AUTOMATYKA I ROBOTYKA
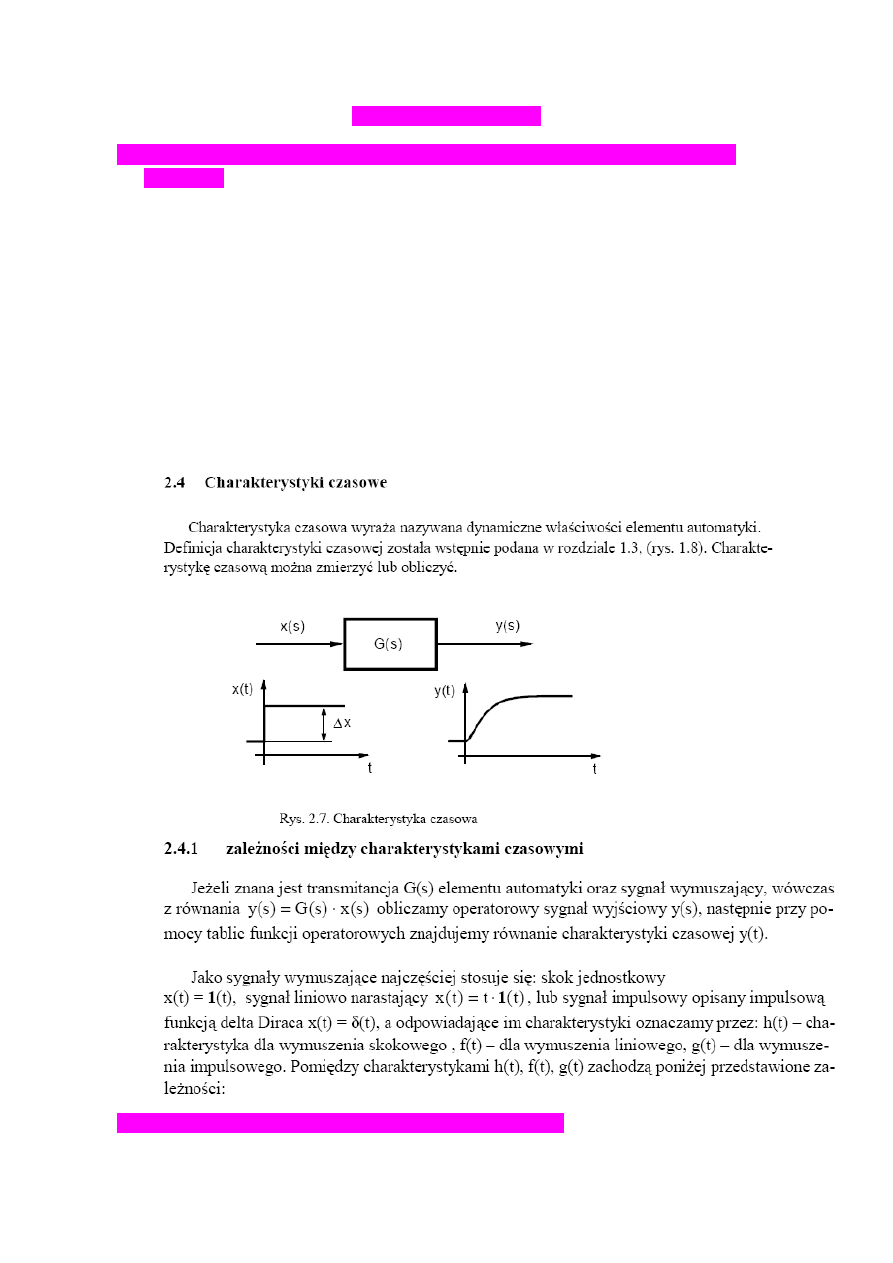
1. Jakiego rodzaju sygnały wymyuszające są stosowane przy wyznaczaniu charakterystyk
czasowych?
a)
Skok jednostkowy
(Funkcja skokowa Heaviside`a), jest funkcją nieciągłą, która przyjmuje
wartości 0 dla ujemnych argumentów i 1 w pozostałych przypadkach.
b) Widmo częstotliwości
c) Sygnał harmoniczny
d)
Impuls Diraca
(delta Diraca)
Charakterystyka impulsowa (odpowiedź impulsowa) - to
odpowiedź układu na wymuszenie w postaci delty Diraca przy
zerowych warunkach początkowych. Znajomość odpowiedzi
impulsowej pozwala nam przewidzieć odpowiedź układu na
każde inne pobudzenie. Odpowiedź układu na dowolne
pobudzenie jest bowiem splotem sygnału pobudzającego oraz
odpowiedzi impulsowej układu.
2. Jaki jest warunek konieczny i wystarczający stabilności układu?
Stabilnośd układu automatycznej regulacji – niezbędny warunek pracy
mówiący o tym, że układ po wyprowadzeniu go ze stanu równowagi sam powraca do tego
stanu. Ponieważ stan równowagi może byd różnie interpretowany stosuje się także definicję
stabilności wg Laplace'a, która mówi, że układ liniowy jest stabilny, jeżeli jego odpowiedź na
wymuszenie (zakłócenie) o ograniczonej wartości jest ograniczona.
Kryteria stabilności
1. Kryterium biegunów
Wszystkie pierwiastki równania charakterystycznego układu zamkniętego powinny być
ujemne, czyli znajdować się w lewej półpłaszczyźnie.
