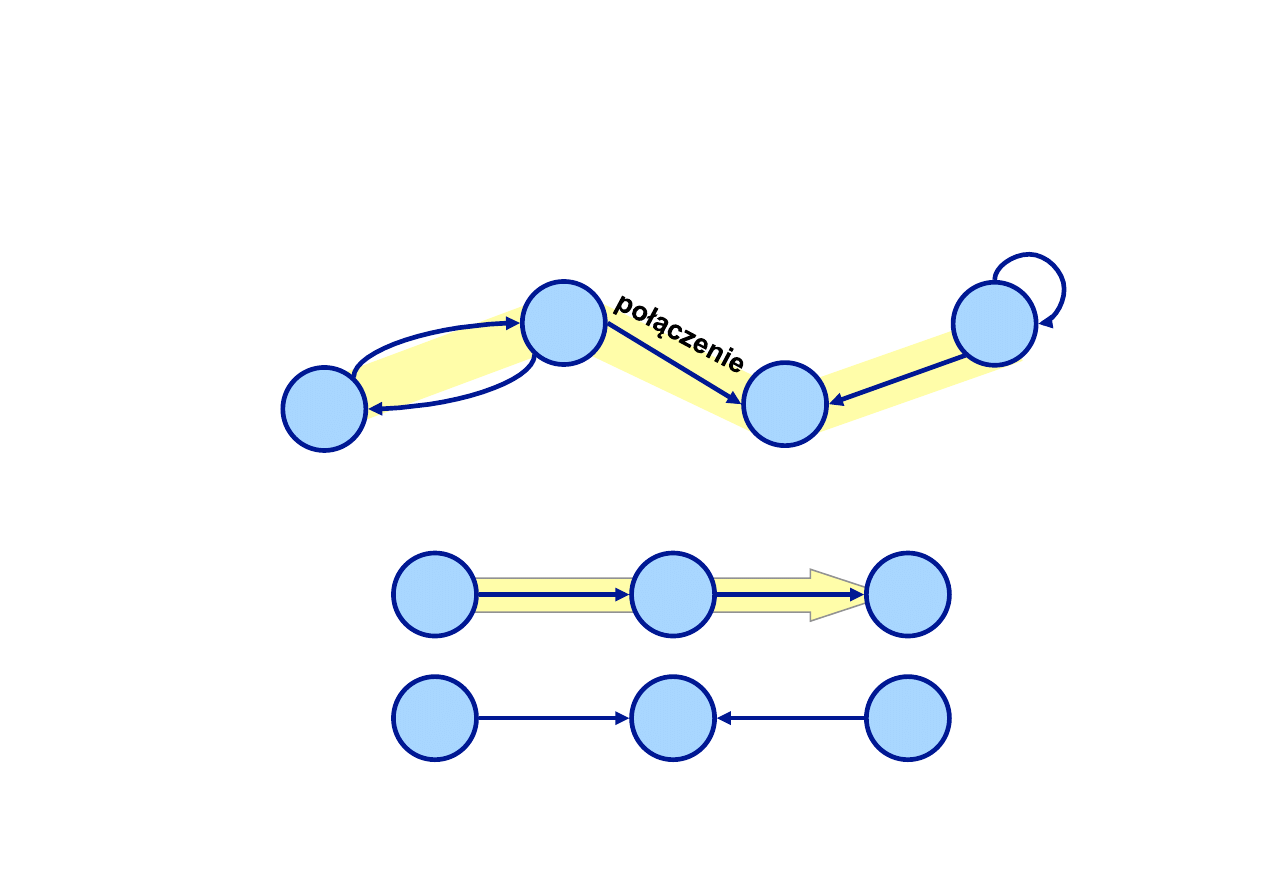
Połączenie i ścieżka
1
2
3
4
łącze
1
2
3
B
1
2
3
C
ścieżka (1 to 3)
A
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra University.
Długość łącza, połączenia lub ścieżki
1
2
3
4
5
6
2 km
5 km
6 km
7 km
4 km
