Politechnika Rzeszowska
1
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz
Rzeszów, 5.05.2006
BADANIE NAPĘDU Z SILNIKIEM RELUKTANCYJNYM
PRZEŁĄCZALNYM (SRM)
Celem ćwiczenia jest zapoznanie się z budową, układem sterowania oraz sposobami
sterowania silnika reluktancyjnego przełączalnego (switched reluctance motor – SRM) oraz
sposobem kształtowania charakterystyk mechanicznych poprzez zmianę parametrów.
sterowania.
1. Opis sterownika SRM
Sterownik mikroprocesorowy SRM zastosowany w laboratorium umożliwia:
• regulację napięcia zasilającego silnik poprzez modulację szerokości impulsów
(PWM) w zakresie od około 0 do 100% U
dc
,
• regulację kąta załączenia
θ
on
w zakresie do –10
° do –2,5 ° (co 0,5 °),
• regulację kąta wyłączenia
θ
off
w zakresie od 30
° do 40° (co 0,5 °).
Klawisze funkcyjne sterownika
• klawisz „↵
↵
↵
↵” – START – rozruch silnika,
• klawisz „0” – STOP – zatrzymanie silnika,
• klawisz „1” – funkcja regulacji współczynnika wypełnienia PWM,
• klawisz „2” – funkcja regulacji kąta załączenia
θ
on
,
• klawisz „3” - funkcja regulacji kąta wyłączenia
θ
off
,
• klawisze „↑
↑
↑
↑” i „↓
↓
↓
↓” – umożliwiają zmianę wielkości regulowanej określonej przez
klawisze funkcyjne „1”, „2” i „3”.
Wyświetlacz
W zależności od aktualnie włączonej funkcji na wyświetlaczu wyświetlane są następujące
informacje:
• współczynnik wypełnienia sygnału PWM w „%”,
• kąt załączenia
θ
on
w stopniach,
• kąt wyłączenia
θ
off
w stopniach,
• prędkość obrotowa n [obr/min].
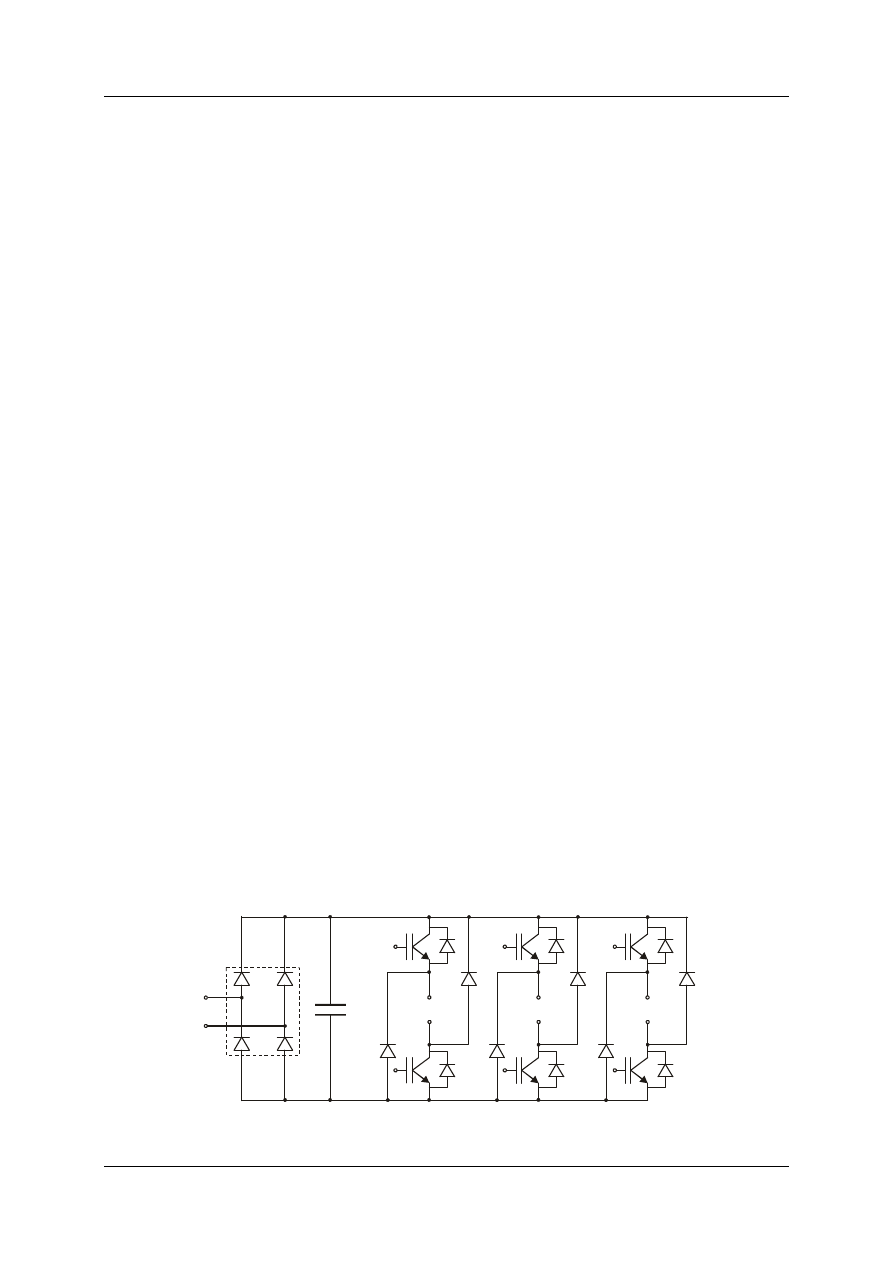
Układ zasilający
Na rysunku 1 przedstawiono schemat układu zasilającego zastosowanego w układzie
laboratoryjnym.