2. Kryterium odpowiedzi skokowej
Układ zamknięty w odpowiedzi na skok jednostkowy powinien osiągać stan ustalony w
czasie dążącym do nieskonczoności.
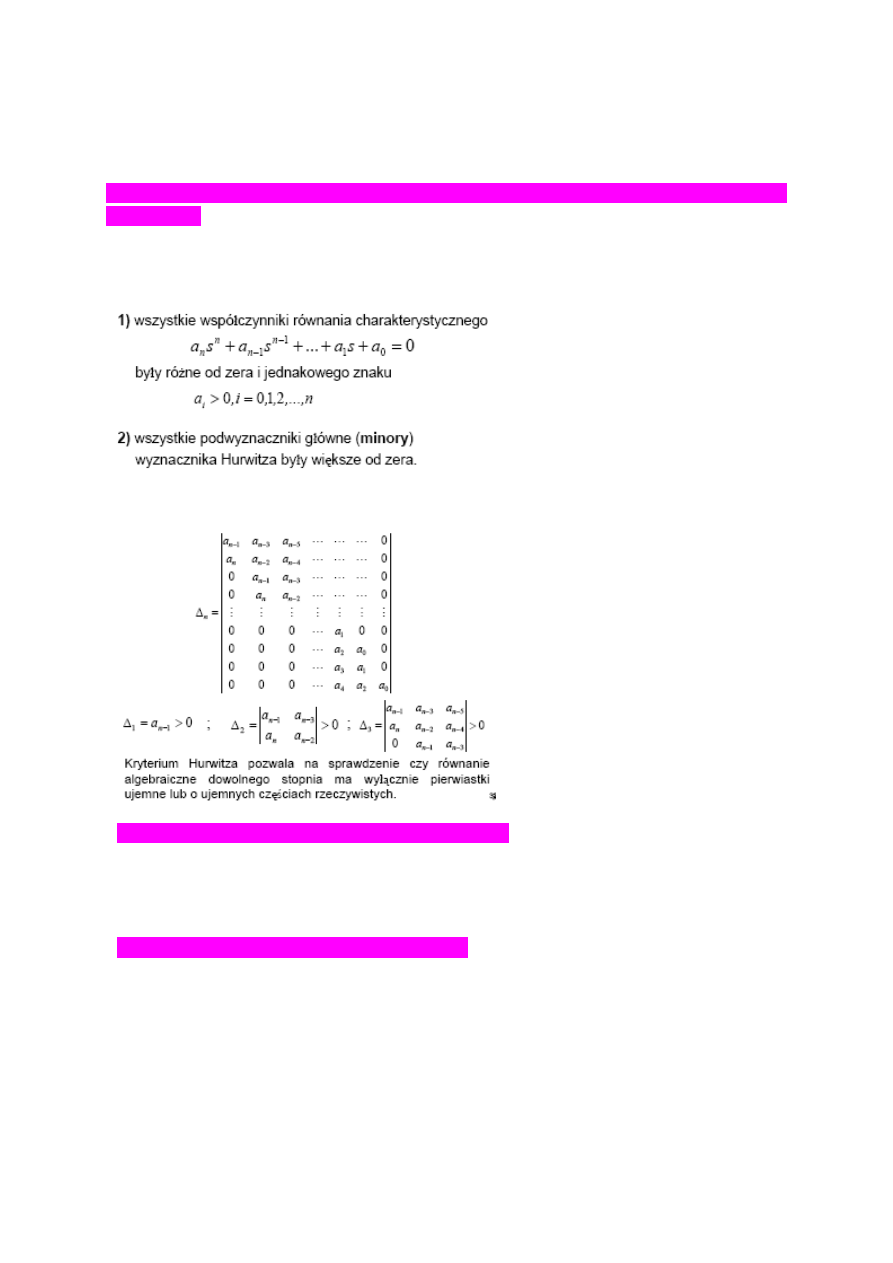
3. Kryterium Hurwitza
Pierwiastki równania charakterystycznego układu zamkniętego będą znajdować się w lewej
półpłaszczyźnie (układ będzie stabilny), jeśli spełnione zostaną 2 warunki:
a) Wszystkie współczynniki równania charakterystycznego muszą istnieć i mieć ten sam znak
b) Wszystkie podwyznaczniki wyznacznika głównego (posiadającego n wierszy i n kolumn)
muszą być większe od 0
4. Kryterium Michajłowa
Równanie charakterystyczne układu zamkniętego ma wszystkie pierwiastki w lewej
półpłaszczyźnie, jeśli przyrost argumentu równania charakterystycznego w postaci widmowej
przy zmianie pulsacji od 0 do
wynosi
, gdzie n jest stopniem równania.
5. Kryterium Nyquista
Układ zamknięty jest stabilny, jeżeli charakterystyka amplitudowo-fazowa układu otwartego
nie obejmuje punktu (-1,j0).
6. Kryterium logarytmiczne Nyquista
Układ zamknięty jest stabilny, jeżeli logarytmiczna charakterystyka amplitudowa układu
otwartego posiada wartość ujemną dla pulsacji odpowiadającej przesunięciu fazowemu .
a) Wszystkie pierwiastki rzeczywiste i części rzeczywiste pierwiastków zespolonych powinny
byd ujemne.
b) Krotnośd pierwiastkow rzeczywistych równych zeru i krotnośd par pierwiastków urojonych,
powinna byd co najwyżej równa jedności
c) Na osi urojonej występują pierwiastki pojedyncze
d) Wszystkie podwyznaczniki główne (minory) były większe od zera.