2 km
2 km
3 km
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra University.
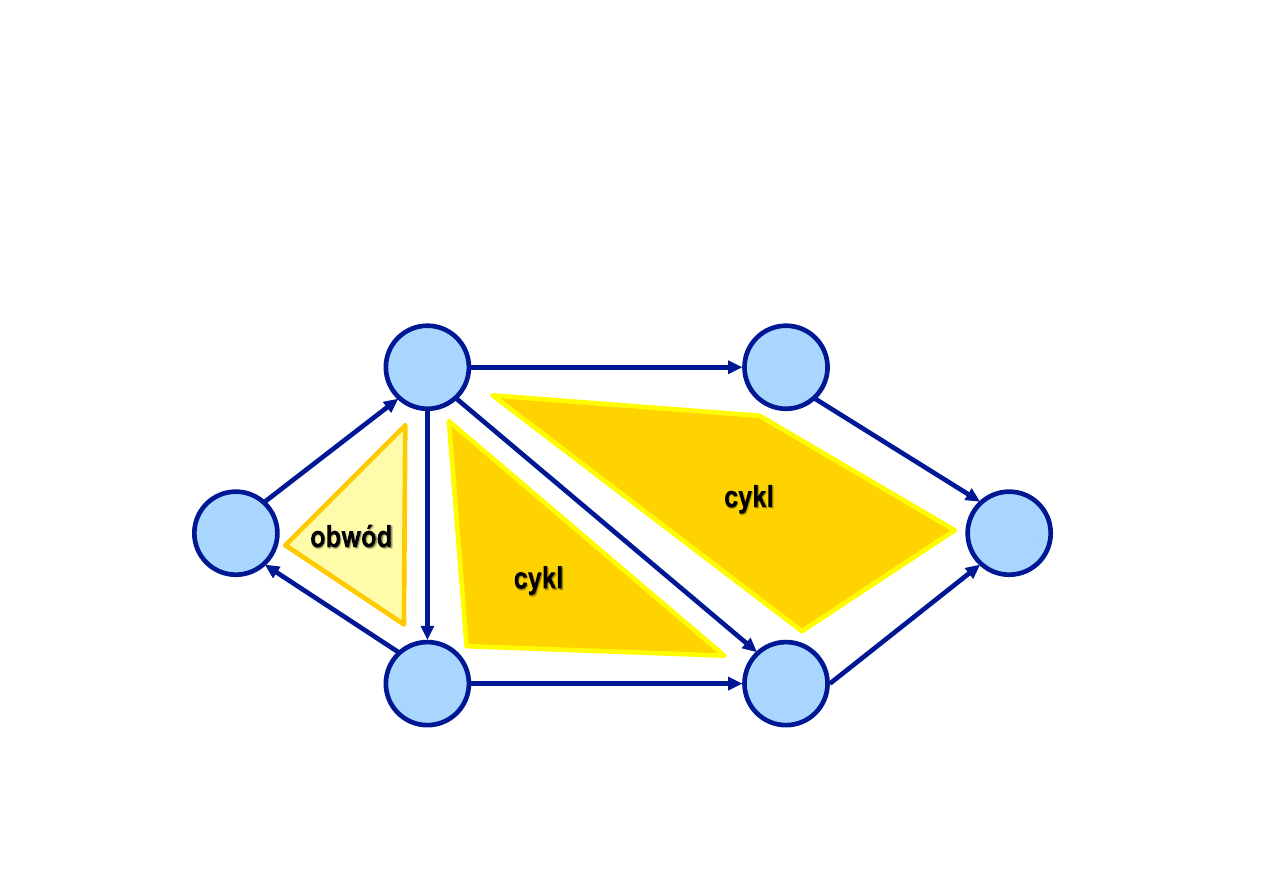
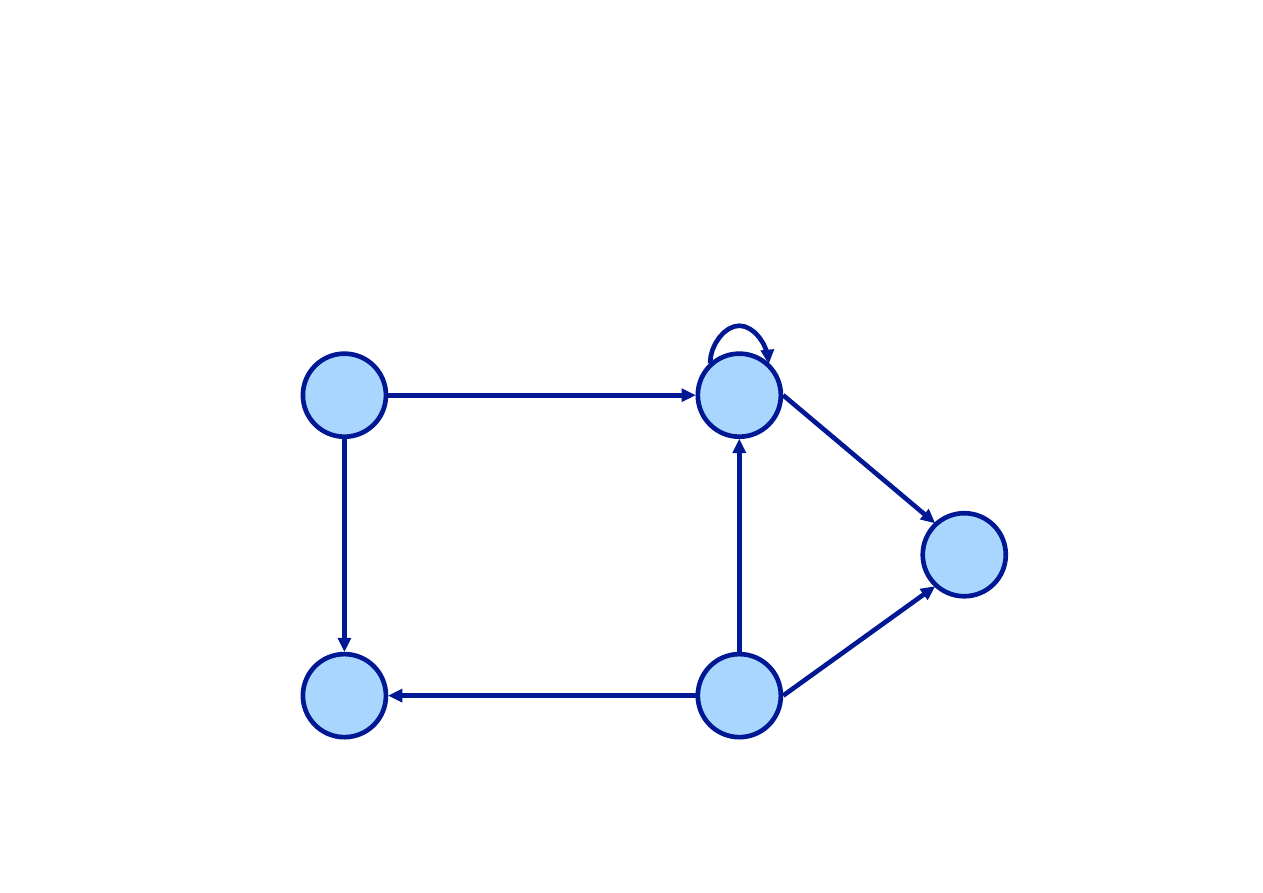
Cykl i obwód
1
2
3
4
5
6
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra University.
