1
LABORATORIUM PODSTAW AUTOMATYKI
IMIĘ i NAZWISKO
NR ĆW.
TEMAT ĆWICZENIA
OCENA
Łukasz Borkowski
Jakub Binkowski
1
CHARAKTERYSTYKI DYNAMICZNE
PODSTAWOWE CZŁONY DYNAMICZNE
ROK
GRUPA
DATA
2011/2012
12M1
2
I STANOWISKO POMIAROWE
3
II CEL ĆWICZENIA
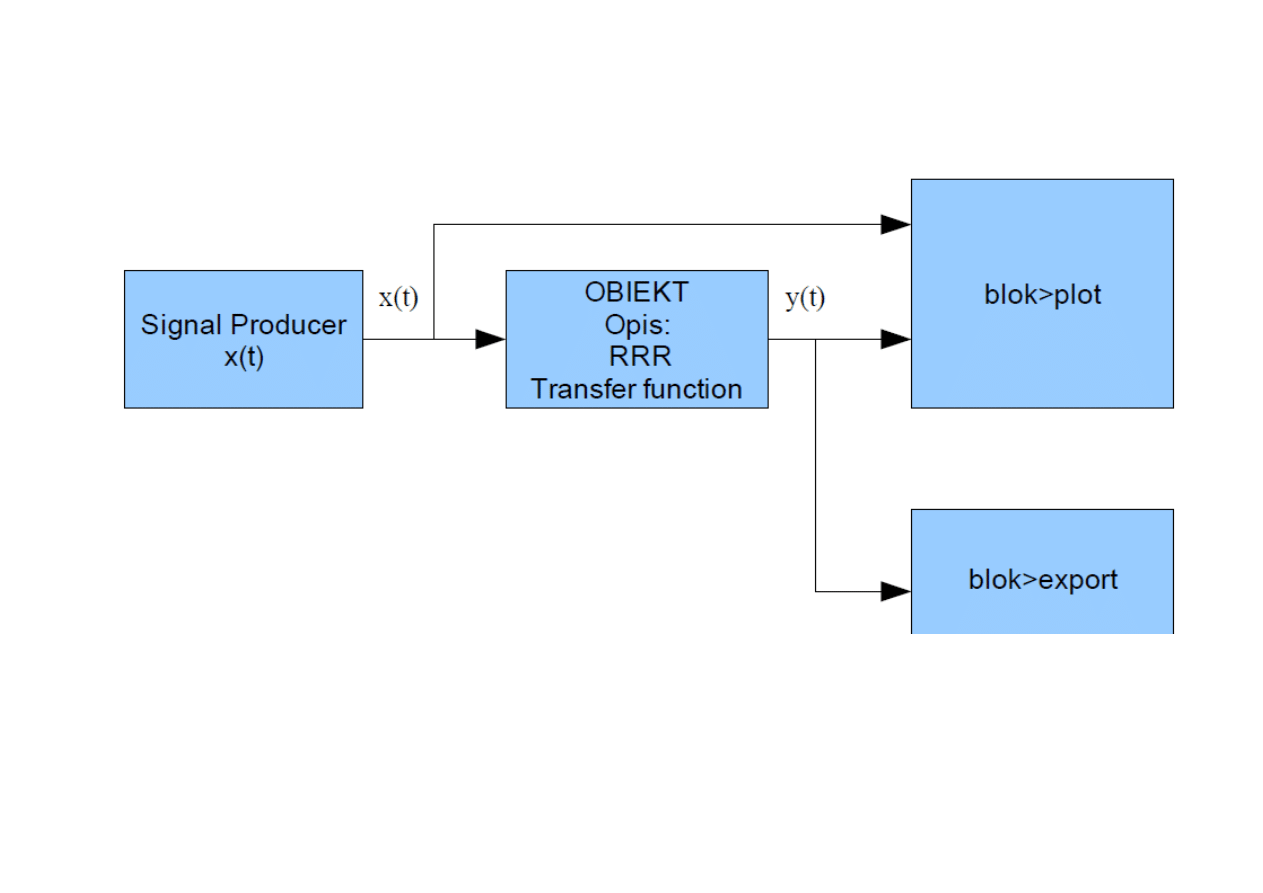
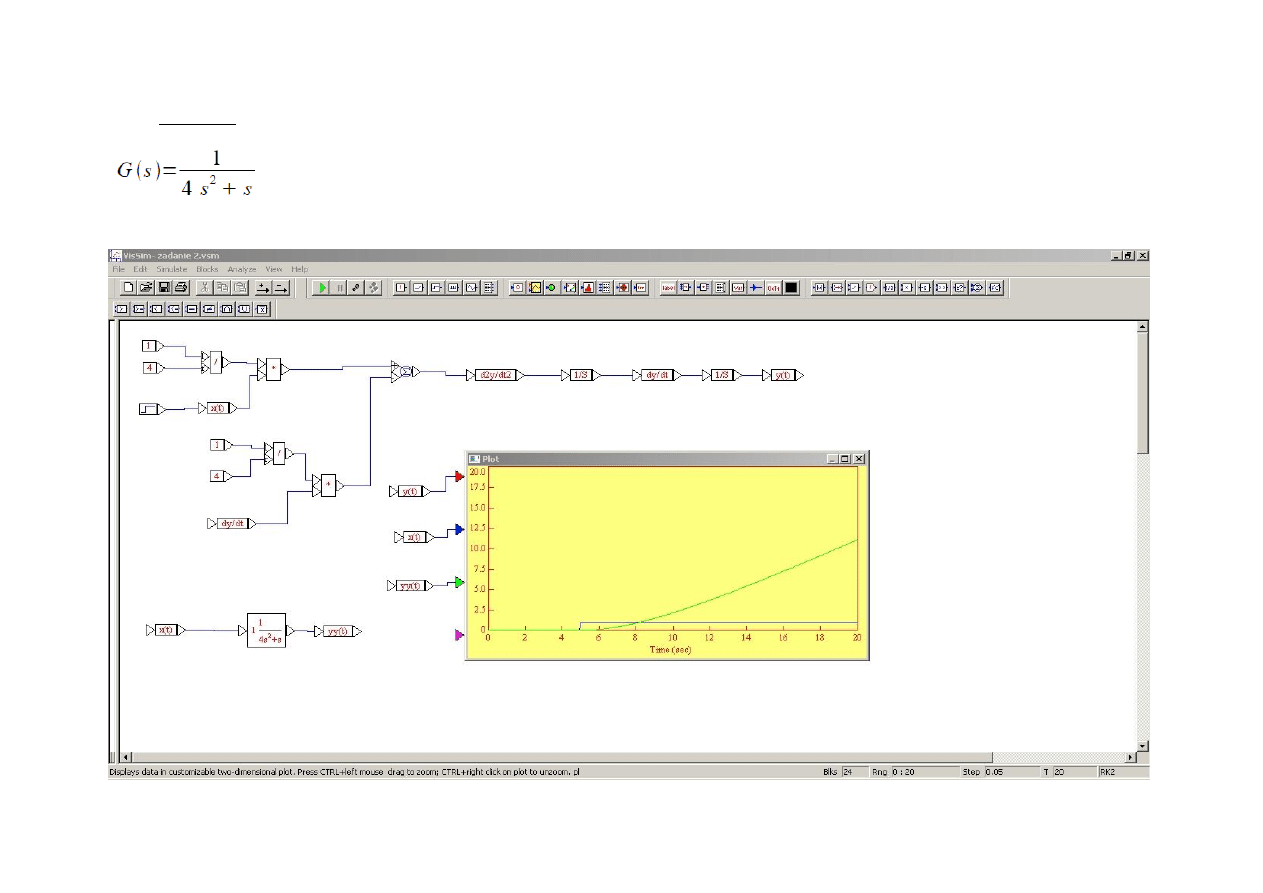
Zadanie 1: Wyznacz transmitancji operatorową lub równanie (rrr), diagram symulacyjny uwzględniający rrr jak i transmitancję
operatorową oraz charakterystyki dynamiczne, dla poniższego przykładu:
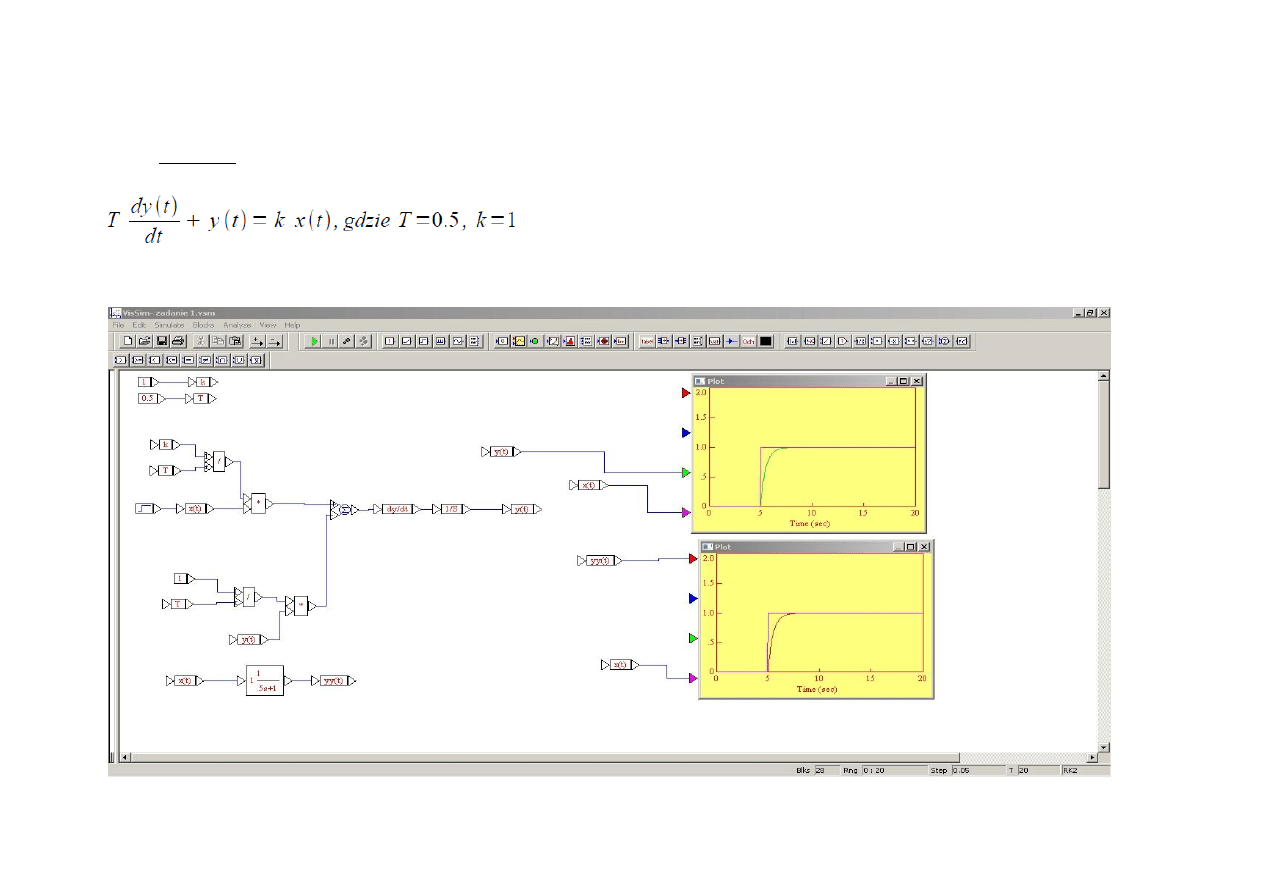
ZADANIE 1
Widok całego okna
4
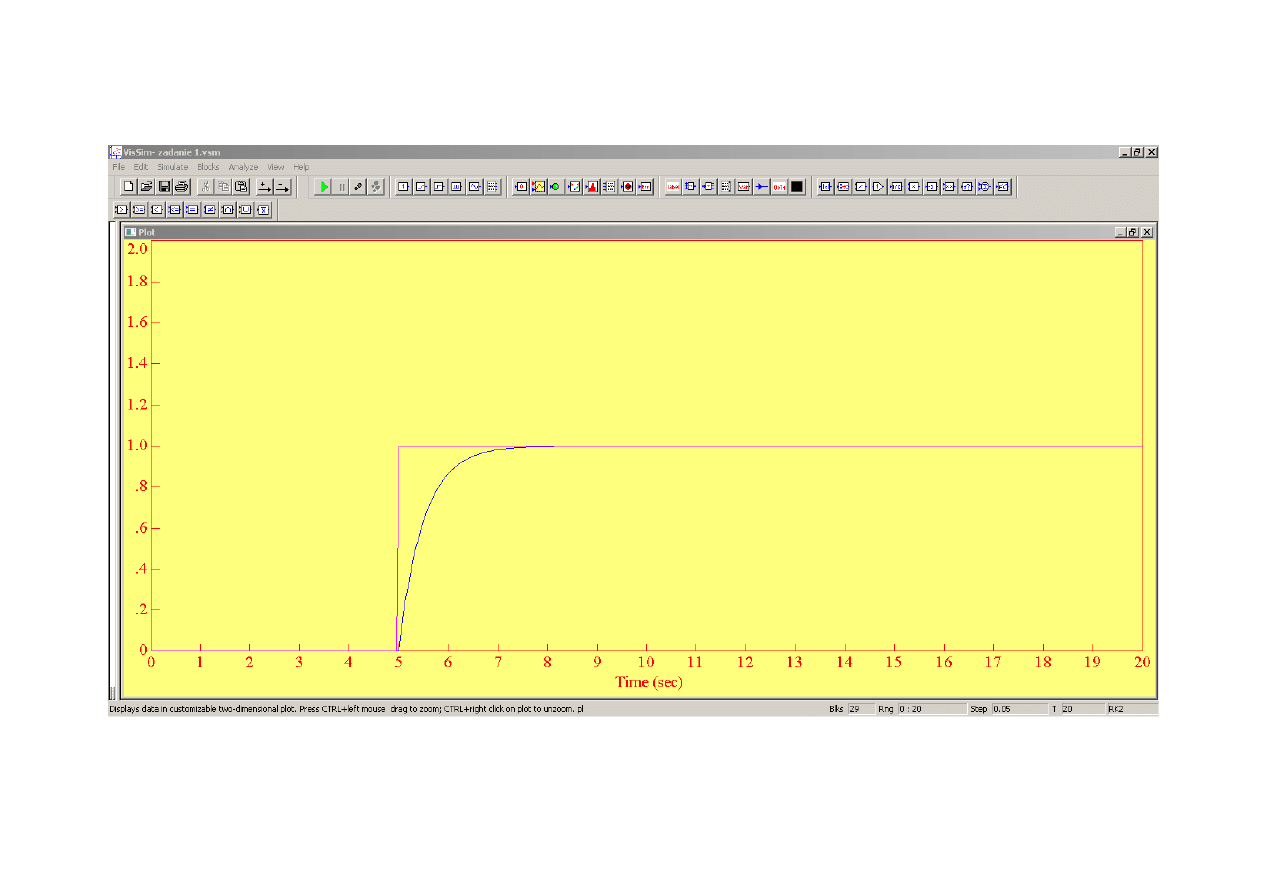
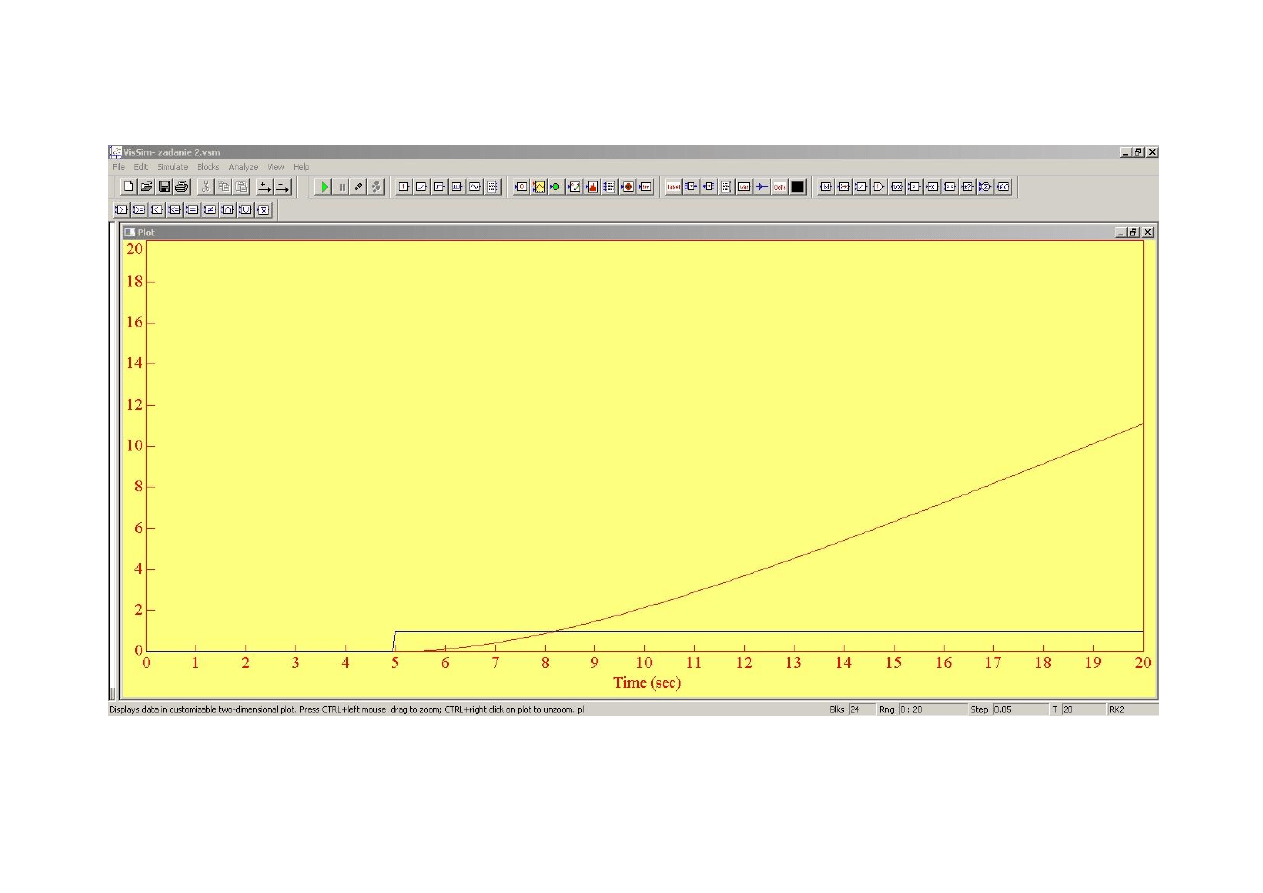
Wykres charakterystyk dynamicznych. Plot z podpiętymi: x(t), y(t) oraz yy(t).