3. Jakim układem jest obiekt z samowyrównaniem:
a) Obiektem, którego wartośd odpowiedzi skokowej dąży do wartości skooczonej
b) Obiektem, którego wartośd odpowiedzi skokowej dąży do nieskooczoności
c) Statycznym
d) Całkującym z inercją
Obiekty regulacji klasyfikuje się zwykle ze względu na ich własności dynamiczne.
Podstawowym kryterium podziału obiektów regulacji jest samodzielne osiąganie
stanu trwałej równowagi po wprowadzeniu skokowego wymuszenia sygnału
wejściowego.
Zgodnie z tym kryterium rozróżnia się dwie grupy obiektów:
Obiekty astatyczne
(bez samowyrównania), których wartość odpowiedzi skokowej
dąży do nieskończoności.
Obiekty statyczne (z samowyrównaniem), których odpowiedzi skokowe dążą do wartości
skooczonej.
4. Głównym prawem (zadaniem) układu regulacji jest:
a) Zastosowanie regulatora z członem całkującym
b) Utrzymanie uchybu na poziomie bliskim zeru
c) Utrzymanie ujemnej wartości uchybu
d) Ograniczenie przeregulowania
, posiadający ujemne
, którego
stosunku do układu regulacji.
Sens stosowania regulacji wynika z obecności zakłóceń. Sygnał sterujący oddziaływuje na
obiekt tak, aby został osiągnięty jak najmniejszy uchyb e(t) tzn. aby x(t) był możliwie
najbliższy x
0
(t). Uchyb regulacji e(t) = x
0
(t) - x(t)
stanowi więc elementarną miarę spełnienia
podstawowego zadania.
W idealnym układzie regulacji uchyb powinien być równy zeru
(cecha definicyjna układu regulacji).
Istotne jest przy tym, aby dążenie do zlikwidowania
uchybu miało miejsce nawet przy niewielkiej informacji początkowej o obiekcie,
ewentualnych zmianach własności obiektu czy zakłóceniach.
5. Transmitancja operatorowa jest to:
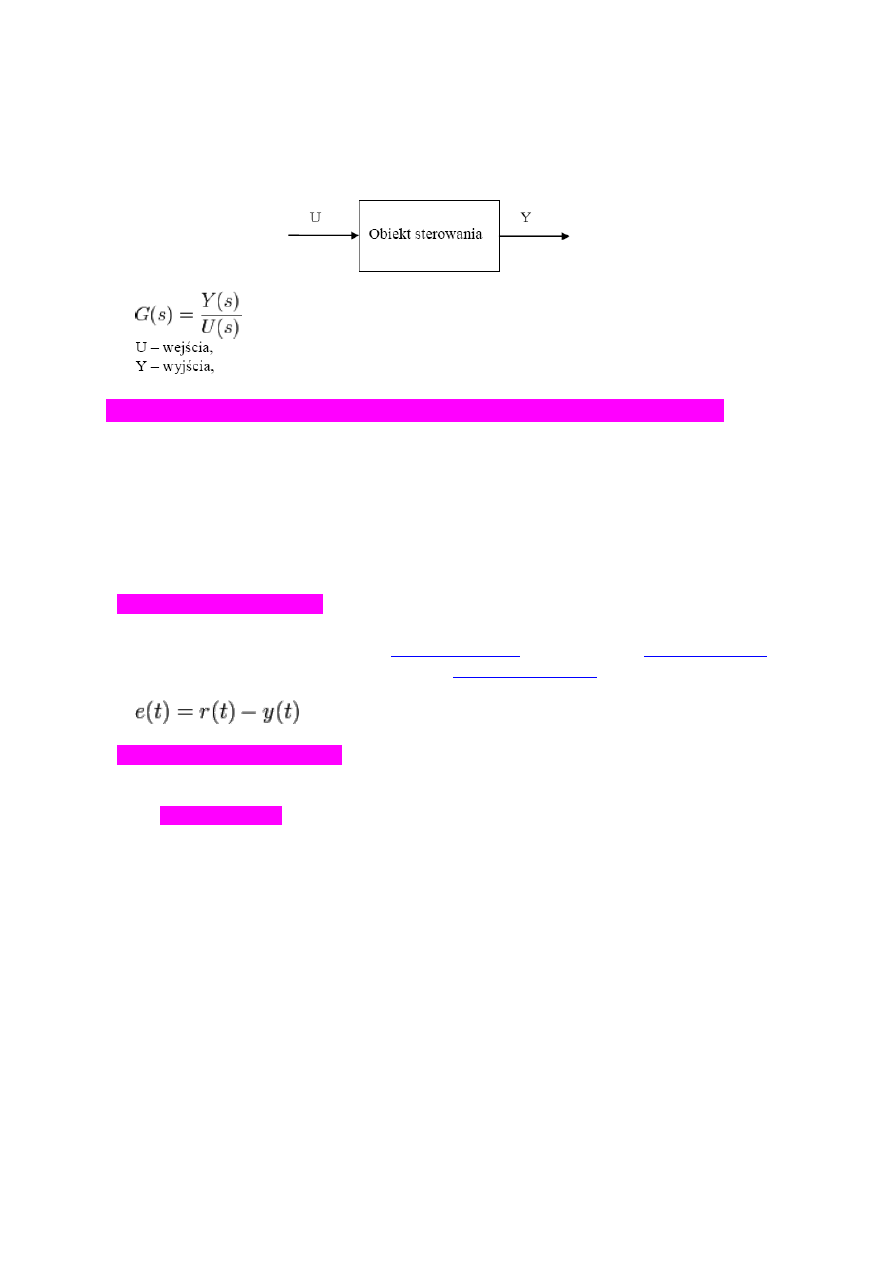
Transmitancja operatorowa (funkcja przejścia G(s))- stosunek transformaty Laplace`a sygnału
wyjściowego do transformaty Laplace`a sygnału wejściowego układu przy zerowych wartościach
początkowych:
5A. Transmitancja operatorowa układu automatyki przedstawia zależnośd pomiędzy:
a. Sygnałami wejściowym i wyjściowym, przy zerowych warunkach początkowych
b. Transformatami Laplace’a sygnału wyjściowego i wejściowego, przy zerowych
warunkach początkowych
c. Transformatami Fourier’a sygnału wyjściowego i wejściowego, przy zerowych
warunkach początkowych
d. Transformatami Laplace’a sygnału wyjściowego i wejściowego, przy niezerowych
warunkach początkowych
6. Co to jest uchyb regulacji?
Uchyb regulacji (błąd sterowania) - w
, różnica między
sygnału oraz wartością sygnału wyjściowego w
7. Sygnały deterministyczne to:
Sygnały dzieli się na
:
- deterministyczne i losowe,
- ciągłe i dyskretne
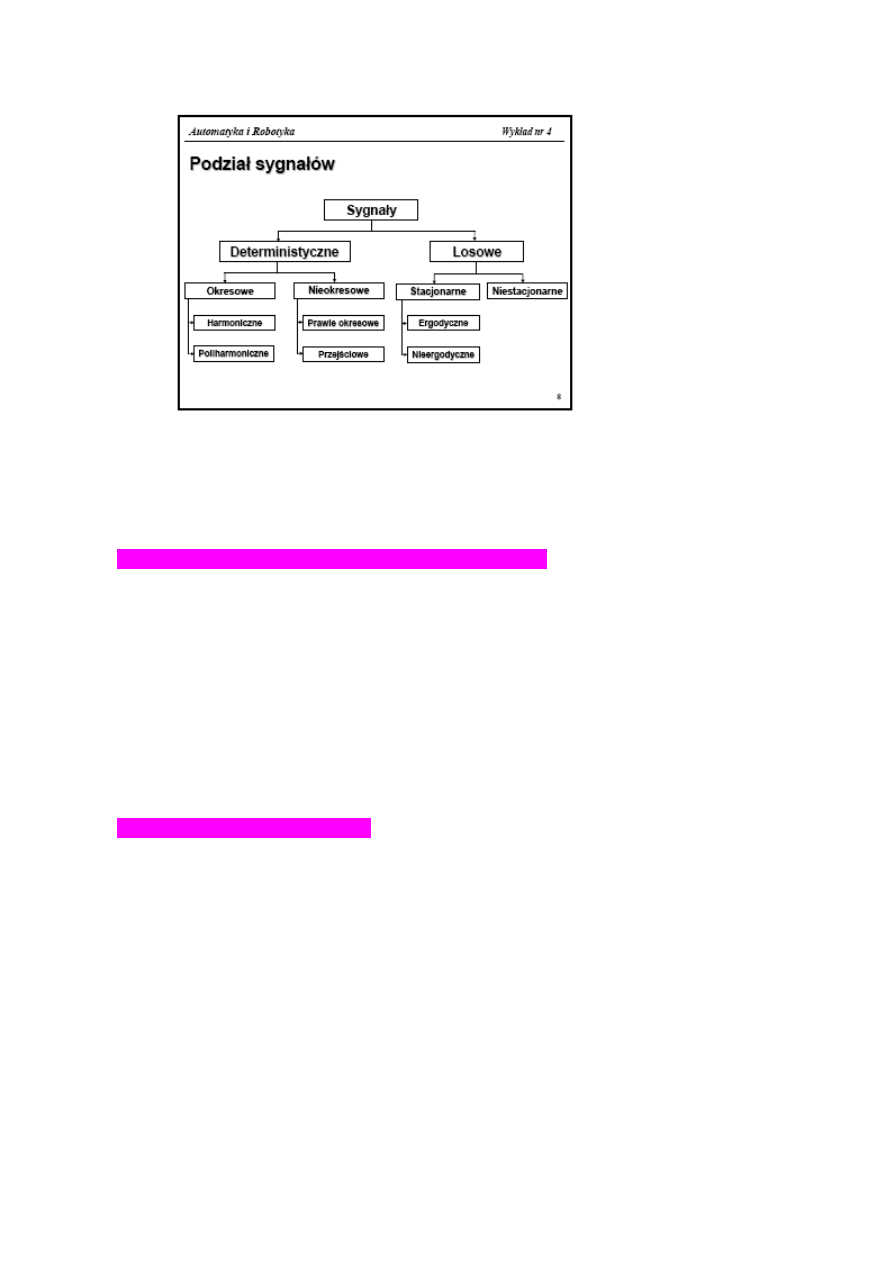
Sygnały deterministyczne dzielimy na okresowe i nieokresowe. Okresowe to harmoniczne i
poliharmoniczne, a nieokresowe to prawie okresowe i przejściowe.