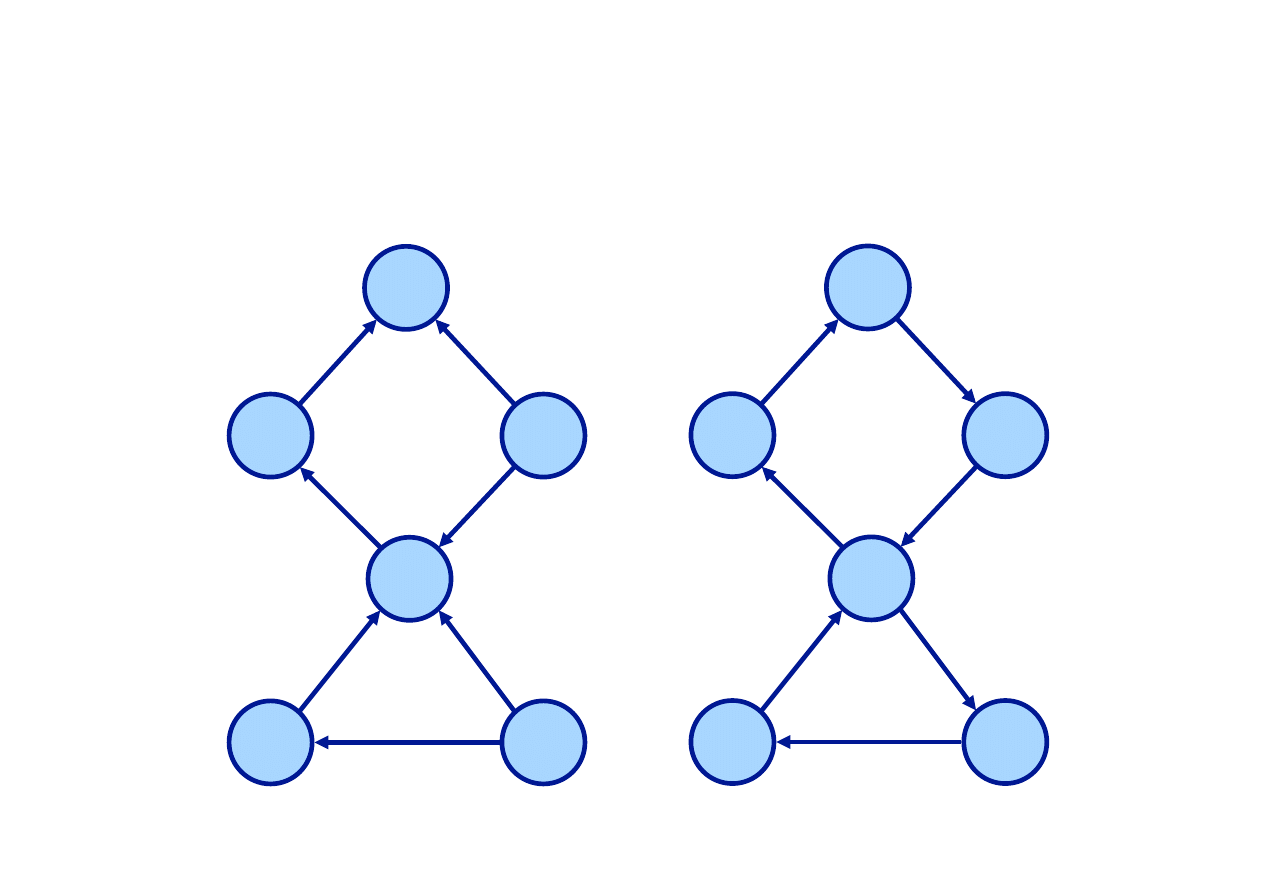
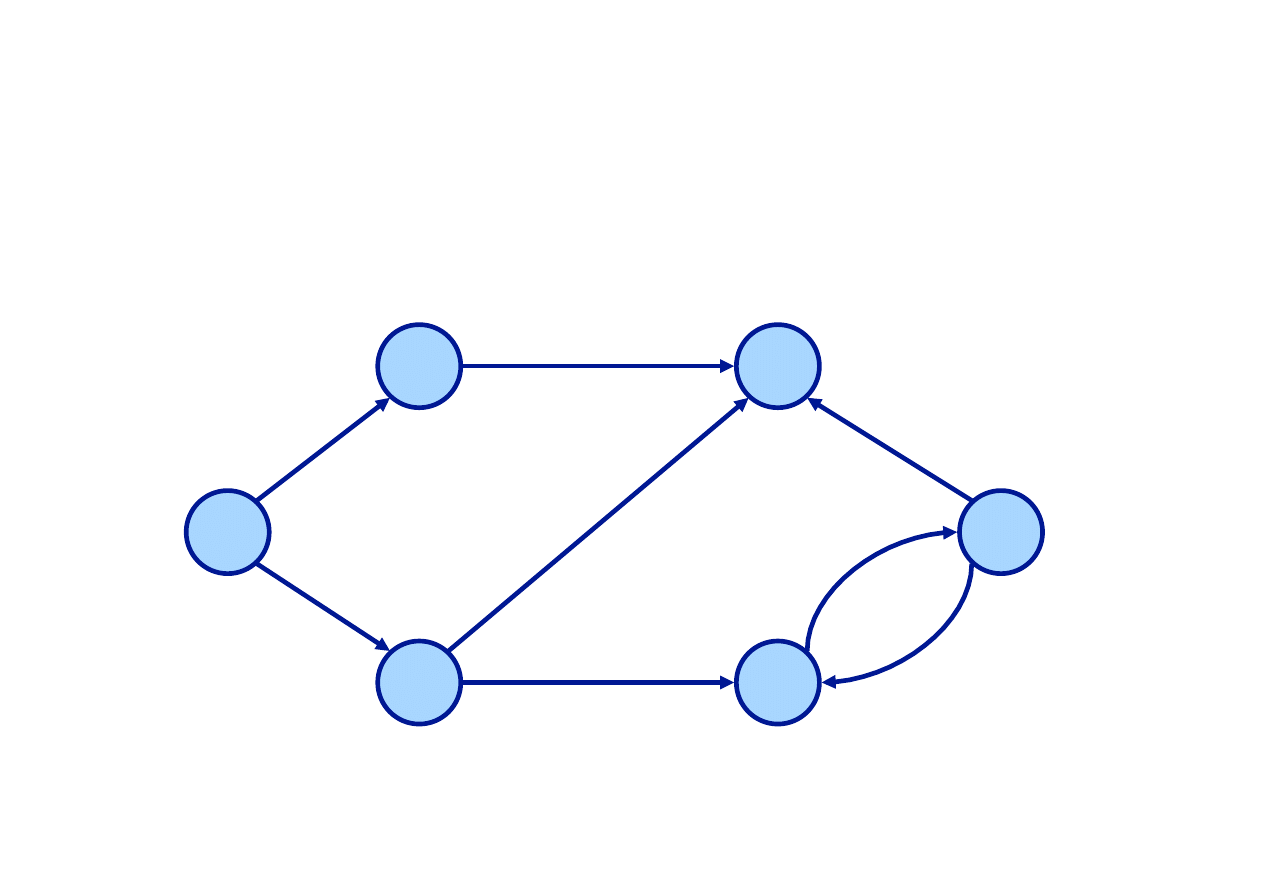
Łączność w grafie
1
2
3
4
5
6
A
1
2
3
4
5
6
B
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra University.