Jak widać powyżej charakterystyki dynamiczne y(t) oraz yy(t) pokrywają się, co oznacza, że transmitancja operatorowa została dobrze
przeprowadzona. Blok symulacyjny został zbudowany poprawnie.
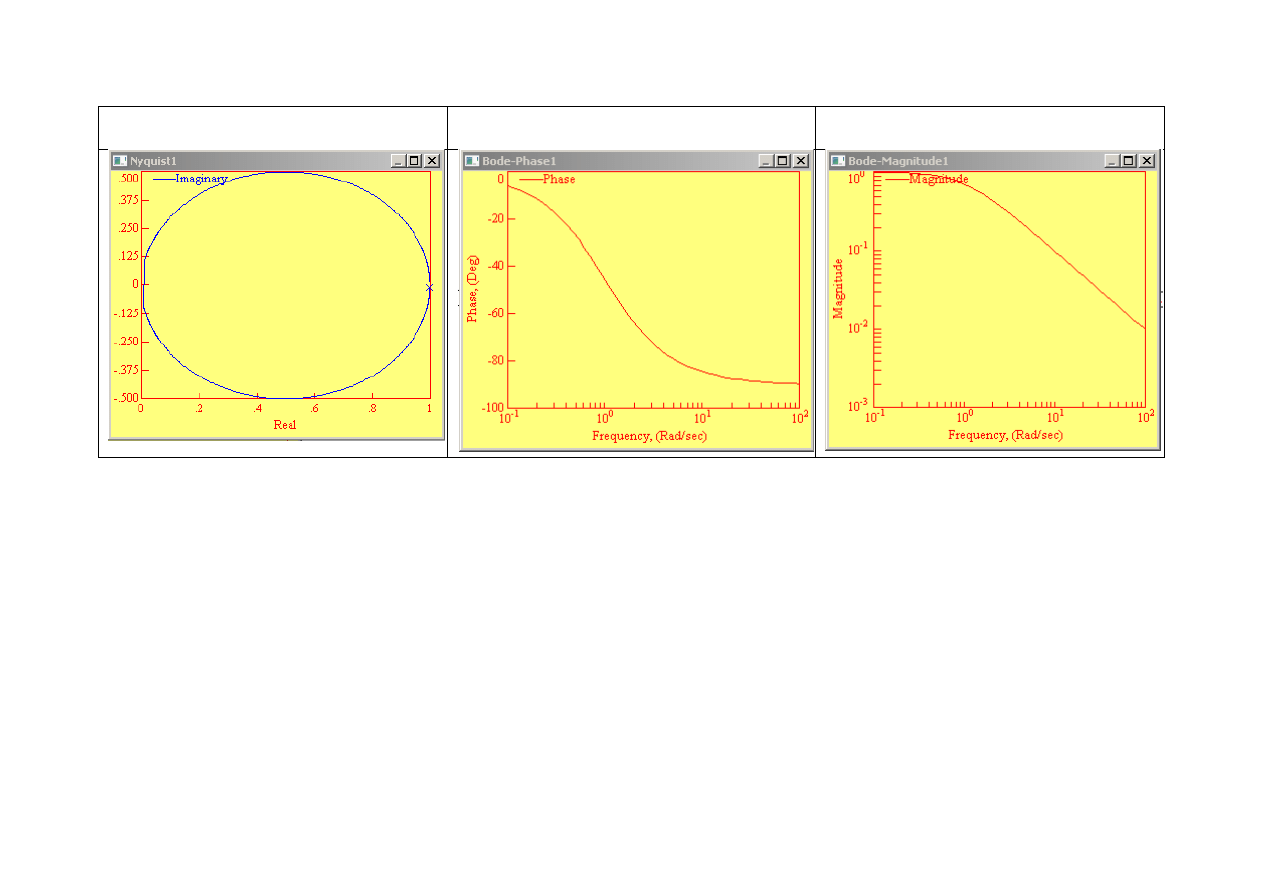
5
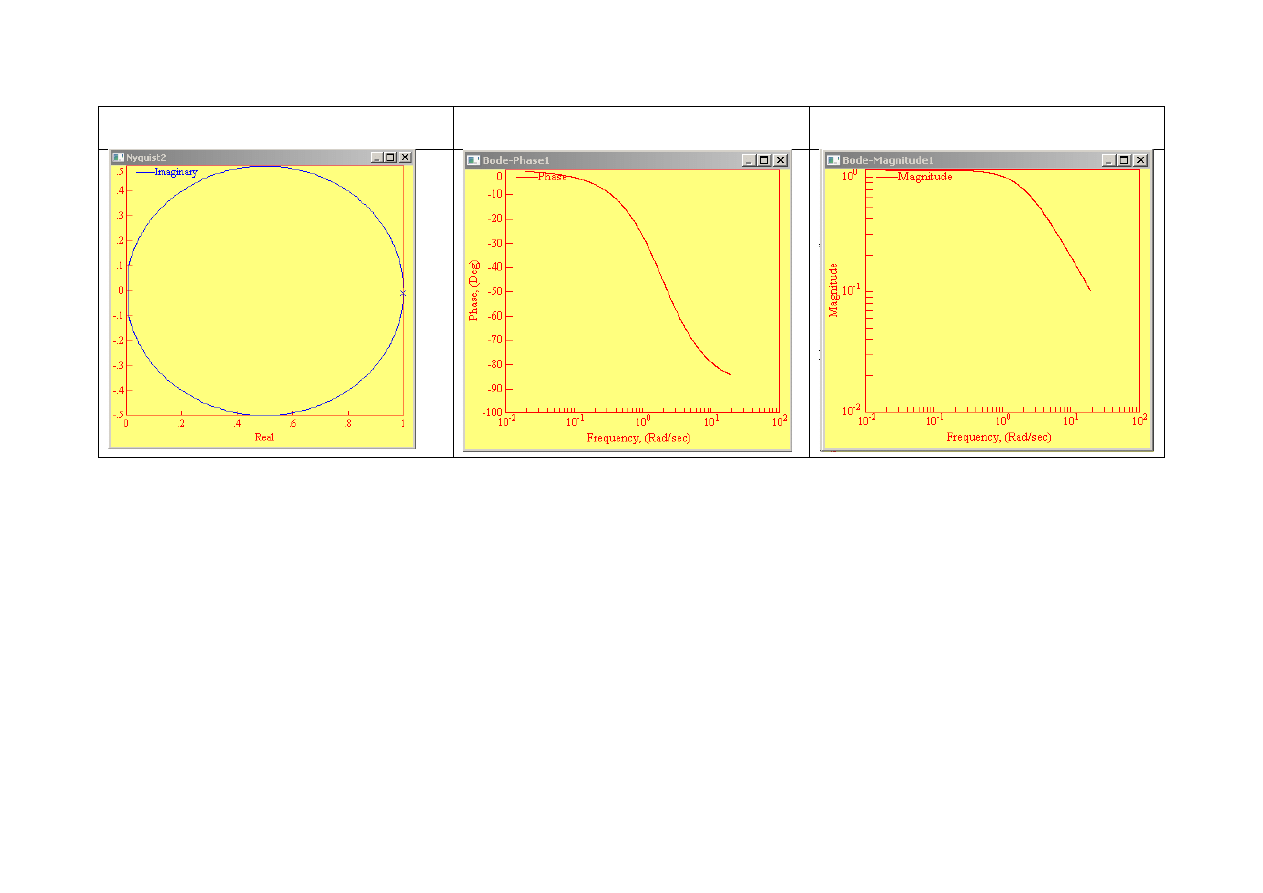
Odpowiedź Nyquist response
Odpowiedź Frequency response (Bode-Phase) Odpowiedź Frequency response (Bode-
Magnitude)
6
Zadanie 2: Wyznacz transmitancji operatorową lub równanie (rrr), diagram symulacyjny uwzględniający rrr jak i transmitancję
operatorową oraz charakterystyki dynamiczne, dla poniższego przykładu:
Widok całego okna
7
Wykres charakterystyk dynamicznych. Plot z podpiętymi: x(t), y(t) oraz yy(t).