8. Czynnikami wpływającymi na dokładnośd manipulatora są:
Dokładnośd manipulatora określa jak blisko manipulator może dojśd do znanego punktu w
przestrzeni roboczej. Na dokładnośd manipulatora wpływają:
1. Błędy obliczeniowe
2. Dokładnośd obróbki poszczególnych elementów konstrukcyjnych
3. Elastycznosd poszczególnych członów
4. Luzy w przekładniach
5. Wiele innych elementów statycznych i dynamicznych.
9. Co to jest liczba stopni swobody?
Liczba stopni swobody to klasa pary biokinematycznej (związane ze stawami).
Para biokinematyczna- ruchome połączenie członów, mające wzajemnie ograniczone ruchy i przynajmniej
jeden punkt styczny
Stopieo swobody- możliwośd ruchu, niezależny ruch członów w stawie, liczba równao określających
położenie członu w przestrzeni, wiąże się z liczbą płaszczyzn w jakich może byd wykonywany ruch. Każdy
stopieo swobody obsługiwany jest co najmniej parę mięśni (synergista- anatgonista). Każdy człon posiada
maksymalnie 6-stopni swobody (współrzędne tego członu na osiach x, y, z, i kąty obrotu tego ciała
,
,
).
U człowieka, stawy, ze względu na budowę i ograniczenia posiadają tylko trzy stopnie swobody (związane
jest to z ruchami obrotowymi w tych stawach). Człowiek posiada w sumie 244 stopnie swobody.
Klasa pary biokinematycznej- liczba więzów nałożonych na daną parę biokinematyczną, stopieo uwiązania
10. Do czego mogą byd wykorzystane charakterystyki częstotliwościowe?
Charakterystyka częstotliwościowa to odpowiedź obiektu w stanie ustalonym na sinusoidalny sygnał
wejściowy.
Charakterystyki częstotliwościowe:
- dokładnie identyfikują obiekt (określają jego własności dynamiczne)
- potrzebne do doboru nastaw regulatorów – układ regulacji musi posiadad odpowiednią jakosd np. w
samochodzie nie mogą byd odczuwane drgania od drogi (aktywne zawieszenie w samochodzie)
- w samojezdnych robotach (wpływ drgan drogi na zmianę kierunku jazdy)
- pokazują jak zachowuje się obiekt jeśli wzrasta częstotliwośd sygnałów wejściowych
- w ten sposób można okreslic zakres częstotliwości sygnałów, dla których regulacja ma pożądaną
jakośd
- można za ich pomocą badad stabilnośd układu regulacji
- przykład cieplny – budynek i zmiana temperatury powietrza zewnętrznego
11. Nastawy regulatora PID można dobrad metodą Zieglera- Nicholsa:
Regulator PID= regulator proporcjonalno- całkowo- różniczkowy.
12. Uchyb regulacji może byd wywołany przez:
Uchyb regulacji e(t)jest różnicą pomiędzy wartością zadaną, a regulowaną i może byd wywołany
przez:
- zakłócenia
- zmianę wartości zadanej
- zmianę parametrów układu.
e(t)=w(t)-y(t)
13. Co to jest charakterystyka częstotliwościowa:
Charakterystyka częstotliwościowa jest to odpowiedź obiektu w stanie ustalonym na sinusoidalny
sygnał wejściowy.
14. Co to jest dokładnośd dynamiczna układu automatycznej regulacji?