C
1
T
1
D
1
1
1’
D
2
T
2
2
2’
D
4
D
3
T
4
T
3
3
3’
D
6
D
5
T
6
T
5
~
M
1
Rys.1. Schemat układu zasilającego (falownika) zastosowanego w badaniach laboratoryjnych

Politechnika Rzeszowska
2
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz
Rzeszów, 5.05.2006
UWAGA !
o
Układ powinien być zasilany z zasilacza wyposażonego w funkcję ograniczenia
prądowego.
o
Na zaciski „Zasilanie” układu zasilającego nie należy podłączać napięcia
większego niż 60 V prądu stałego !
2. Dane zastosowanych maszyn
Silnik reluktancyjny przełączalny:
o
Napięcie zasilające:
U
dc
= 60 V
o
Prędkość:
n=6000 obr/min
o
Prąd pasmowy maksymalny ciągły:
I
phmaxC
= 2 A
o
Prąd pasmowy maksymalny 10-cio sekundowy:
I
phmax10s
= 3 A
o
Liczba pasm:
N
ph
=3
o
Liczba biegunów stojana:
N
s
=6
o
Liczba zębów wirnika:
N
r
=4
o
Rezystancja uzwojenia pasma stojana:
R
s
=5.2
Ω , @20°C
o
Szerokość bieguna stojana:
β
s
=36
°
o
Szerokość zęba wirnika:
β
r
=31
°
o
Indukcyjność własna w położeniu niewspółosiowym:
L
u
=0.019 H
o
Indukcyjność własna w położeniu współosiowym
(w stanie nienasyconym):
L
a
= 0.082 H
Prądnica bocznikowa DC:
o
Prąd wzbudzenia:
I
f
= 3 A
o
Prąd twornika:
I
a
= 3 A
3. Program ćwiczenia
3.1.Zapoznać się z podstawowymi danymi zastosowanych w układzie maszyn
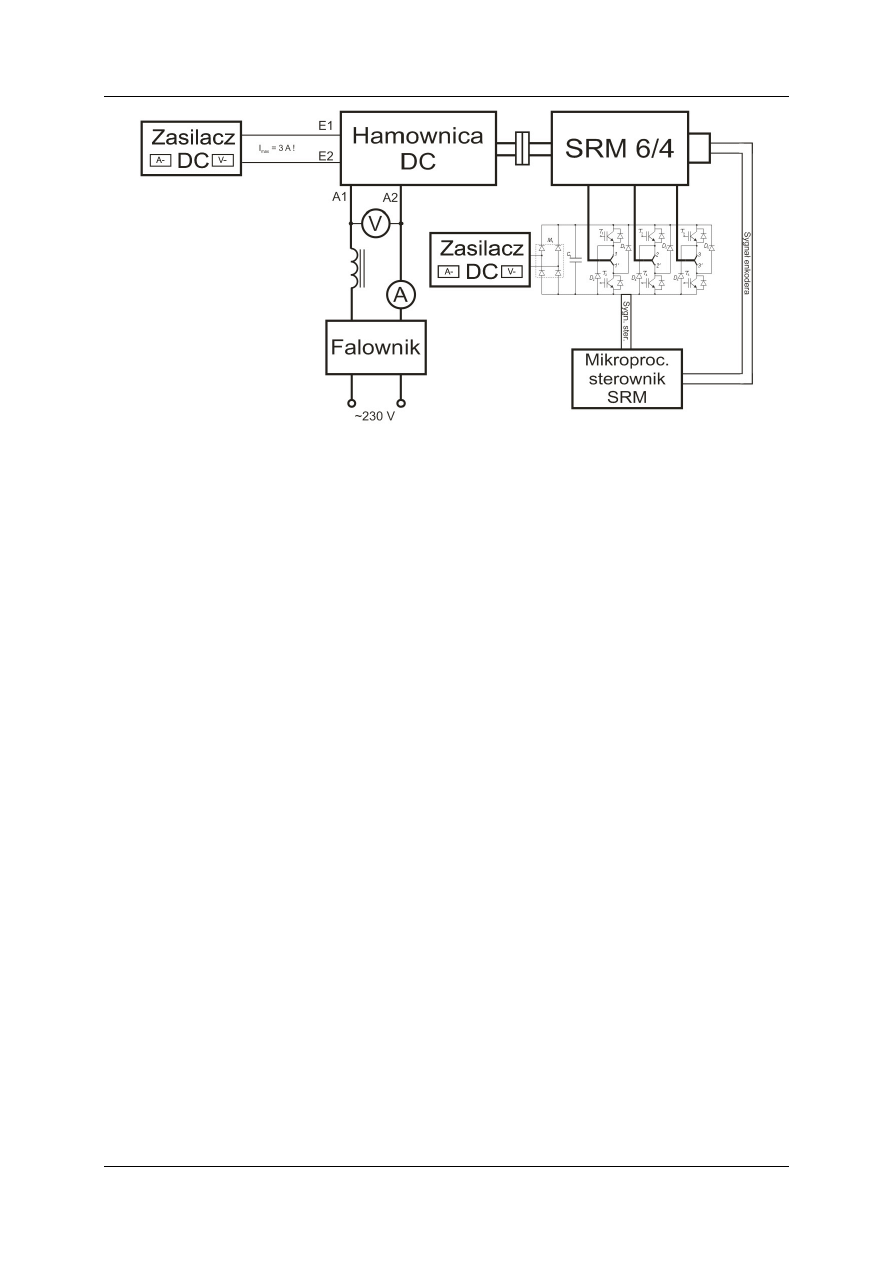
3.2.Połączyć układ wg schematu zamieszczonego na rysunku 2.
Politechnika Rzeszowska
3
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz
Rzeszów, 5.05.2006
Rys.2. Schemat układu połączeń
3.3.Ustawić na zasilaczu zasilającym silnik napięcie ok. 30 V
3.4.Uruchomić silnik przyciskiem „