Podobnie jak w poprzednim zadaniu charakterystyki dynamiczne y(t) oraz yy(t) pokrywają się, co także oznacza, że transmitancja operatorowa
została prawidłowo przeprowadzona oraz, że diagram symulacyjny został zbudowany prawidłowo.
8
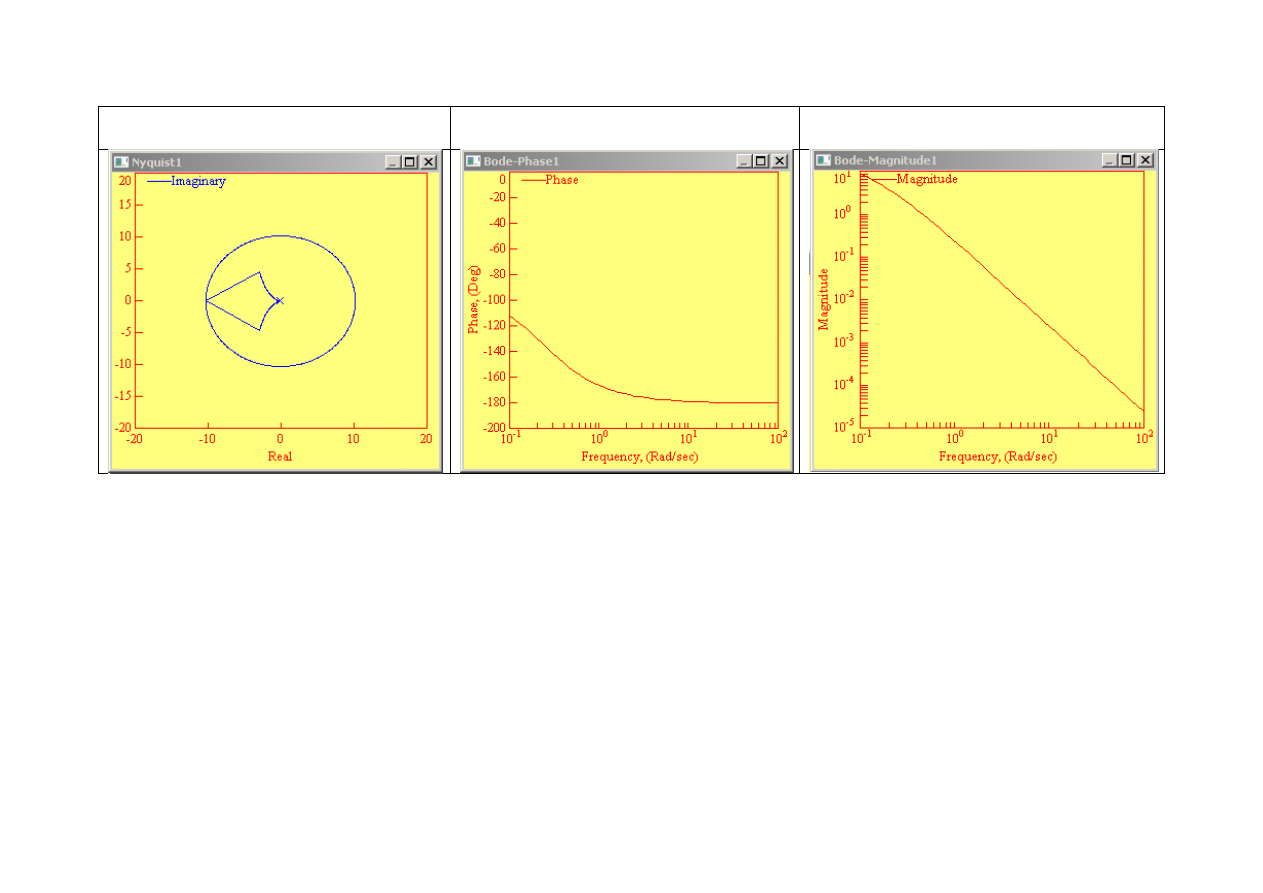
Odpowiedź Nyquist response
Odpowiedź Frequency response (Bode-
Phase)
Odpowiedź Frequency response (Bode-
Magnitude)
9
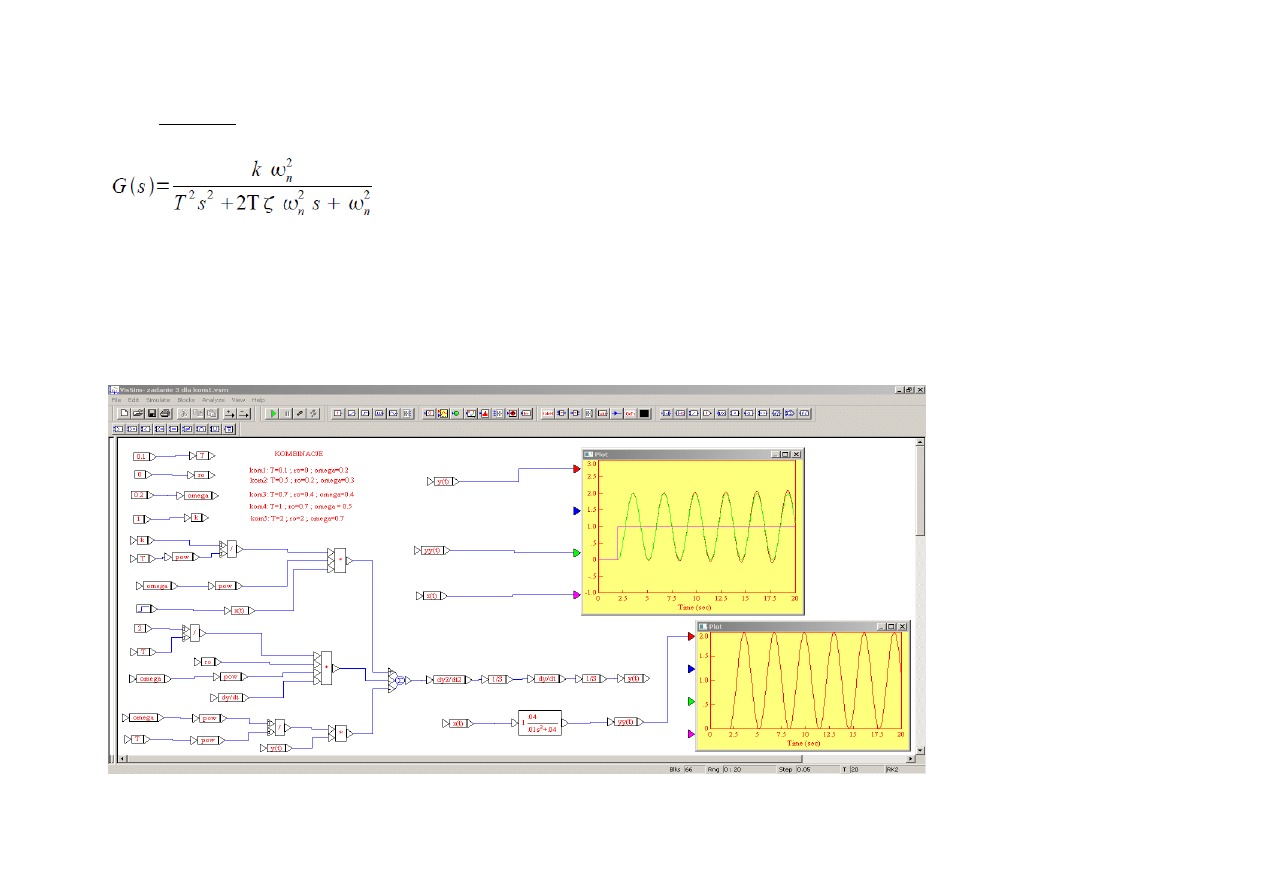
Zadanie 3: Wyznacz transmitancji operatorową lub równanie (rrr), diagram symulacyjny uwzględniający rrr jak i transmitancję
operatorową oraz charakterystyki dynamiczne, dla poniższego przykładu:
Zbuduj diagram symulacyjny zbadaj odpowiedź układu na skok jednostkowy 1(t) ustaw opóźnienie na 2 [s], wyznacz wykresy dla
następujących parametrów współczynnika ζ (0, 0.2, 0.4, 0.7, 2 ) , T(0.1, 0.5, 0.7, 1, 2 ) oraz ωn (0.2, 0.3, 0.4, 0.5, 0.7 ) - naraz zmieniaj jeden
parametr. Zestaw otrzymane wykresy na wykresie zbiorczym, dla zmian danego parametru. Wstaw blok transmitancji operatorowej i uzupełnij
go, wykreśl odpowiedź: Step response, Frequency response, Nyquist response.