Dokładnośd dynamiczna- określa zdolnośd układu do wiernego i szybkiego śledzenia zmiany
wartości zadanej.
15. Jakie są podstawowe własności transmitancji?
Własności:
- transmitancja układu automatyki jest jego modelem matematycznym
- transmitancja jest własnością samego układu, niezależną od wielkości i natury sygnału
wejściowego
- transmitancja przedstawia związki między sygnałami wyjściowym i wejściowym, nie dostarcza
natomiast żadnej informacji na temat fizycznej struktury układu
- transmitancje wielu fizycznie różnych układów mogą byd identyczne
Właściwości:
- jeśli transmitancja układu jest znana, to możemy określic sygnał wyjściowy dla różnych sygnałów
wejściowych
- raz określona transmitancja daje pełny opis charakterystyk dynamicznych układu, w odróżnieniu od
jego opisu fizycznego
- postad transmitancji operatorowej stanowi kryterium klasyfikacji elementów automatyki
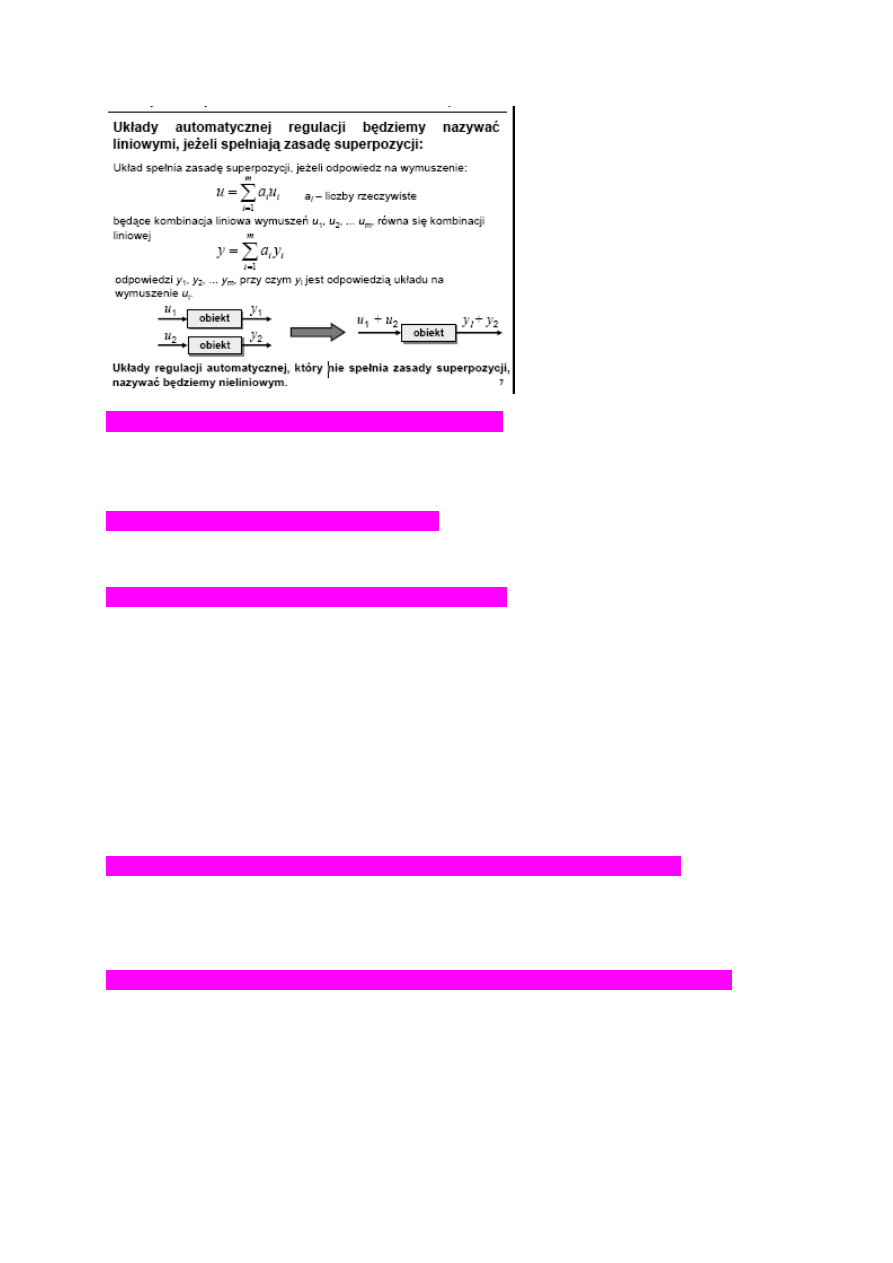
16. Czym charakteryzują się układy liniowe?
Układy liniowe o stałych parametrach można opisad za pomocą liniowego równania różniczkowego o
stałych współczynnikach.
Z tego równania wynika charakterystyka statyczna, na podstawie której wnioskujemy o
właściwościach statycznych układu.
Właściwości dynamiczne U L określa się na podstawie przebiegu sygnału wyjściowego y(t), będącego
wynikiem wprowadzenia odpowiedniego sygnału wejściowego x(t).
CECHY- układy liniowe są:
- liniowe, więc można zastosowad zasadę superpozycji
- odpowiedź U L może byd wyrażona jako splot wejścia x(t) i odpowiedzi impulsowej g(t) układu.
Liniowe- opisane liniowymi równaniami algebraicznymi, różniczkowymi itp.
17. Co mówi zasada superpozycji?
18. Układy regulacji stałowartościowej charakteryzują się:
Regulacja stałowartościowa- polega na utrzymywaniu stałej wartości wielkości regulowanej (wielkośd
zadana w=const).
19. Układy regulacji nadążnej charakteryzują się:
Regulacja nadążna- tu wartośd zadana zmienia się w sposób niezdeterminowany (w=?)
20. Podstawowymi elementami schematów blokowych są:
- elementarne bloki dynamiczne
(są to symbole operacji matematycznych wykonywanych na
sygnałach wejściowych i wytwarzających odpowiednie sygnały wyjściowe. Przedstawiane są w
postaci prostokątów z umieszczonymi wewnątrz informacjami dotyczącymi ich właściwości- w UL
zwykle podaje się transmitancję operatorową)
- węzły zaczepowe (informacyjne
)- umożliwiają przekazanie tej samej informacji do kilku różnych
punktów schematu blokowego ( jedno wejście i co najmniej dwa wyjścia)
- węzły sumacyjne
(umożliwiają algebraiczne sumowanie kilku sygnałów- jedno wyjście i co najmniej
dwa wyjścia z uwzględnieniem znaku sygnału)
21. Zastosowanie jakiego regulatora pozwoli na zlikwidowanie uchybu statycznego?
Zwiększenie wzmocnienia K
p
regulatora typu P pozwala na zmniejszenie uchybu statycznego.