↵”, a następnie zwiększyć napięcie na zasilaczu
do 60 V
3.5.Zarejestrować przebiegi prądów i napięć pasmowych silnika:
• dla dwóch różnych współczynników wypełnienia sygnału PWM (
ε
), przy
stałych kątach załączenia i wyłączenia (
θ
on
i
θ
off
= const)
• dla dwóch różnych kątów załączenia
θ
on
• dla dwóch różnych kątów wyłączenia
θ
off
3.6.Wyznaczyć ch-ki regulacyjne na biegu jałowym silnika:
• n=f(
ε
) przy
θ
on
i
θ
off
= const
• n=f(
θ
on
) przy
ε
i
θ
off
= const
• n=f(
θ
off
) przy
ε
i
θ
on
= const
3.7.Wyznaczyć ch-ki mechaniczne silnika reluktancyjnego przełączalnego (n=f(T
L
),
sprawności wypadkowej (
η
=f(T
L
) oraz prądu źródła zasilającego (I
dc
=f(T
L
) dla:
• dwóch różnych współczynników wypełnienia sygnału PWM (
ε
),
przy
θ
on
i
θ
off
= const
• dwóch różnych wartości kąta załączenia, przy
ε
i
θ
off
= const
Wyszukiwarka
Podobne podstrony:
cwiczenie nr 3 instrukcja id 12 Nieznany
Cwiczenia nr 2 RPiS id 124688 Nieznany
Cwiczenie nr 15 id 125710 Nieznany
Cwiczenia nr 6 RPiS id 124693 Nieznany
Cwiczenie nr 10 id 125701 Nieznany
Cwiczenia nr 4 RPiS id 124689 Nieznany
Cwiczenia nr 5 RPiS id 124692 Nieznany
Cwiczenie nr 60 id 99947 Nieznany
Cwiczenia obliczenia 2014 id 12 Nieznany
cwiczenie1 dos polecenia id 12 Nieznany
Cwiczenia nr 1 RPiS id 124683 Nieznany
Cwiczenia nr 9 (z 14) id 98690 Nieznany
cwiczenie nr 26 id 101103 Nieznany
mzt 71 Cwiczenie nr 71 id 78283 Nieznany
cwiczenie nr 46 id 101104 Nieznany
Cwiczenia nr 7 RPiS id 124695 Nieznany
Cwiczenia nr 8,9 RPiS id 124696 Nieznany
Cwiczenia nr 2 RPiS id 124688 Nieznany
więcej podobnych podstron