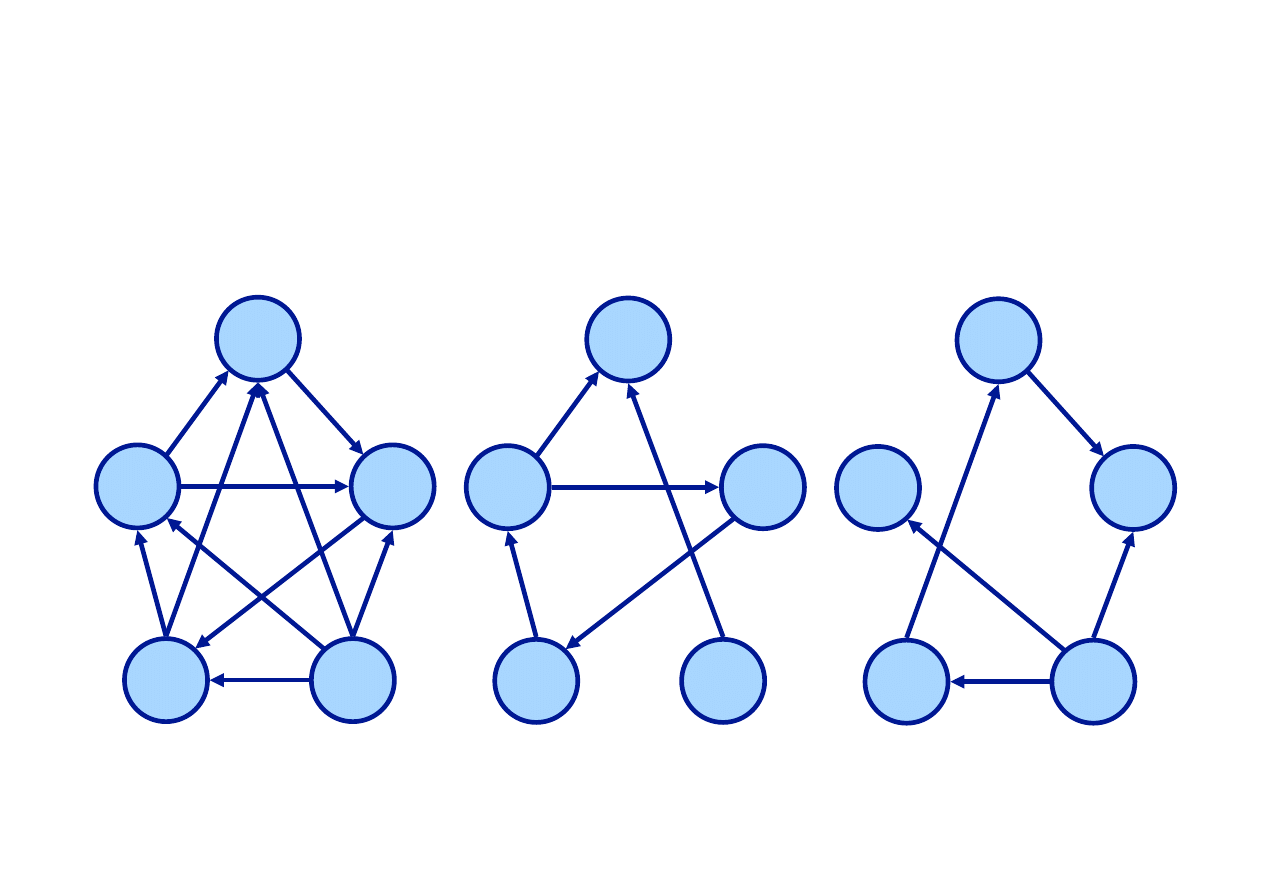
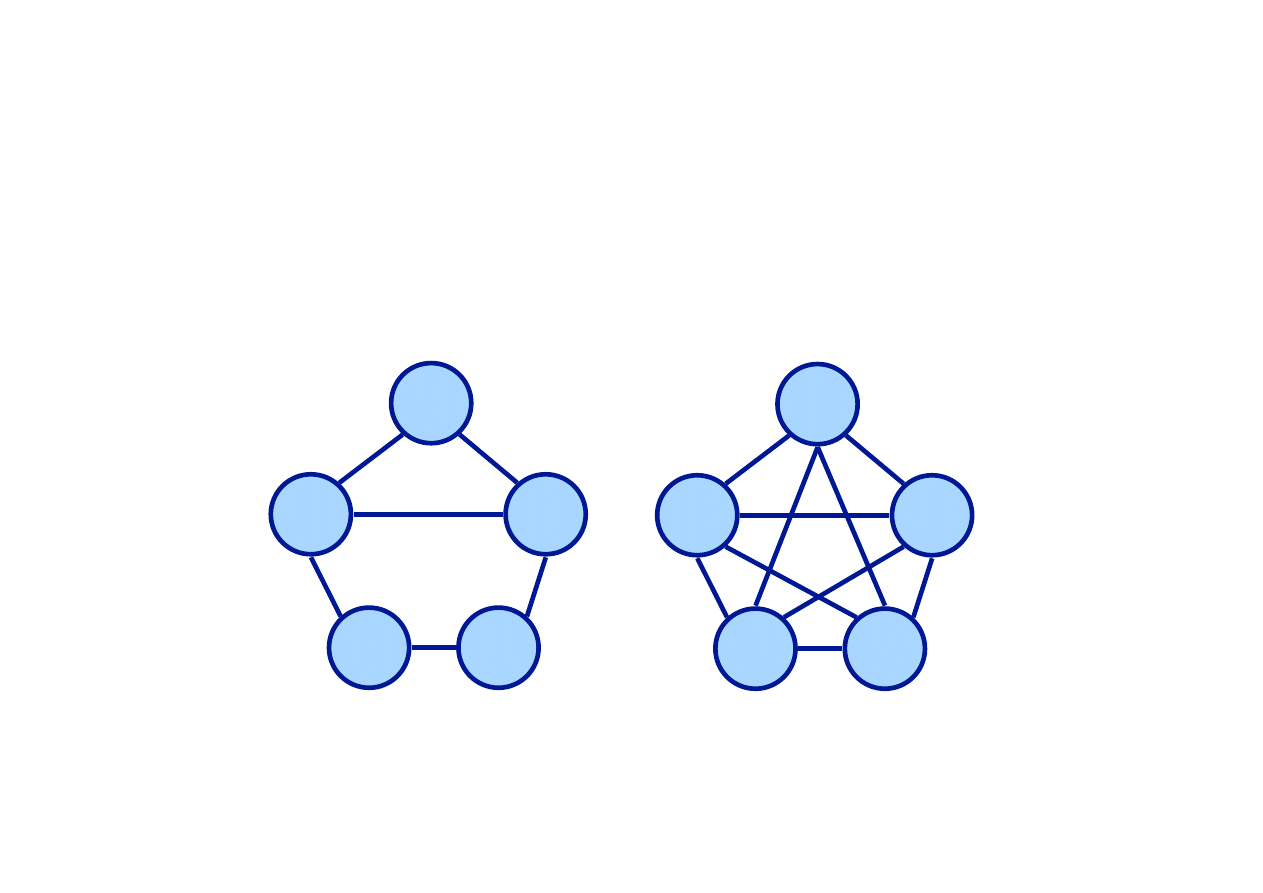
Grafy komplementarne
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
G=X+Y
X
Y
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra University.