Widok całego okna
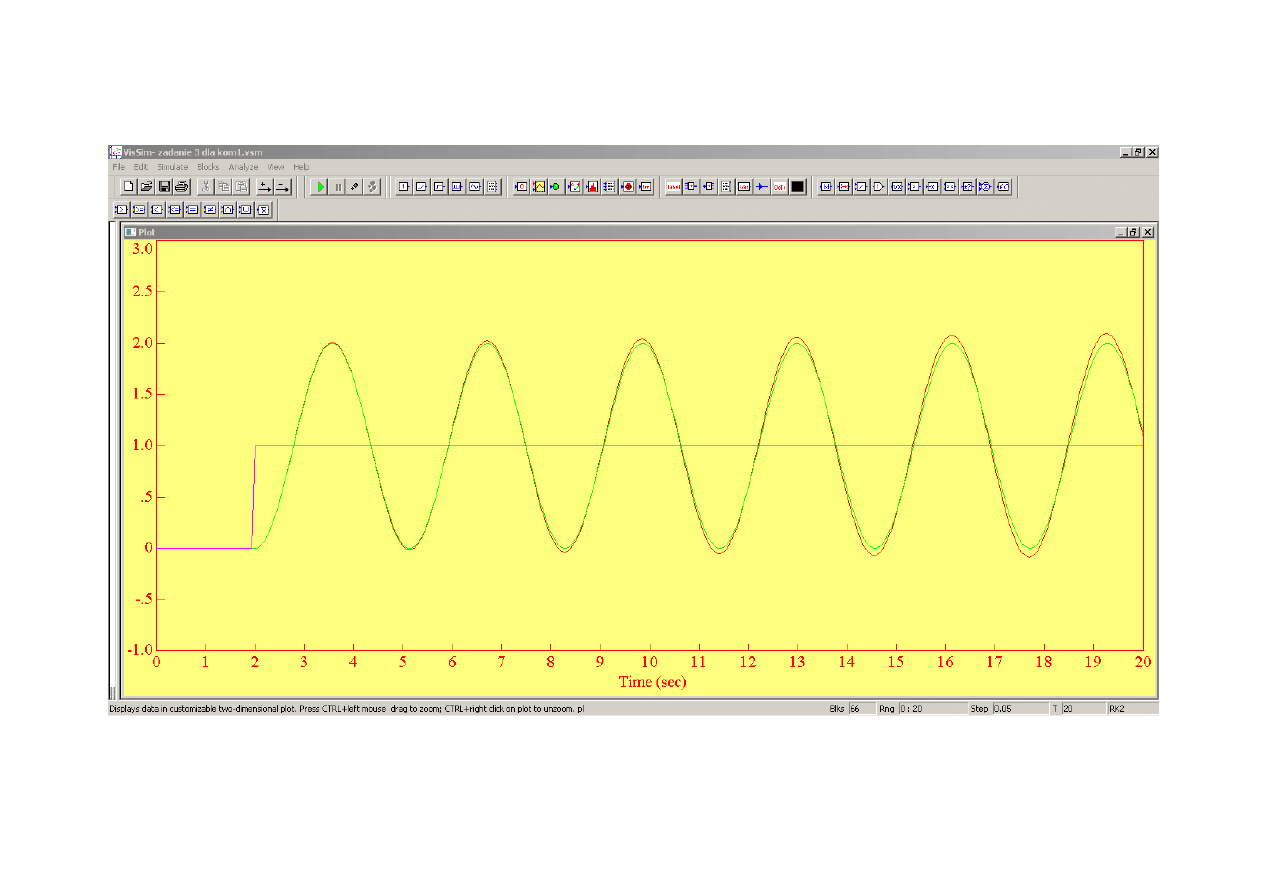
10
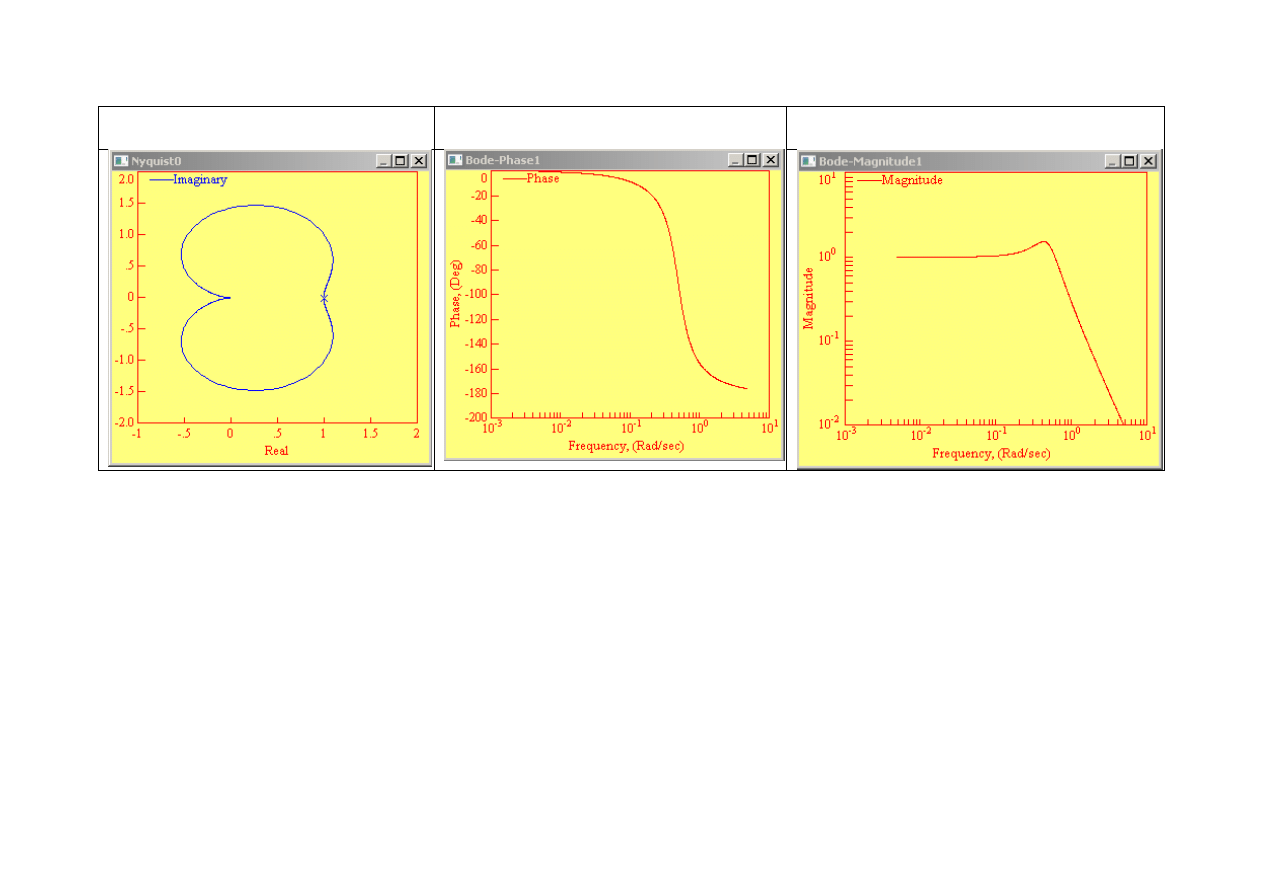
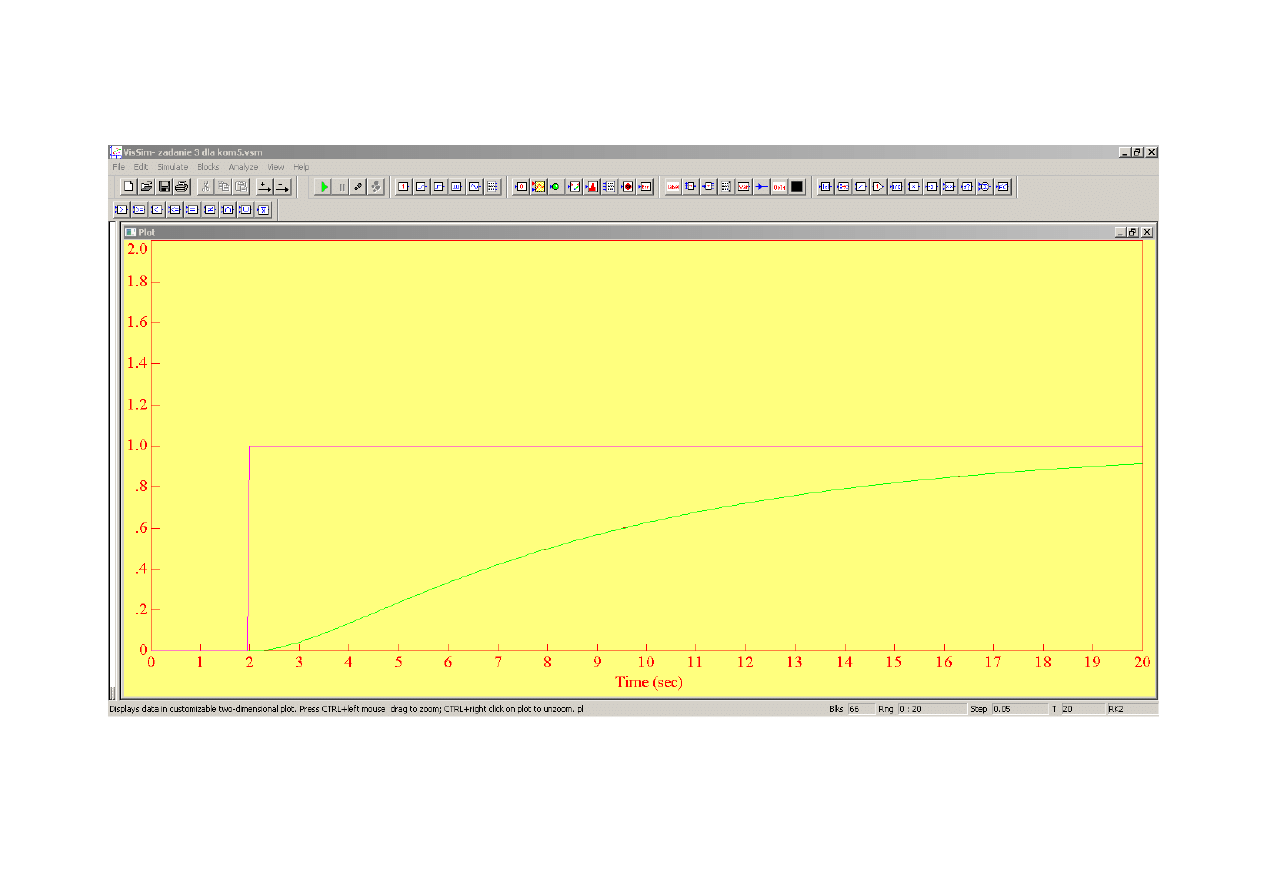
Charakterystyka dynamiczna dla kombinacji 1, tj.: T=0.1 ; ro=0 ; omega=0.2
11
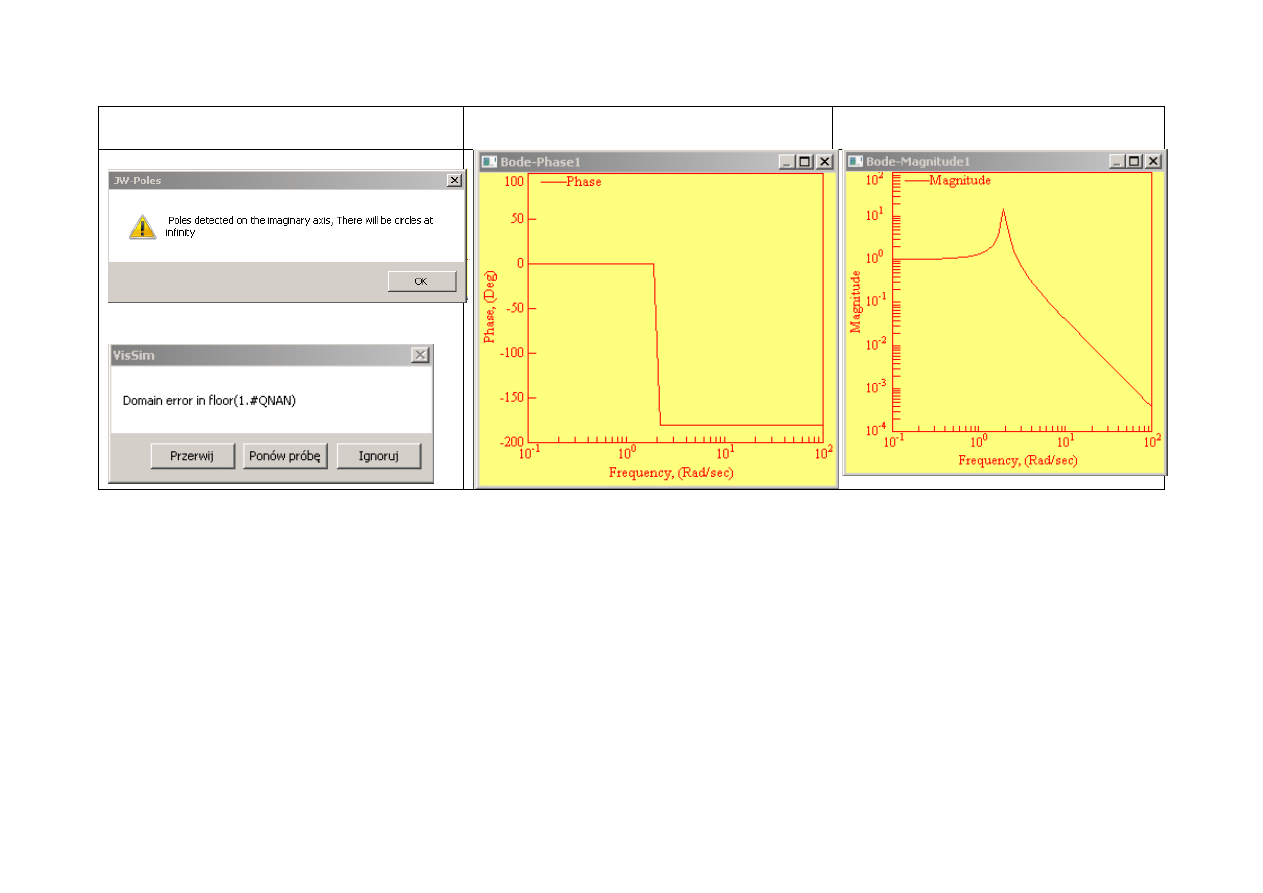
Odpowiedź Nyquist response
Odpowiedź Frequency response (Bode-Phase)
Odpowiedź Frequency response (Bode-
Magnitude)
Otrzymujemy następujący błąd:
Po kliknięciu OK pojawia się następujące
okienko:
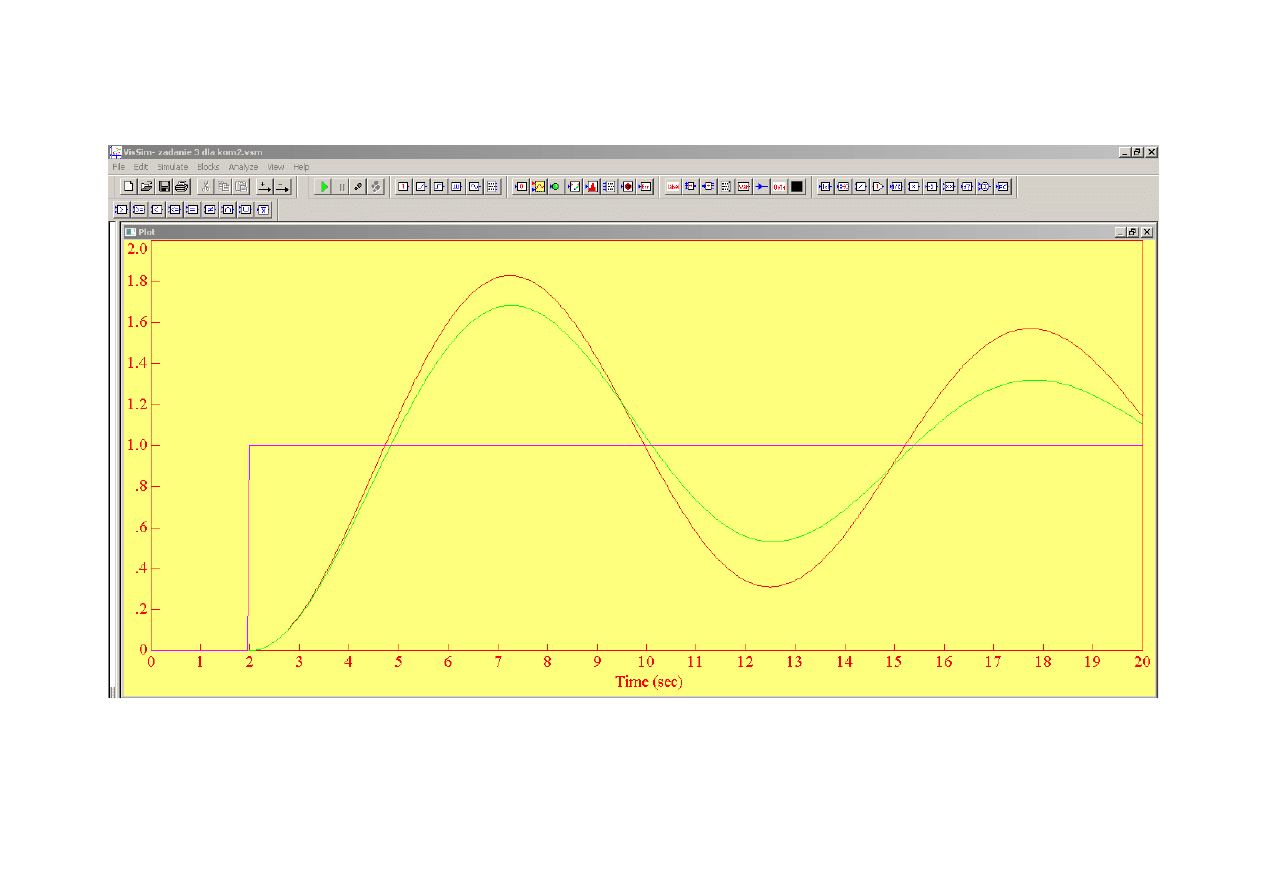
12
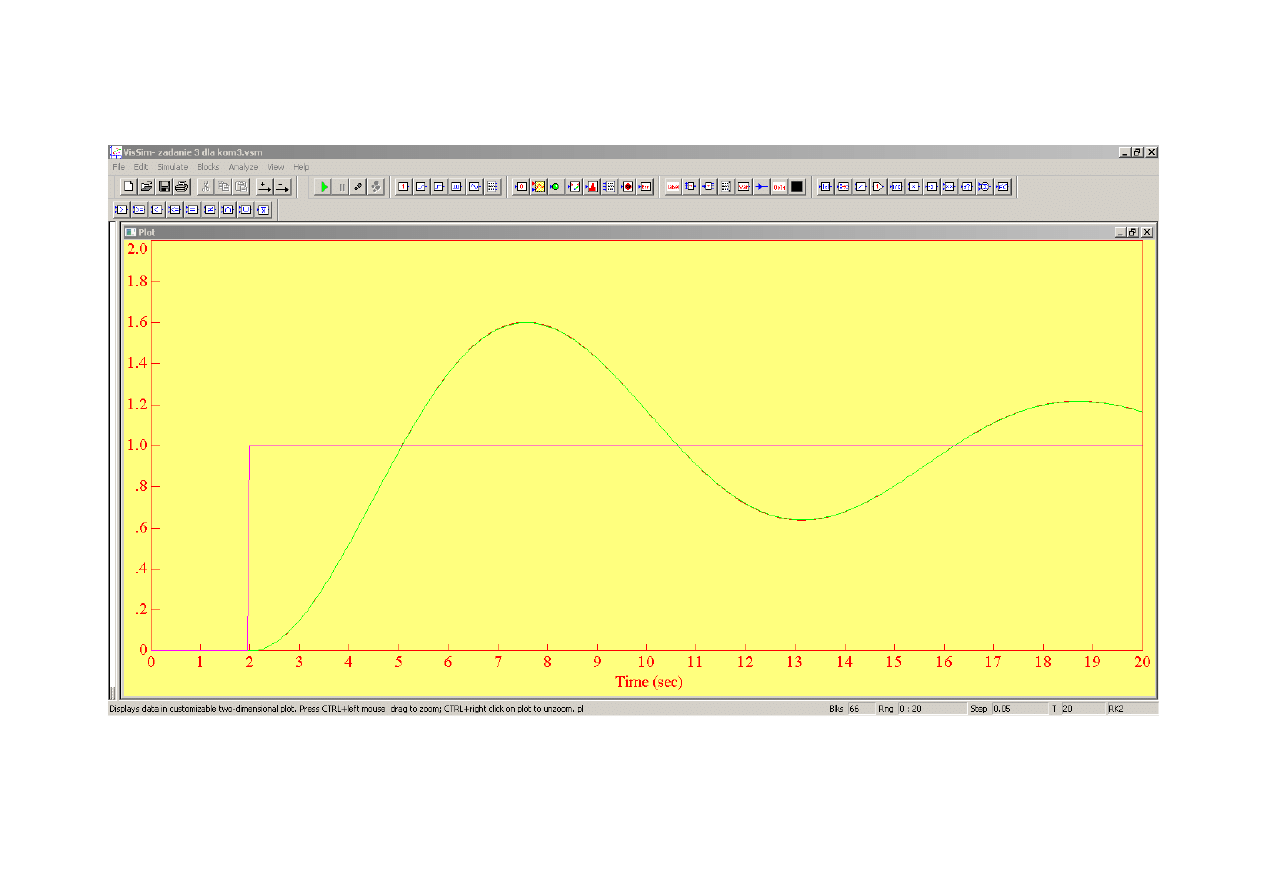
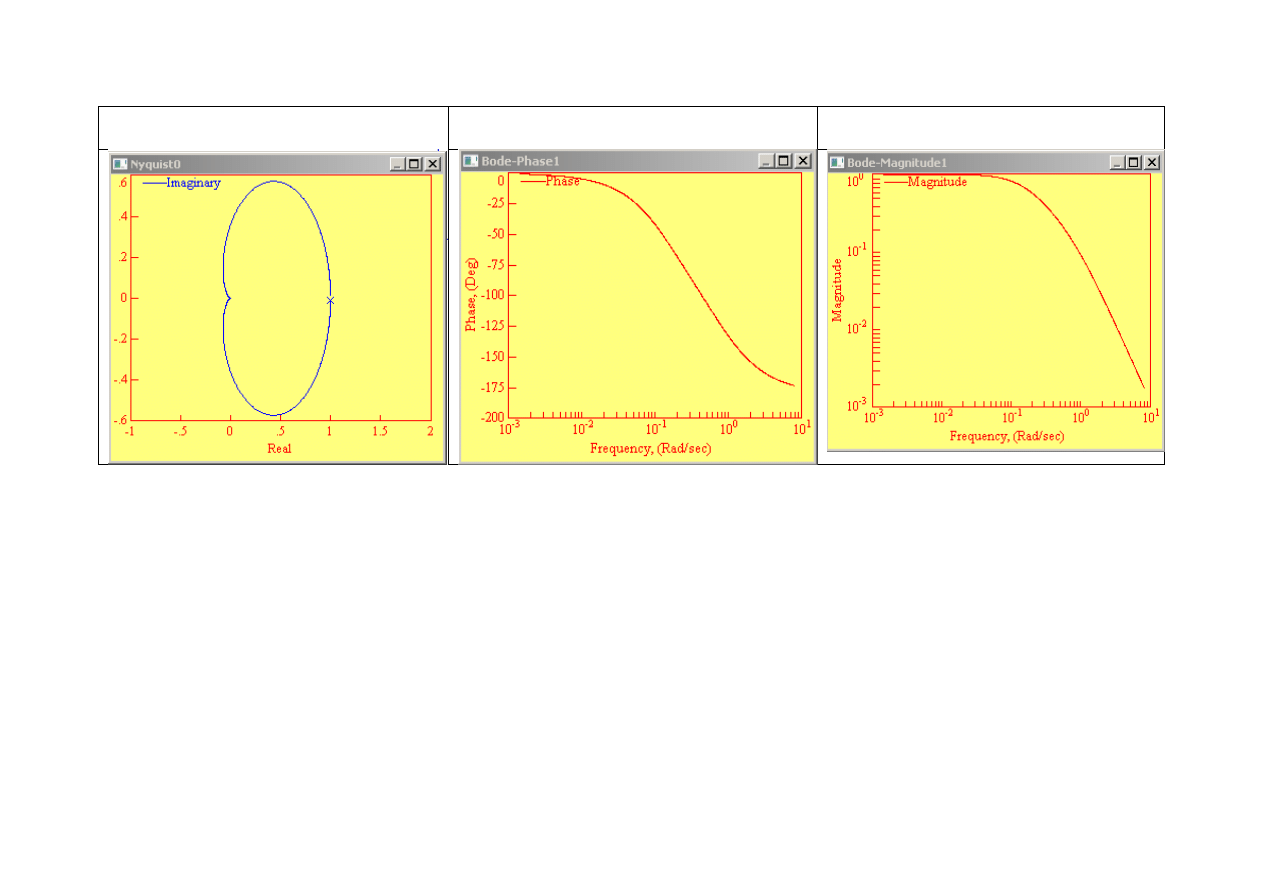
Charakterystyka dynamiczna dla kombinacji 2, tj.: T=0.5 ; ro=0.2 ; omega=0.3
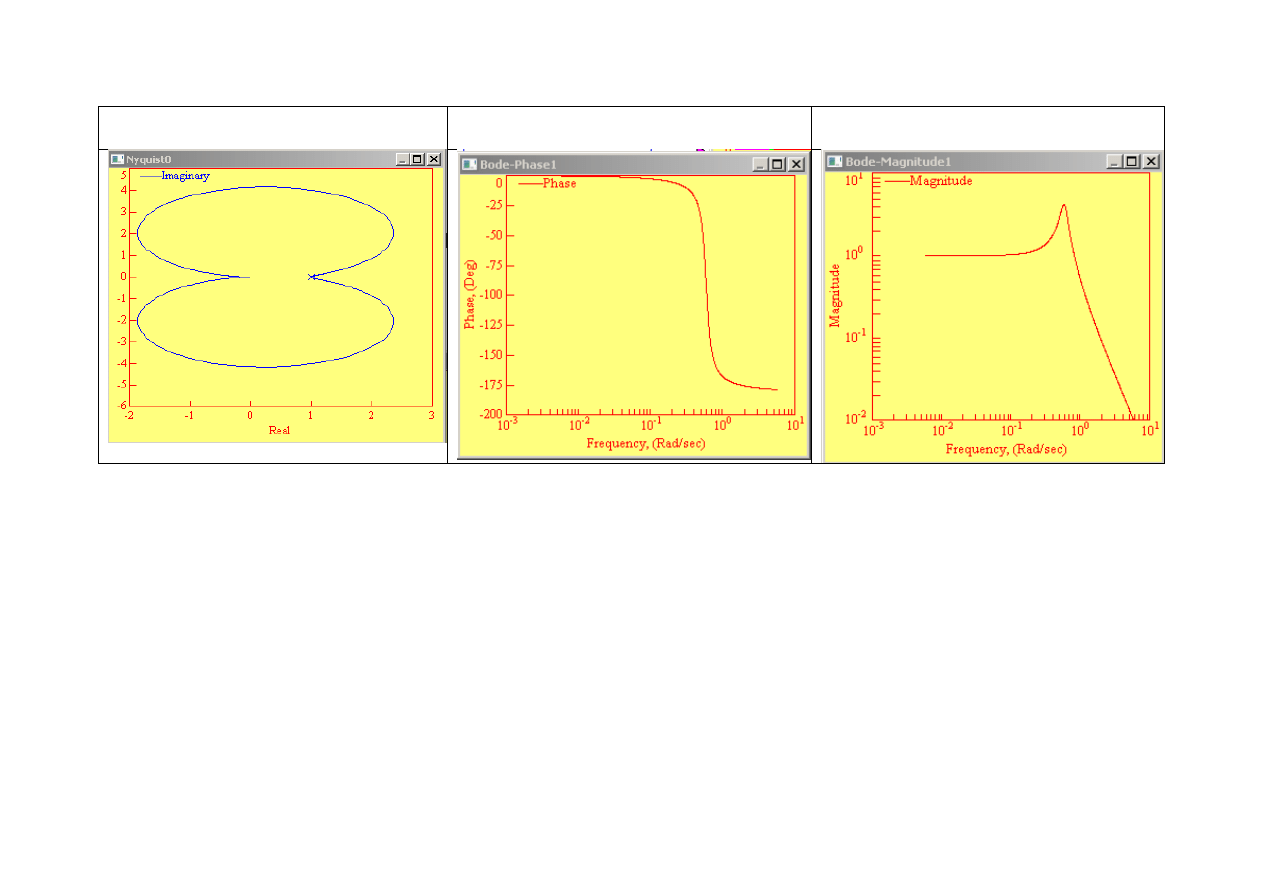
13
Odpowiedź Nyquist response
Odpowiedź Frequency response (Bode-Phase)
Odpowiedź Frequency response (Bode-
Magnitude)
14
Charakterystyka dynamiczna dla kombinacji 3, tj.: T=0.7 ; ro=0.4 ; omega=0.4
15
Odpowiedź Nyquist response
Odpowiedź Frequency response (Bode-Phase)