Działanie całkujące regulatora powoduje, że uchyb statyczny e
U
=0
22. Na podstawie jakich parametrów odpowiedzi skokowej można oceniad jakośd regulacji?
Jakośd regulacji określa się w tym przypadku na podstawie następujących parametrów:
- czas t
d
- czas narastania (czas wzrostu t
1
)
- czas szczytowy t
m
- maksymalne przeregulowanie A
1
- czas regulacji t
r
23. Warunkiem koniecznym i wystarczającym stabilności układów liniowych według kryterium
Hutwitza jest:
Warunkiem koniecznym i wystarczającym żeby układ liniowy stacjonarny ciągły był stabilny
asymptotyczie jest, aby:
24. Podstawowe metody opisów układów automatyki to:
Opis parametryczny i nieparametryczny (?)
Schematy blokowe, grafy przepływu sygnałów
25. Co w algebrze grafów oznacza pojęcie kaskada?
Kaskada= połączenie szeregowe (kaskadowe, łaocuchowe)- to takie połączenie, w którym sygnał
wyjściowy jednego bloku jest jednocześnie sygnałem wejściowym do następnego bloku.
Transmitancja wypadkowa członów połączonych szeregowo jest równa iloczynowi transmitancji
tych członów.
W ALGEBRZE GRAFÓW KASKADA TO:
Ścieżka zaczynająca się w węźle źródłowym i koocząca się w węźle odbiorczym. (patrz pyt 26).
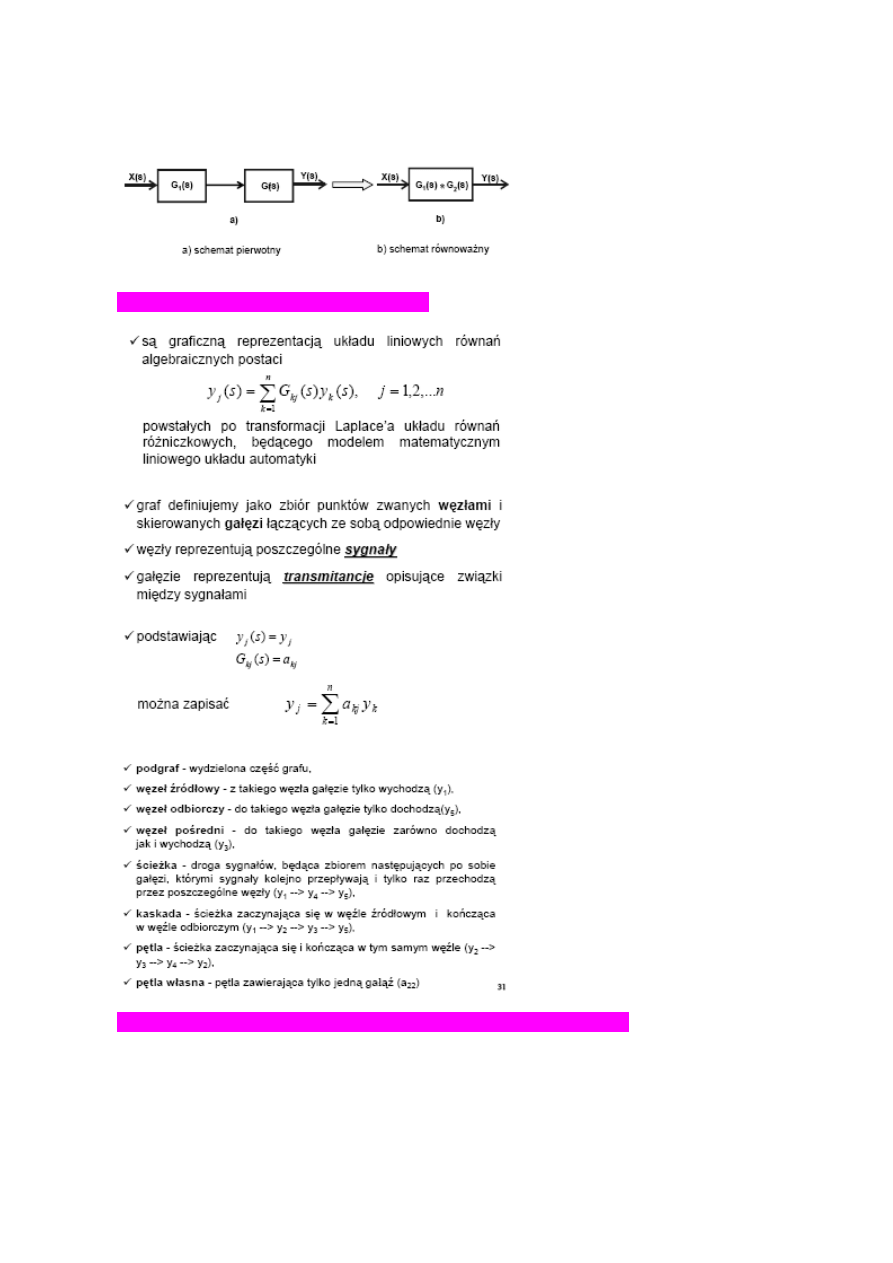
26. Podstawowe elementy algebry grafów to:
27. W którym miejscu układu regulacji może byd umiejscowiony regulator?
28. Czym się charakteryzują modele parametryczne?
Modele parametryczne w
to modele o ściśle zdefiniowanej strukturze.