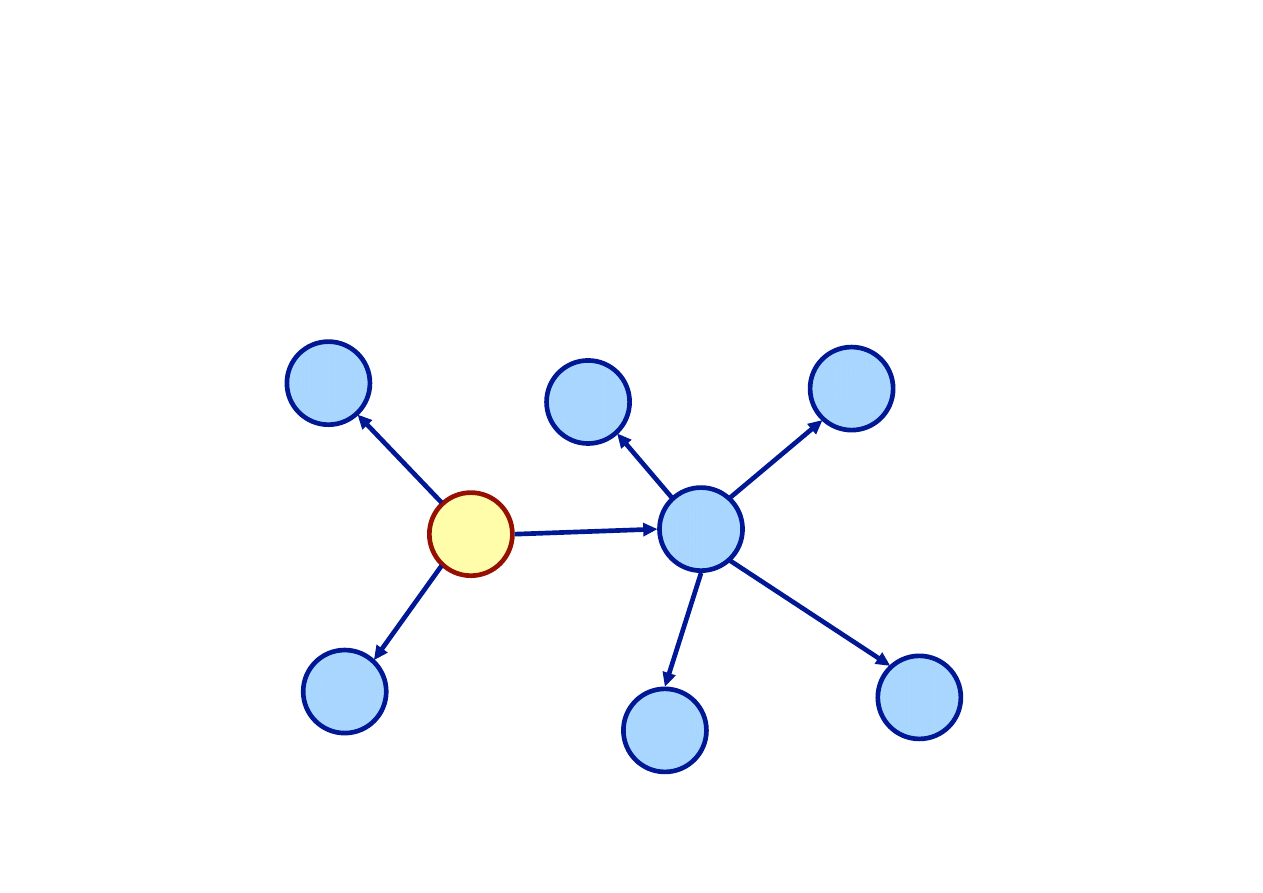
Graf rozgałęźny
1
2
3
4
5
6
8
7
korzeń
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra University.

6. Modelowanie oddziaływań
pomiędzy transportem a
zagospodarowaniem przestrzennym
•
Modelowanie statyczne. Określenie stanu systemu w danej
chwili poprzez klasyfikacje i działania arytmetyczne na
reprezentatywnych zmiennych
•
Modelowanie systemowe. Określenie zachowania systemu
przy danych zależnościach pomiędzy zmiennymi. Przykładowo
model grawitacyjny
•
Modelowanie oddziaływań między systemami. Próba
integracji kilku modeli do formy meta-‐systemu (system
kompleksowy i rozległy)
•
Modelowanie w środowisku podejmowania decyzji. Dotyczy
nie tylko samych zależności „transport a zagospodarowanie”,
ale także zastosowanie wyników przy formułowaniu strategii i
rekomendacji.
Model transport/zagospodarowanie
przestrzenne
jako procedura sekwencyjna
•
Generacja podróży. Określenie stopnia w jakim dana jednostka
przestrzenna jest źródłem i celem ruchu.
•
Rozkład podróży. Model, który określa przemieszczanie pomiędzy
źródłem i celem, mogący uwzględnić przeszkody takie jak
odległość.
•
Podział modalny. Przemieszczenia pomiędzy źródłem i celem są
rozdzielone pomiędzy środki transportu, zależnie od dostępności
środka, kosztów i preferencji.
•
Obciążenie ruchem. Wszystkie podróże z podziałem na źródłowe,
docelowe oraz srodki transportu obciążają sieć transportową.