Odpowiedź Frequency response (Bode-
Magnitude)
16
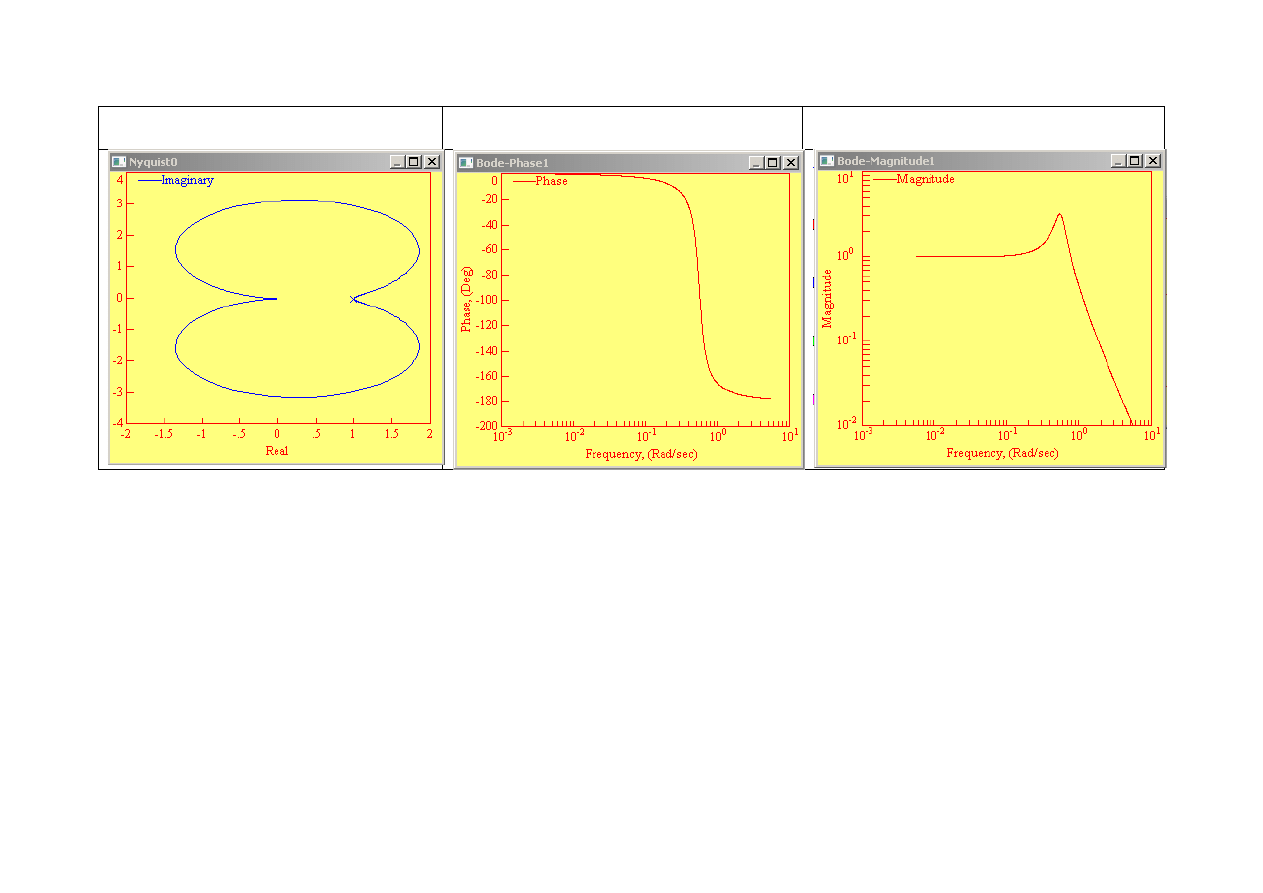
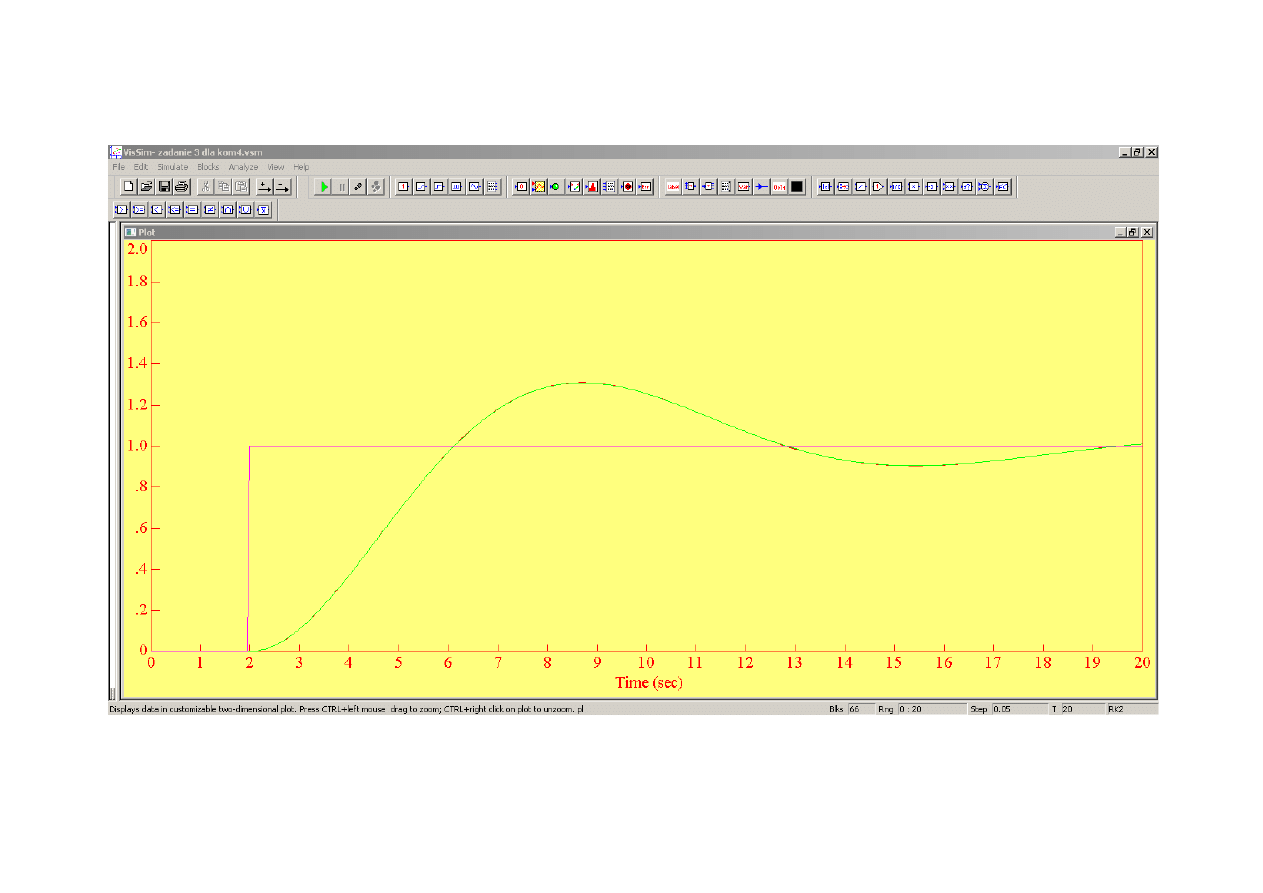
Charakterystyka dynamiczna dla kombinacji 4, tj.: T=1 ; ro=0.7 ; omega = 0.5
17
Odpowiedź Nyquist response
Odpowiedź Frequency response (Bode-Phase) Odpowiedź Frequency response (Bode-
Magnitude)
18
Charakterystyka dynamiczna dla kombinacji 5, tj.: T=2 ; ro=2 ; omega=0.7
19
Odpowiedź Nyquist response
Odpowiedź Frequency response (Bode-Phase)
Odpowiedź Frequency response (Bode-
Magnitude)
20
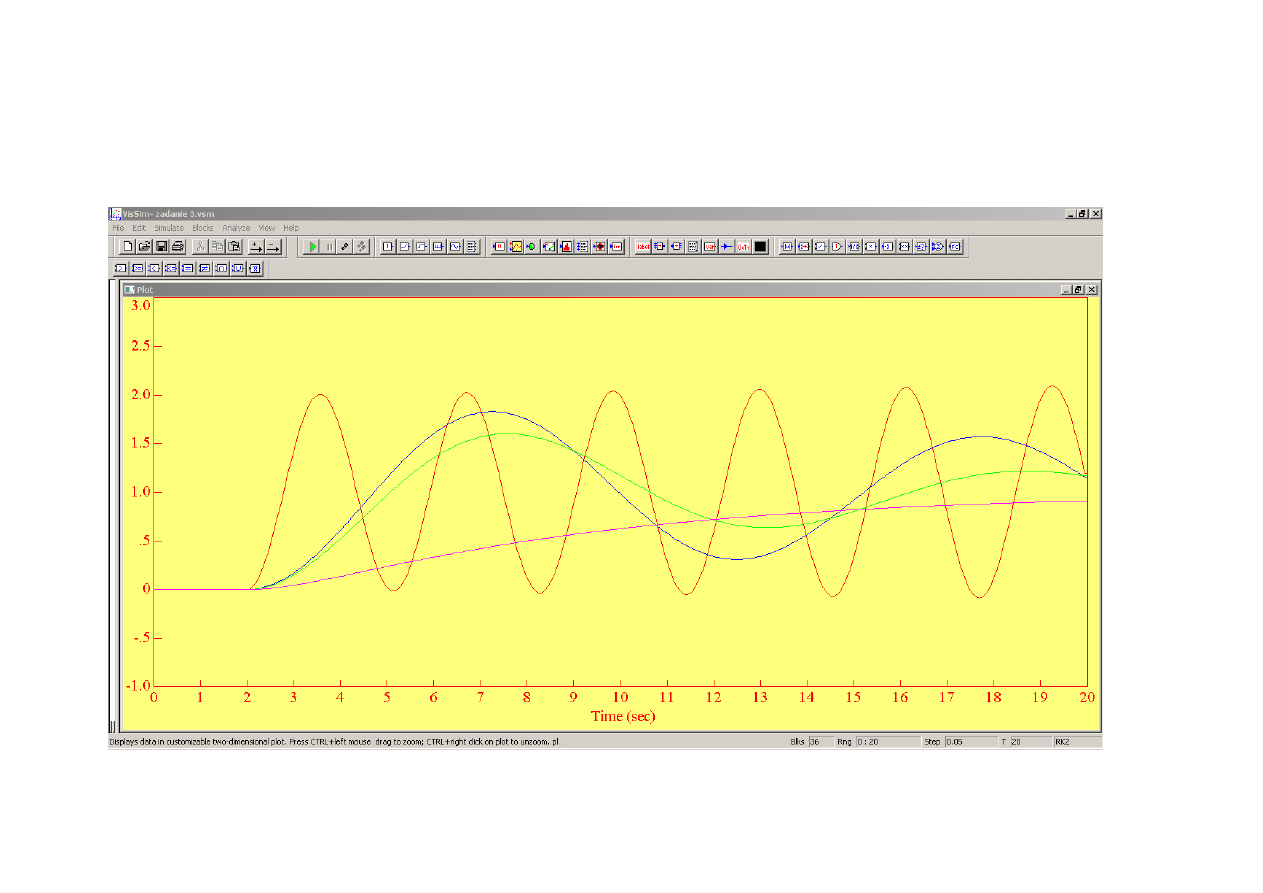
Wykres zbiorczy przedstawiający charakterystyki dynamiczne dla kombinacji 1,2,3 i 5 (gdzie kolor czerwony – kombinacja 1, niebieski –
kombinacja 2, zielony – kombinacja 3, fioletowy – kombinacja 5).
Jak widać, na poniższym wykresie pominęliśmy kombinację nr4, ponieważ nie mogliśmy dodać piątego konektora.

21
WNIOSKI:
W przypadku kombinacji 3,4 i 5 nie mieliśmy żadnych problemów. Charakterystyki dynamiczne pokryły się, co oznacza, że prawidłowo