Identyfikacja takich modeli zazwyczaj rozpoczyna się od etapu identyfikacji samej struktury, gdyż od
niej bezpośrednio zależy liczba parametrów, których wartości będzie trzeba wyznaczyd na dalszym
etapie (dla niektórych zastosowao, na przykład dla syntezy
, wystarcza
samo określenie struktury). Po wyznaczeniu struktury modelu, sam etap wyznaczania wartości
parametrów nazywa się często etapem
parametrów dla podkreślenia, że jest to jedynie
jeden z koocowych etapów całego procesu
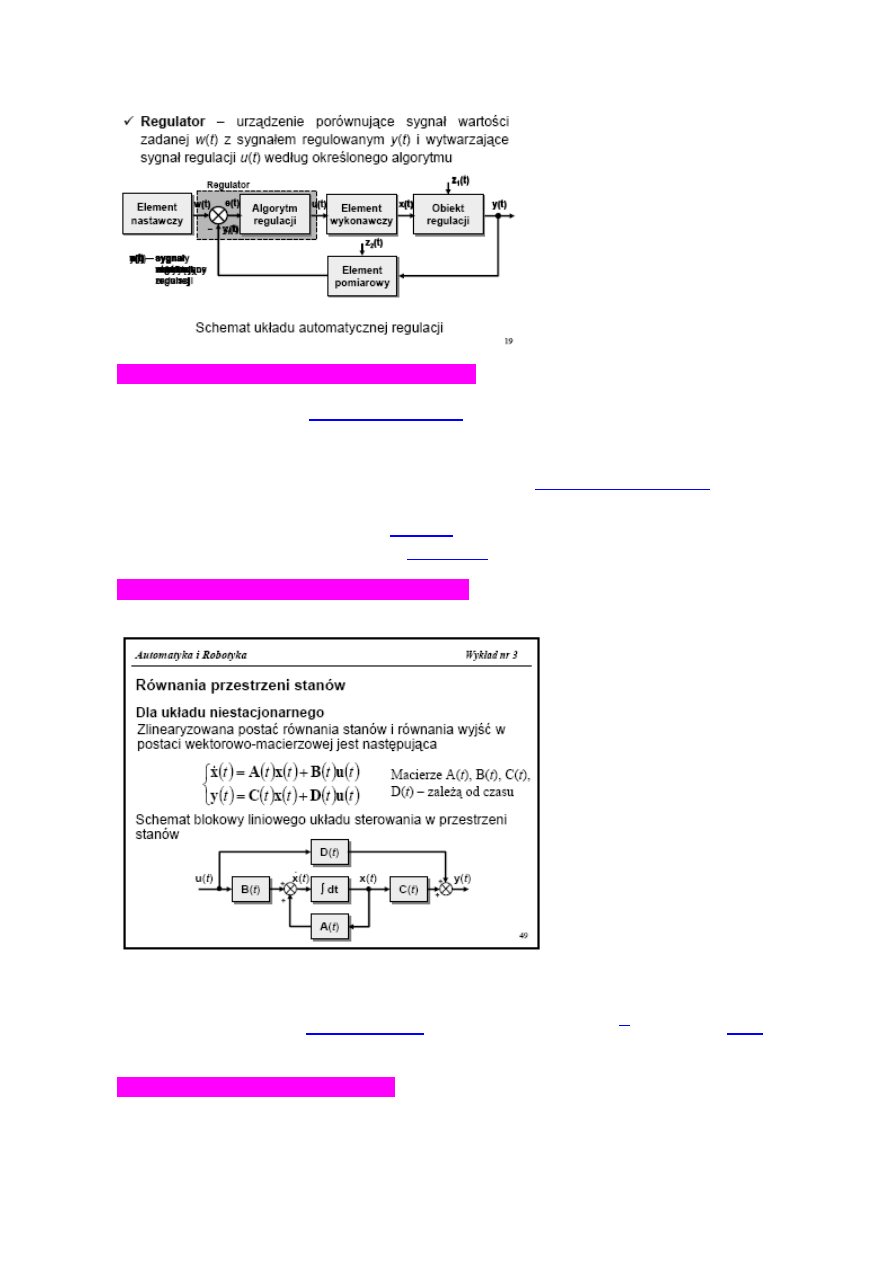
29. Czym charakteryzują się układy niestacjonarne?
Układ niestacjonarny - w
przez układ niestacjonarny
, w
którym parametry zależą od czasu.
30. Regulatory o działaniu pośrednim to:

Regulatory pośredniego działania zasilane energią elektryczną są nazywane regulatorami
elektrycznymi, zasilane sprzężonym powietrzem- regulatorami pneumatycznymi i regulatory
zasilane olejem- regulatorami hydraulicznymi.
Wyszukiwarka
Podobne podstrony:
OU pytania id 342624 Nieznany
MG pytania id 297579 Nieznany
Cierpialkowska pytania id 11706 Nieznany
automatyka pytania id 73187 (2)
biogeografia pytania id 87155 Nieznany (2)
automatyka wykl 1 id 73377 Nieznany
kreska pytania id 250564 Nieznany
Automatyka i robotyzacja id 733 Nieznany
odpowiedzi na pytania 2 id 3325 Nieznany
Pogadanka pytania id 369678 Nieznany
elektro pytania id 157897 Nieznany
4 2 RG Automaty skonczone id 38 Nieznany (2)
automatyka sprawko 2 id 73363 Nieznany
automatyka c2 id 73267 Nieznany (2)
Automatyka i Robotyka id 73294 Nieznany
Mechanika plynow PYTANIA id 291 Nieznany
automaty 3d id 72987 Nieznany (2)
opracowane pytania 2 id 337625 Nieznany
więcej podobnych podstron