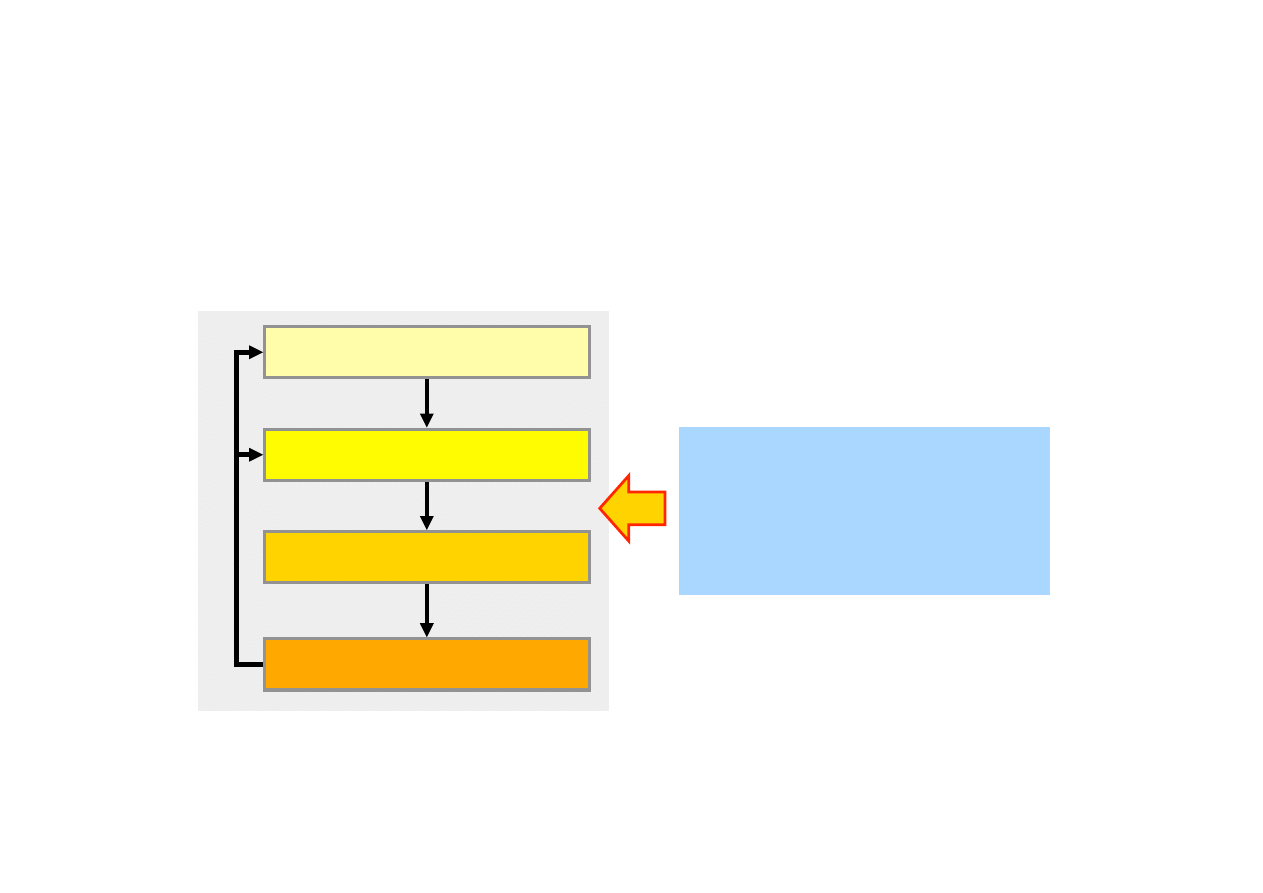
Model 4 poziomowy
Generacja podróży
Rozkład podróży
Podział przwozów
Obciążenie ruchem
• dane o zagospodarowaniu
• czynniki generacji podróży
• czynniki oporu przestrzeni
• czynniki kalibracji
• sieć transportowa
Fe
edba
ck
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra University.

Wymagane dane do modelu
•
Zagospodarowanie przestrzenne
•
Czynniki generacji podróży
•
Czynniki oporu przestrzeni
•
Czynniki kalibracji
•
Sieć transportowa

Modele generacji podróży
•
Zwykle na poziomie rejonu (zony)
•
Najczęściej klasyfikacja krzyżowa (cross-‐
classificaron, category analysis) i analiza regresji
wielokrotnej;
•
Klasyfikacja umożliwia identyfikację specyficznych
grup socjoekonomicznych w populacji mającej
podobne charakterystyki generacji podróży
•
Analiza regresji określa liczbę podróży