zbudowaliśmy diagram symulacyjny i prawidłowo przeprowadziliśmy transmitancję operatorową.
W przypadku kombinacji 1 wykres powoli, nieznacznie zaczyna się rozbiegać, a w przypadku kombinacji 2 rozbieżności są już duże. Nie
potrafimy wskazać przyczyn takiego problemu. Wykluczyliśmy jako powód zły diagram symulacyjny, a także źle przeprowadzoną transmitancję
operatorową, ponieważ są one takie same jak w przypadku kombinacji 3,4 i 5, z którymi nie było żadnych problemów.
22
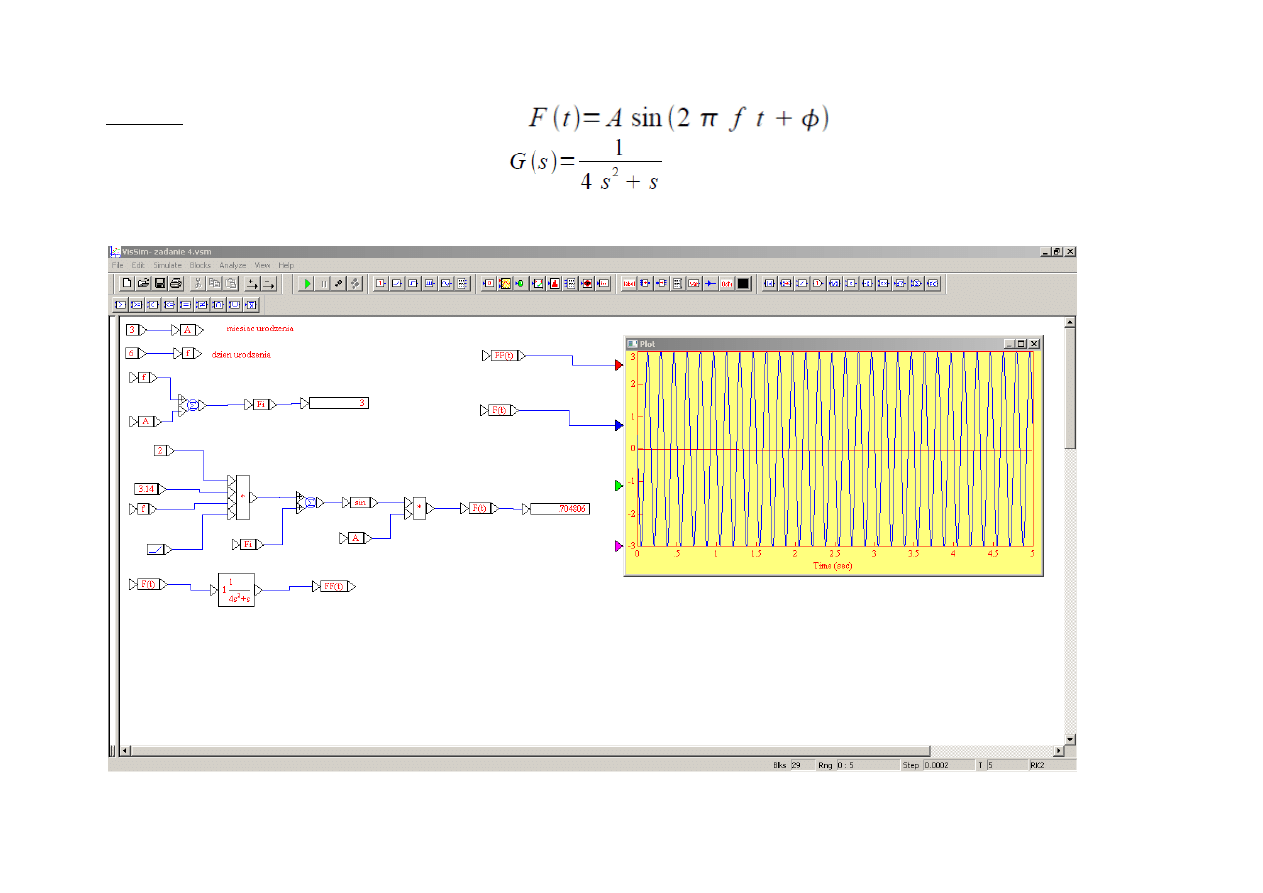
Zadanie 4: Wyznacz odpowiedź na wymuszenie funkcją
gdzie, A – to miesiąc urodzenia, f – dzień
urodzenia, ϴ=f-A, dla układu opisanego transmitancją
Widok całego okna:
23
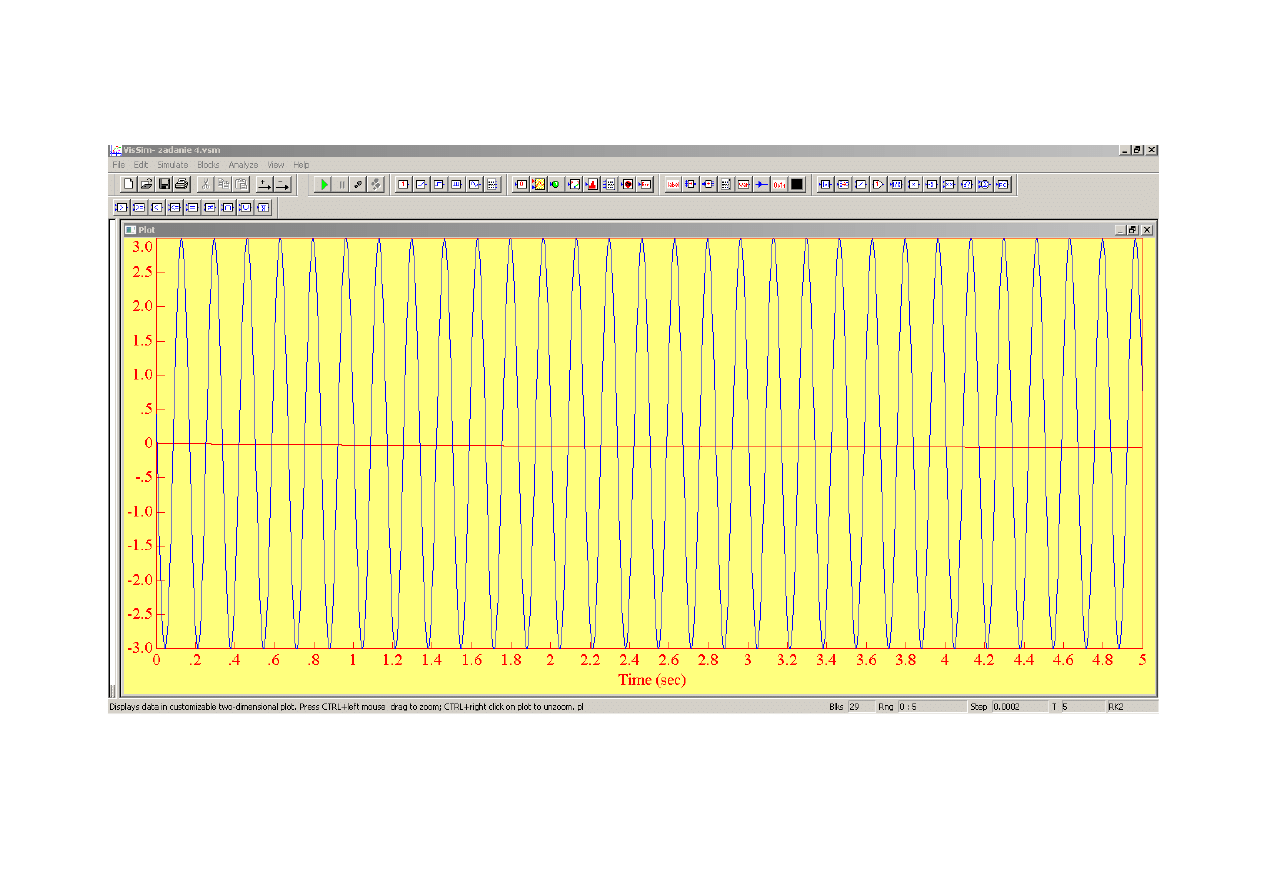
Charakterystyka dynamiczna:
24
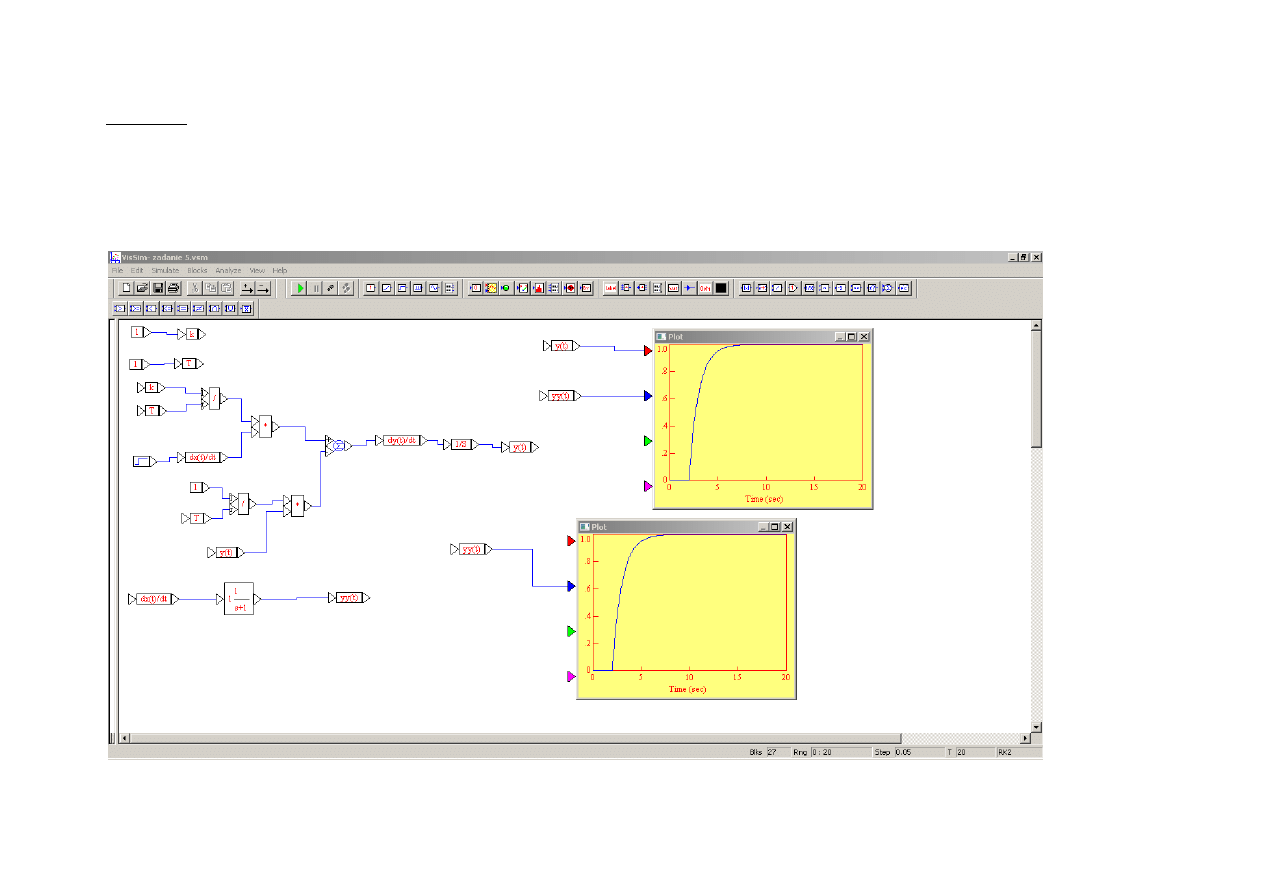
Zadanie 5: Opracowanie tematu zadanego - Wyznacz charakterystyki: Step response, Frequency response, Nyquist response zadanego