wytwarzanych przez rejon jako funkcja wielu
zmiennych niezależnych

Modele przestrzennego rozkładu
podróży
•
Najczęściej używaną techniką jest model
grawitacyjny
•
Jest wiele form modelu grawitacyjnego i wiele
technik kalibracji tego modelu. Klasyfikacja
krzyżowa lub regresja wielokrotna może być
także uzywana do obliczania liczby podróży
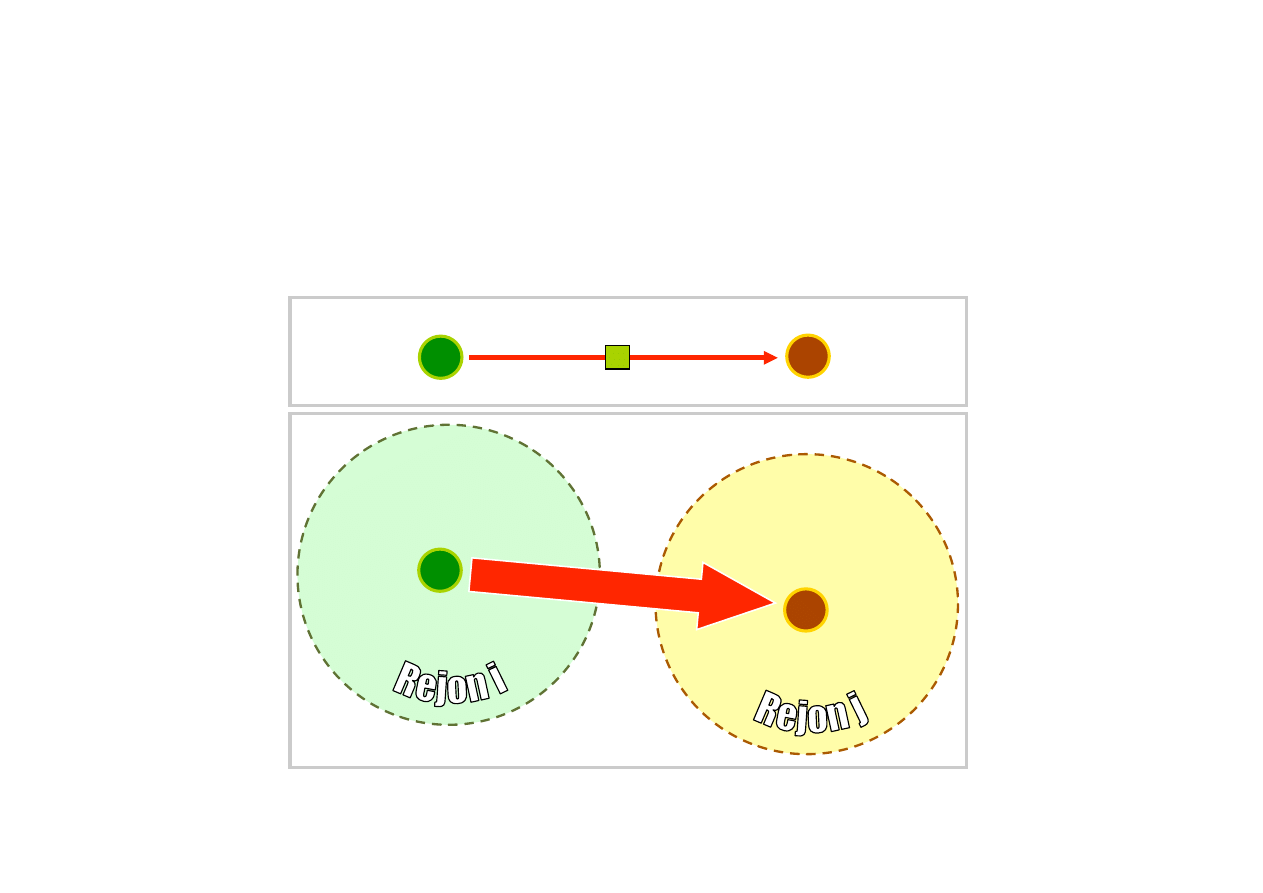
Przedstawienie przemieszczenia jako
interakcja przestrzenna
i
Tij = 50
j
Centroid
Centroid
i
j
Wektor
Przemieszczenie
Interakcja przestrzenna
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra University.
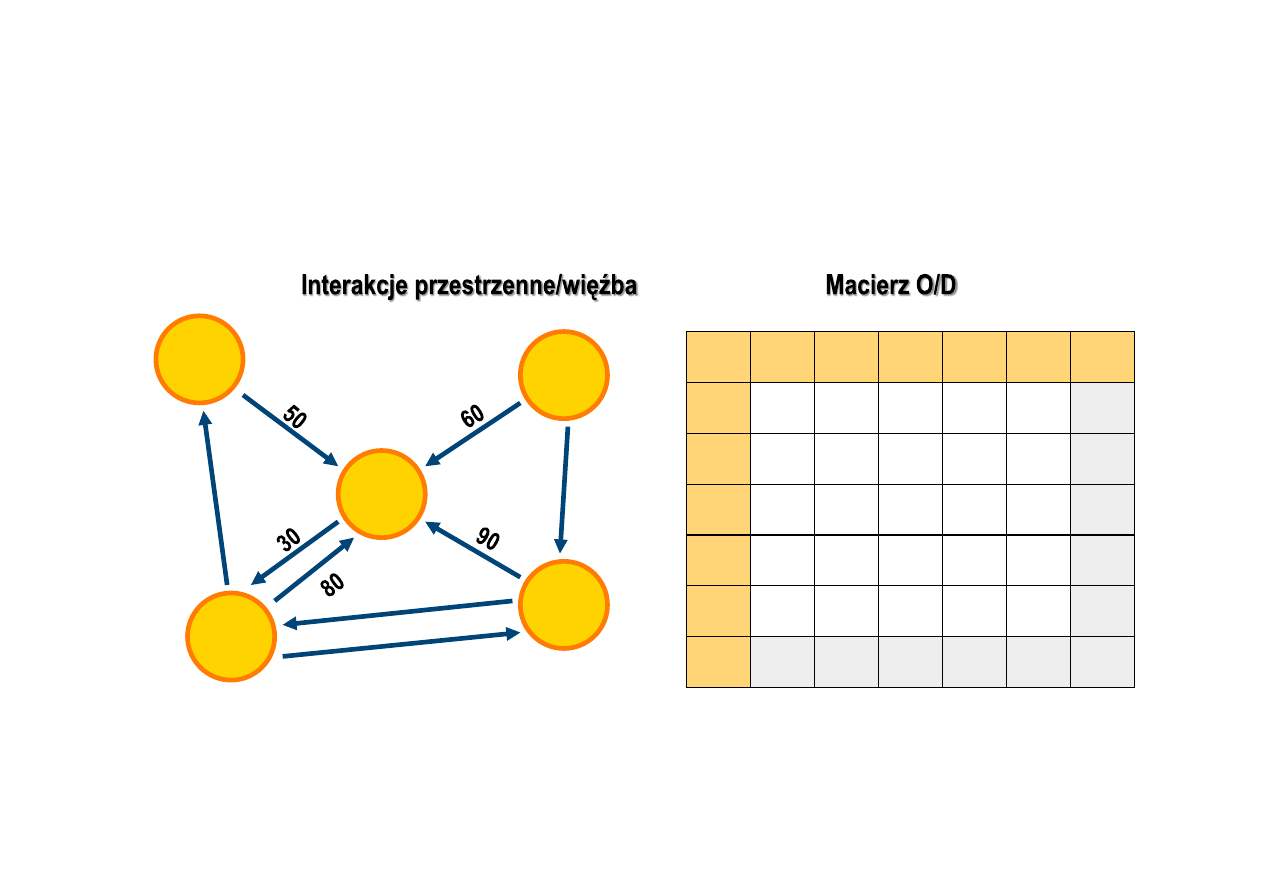
Konstruowanie macierzy O/D
A
B
C
D
E
Ti
A
0
0
50
0
0
50
B
0
0
60
0
30
90
C
0
0
0
30
0
30
D
20
0
80
0
20
120
E
0
0
90
10
0
100
Tj
20
0
280
40
50
390
A
C
B
E
D
20
20
10
30
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra University.