podstawowego członu dynamicznego przy pomocy Vissima. Podaj przykładowe elementy rzeczywistych urządzeń technicznych, które można
modelować za pomocą opisywanego członu, oraz jego charakterystyki graficzne i zależności analityczne.
W naszym przypadku mieliśmy do opracowania człon różniczkujący rzeczywisty.
Widok całego okna:
25
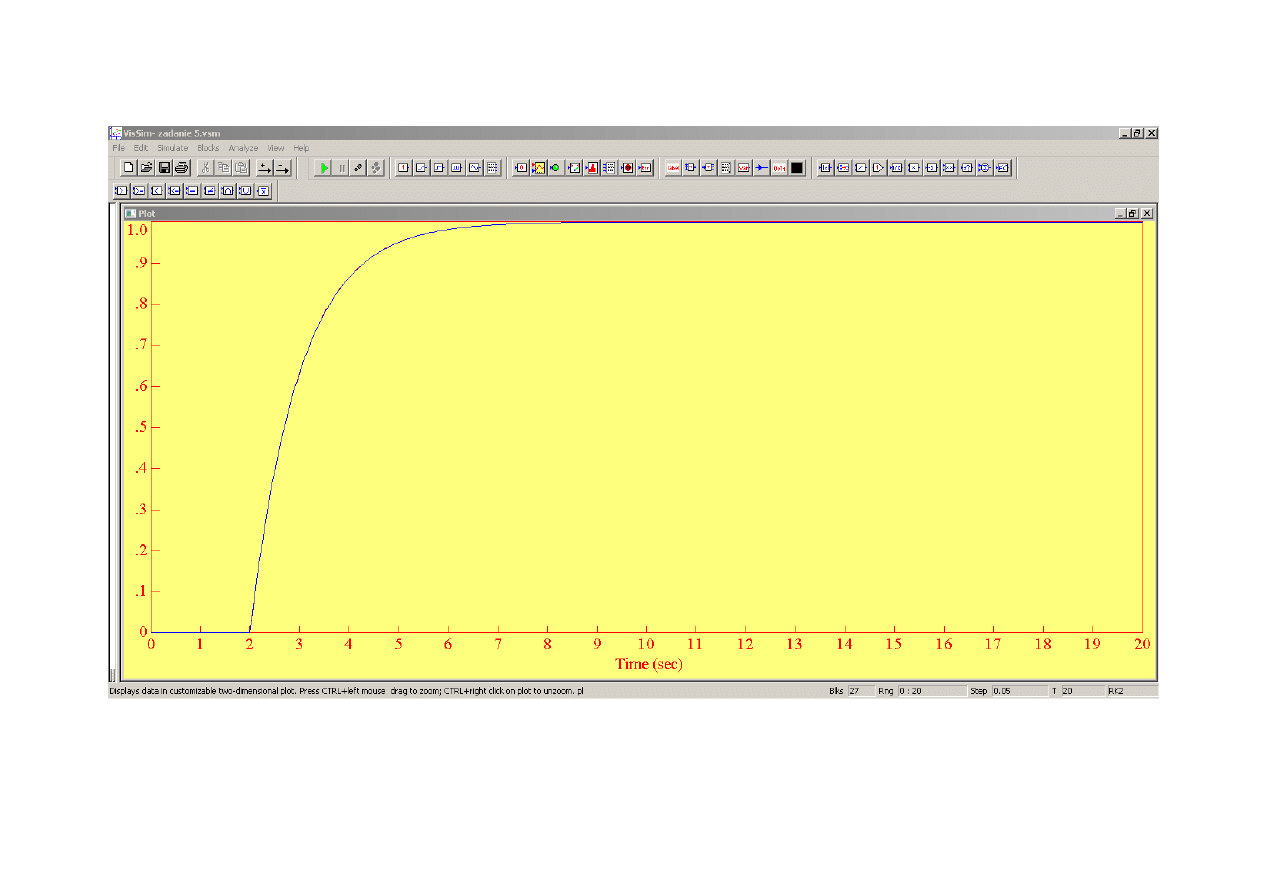
Charakterystyka dynamiczna
Jak widać powyżej charakterystyki y(t) oraz yy(t) pokryły się co oznacza, że zadanie zostało wykonane prawidłowo.
26
Odpowiedź Nyquist response
Odpowiedź Frequency response (Bode-Phase)
Odpowiedź Frequency response (Bode-
Magnitude)
Za pomocą tego członu można modelować układy należące do dwóch rodzajów: hydraulicznych oraz elektrycznych z obwodami
magnetycznymi. W urządzeniach hydraulicznych niewielka zmiana objętości powoduje gwałtowny skok cisnienia cieczy roboczej, malejącego
następnie na skutek np. nieszczelności. W transformatorach elektrycznych skok napięcia w obwodzie pierwotnym powoduje wystąpienie
przepięcia po stronie wtórnej, malejącego w czasie wskutek przepływu prądu wtórnego w tym obwodzie.
Przykładem członu różniczkującego rzeczywistego jest czwórnik elektryczny CR.
Wyszukiwarka
Podobne podstrony:
El sprawko 5 id 157337 Nieznany
plastiki sprawko id 362078 Nieznany
automatyka wykl 1 id 73377 Nieznany
przetwarzanie sprawko 3 id 4066 Nieznany
Automatyka i robotyzacja id 733 Nieznany
4 2 RG Automaty skonczone id 38 Nieznany (2)
automatyka c2 id 73267 Nieznany (2)
Automatyka i Robotyka id 73294 Nieznany
automaty 3d id 72987 Nieznany (2)
Automatyka napedow id 73330 Nieznany
3 Sprawko id 34095 Nieznany
Automatyka pytania id 73347 Nieznany
Elektronika cw6 sprawko id 1589 Nieznany
DC impulsowo sprawko id 132337 Nieznany
Metrologia Sprawko id 297285 Nieznany
IG, sprawko 4 5 id 209607 Nieznany
automaty tokarskie id 73020 Nieznany
automatyka sciaga id 73348 Nieznany
więcej podobnych podstron