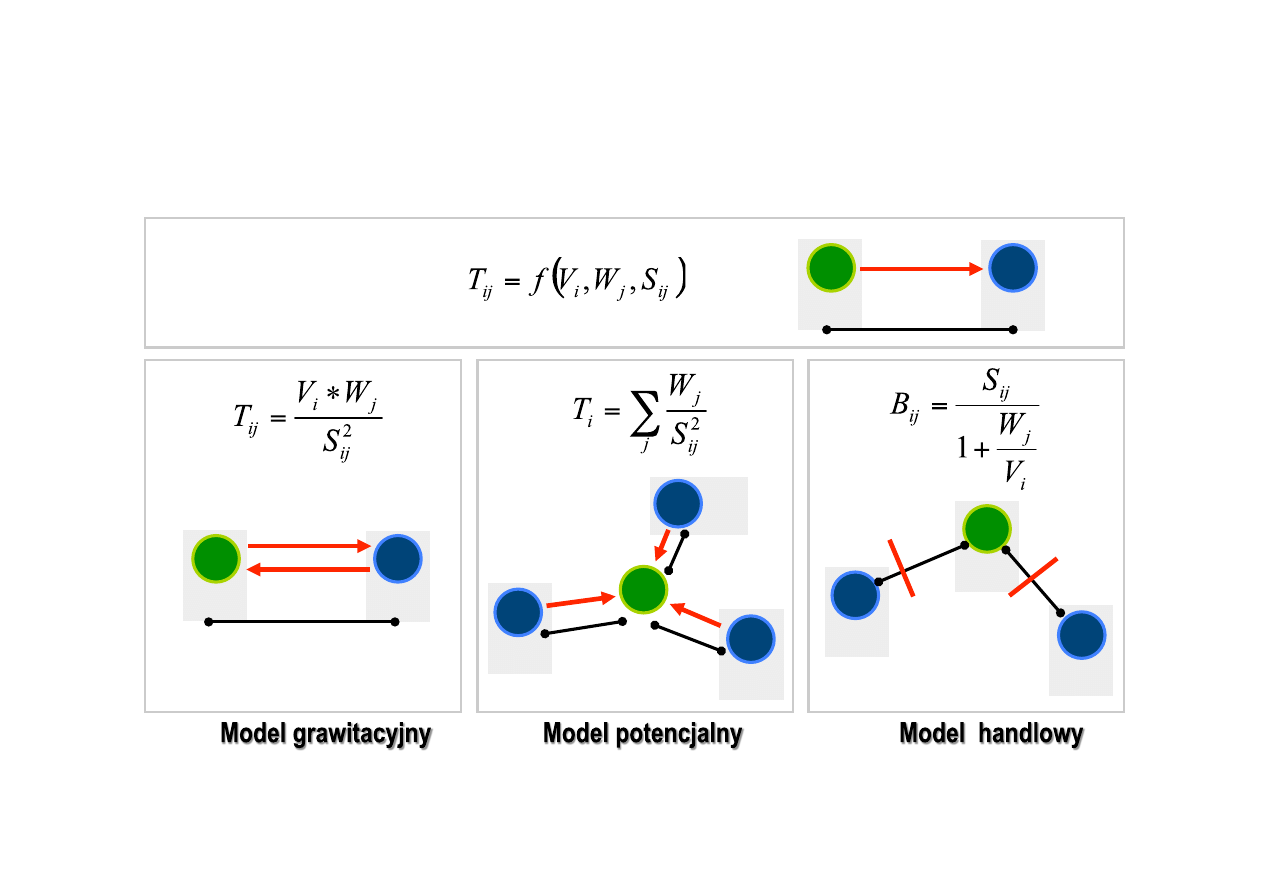
Trzy podstawowe modele interakcji
i
j
Formuła ogólna:
V
W
T
ij
S
ij
i
j
35
20
S
ij
= 8
T
ij
= 10.9
T
ji
= 10.9
i
j
k
l
20
15
35
3
5
6
1.0
0.6
2.2
T
i
= 3.8
i
j
k
15
40
35
7
6
B
ij
= 4.9
B
ik
= 2.8
Copyright © 1998-2010, Dr. Jean-Paul Rodrigue, Dept. of Global Studies & Geography, Hofstra
University.

Model wyboru środka transportu
•
Udział w podróżach kierowców, pasażerów
rowerzystów, pieszych itp.
•
Modelowanie logitowe uwzględniające
preferencje użytkowników jako
prawdopodobieństwo użycia środka
transportu na każdym połączeniu źródło – cel

Obciążenie ruchem
•
Szacowane przestrzenne wzorce przemieszczeń
różnymi środkami transportu, podróże są
przypisywane różnym połączeniom
transportowym
•
Są wykonywane głównie z zastosowaniem
operacyjnych metod badawczych
umożliwiających minimalizację kosztów lub czasu
podróży lub czasu w sieci transportowej
•
Modele “ograniczonej przepustowości” i
“wszystko albo nic” lub “wielu ścieżek”
Wyszukiwarka
Podobne podstrony:
04 PST Modelowanie w planowaniu transportu
modelowanie procesˇw transportowych
06 2 PST Proces planowania
04 Magazynowanie, składowanie oraz transport materiałów
Metodyka modelowania systemów transportowych
mechanika 04[1].09.2006, PW Transport, Gadżety i pomoce PW CD2, MECHANIKA, od leny
Planowanie log 16.04.2011 sob, Planowanie
Modelowanie i planowanie akustyki1
Modelowanie procesów transportowych
Modelowanie usług transportowych w obszarze działania centrum logistyczno dystrybucyjnego
04 SPAWALNICTWO MAZ, PW Transport, Gadżety i pomoce PW CD2, PODSTAWY BUDOWY MASZYN, PBM, Piotrek spa
modelowanie procesˇw transportowych
06 2 PST Proces planowania
Metodyka modelowania systemów transportowych
10 Planowanie transportu ładunków
ruch harmoniczny, Transport i Logistyka (AM) 1 (semestr I), Fizyka, fiza laborki (rozwiązania), Cw 0
17 Transport eoliczny (21 04 2011)
więcej podobnych podstron